Optimal Sizing and Location of Distributed Generators Based on PBIL and PSO Techniques


Abstract
:1. Introduction
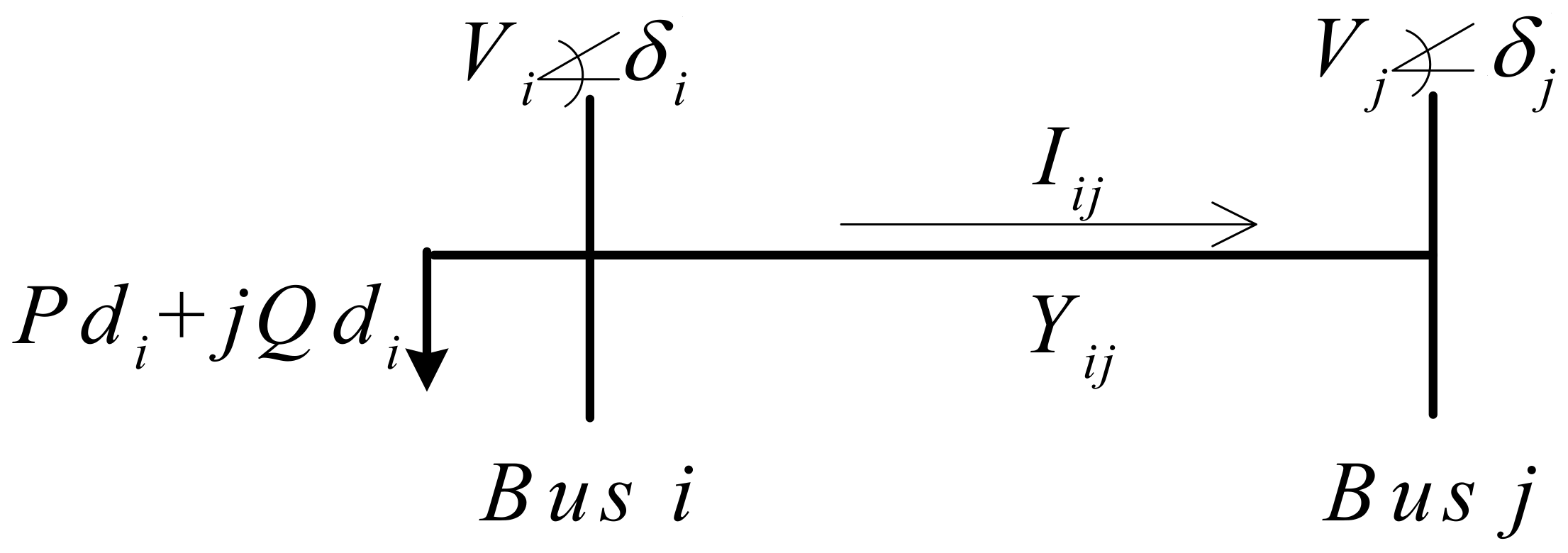
2. Problem Formulation
2.1. Optimal Location and Sizing of DGs
2.2. Constraints
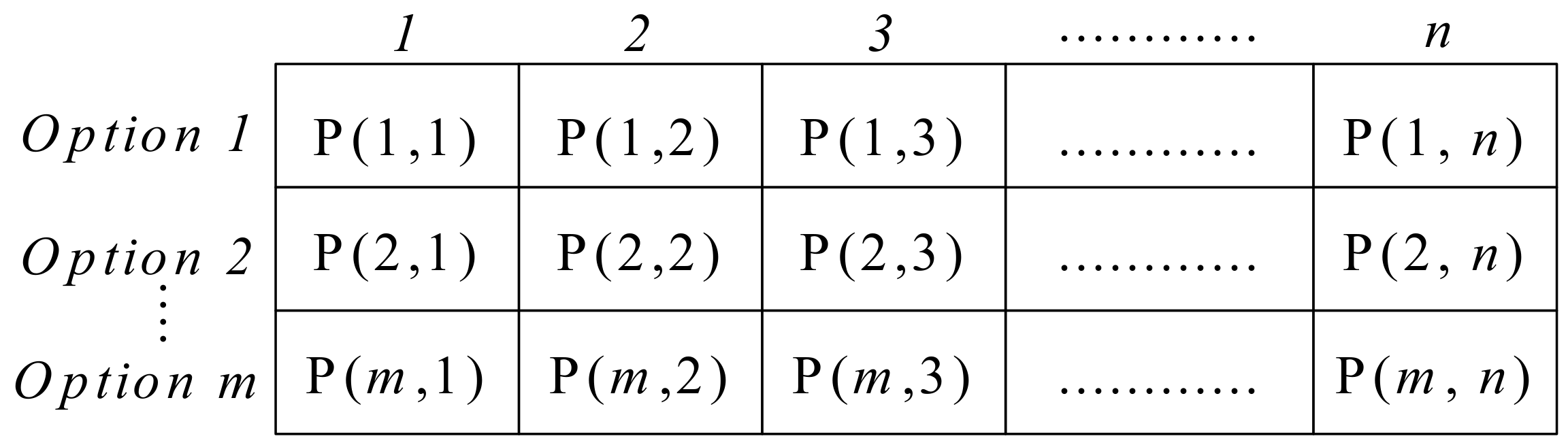
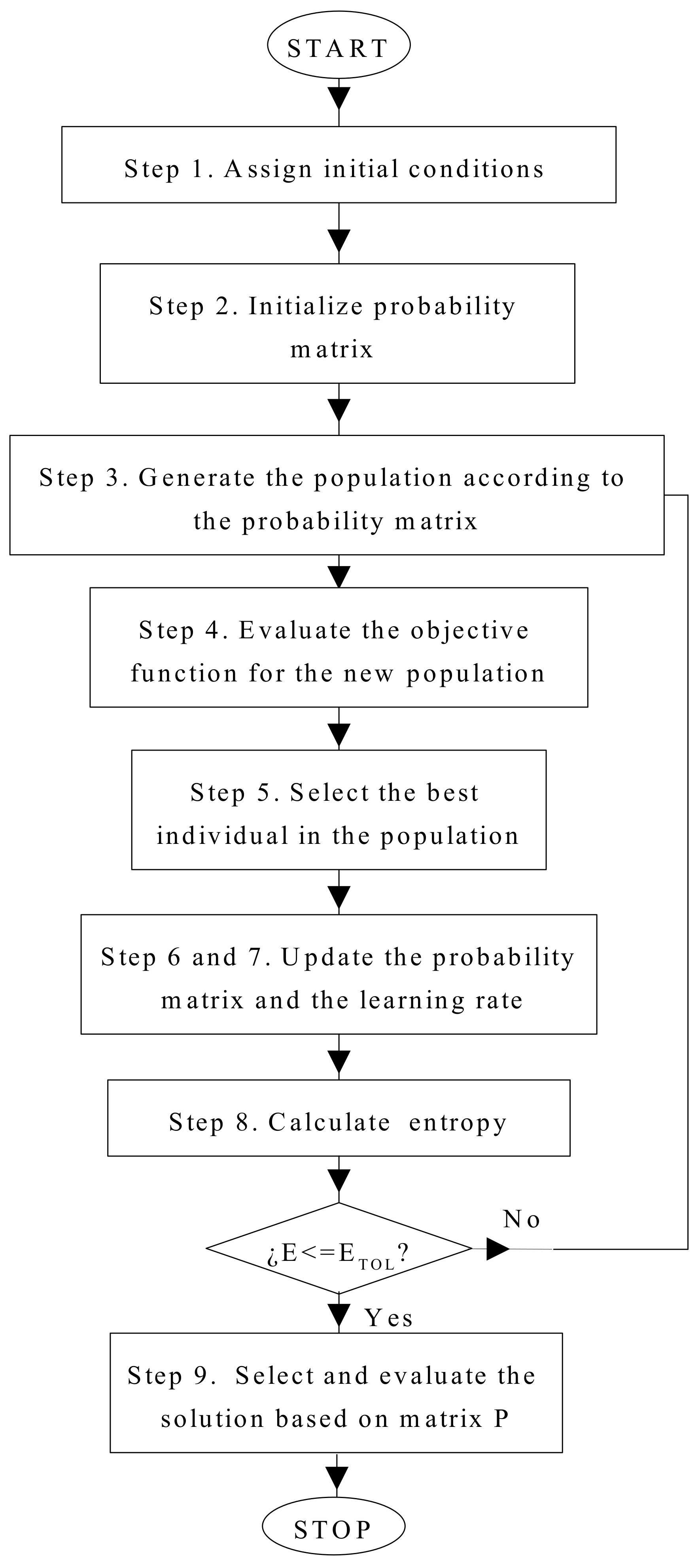
3. Overview of Population-Based Incremental Learning (PBIL)
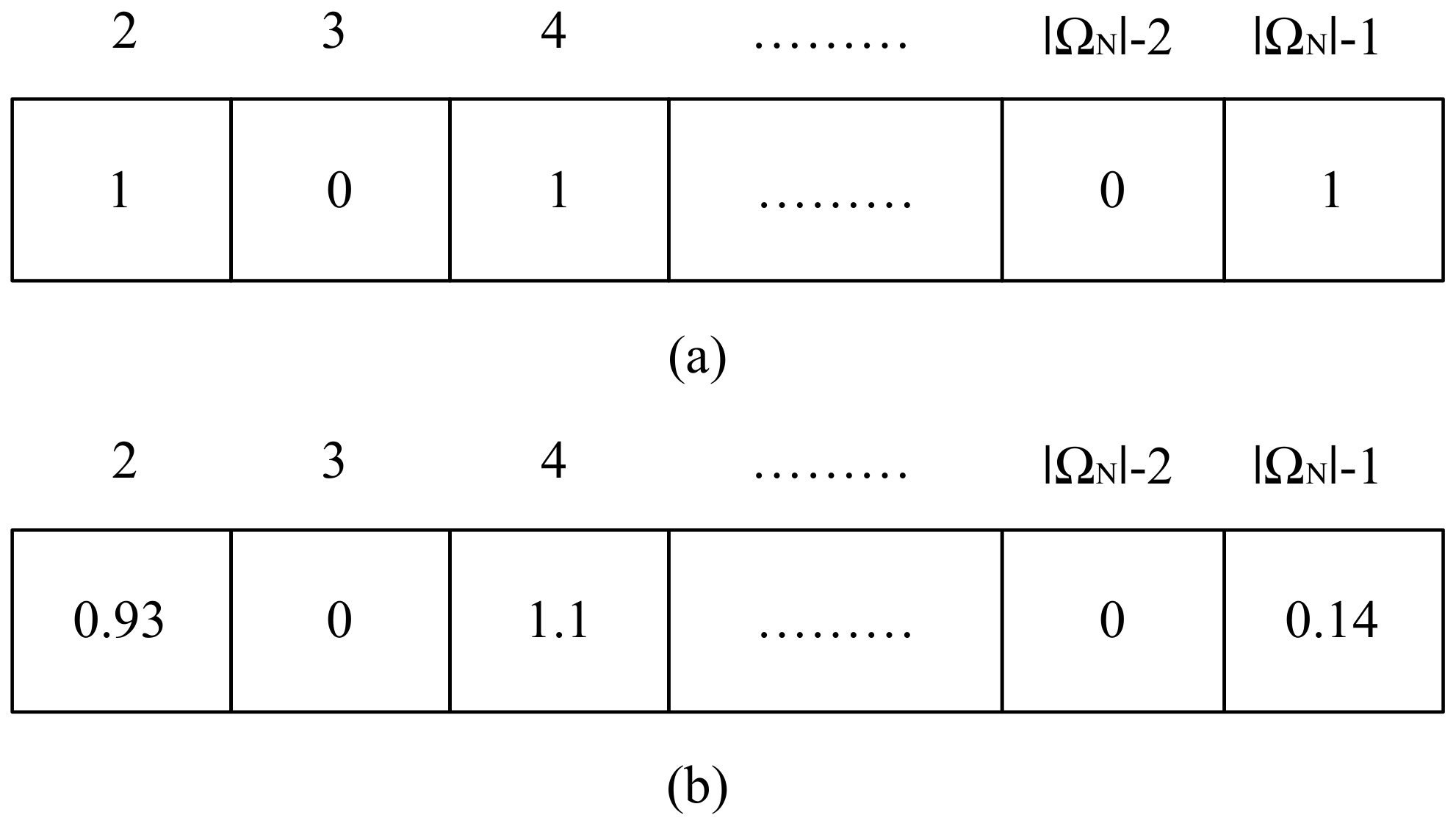
- Population size : Number of individuals generated at each iterative cycle of the algorithm. This number depends on the size of the solution space and the desired evaluation spectrum. Then, the initial population is randomly constructed.
- Initial probability: Provides the probability matrix for the initial parameters. In this step the same probability is assigned to each element to be considered in the solution of the problem, providing in this way a fair initial condition. For the binary case discussed here, the initial probability is 0.5 since there are only two options (locate or not a generator in the node).
- Learning rate type and maximum-minimum limits: can be defined in multiple forms, e.g., linear, exponential, sigmoidal and bell-shaped. The assignment of minimum and maximum limits in the range (0–1) enable to control the convergence time and the size of the solution space to be explored [47].
- Stopping criterion : Defines the stopping condition of the algorithm. For this purpose, an assigned entropy tolerance is in charge of ending the iterative process, i.e., when the entropy reaches that value the algorithm stops. The search intensity of the algorithm depends on the selection of this tolerance; a small tolerance will result in a wider exploration of the solution space.
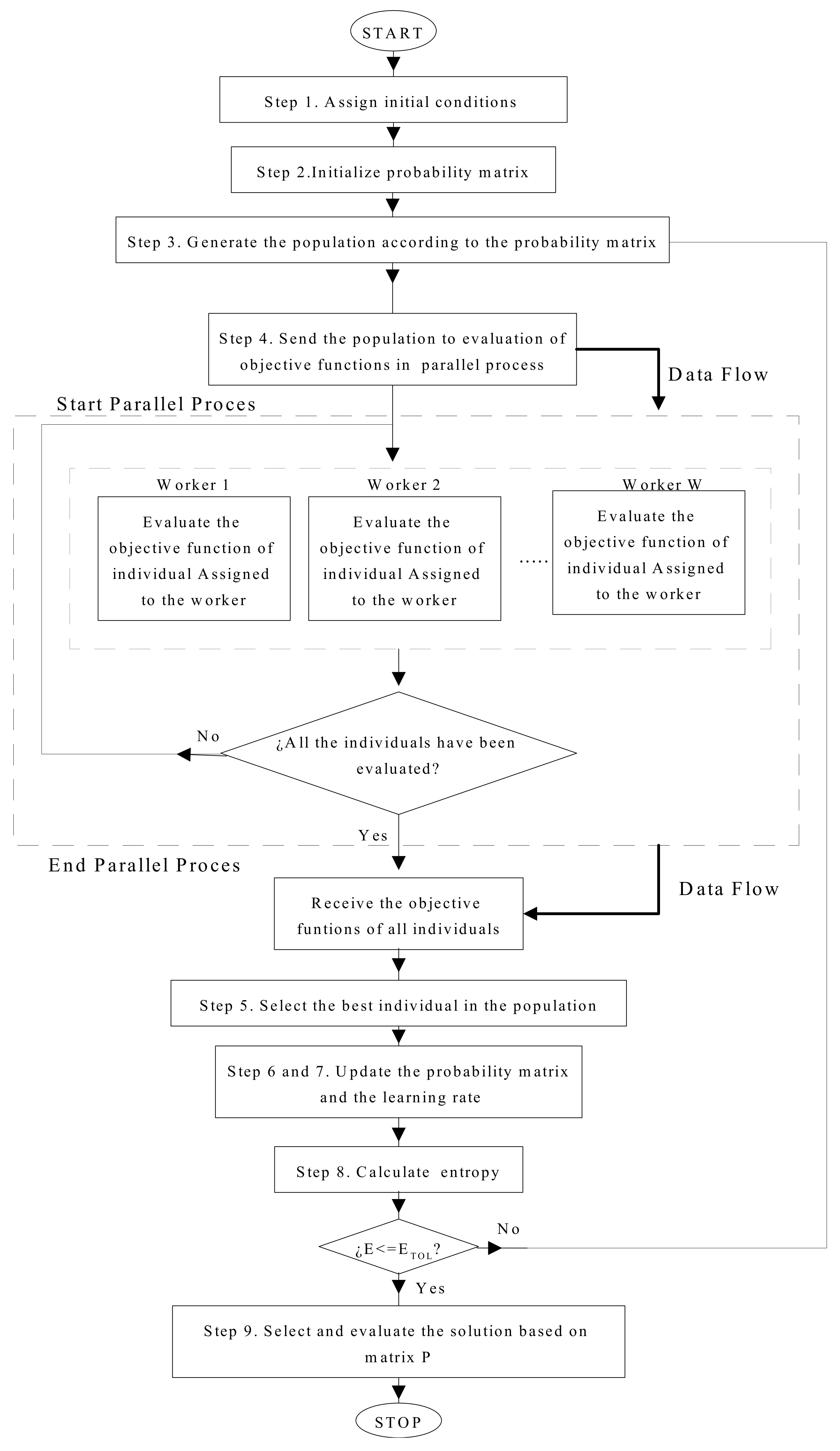
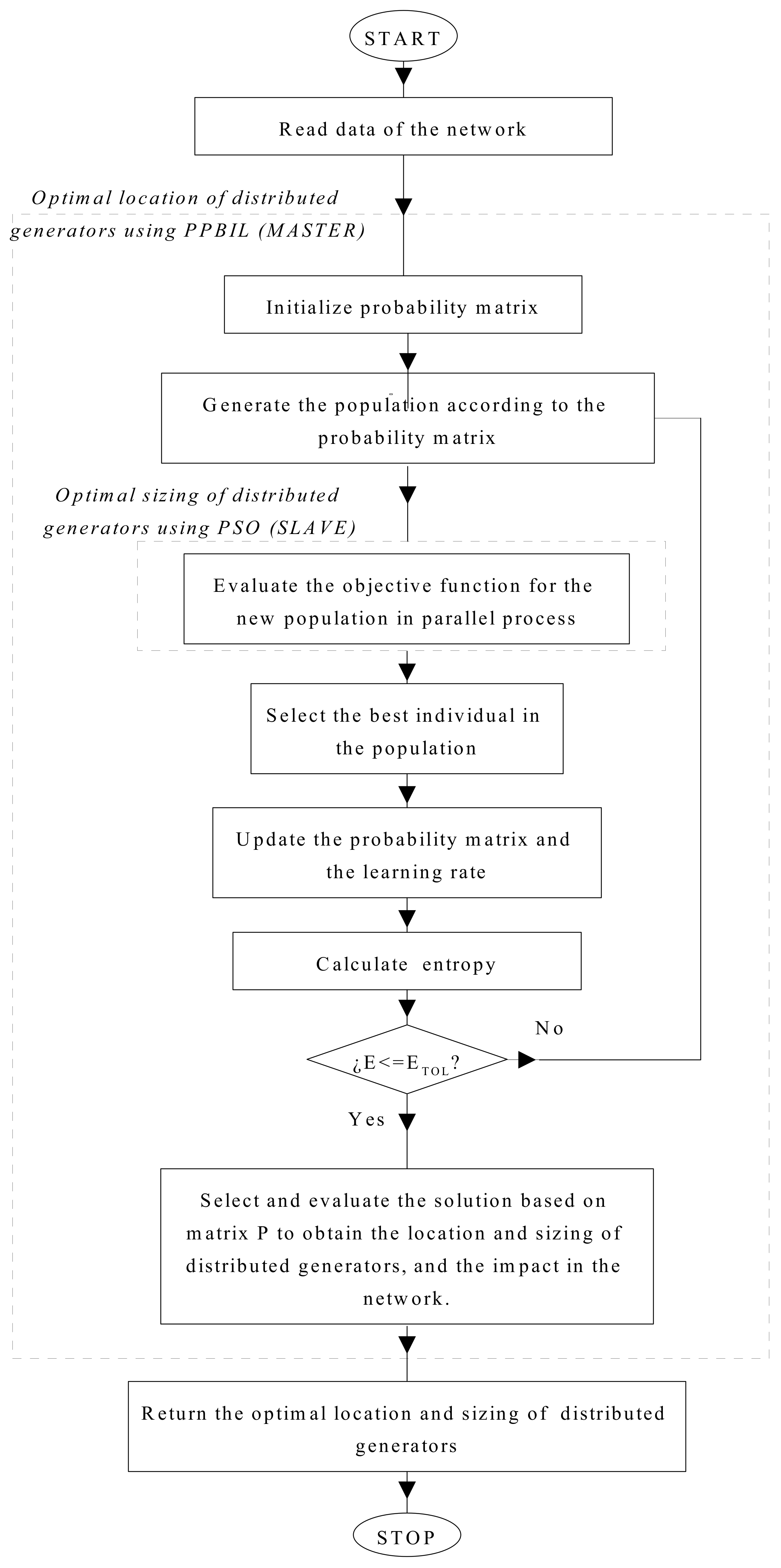
4. Parallel PBIL Algorithm (PPBIL)
5. Sizing and Location of DGs Using PPBIL-PSO
6. Performance Evaluation and Practical Tests
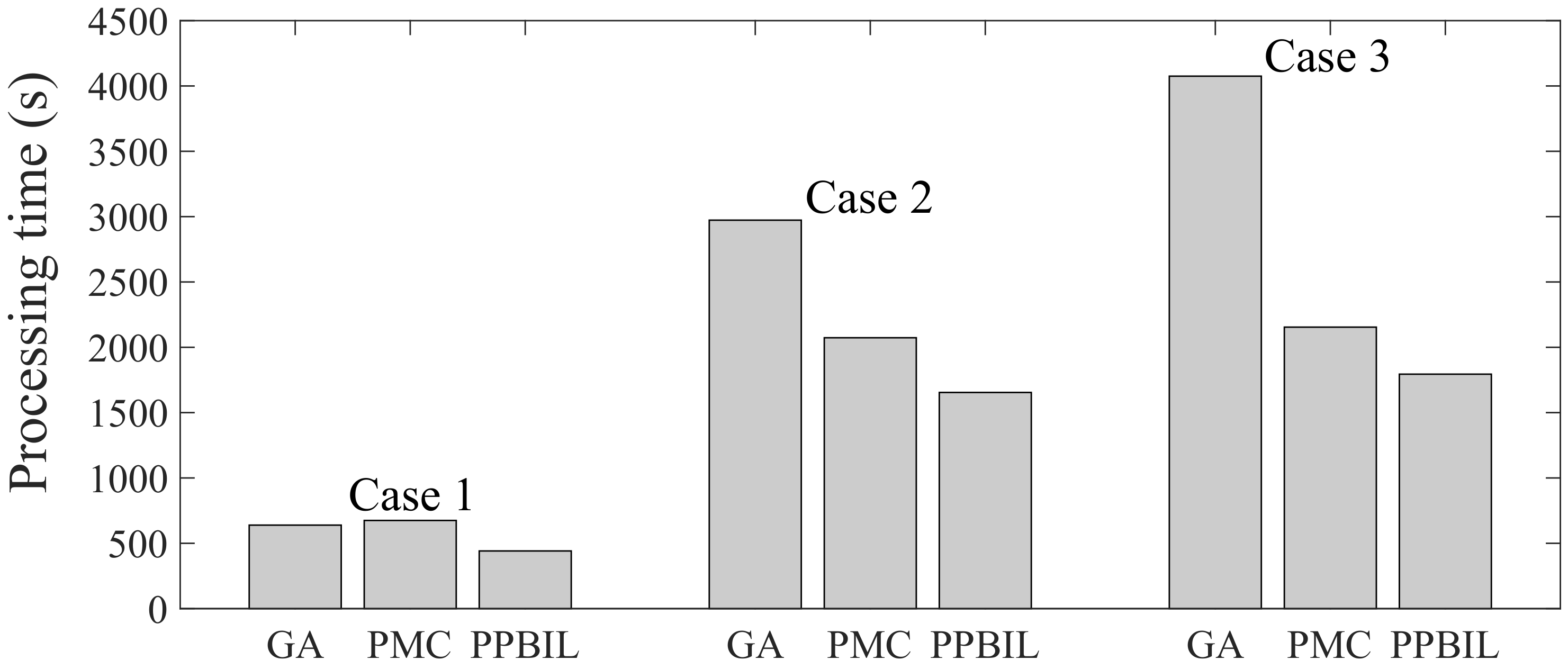
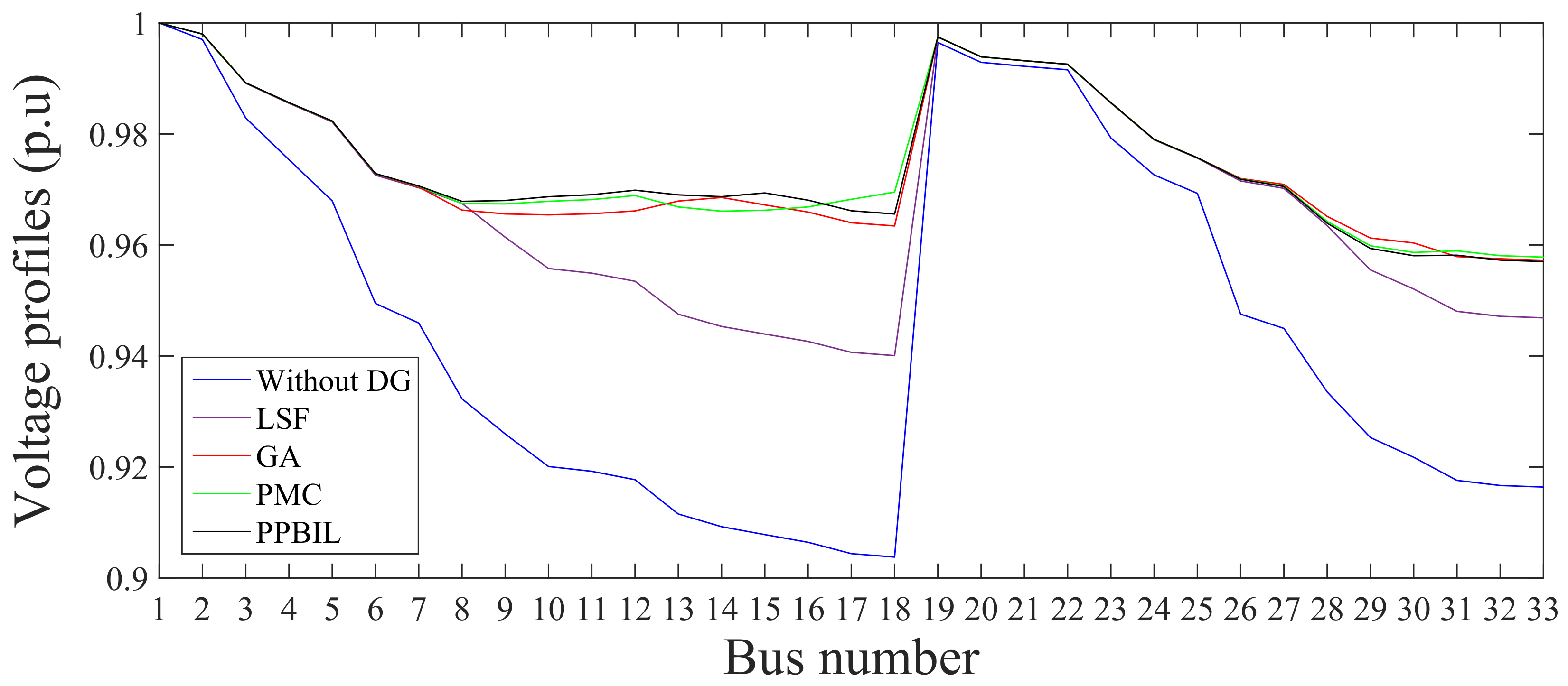
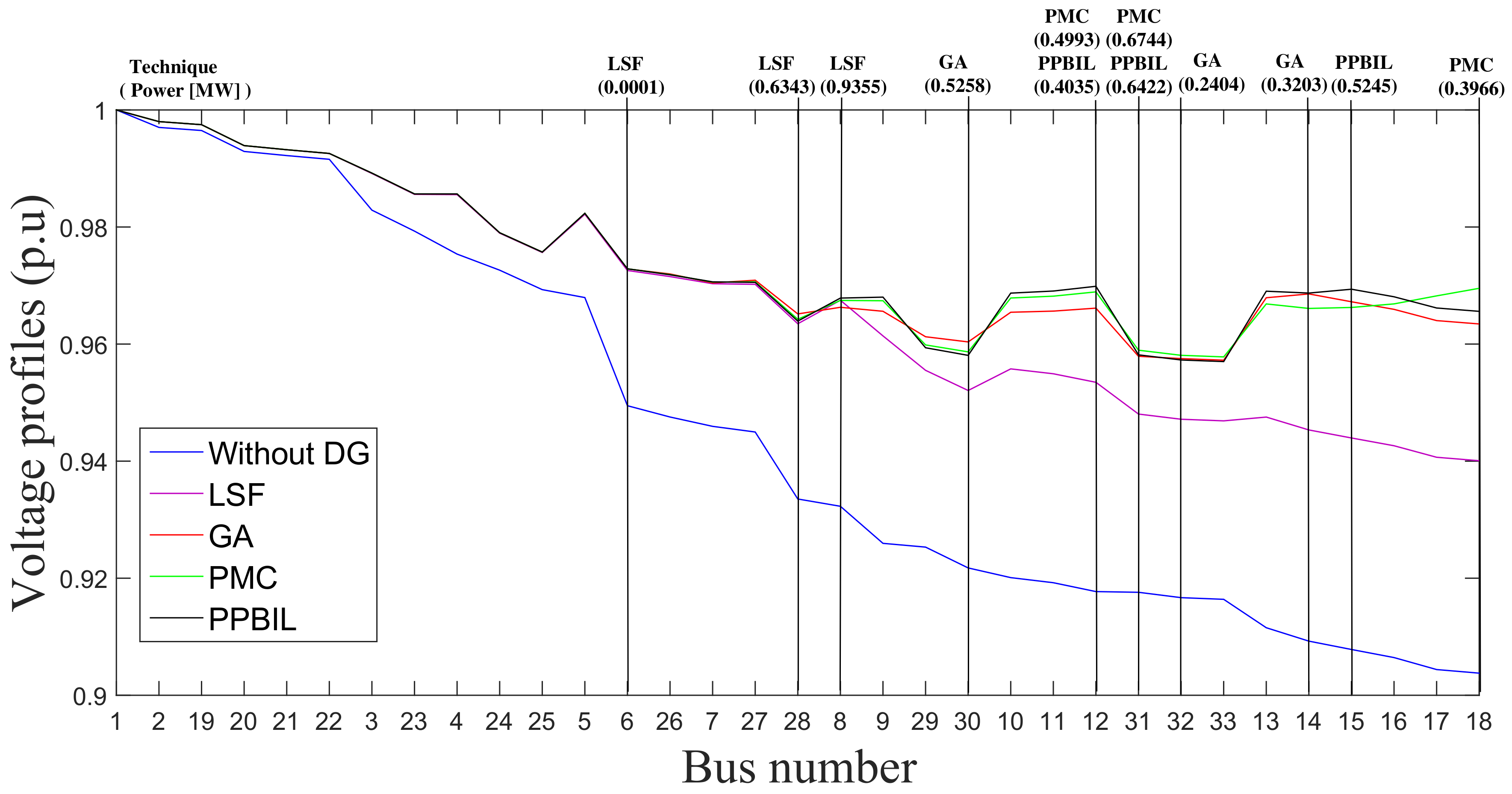
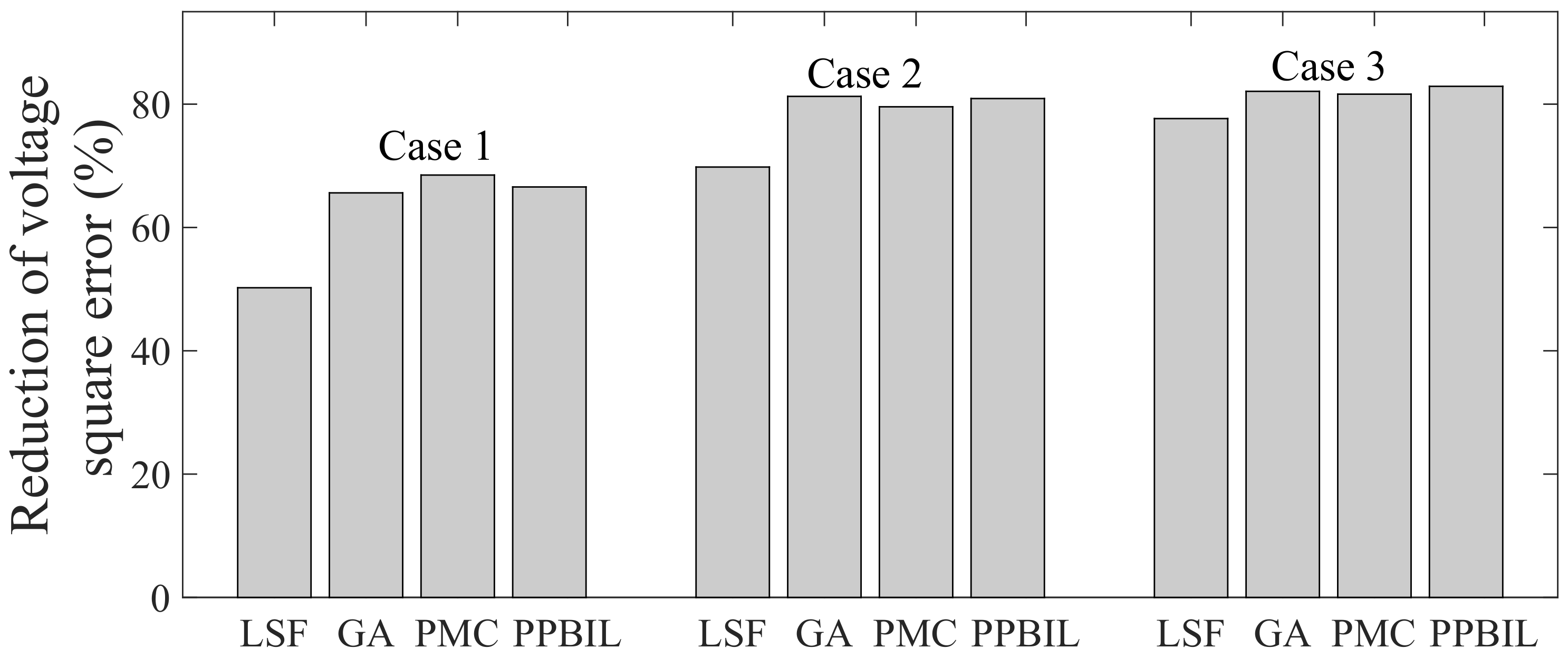
6.1. 33 Bus Test System
6.2. 69 Bus Test System
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Data of the Test Systems
Appendix A.1. 33 Bus System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Branch Number | Sending Bus | Receiving Bus | Resistance (Omega) | Reactance (Omega) | Active Power in Receiving Bus (kW) | Ractive Power in Receiving Bus (kVAR) |
|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 0.0922 | 0.0477 | 100 | 60 |
| 2 | 2 | 3 | 0.4930 | 0.2511 | 90 | 40 |
| 3 | 3 | 4 | 0.3660 | 0.1864 | 120 | 80 |
| 4 | 4 | 5 | 0.3811 | 0.1941 | 60 | 30 |
| 5 | 5 | 6 | 0.819 | 0.7070 | 60 | 20 |
| 6 | 6 | 7 | 0.1872 | 0.6188 | 200 | 100 |
| 7 | 7 | 8 | 1.7114 | 1.2351 | 200 | 100 |
| 8 | 8 | 9 | 1.0300 | 0.7400 | 60 | 20 |
| 9 | 9 | 10 | 1.0400 | 0.7400 | 60 | 20 |
| 10 | 10 | 11 | 0.1966 | 0.0650 | 45 | 30 |
