1. Introduction
Nowadays, most medium voltage distribution networks in China employ an ineffectively grounded (i.e., isolated or a anti-arc coil grounded) neutral to reduce overvoltage caused by SPG faults [
1,
2]. As a result, the very low fault current and unstable fault arcs make it difficult to detect faulty lines during SPG faults [
3,
4,
5]. When a SPG fault occurs, the anti-arc coil over-compensates the total capacitive current in the network, and the residual fault current is not seriously harmful to the power supply equipment in a short time, but on the other hand it may leads to deadly consequences if the faulty line is not isolated from the distribution network in time, so it is very necessary to detect and isolate the faulty line automatically to ensure the reliability of the distribution automation and power supply.
Due to the fact the over-compensation of the anti-arc coil greatly weakens the characteristics in SPG fault conditions, which makes it difficult to accurately perform FLS in RGDN [
6,
7]. By now, some methods have been proposed and applied to select faulty lines in RGDN. The existing faulty line selection methods can be categorized into two groups: active FLS (i.e., signal injection methods) ones and passive FLS ones [
8,
9]. The former need additional signal injection devices and are limited by the capacity of voltage transformers, and the operation and maintenance is comparatively complex. The latter can be divided into ones using steady-state signal [
10] and others using transient signals [
11]. The steady-state signal is weaker than the transient signal and is greatly affected by the system operation mode and arc stability. With regard to those using transient signal, FLS can be realized by extracting high frequency components within the signals. The transient process of SPG faults contains abundant fault characteristic information [
12]. The FLS methods based on transient information are expected to further improve the accuracy of FLS in distribution networks, and have been a focus for relevant researchers in recent years. FLS methods based on transient information have been proposed, such as high-frequency component [
13], wavelet transform [
14,
15], neural network [
16], expert system [
17], extreme learning machine [
18], zero-sequence reactive power method [
19], transient energy method [
20,
21] etc. Moreover [
22] and [
23] discussed synthesis algorithms for FLS.
In order to improve the performance of FLS in RGDN, a FLS method based on power integral of transient DC component in zero-sequence is proposed. By constructing the transient zero-sequence equivalent network in a RGDN and analyzing the characteristics of the transient zero-sequence current, it is found that the fault current of SPG faults contains a notable attenuated DC component, which