1. Introduction
Transmission network control centers use a large number of applications for control and protection of transmission power system network. Wide area monitoring, protection, and control (WAMPAC) systems utilize phasor data from phasor measurement units (PMU) for power system estimation [
1], system disturbance monitoring [
2], and system observability and detection improvement [
3]. Wide spread deployment of PMU devices has enabled development of a range of advanced protection functions [
4,
5]. Dynamic analysis of different transient phenomena in the transmission network is also enabled by the availability of PMU data streams [
6].
Usage of such data streams from PMU for the development of WAMPAC systems with advanced angle instability protection functionalities is in more details elaborated in [
7]. The prerequisite for such advanced angle instability protection algorithms are PMUs installed across the important nodes in the transmission system. This way, good insights into the conditions of the transmission corridors are obtained when angle instability conditions occur [
8]. In order to have a proper detection and reaction sequence on different angle instability events, it is necessary to have an algorithm that can detect the instability and react swiftly [
9]. Information synthesis from the PMU measurements can also be used even to predict potential power swings [
10] and even further enhance the power system protection. These algorithms are to be implemented into future WAMPAC systems and will give good observability and protection for transmission power system in general and for each line equipped with PMU devices individually [
11].
The suggested algorithm that is described in this paper completely relies on synchronized phasor data stream from PMU devices and extends the research done in [
12]. Modern PMU devices [
13] and phasor data concentrators (PDC) normally operate with sampling time equal to one electricity sine period (20 milliseconds), which can enable all actions of the advanced protection algorithms, both in detection and operation phases, to be completed fortifying the transition towards smart transmission grid concepts [
14,
15].
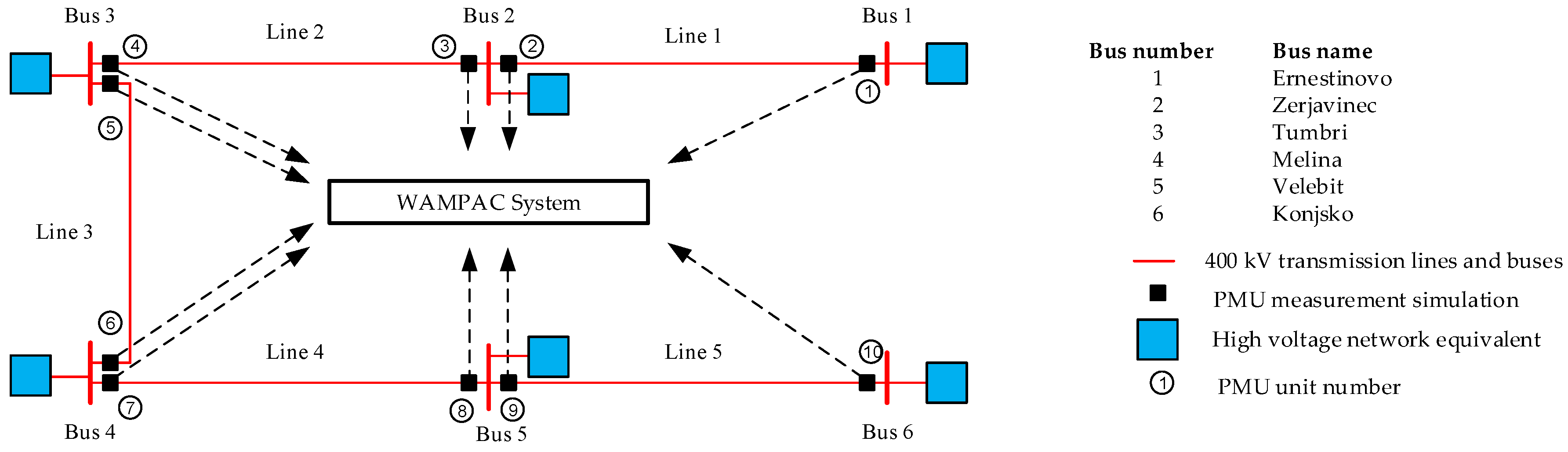
Proposed algorithm is developed in Matlab simulation environment and tested on the model that represents a real high voltage 400 kV transmission network with corresponding protection schemes models. The model uses adequate system equivalents, which substitute the neighboring transmission network systems on all interconnection buses used in model.
The paper presents results of the extensive simulations and analyses done with the focus on out-of-step conditions in transmission network early detection and warning issuing. Presented results provide contribution in the field of relay protection for transmission network with results presenting possible direction for further development of protection and monitoring functions in WAMPAC systems. In contrast, today, the most common technique for out-of-step protection is based on impedance measurements that are directly embedded on relay protection devices, which is sensitive to network topology. Voltage-based and swing voltage center-based methods are not commonly used because of inherent sensitivity in the setting phase [
16]. Others methods that can be implemented in the WAMPAC system protection segments, like fuzzy logic-based and neural network-based [
17] are still in the development phase and for now cannot be used in real applications in transmission network control centers like the proposed algorithm can. Therefore, the main contribution of the paper is the design and development of a centralized transmission system protection algorithm based on synchronized phasor data that is able to swiftly and react to a wide range of angle instability conditions by issuing corresponding trip commands before an out-of-step condition develops and that is suitable to be implemented in the transmission system operator control center.
The rest of the paper is organized as follows:
Section 2 describes the general features of the proposed WAMPAC system,
