1. Introduction
Wind energy is one of the most economical and mature renewable energy to be utilized in large quantities. With the ever-increasing grid-connected capacity of wind power generation, electrical generator technologies are significantly developed, including doubly fed induction generator (DFIGs) and permanent magnet synchronous generators (PMSGs). However, there are a variety of challenges and opportunities, such as the safety and stability issues of wind power systems, especially for grid-tied systems [
1].
In order to minimize the influence of the frequency discontinuity on the power system, conventional synchronous generators can adjust the rotor speed by changing the power tracking control strategy. In this circumstance, the rotor kinetic energy plays a role, DFIGs can achieve maximum wind energy capture by using the rotor side converter. However, there does not exist a relationship between the speed of the wind turbine and the frequency of the electrical grid. The existing control strategy of the wind turbine does not respond to the change in the power grid frequency. Thus, it is difficult to contribute to the inertia of the wind turbines [
2,
3]. To improve the inertia of wind turbine generators, several control methods have been reported, including the droop control, rotational speed control, pitch angle control, coordinate control, and so on [
4,
5,
6,
7]. For example, an active power control method of the wind turbine generator is required to adjust the active power at output [
8]. In general, the generator in controlled to track the changing frequency of the power system based on the droop curve between the given electromagnetic torque of the generator and the system frequency. However, the control strategy is difficult to operate effectively at low wind speeds and high wind speeds [
4]. The rotational speed of a wind turbine generator is directly controlled, which can regulate the transient power of frequency modulation in order to ensure the safe operation [
5]. The optimization algorithm is used to adjust the pitch angle of the wind turbine, which operates the machine at high speeds, regardless of the change in the frequency of the power grid. In this case, those control methods increase not only the inertia of the wind turbine generators but also its reliability during the frequency fluctuations. Due to the slow response of the pitch angle control in wind turbines, it is also difficult to accommodate large fluctuations of the frequency within a short period of time [
6]. Furthermore, the difference in the rotor’s kinetic energy between wind turbines can lead to different performance with frequency modulation during a load disturbance. Thus, a coordinating virtual inertia control strategy of each unique generator is needed [
7]. The existing control strategies can achieve the maximum power point tracking for the wind turbine generators, but suffer from low efficiency and complicated control systems.
With the rapid development of energy storage technologies, energy storage systems have become an essential part to ensure the reliable power supply of electrical power system [
9]. There are many conventional energy storage technologies available, such as water pumped storage [
10], compressed-air energy storage [
11], flywheel energy storage [
12], lead acid batteries [
13], lithium-ion battery [
14], electrochemical flow cells [
15], superconductor energy storage [
16], and super capacitor energy storage [
17]. In addition, hydrogen storage as a new energy storage technology has been developed in recent years [
18,
19,
20,
21]. This technology has advantages, such as high energy density, long service life, low operating cost, cleanness, and environmental friendliness. Furthermore, dynamic response characteristics of hydrogen storage systems are much better than traditional energy storage systems [
22,
