2.1. Nonlinear Problem Formulation
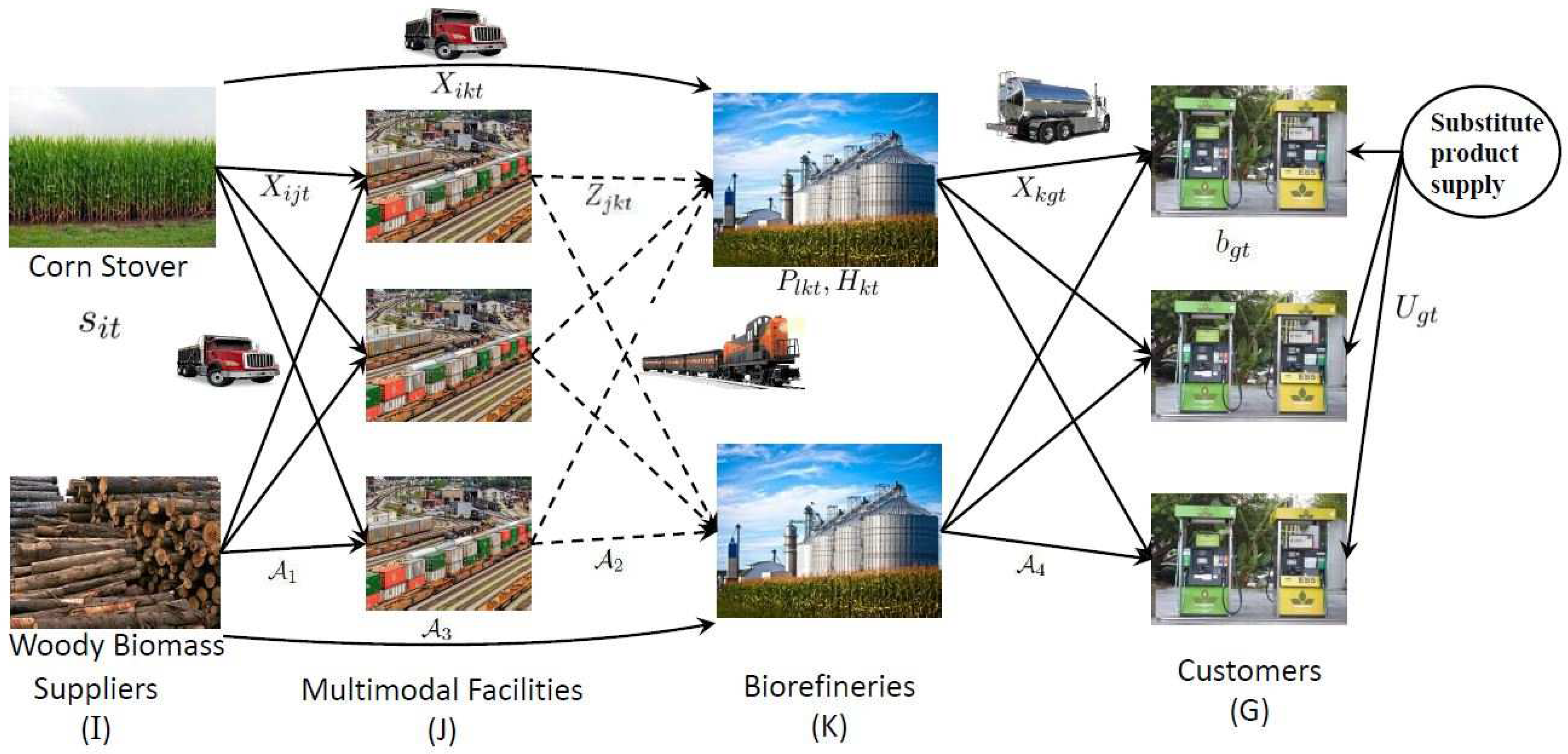
Let us denote a biofuel supply chain network , where denotes the set of nodes and denotes the set of arcs. Set consists of the set of harvesting sites , the set of candidate multi-modal facilities , the set of biorefineries , and the set of markets for biofuel i.e., . Similarly, set can be partitioned into four disjoint subsets i.e., where, represents the set of arcs connecting harvesting sites with multi-modal facilities , represents the set of arcs connecting multi-modal facilities with biorefineries , represents the set of arcs that directly connect harvesting sites with biorefineries , and represents the set of arcs connecting biorefineries with markets .