Section 3 describes in short lines the angle instability disturbances.
Section 4 presents the method for quick detection of angle instability, followed by the results presentations and scenario description through
Section 5 and
Section 6. Finally, the conclusion is given in the
Section 7.
3. Angle Instability Disturbances in Transmission Network
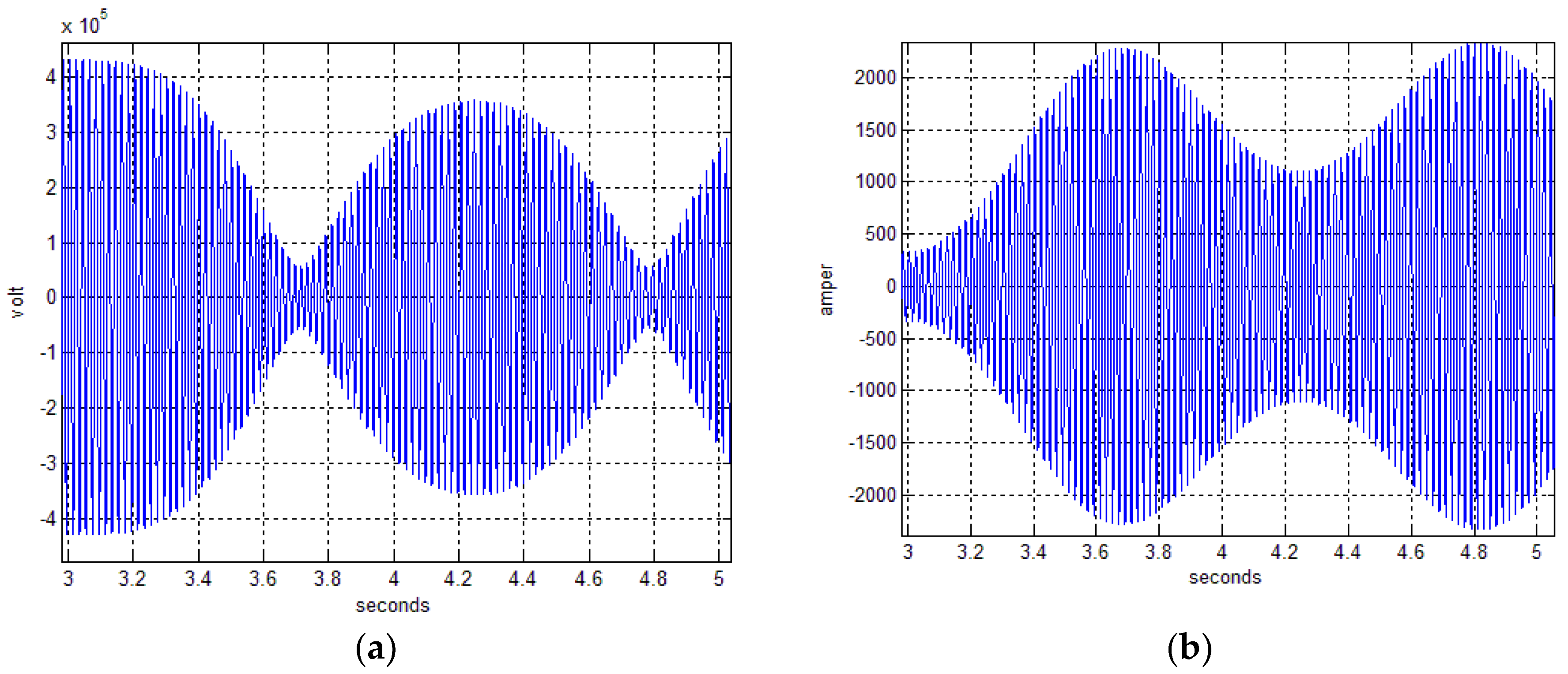
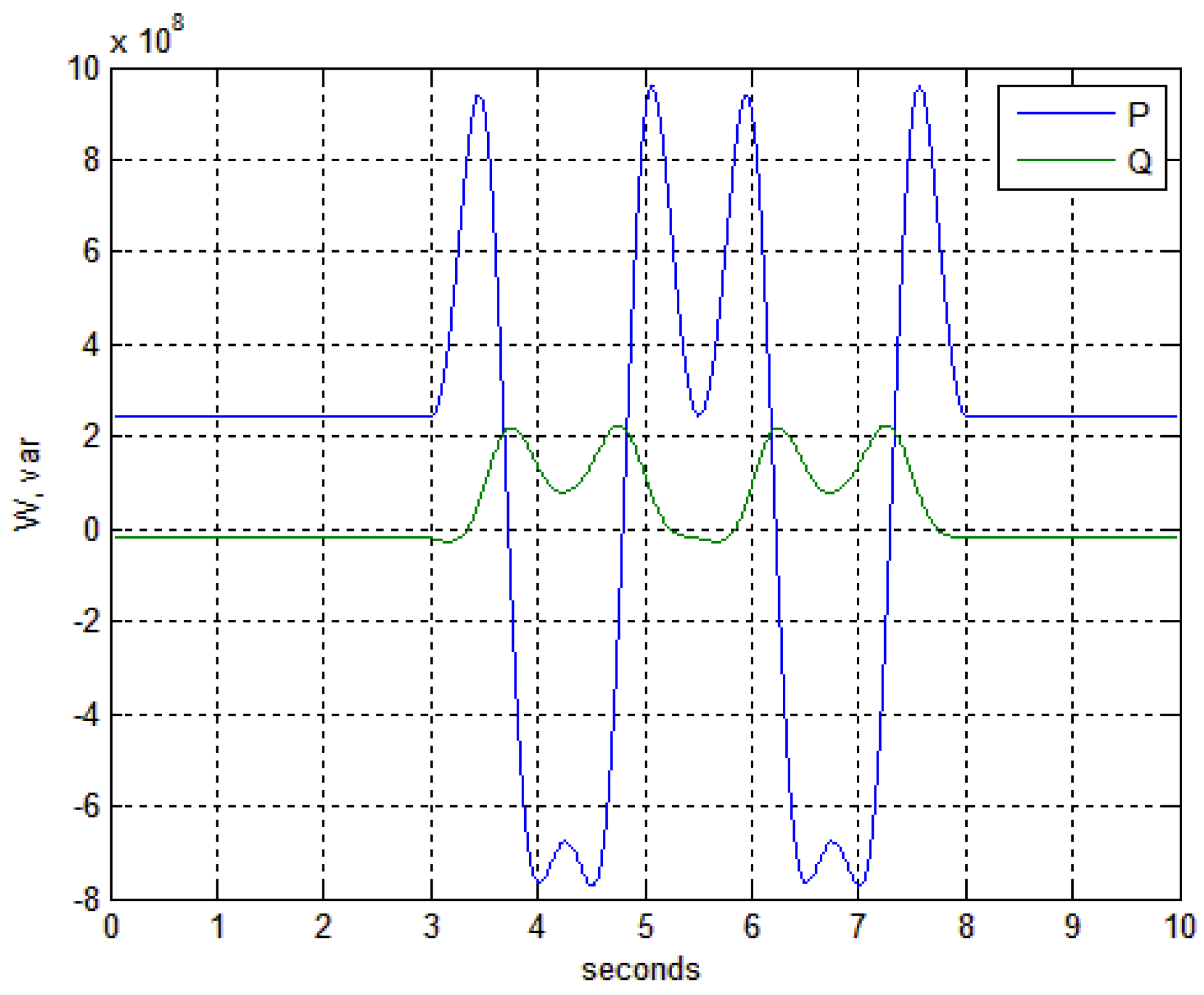
Angle instability conditions in transmission power network are undesirable events that can have severe consequences. They can seriously jeopardize normal operation in the transmission network with great risk of energy supply reduction. Out-of-step condition disturbance is an extreme manifestation of angle instability. As an example, significant oscillations in voltage (
Figure 4a) and current (
Figure 4b) values followed the occurrence of out-of-step condition (simulations done for real 400 kV Croatian transmission network model described in
Section 2.3).
Voltage magnitude decreased to almost to zero kV for a transmission line where the out-of-step condition manifested (
Figure 4a) and current values surpassed the nominal values by a large margin (
Figure 4b). In parallel, intense power oscillations are also present as can be seen from the
Figure 5, where the difference compared to stationary state (before second 3 when out-of-step condition occurs) is significantly different.
These power oscillations are far above the nominal values of transmission lines, which can cause damage to other parts in electrical power system, especially generators units that can be seriously damaged [
28]. Furthermore, circuit breakers on transmission lines can also be endangered due to increased voltage stress that is caused by even doubled voltage amplitudes during the breaker opening contact sequence [
29].
There are different methods of detection and reaction to the angle instability conditions, mainly out-of-step. As was mentioned in the introduction, this paper describes the developed algorithm that can be implemented in the TSOs control center and provides efficient detection and reaction mechanism to a wide range of angle instability conditions. The prerequisite is availability of communication infrastructure as was discussed in
Section 2.2 of this paper and availability of full-coverage of PMU measurements, which at the present time, can be achieved only in smaller systems, but in the future, even for the larger systems if the trends of PMU development persist. These prerequisite being met, the real operation implementation of the proposed algorithm can be achieved as was shown for the case of the Croatian transmission network. For comparison, majority of different angle instability protection methods are still in the study phase and not mature enough for the implementation (e.g., fuzzy logic/clustering based algorithm or resistance based algorithms) or have some inherent deficiencies (e.g., equal area based algorithms or voltage based algorithms). More detailed overview and comparison of the methods can be found in the previous work of the authors [
12].
4. Developed Method for Quick Detection of Angle Instabilities in Transmission Power Network
4.1. Trajectory Characteristic Tracking for Protection Purposes
Alike the traditional relay protection systems WAMPAC system also tracks the data quality of the measurements that flow in. As a first data evaluation step, the angle trajectory paths are being tracked. This first step distinguishes between smooth and continuous trajectory paths opposed to trajectory jump that occur under certain conditions. This preliminary data evaluation is also used as one of the protection criteria during the development of out-of-step condition detection and early warning issuing algorithm.
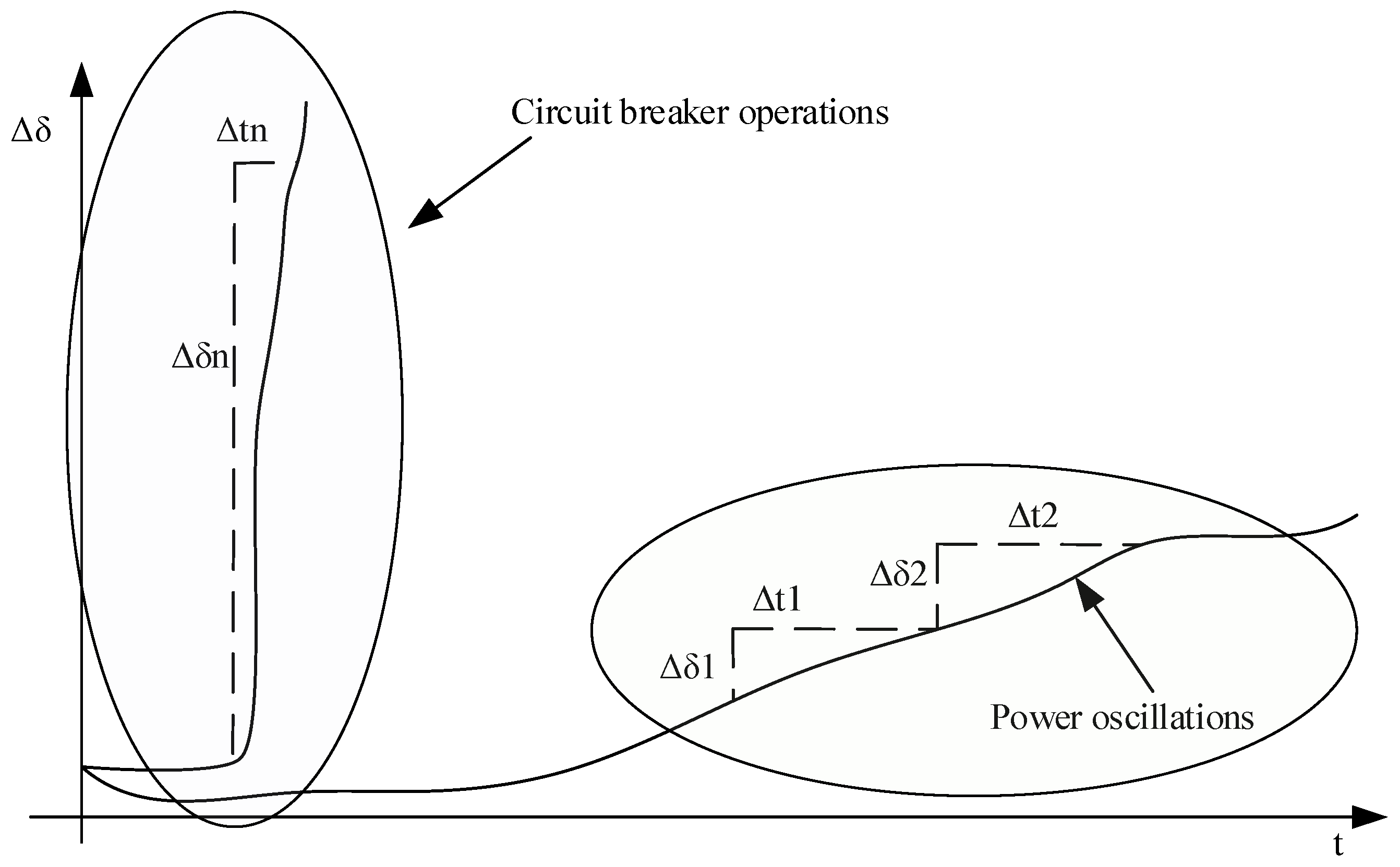
Clear differentiation between power oscillations and ramping characteristics should be assured. Usually, angle difference trajectory during oscillating conditions manifests smoothly changed electrical values (voltages, currents, and active and reactive power). Ramping changes happen when sudden actions such as short circuit or breaker switching operations occur, as shown on
Figure 6.
