Suppression Research Regarding Low-Frequency Oscillation in the Vehicle-Grid Coupling System Using Model-Based Predictive Current Control


Abstract
:1. Introduction
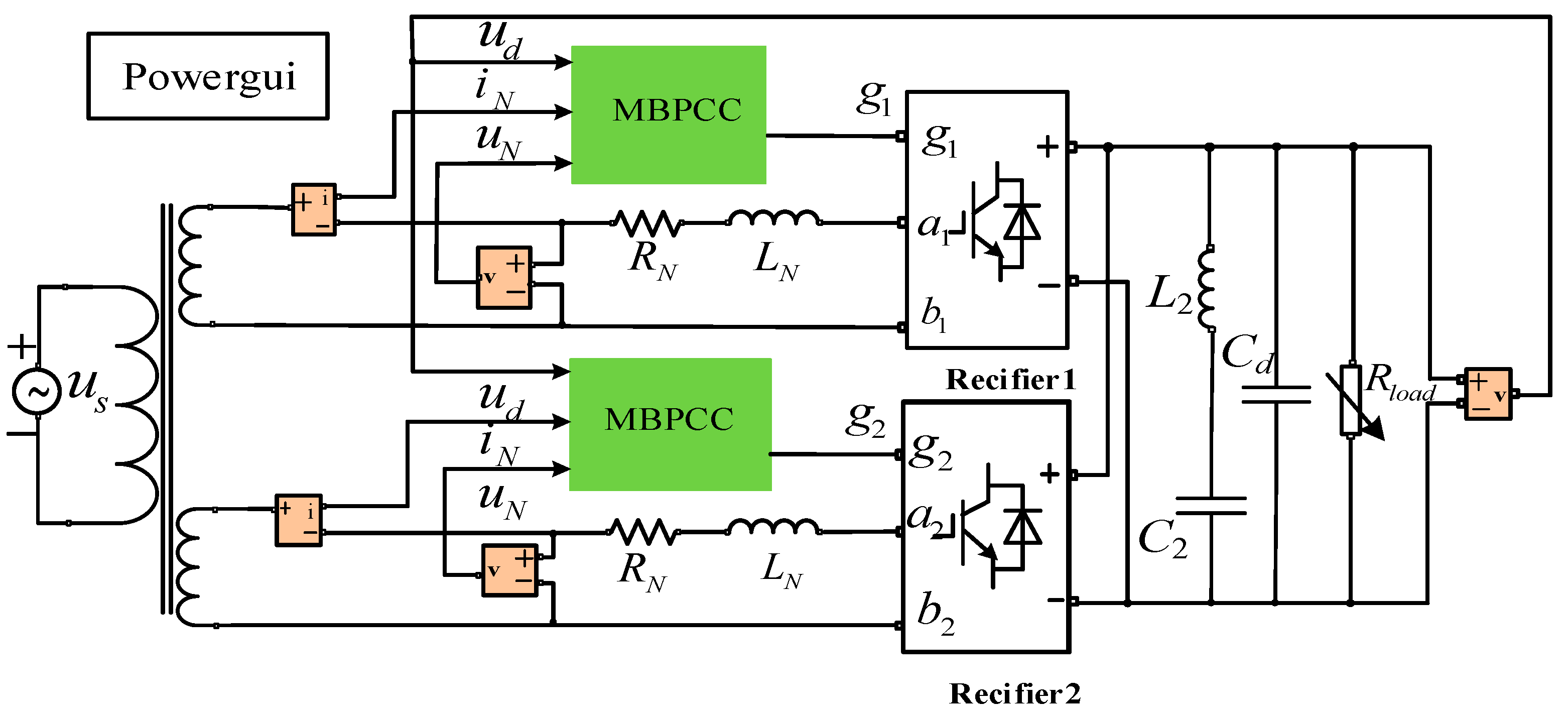
2. Model Predictive Control of One Traction Line-Side Converter of China Railway High-Speed 3 Electric Multiple Units
2.1. Mathematical Model of One Traction Line-Side Converter
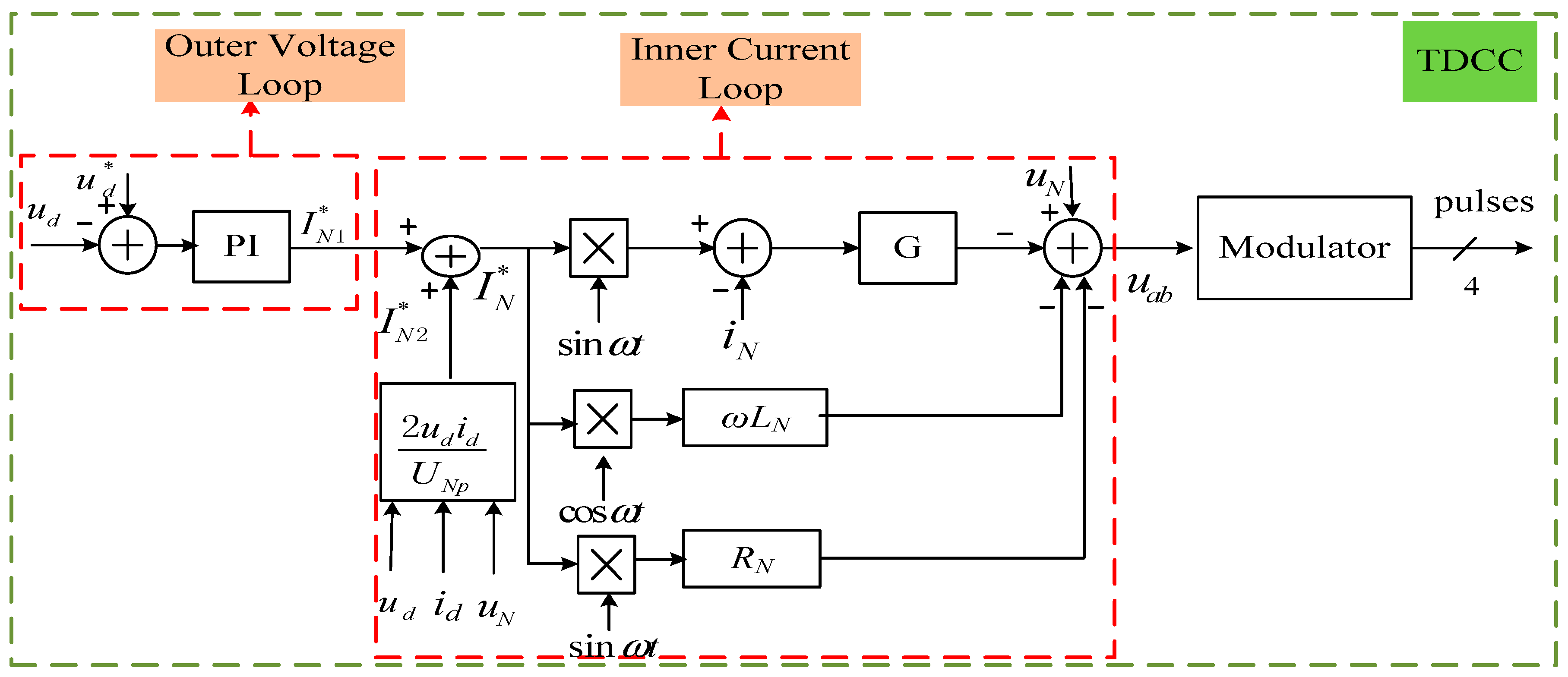
2.2. Model Predictive Control of One Traction Line-Side Converter
2.2.1. Predictive Model of One Traction Line-Side Converter
2.2.2. The Two-Step Prediction
2.2.3. The Design of Performance Function
3. Simulations of One Traction Drive Unit of Electric Multiple Units
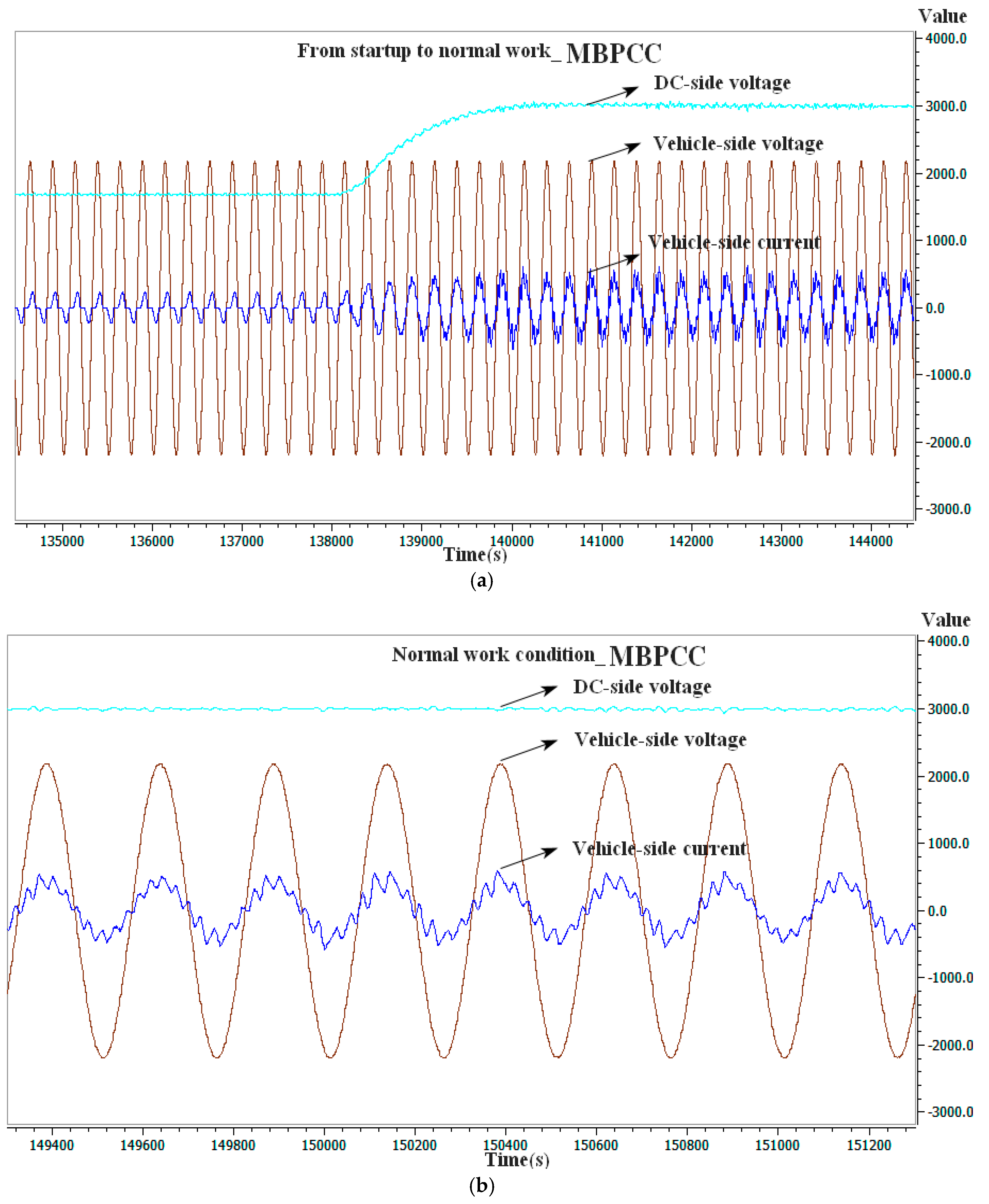
3.1. Start-Operation Process
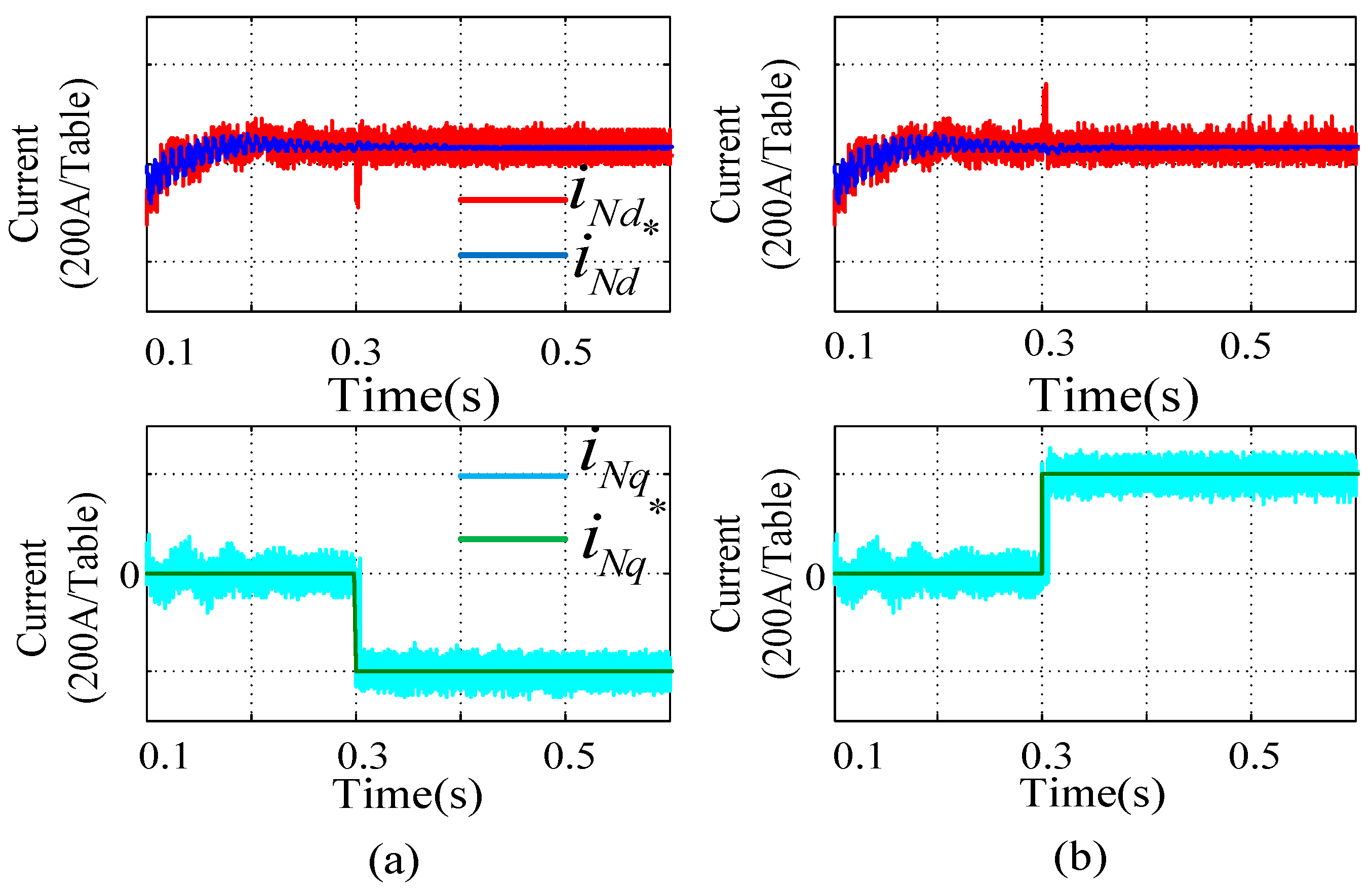
3.2. Sudden-Load-Change Process
3.3. Track Performance
4. Semi-Physical Test of Electric Multiple Units’ Dual Traction Line-Side Converter
- (1)
- Switching power supply module: the switching power supply module has the function of a power supply for the entire physical control circuit chassis.
- (2)
- SMC module: the SMC module realizes the data transmission of the physical control circuit chassis and the outside. After control program is compiled on the computer, the SMC module achieves the connection with the computer through the data cable, and control strategy is imported into the physical control circuit chassis.
- (3)
- LCC module: an LCC module contains four internal DSPs, each of which controls a single converter. A physical control circuit chassis contains three LCC modules, so it can control six dual traction LSCs.