Transportation distance along arcs are relatively short; therefore, trucks are preferred to ship biomass along these arcs and its unit transportation cost is denoted by . On the other hand, transportation distance along with shipping volumes in arcs are high. Thus, transportation mode such as rail can be used to ship biomass along these arcs. Cargo containers are usually used to transport biomass between the multi-modal facilities, and the loading and unloading of biomass in the cargo container incurs a fixed cost of . The unit cost along arcs are denoted by . Therefore, the unit transportation cost along arcs can be represented by =+. We further denote as the unit truck transportation cost of biomass along arcs . These arcs are preferred when the harvesting sites are located close to the biorefineries and thus, direct shipments of biomass using trucks are considered cheaper over multi-modal facilities. Finally, trucks are used to ship biofuel along arcs by incurring a unit cost of .
Let us consider be the set of capacities for multi-modal facilities and biorefineries and be the set of time periods. In this model, we denote as the amount of biomass available at site in time and as the demand for biofuel at market in time period . The unmet biofuel demand at market in time period can be substituted by paying a unit penalty cost of . If the unit cost of delivering biofuel exceeds this threshold cost (), it will be beneficial to use substitution rather than producing biofuel at a higher cost. Locating a biorefinery of capacity at each location incurs a fixed set up cost . Similarly, using a multi-modal facility of capacity at each location in time period costs . Some other key parameters used in the model formulation are: as the conversion rate (ton/gallon) from raw biomass to biofuel; biofuel inventory holding cost , and biofuel production cost .
We assume that each facility
can disrupt independently in a given time period
. The corresponding site-dependent failure probability is denoted by
. When either multimodel facility or biorefinery disrupts, we assume that the biomass will be routed through an emergency carrier by paying an additional penalty cost which is much higher than the regular transportation cost. To capture this case, we assume that the emergency carrier will cost
times more than the regularly scheduled cost
.
Table 1 and
Table 2 summarize the notation that we use in this model. We now define the following location and allocation decision variables for our optimization problem.
The first set of decision variables
determine the size and location to use/open multi-modal facilities and biorefineries, i.e.,
