Performance Evaluation of a PID-Controlled Synchronous Buck Converter Based Battery Charging Controller for Solar-Powered Lighting System in a Fishing Trawler

 ,
, 
Abstract
:1. Introduction
2. Mathematical Model
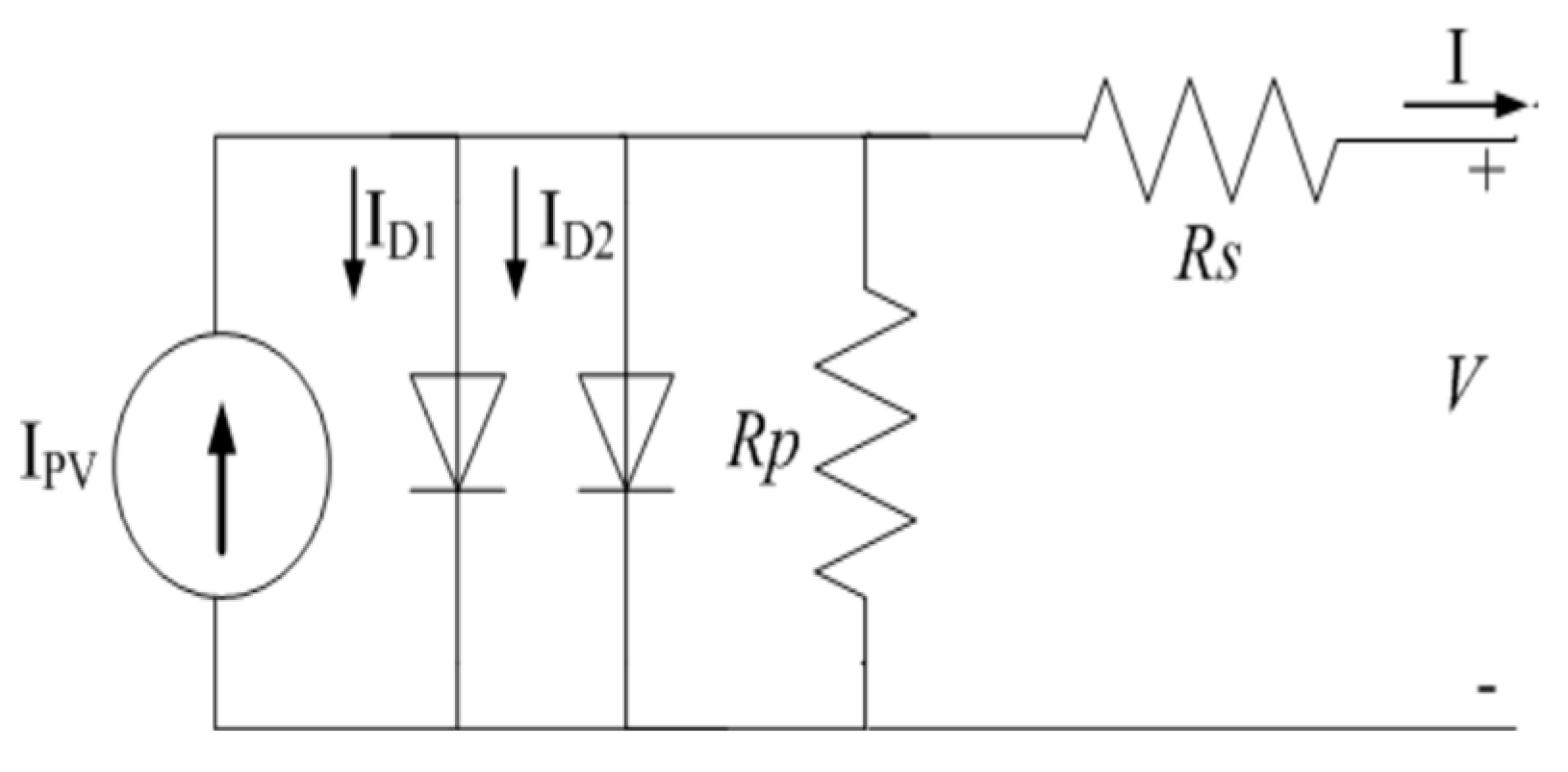
2.1. Model of the PV Cell
2.2. Model of the Battery
2.3. Model of the Controller Algorithm
PWMMAX|PWMDC > PWMMAX
0.5|PWMDC < 0.5
3. Design of Synchronous DC–DC Buck Converter
3.1. Design of the Synchronous Buck Converter with Filter
3.1.1. Duty Cycle
3.1.2. Inductor and Capacitor Selection
3.2. Loss Model Design of the Synchronous Buck Converter
- The temperature effect on semiconductor devices was not considered. Here all the parameters were considered for 150 °C maximum junction temperature rating according to the datasheet of a FQP50N60, 60 V N-Channel MOSFET.
