1. Introduction
In recent years, the total electricity consumption has been increasing with the development of the economy, but the distributions of energy sources do not coordinate well with the power demands in some countries, such as China. This leads to the emergence of HVDC (high voltage direct current) transmission technology [
1]. As a major way of implementing long-distance and large-capacity power transmission, it has been developing rapidly in the recent decade. However, when the DC (direct current) blocking fault occurs, a large amount of power shortage will be generated in the receiving-end power grid, which could result in overloads in AC (alternating current) transmission lines, thus leading to cascading failures and even large-scale blackouts. Therefore, the receiving-end power grid with a large capacity DC infeed needs to be equipped with an appropriate emergency load-shedding countermeasure, in particular for such DC blocking faults.
The control process after a DC blocking fault can be divided into two stages, i.e., the transient state and quasi-steady state. Here, the quasi-steady state mainly refers to the period when the inertia response and the primary frequency response of the system coincide after the DC blocking fault. The main goal of the transient process is to maintain the stability of the system, and its corresponding reaction time is in milliseconds. The quasi-steady state aims at precisely balancing the power shortage and improving the static security of the system, whose response could be relatively slower, in seconds or minutes. At present, China has developed mature and practical countermeasures for the transient control process after a DC blocking fault, including multi-DC coordinated control, pumping storage control and designated load control, etc. [
2]. The study on the quasi-steady state stage is not as mature as the transient stage, which could obtain unified and practical countermeasures [
3,
4,
5,
6,
7,
8,
9,
10,
11]. To the best of the authors’ knowledge, little research on how to accurately solve the power deficiency in combination with the inertial effect of the system after the fault has yet been undertaken, which is one of the key focuses of this paper.
Some related research has been done as of now for the quasi-steady state control process after a DC blocking fault. An emergency load-shedding optimization model is proposed in [
3] to tackle the DC blocking fault of the multiple DC receiving-end system, in which the total load shedding is treated as the optimization objective. To minimize the load-shedding after the HVDC communication failure, a control strategy for generators is adopted in [
4]. To handle the disturbance with a large power deficiency in the interconnected AC/DC power system, an optimization model that concerns both the frequency recovery performance and minimum amount of load shedding has been proposed in [
5]. The secant method is adopted to search for the critical load of the power system to dispose of the DC blocking fault [
6]. However, it is assumed that the order of each substation with load shedding has been given, and the search process needs numerous simulations, which is time-consuming. [
7] presented a coordinated optimal dispatch strategy on emergency power support among provinces after a blocking fault of an HVDC transmission system. An optimization method for the emergency load control of the receiving-end system with a coordinated economy and voltage stability is analyzed when the DC blocking accident occurs [
8]. The optimal load-shedding scheme is obtained based on the power transfer coefficient between the DC system and the AC branch or the cutting load point, and the importance of different loads is comprehensively considered [
9]. Reference [
10] obtains instantaneous measurement data to calculate the transmission power and system frequency of AC lines at a steady state after DC blocking, after which the optimal load-shedding scheme is established and is solved via the improved swarm optimization algorithm. A sensitivity analysis based on the emergency load shedding optimization method for the DC receiving-end system is proposed in [
11], and it is solved iteratively with multi-point start technology to avoid local optimization solutions.
It can be seen that most of the above literature focuses on how to optimize the distribution of power shortage in the steady-state control process after a DC blocking fault, but the accurate determination of the actual total power shortage is an important premise for evaluating whether the load-shedding strategy is reasonable. Even though a few studies [
3,
4,
5] minimize the total load curtailment, they are not accurate enough to get the actual power deficiency without considering the inertial action of generators after the fault. In addition, the current load-shedding strategies for the DC blocking fault are almost discussed under a deterministic context; however, the volatility and randomness of the renewable energy and load in the receiving-end system should not be neglected. In order to address the above issues, an emergency load-shedding strategy of the DC blocking fault is proposed in this paper, which considers the fluctuations of renewable energy and the stochastic load with the static frequency and voltage characteristics, to accurately calculate the actual power shortage after the serious fault.
Due to the response delay after the fault, the operation state will change greatly during this period, which may lead to a sharp change in the actual load and power loss of the receiving-end system. Therefore, the actual power shortage after the DC blocking fault differs from the power lost by the DC line. The operational uncertainty [
12] of the power system is increased by the large-scale integration of renewable energy resources represented by the wind power [
13], the diversification of the power consumption equipment and the prosperity of the electricity marketization, which even leads to the uncertainty of the actual power vacancy after the DC blocking fault. The actual power shortage is the summation of the power lost by the DC block line, the change of the actual load, the power loss and the renewable generation before and after the fault, in which the first part is constant while the third part could be neglected, and in which the last part has been processed before the fault. Therefore, establishing an accurate stochastic load model that could comprehensively consider the randomness of the electricity consumption behavior [
14,
15], the relationship between the actual load and the operation state [
16], and the changes of the load compositions [
16], is the key issue for determining the actual power shortage. However, according to the authors’ best knowledge, the existing load models only consider either the uncertainty of the electricity consumption behavior, or the relationships between the actual load and the operation state, but not the combination of both, and none of these models consider the change of the load static characteristic coefficients caused by the change of the load compositions. Based on the above analysis, a stochastic load model with the static frequency and voltage characteristics is established in this paper, and some influencing factors are considered and discussed comprehensively. Meanwhile, with the introduction of this stochastic, static characteristics-dependent load model, there is a new challenge in solving the relevant problem, which needs to be overcome correspondingly.
In general, compared to the traditional emergency load-shedding strategies of the DC blocking fault in the receiving-end system, the following works are mainly done in this paper:
(1) The stochastic load model is established for the first time considering the static frequency and voltage characteristics. This proposed load model can be solved via a probabilistic power flow calculation and can be used for the DC blocking fault analysis in the receiving-end system.
(2) The inertia effect of the generator is involved in the quasi-steady state after the DC blocking fault, which enhances the effectiveness of the proposed stochastic load model and makes the determination of the actual power shortage more accurate.