- (4)
- APA module: the dSPACE simulation voltage and current signals are transmitted to the APA module through the analog signal channel, and the module achieves the signal acquisition of the physical control circuit chassis.
- (5)
- Pulse conversion module: the pulse conversion module outputs the digital control signal of EMUs; thus, it can realize the control for EMUs directly.
5. System Verification
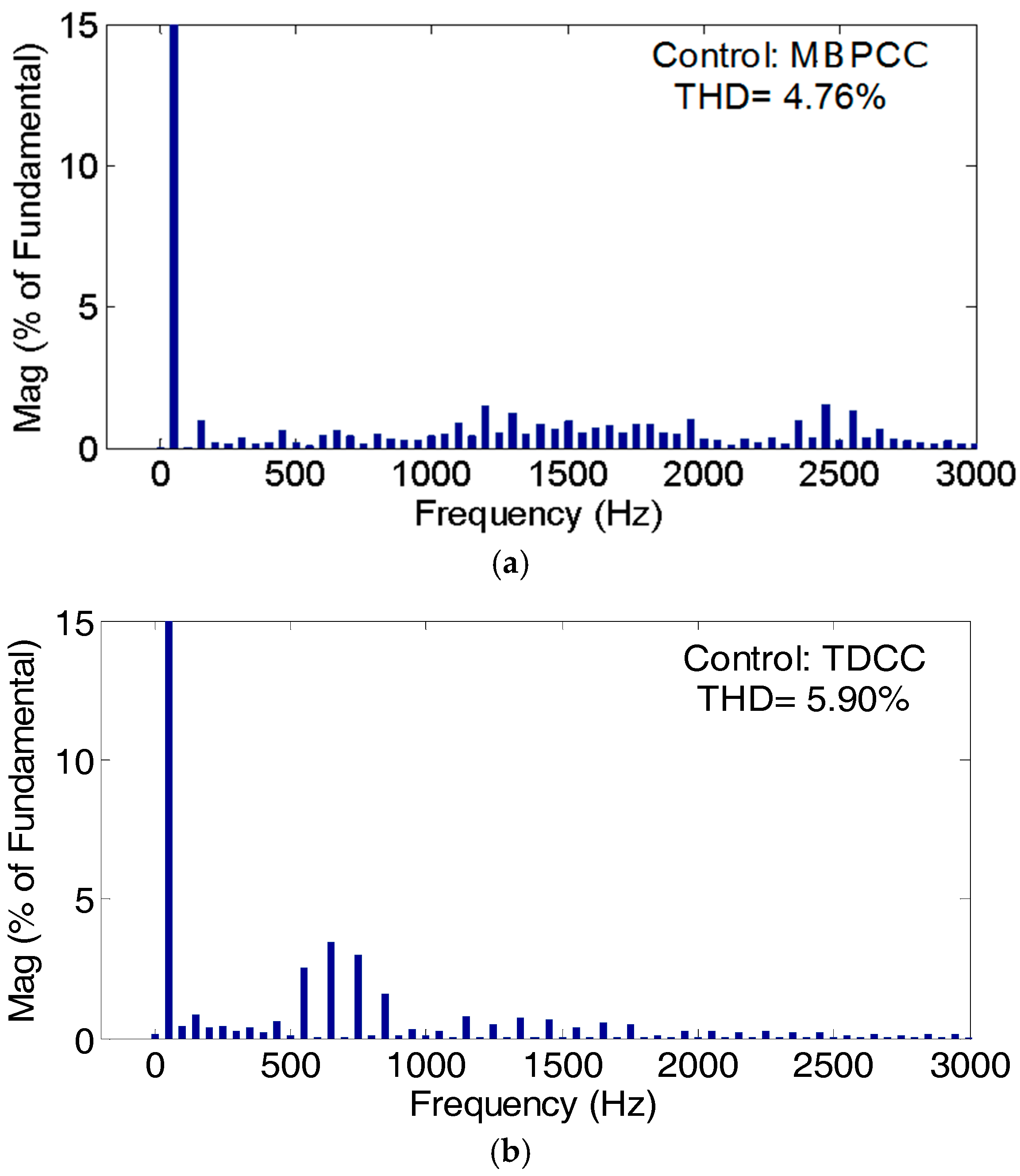
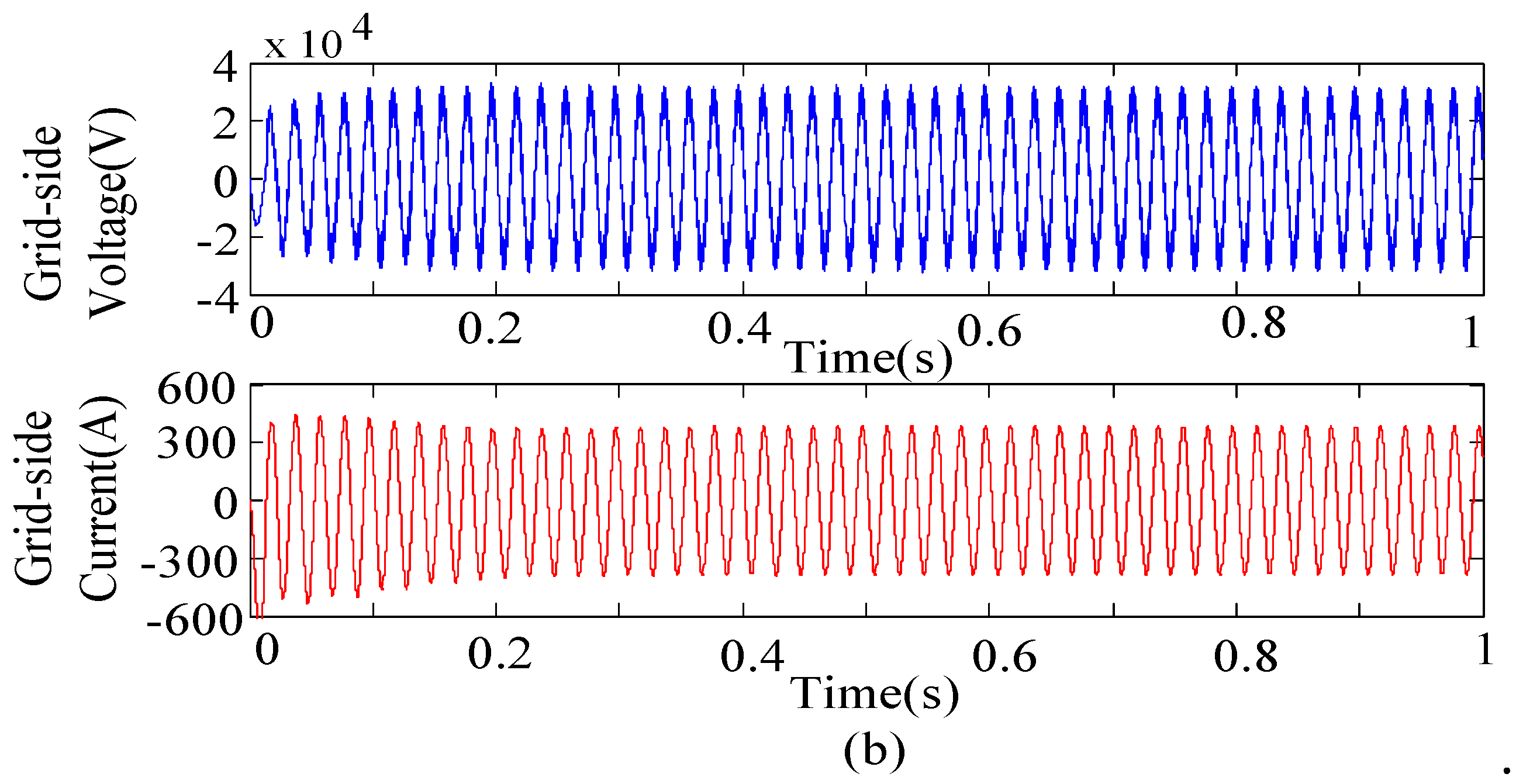
5.1. The Effect of Suppressing Low-Frequency Oscillation
5.2. Analysis of System Parameters
5.2.1. Load Resistance
5.2.2. Equivalent Leakage Inductance
5.2.3. Distance to Power Supply D
6. Conclusions
- (1)
- Simulation verifications in MATLAB of EMUs’ dual traction LSCs based on MBPCC and TDCC were implemented from three aspects. The results prove that MBPCC can obtain better dynamic and static performances, such as a smaller THD, tinier overshoot in start-operation process, greater capacity for resisting disturbance under load changing suddenly, and a better track performance.
- (2)
- Semi-physical verifications in the dSPACE semi-physical experimental platform were realized. The results certified the effectiveness of MBPCC and its superiority in real applications, when compared with TDCC.
- (3)
- When the multi-EMUs were assessed in the reduced-order model of traction network, the results showed that MBPCC can ensure the system’s stability and suppress LFO more efficiently compared with TDCC.
- (4)