The second set of variables
identifies the number of containers used between multi-modal facilities
j and
k in period
t. The remaining set of decision variables determine how to route, produce, and store the biomass in the biofuel supply chain network. Let
denote the flow of biomass through the multi-modal facilities and highways to biorefineries, and biofuel from biorefineries to the customer demand points. Variables
represent the amount of biofuel produced at biorefinery
k of size
l in period
t. Variables
represent the amount of biomass stored at biorefinery
k in period
t, and
represents the amount of unsatisfied demand in market
g in period
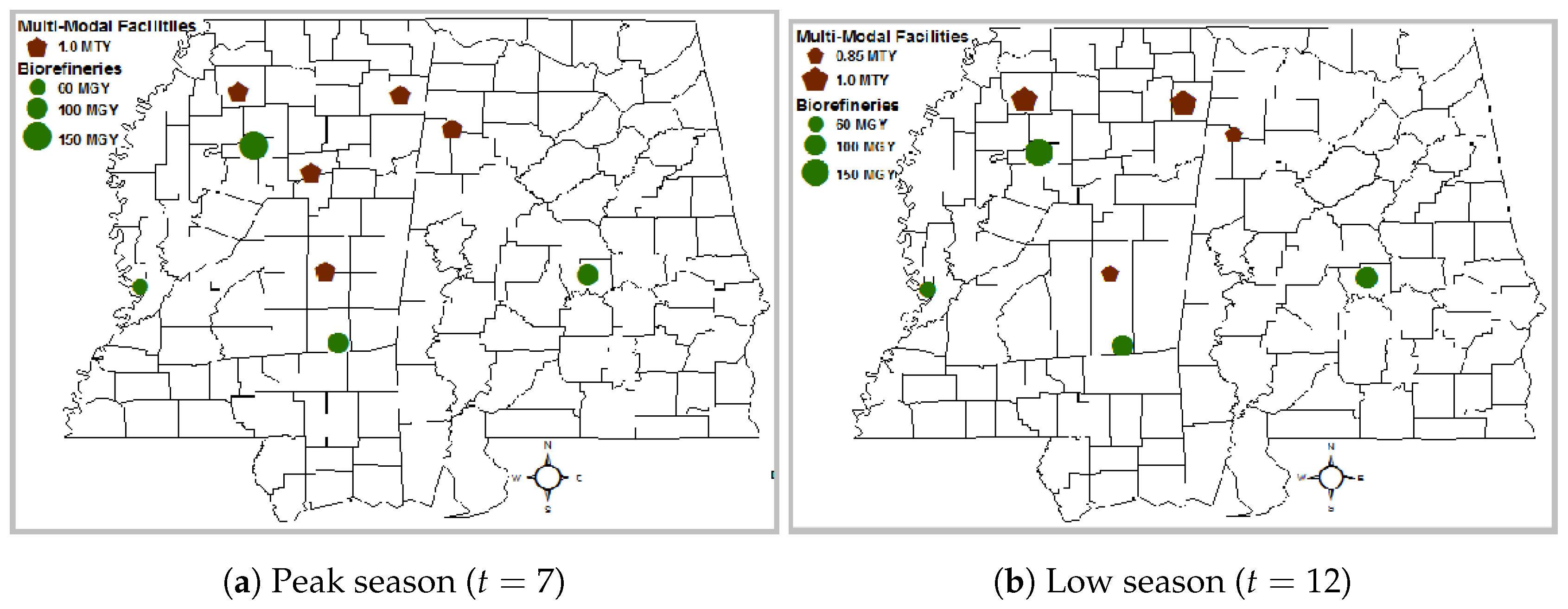
t. Multi-modal facilities are congested during the peak harvesting seasons of biomass (early September till late November). This congestion in multi-modal facility leads to a dramatic increase in the total supply chain cost. The impact of congestion on total cost becomes more severe when the total flow of feedstock
approaches the capacity
of a multi-modal facility
which is modeled here as
queuing system. Under steady-state conditions, the system-wide average waiting time for the entire network can be represented as
[
10]. Here, for a facility
, when the amount of feedstock
increases, the ratio of the equation will increase exponentially which will address the impact of congestion realistically in the model formulation. Now, considering
as the congestion factor, the system-wide congestion cost becomes
. This non-linear cost function is now added in the objective function to account for the congestion cost. The following is an Mixed-Integer Nonlinear Programming (MINLP) formulation of the problem referred to as model
.
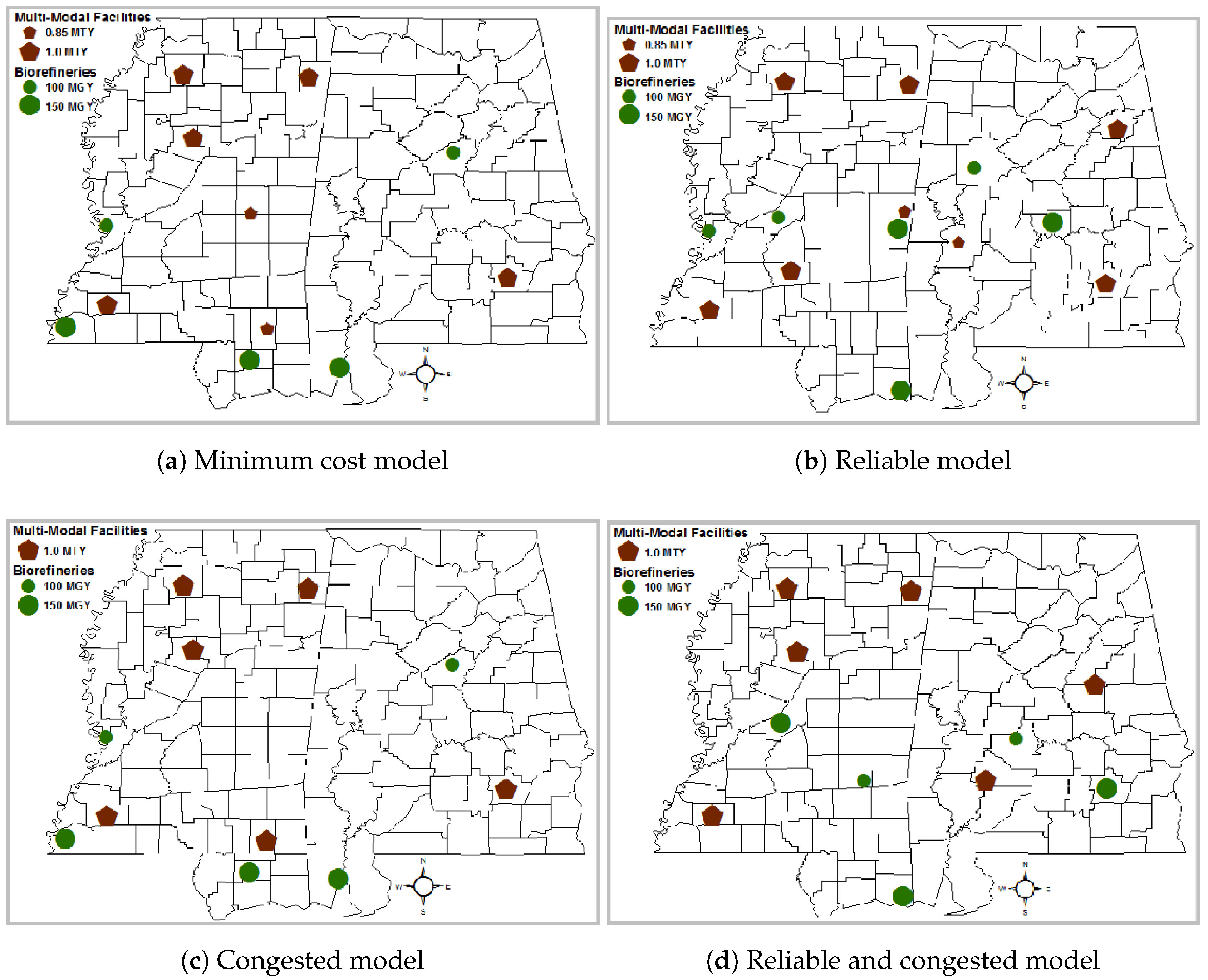
The objective function of [DR] minimizes the total expected system cost under both normal and disrupted conditions. More specifically, the first, second, and third terms represent respectively the total set-up cost of locating biorefineries, usage cost of multi-modal facilities, and the fixed cost associated with transporting cargo containers between the multi-modal facilities. The fourth and fifth terms represent the production and inventory holding cost at the biorefinieries. The sixth term is the regular transportation cost, which is weighted by , the probability that both facilities operate normally along each route . When either or both multi-modal facility and biorefinery disrupt, which occurs at a probability of , biomass will flow through that route at a higher variable cost . This is reflected by the seventh term of the objective function. The eighth term is regular transportation cost along the arc and . The ninth and tenth terms represent the congestion cost and the penalty cost for the biomass supply shortage.