23]. In this study, the hydrogen storage technology is applied to wind turbines for the virtual inertia control of wind farms, while maintaining the original operating state of wind power generators. The hydrogen storage technology can effectively improve the frequency stability of wind turbines, but also to ensure the maximum power point tracking of wind power to enhance the system efficiency of wind turbines.
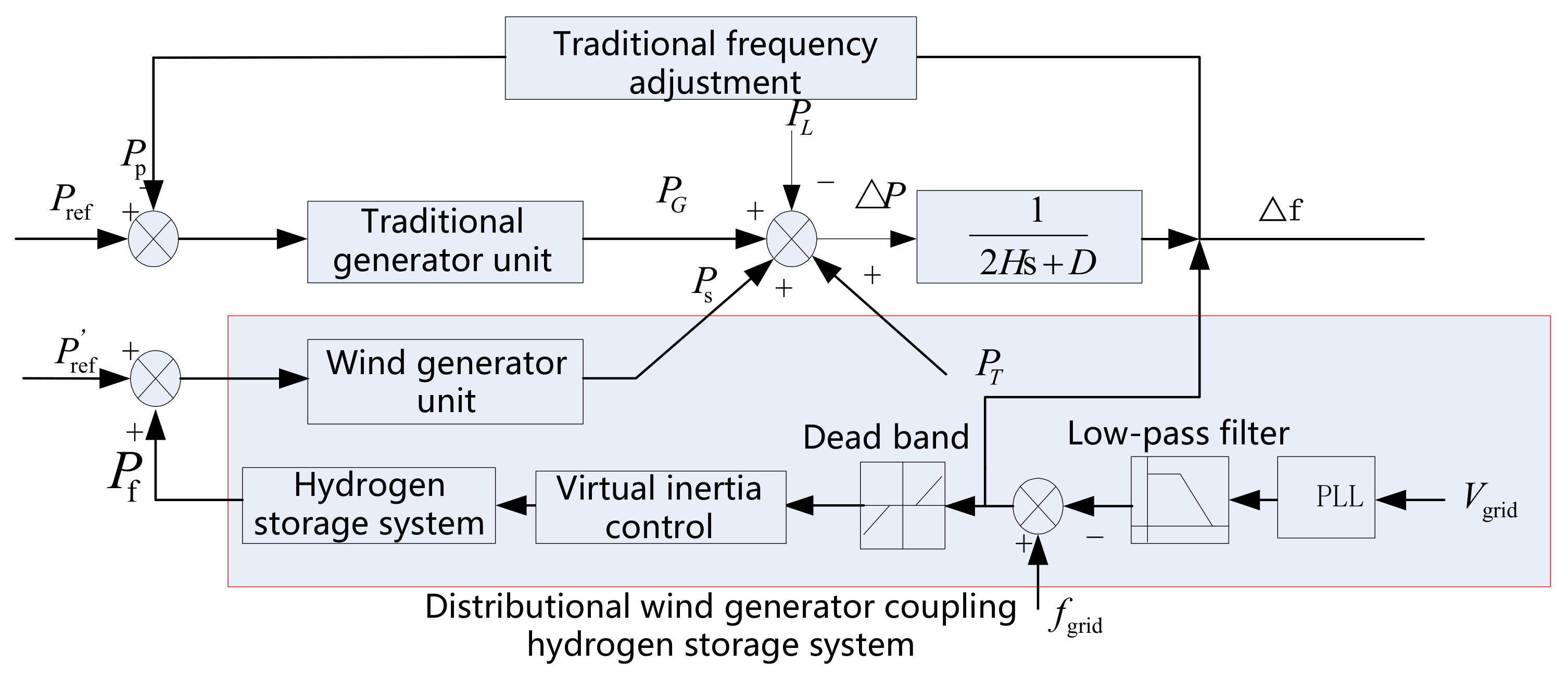
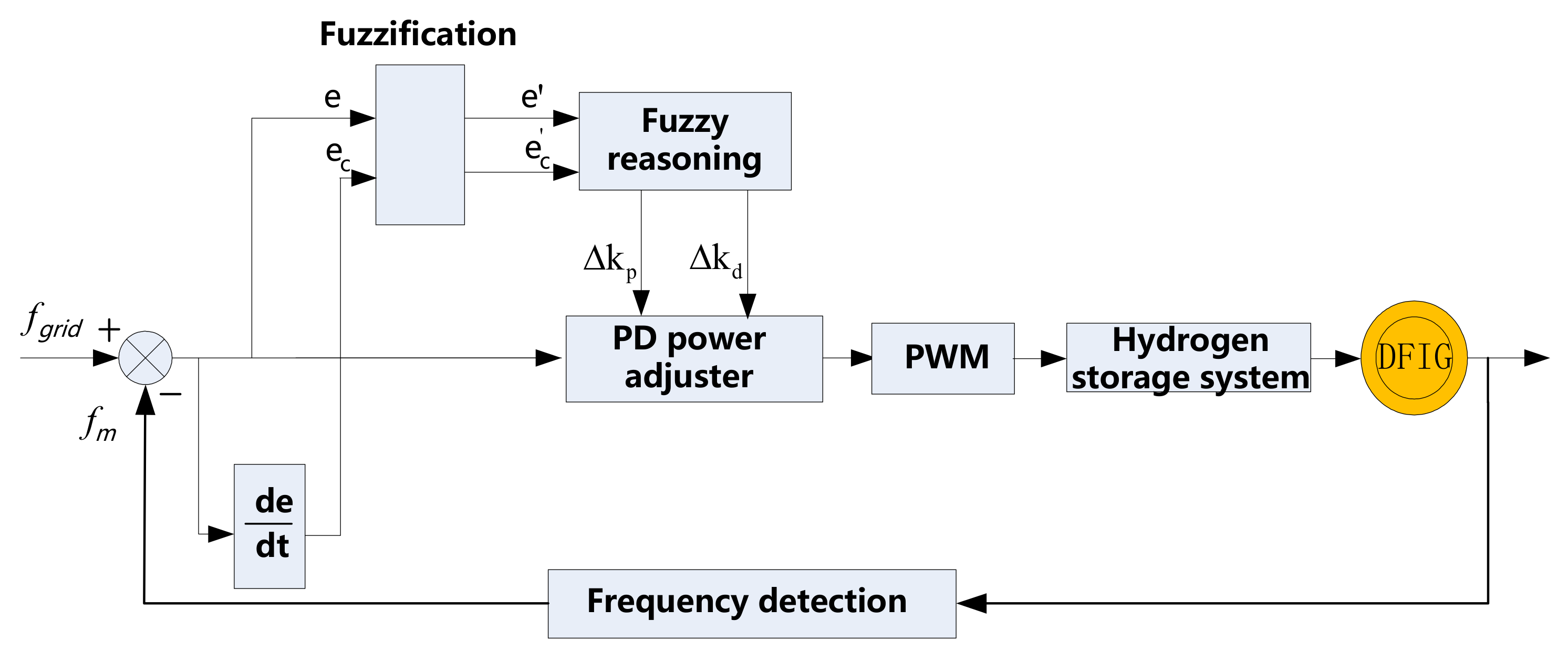
In this paper, a framework of the hydrogen energy storage coupling wind power system is firstly built. Secondly, the collocation method of hydrogen storage capacity of the coupling system is given, and the proportional-derivative (PD) charge-discharge control strategy based on the fuzzy logic and adaptive control is proposed, which is based on the optimal collocation of hydrogen storage capacity. The validation results and the analysis of the developed system is provided to prove the correctness and feasibility of the virtual inertia control method. The purpose of this paper is to verify the effective inertia support for the hybrid system and to achieve the same effect as the synchronization unit with the frequency modulation.
2. The DFIG System with Hydrogen Energy Storage
The conventional inertia control method adjusts and responds to the changes in system frequency based on kinetic energy of the machine rotor. In this work, the energy storage system is installed across the dc link of wind turbines. A hydrogen energy storage system (HESS) is developed, including a hydrogen production system and a hydrogen-oxygen fuel cell system. The electrolytic cell assembly with a hydrogen production system is equivalent to a charging device, and has a strong adaptability to intermittent wind power availability. The existing commercial products can stabilize the generator system within one millisecond and can work within the rated power range [
24,
25]. But, the fuel cell for the discharge device of the HESS has some disadvantages such as long starting time and slow dynamic response [
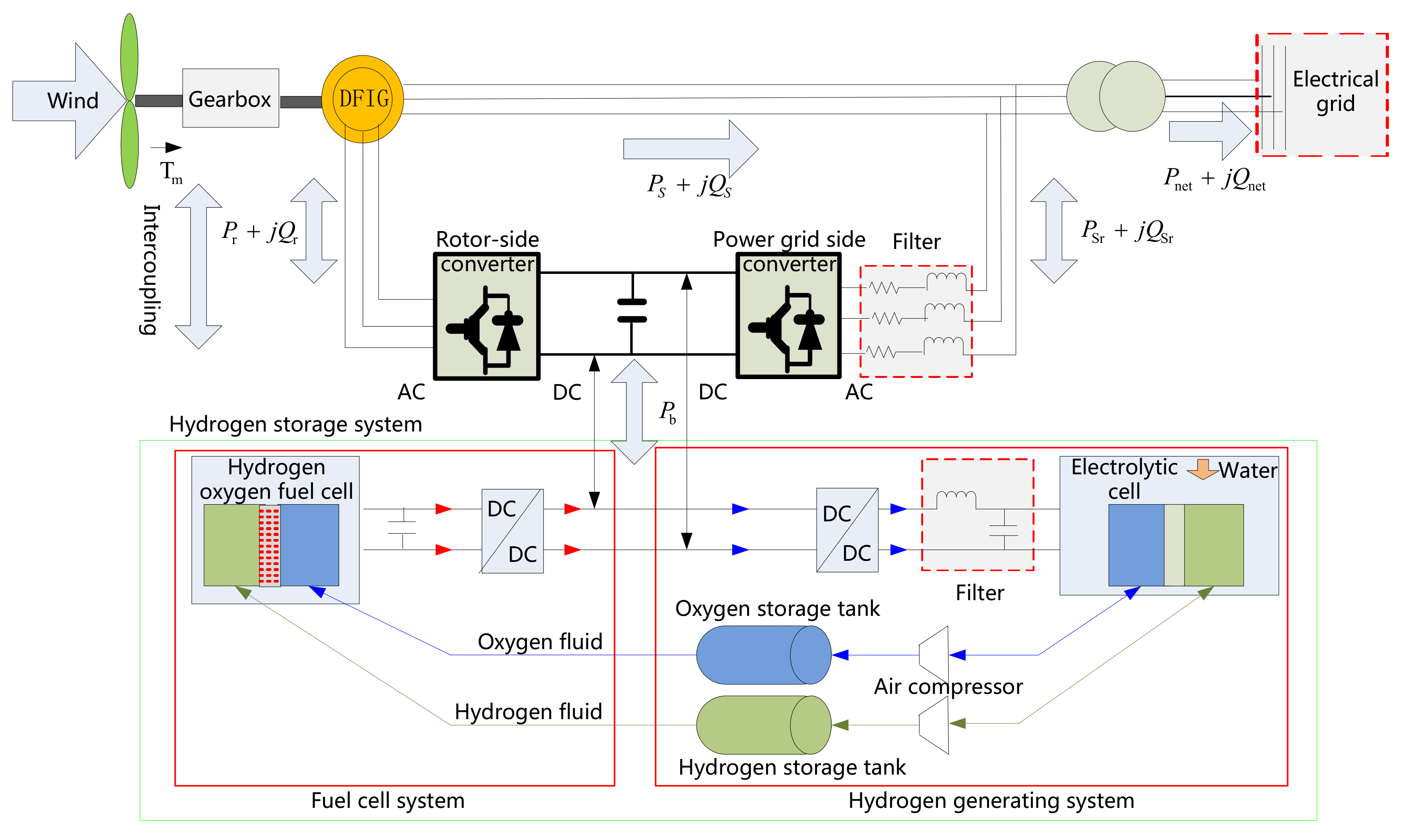
26]. A super-capacitor is then installed in the fuel cell as an energy buffer between the fuel cell and the wind system in the proposed system. This device can quickly release energy during the start-up stage to meet the power demand insufficient wind power or increased load conditions. In the low load scenario, the fuel cell provides electric power to the super-capacitor and load with rapid charging and discharging characteristics to meet the energy demand. A DFIG based wind power system with HESS is proposed in this paper, and the diagram is shown in
Figure 1. DFIGs typically operate in two states that are subject to wind speeds, and
Figure 1 illustrates the power flow under two operational states. By using the back-to-back converters, DFIGs can adjust the power flow and supply power to the grid with constant frequency. When the wind speed is low, the power converter absorbs power from the grid to establish the magnet field in the generator and the active power can be provided by the HESS. However, when the wind speed is high, the power converter can provide power to the grid. In
Figure 1,
Ps is the stator power.
Pr is the slip power of rotor.
PSr is the power that is transferred from the rotor to the electrical grid.
Pb is the electrolytic hydrogen power. There are two power unbalance statuses that are considered during the system design. The first status is load changes, such as increased load. In order to maintain the power balance of the electrical grid, the DFIG should be able to deliver energy to the electrical grid through both stator and rotor sides under the DFIG is running the super-synchronization operation state conditions. To reduce the loss of wind energy, some of the energy is transported to the HESS system by the converter to start the hydrogen electrolysis, (
Pr is the sum of
PSr and
