1. Introduction
With the continuous development of power system, the operation of the system has been more complex than ever. Due to some occasional and inevitable factors, blackouts have become a serious threat to the power system [
1,
2]. Besides, the security of power system has been severely affected by uncertain factors. Therefore, the investigation on source-load coordinated restoration method considering double uncertainty plays supporting role in restoration decision, which is beneficial to ensure the stability and rapidity of power system in restoration process.
The procedure of power system restoration can be divided into three stages: black-start, reconfiguration of the network and load restoration [
3,
4]. There is no obvious sequence as three stages are interleaved with each other. It is necessary to restore part of the important loads to balance the output of the restarted units during the black-start stage, which ensures the stable operation of the restarted units and achieves the minimum steady output as soon as possible after connecting to the grid [
5,
6].
In recent years, theoretical investigations on unit and load restoration have attracted researchers’ interests. To maximize the generating power output, the start-up of generating units need to be optimized [
7]. Sun W. et al. applied mixed-integer linear programming (MILP) algorithm to identify the optimal start-up sequence of NBSUs [
8]. An optimal restoration approach based on the Wide Area Measurement System (WAMS) was proposed by Nourizadeh S. et al. [
9]. Gu X. et al. proposed an extended black-start restoration strategy, in view of the fact that some current black-start resources with large rated power can provide enough cranking power for more than one non-black-start unit (NBSU) simultaneously [
10]. The feasibility of selecting microgrids as black start power was analyzed by Wu Z. et al. It adopts the Dijkstra algorithm to search for the extended black start paths [
11]. Lin Z. et al. put forward a novel method using the entropy weight-based decision-making theory to evaluate and optimize the sequence of NBSUs [
12]. In terms of load restoration, a DC optimal load shed recovery with transmission switching model was proposed to increase the operating capacity, when considering load demands as continuous variables [
13]. In [
14], a mixed-integer model that was considering discrete load pickup was proposed. An optimization model was formulated to maximize load pick-up for a given substation by Qu H. et al. [
15]. Gholami A. et al. proposed a two-stage hierarchical approach to load restoration problem, which determines the optimal amount and location of load pick-up [
16]. In [
17], synchrophasors were used for the prediction of restorable size of load pick-up during the load restoration. Furthermore, a multi-objective optimization method coordinating unit restarting with load restoration was employed into the extended black-start by Wang D. et al. [
18]. The method shows that unit and load can be effectively and coordinately restored at the black-start stage.
The aforementioned methods can yield the global optimum given that sufficient modeling details and appropriate estimations are available. However, the double uncertainty, including the start-up time of generating unit and the amount of load pick-up, severely affects the performance of restoration process, which would further reduce the applicability of classical methods. Start-up time of generating unit is closely related to the characteristics of the thermal system, which can be represented as shutting down time of the unit [
19]. Besides, the amount of load pick-up is fuzzy uncertain, owing to the influence of precipitation, temperature, cold pick-up and discrete access [
20]. The distribution characteristics and membership function of uncertainty are hard to obtain, result in the limitation of fuzzy random method. Nevertheless, new ideas are provided by information gap decision theory (IGDT), which can tolerate the most uncertainty and still provides the desired performance [
21]. The IGDT model neither need distribution characteristics nor membership function of uncertainties. This method has been widely adopted in purchasing strategy in electricity market [
22] and optimal scheduling [
23].
On this basis, an optimal source-load coordinated restoration method based on IGDT is proposed in this paper, which meets the restoration requirements in the fluctuation range of double uncertainty. The time-domain restoration characteristics of black-start unit (BSU), NBSU and load are described with analysis of double uncertainty. Based on that, two objectives are considered and coupled with each other, in which the generating power output of restarted units and the weighted amount of load pick-up both are maximized. Then IGDT is adopted to convert the uncertainty multi-objective optimization model to a certain one with robustness and non-dominated genetic algorithm II (NSGA-II) is applied to solve it. More specifically, this study makes the following contributions that:
- (1)
A coupled multi-objective optimization model is built, which takes account of the double uncertainty in restoration process and realizes source-load coordinated restoration.
- (2)
IGDT is adopted to power system restoration in order to convert the uncertainty multi-objective optimization model to a certain one with robustness. The requirement of distribution characteristics and membership function of uncertainties are avoided. Moreover, the optimal solution tolerates the most uncertainty and still meets the desired requirement.
The rest of the paper is arranged as follows:
Section 2 presents the double uncertainty analysis.
Section 3 presents the proposed source-load coordinated restoration model considering double uncertainty.
Section 4 presents the solution to the model based on IGDT and NSGA-II. A case study is shown in
Section 5. The conclusions are drawn in the last section.