- The loss due to the skin effect of the inductor was also neglected.
- The parasitic capacitance loss was also neglected.
- MODE 1 [t0 ≤ t ≤ t2]: High-side MOSFET QHG is on and conduction losses and switching power losses are raised. The switching power losses are calculated from the overlap area of the VDS and IDS;
- MODE 2 [t2 ≤ t ≤ t3 and t4 ≤ t ≤ t5]: The body diode losses arise as a function of the dead time when both QHG and QLG are off. There are two dead-time intervals as t2 ≤ t ≤ t3 and t4 ≤ t ≤ t5, which prevent short-through;
- MODE 3 [t3 ≤ t ≤ t4]: Low-side MOSFET QLG is turned on and conduction losses are taking place as there is only a voltage drop, which is equal to the forward voltage of the Schottky diode D1.
3.2.1. Semiconductor Losses
3.2.2. Inductor Losses
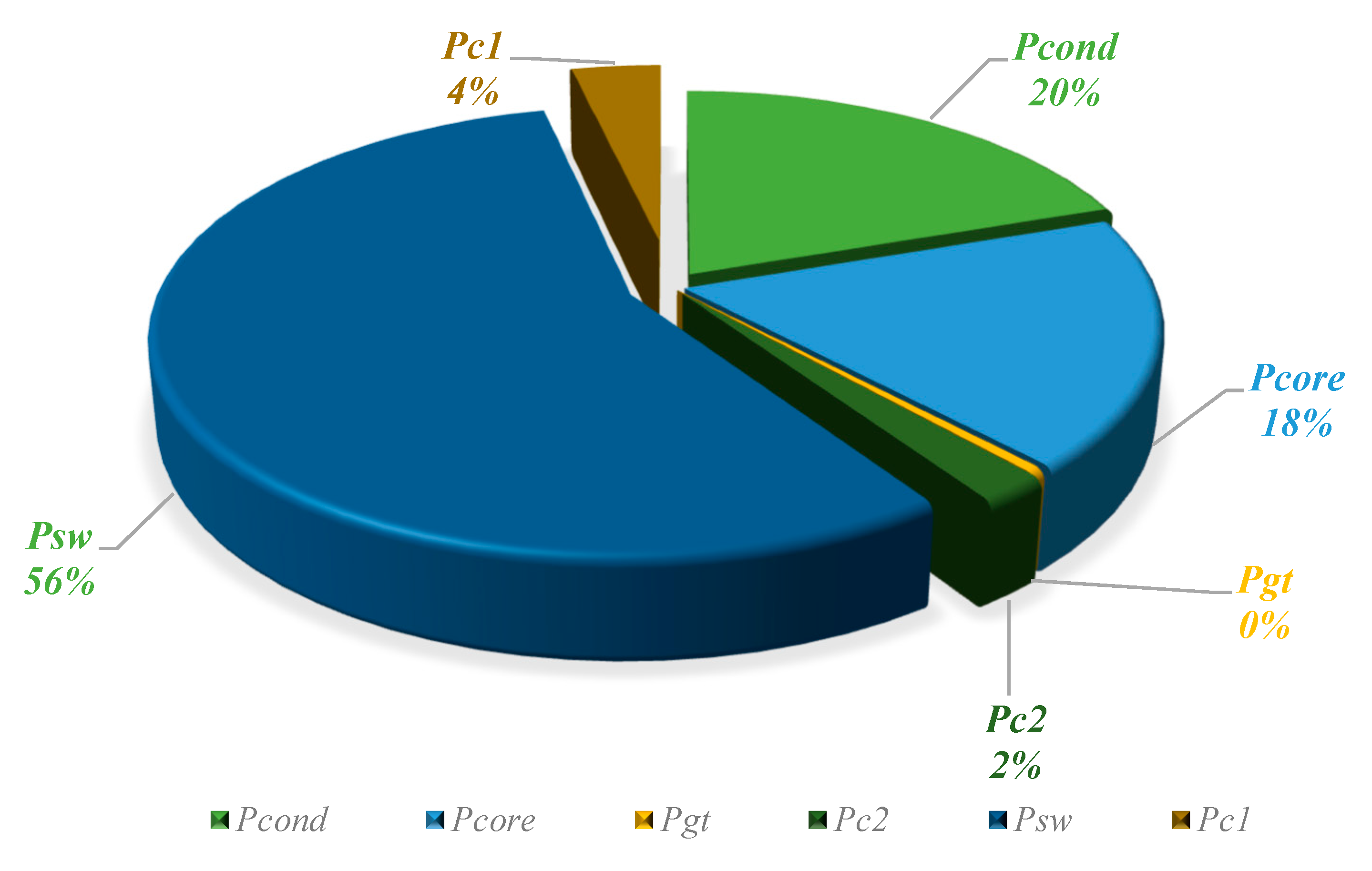
3.2.3. Total Power Losses of the SBC
4. Practical Implementation and Performance Evaluation
4.1. Selection of Project Location
4.2. Project Installation
4.3. System Efficiency during Field Trail
5. Result and Discussion
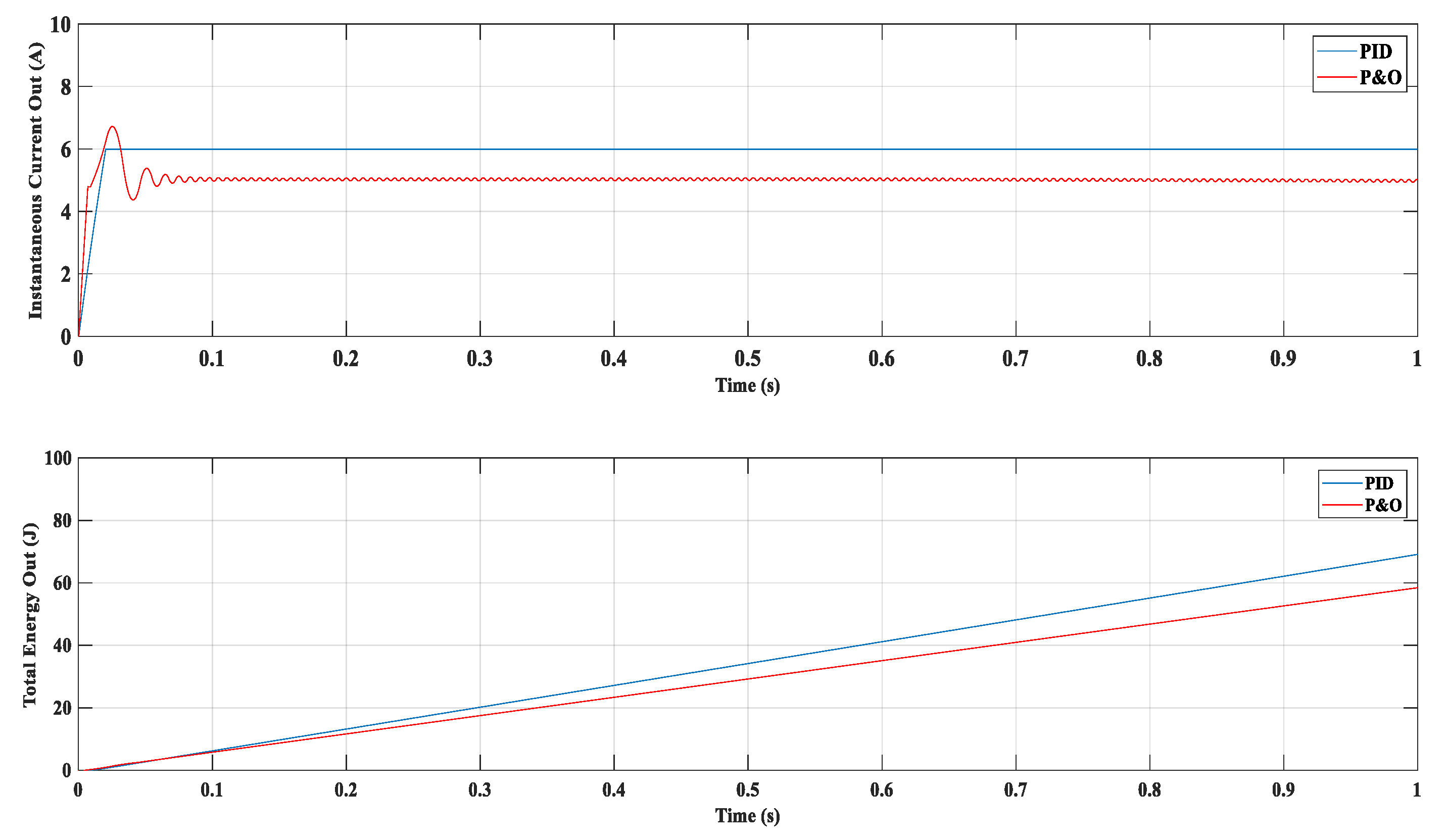
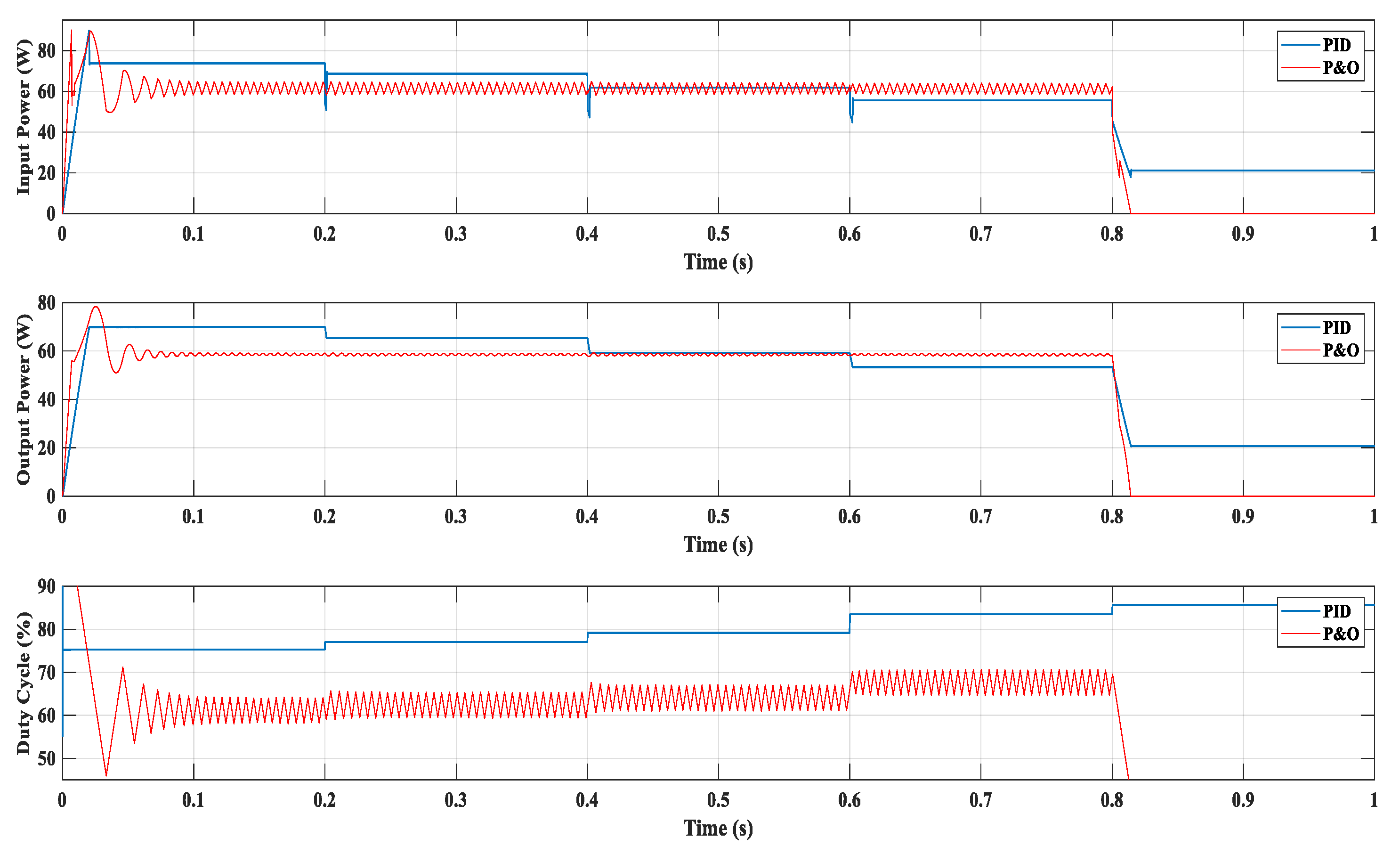
5.1. Simulation Comparison between the PID and MPPT Techniques
5.2. Comparison between the SBC Hardware and Simulation
5.3. The Field Trial Data Analysis
5.4. Synchronous Buck Converter Efficiency Verification
5.5. Social Impact
5.6. CO2 Reduction in the Proposed System
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Onboard Hardware System

References