Pb). If wind power is low, then the fuel cell of the HESS will deliver electrical power to the system (
Pr and
Pb will flow into the electrical grid through the grid-side converter). If the wind power is abundant, the active power will flow from the stator and the rotor to the grid (
PSr includes
Pr and
Pb). If the wind power is deficient, then the HESS provides the power to the rotor winding by discharging the fuel cell. In essence, the HESS acts as an energy buffer to balance the power between wind turbines and the grid.
3. System Virtual Inertia Definition and Hydrogen Storage Configuration
In modern electric power systems, the rotor inertia constant
H of the synchronous generators can be expressed as
where
Eks is the kinetic energy of the rotor at rated speed.
J is the rotational inertia of the generator. Ω
r is the rated speed of the generator.
is the rated capacity of the generator. The capability of the rapid power response and the reasonable control strategy of the storage device can make the frequency of the wind farm similar to the inertia response from synchronous generators. The average inertia of the wind energy storage system is a constant within a small period time
, such as the change rate of system frequency is unchanged the symbol [
27].
where
is the rotor inertia constant of wind farm energy storage system (WFESS);
and
are the per-unit value of system frequency at the time
and
, respectively.
is the per-unit value of the discharge power of the storage system in time
.
is the per-unit value of the extra energy of the electric element that is released time
.
The charging and discharging are two different processes. The charging process is carried out in the hydrogen production subsystem. The discharging process is proceeded in the hydrogen and oxygen fuel cell. The average generalized inertia constant in time
during the charging process is expressed as
where
is the rotor inertia constant of wind farm hydrogen energy storage system (WFHESS);
is the Faraday constant.
is the mole number per mole of water transfer electrons.
is the number of electrolytes.
The voltage and the electrolytic efficiency of the electrolytic bath of the system during the charging process can be denoted are given by [
25].
where
is the hydrogen storing rate of the hydrogen tank for a hydrogen production subsystem.
is the electrolytic cell current.
is reversible battery voltage that changes with temperature and pressure.
is the reversible battery voltage that changes with temperature and pressure.
and
are the overvoltage parameters on the electrode.
is the empirical value.
is the area of the electrode.
is the temperature of the electrolyte. The discharge part of the hydrogen storage system employs the proton exchange membrane fuel cell. The average generalised inertia constant in time
during the discharging process is
where
is the per-unit of the current of the fuel cell.
is the discharging rate of the fuel cell.
is the number of the single fuel cell.
is the thermodynamic electromotive force of the fuel cell.
is the ohmic polarization’s overvoltage.
is the equivalent overvoltage of the dynamic performance. The thermodynamic electromotive force is also called the ideal battery voltage, it is the actual voltage of the single fuel cell at the open circuit state, which can be expressed as
where
T is the operating temperature of the fuel cell battery pack. and are the partial pressure of H
2 and O
2 in the battery pack, respectively. The ohmic polarization’s overvoltage is also called the ohmic droop, which is the voltage drop due to the electrical reactance that is generated by the electrons through the bipolar plate and electrode material. The electrical reactance that is generated by the proton through the proton exchange membrane can be found by
where
zm and
zc are the equivalent membrane impedance and the impedance of protons through the proton membrane, respectively.