- The influences of different external parameters , , and D in the vehicle-grid coupling system under MBPCC and TDCC have been discussed in detail. It could be concluded that these three parameters have a tiny impact on MBPCC, while they greatly influence the performance of TDCC. Both the oscillation pattern and oscillation peak under TDCC can be easily influenced when parameters change.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Value | Control Parameter | Value |
|---|---|---|---|
| 25 kV | 0.1 | ||
| 0.004 H | 9 | ||
| 0.06 Ω | 1 | ||
| 0.00084 H | 1 | ||
| 0.003 F | 0.0002 | ||
| 0.006 F | 0.0002 | ||
| 3000 V | -- | -- | |
| 10 Ω | -- | -- |
| System Parameter | Value | Control Parameter | Value |
|---|---|---|---|
| 25 kV | 0.1 | ||
| 0.004 H | 9 | ||
| 0.06 Ω | G | 1 | |
| 0.00084 H | -- | -- | |
| 0.003 F | -- | -- | |
| 0.006 F | -- | -- | |
| 3000 V | -- | -- | |
| 10 Ω | -- | -- |
References
- Menth, S.; Meyer, M. Low frequency power oscillation in electric railway systems. EB Elektrische Bahnen 2006, 2, 216–221. [Google Scholar]
- Eitzmann, M.; Paserba, J.; Undrill, J. Model development and stability assessment of the Amtrak 25 Hz traction system from New York to Washington DC. In Proceedings of the 1997 IEEE/ASME Joint Railroad Conference, Boston, MA, USA, 18–20 March 1997; pp. 21–28. [Google Scholar]
- Heising, C.; Fang, J.; Bartelt, R.; Staudt, V.; Steimel, A. Modelling of rotary converter in electrical railway traction power-systems for stability analysis. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 19–21 October 2010; pp. 1–6. [Google Scholar]