(3) Probabilistic security indices to evaluate the system security under stochastic scenarios are proposed; in particular, the index for the load distribution shifting is defined for the first time to quantify the influence of the specific load-shedding strategy.
(4) The deterministic load-shedding coefficient of each load, even for different power shortages under the stochastic scenario, is unified to make it more practical.
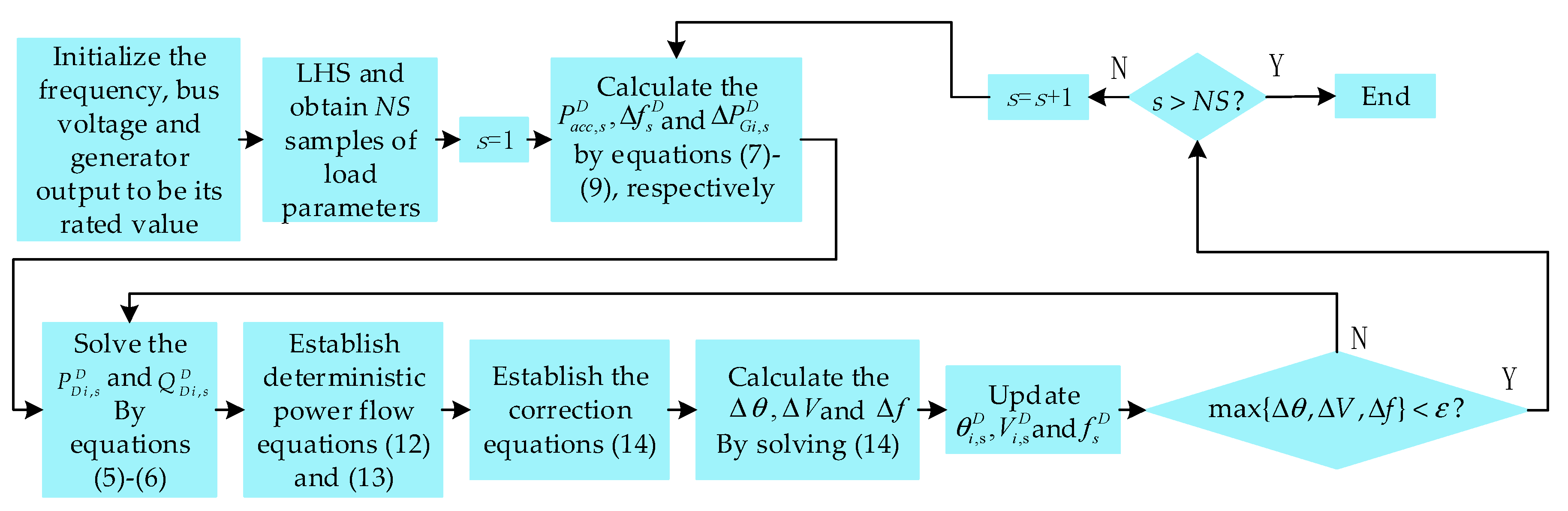
The remaining sections of this paper are organized as follows. The stochastic load model based on the static frequency and voltage characteristics is established and solved in
Section 2.
Section 3 introduces the method of load shedding after the DC blocking fault, in which the physical analysis process of the system before and after the fault, the balancing method of the power shortage and the specific solution process are considered. For case studies, the influence of different factors on the power shortage and their mechanisms are analyzed and discussed in
Section 4. Finally, the corresponding conclusions are drawn in
Section 5.
4. Case Study
The modified 39-bus New England system is selected as the test system, and the details of the relevant parameters are accessible from MATPOWER 6.0 [
24]. In order to facilitate the simulation and analysis, a few modifications have been made to the original test system, with the conventional generators at bus 36 and 37 being replaced with wind power generators and their correlation coefficient being 0.8. Bus 38 is the access point of the DC system, and its transmission power is 1000 MW. Note that the part of the power higher than the original generator output of bus 38 is distributed to each load bus by increasing its expected load at the rated condition. The maximum active power output of the generator at the swing bus is changed to 800 MW, and the maximum active power output of the traditional generator at other buses is changed to 1.05 times its original value.
The predicted wind power output may follow a normal distribution [
25] or beta distribution [
26,
27]. The mean and standard deviation are the rated value and 8% of the rated value, respectively, for the normal distribution. For the beta distribution, the wind power output is normalized according to the rated value; the corresponding shape and scale parameters are 16 and 1, separately. It is assumed that the power factor of the wind power output remains unchanged before and after the fluctuations. The parameter values of the load model are obtained from [
16], and they all followed normal distributions with their means and standard deviations, as listed in
Table 2. The rated output of the traditional generator is set at its initial value from MATPOWER 6.0. The per unit value of
of the generator at the swing bus is 18, and that of the other generators is 15. In addition, the inertia time constant
of each generator varies normally in the interval [
6,
10], and hence the specific values of the generators are shown in
Table 3. All the tests are implemented in MATLAB [
28].
4.1. Influence of Static Characteristics of Load Model on Actual Load under Normal Operation State
To illustrate the influence of the static frequency/voltage characteristics of the load and the change of the load compositions on the actual load, take the normal operation state as an example. The load models S0–S4 in
Table 4 are adopted to determine the actual load, with the fluctuations of the wind power not being taken into account. The load model S0 only considers the randomness of the rated load. On the basis of S0, the load models S1 and S2 take into account the static frequency and voltage characteristics of the load, respectively. Load model S3 considers both the static frequency and voltage characteristics of the load based on S0. Load model S4 considers the change of the load composition based on S3.
It is assumed that the standard deviation of the rated load distribution is 2% of
[
14], after which the corresponding samples can be produced by means of LHS. The distribution parameters of the actual total load as shown in
Table 5, corresponding to the load of the models S0–S4, are obtained by the method in
Section 2.2.