| 11 | 11 | 12 | 0.3744 | 0.1238 | 60 | 35 |
| 12 | 12 | 13 | 1.4680 | 1.1550 | 60 | 35 |
| 13 | 13 | 14 | 0.5416 | 0.7129 | 120 | 80 |
| 14 | 14 | 15 | 0.5910 | 0.5260 | 60 | 10 |
| 15 | 15 | 16 | 0.7463 | 0.5450 | 60 | 20 |
| 16 | 16 | 17 | 1.2890 | 1.7210 | 60 | 20 |
| 17 | 17 | 18 | 0.7320 | 0.5740 | 90 | 40 |
| 18 | 2 | 19 | 0.1640 | 0.1565 | 90 | 40 |
| 19 | 19 | 20 | 1.5042 | 1.3554 | 90 | 40 |
| 20 | 20 | 21 | 0.4095 | 0.4784 | 90 | 40 |
| 21 | 21 | 22 | 0.7089 | 0.9373 | 90 | 40 |
| 22 | 3 | 23 | 0.4512 | 0.3083 | 90 | 50 |
| 23 | 23 | 24 | 0.8980 | 0.7091 | 420 | 200 |
| 24 | 24 | 25 | 0.8960 | 0.7011 | 420 | 200 |
| 25 | 6 | 26 | 0.2030 | 0.1034 | 60 | 25 |
| 26 | 26 | 27 | 0.2842 | 0.1447 | 60 | 25 |
| 27 | 27 | 28 | 1.0590 | 0.9337 | 60 | 20 |
| 28 | 28 | 29 | 0.8042 | 0.7006 | 120 | 70 |
| 29 | 29 | 30 | 0.5075 | 0.2585 | 200 | 600 |
| 30 | 30 | 31 | 0.9744 | 0.9630 | 150 | 70 |
| 31 | 31 | 32 | 0.3105 | 0.3619 | 210 | 100 |
Appendix A.2. 69 Bus System
| Branch Number | Sending Bus | Receiving Bus | Resistance (Omega) | Reactance (Omega) | Active Power in Receiving Bus (kW) | Ractive Power in Receiving Bus (kVAR) |
|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 0.0005 | 0.0012 | 0 | 0 |
| 2 | 2 | 3 | 0.0005 | 0.0012 | 0 | 0 |
| 3 | 3 | 4 | 0.0015 | 0.0036 | 0 | 0 |
| 4 | 4 | 5 | 0.0215 | 0.0294 | 0 | 0 |
| 5 | 5 | 6 | 0.366 | 0.1864 | 2.6 | 2.2 |
| 6 | 6 | 7 | 0.3810 | 0.1941 | 40.4 | 30 |
| 7 | 7 | 8 | 0.0922 | 0.047 | 75 | 54 |
| 8 | 8 | 9 | 0.0493 | 0.0251 | 30 | 22 |
| 9 | 9 | 10 | 0.8190 | 0.2707 | 28 | 19 |
| 10 | 10 | 11 | 0.1872 | 0.0619 | 145 | 104 |
| 11 | 11 | 12 | 0.7114 | 0.2351 | 145 | 104 |
| 12 | 12 | 13 | 1.0300 | 0.3400 | 8 | 5 |
| 13 | 13 | 14 | 1.0440 | 0.3400 | 8 | 5 |
| 14 | 14 | 15 | 1.0580 | 0.3496 | 0 | 0 |
| 15 | 15 | 16 | 0.1966 | 0.0650 | 45 | 30 |
| 16 | 16 | 17 | 0.3744 | 0.1238 | 60 | 35 |
| 17 | 17 | 18 | 0.0047 | 0.0016 | 60 | 35 |
| 18 | 18 | 19 | 0.3276 | 0.1083 | 0 | 0 |
| 19 | 19 | 20 | 0.2106 | 0.0690 | 1 | 0.6 |
| 20 | 20 | 21 | 0.3416 | 0.1129 | 114 | 81 |
| 21 | 21 | 22 | 0.0140 | 0.0046 | 5 | 3.5 |
| 22 | 22 | 23 | 0.1591 | 0.0526 | 0 | 0 |
| 23 | 23 | 24 | 0.3463 | 0.1145 | 28 | 20 |
| 24 | 24 | 25 | 0.7488 | 0.2475 | 0 | 0 |
| 25 | 25 | 26 | 0.3089 | 0.1021 | 14 | 10 |
| 26 | 26 | 27 | 0.1732 | 0.0572 | 14 | 10 |
| 27 | 3 | 28 | 0.0044 | 0.0108 | 26 | 18.6 |
| 28 | 28 | 29 | 0.0640 | 0.1565 | 26 | 18.6 |
| 29 | 29 | 30 | 0.3978 | 0.1315 | 0 | 0 |
| 30 | 30 | 31 | 0.0702 | 0.0232 | 0 | 0 |
| 31 | 31 | 32 | 0.3510 | 0.1160 | 0 | 0 |
| 32 | 32 | 33 | 0.8390 | 0.2816 | 10 | 10 |
| 33 | 33 | 34 | 1.7080 | 0.5646 | 14 | 14 |
| 34 | 34 | 35 | 1.4740 | 0.4873 | 4 | 4 |
| 35 | 3 | 36 | 0.0044 | 0.0108 | 26 | 18.55 |
| Branch Number | Sending Bus | Receiving Bus | Resistance (Omega) | Reactance (Omega) | Active Power in Receiving Bus (kW) | Ractive Power in Receiving Bus (kVAR) |
|---|---|---|---|---|---|---|
| 36 | 36 | 37 | 0.0640 | 0.1565 | 26 | 18.55 |