4. The Solution to Source-Load Coordinated Restoration Model Considering Double Uncertainty
IGDT is adopted to convert uncertainty multi-objective optimization model to a certain one, which tolerates the most uncertainty and still meets the desired requirement. When compared with the fuzzy random method, IGDT neither needs distribution characteristics nor membership function of uncertainties. Finally, the specific restoration scheme can be solved by NSGA-II.
4.1. Information Gap Decision Theory
IGDT can build a robust model based on different requirements owing to the different preferences of decision-maker. The robustness is defined as the immunity of the minimum requirement satisfaction at presence of uncertain parameters [
22].
For a given uncertainty optimization model:
where
is the uncertainty set describing the uncertain input parameters.
is the decision variables set.
represents the optimization objective.
and
are quality and inequality constrains, respectively.
The uncertainty is defined as the distance between what is known and what may happen in reality [
22]. Therefore, the envelope bound model is used to represent the prior information about the uncertain parameters
, as follows [
22]:
where
is the predicted value of the uncertain parameters
;
is the uncertainty radius of
;
is the set of all values of
whose deviation from
is nowhere greater than
.
The uncertainty optimization model of Equation (18) can be converted to the certainty model based on the predicted value of the uncertain parameters
as follows:
By solving Equation (20), the basic value of objective function is
. However, it is obvious that the optimal solution of Equation (20) is not reliable while the value of
may be different from the predicted value
. In order to guarantee the optimization effect, decision maker sets a minimum requirement
as not surpassing a predefined limit.
where
is a deviation factor, which is the degree of deviation between minimum requirement and the optimal solution of the certainty model. The more
is, the bigger value of uncertainty radius of
can be tolerated.
Based on these, the uncertainty optimization model of Equation (18) can be finally converted to solve the maximum value of uncertainty radius of
when the minimum requirement is always satisfied. The robust model can be expressed as:
The decision scheme of Equation (22) can tolerate the maximum value of uncertainty radius of and meet the minimum requirement. Owing to the uncertainty set in the model has been replaced by predicted value , the original objective function and constraints need to be modified to correspond with the actual requirements.
4.2. Source-Load Coordinated Restoration Model Based on IGDT
The uncertainty optimization model and envelope bound model of double uncertainty have been established above. Therefore, the maximum generating power output
and the weighted amount of load pick-up
are calculated by Equations (8) and (9), based on the predicted value
and
. Dispatcher set
and
as the minimum requirements of generating output and the amount of load pick-up, respectively.
According to the idea of IGDT, two objective functions are converted to constraints in a new robust model, as follows:
The generating power output is minimal when the output of each NBSU is the minimum. Therefore, Equation (24) should be modified as:
The weighted amount of load pick-up is minimal when the amount of load restored in each feeder is the minimum. Therefore, Equation (25) should be modified as:
Besides, the constraints also need to be modified.
Similarly, Equation (11) should be modified as the cranking power constraint to NBSU
j when the output of each NBSU is the minimum and the amount of load that is restored in each feeder is the maximum.
Equation (13) should be modified as maximum power constraint to load pick-up at one time when the amount of load restored in each feeder is the maximum.
Equations (12) and (14)–(17) do not need further modification, owing to no relationship with double uncertainty. In summary, source-load coordinated restoration model based on IGDT can be expressed as:
Source-load coordinated restoration scheme calculated by this model is robust to double uncertainty. More specifically, the restoration scheme can guarantee that the generating power output and the amount of load pick-up are no less than and when the length of cranking time fluctuates within and the amount of load pick-up fluctuates within .
4.3. The Solution to Source-Load Coordinated Restoration Model Based on IGDT
NSGA-II which is one of the most effective and efficient algorithms for solving multi-objective problems is applied to solve the certain model with robustness [
25]. Its main characteristics are the following:
- (1)
Two fitness functions, given by and
- (2)
Integer codification: each individual is described by the number of
variables that are describing the time when NBSUs start to be cranked and loads are restored. Although time is not continuous and integer, Haffner S built conversion that can transform the codified variables back to the original variables [
26], as follows:
where
is original variable,
and
are upper and lower values of
.
is integer variable. This paper set 1 min as
.
- (3)
Use of non-dominated sorting and crowding distance [
27].
Based on NSGA-II algorithm, the specific solving progress shown in
Figure 4 is as follows:
- (1)
Input basic system data.
- (2)
Set up the deviation factors and , basic parameters of NSGA-II including number of individuals in the population , maximum number of generation , crossover probability , mutation probability .
- (3)
Generate individuals randomly and among them select with distinct characteristics and constraints satisfaction as parent population .
- (4)
Create offspring population from by using the tournament selection, crossover and mutation operators.