As can be seen from
Table 5, the actual load distributions obtained by the diverse load models are different, even at a normal operation state. The differences of the mean values for each load model are small, while the differences of the standard deviations are large. If the load distribution of model S0 is taken as the benchmark, the differences of the mean values for S1–S4 and for S0 are less than 0.026%, while the differences of the standard deviations can decrease by 20.74%. Therefore, the influence of the static characteristic parameters on the actual load distribution can be determined according to the decreasing proportion of the standard deviation compared to that of S0. When the static frequency and voltage characteristics of the load are considered separately, the differences of the standard deviations are 20.18% and 1.14%, respectively; and this value increases to 20.72% when both the static frequency and voltage characteristics are included, while the value for the load model S4 is 20.74%. This indicates that both the static frequency and voltage characteristics of the load can reduce the standard deviation of the actual load distribution, but the influence of the former is greater. Moreover, considering the static frequency and voltage characteristics of the load at the same time can further reduce the standard deviation of the actual load distribution. That is to say, under normal circumstances, the static characteristics of the load have a depressing effect on the degree of the actual load variation. In addition, the differences of the standard deviations of the actual load distributions between the load models S3 and S4 are very small, which indicates that when the operation state of the system changes a bit, the change of the load composition has little impact on the actual distribution of the load.
4.2. Influence of Parameters of Load Model and Wind Generation on the Actual Power Shortage after DC Blocking Fault
To analyze the influence of the probabilistic parameters of the load model and wind power output on the actual total power shortage after the DC block fault, different parameters are adopted. The power shortage can be obtained after the DC block fault by the load model S4 with the load parameter values in
Table 2, and the inertia effects of the generators are considered, which is regarded as the base case.
4.2.1. Influence of the Randomness of Rated Load and Wind Generation on the Power Shortage
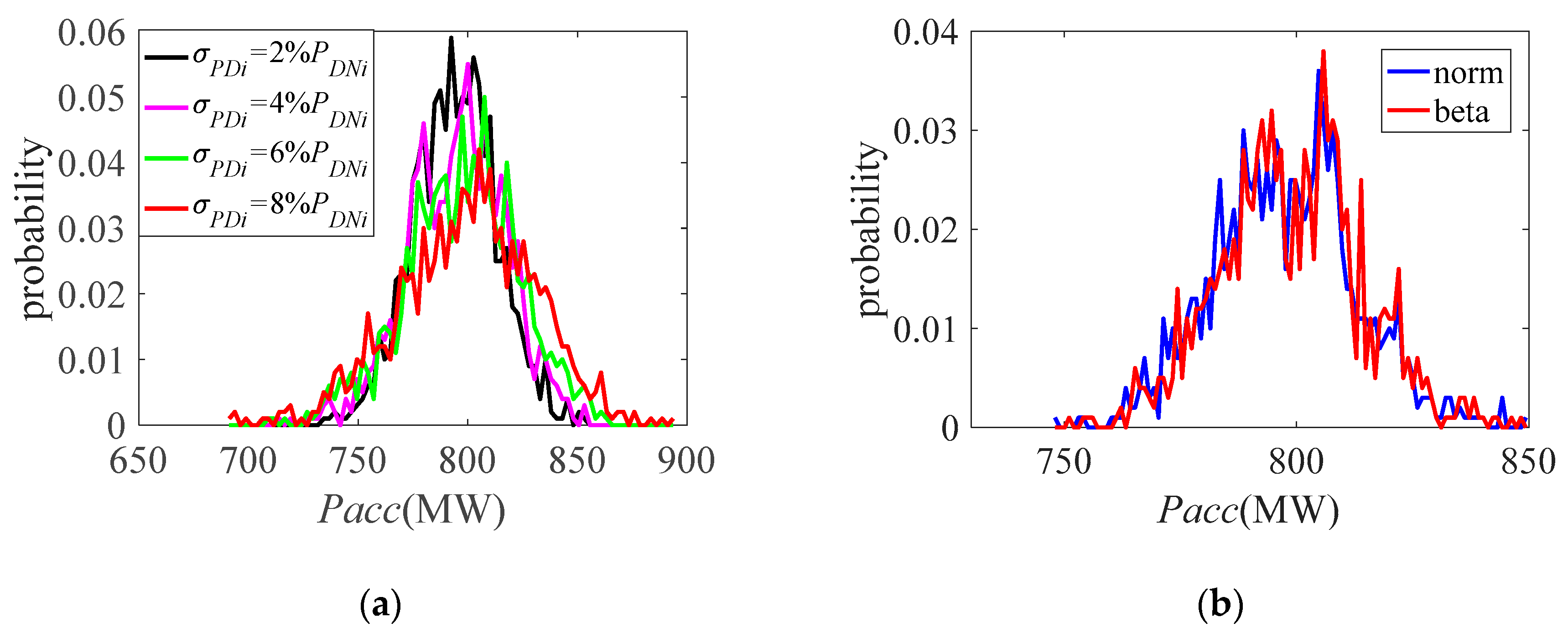
To analyze the influence of the randomness of the rated load and wind power output on the power shortage, different standard deviations of the rated load and different distributions of the wind power output are adopted. The standard deviations are set as 2%, 4%, 6% and 8% of its expected value at the rated condition, respectively; and normal and beta distributions are adopted to describe the wind power output for the latter when the other conditions are identical to the base case. The power shortage distributions are shown in
Figure 3, where
Figure 3a corresponds to the randomness of the rated load, while
Figure 3b corresponds to the randomness of the wind power output.
It can be seen from
Figure 3a that the standard deviation changes of the rated load have little impact on the actual power shortage of the system after the DC blocking fault; meanwhile, the distributions of the power shortage are almost the same in
Figure 3b, even if the distributions of the wind power output are different. In addition, the distributions of the power deficiency in
Figure 3 after the fault are all similar to the normal distributions, with mean values appearing at the vicinity of 800 MW. For
Figure 3a, the more the standard deviation of the rated load increases, the flatter the distribution curve of the power deficiency is, that is, the larger the standard deviation and range of the power deficiency distribution are. Generally, the disturbances of the power system, namely the fluctuations of the wind power and rated load, have a slight impact on the power shortage distributions after the DC blocking fault, which can be explained by the fact that these disturbances have been dealt with before the DC blocking fault. Therefore, the system disturbances can only change the operation state before the fault, so that the effects of the system disturbances on the power shortage are negligible compared with the one caused directly by the DC blocking fault.