| 37 | 37 | 38 | 0.1053 | 0.1230 | 0 | 0 |
| 38 | 38 | 39 | 0.0304 | 0.0355 | 24 | 17 |
| 39 | 39 | 40 | 0.0018 | 0.0021 | 24 | 17 |
| 40 | 40 | 41 | 0.7283 | 0.8509 | 102 | 1 |
| 41 | 41 | 42 | 0.3100 | 0.3623 | 0 | 0 |
| 42 | 42 | 43 | 0.0410 | 0.0478 | 6 | 4.3 |
| 43 | 43 | 44 | 0.0092 | 0.0116 | 0 | 0 |
| 44 | 44 | 45 | 0.1089 | 0.1373 | 39.22 | 26.3 |
| 45 | 45 | 46 | 0.0009 | 0.0012 | 39.22 | 26.3 |
| 46 | 4 | 47 | 0.0034 | 0.0084 | 0 | 0 |
| 47 | 47 | 48 | 0.0851 | 0.2083 | 79 | 56.4 |
| 48 | 48 | 49 | 0.2898 | 0.7091 | 384.7 | 274.5 |
| 49 | 49 | 50 | 0.0822 | 0.2011 | 384.7 | 274.5 |
| 50 | 8 | 51 | 0.0928 | 0.0473 | 40.5 | 28.3 |
| 51 | 51 | 52 | 0.3319 | 0.1140 | 3.6 | 2.7 |
| 52 | 9 | 53 | 0.1740 | 0.0886 | 4.35 | 3.5 |
| 53 | 53 | 54 | 0.2030 | 0.1034 | 26.4 | 19 |
| 54 | 54 | 55 | 0.2842 | 0.1447 | 24 | 17.2 |
| 55 | 55 | 56 | 0.2813 | 0.1433 | 0 | 0 |
| 56 | 56 | 57 | 1.5900 | 0.5337 | 0 | 0 |
| 57 | 57 | 58 | 0.7837 | 0.2630 | 0 | 0 |
| 58 | 58 | 59 | 0.3042 | 0.1006 | 100 | 72 |
| 59 | 59 | 60 | 0.3861 | 0.1172 | 0 | 0 |
| 60 | 60 | 61 | 0.5075 | 0.2585 | 1244 | 888 |
| 61 | 61 | 62 | 0.0974 | 0.0496 | 32 | 23 |
| 62 | 62 | 63 | 0.1450 | 0.0738 | 0 | 0 |
| 63 | 63 | 64 | 0.7105 | 0.3619 | 227 | 162 |
| 64 | 64 | 65 | 1.0410 | 0.5302 | 59 | 42 |
| 65 | 65 | 66 | 0.2012 | 0.0611 | 18 | 13 |
| 66 | 66 | 67 | 0.0047 | 0.0014 | 18 | 13 |
| 67 | 67 | 68 | 0.7394 | 0.2444 | 28 | 20 |
| 68 | 68 | 69 | 0.0047 | 0.0016 | 28 | 20 |
References
- Huang, Y.; Söder, L. Evaluation of economic regulation in distribution systems with distributed generation. Energy 2017, 126, 192–201. [Google Scholar] [CrossRef]
- Colmenar-Santos, A.; Reino-Rio, C.; Borge-Diez, D.; Collado-Fernández, E. Distributed generation: A review of factors that can contribute most to achieve a scenario of DG units embedded in the new distribution networks. Renew. Sustain. Energy Rev. 2016, 59, 1130–1148. [Google Scholar] [CrossRef]
- Ameli, A.; Ahmadifar, A.; Shariatkhah, M.H.; Vakilian, M.; Haghifam, M.R. A dynamic method for feeder reconfiguration and capacitor switching in smart distribution systems. Int. J. Electr. Power Energy Syst. 2017, 85, 200–211. [Google Scholar] [CrossRef]
- Gopiya Naik, S.; Khatod, D.; Sharma, M. Optimal allocation of combined DG and capacitor for real power loss minimization in distribution networks. Int. J. Electr. Power Energy Syst. 2013, 53, 967–973. [Google Scholar] [CrossRef]
- Savić, A.; Đurišić, Ž. Optimal sizing and location of SVC devices for improvement of voltage profile in distribution network with dispersed photovoltaic and wind power plants. Appl. Energy 2014, 134, 114–124. [Google Scholar] [CrossRef]
- De Lima, M.A.X.; Clemente, T.R.N.; de Almeida, A.T. Prioritization for allocation of voltage regulators in electricity distribution systems by using a multicriteria approach based on additive-veto model. Int. J. Electr. Power Energy Syst. 2016, 77, 1–8. [Google Scholar] [CrossRef]