With the PMU sampling rate given with 50 samples per second trajectory characteristics are smooth enough and with enough details resolution to be used in WAMPAC systems. All of the trajectories during oscillations should be changed following two main principles:
Uniformity—values received from PMU devices for each sample period (20 ms) change proportionally below preset thresholds without significant steps or jumps.
Continuity—two subsequent values have consistently small differences. Trajectories have no discontinuities or disruptions in their path. Breaker switching operations are manifested as leaps from one value to other without further changes of trajectory for the duration of fault.
For any kind of switching operations, the trajectory is not smooth inherently since it has almost discrete change from one value to another. Furthermore, under some circumstances, e.g., segment of measurement data packet delayed or missed, the smoothness of the trajectory is also disrupted.
4.2. Main Detection and Protection Criteria
Voltage phase angle values obtained by the PMU unit can be deployed as new cornerstone for protection purposes. Basic values of voltage phase angle difference Δ
φ are shown by Equation (1). These values are derived from synchropahasor measurements.
This value is available on all the transmission lines that have their conditions monitored and observed by PMU units. Other two values and indicators of conditions on transmission lines that are used by the proposed algorithm are angle speed (Equation (2)) and angle acceleration (Equation (3)).
The proposed algorithm for out-of-step condition detection and early warning has to react before angle difference (Δ
φ) reaches 180°. Furthermore, it should differentiate active power oscillations in transmission network from out-of-step conditions. Reaction time, as discussed earlier in
Section 2.2, is very limited because out-of-step conditions in transmission network develop extremely fast. In each phasor cycle (20 ms time window), angle difference, angle speed, and angle acceleration are constantly monitored. Trigger values for
α and Δ
φ are used as indicators. With active power changes on transmission lines angle acceleration (
α ≠ 0) increase is observed:
For a stable active power swing angle acceleration passes through zero (zero-crossing) in the first few hundred milliseconds. Therefore, values of
α equaling zero in first
i +
n cycles, is a first indices that a stable swing will occurs during that power swing period. During that time angle speed,
ω (Equation (5)) and angle difference (Equation (6)) follow their own trajectories. Values of angle speed will have zero crossing in the first (
i +
n) +
m cycles. Angle difference Δ
φ will have zero crossing in the (
i +
n +
m) +
k cycles. Where
n,
m and
k represent limited number of cycles after consecutive zero crossing of corresponding phase angle value.
If those conditions (zero-crossings) are realized in described particular sequence, α than ω than φ, (α → ω → φ) that power swing will remain stable and will not develop in out-of-step conditions. Simulation scenarios indicate that signal for stable power swing is possible to be generated in time before angle difference reaches its maximum value.
Different values and trajectories are measured for occurrence of unstable swing that leads to out-of-step conditions. Angle difference threshold is set as the maximal allowed value for operation of transmission network in alert conditions. These values (Δφ MONITOR START) are used for setting of the synchrocheck functions on the transmission lines. Study work and calculations for relay protection purposes define that the maximal allowed voltage angle differences for synchrocheck function in the transmission network are in range from 20 to 30°. Greater values can endanger normal operation conditions and therefore for the values above 30° the synchrocheck function inside relay protection or bay computer blocks issuing the closing command for circuit breaker. In some emergency or specific situations, the override of the blockade is possible.
If the following sequence of zero-crossings accomplishes:
φ than
ω than
α, (
φ →
ω →
α—Equation (7)) for each observed cycle and the trajectory has a monotony increasing trend alarm for unstable swing will be generated before full out-of-step condition occurs (Δ
φ =180°).
Alarm will be generated few hundreds of milliseconds before out-of-step condition occurs. These values can be indirectly defined through preset values (Δφ TRIP COMMAND) that are in range from 30 to 50°, which will assure enough time to send a trip command to dedicated line circuit breaker.
4.3. Line Differential Remedial Protection Criteria
Protection systems should always assure correct detection of disturbances in the transmission network. Additional protection conditions need to be used for this demanding task. The main criteria are evaluated through additional remedial criteria in the proposed algorithm. Two remedial criteria are chosen in the algorithm described in this paper. In a case of line fault appearance, first criteria are the line current difference that can help determine the exact fault locations. This criterion relies on well proven technology of line differential current (Equation (8)), which compares the currents from sending (
I1) and receiving (
I2) ends of the transmission line.
Values of I1 and I2 are phasor values from both line ends and comparison is done for values with the same time tag. This criterion will detect every kind of line fault (short circuit, high resistance fault, earth fault, etc.).
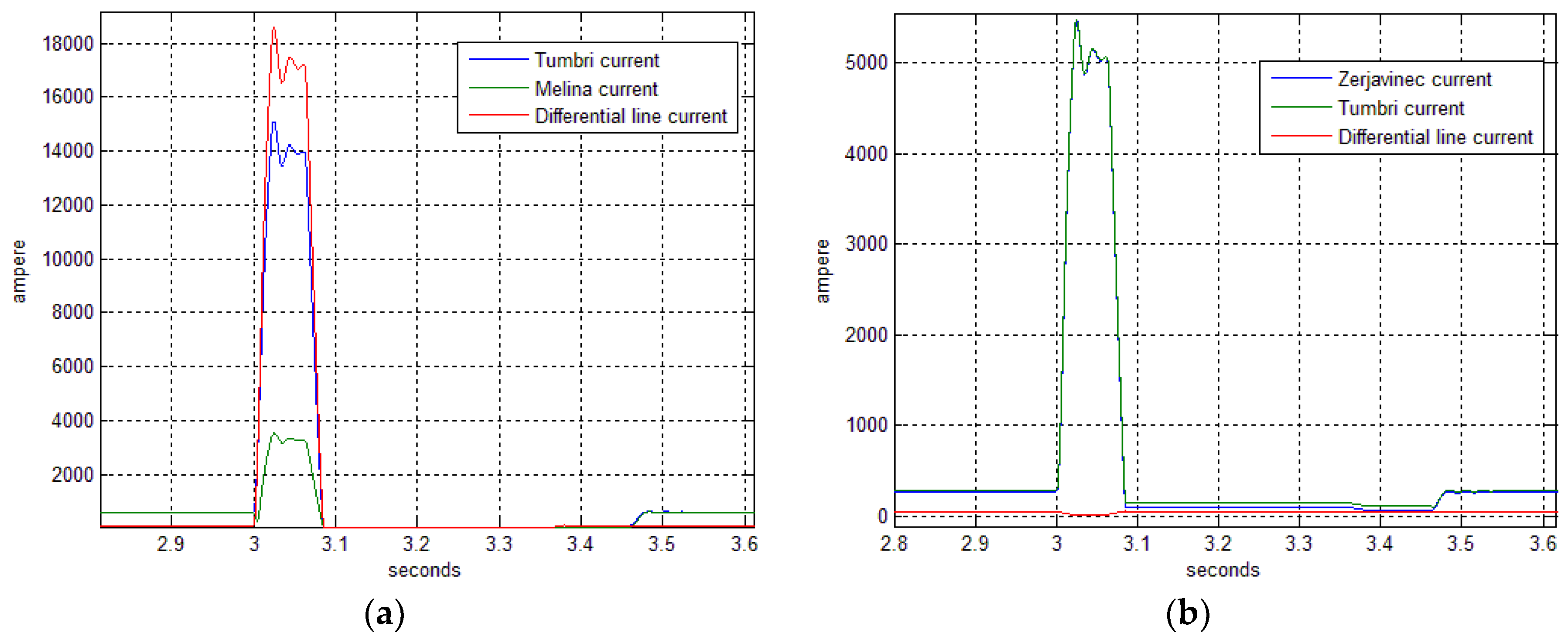
As an example, three phase short circuit line fault on Tumbri-Melina 400 kV line was simulated and line current and line differential current conditions are presented on
Figure 7a. Neighboring line, Tumbri-Zerjavinec, with its current conditions is presented on the
Figure 7b. The scale and order of magnitude difference between the current on faulted line (
Figure 7a) and current of neighboring line (
Figure 7b.) is important to notice since this difference can help to determine the fault location.