4.2.2. Influences Arising from Static Characteristics of Load on the Power Shortage
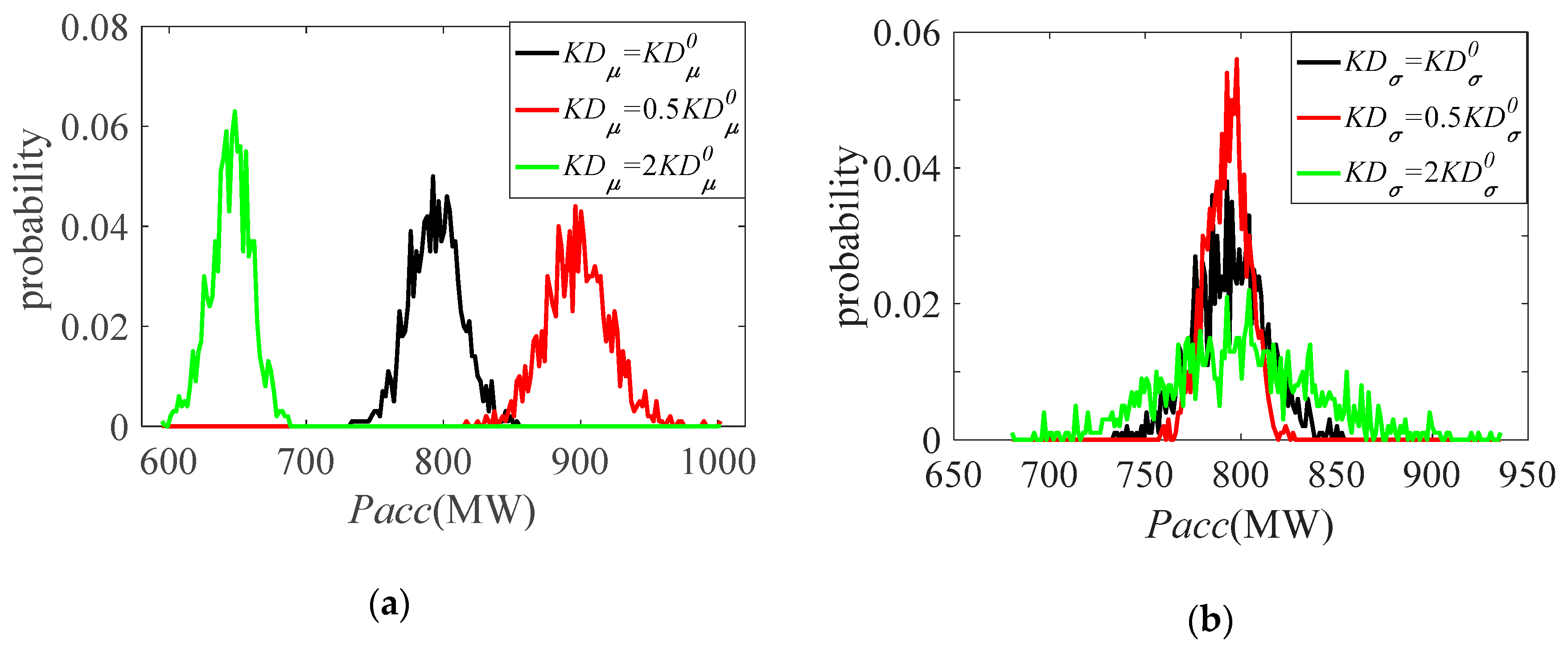
To illustrate the influences of the load static characteristics on the power shortage after the DC blocking fault, the load parameters
,
,
and
are changed, after which the power shortage after the fault can be determined correspondingly. In this paper, the mean and standard deviation sets of the load parameters are denoted as
and
, respectively, which can be represented by Equations (33) and (34), and they are set as 0.5 and 2 times the original values separately to analyze their impact on the power shortage:
It can be seen from
Figure 4 that the variation of the load parameters will lead to the distribution change of the power shortage after the fault. The smaller the expectation and standard deviation of the power shortage are, the larger the
after the fault is. When the
varies, the expected value of the power shortage after the fault is almost the same, while the standard deviation of the power shortage increases with the
. The system frequency and the bus voltage will drop after the DC blocking fault, and hence the actual load will decrease, as seen in Equation (5) of the load model, which results in the actual power shortage being lower than the power lost by the DC line. The larger the
is, the larger the actual load varies with the operation state of the system; consequently, the smaller the actual load and the expectation of the power shortage are after DC blocking. The larger the
is, the larger the interval corresponding to the actual load distribution is, and the larger the interval and variance corresponding to the actual power shortage distribution are. By comparing the power shortage distribution in
Figure 4a,b, the influence of the changes in
on the power shortage distribution is more significant than that of
. In general, the changes of
and
are achieved according to the distribution of the load parameters, hence determining the actual distribution of the total system load and power shortage after the fault.