- Chakraborty, S.; Ullah, S.M.S.; Razzak, M.A. Quantifying solar potential on roof surface area of fishing trawlers in Chittagong Region in Bangladesh. In Proceedings of the IEEE Innovative Smart Grid Technologies–Asia (ISGT-Asia), Melbourne, VIC, Australia, 28 November–1 December 2016; pp. 833–837. [Google Scholar]
- Van Mierlo, J.; Messagie, M.; Rangaraju, S. Comparative environmental assessment of alternative fueled vehicles using a life cycle assessment. Trans. Res. Procedia 2017, 25, 3439–3449. [Google Scholar] [CrossRef]
- Hil Baky, M.A.; Rahman, M.M.; Islam, A.K.M.S. Development of renewable energy sector in Bangladesh: Current status and future potentials. Renew. Sustain. Energy Rev. 2017, 73, 1184–1197. [Google Scholar] [CrossRef]
- Mondal, M.A.H.; Denich, M. Assessment of renewable energy resources potential for electricity generation in Bangladesh. Renew. Sustain. Energy Rev. 2010, 14, 2401–2413. [Google Scholar] [CrossRef]
- Bhowmik, N.C. Renew Energy Cooperation-Network for the Asia Pacific. Bangladesh Renew. Energy Rep. 2009, 1, 1–36. [Google Scholar]
- Lu, Y.; Dah-Chuan Lu, D. Analysis of a shunt maximum power point tracker for PV-battery system. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, NSW, Australia, 27–30 September 2015; pp. 1–6. [Google Scholar]
- Jordehi, A.R. Maximum power point tracking in photovoltaic (PV) systems: A review of different approaches. Renew. Sustain. Energy Rev. 2016, 65, 1127–1138. [Google Scholar] [CrossRef]
- Saravanan, S.; Ramesh Babu, N. Maximum power point tracking algorithms for photovoltaic system—A review. Renew. Sustain. Energy Rev. 2016, 57, 192–204. [Google Scholar] [CrossRef]