is formed by the anti-arc coil, faulty line and grounding resistance. However, the corresponding DC component in the sound line is very weak. In the following, on the basis of the discussion of current in zero-sequence, a novel FLS based on zero-sequence DC energy integral is proposed. Theoretical analysis and simulation results demonstrate that it is a sensitive and reliable FLS method for RGDN, and with the increasing development of electronic transformer technology such as advanced current transformer with Rogowski coil and low power current transformer (LPCT) etc, saturation of current transformers caused by aperiodic components will be solved effectively and the method proposed in this paper is expected to be applied in practice.
2. Characteristics of Transient Zero-sequence Current in RGDN
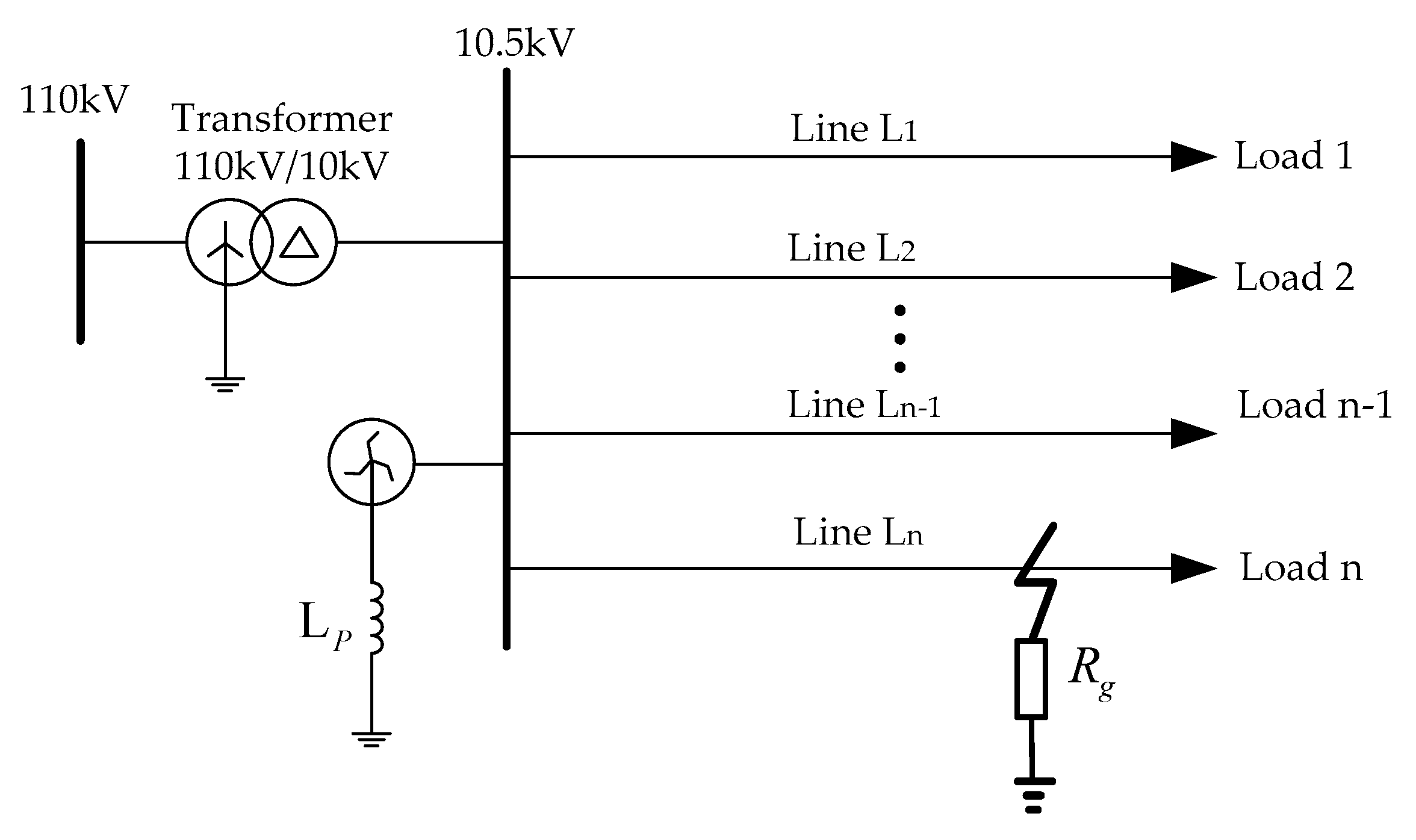
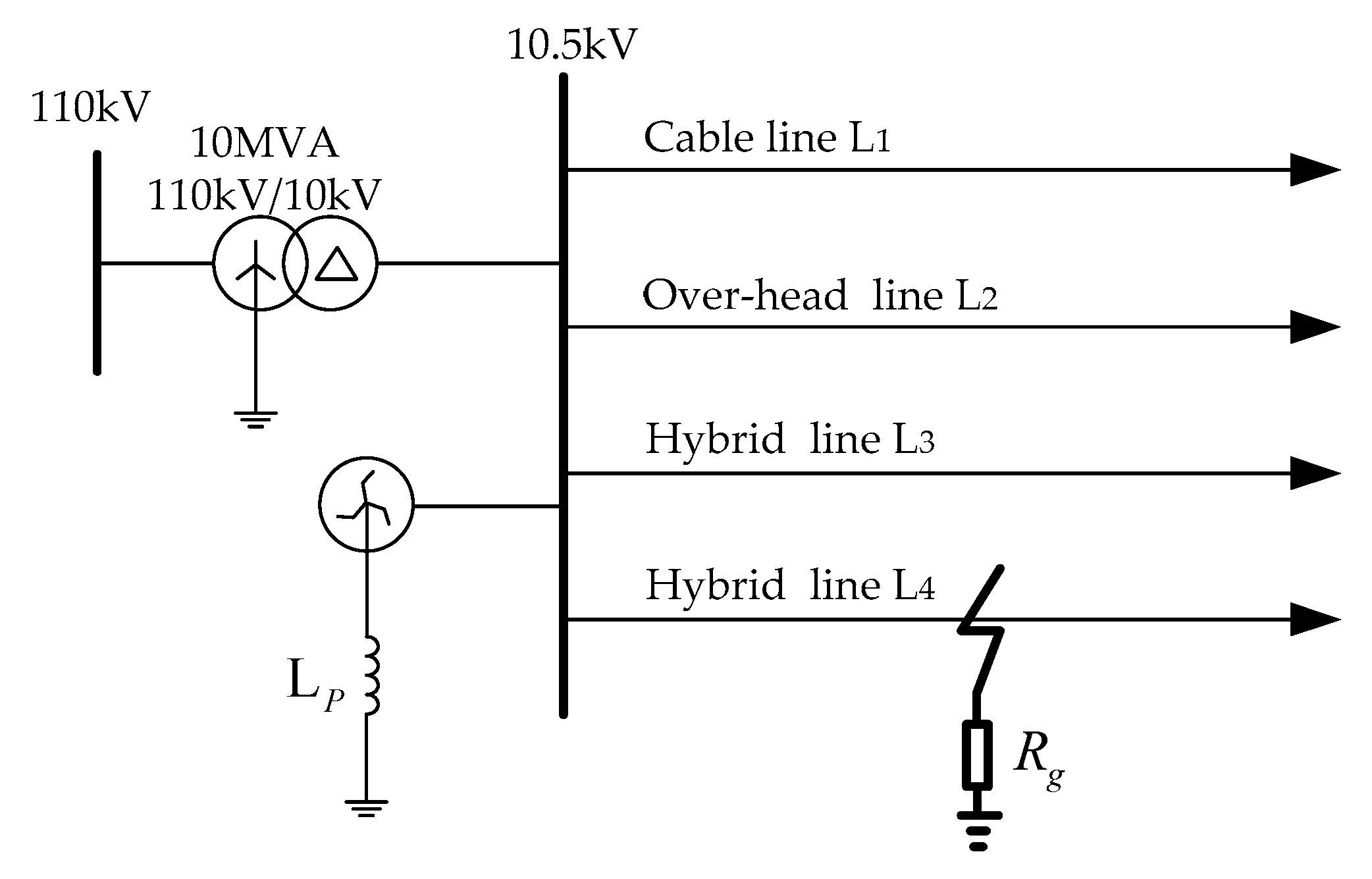
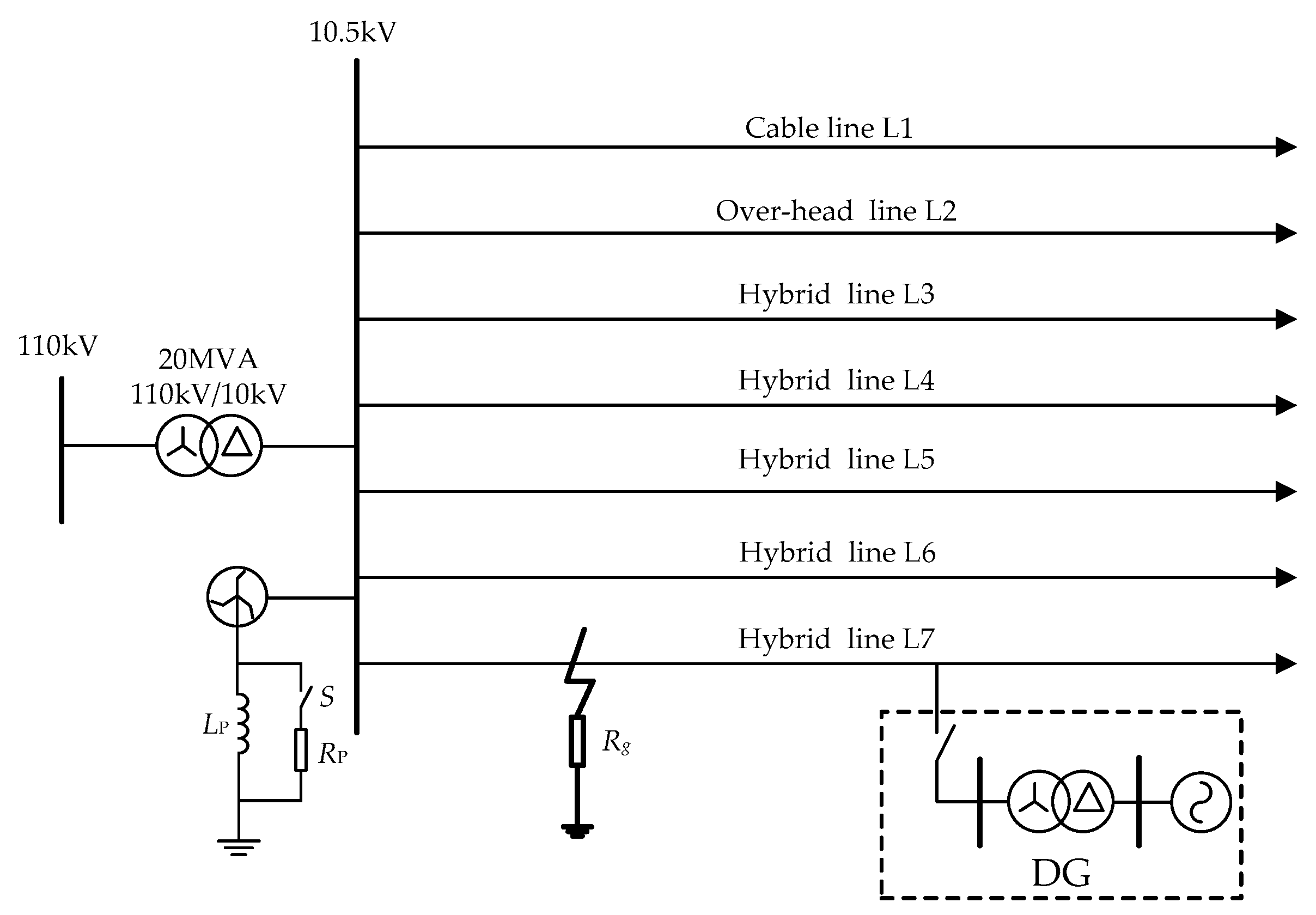
RGDN is widely used to improve the reliability of the power supply in medium and low-voltage distribution networks in China. At the same time, the anti-arc coil weakens the fault characteristics of the SPG faults and lower the current of the system, which increases the difficulty of FLS. The distribution power system network with arc-anti coil, which is listed as
Figure 1, was used for analyzing SPG faults that occur in the system.
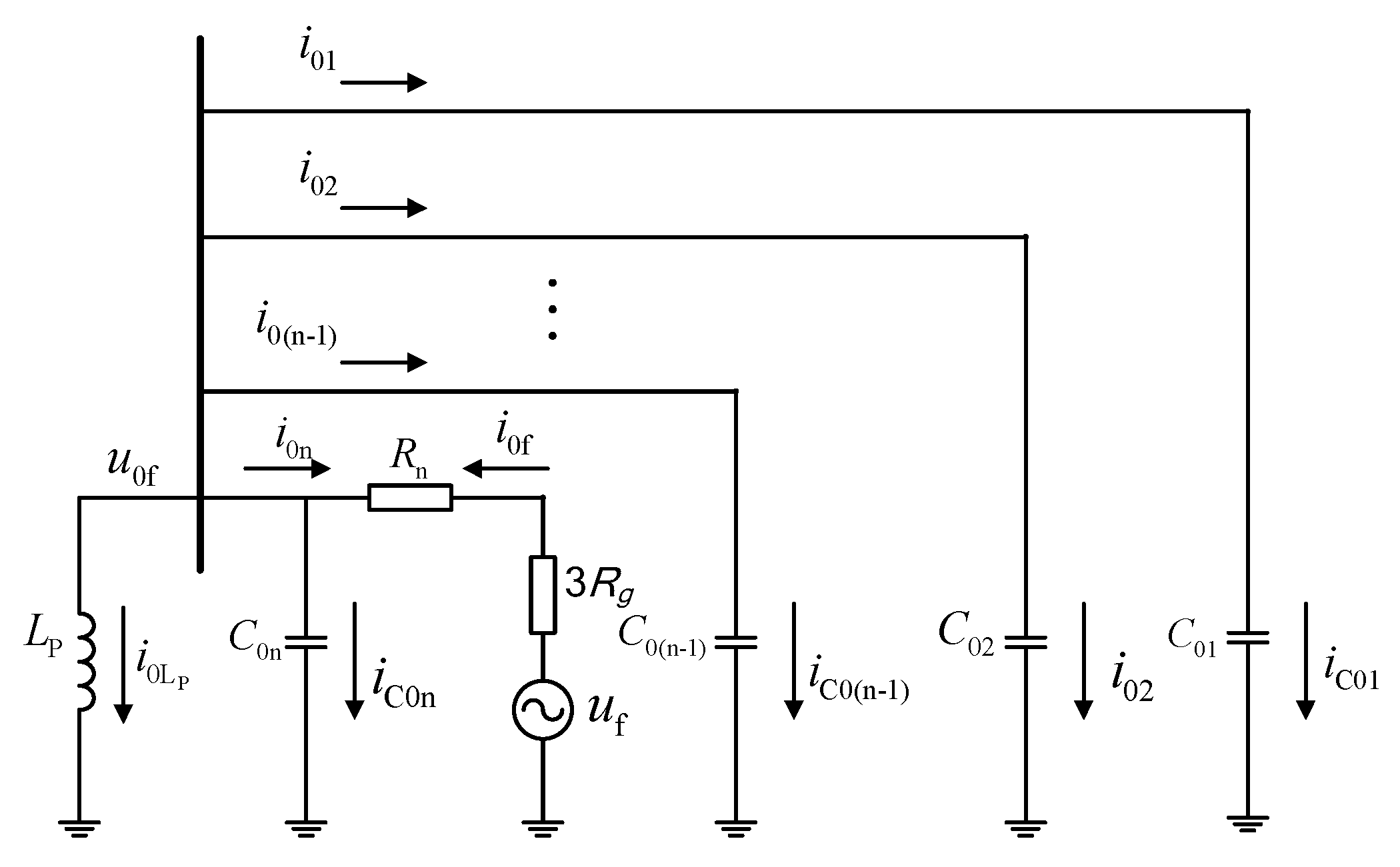