- Santos, S.F.; Fitiwi, D.Z.; Cruz, M.R.; Cabrita, C.M.; Catalão, J.P. Impacts of optimal energy storage deployment and network reconfiguration on renewable integration level in distribution systems. Appl. Energy 2017, 185, 44–55. [Google Scholar] [CrossRef]
- Daud, S.; Kadir, A.; Gan, C.; Mohamed, A.; Khatib, T. A comparison of heuristic optimization techniques for optimal placement and sizing of photovoltaic based distributed generation in a distribution system. Sol. Energy 2016, 140, 219–226. [Google Scholar] [CrossRef]
- Picciariello, A.; Alvehag, K.; Soder, L. State-of-art review on regulation for distributed generation integration in distribution systems. In Proceedings of the 2012 9th International Conference on the European Energy Market, Florence, Italy, 10–12 May 2012; pp. 1–8. [Google Scholar]
- Minnaar, U. Regulatory practices and Distribution System Cost impact studies for distributed generation: Considerations for South African distribution utilities and regulators. Renew. Sustain. Energy Rev. 2016, 56, 1139–1149. [Google Scholar] [CrossRef]
- Chiradeja, P.; Ramakumar, R. An Approach to Quantify the Technical Benefits of Distributed Generation. IEEE Trans. Energy Convers. 2004, 19, 764–773. [Google Scholar] [CrossRef]
- Prakash, P.; Khatod, D.K. Optimal sizing and siting techniques for distributed generation in distribution systems: A review. Renew. Sustain. Energy Rev. 2016, 57, 111–130. [Google Scholar] [CrossRef]
- Balamurugan, K.; Srinivasan, D.; Reindl, T. Impact of Distributed Generation on Power Distribution Systems. Energy Procedia 2012, 25, 93–100. [Google Scholar] [CrossRef]
- Rezaee Jordehi, A. Allocation of distributed generation units in electric power systems: A review. Renew. Sustain. Energy Rev. 2016, 56, 893–905. [Google Scholar] [CrossRef]
- Theo, W.L.; Lim, J.S.; Ho, W.S.; Hashim, H.; Lee, C.T. Review of distributed generation (DG) system planning and optimisation techniques: Comparison of numerical and mathematical modelling methods. Renew. Sustain. Energy Rev. 2017, 67, 531–573. [Google Scholar] [CrossRef]
- Pesaran, H.A.M.; Huy, P.D.; Ramachandaramurthy, V.K. A review of the optimal allocation of distributed generation: Objectives, constraints, methods, and algorithms. Renew. Sustain. Energy Rev. 2017, 75, 293–312. [Google Scholar] [CrossRef]
- Ouyang, W.; Cheng, H.; Zhang, X.; Yao, L. Distribution network planning method considering distributed generation for peak cutting. Energy Convers. Manag. 2010, 51, 2394–2401. [Google Scholar] [CrossRef]
- Chu, P.; Beasley, J. A genetic algorithm for the generalized assignment problem. Comput. Oper. Res. 1997, 24, 17–23. [Google Scholar] [CrossRef]
- El-Zonkoly, A. Optimal placement of multi-distributed generation units including different load models using particle swarm optimization. Swarm Evol. Comput. 2011, 1, 50–59. [Google Scholar] [CrossRef]