- Mankar, P.U.; Moharil, R.M. Perturb-and-Observe and Incremental Conductance Mppt Methods. Int. J. Res. Eng. Appl. Sci. 2014, 02, 60–66. [Google Scholar]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Sahu, H.S.; Nayak, S.K. Numerical approach to estimate the maximum power point of a photovoltaic array. IET Gener. Transm. Distrib. 2016, 10, 2670–2680. [Google Scholar] [CrossRef]
- Hlaili, M.; Mechergui, H. Comparison of Different MPPT Algorithms with a Proposed One Using a Power Estimator for Grid Connected PV Systems. Int. J. Photoenergy 2016, 2016, 1728398. [Google Scholar] [CrossRef]
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; e Melo, G.D.A.; Canesin, C.A. Evaluation of the Main MPPT Techniques for Photovoltaic Applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Abdel-rahim, O.; Funato, H.; Haruna, J. Novel Predictive Maximum Power Point Tracking Techniques for Photovoltaic Applications. J. Power Electron. 2016, 16, 277–286. [Google Scholar] [CrossRef] [Green Version]
- Thangavelu, A.; Vairakannu, S.; Parvathyshankar, D. Linear open circuit voltage-variable step-size-incremental conductance strategy-based hybrid MPPT controller for remote power applications. IET Power Electron. 2017, 10, 1363–1376. [Google Scholar] [CrossRef]
- Shukla, J.; Shrivastava, D.J. Analysis of PV Array System with Buck-Boost Converter Using Perturb & Observe Method. Ijireeice 2015, 3, 51–57. [Google Scholar]