The zero-sequence circuit shown in
Figure 2 is discussed, and the parameters are defined as follows:
is the equivalent source at the fault point, that is , where is the voltage amplitude of the fault phase, and is the fundamental angular frequency, and is the initial phase angle at the fault time;
is the neutral point displacement voltage;
is anti-arc coil branch current, is the zero-sequence current of each line; is the zero sequence capacitance of each line to ground ().
According to
Figure 2, Equation (1) is expressed as follows:
The current in the anti-arc coil is closely related to the magnetic flux of the anti-arc coil, which is expressed as (2):
In which,
is the RMS of phase voltage,
is the turn number of the anti-arc coil and
is the flux of anti-arc coil. The current in the anti-arc coil can be expressed as:
The flux equation of anti-arc coil can be obtained by substituting Equation (3) into (2).
where,
is determined the steady-state flux,
is used to compensate the phase angle of the current,
is the impedance of the anti-arc coil and
is the time constant of the flux.
Usually, due to
, thus after substitution
;
into (4) can be obtained as follows:
Then Equation (6) expresses the current in the anti-arc coil as follows:
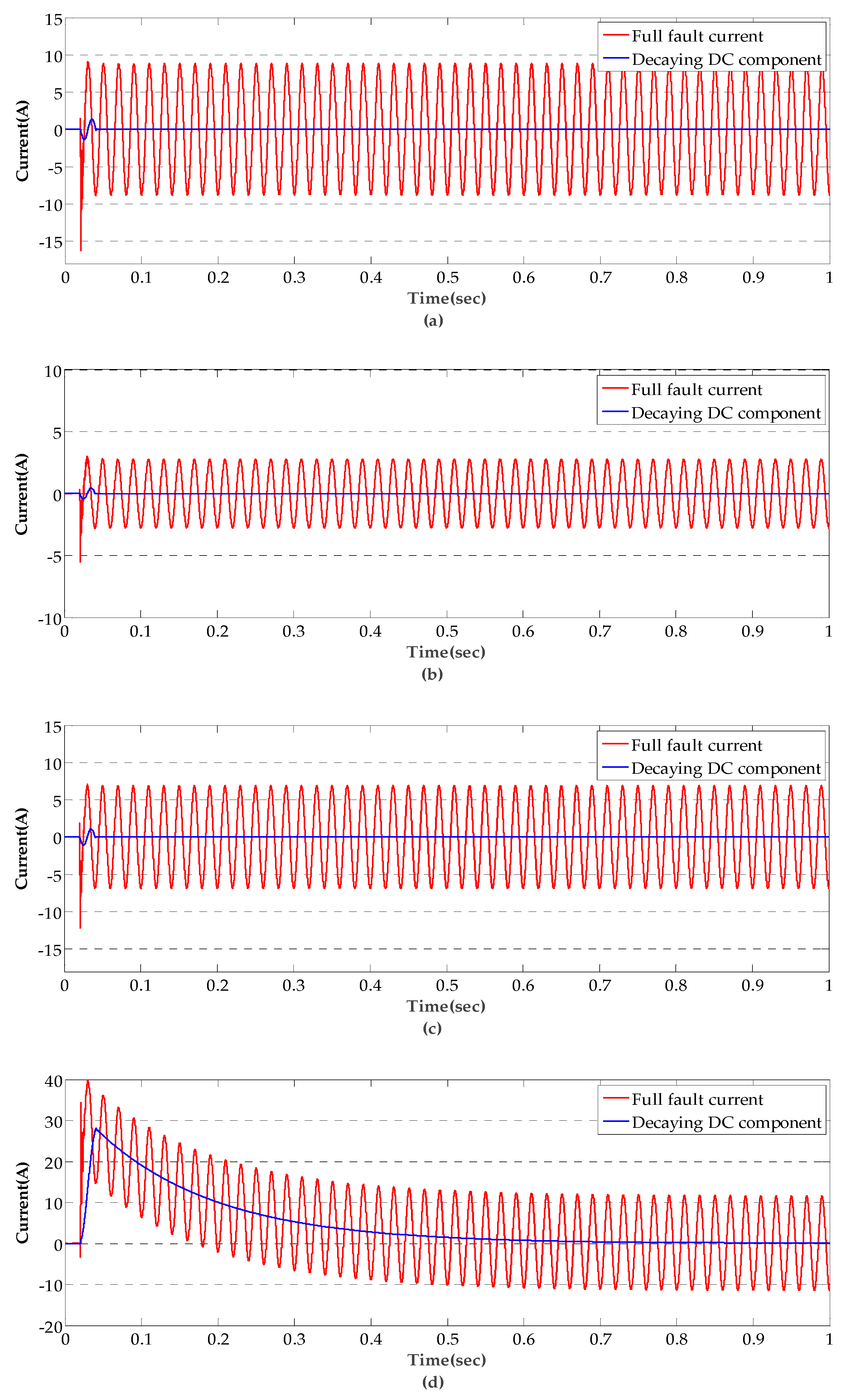
Equation (6) shows that the transient current in the anti-arc coil includes power frequency component and decaying DC component.