- Moradi, M.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Mohamed Imran, A.; Kowsalya, M. Optimal size and siting of multiple distributed generators in distribution system using bacterial foraging optimization. Swarm Evol. Comput. 2014, 15, 58–65. [Google Scholar] [CrossRef]
- Jain, N.; Singh, S.; Srivastava, S. PSO based placement of multiple wind DGs and capacitors utilizing probabilistic load flow model. Swarm Evol. Comput. 2014, 19, 15–24. [Google Scholar] [CrossRef]
- Kefayat, M.; Lashkar Ara, A.; Nabavi Niaki, S. A hybrid of ant colony optimization and artificial bee colony algorithm for probabilistic optimal placement and sizing of distributed energy resources. Energy Convers. Manag. 2015, 92, 149–161. [Google Scholar] [CrossRef]
- Saha, S.; Mukherjee, V. Optimal placement and sizing of DGs in RDS using chaos embedded SOS algorithm. IET Gener. Transm. Distrib. 2016, 10, 3671–3680. [Google Scholar] [CrossRef]
- Ali, E.; Abd Elazim, S.; Abdelaziz, A. Ant Lion Optimization Algorithm for optimal location and sizing of renewable distributed generations. Renew. Energy 2017, 101, 1311–1324. [Google Scholar] [CrossRef]
- Kaur, S.; Kumbhar, G.B.; Sharma, J. Performance of Mixed Integer Non-linear Programming and Improved Harmony Search for optimal placement of DG units. In Proceedings of the 2014 IEEE PES General Meeting | Conference Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Baluja, S. Population-Based Incremental Learning: A Method for Integrating Genetic Search Based Function Optimization and Competitive Learning; School of Computer Science, Carnegie Mellon University: Pittsburgh, Pennsylvania, 1994; pp. 1–41. [Google Scholar]
- Wang, J.; Zhou, Y.; Yin, J.; Zhang, Y. Competitive hopfield network combined with estimation of distribution for maximum diversity problems. IEEE Trans. Syst. Man Cybern. B Cybern. 2009, 39, 1048–1066. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Wang, Y.; Li, S.; Liu, Y.; Todo, Y.; Gao, S. Immune algorithm combined with estimation of distribution for traveling salesman problem. IEEJ Trans. Electr. Electron. Eng. 2016, 11, S142–S154. [Google Scholar] [CrossRef]
- Rastegar, R. On the Optimal Convergence Probability of Univariate Estimation of Distribution Algorithms. Evol. Comput. 2011, 19, 225–248. [Google Scholar] [CrossRef] [PubMed]
- Carnero, M.; Hernández, J.; Sánchez, M. A new metaheuristic based approach for the design of sensor networks. Comput. Chem. Eng. 2013, 55, 83–96. [Google Scholar] [CrossRef]
- Folly, K.A.; Venayagamoorthy, G.K. Power system controller design using multi-population PBIL. In Proceedings of the 2013 IEEE Computational Intelligence Applications in Smart Grid (CIASG), Singapore, 16–19 April 2013; pp. 37–43. [Google Scholar]
- Bolanos, F.; Aedo, J.E.; Rivera, F.; Bagherzadeh, N. Mapping and Scheduling in Heterogeneous NoC through Population-Based Incremental Learning. J. Univers. Comput. Sci. 2012, 18, 901–916. [Google Scholar]