The virtual inertia of the DFIG is mainly related to the input and output energy of the hydrogen storage device. The virtual inertia can improve system stability. But, an unsuitable virtual inertia at different working states may also influence the stability of the system [
28,
29]. Therefore, the input and output energy of hydrogen energy storage are adjusted and the virtual inertia of the wind farm is optimized, which effectively reduces the adverse impacts of the wind on the stability of the power system frequency.
In this work, the frequency range of the power system is from 48 to 51 Hz, based on the grid operation standard [
30]. Thus, the variation range of per-unit value of the generator rotate speed is about from 0.96 to 1.02 p.u. during the frequency modulation. Consequently, the maximum rotor kinetic energy that is absorbed or released by the generator can be defined as
The electrolytic bath of the hydrogen storage system in time
is assumed that it absorbs the same energy as the generator when the frequency fluctuates. That is
When considering the frequency control, the response time is about 10 s. This may be long in the control’s perspective, but is shorter than other wind turbines [
31]. The inertia time constant is assumed to be the same as the synchronous generator, that is
. Thus, the power capacity of the electrolytic bath is expressed
where
and
are the rated power and the inertia time constant of generator, respectively. To simplify the calculation,
is the average value of the power capacity of the electrolytic bath in time
. To meet the demand of the system virtual inertia control in practical application, the power of the electrolytic bath can be increased when the frequency rises. When the frequency reduces, the proton exchange membrane fuel cell (PEMFC) device of a hydrogen storage system releases the same energy as the synchronous generator in time
. There are Equations (13) and (14):
where
is the output power.
The difference between
Emax and
Emin is equal to the energy stored in a storage tank full of gas. Hence, the capacity of hydrogen storage tank can be seen
In general, the system can provide 3 kWh electric energy hydrogen with 1 Nm
3 the volume in standard conditions, as shown in the Equation (15) [
32]. The operation time of the system and the corresponding control strategy are considered to calculate the volume at the actual case. The capacity of the oxygen storage tank is a half of the hydrogen storage tanks, based on the chemical formula for hydrogen and oxygen combustion. In addition, the capacity of storage tanks can be increased to improve the system reliability. Hence, the charging-discharging time of the hydrogen storage system is longer than the response time of the traditional generators.
When it meets the power requirements, it also can satisfy the energy requirements. When the capacity margin and the efficiency of the hydrogen storage system are considered, if the total power of the HESS is about 5% of the wind turbine rated power, the wind farm can generate the similar virtual inertia of the synchronous generators.
5. Results and Analysis
The wind turbine uses the active power to adjust the system frequency, which is different from the synchronous generators. With the ever-increasing proportion of the grid-connected wind power generators, the effects of wind farms with constant frequency controls become more and more serious [
34,
35]. In this case, when the grid-connected wind power generators have a high penetration in the power system, the issue of control is becoming more significant. To verify the effectiveness and feasibility of the proposed virtual inertia fuzzy adaptive control strategy in the actual application of the system, the model of the hybrid HESS and the grid-connected DFIG system is built under the high penetration wind power conditions. The validation data are from No. 1 wind farm of Daban City, Urumqi, China. The designed system consists of a traditional synchronous generator with 40 MW, a small wind farm with 10 MW consisting of six dual-feed wind turbines, and the impact load, etc. The HESS system in the wind farm, which has a capacity of 500 kW by the capacity calculation, and the penetration power of wind in the total system has a share of 20%. So, the proposed control method has been implemented into the HESS system and the six dual-feed wind turbines. Here, the initial value of the hydrogen storage tank is 80 kPa, and, the temperatures of electrolytic bath and the fuel cell are 25 °C. The number of the PEMFC monomer is 8000. Proton membrane uses the Nafion115 type. The element voltage of the single fuel cell is 1 V. The number of the electrolysis units is 2100. The voltage of the single electrolysis room is 2 V. The parameter settings of the single DFIG and synchronous generator can be seen in
Table 2 and
Table 3.
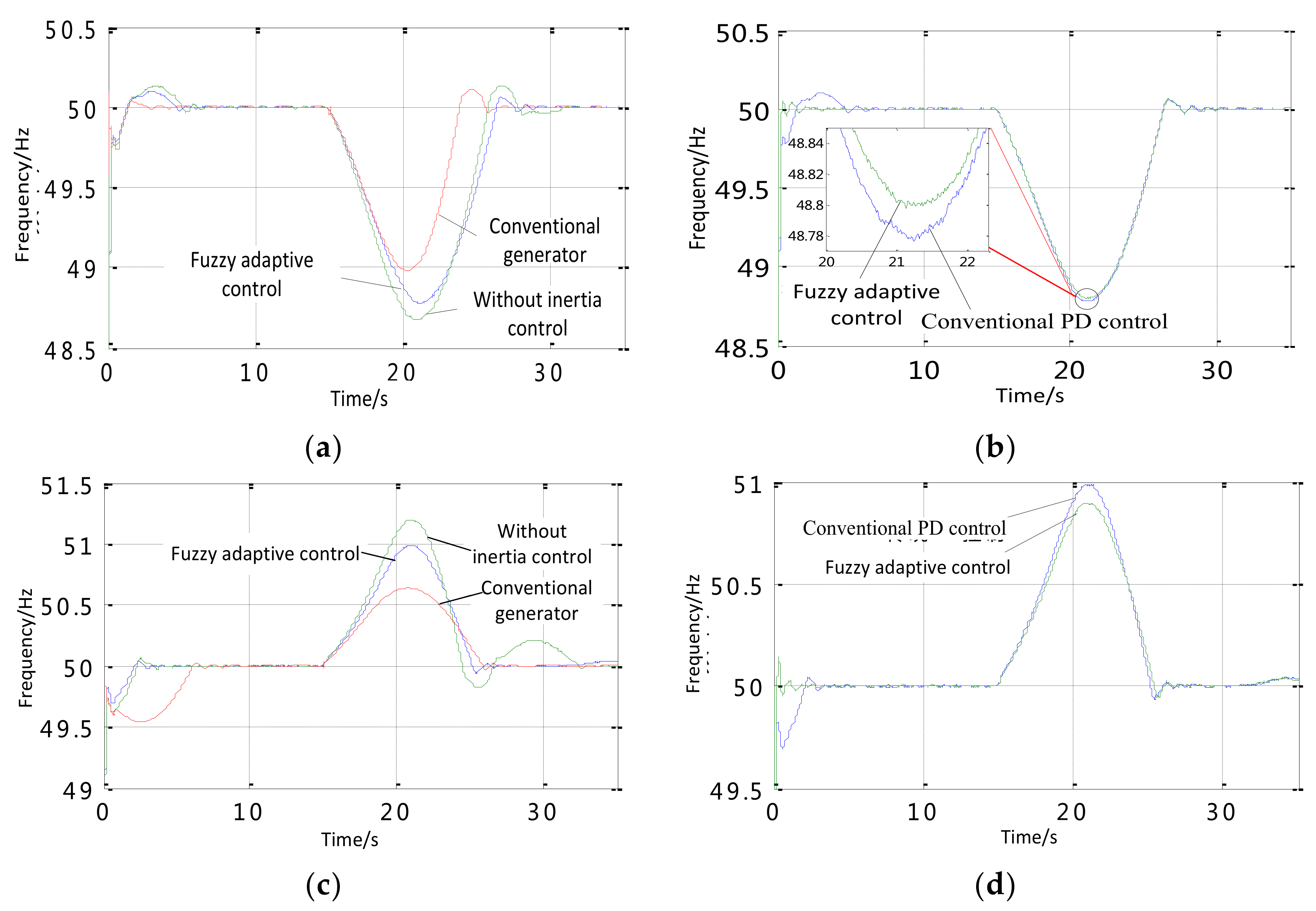
5.1. Data Analysis at the System Load Discontinuity
The system running state is normal during the period from 0 to 15 s. There is a small fluctuation in the start moment, and the frequency will be stable at the normal values in about 5 s. The active load suddenly pluses 1.5 MW in 15 s, the system frequency curves the without inertia control, fuzzy adaptive PD inertia control, and all of the conventional units supply are compared in
Figure 5.