The zero-sequence current
in the sound line in the fault transient process is determined as follows:
Moreover, the zero-sequence current
in the faulty line is described as follows:
In Equations (7) and (8), , are the AC and DC components of the zero-sequence current, respectively.
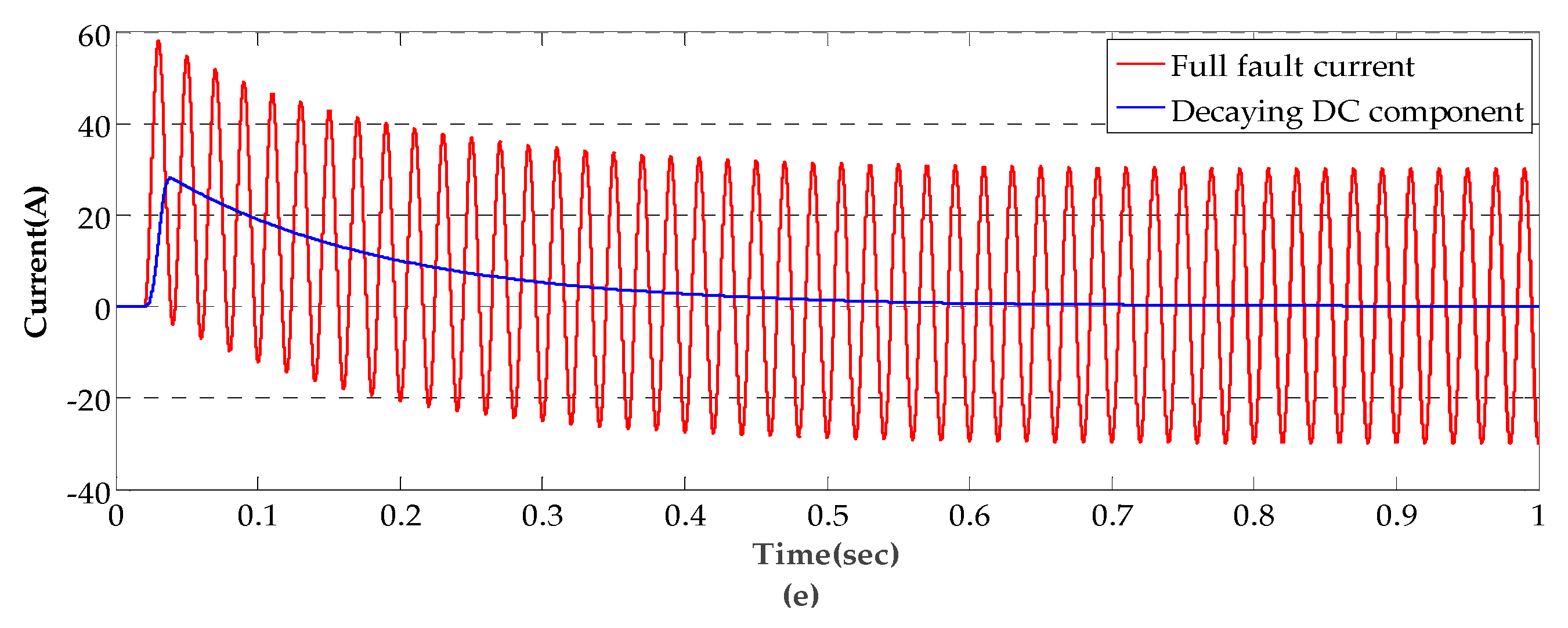
From the above analysis, it can be seen that in the case of a SPG fault, the currents in the anti-arc coil, the faulty line and the sound lines all contain attenuated DC components. The zero-sequence DC component of all lines at the bus is extracted and calculated in Equation (9), where
is the DC component attenuated in the faulty line and
is the the decaying DC component in the sound line.