- Corea-Araujo, J.A.; Martinez-Velasco, J.A.; Magnusson, J. Optimum design of hybrid HVDC circuit breakers using a parallel genetic algorithm and a MATLAB-EMTP environment. IET Gener. Transm. Distrib. 2017, 11, 2974–2982. [Google Scholar] [CrossRef]
- Kansal, S.; Kumar, V.; Tyagi, B. Optimal placement of different type of DG sources in distribution networks. Int. J. Electr. Power Energy Syst. 2013, 53, 752–760. [Google Scholar] [CrossRef]
- Ahmad Khan, A.; Naeem, M.; Iqbal, M.; Qaisar, S.; Anpalagan, A. A compendium of optimization objectives, constraints, tools and algorithms for energy management in microgrids. Renew. Sustain. Energy Rev. 2016, 58, 1664–1683. [Google Scholar] [CrossRef]
- Martinez, J.A.; Guerra, G. A parallel Monte Carlo method for optimum allocation of distributed generation. IEEE Trans. Power Syst. 2014, 29, 2926–2933. [Google Scholar] [CrossRef]
- Grisales, L.F.; Restrepo Cuestas, B.J.; Jaramillo, F.E. Ubicación y dimensionamiento de generación distribuida: Una revisíon. Cienc. Ing. Neogranad. 2017, 27, 157–176. [Google Scholar] [CrossRef]
- Nekooei, K.; Farsangi, M.M.; Nezamabadi-Pour, H.; Lee, K.Y. An Improved Multi-Objective Harmony Search for Optimal Placement of DGs in Distribution Systems. IEEE Trans. Smart Grid 2013, 4, 557–567. [Google Scholar] [CrossRef]
- Grainger, J.; Stevenson, W. Power System Analysis; McGraw Hill: New York, NY, USA, 1994; p. 743. [Google Scholar]
- Ceberio, J.; Irurozki, E.; Mendiburu, A.; Lozano, J.A. A review on estimation of distribution algorithms in permutation-based combinatorial optimization problems. Prog. Artif. Intell. 2012, 1, 103–117. [Google Scholar] [CrossRef]
- Larrañaga, P.; Karshenas, H.; Bielza, C.; Santana, R. A review on probabilistic graphical models in evolutionary computation. J. Heuristics 2012, 18, 795–819. [Google Scholar] [CrossRef] [Green Version]
- Shakya, S.; Santana, R. A Review of Estimation of Distribution Algorithms and Markov Networks; Chapter 2-A Review; Springer: Berlin, Germany, 2012; pp. 21–37. [Google Scholar]
- González, C.; Lozano, J.A.; Larrañaga, P. The Convergence Behavior of the PBIL Algorithm: A Preliminary Approach. In Artificial Neural Nets and Genetic Algorithms; Springer: Vienna, Austria, 2001; pp. 228–231. [Google Scholar]
- Zangari, M.; Santana, R.; Mendiburu, A.; Pozo, A. Not all PBILs are the same: Unveiling the different learning mechanisms of PBIL variants. Appl. Soft Comput. 2017, 53, 88–96. [Google Scholar] [CrossRef]
- Bolanos, F.; Aedo, J.E.; Rivera, F. Comparison of Learning Rules for Adaptive Population-Based Incremental Learning Algorithms. In Proceedings of the Proceedings on the International Conference on Artificial Intelligence (ICAI), San Diego, CA, USA, 16–19 July 2012; p. 1. [Google Scholar]
- Rinaldi, P.; Dari, E.; Vénere, M.; Clausse, A. A Lattice-Boltzmann solver for 3D fluid simulation on GPU. Simul. Model. Pract. Theory 2012, 25, 163–171. [Google Scholar] [CrossRef]