Presented graphs (
Figure 7) show a great potential of differential protection functions for the use in WAMPAC systems, since they can also be realized with synchrophasor data, and therefore combined with various other WAMPAC system functionalities.
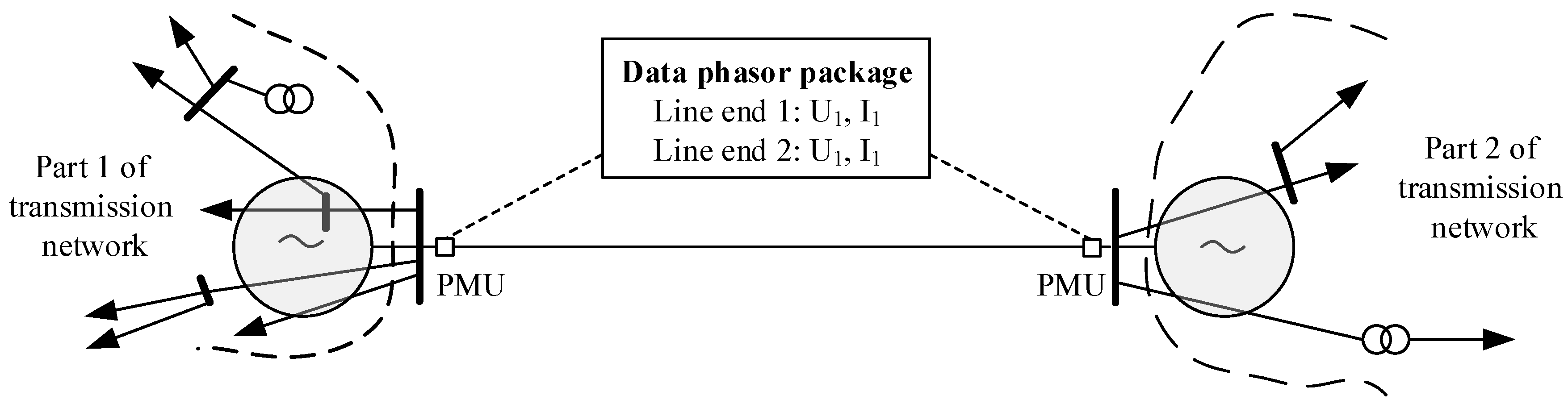
4.4. Equivalent System Inertia Remedial Protection Criteria
Each transmission lines equipped with PMU devices inside a transmission network can be presented as an isolated connections between two machine equivalents (shaded generators equivalent behind busbars on
Figure 8).
Despite the generator equivalent simplification clear picture for analyses and action is obtained regardless. From relay protection perspective, full protection and monitoring functions can be implemented. These include protection algorithms for active power oscillations, with a focus on adequate reaction during out-of-step conditions and tracing of energy oscillations on observed lines and indirectly in wider transmission area. The main goal is to detect various types of active power oscillations in transmission system in order to issue appropriate protective alarms and actions if needed.
For the development of different monitoring and protection functions in WAMAPAC system it was necessary to acquire insight to energy that transitions and oscillates during disturbances. One important condition for successful algorithm development is to use the only available synchrophasor measurements. Therefore, this energy can be expressed in various values as a function of angle momentum or equivalent system inertia. The outputs are well known equations for generator state description, which have to be adopted for transmission network and for calculations in real time. These equations include the Newton’s second law for rotating machines (Equation (9)) [
30].
where
is the total moment of inertia for turbine and generator and
is a rotor angular speed and
is rotor angle.
is the damping factor and
is the torque for turbine (
) and for generator (
). This covers a single machine case.
Rearranging and substitution Equation (9) will have the following result:
Swing equation with some simplifications can be adapted for usage as the second additional remedial criteria. Accordingly, Equation (10) is adapted for usage in order to achieve real time calculation capabilities (Equation (11)). Losses on transmission line are neglected.
Adopted angular momentum on transmission line is expressed as:
With this equitation energy changes on transmission lines are measured both during the normal operations and during disturbance conditions. This energy changes are expressed in accordance to angle change on particular line.
In similar manner transmission line equivalent inertia (
) can be expressed since it is measured the same way like angular momentum. Relations between angular momentum and inertia constant
is given by Equation (13).
Equation (13) can adopted for transmission lines and is expressed in per unit values.
Assumed that nominal power is equal to base power (
with for example
being 1000 MVA for one transmission line), and nominal angle speed
, then Equation (15) is reached.
Using Equation (15) and synchrophasor, measurement data insight into values of inertia constant in the transmission network becomes available. Values of transmission line equivalent inertia has very different trajectories and patterns for stable active power oscillations and out-of-step conditions. On this basis, second remedial criterion (first being differential current) for early recognitions of out-of-step condition was defined. As is described later in the results section, the equivalent inertia has significantly different trajectory depending if the unstable swing (out-of-step condition) developed or the angle instability remained only as stable swing.
4.5. Two Level Criteria Protection Schemes
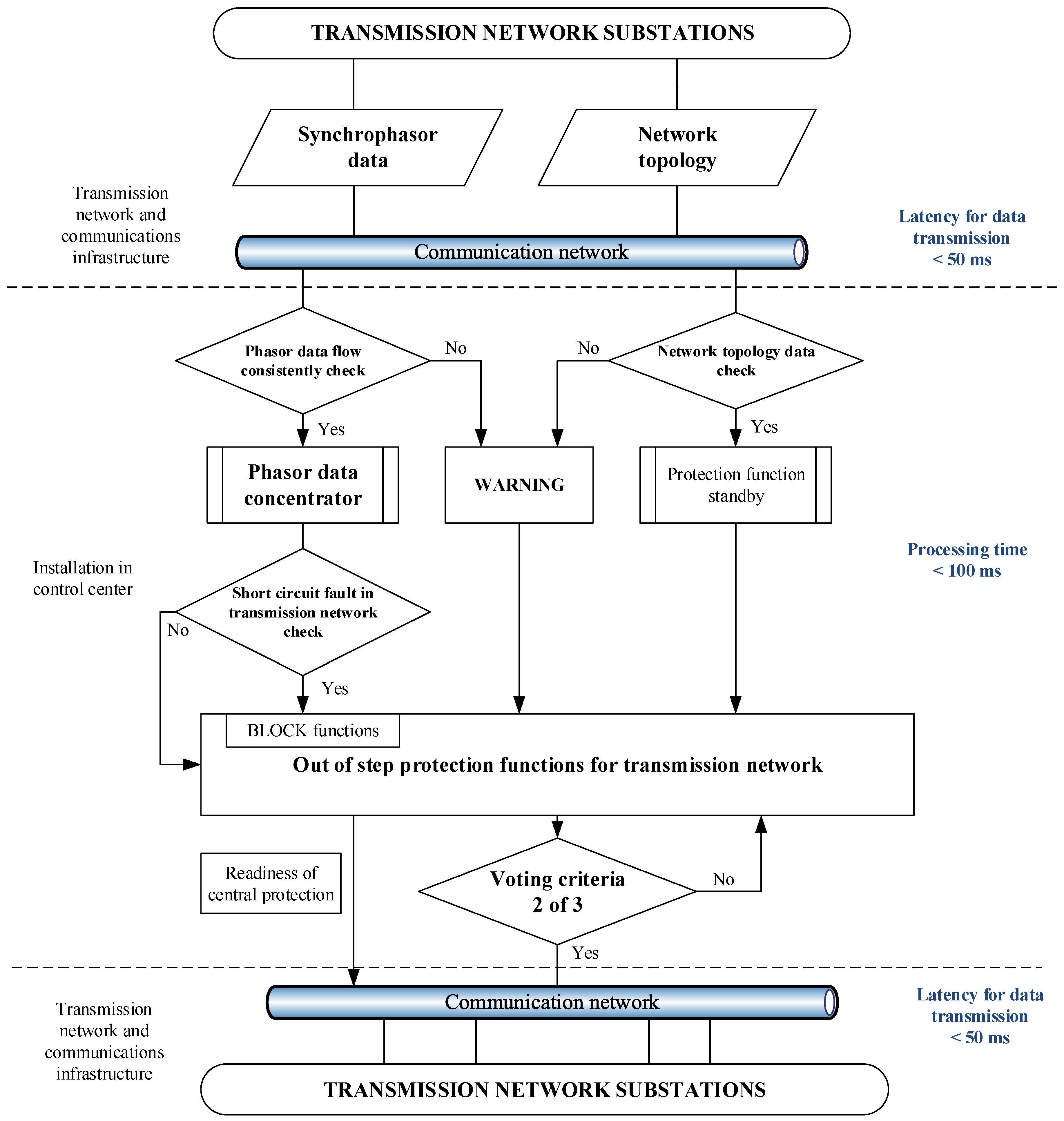
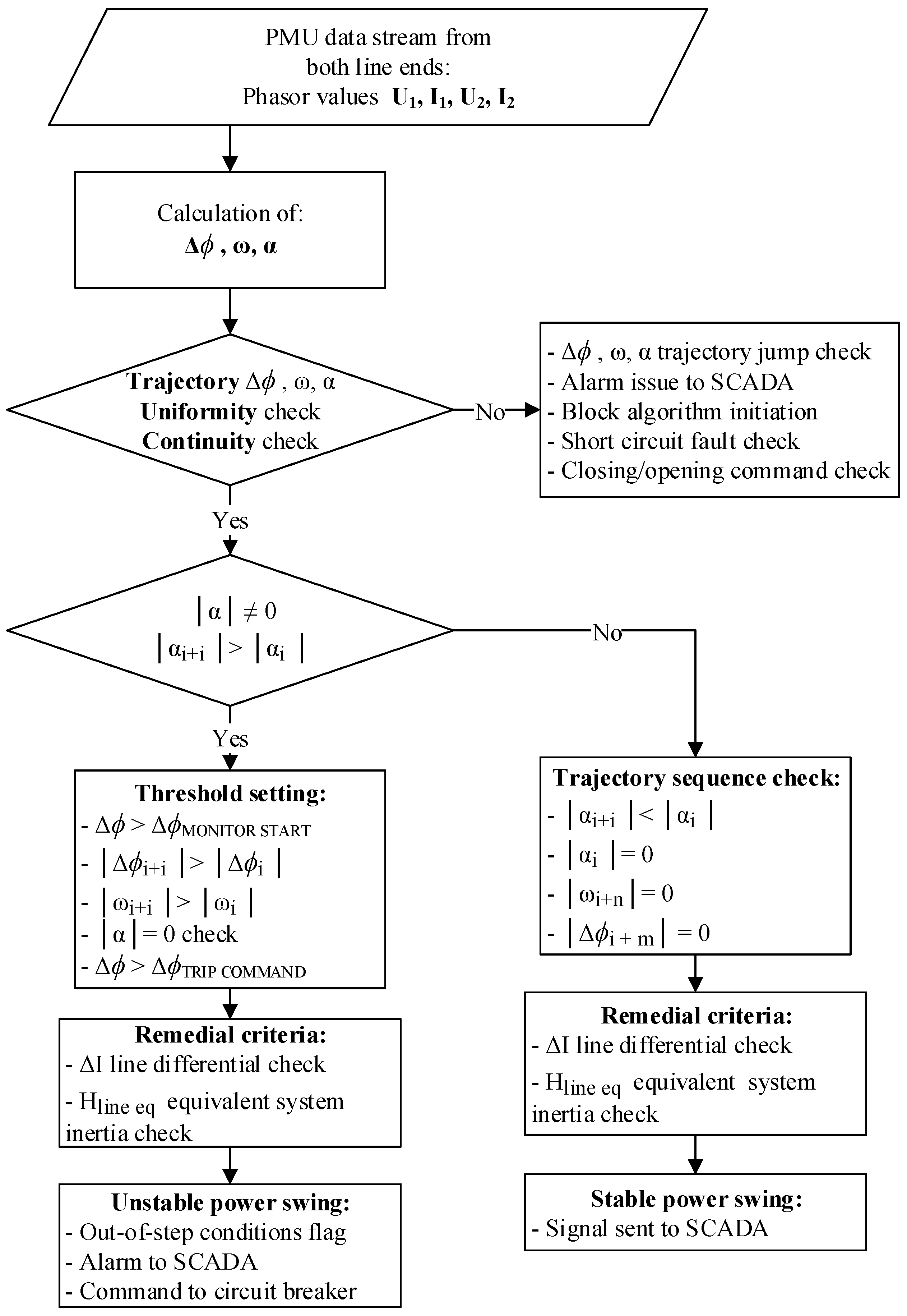
Main criteria for detecting active power oscillations and differentiation between stable and unstable power swing was designed and explained in previous section. The proposed flow chart for described algorithm design is depicted on
Figure 9 and is to be implemented into the WAMPAC system. The interconnection between SCADA and WAMPAC system is in the exchange of signals and statues from different WAMPAC system protective blocks/function. This way, the SCADA system information of the knowledge of the system status is enhanced even further.
The detection of out-of-step conditions in transmission network is a complex process in comparison to short circuit detection. Additionally, checks need to be carried out in a case of real line fault, because under those conditions, line relay protection has to be activated. This checking process runs in parallel to main criteria and it is divided into two level protection schemes (
Figure 9).