4.2.3. Comparison of the Effect of the Randomness of Rated Load and Static Characteristics on Actual Power Shortage
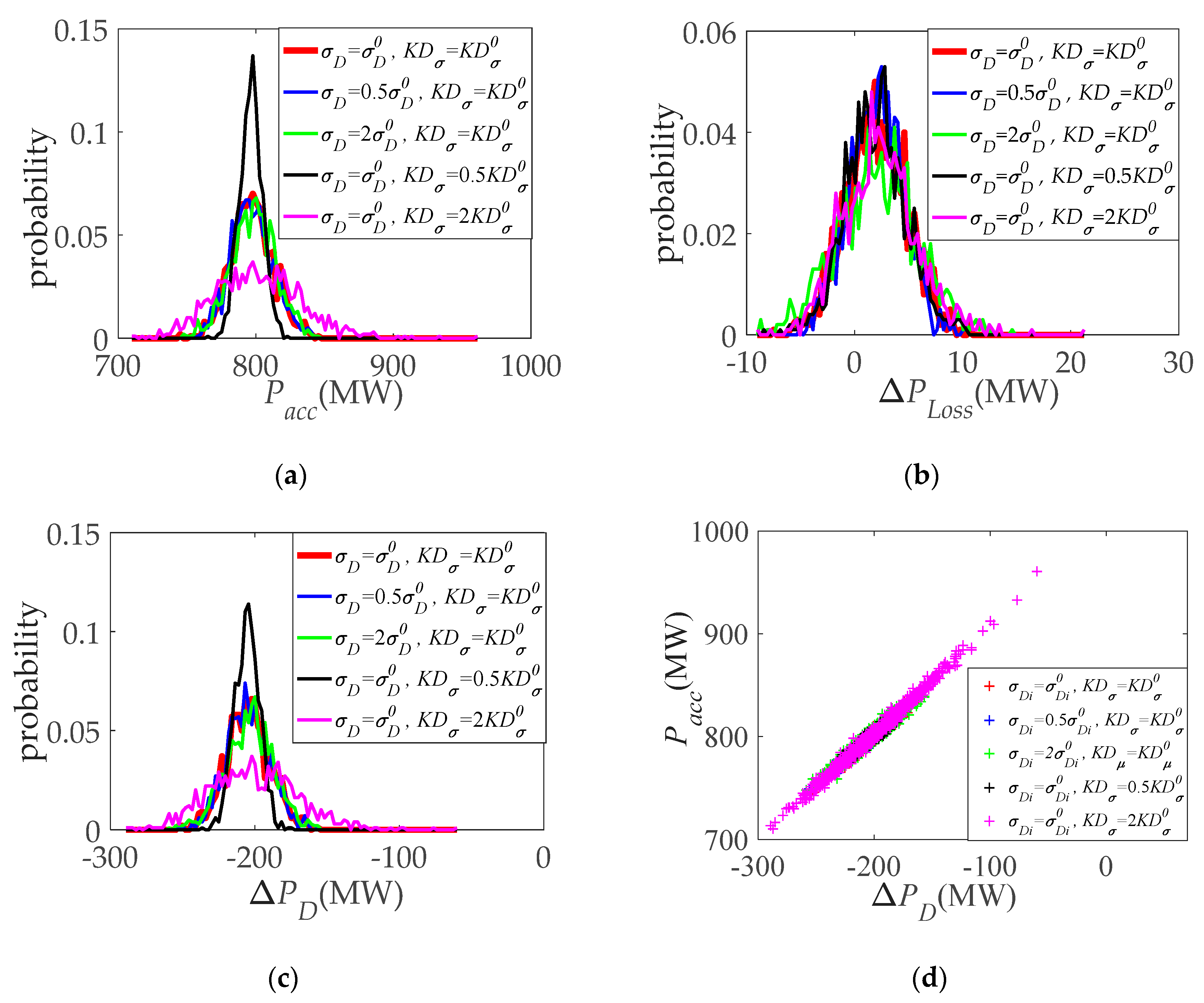
To compare the influences of the randomness of the rated load and load static characteristics on the power shortage after the DC blocking fault,
Figure 5a shows the distributions of the power shortage with different
and
values. It is assumed that
and
represent the standard deviation set and the original standard deviation set of the rated load in the power system, respectively.
It can be seen from
Figure 5a that the changes of
have a greater impact on the power shortage than the changes of
do, which is consistent with the conclusions obtained by combining
Figure 3a and
Figure 4b. The actual power deficiency after the fault is mainly related to the power lost by the DC line, the change of the power loss and the actual load before and after the fault via Equation (22). The power lost by the DC line is a determined value in this paper. Therefore, to further analyze the influences of
and
on the actual power shortage, their influences on the change of the system power loss and on the actual load before and after the fault are analyzed separately, as shown in
Figure 5b,c, respectively.
As can be seen from
Figure 5b, the change of the power loss with different
and
values before and after the fault is negligible compared to the power lost by the DC blocking fault. The change of
has a greater impact on the actual load variation than the change of
does, as shown in
Figure 5c. This indicates that the actual power shortage after the DC blocking is mainly related to the change of the actual load, except for the power lost by the DC line itself. This conclusion can be further proven by the approximate linear relation between the actual power shortage and the change of the actual load in
Figure 5d, regardless of test scenarios. The static characteristics of the load are directly related to the load variation. Therefore, in order to obtain the accurate estimation of the actual power shortage, the values of the load parameters in the load model need to be exactly determined.