- Lukač, N.; Žalik, B. GPU-based roofs’ solar potential estimation using LiDAR data. Comput. Geosci. 2013, 52, 34–41. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Sahoo, N.; Prasad, K. A fuzzy genetic approach for network reconfiguration to enhance voltage stability in radial distribution systems. Energy Convers. Manag. 2006, 47, 3288–3306. [Google Scholar] [CrossRef]
- Baran, M.; Wu, F. Optimal capacitor placement on radial distribution systems. IEEE Trans. Power Deliv. 1989, 4, 725–734. [Google Scholar] [CrossRef]
- Doğanşahin, K.; Kekezoğlu, B.; Yumurtac, R.; Erdinç, O.; Catalão, J. Maximum Permissible Integration Capacity of Renewable DG Units Based on System Loads. Energies 2018, 11, 255. [Google Scholar] [CrossRef]
- Grisales, L.F.; Montoya, O.D.; Grajales, A.; Hincapie, R.A.; Granada, M. Optimal Planning and Operation of Distribution Systems Considering Distributed Energy Resources and Automatic Reclosers. IEEE Lat. Am. Trans. 2018, 16, 126–134. [Google Scholar] [CrossRef]
- Zidan, A.; Gabbar, H. DG Mix and Energy Storage Units for Optimal Planning of Self-Sufficient Micro Energy Grids. Energies 2016, 9, 616. [Google Scholar] [CrossRef]
- Harrison, G.P.; Piccolo, A.; Siano, P.; Wallace, A.R. Hybrid GA and OPF evaluation of network capacity for distributed generation connections. Electr. Power Syst. Res. 2008, 78, 392–398. [Google Scholar] [CrossRef]
- Georgilakis, P.S.; Hatziargyriou, N.D. Optimal Distributed Generation Placement in Power Distribution Networks: Models, Methods, and Future Research. IEEE Trans. Power Syst. 2013, 28, 3420–3428. [Google Scholar] [CrossRef]




















| Method | Population Size | Selection Method | Rate Learning | Mutation | Stopping Criterion |
|---|---|---|---|---|---|
| GA | 12 | Tournament | Cross over: simple | Binary simple | Maximum generational cycles (40) |
| PMC | 12 | Repeated random sampling | - - - - - - - - | - - - - - - - - | Maximum iterations (10) |
| PPBIL | 12 | Initial probability: 0.5 | Sigmoidal LRmin: 0.25, LRmax: 0.50 | Random Population | Entropy: (0.1) |
| Method | Population Size | Selection Method | Rate Learning | Mutation | Stopping Criterion |
|---|---|---|---|---|---|
| PSO | 30 | Congnitive and social component: 1.4 | Speed (Max-Min) (0.1–0.1) Inertia (Max-Min) (0.7–0.001) | R1 = R2: Random | Maximum iterations: (200) |
| Method | DG Location | DG Size (MW) | Plosses (MW) | %Plosses Reduction | Verror (p.u) | %Verror Reduction | Vworst (p.u) | Processing Time (s) |
|---|---|---|---|---|---|---|---|---|
| Without DGs | —– | —– | 0.2110 | —– | 0.1338 | —– | 0.9037 | —– |
| Case 1: Location of a single DG | ||||||||
| LSF | 6 | 1.2 | 0.1387 | 34.21 | 0.0803 | 39.94 | 0.9221 | 31.22 |
| GA | 12 | 1.2 | 0.1259 | 40.31 | 0.0426 | 68.15 | 0.9347 | 639.04 |
| PMC | 13 | 1.2 | 0.1294 | 38.62 | 0.0384 | 71.28 | 0.9347 | 674.79 |
| PPBIL | 13 | 1.2 | 0.1294 | 38.62 | 0.0384 | 71.28 | 0.9347 | 441.34 |
| Case 2: Location of two DGs | ||||||||