denotes the amplitude calculation:
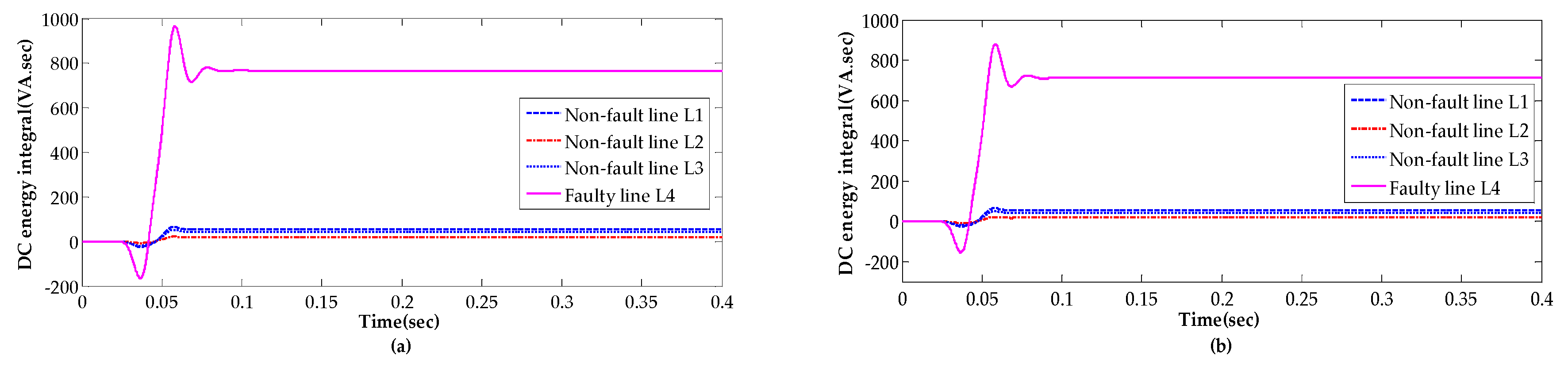
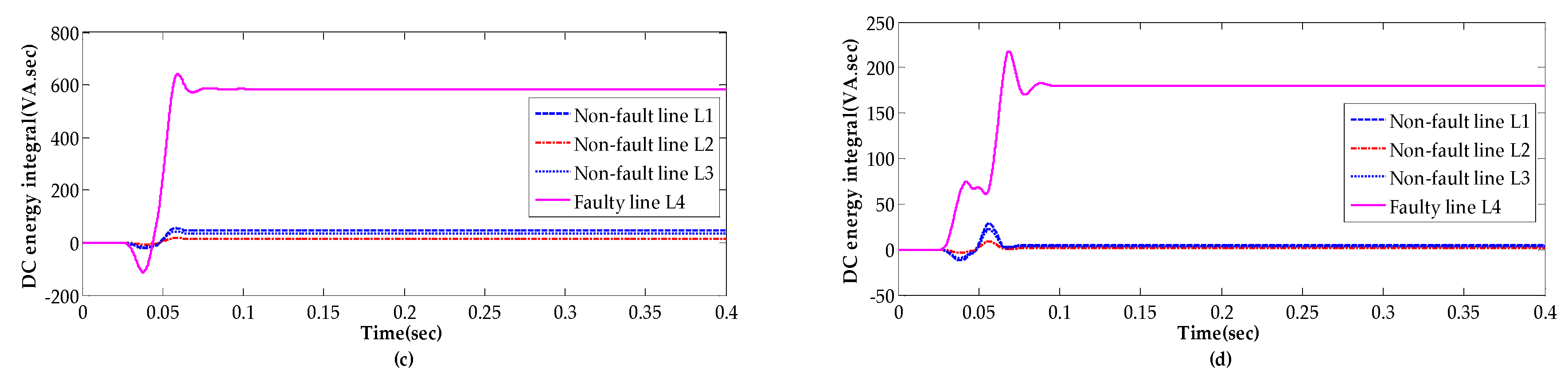
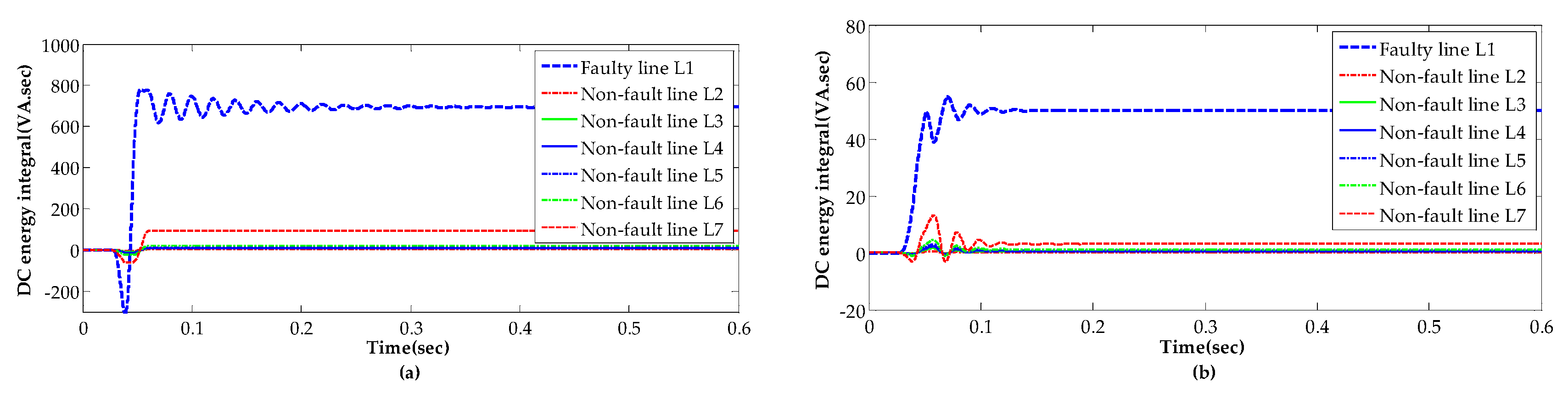
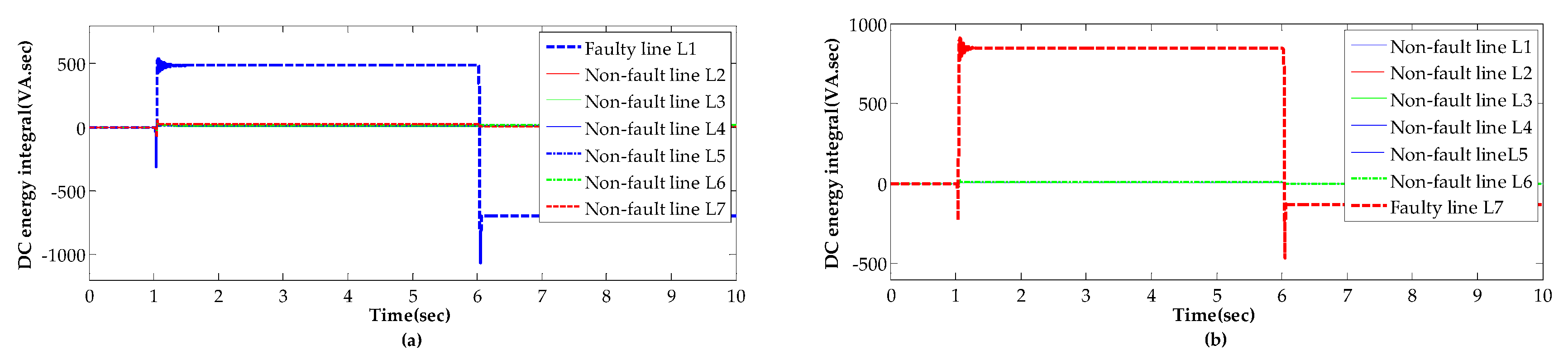
Equation (9) shows that the DC component of zero-sequence current in faulty line is larger than that of any sound line when a SPG fault occurs. Especially in the case of a metal SPG fault, the DC component of zero-sequence current in faulty line is much larger than that of sound line; even when a high-resistance SPG fault occurs, due to the fact , but is always satisfied, which still indicates that the zero-sequence DC component in the faulty line is the largest.