- Shabrina, H.N.; Setiawan, E.A.; Sabirin, C.R. Designing of new structure PID controller of boost converter for solar photovoltaic stability. AIP Conf. Proc 2017, 1826. [Google Scholar] [CrossRef]
- Sowparnika, G.C.; Sivalingam, A.; Thirumarimurugan, M. Modeling and Control of Renewable Source Boost Converter using Model Predictive Controller. Int. J. Comput. Appl. 2015, 5, 43–51. [Google Scholar]
- Chiang, S.J.; Shieh, H.-J.; Chen, M.-C. Modeling and Control of PV Charger System with SEPIC Converter. IEEE Trans. Ind. Electron. 2009, 56, 4344–4353. [Google Scholar] [CrossRef]
- Abdulwahhab, O.M. Improvement of the MATLAB/Simulink Photovoltaic System Simulator Based on a Two-Diode Model. Int. J. Soft Comput. Eng. (IJSCE) 2014, 4, 117–122. [Google Scholar]
- Bellia, H.; Youcef, R.; Fatima, M. A detailed modeling of photovoltaic module using MATLAB. NRIAG J. Astron. Geophys. 2014, 3, 53–61. [Google Scholar] [CrossRef] [Green Version]
- Ishaque, K.; Salam, Z.; Taheri, H. Accurate MATLAB Simulink PV System Simulator Based on a Two-Diode Model. J. Power Electron. 2011, 11, 179–187. [Google Scholar] [CrossRef] [Green Version]
- Alrashidi, M.R.; Alhajri, M.F. Parameters Estimation of Double Diode Solar Cell Model. Eng. Technol. 2013, 7, 93–96. [Google Scholar]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive Approach to Modeling and Simulation of Photovoltaic Arrays. IEEE Trans. Power Electron 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Charging Information for Lead Acid Batteries. 2018. Available online: https://batteryuniversity.com/index.php/learn/article/charging_the_lead_acid_battery (accessed on 20 May 2018).