In
Figure 5a,b, the lowest system frequency is 49 Hz and returns to normal after 13 s, when the failure traditional synchronous generator connects to the electrical grid. The lowest frequency is 48.65 Hz using the same capacity of DFIG, which drops 0.35 Hz and the drop rate has a share of 0.71% as compared with the one of the traditional synchronous motor, and returns to the normal after 17 s once the failure happens. Thus, the without inertia control will strongly affect the stability of the system frequency. When compared with the traditional synchronous generator, the difference is only 0.2 Hz, and the recovery time is approximately 13 s after the failure. The stability of the system frequency has a significant improvement by using the fuzzy adaptive PD inertia control method. When the active load of the system suddenly reduces to 1.5 MW, the comparison of the results on the same working status can be seen from
Figure 5c,d.
When the system load has a fluctuation, the frequency response has been compared by using the conventional units and the wind power generator without inertia control. The maximum frequencies without inertia control and with the traditional units are 51.25 and 50.65 Hz, respectively. The maximum frequency is 51 Hz by using the fuzzy adaptive PD control strategy, which is closer to the frequency response of the conventional generator when the same failure occurs, as shown in
Figure 5c,d.
As mentioned above, the DFIG has the inertia response by using the fuzzy adaptive PD control strategy that is proposed in this paper, it is closer the inertia result of the conventional generator units with the same capacity.
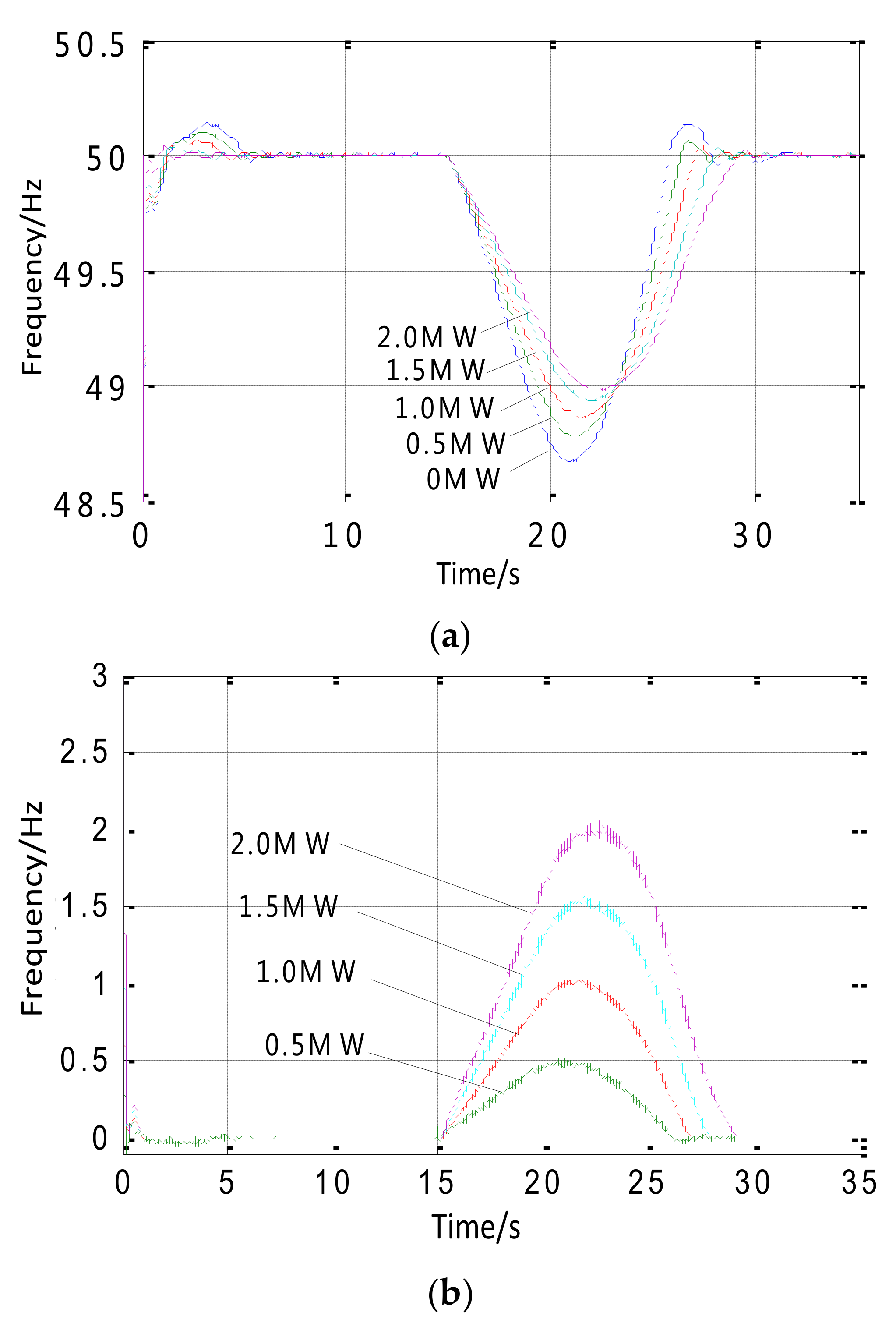
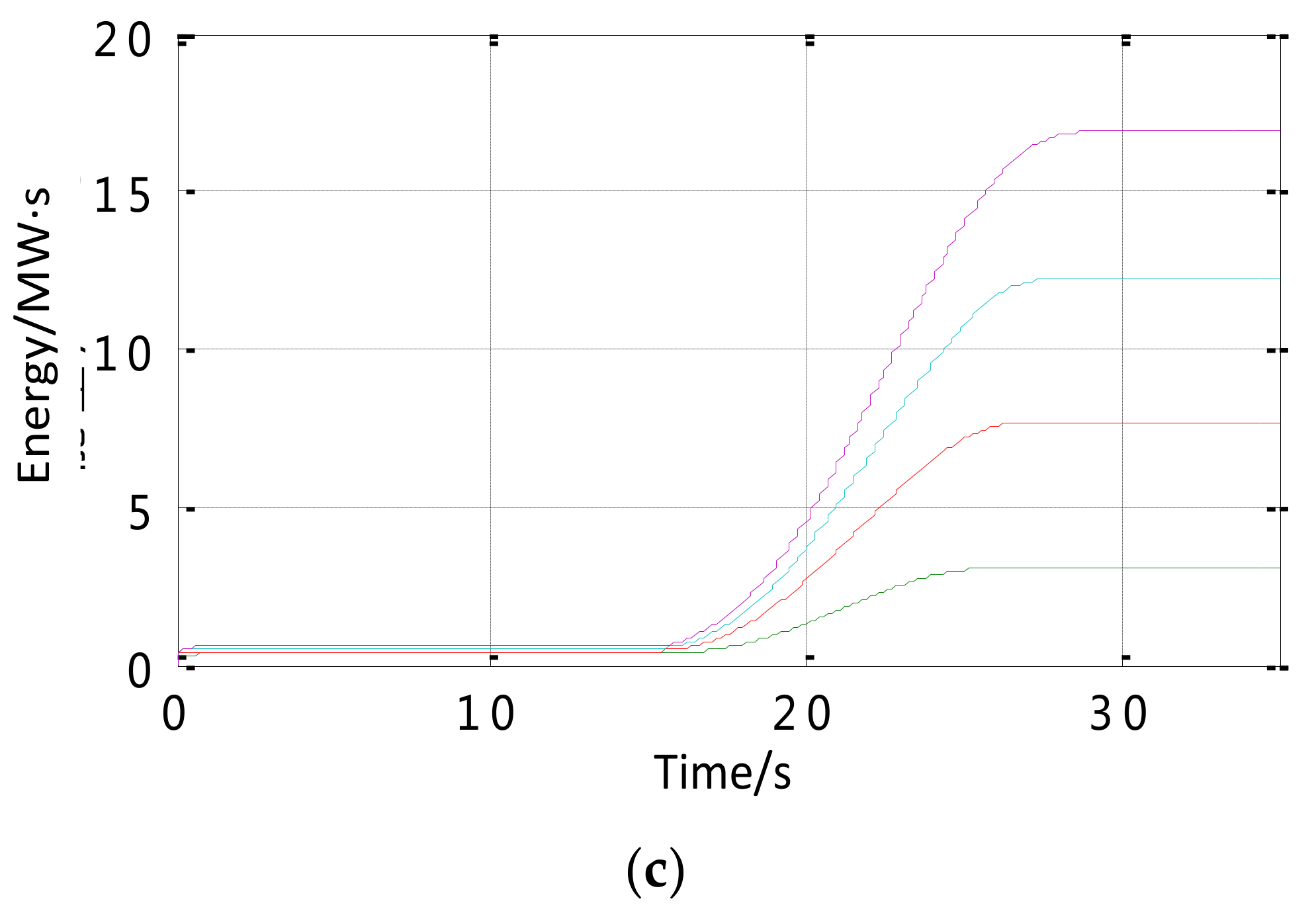