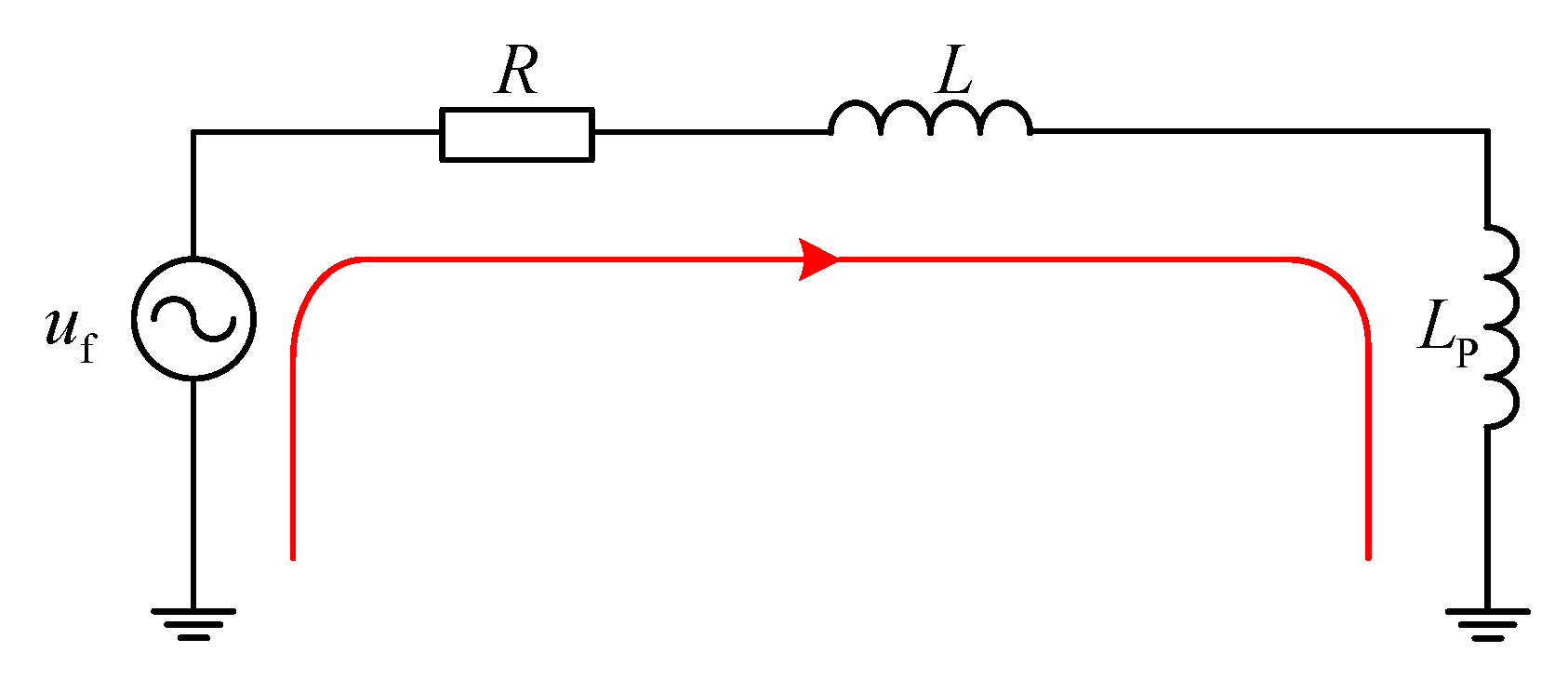
It can be seen from Equation (9), in the condition of a SPG fault in RGDN, the DC component of the zero-sequence current of the faulty line is much larger than that of the sound line, so a large number of DC components only constitute a loop between the anti-arc coil, the faulty line and the grounding resistance. The simplified equivalent circuit of zero-sequence DC component is shown as
Figure 3. In which,
is the equivalent resistance from the fault point to the bus side and the tripled grounding resistance;
is the equivalent inductance from the fault point to the bus side.