- Liu, Z.; Zhang, G.; Liao, Y. Stability research of high-speed railway EMUs and traction network cascade system considering impedance matching. IEEE Trans. Ind. Appl. 2016, 5, 4315–4326. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, Z.; Yao, S.; Liao, Y.; Xiang, C. Suppression of low frequency oscillation in traction network of high-speed railway based on auto disturbance rejection control. IEEE Trans. Transp. Electrif. 2016, 2, 244–245. [Google Scholar] [CrossRef]
- Liu, J.; Zheng, Y. Resonance mechanism between traction drive system of high-speed train and traction network. Trans. China Electro Tech. Soc. 2013, 4, 221–227. [Google Scholar]
- Wang, H.; Wu, M. Simulation analysis on low-frequency oscillation in traction power supply system and its suppression method. Power Syst. Technol. 2015, 4, 1088–1095. [Google Scholar]
- Heising, C.; Oettmeier, M.; Staudt, V.; Steimel, A.; Danielsen, S. Improvement of low-frequency railway power system stability using an advanced multivariable control concept. In Proceedings of the IECON, Porto, Portugal, 3–5 November 2009; pp. 560–565. [Google Scholar]
- Danielson, S.; Fosso, O.B.; Molinas, M.; Suul, J.A.; Toftevaag, T. Simplified models of a single-phase power electronic inverter for railway power system stability analysis–development and evaluation. Electr. Power Syst. Res. 2010, 2, 204–214. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Zhang, G.; Xiang, C. Vehicle-grid system modeling and stability analysis with forbidden region-based criterion. IEEE Trans. Power Electron. 2017, 5, 3499–3512. [Google Scholar] [CrossRef]