A line differential criterion provides additional confirmation of the location of the faulted line. Equivalent transmission system inertia criterion additionally differentiates between stable and unstable swing development on transmission lines. The described two level criterion enables fast reaction for protection purposes during angle instabilities disturbances.
5. Analysis of the Simulations Results and Basic Characteristics of Angle Instabilities in Transmission Power Network
Simulation model was developed in MATLAB software [
31] and afterwards ran through the extensive process of verification and validation against real operation archived data [
32,
33]. The modelled 400 kV network is a multi-machine network of the real 400 kV Croatian transmission system, as was mentioned before.
For the test of the proposed algorithm, the simulation duration was set to 10 s and oscillations were initiated in 3rd second and lasted till 8th second. Segments of the simulation results are presented in the following section. The model was designed primarily for developing protection functions for angle instability events and the priority was to achieve proper protection response.
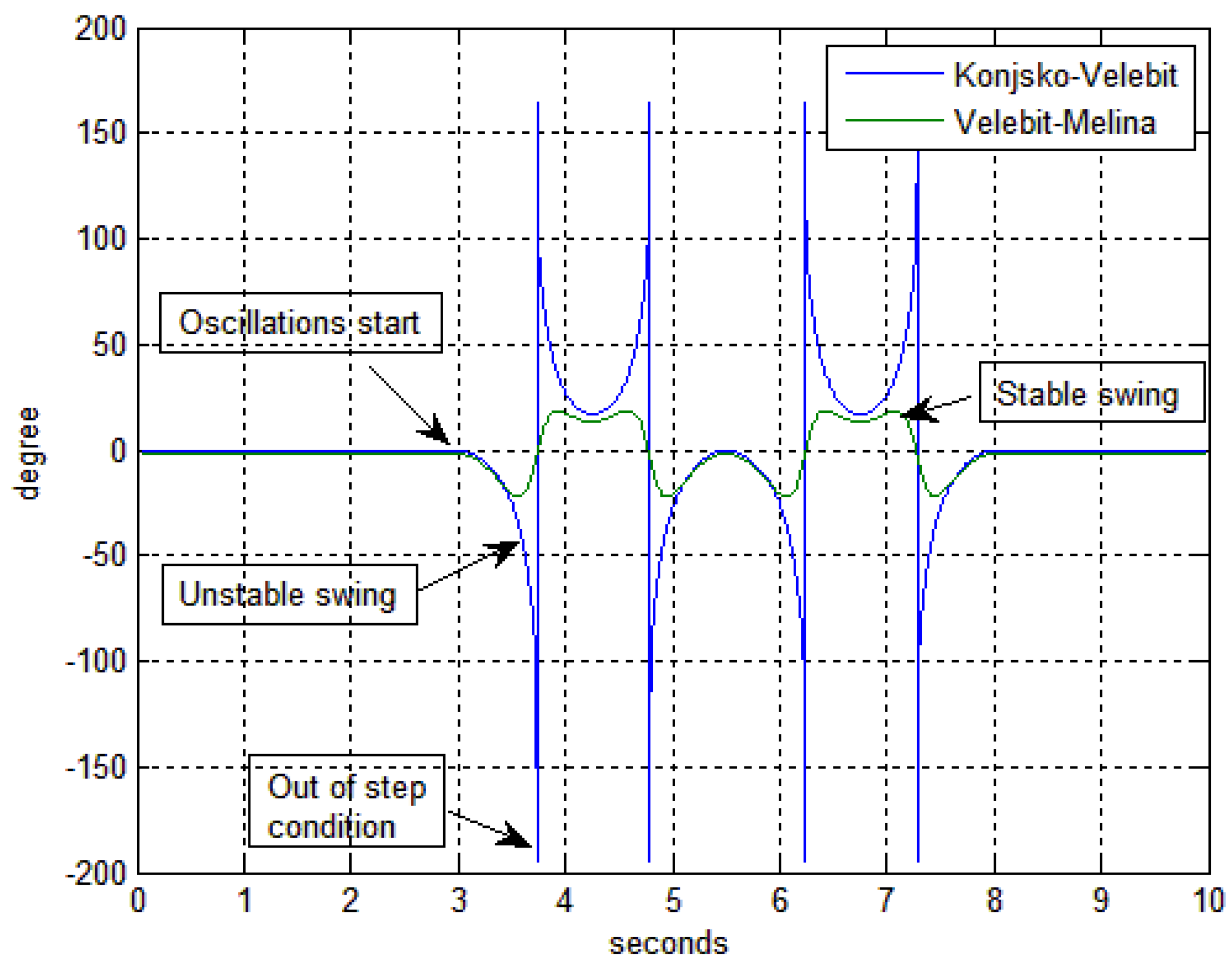
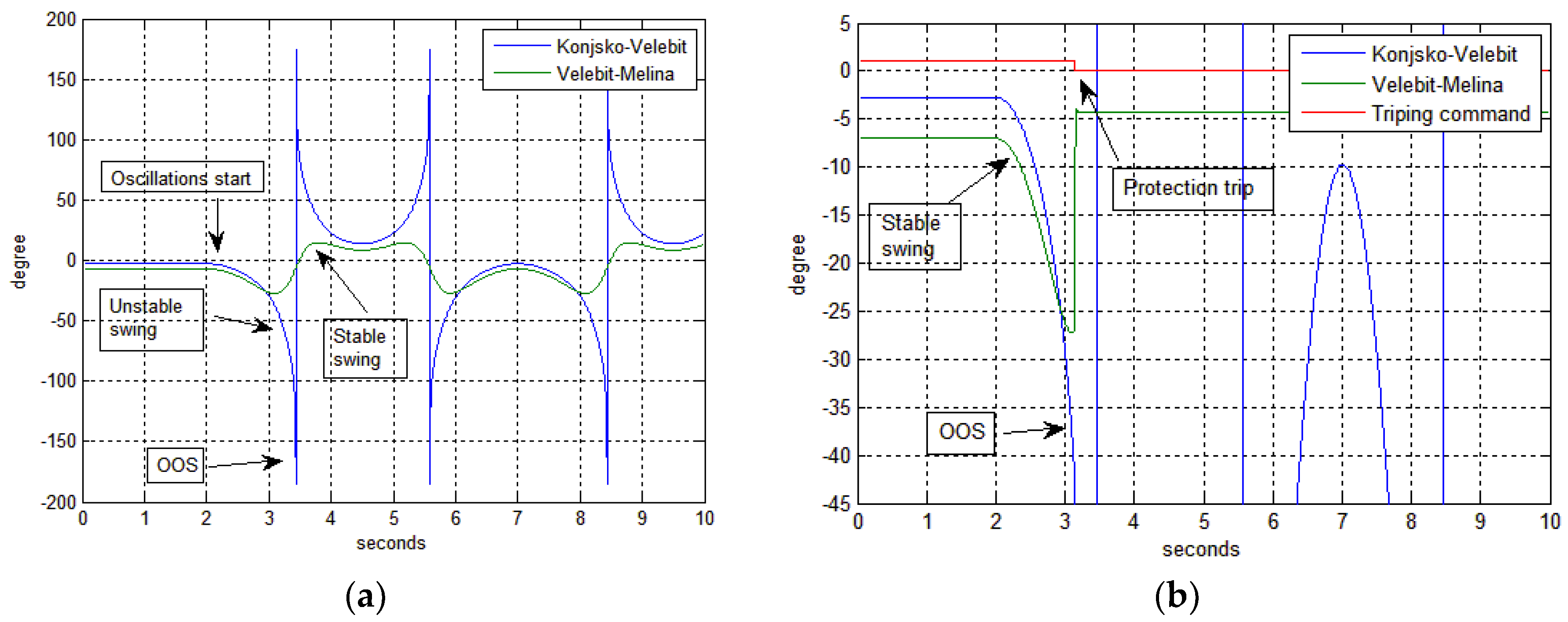
Using synchronized phasor measurement data in daily operation gives the TSO a broad range of advanced and powerful possibilities such as monitoring of angle stability, which is in the focus of this work. This means that every oscillation in transmission network will be observed and noted, thus alarm can be issued or even automated reaction can be generated. Described protection algorithm, as was mentioned before, is developed with aim to help the detection of angle instability events and provided basis for fast reaction. Simulations results for high active power oscillations on two lines are presented on figure below (
Figure 10—blue line). 400 kV transmission line Konjsko-Velebit is exposed to unstable swing, which develops to out-of-step condition. Neighboring 400 kV line Velebit-Melina, manifests only the stable power swing (
Figure 10—green line).
Angle difference, Δ
φ presents how power oscillations behave using the data of voltage angle from both sides of the transmission lines,
Figure 10. Simulated disturbances in Matlab environment follow the characteristic pattern for stable and unstable swing [
34]. The representative disturbance for out-of-step condition occurrence on the 400 kV transmission line Konjsko-Velebit was presented on the following figure (
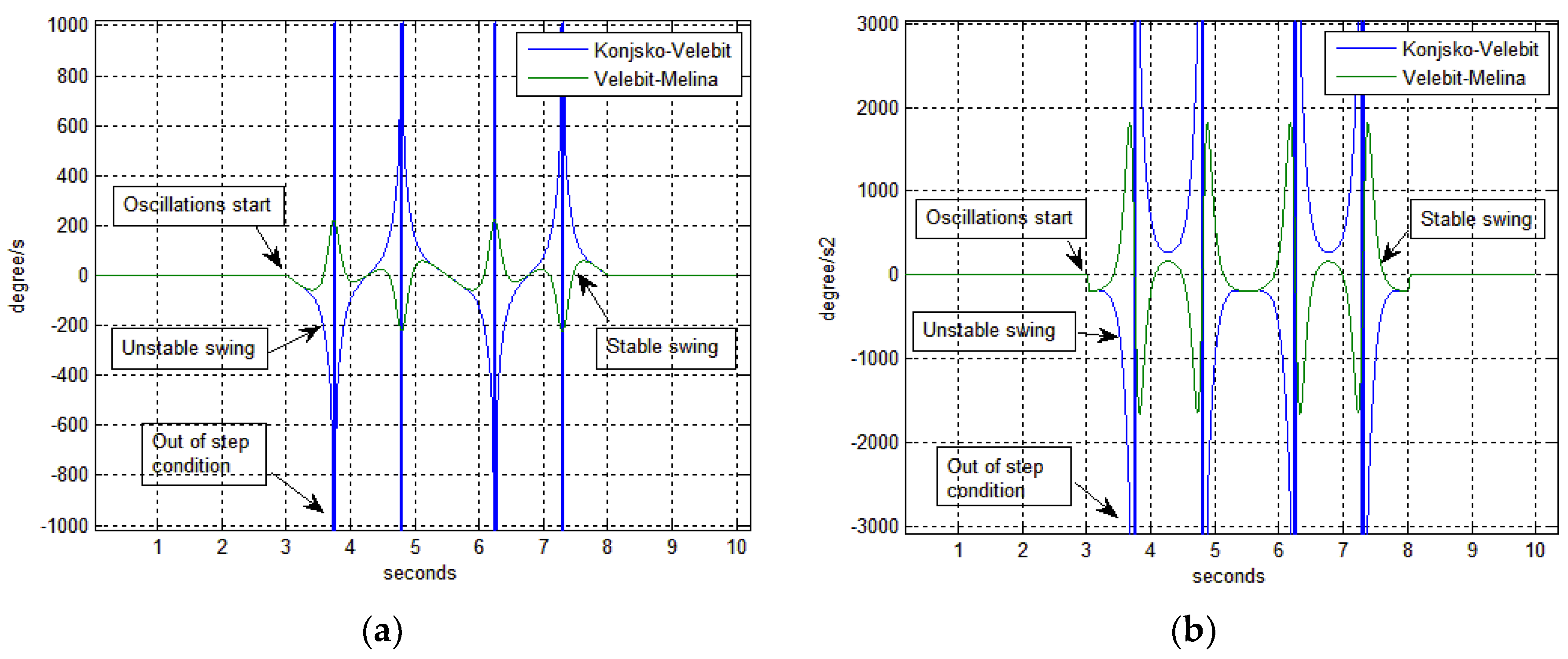
Figure 11). Neighboring 400 kV lines (e.g., Velebit-Melina) also manifested strong active power oscillations.