- (5)
Combine and to create intermediate population . Check constraint conditions of individuals and punish them by subtracting a large number on the fitness values and both.
- (6)
Perform a non-dominated sorting and crowding distance calculation to and select the first individuals as new parent population .
- (7)
Check whether the result has reached the maximum number of iterations. If not, turn to (4), else turn to (8).
- (8)
Output the Pareto-optimal front.
5. Case Study
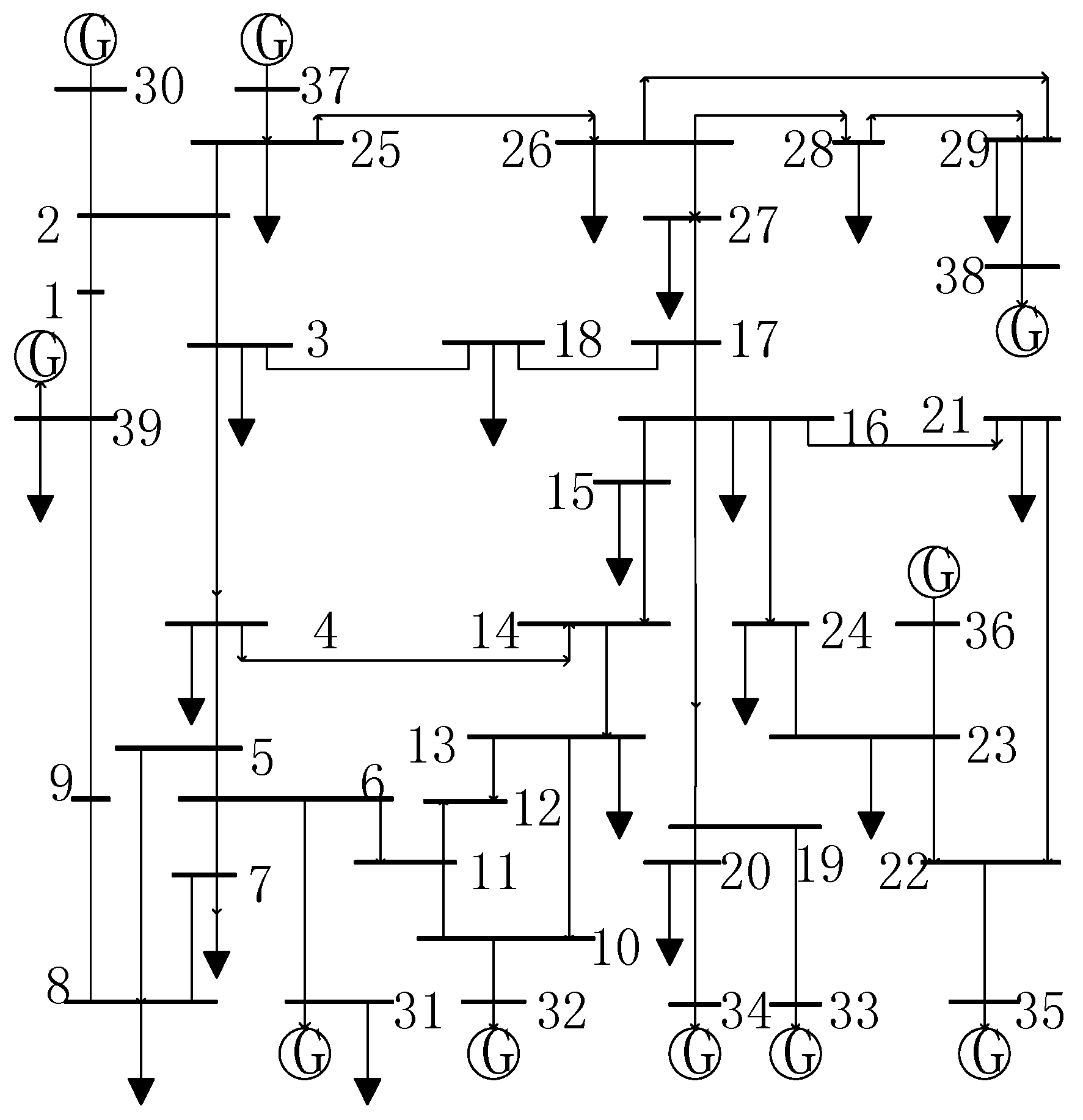
The IEEE 39-bus shown in
Figure 5 is used as a case study to verify the effectiveness of the proposed method. The optimization program was developed with the programming tool of MATLAB. Suppose that the unit at bus 33 is used as the BSU, with rated power 600 MW,
,
,
, and it is successfully restarted at the instant 0 h as the beginning time of the system restoration. The rest buses are NBSUs and loads to be restored. All of the units are subjected to a maximum critical hot start time of 1.5 h. The numbers and parameters of the units are assumed as that in
Table 1. The parameters of the loads are assumed as that in
Table 2. The feeder of load is represented as X(y), in which X is the node number and y is the feeder number. The power factors for all the loads are set to 0.8.