4.3. Influence of Inertia Effect on Actual Power Shortage
The power shortage after the fault is immediately balanced if the inertia effect of the generator is neglected, and in this condition the power shortage is just the power lost by the DC line, which is 1000 MW in this paper. The power shortage distribution of the system after the fault is shown in the black curve of
Figure 4, taking into account the inertia effect. The role of the inertia effect of the generator is to calculate the operation state accurately, before the response of the generator and the load-shedding device after the fault, so as to accurately estimate the power deficiency. The power deficiency of the system after the fault is determined by Equation (16). The output of the generator at the inertia effect stage is the same as that before the fault, and the power loss will not change greatly in the system state, as shown in
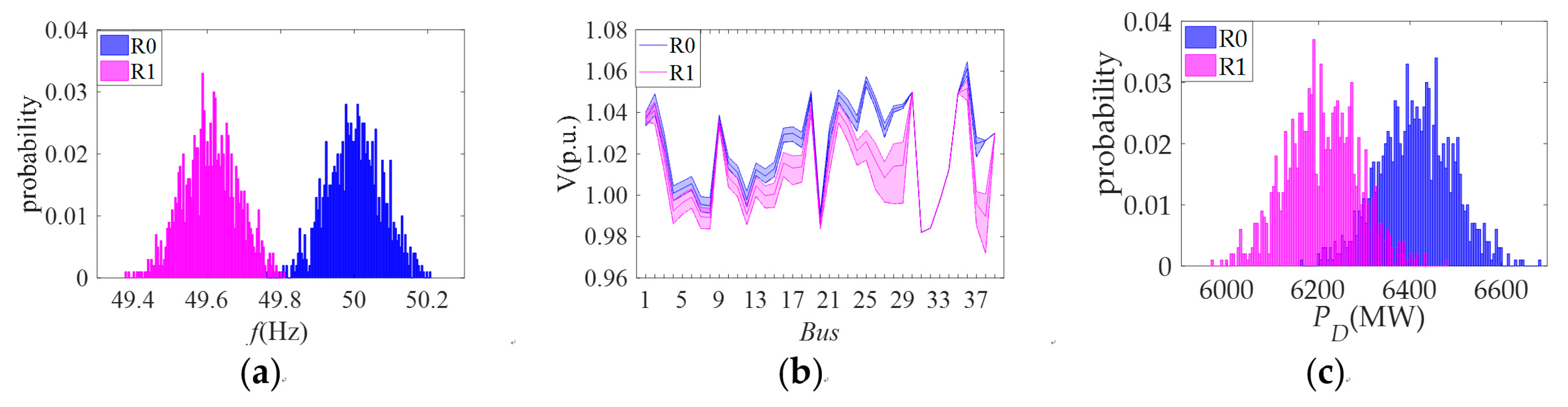
Figure 5b; consequently, the solution of the power shortage mainly focuses on the accurate solution of the actual load after the fault. To illustrate the role of the inertia effect of the generator in accurately solving the power shortage after the fault, the distributions of the frequency, bus voltage and actual load are calculated, respectively, regardless of whether the inertia effect is considered or not, and their distributions are shown in
Figure 6.
The system frequency and bus voltage after the fault are the same as before the fault when the inertia effect is not considered, corresponding to R0 in
Figure 6a,b. When the inertia effect of the generator is taken into account, the frequency and the voltage magnitude of
PQ bus decrease, corresponding to R1 in
Figure 6a,b.
Figure 6c shows that there is a significant difference in the actual load, when the inertia effect of the generator is taken into account after the fault, which is closely related to the change of the system operation state and is consistent with the results in
Figure 6a,b. It is worth mentioning that with diverse system states the actual load and power loss of the system are different, according to Equations (5) and (21), leading to different power deficiency values according to Equation (16). It can be verified that the operation states after the fault can be calculated accurately by considering the inertia effect of the generators, so that the power shortage can also be determined more accurately.
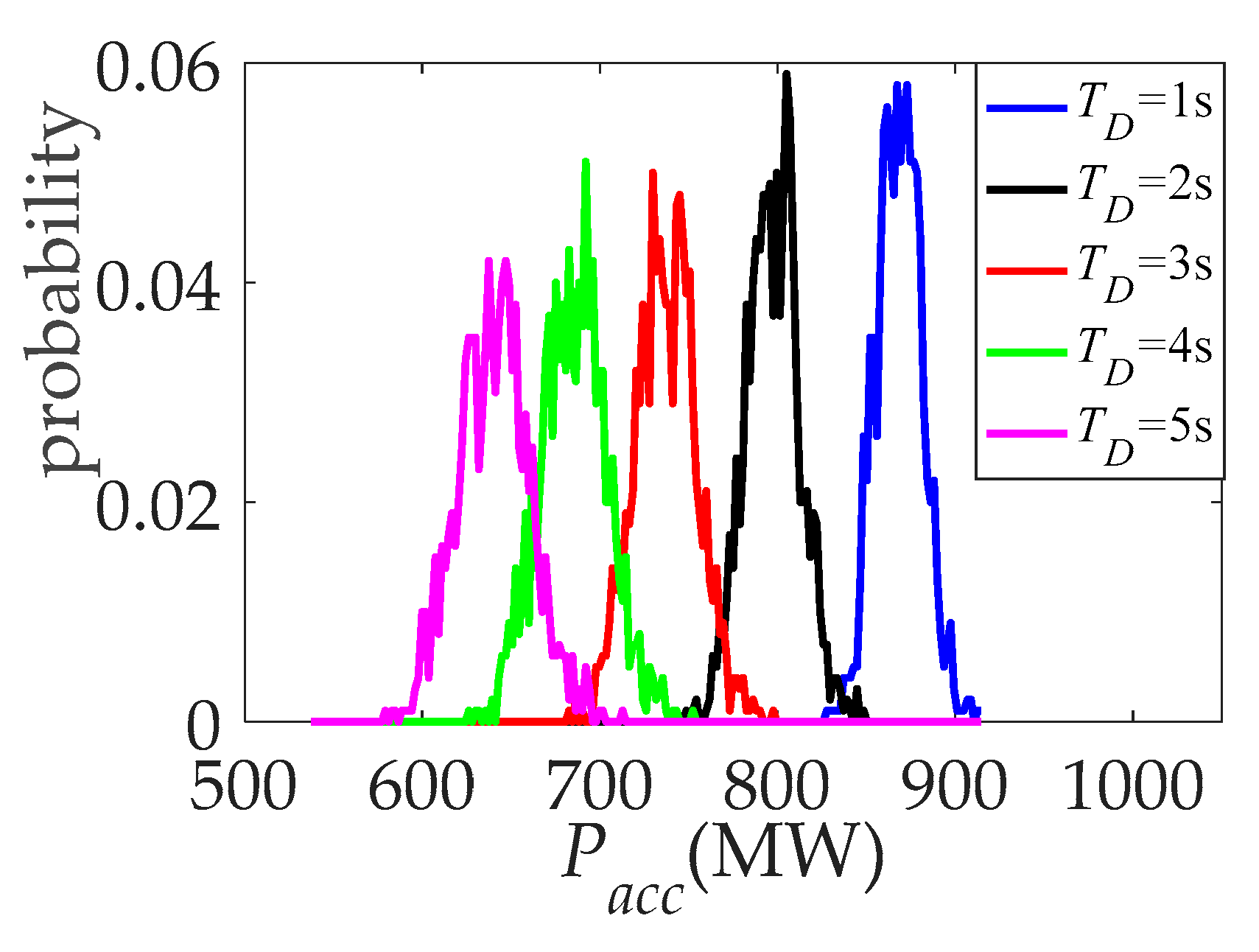
The high power deficiency after the fault needs to be balanced in time, and its response speed will affect how to balance the power deficiency. The accurate calculation of the power deficiency can determine effective countermeasures against its emergence, so that the system can quickly return to the normal state, and vice versa. In fact, the inertia effect of the generator exists during the response delay of the actual system, so there is a significant error of the power shortage when the inertia effect of the generator is not taken into account. Therefore, it is necessary to introduce the inertia effect of the generator to calculate the accurate power deficiency for the high power imbalance fault. To further illustrate the role of the inertia effect of the generator, the response delay time
is changed to obtain the distribution of the actual power deficiency in
Figure 7.