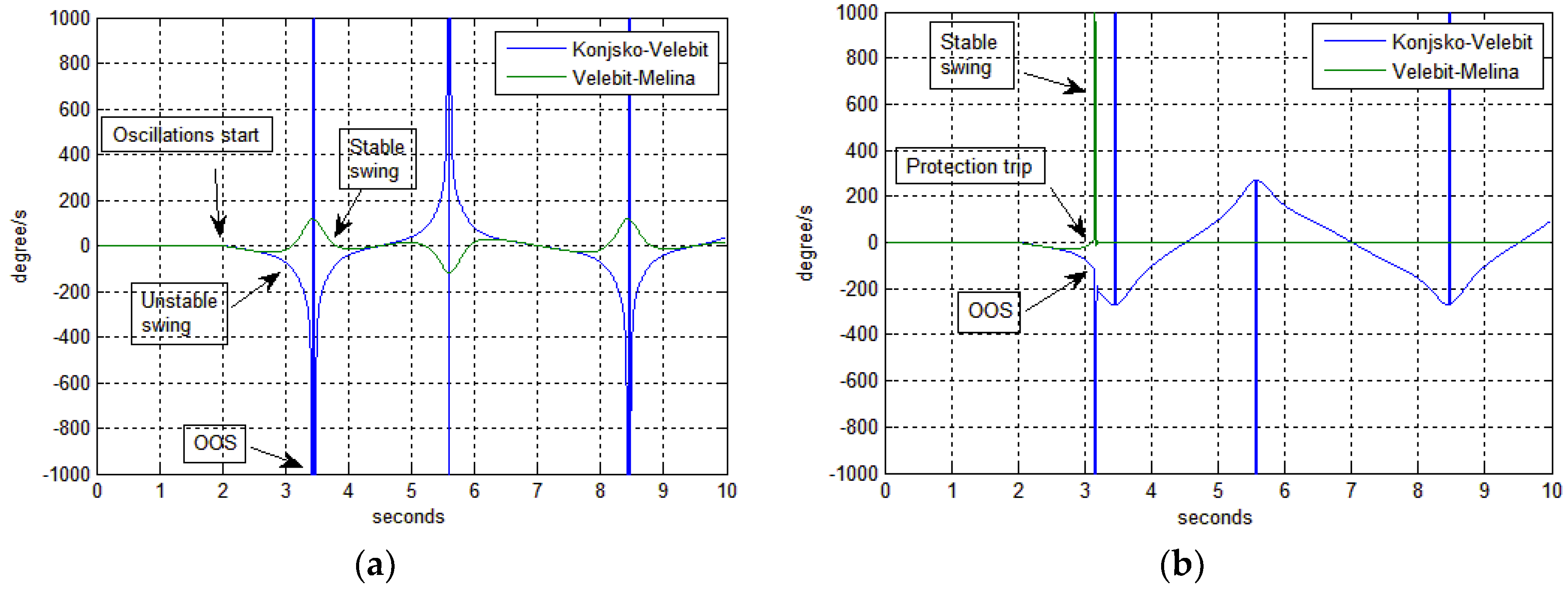
Through simulation, it was shown that besides angle difference other angle values should be traced and monitored in order to correctly detect the disturbance. Those values are angle speed (
ω) and angle acceleration (
α). Line with out-of-step condition (
Figure 11—blue line Konjsko-Velebit) has significantly higher angle speed
ω then other lines where only power swings manifests (
Figure 11—green line Velebit-Melina).
Readings from
Figure 11 return values of
ω = 16,000 degree/s (value is out of scope for selected axis range) for line with out-of-step condition and for line with only power swing value is
ω = 700 degree/s. Very similar ratio but with much bigger absolute values happened with angle acceleration
α as shown on
Figure 11. Angle acceleration
α, for out-of-step conditions maxed at
α = 900,000 degree/s
2 and the neighboring line had value of only
α = 9250 degree/s
2. Values on
Figure 11 show only a limited scope of values to present in more details most important changes of the characteristics.
After series of conducted simulations of angle instability events, it became evident that focus must be on relationship between values of angle spend
ω and angle acceleration
α. The reaction time for any action during angle instability is extremely short and is in range of hundreds of milliseconds, which means any control action must be generated and propagated to circuit breaker in that time frame. Advanced protection algorithms such as mentioned in [
35], and including in this paper proposed one, are based on the interdependent behavior of the three angle values, angle difference Δ
φ, angle speed
ω and angle acceleration
α.
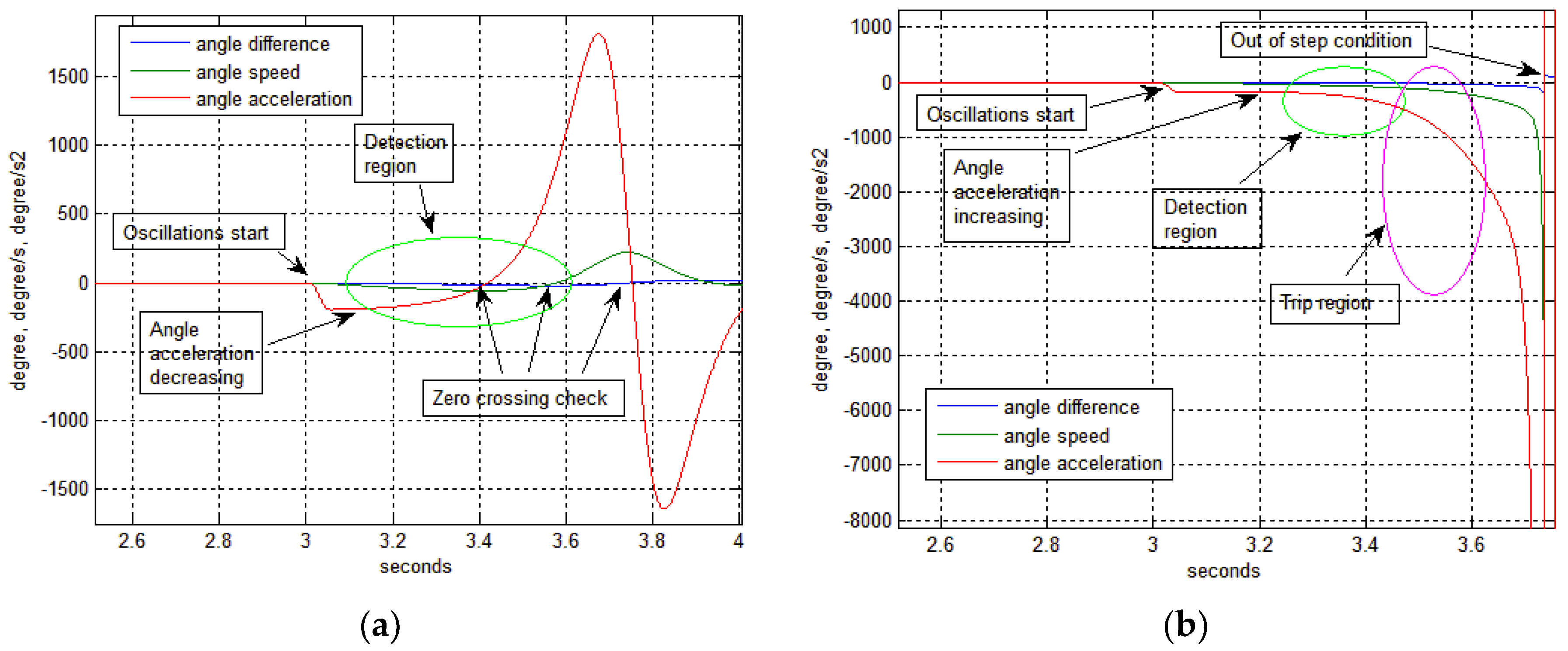
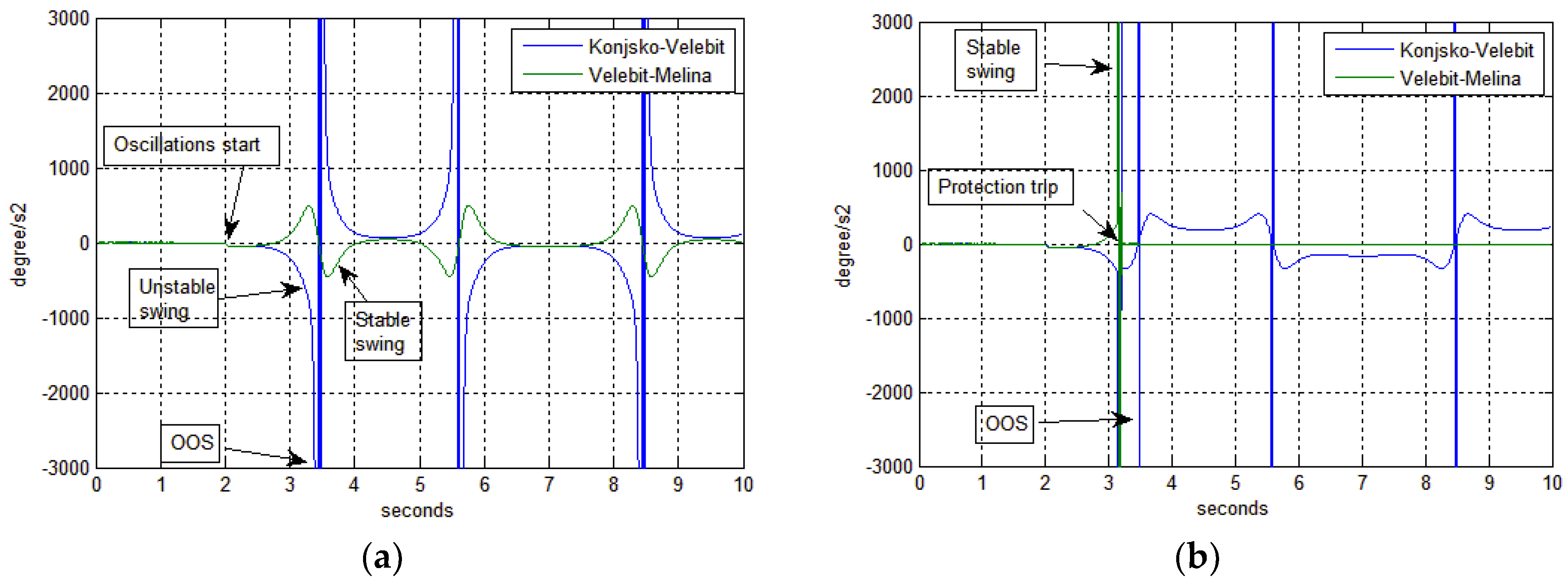
The described algorithm in this paper uses characteristic behavior that was observed through series of simulations (
Figure 12) for power swing and out-of-step condition detection and early warning issue.