- Talaat, Y.; Hegazy, O.; Amin, A.; Lataire, P. Control and analysis of multiphase Interleaved DC/DC Boost Converter for photovoltaic systems. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 26 June 2014; pp. 1–5. [Google Scholar]
- Omar, N.; Monem, M.A.; Firouz, Y.; Salminen, J.; Smekens, J.; Hegazy, O.; Van Mierlo, J. Lithium iron phosphate based battery-Assessment of the aging parameters and development of cycle life model. Appl. Energy 2014, 113, 1575–1585. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A. Experimental validation of a battery dynamic model for EV applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef]
- Atiq, J.; Soori, P.K. Modelling of a grid connected solar PV system using MATLAB/Simulink. Int. J. Simul. Syst. Sci. Technol. 2017, 17, 451–457. [Google Scholar]
- Sattar, A. DC to DC Synchronous Converter Design. IXYS Corporation, 2018. Available online: https://www.ixys.com/Documents/AppNotes/IXAN0069 (accessed on 20 April 2018).
- Kolar, J.W.; Biela, J.; Waffler, S.; Friedli, T.; Badstuebner, U. Performance trends and limitations of power electronic systems. In Proceedings of the 6th International Conference on Integrated Power Electronics Systems, Nuremberg, Germany, 16–18 March 2010. [Google Scholar]
- Kim, H.; Jung, Y.C.; Lee, S.W.; Lee, T.W.; Won, C.Y. Power loss analysis of interleaved soft switching boost converter for single-phase PV-PCS. J. Power Electron. 2010, 10, 335–341. [Google Scholar] [CrossRef]
- Meng, Z.; Wang, Y.; Yang, L.; Li, W. Analysis of power loss and improved simulation method of a high frequency dual-buck full-bridge inverter. Energies 2017, 10, 311. [Google Scholar] [CrossRef]
- Tran, D.; Chakraborty, S.; Lan, Y.; Van Mierlo, J.; Hegazy, O. Optimized Multiport DC/DC Converter for Vehicle Drivetrains: Topology and Design Optimization. Appl. Sci. 2018, 8, 1351. [Google Scholar] [CrossRef]
- Lakkas, G. MOSFET power losses and how they affect power-supply efficiency. Analog Appl. 2016, 10, 22–26. [Google Scholar]
- Depew, J.; Mosfet, L. AN1471, Efficiency Analysis of a Synchronous Buck Converter using Microsoft Office Excel-Based Loss Calculator. In Appl. Note; Microchip Technology Inc.: Chandler, AZ, USA, 2012; pp. 1–14. [Google Scholar]
- Hossain, M.S.; Chowdhury, S.R.; Das, N.G.; Sharifuzzaman, S.M.; Sultana, A. Integration of GIS and multicriteria decision analysis for urban aquaculture development in Bangladesh. Landsc. Urban Plan. 2009, 90, 119–133. [Google Scholar] [CrossRef]
- Shamsuzzaman, M.M.; Islam, M.M.; Tania, N.J.; Abdullah Al-Mamun, M.; Barman, P.P.; Xu, X. Fisheries resources of Bangladesh: Present status and future direction. Aquac. Fish. 2017, 2, 145–156. [Google Scholar] [CrossRef]
- Francis, W.K.; Shanifa, B.S.; Mathew, P.J. MATLAB/Simulink PV Module Model of P & O and DC Link CDC MPPT Algorithms with Labview Real Time Monitoring and Control Over P & O Technique. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 5, 92–101. [Google Scholar]