- Wang, H.; Wu, M.; San, J. Analysis of low-frequency oscillation in electric railways based on small-signal modeling of vehicle-grid system in d-q frame. IEEE Trans. Power Electron. 2015, 9, 5318–5328. [Google Scholar] [CrossRef]
- Dabra, V.; Paliwal, K.K.; Sharma, P. Optimization of photovoltaic power system: A comparative study. Prot. Control Mod. Power Syst. 2017, 2, 3. [Google Scholar] [CrossRef]
- Liu, J.; Yang, D.; Yao, W.; Fang, R.; Zhao, H.; Wang, B. PV-based virtual synchronous generator with variable inertia to enhance power system transient stability utilizing the energy storage system. Prot. Control Mod. Power Syst. 2017, 2, 429–437. [Google Scholar] [CrossRef]
- Agorreta, J.L.; Borrega, M.; López, J.; Marroyo, L. Modeling and control of N-paralleled grid-connected inverters with LCL filter coupled due to grid impedance in PV plants. IEEE Trans. Power Electron. 2011, 3, 770–785. [Google Scholar] [CrossRef]
- Hernández, J.C.; De La Cruz, J.; Vidal, P.G.; Ogayar, B. Conflicts in the distribution network protection in the presence of large photovoltaic plants: The case of ENDESA. Int. Trans. Electr. Energy Syst. 2013, 5, 669–688. [Google Scholar] [CrossRef]
- Enslin, J.H.R.; Hulshorst, W.T.J.; Atmadji, A.M.S.; Heskes, P.J.M.; Kotsopoulos, A.; Cobben, J.F.G.; Van der Sluijs, P. Harmonic interaction between large numbers of photovoltaic inverters and the distribution network. In Proceedings of the IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003; pp. 75–80. [Google Scholar]