5.2. Data Analysis at Different HESS Capacity Configuration
The virtual inertia response of different HESS capacity at the sudden increase of the load is discussed in this part.
The HESS can achieve on-line monitoring of the generators’ conditions, changing rate, and variation of system frequency by using the proposed virtual inertial adaptive control strategy. The input and output powers of the HESS are directly related the virtual inertia, which has a great effect on the changing frequency of the HESS system. The virtual inertia effects are different under different HESS capacity configuration conditions. Once the capacity increases, the frequency modulation is easier to track, as can be seen in
Figure 6a. The lowest frequency falls to 49 Hz, when the HESS capacity is 2 MW. By comparing with the one without a storage system, the frequency increased by 0.35 Hz. With the capacity of the HESS increasing, there is less influence to the stability of the system frequency by comparing the effects of different energy storage configurations in
Figure 6. Specially, the virtual inertia control effect is similar to the control effect using the conventional generator when the HESS capacity configuration is 0.5 MW.
Figure 6b,c show that the HESS’s output is changing with the change of the system frequency. When the system runs for 15 s, the sudden increase of the load leads to the deterioration of the system frequency, and the HESS immediately responds to increase the power and discharge to the electrical system. When the system runs to 27 s, then the system frequency entered the recovery phase at different HESS capacity. The HESS reduces the system output and decreases the virtual inertia to ensure a quick recovery of the system frequency.