- Rezk, H.; Eltamaly, A.M. A comprehensive comparison of different MPPT techniques for photovoltaic systems. Sol. Energy 2015, 112, 1–11. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. A Comparative Study on Maximum Power Point Tracking Techniques for Photovoltaic Power Systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Chakraborty, S.; Ullah, S.M.S.; Hasan, M.M.; Razzak, M.A. Feasibility study of solar power system in fishing trawlers in Chittagong region of the Bay of Bengal. In Proceedings of the IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 1294–1297. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| PMAX | 120 W |
| VMP | 18.2 |
| IMP | 6.95 |
| VOC | 21.9 V |
| ISC | 7.86 A |
| PCS | 36 (arranged as a 4 × 9 array) |
| Cell Type | polycrystalline silicon cell |
| Standard Test Conditions (STC) | 1000 W/m2, PM 1.5, 25 °C |
| Parameter | Value |
|---|---|
| Type | Lead-Acid Cell |
| Nominal Voltage | 12 V |
| Capacity | 100 Ah |
| Internal Resistance | ≈0.5 Ω |
| Fully-Charged Voltage | 14.5 V |
| Actual Meaning | Symbol | Value |
|---|---|---|
| Maximum input voltage | Vin | 24 V |
| Maximum output voltage | Vo | 16 V |
| Minimum switching frequency of the SBC | fsw | 20 kHz |
| Estimated inductor ripple current (5% of inductor current) | ∆i | 0.4 A |
| Desired output voltage ripple (2% of output voltage) | ∆Vo | 0.25 V |
| Maximum output current (Vout/R) | Iout | 7.50 A |
| No. of LED Bulbs | Place of the LED Bulbs | Use of the LED Bulbs |
|---|---|---|
| 3 | The front side of trawler cabin |
|
| 2 | At the upper portion of the cabin |
|
| 2 | Cabin room |
|
| 3 | Kitchen, toilet, and engine room |
|
| Time of Day 13:30 | Time of Day 14:00 | Time of Day 14:30 | Time of Day 15:30 | Time of Day 17:00 | |
|---|---|---|---|---|---|
| Topology and performance parameters | Irradiance 978 W/m2 | Irradiance 844.4 W/m2 | Irradiance 712.9 W/m2 | Irradiance 584.6 W/m2 | Irradiance 264.6 W/m2 |
| PV cell Vout 19.90 V | PV cell Vout 19.50 V | PV cell Vout 19.00 V | PV cell Vout 18.00 V | PV cell Vout 17.50 V | |
| PV cell Iout 4.50 A | PV cell Iout 4.30 A | PV cell Iout 4.00 A | PV cell Iout 3.80 A | PV cell Iout 1.50 A | |
| Battery SoC 10.50% | Battery SoC 10.95% | Battery SoC 11.25% | Battery SoC 11.78% | Battery SoC 12.56% | |
| Battery Out 10.25 V | Battery Out 10.40 V | Battery Out 10.50 V | Battery Out 10.65 V | Battery Out 10.85 V | |
| Proposed | 93.3 | 93.8 | 94.4 | 95.1 | 97.6 |
| Algorithm (%) | |||||
| Proposed | 66.1 | 62.1 | 56.3 | 51 | 29.9 |
| Algorithm (J) | |||||
| MPPT | 93.7 | 94.1 | 94.6 | 95.2 | 96.6 |
| (P&O) (%) | |||||
| MPPT | 59 | 55.2 | 50.2 | 44.9 | 24.2 |
| (P&O) (J) |
| Features | Sensor | Control | Speed | Stability | Circuit Type | Cost | |
|---|---|---|---|---|---|---|---|
| Techniques | |||||||
| Proposed PID Method | 1 | Simple | Medium | Stable | D | Low | |
| P&O Method [29,39] | 2 | Medium | Slow | Not Stable | A/D | Medium | |
| INC Method [9] | 2 | Medium | Slow | Not Stable | A/D | Medium | |
| Fuzzy Logic Method [40] | 2 | High | Fast | Highly Stable | D | High | |
| ANN Method [41,42] | 2 | High | Very fast | Highly Stable | D | High | |
| PV Output (V) | Battery Level (V) | Hardware | Simulation | ||
|---|---|---|---|---|---|
| PWM (%) | Buck (V) | PWM (%) | Buck (%) | ||
| 25 | 13.3 | 64 | 15.5 | 60.5 | 15.0 |
| 13 | 61 | 15.2 | 59.2 | 14.8 | |
| 12.5 | 59 | 14.7 | 56.4 | 14.1 | |
| 12 | 57 | 14 | 54.4 | 13.6 | |
| 11.5 | 54 | 13.5 | 52.4 | 13.1 | |
| 11 | 52 | 13 | 50.4 | 12.5 | |
| 10.6 | 50 | 12.7 | 48.4 | 12.1 | |