The actual power deficiency of the system decreases with the increase of the delay time . This is because, as the delay time increases, the system frequency and bus voltage drop more, resulting in a smaller actual load of the system, so that the power shortage is smaller. It is worth noting that the total load shedding would be smaller with a larger response delay. However, the frequency and bus voltage dropping too much may cause the relay protection to act, or may even result in a collapse of the system and voltage. Therefore, the system response delay should be set according to the practical situation of the system.
4.4. Determination of Load-Shedding Strategy Scheme
To illustrate the influence of the different load shedding schemes on the system security after the DC blocking fault, the load-shedding coefficients of each bus, according to
Section 3.3, are used to obtain the security index of the system after the fault. When the load-shedding coefficients
,
and
are employed, the corresponding security index values are 31.3423, 26.7135 and 11.8081, calculated individually via Equation (32). To validate the effectiveness of the new security index proposed in
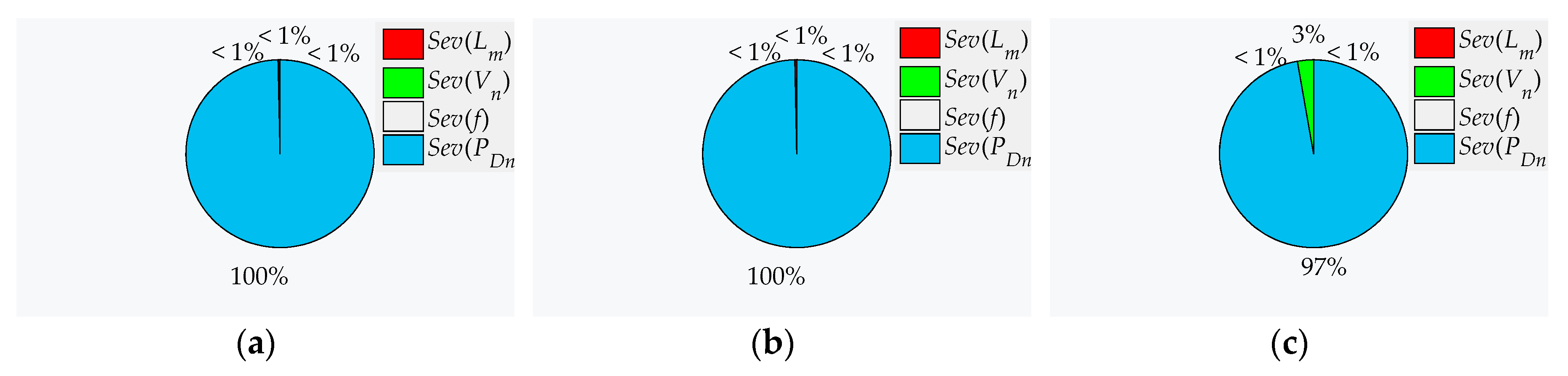
Section 3.4, the compositions of the comprehensive security index
Sev with different load-shedding coefficients are shown in
Figure 8. It can be seen from
Figure 8 that no matter which load-shedding coefficient is adopted, the severity of the load distribution shifting
contributes to the main block to the system safety index. On the one hand, this result shows that the introduction of the load-shifting severity index plays an intuitive and important role in the system safety index. On the other hand, it indicates that the voltage magnitude, frequency and branch power can be guaranteed to slightly exceed the limit or not exceed it at all via the use of the load-shedding strategy after the fault, which also benefits from the accurate determination on the power deficiency in the previous step.