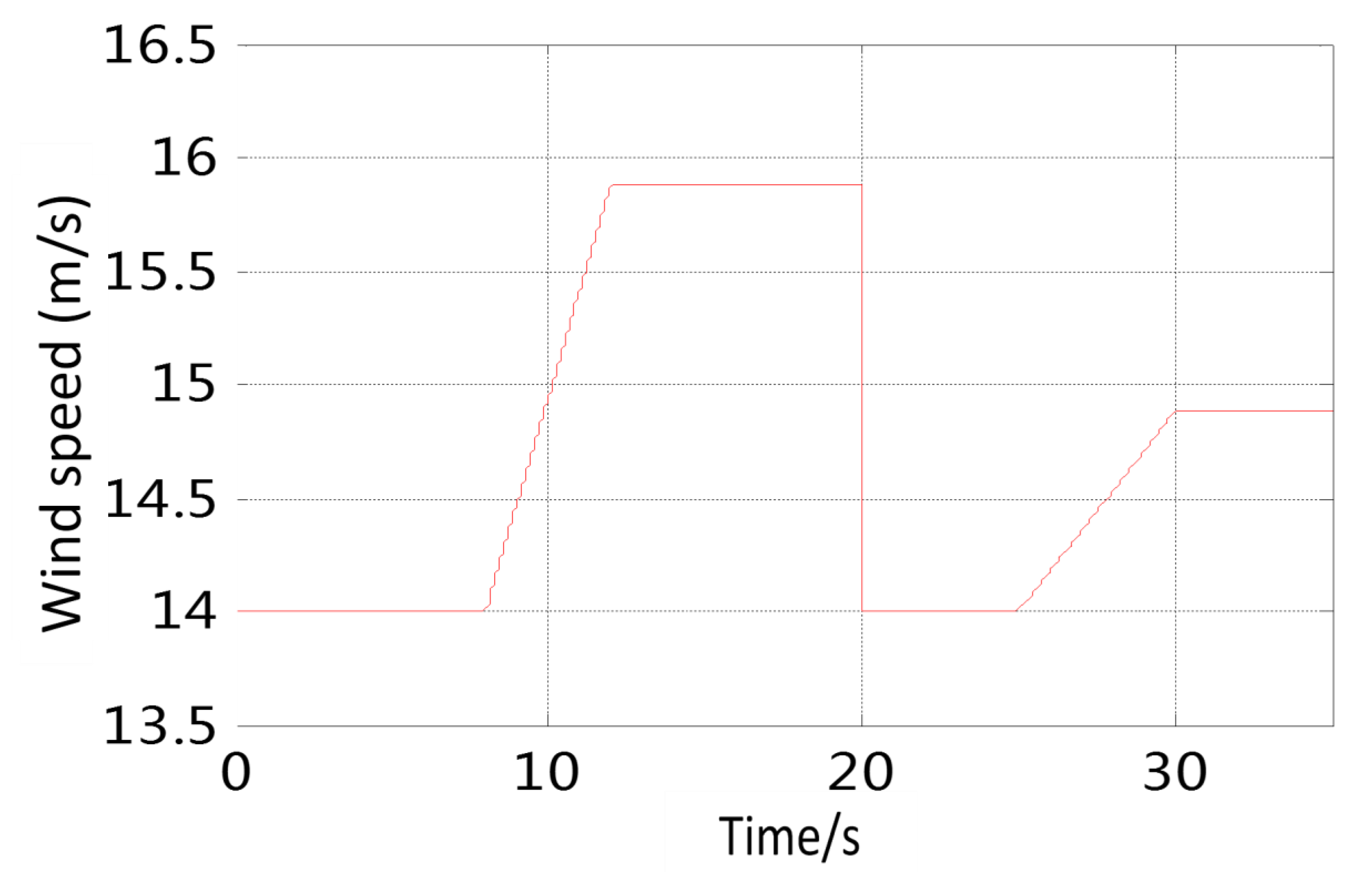
5.3. Data Analysis for the Wind Speed Fluctuations
The wind speed in the actual wind farm continuously changes, and the output power of the wind farm is fluctuant with the changing wind speed. In this case, due to variations of actual wind speeds, the system frequency produces big fluctuations and brings a great disturbance for the security and stability of the power system. The proposed system can not only play a role to restrain the wind power fluctuation, but also to reduce the change rate of frequency and improve the limit of frequency fluctuation by using the virtual inertial control strategy.
The wind speed of the wind farm in the set simulation condition are parameterized, as shown in
Figure 7a. The wind speed is constant at the value of 14 m/s from 0 to 8 s. The wind speed suddenly dropped to 14 m/s after a stable period and the wind speed was stable at 14.8 m/s after a small fluctuation.
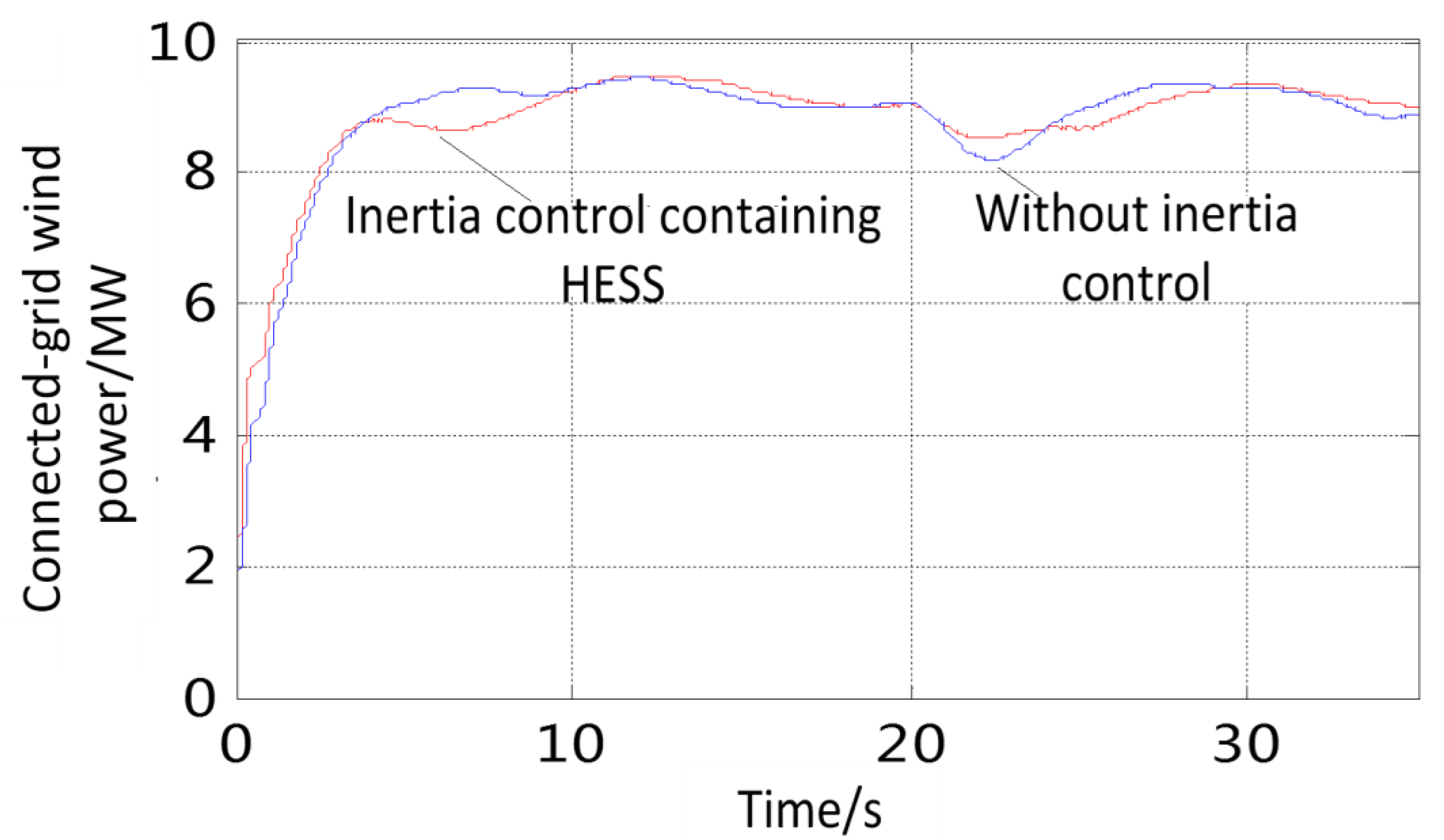
In
Figure 7b, the change curves of the developed system in different condition are illustrated. The grid-connected power of the wind power system is rising from 0 MW at initial stage, which follows the change of the wind speed. There is a big overshoot in the without virtual inertial control method. By comparing the virtual inertial control strategy, there is a reduction at the overshoot, and the wind power is closer to the rated value of 9 MW. The wind speed suddenly decreases in the middle and later stages of the wind speed, while the grid-connected power of the wind power is also descending. However, the declining speed of the wind power is slow using the virtual inertial control contains the HESS, and the final limit is smaller. With the wind speed fluctuation of the wind farm, the grid-connected power of the wind power is stable using the virtual inertial control containing the HESS, and there is only a small difference to compare with the rated value of the grid-connected wind power.