- Wang, H.; Wu, M. Review of low-frequency oscillation in electric railways. Trans. China Electro Tech. Soc. 2015, 17, 70–78. [Google Scholar]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodríguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 12, 4312–4324. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 1, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Cheng, K.W.E. Predictive control of power electronics converters in renewable energy systems. Energies 2017, 4, 515. [Google Scholar] [CrossRef]
- Chan, R.; Kwak, S. Improved Finite-Control-Set Model Predictive Control for Cascaded H-Bridge Inverters. Energies 2018, 2, 355. [Google Scholar] [CrossRef]
- Vazquez, S.; Marquez, A.; Aguilera, R.; Quevedo, D.; Leon, J.I. Predictive optimal switching sequence direct power control for grid-connected converters. IEEE Trans. Ind. Electron. 2015, 4, 2010–2020. [Google Scholar] [CrossRef]
- Xia, C.; Liu, T.; Shi, T.; Song, Z. A simplified finite-control-set model-predictive control for power converters. IEEE Trans. Ind. Inf. 2014, 2, 991–1002. [Google Scholar]
- Aguilera, R.P.; Lezana, P.; Quevedo, D.E. Finite-control-set model predictive control with improved steady-state performance. IEEE Trans. Ind. Inf. 2013, 2, 658–667. [Google Scholar] [CrossRef]
- Song, W.; Ma, J.; Zhou, L.; Feng, X. Deadbeat predictive power control of single-phase three-level neutral point clamped converters using space-vector modulation for electric railway traction. IEEE Trans. Power Electron. 2016, 1, 721–732. [Google Scholar] [CrossRef]