| LSF | 6 28 | 0.4739 1.0964 | 0.1180 | 44.04 | 0.0598 | 55.27 | 0.9277 | 120.19 |
| GA | 16 32 | 0.7984 0.7719 | 0.0954 | 54.77 | 0.0254 | 80.99 | 0.9603 | 2972.95 |
| PMC | 15 30 | 0.7989 0.7714 | 0.0938 | 55.53 | 0.0275 | 79.44 | 0.9552 | 2073.12 |
| PPBIL | 14 32 | 0.8721 0.6982 | 0.0938 | 55.50 | 0.0258 | 80.70 | 0.9590 | 1654.34 |
| Case 3: Location of three DGs | ||||||||
| LSF | 6 28 8 | 0.0001 0.6343 0.9355 | 0.1060 | 49.73 | 0.0472 | 64.66 | 0.9400 | 119.40 |
| GA | 14 30 32 | 0.3203 0.5258 0.2404 | 0.0917 | 56.49 | 0.0276 | 79.31 | 0.9572 | 4075.07 |
| PMC | 12 18 31 | 0.4993 0.3966 0.6744 | 0.0916 | 56.57 | 0.0266 | 80.08 | 0.9578 | 2154.28 |
| PPBIL | 12 15 31 | 0.4035 0.5245 0.6422 | 0.0915 | 56.60 | 0.0265 | 80.16 | 0.9570 | 1794.32 |
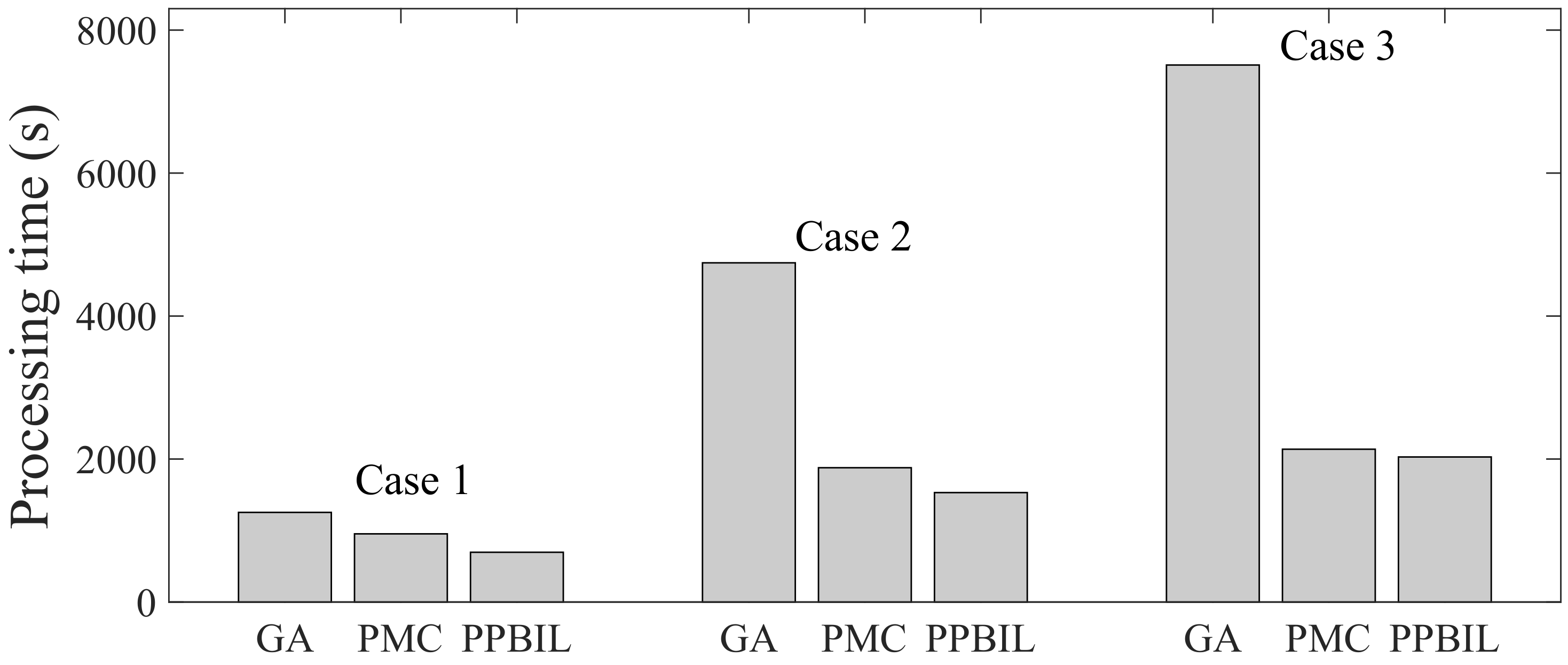
| Method | DG Location | DG Size (MW) | Plosses (MW) | %Plosses Reduction | Verror (p.u) | %Verror Reduction | Vworst (p.u) | Processing Time (s) |
|---|---|---|---|---|---|---|---|---|
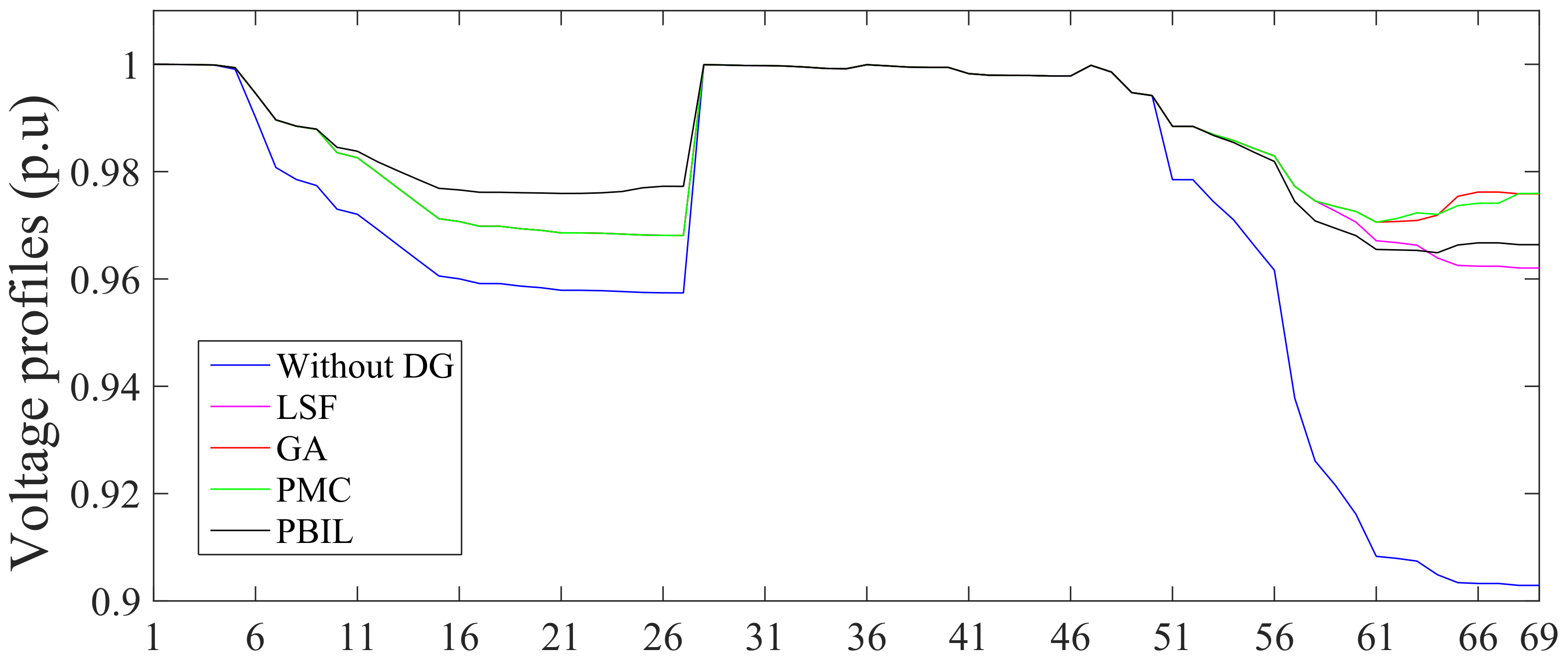
| Without DGs | —– | —– | 0.2421 | —– | 0.1379 | —– | 0.9028 | —– |
| Case 1: Location of a single DG | ||||||||
| LSF | 57 | 1.2 | 0.1482 | 38.79 | 0.0682 | 50.52 | 0.9322 | 43.35 |
| GA | 61 | 1.2 | 0.1072 | 55.70 | 0.0474 | 65.61 | 0.9493 | 1253.97 |
| PMC | 64 | 1.2 | 0,1112 | 54.07 | 0,0434 | 68.50 | 0.9512 | 953.71 |
| PPBIL | 63 | 1.2 | 0.1081 | 55.33 | 0.0460 | 66.57 | 0.9512 | 696.06 |
| Case 2: Location of two DGs | ||||||||
| LSF | 57 58 | 0.4531 1.2 | 0.1161 | 52.05 | 0.0416 | 69.80 | 0.9495 | 165.72 |
| GA | 6 62 | 0.4531 1.2 | 0.0915 | 62.20 | 0.0258 | 81.26 | 0.9512 | 4744.58 |
| PMC | 24 63 | 0.4531 1.2 | 0.0947 | 60.85 | 0.0281 | 79.57 | 0.9540 | 1878.36 |
| PPBIL | 61 65 | 1.2 0.4531 | 0.0889 | 63.25 | 0.0263 | 80.91 | 0.9681 | 1530.75 |
| Case 3: Location of three DGs | ||||||||
| LSF | 57 58 61 | 0.0041 0.4490 1.2 | 0.0914 | 62.22 | 0.0308 | 77.66 | 0.9620 | 161.77 |
| GA | 53 61 66 | 0.0001 0.9184 0.7345 | 0.0872 | 63.95 | 0.0247 | 82.08 | 0.9681 | 7511.46 |
| PMC | 63 68 69 | 1.2 0.0577 0.3954 | 0.0926 | 61.73 | 0.0253 | 81.62 | 0.9681 | 2137.64 |
| PPBIL | 26 61 66 | 0.1789 1.0532 0.4209 | 0.0869 | 64.07 | 0.0245 | 82.89 | 0.9648 | 2028.91 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grisales-Noreña, L.F.; Gonzalez Montoya, D.; Ramos-Paja, C.A. Optimal Sizing and Location of Distributed Generators Based on PBIL and PSO Techniques. Energies 2018, 11, 1018. https://doi.org/10.3390/en11041018
Grisales-Noreña LF, Gonzalez Montoya D, Ramos-Paja CA. Optimal Sizing and Location of Distributed Generators Based on PBIL and PSO Techniques. Energies. 2018; 11(4):1018. https://doi.org/10.3390/en11041018
Chicago/Turabian StyleGrisales-Noreña, Luis Fernando, Daniel Gonzalez Montoya, and Carlos Andres Ramos-Paja. 2018. "Optimal Sizing and Location of Distributed Generators Based on PBIL and PSO Techniques" Energies 11, no. 4: 1018. https://doi.org/10.3390/en11041018