In
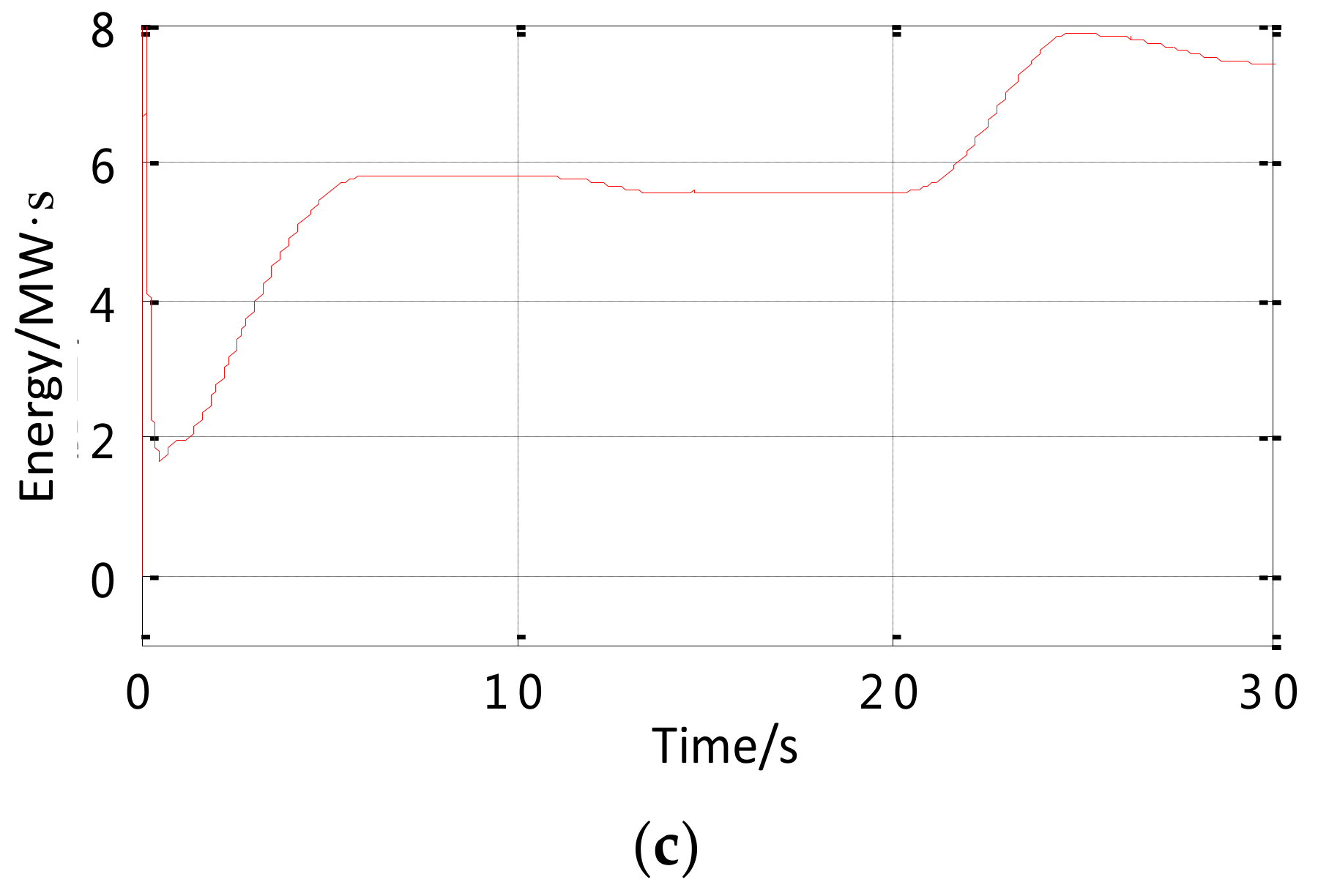
Figure 8a, the changes of wind power from the initial stage to the rated stage have a great impact on the frequency of the system. The initial stage frequency is significantly reduced after a short period of oscillation. After that, with the increasing of wind power, the frequency has an overshoot with different degrees. The grid-connected wind power stabilizes at a constant value after a sudden decrease in the middle and the later stages of the change in wind speed, and the frequency also drops and gradually stabilizes to the normal values. The frequency fluctuation range without using the inertial control is significant with the lower limit and upper limit values being 49.2 and 50.8 Hz, respectively. When the system frequency is lower than the rated value, the fuel cell device of the HESS starts to release the power, on the contrary, when the system frequency is higher than the rated value, the fuel cell device of the HESS starts to absorb the power. When the HESS capacity is 1.3 MW, the system frequency can stable in the range of plus or minus 0.2 Hz at the wind speed continuous fluctuation, which meets the requirements of the system frequency variation range of the electrical grid operation under normal conditions in
Figure 8b,c.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}