The parameters of NSGA-II are set as follows: the number of individuals in the population is 200, maximum number of generation is 20, crossover probability is 0.8 and the mutation probability is 0.1. Besides, . The entire restoration time for system is 2 h. The charging time for each transmission line is 2 min.
5.1. Result of Source-Load Coordinated Restoation
Firstly, the maximum generating power output
and the weighted amount of load pick-up
are calculated by Equations (8) and (9) based on the predicted value
and
. The unique solution can be obtained, in which the generating power output is 797.25 MW, the weighted amount of load pick-up is 343.23. The units and loads coordinately restored from 0 min to 85 min. After 85 min, only loads are restored further. The source-load coordinated restoration scheme without considering double uncertainty is shown in
Table 3. The interval between two units begin to restart is set as a time-step.
Then, double uncertainty is considered by setting the deviation factors
and
to determine minimum requirements
and
. For example,
is assumed as 0.03 and
is assumed as 0.2. Through solving the multi-objective optimization model that is built in this paper, the Pareto-optimal front can be obtained, as shown in
Figure 6.
The bigger values of uncertainty radius
and
are, the more robust restoration process is. In order to achieve the balance between
and
, the midpoint of Pareto-optimal (0.24, 0.13) is selected, the corresponding source-load coordinated restoration scheme is shown in
Table 4.
The amount of load pick-up is 257.27 MW to balance the active power in system, accounting for eight percent of the generating output when the system is in normal operation.
5.2. Analysis of Optimization Characteristics
In order to further investigate the optimization characteristics of this method, the load restoration and unit restoration are optimized with the consideration of uncertainty separately. The generating power output and the weighted amount of load pick-up are compared under different deviation factors.
Firstly, the optimization characteristic of unit restoration is investigated.
is assumed as 0,
is changed to determine the minimal requirement of generating power output. The midpoint of Pareto-optimal is selected to analyze. The values of uncertainty radius
and corresponding unit restoration scheme are shown in
Table 5. It can be seen that the generating power output is decreasing with the increase of the deviation factor
.
Then, the optimization characteristic of load restoration is investigated similarly.
is assumed as 0,
is changed to determine the minimal requirement of weighted amount of load pick-up. The first time-step is taken as an example. The values of uncertainty radius
and corresponding load restoration scheme are shown in
Table 6.
It can be seen that the load restoration schemes can be obtained through the optimization model that is proposed under different uncertainty radius
. The dispatcher can look up the table to select the appropriate load restoration scheme according to the approximate fluctuation range of load pick-up based on historical data. A comparison between load restoration scheme considering double uncertainty and that considering ideal situation is shown in
Figure 7.
It can be seen from
Figure 7 that except time-step 6 and 8, the weighted amount of load pick-up considering double uncertainty is lower than the ideal value not only in a single time-step, but also in the entire restoration process. The essence of IGDT is to sacrifice part of the load pick-up and enhance the robustness of the system restoration.
Finally, the relationship between uncertainty radius and deviation factors is analyzed.
and
are shown in
Figure 8.
The deviation factor has a positive correlation with the maximum uncertainty radius. Specifically, the smaller requirement of generating output is, the longer the start-up time of a unit can be tolerated. The smaller requirement of weighted amount of load pick-up is, the greater fluctuation of load pick-up in each feeder can be tolerated.
5.3. Comparison of Optimization Characteristics
To further verify the advantages of the proposed source-load coordinated restoration method based on IGDT, the proposed method in this paper is compared to fuzzy chance constrained programming. Assuming that the start-up time of generating unit and the amount of load pick-up are fluctuated around the predicted value in (0.8, 1.2). Double uncertainty is expressed by triangular fuzzy parameters and confidence intervals are all assumed as 0.8. The weighted amount of load pick-up in each time-step based on different methods is recorded, as shown in
Figure 9. If the constraints are not satisfied, then the weighted amount of load pick-up is 0.
The source-load coordinated restoration scheme based on fuzzy chance constrained programming is shown in
Table 7.
It can be seen that the source-load coordinated restoration scheme based on fuzzy chance constrained programming can not meet the security constraints in time-step 4. The descending value of frequency is more than 0.5 Hz, which exceeds the limit.
In summary, the source-load coordinated restoration method based on IGDT can tolerate the fluctuation of the start-up time of the generating unit and the amount of load pick-up. Although the weighted amount of load pick-up is smaller than fuzzy chance constrained programming, it is more robust in the overall restoration process.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}