- Song, W.; Deng, Z.; Feng, X. A simple model predictive power control strategy for single-Phase PWM converters with modulation function optimization. IEEE Trans. Power Electron. 2016, 7, 5279–5289. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Quevedo, D.E.; Vázquez, S.; Franquelo, L.G. Generalized predictive direct power control for ac/dc converters. In Proceedings of the 2013 IEEE ECCE Asia Downunder, Melbourne, Australia, 3–6 June 2013; pp. 1215–1220. [Google Scholar]
- Cortés, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 2, 1323–1325. [Google Scholar] [CrossRef]
- Ma, H.; Li, Y.; Zheng, Z.; Xu, L.; Wang, K. PWM rectifier using a model predictive control method in the current loop. Trans. China Electro Tech. Soc. 2014, 8, 136–141. [Google Scholar]
- Cortes, P.; Kouro, S.; La Rocca, B.; Vargas, R.; Rodriguez, J.; Leon, J.; Vazquez, S.; Franquelo, L. Guidelines for weighting factors design in model predictive control of power converters and drives. In Proceedings of the IEEE International Conference on Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar]
- Zanchetta, P. Heuristic multi-objective optimization for cost function weights selection in finite states model predictive control. In Proceedings of the 2011 Workshop on Predictive Control of Electrical Drives and Power Electronics, Munich, Germany, 14–15 October 2011; pp. 70–75. [Google Scholar]
- Leng, Y.; Yang, H.; Wang, Z. A method of suppressing low-frequency oscillation in traction network based on two-degree-of-freedom internal model control. Power Syst. Technol. 2017, 1, 258–264. [Google Scholar]
- Lee, H.M.; Lee, C.M.; Jiang, G. Harmonic analysis of the Korean high-speed railway using the eight-port representation model. IEEE Trans. Power Deliv. 2006, 2, 979–986. [Google Scholar] [CrossRef]




