Angle acceleration
α, has zero crossing at
t < 3.4 s, which is before angle difference Δ
φ (
Figure 12a). Additionally, angle speed
ω, has zero crossing at
t ~ 3.6 s which before Δ
φ crosses the
x-axis (zero-crossing at
Figure 12a). This is a characteristic footprint for power swing. Line affected with out-of-step condition has very different pattern (
Figure 12b) as compared to power swing pattern (
Figure 12a) with different patterns for all three angle values, Δ
φ,
ω, and
α. None of these values have zero crossings before reaching the 180 degrees point and all of the values continue increasing until slip finally occurs (after 3.7 s at
Figure 12b).
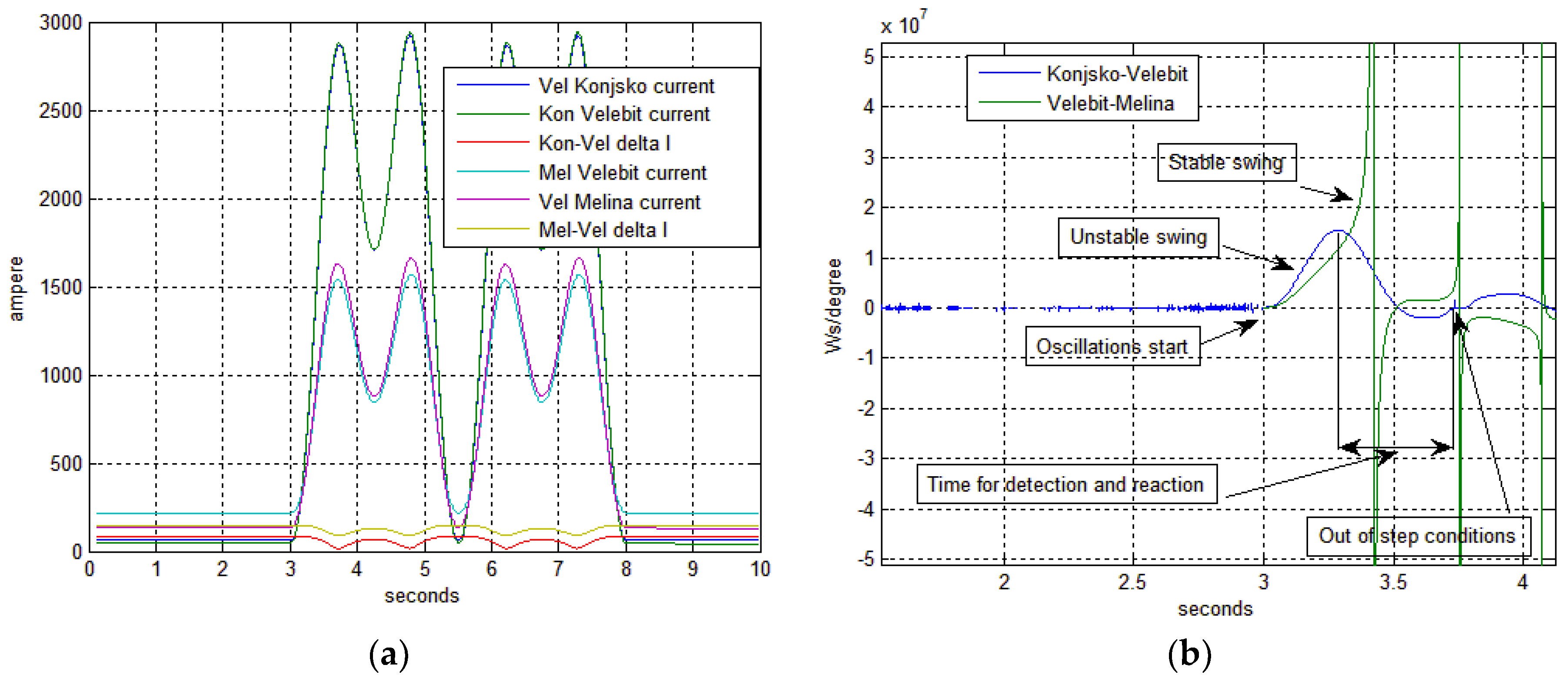
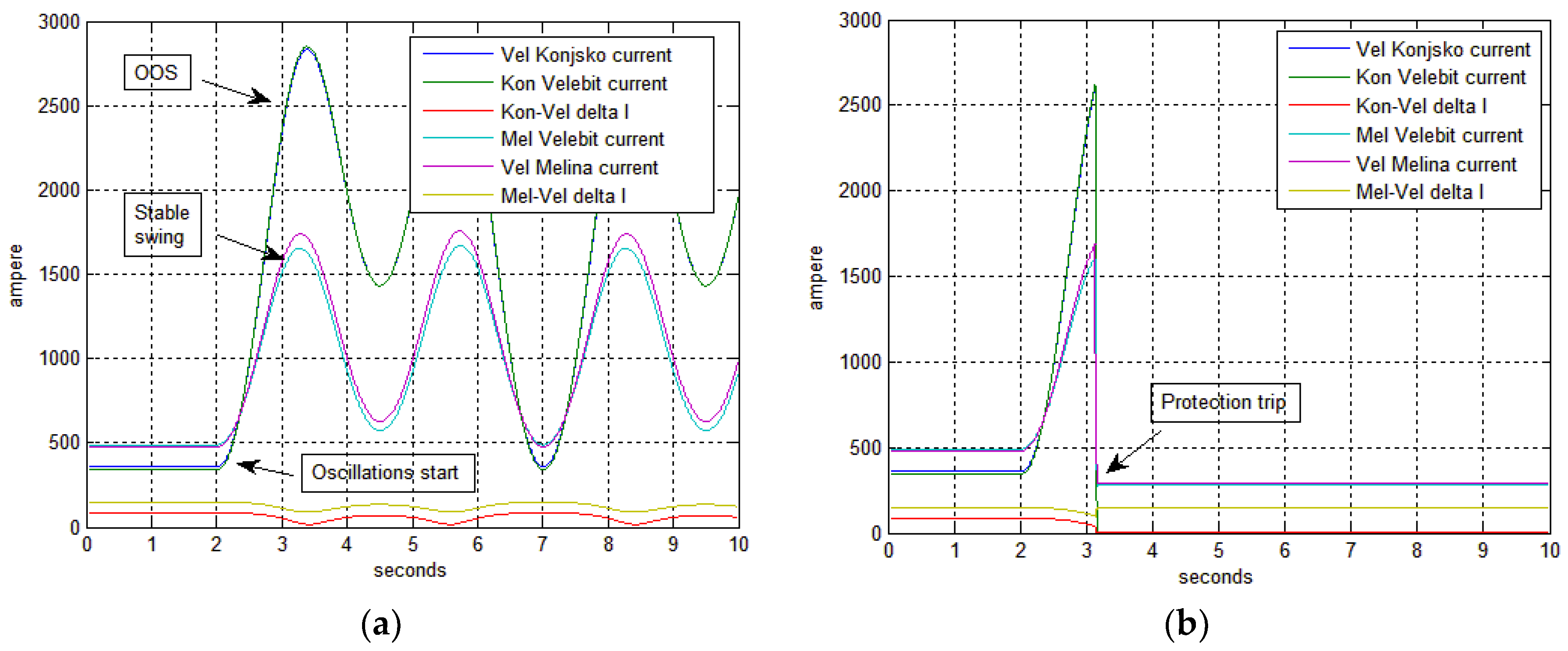
Furthermore, remedial criteria Δ
I, clearly shows only oscillations developed on both lines
Figure 13a (Velebit-Melina affected by stable swing and Konjsko-Velebit affected by unstable swing (out-of-step)). Values of Δ
I have small values that are caused by line charging current. Other remedial criteria (equivalent transmission system inertia
) for both lines also has a characteristic pattern shown on
Figure 13b. Line affected by unstable swing has significantly lower equivalent inertia (
) with trajectory, which decreases few hundred ms before out-of-step is developed (
Figure 13b—blue line). Line with stable swing has higher values of equivalent inertia and zero crossings exists (
Figure 13b—green line).
7. Conclusions
Developing protection algorithm for fast and efficient detection and reaction to angle instability is important for transmission network operations. It acts as an important segment of WAMPAC applications in control centers. This paper presented simulation results that provide guidelines for the design of such protection algorithm, and finally gave an algorithm design suggestion. Algorithm was described in an analytical way with flow diagram devised based on simulation results and corresponding simulation conclusions.
Proposed protection algorithm based on PMU data has advantages when compared to the traditional relay protection logic. This protection method is not dependable on network configurations and enables good observability and detection of different disturbances including power swing and out-of-step conditions. Developed algorithm is robust and simple to implement (short processing and delay times) on transmission line equipped with PMU devices. It operates on transmission line independently from other elements (any number of generators, lines, transformers, or FACTS devices) that can also be connected to the observed busbar.
The proposed algorithm will be unifying transmission phasor measurement in WAMPAC system, which will allow the creations of advanced protection functions in control centers. Future work will be focused on the implementation of developed algorithm in transmission system control center and extensive testing of the algorithm in real operation conditions.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}