It is worth mentioning that different load-shedding schemes have different influences on the steady-state security of the receiving-end system after the fault, while the load-shedding coefficient corresponding to M3 makes the system have the best security level after the fault. This is because the load-shedding coefficient determined by the PF tracing results can result in the load that is majorly supplied by the blocking line being cut, thus leading the system state to change less after the fault compared to other load-shedding coefficients. Therefore, after accurately solving the total power shortage, it is necessary to adopt a more reasonable load-shedding strategy to keep the system more secure. To further simplify the
, the relationships between the
and the actual power shortage of the system are analyzed, as shown in
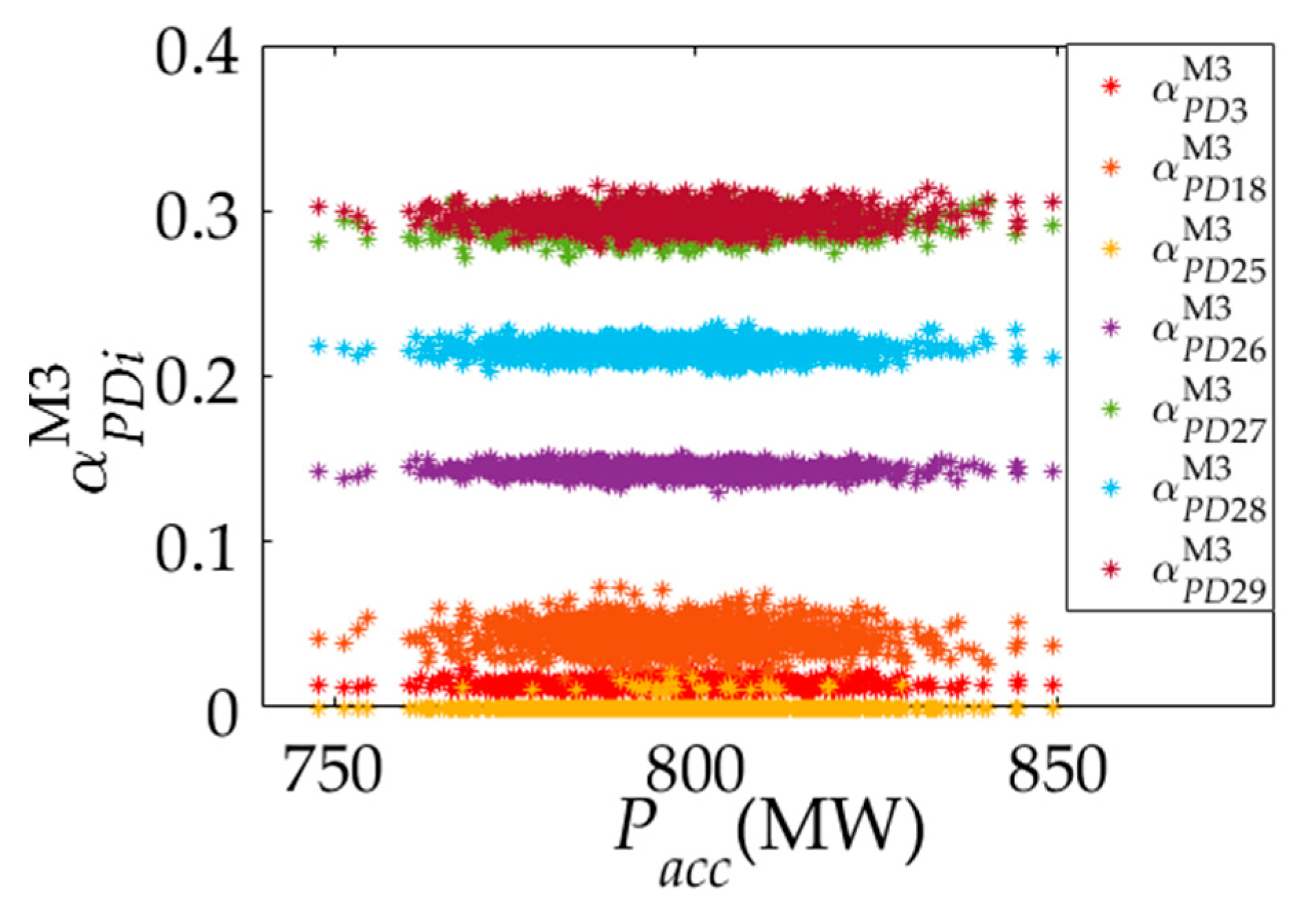
Figure 9.
As can be seen from
Figure 9, if the actual power deficiency of the whole system varies in the stochastic context, the load-shedding coefficient of the same bus could be different. Even if the actual power deficiency is the same, the load-shedding coefficient of the same bus will be different due to the different operation states of the system. However, the change of the load-shedding coefficient, along with actual power deficiency for the same bus, is small and can be treated as a constant, but this is not investigated in the other two load shedding strategies where
and
are adopted. The load shedding coefficients for M3 remaining approximately constant values can be explained by the fact that the PF tracing result of each load bus varies almost linearly with the power deficiency, which leads to the unchanged value of
for the different samples. Therefore, the expectation of the load-shedding coefficient
is adopted for the different actual power deficiencies under the stochastic context. In addition, the security index of the system is 11.9091 when
is used as the load-shedding coefficient. This shows that the system security is still basically unchanged when
is adopted as the load-shedding coefficient as compared to
, but more importantly the deterministic coefficients achieved for the load-shedding strategy are more practical.
5. Conclusions
In this paper, an emergency load-shedding strategy for the DC blocking fault of a hybrid AC/DC receiving-end system grid is proposed, taking into account the static frequency and voltage characteristics of the stochastic load model. The new stochastic load model, which considers the randomness of the rated load and the load compositions with static frequency/voltage characteristics, is more practical than the traditional load model. Through the analysis of the load model, it can be found that both the static frequency and voltage characteristics of the load have a depressing effect on the randomness of the load, while the effect of the former one is more obvious. Therefore, the introduction of the static frequency and voltage characteristics of the load, including their distributions, makes the actual load and power shortage estimation after the fault more accurate. After the DC blocking fault, the inertial effect of the generator is introduced to accurately determine the operation state after the fault; thus, the actual power deficiency can be obtained by updating the actual load and power loss of the system.
The experimental analysis indicates that there are many factors affecting the actual power shortage after the fault. Among them, the static characteristics of the load and the system response delay time have the most significant influence, while the fluctuations of the wind power and rated load have a slight influence. In detail, the response delay of the system makes the operation state vary, leading to a power loss change; furthermore, the static characteristics of the load make the actual load vary with the operation state. The combination of the response delay and load static characteristics results in the actual power imbalance being smaller than the power lost by the DC blocking line, which is more practical compared to the existing method. Therefore, in order to obtain the accurate power imbalance after the fault, it is necessary to establish an accurate load model and calculate the operation state exactly, especially to accurately determine the load parameters for the load model.
In addition, this paper also puts forward a comprehensive evaluation index of the system security, more comprehensive than the traditional security index, and which not only takes into account the traditional off-limit situations of the bus voltage and branch but also the off-limit situation of the frequency and load offset degree. The security index of the system is used to compare different load-shedding schemes and select the load-shedding scheme with the best performance. Under the basic premise of not deteriorating the system security, the load-shedding coefficients of the loads, corresponding to the proposed load-shedding strategy for different power shortages, are unified in this paper, so as to make the load-shedding strategy more practical.

 and
and 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}