| Average deviation between hardware and simulation | 0.49 V | ||||
| 24 | 13.3 | 67 | 15.8 | 64.4 | 15.4 |
| 13 | 66 | 15.6 | 63.6 | 15.2 | |
| 12.5 | 64 | 15 | 60.4 | 14.5 | |
| 12 | 61 | 14.6 | 59 | 14.1 | |
| 11.5 | 59 | 14 | 56.6 | 13.6 | |
| 11 | 57 | 13.5 | 54.4 | 13.1 | |
| 10.6 | 54 | 13 | 52.8 | 12.7 | |
| Average deviation between hardware and simulation | 0.42 V | ||||
| 23 | 13.3 | 71 | 16 | 68.8 | 15.8 |
| 13 | 70 | 15.9 | 68 | 15.6 | |
| 12.5 | 68 | 15.3 | 64.8 | 15 | |
| 12 | 66 | 14.9 | 63.2 | 14.5 | |
| 11.5 | 64 | 14.3 | 60.8 | 14 | |
| 11 | 61 | 13.8 | 59 | 13.5 | |
| 10.6 | 59 | 13.5 | 57 | 13.2 | |
| Average deviation between hardware and simulation | 0.32 V | ||||
| Time | Vin | Iin | Pin | Vo | Io | Po | η% |
|---|---|---|---|---|---|---|---|
| 6:00 | 16.50 | 0.30 | 4.95 | 0 | 0 | 0 | 0 |
| 6:30 | 17.50 | 0.80 | 14.00 | 12.20 | 0.90 | 10.98 | 78.4 |
| 7:00 | 17.50 | 0.85 | 14.88 | 12.20 | 0.95 | 11.59 | 77.9 |
| 7:30 | 17.80 | 0.90 | 16.02 | 12.30 | 1.10 | 13.53 | 84.5 |
| 8:00 | 18.00 | 1.10 | 19.80 | 12.30 | 1.30 | 15.99 | 80.8 |
| 8:30 | 18.00 | 1.50 | 27.00 | 12.30 | 1.80 | 22.14 | 82 |
| 9:00 | 18.50 | 1.50 | 27.75 | 12.30 | 1.80 | 22.14 | 79.8 |
| 9:30 | 18.50 | 1.70 | 31.45 | 12.40 | 2.00 | 24.80 | 78.9 |
| 10:00 | 18.50 | 2.00 | 37.00 | 12.40 | 2.40 | 29.76 | 80.4 |
| 10:30 | 18.50 | 2.50 | 46.25 | 12.45 | 3.00 | 37.35 | 80.8 |
| 11:00 | 19.00 | 3.00 | 57.00 | 12.50 | 3.70 | 46.25 | 81.1 |
| 11:30 | 19.00 | 3.50 | 66.50 | 12.55 | 4.40 | 53.97 | 81.2 |
| 12:00 | 19.50 | 4.00 | 78.00 | 12.60 | 5.50 | 69.30 | 88.8 |
| 12:30 | 19.79 | 4.50 | 89.06 | 12.65 | 6.30 | 79.70 | 89.5 |
| 13:00 | 19.90 | 4.50 | 89.55 | 12.70 | 6.50 | 82.55 | 92.2 |
| 13:30 | 19.90 | 4.50 | 89.55 | 12.75 | 6.40 | 81.60 | 91.1 |
| 14:00 | 19.50 | 4.30 | 83.85 | 12.90 | 5.60 | 72.24 | 86.2 |
| 14:30 | 19.00 | 4.00 | 76.00 | 13.00 | 5.00 | 65.00 | 85.5 |
| 15:00 | 18.85 | 4.00 | 75.40 | 13.10 | 4.80 | 62.88 | 83.4 |
| 15:30 | 18.00 | 3.80 | 68.40 | 13.15 | 4.30 | 56.55 | 82.7 |
| 16:00 | 17.75 | 3.50 | 62.13 | 13.25 | 3.90 | 51.68 | 83.2 |
| 16:30 | 17.70 | 3.30 | 58.41 | 13.30 | 3.60 | 47.88 | 82 |
| 17:00 | 17.50 | 1.50 | 26.25 | 13.35 | 1.60 | 21.36 | 81.4 |
| 17:30 | 17.50 | 1.00 | 17.50 | 13.40 | 1.00 | 13.40 | 76.6 |
| 18:00 | 17.00 | 0.50 | 8.50 | 0 | 0 | 0 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chakraborty, S.; Hasan, M.M.; Worighi, I.; Hegazy, O.; Razzak, M.A. Performance Evaluation of a PID-Controlled Synchronous Buck Converter Based Battery Charging Controller for Solar-Powered Lighting System in a Fishing Trawler. Energies 2018, 11, 2722. https://doi.org/10.3390/en11102722
Chakraborty S, Hasan MM, Worighi I, Hegazy O, Razzak MA. Performance Evaluation of a PID-Controlled Synchronous Buck Converter Based Battery Charging Controller for Solar-Powered Lighting System in a Fishing Trawler. Energies. 2018; 11(10):2722. https://doi.org/10.3390/en11102722
Chicago/Turabian StyleChakraborty, Sajib, Mohammed Mahedi Hasan, Imane Worighi, Omar Hegazy, and M. Abdur Razzak. 2018. "Performance Evaluation of a PID-Controlled Synchronous Buck Converter Based Battery Charging Controller for Solar-Powered Lighting System in a Fishing Trawler" Energies 11, no. 10: 2722. https://doi.org/10.3390/en11102722