| Control | Overshoot | Peak Time | Adjustment Time | Voltage Fluctuation |
|---|---|---|---|---|
| MBPCC | 3.33% | 0.10 s | 0.25 s | ±10 V |
| TDCC | 26.70% | 0.12 s | 0.40 s | ±40 V |
| Item | Value | TDCC | MBPCC | ||
|---|---|---|---|---|---|
| Oscillation Pattern | Oscillation Peak (V) | Overshoot (V) | Regulation Time (s) | ||
| (Ω) | 20 | Stable | 3600 | 3200 | 0.25 |
| 50 | Damping | [3500, 3350] | 3200 | 0.25 | |
| 75 | No | - | 3200 | 0.25 | |
| 100 | No | - | 3200 | 0.25 | |
| (H) | 0.001 | No | - | 3200 | 0.25 |
| 0.002 | Damping | [3500, 3350] | 3200 | 0.25 | |
| 0.004 | Stable | 3600 | 3200 | 0.25 | |
| 0.006 | Stable | 3700 | 3200 | 0.25 | |
| (km) | 10 | Damping | [3240, 3530] | 3200 | 0.20 |
| 20 | Damping | [3240, 3520] | 3200 | 0.20 | |
| 30 | Damping | [3300, 3520] | 3200 | 0.30 | |
| 40 | Stable | 3500 | 3300 | 0.50 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Liu, Z. Suppression Research Regarding Low-Frequency Oscillation in the Vehicle-Grid Coupling System Using Model-Based Predictive Current Control. Energies 2018, 11, 1803. https://doi.org/10.3390/en11071803
Wang Y, Liu Z. Suppression Research Regarding Low-Frequency Oscillation in the Vehicle-Grid Coupling System Using Model-Based Predictive Current Control. Energies. 2018; 11(7):1803. https://doi.org/10.3390/en11071803
Chicago/Turabian StyleWang, Yaqi, and Zhigang Liu. 2018. "Suppression Research Regarding Low-Frequency Oscillation in the Vehicle-Grid Coupling System Using Model-Based Predictive Current Control" Energies 11, no. 7: 1803. https://doi.org/10.3390/en11071803