Constraints (
1) indicate that the amount of biomass shipped from supplier
in period
is limited by its availability. Constraints (
2) are the flow conservation constraints at biorefineries. Constraints (
3) indicate that the amount of biofuel delivered to the market is limited by the amount produced in period
. Constraints (
4) indicate that the demand for biofuel can be fulfilled either through the distribution network or through substitute products available in the market. Constraints (
5) indicate that the total amount of biomass shipped through a multi-modal facility is limited by its capacity
. Constraints (
6) count the number of containers needed for shipping biomass on each arc
. Constraints (
7) set biofuel production capacity
limitations at a biorefinery. Constraints (
8) set biomass storage limitations
at a biorefinery. Constraints (
9) and (
10) ensure that, at most one multi-modal facility/biorefinery of capacity
is operating in a given location
. Finally, constraints (
11) and (
12) are the binary constraints, (
13) are the integer constraints, and (
14) are the standard non-negativity constraints.
2.2. Model Linearization
The objective function of model
[DR] contains a nonlinear congestion cost function. We use the technique proposed by Elhedhli and Wu [
10] to linearize this congestion term. To do this, let us now consider a new decision variable
as follows.
Equation (
15) can be further reduced as follows:
We now introduce another continuous variable
as follows:
Given that
, the above equation becomes
In the condition when
constraints (
17) forces
, which is enforced by using an additional constraints
.
Lemma 1. The function is concave in .
Proof. While differentiating the function w.r.t. , we get the first derivative, , and the second derivative, . The first derivative is positive while the second derivative is negative and it proves that the function is concave in . ☐
Lemma 1 shows that function
is concave and can be approximated by a set of tangent cutting planes as shown below [
50]
which is equivalent to
where
are the set of points used to approximate Equation (
18). The value of
is finite; therefore, the value that variable
provides is also finite. This implies that the set
should be finite. Equation (
19) is now derived from (
17) and (
18) as follows:
The linearized objective function
[LDR] for model
[DR] now becomes:
Subject to (
1)–(
4), (
6)–(
13), (
19), and

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}