Through the analysis above, it can be seen that the fault current in the anti-arc coil contains abundant DC components, which is mainly distributed between the faulty line and the grounding resistance and forms a circuit. That means that the zero-sequence DC component distributed in the sound line is very weak. Therefore, the DC component in zero-sequence can be used to develop FLS method, and a FLS scheme using energy integral of DC component in zero-sequence is developed in the following.
3. FLS Scheme Using Energy Integral of Zero-Sequence DC Component
According to the analysis in
Section 2, the current in the anti-arc coil in SPG fault contains the steady-state power frequency component and the decaying DC component. As the anti-arc coil is designed according to power frequency, there is almost no high harmonics in the current of the anti-arc coil. The DC component mainly forms a loop in anti-arc coil, faulty line and grounding point, while the DC component is weak in the sound line. By using this feature, the DC component in zero-sequence of all lines is extracted for energy integral to FLS.
After a SPG fault occurs, the displacement voltage of neutral point and zero-sequence current of all lines are collected under the same data window, and the DC component is extracted. The power of zero-sequence DC component of each line is calculated respectively. Equation (10) determined the power of any sound line:
Similarly, Equation (11) described the power of the faulty line:
where
is the number of the faulty line,
is the displacement voltage.
is the power of zero-sequence DC of any sound line and
is the power of zero-sequence DC of the faulty line. The zero-sequence DC energy of the sound line is obtained by power integral in the same time domain as shown in Equation (12):
and that of the faulty line is shown as follows:
Thus, Equation (14) gives the DC power integral ratio between the faulty line and the sound line:
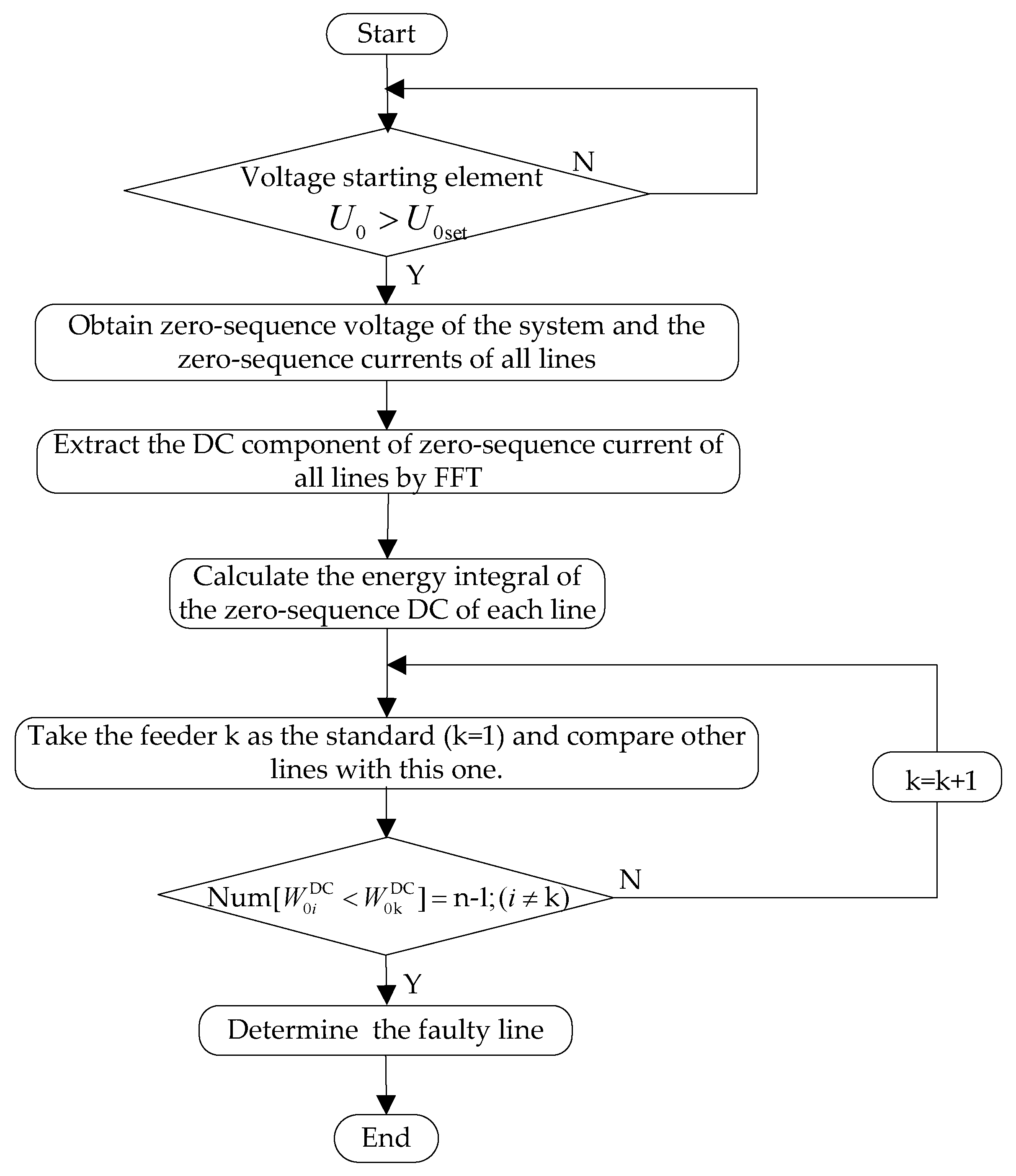
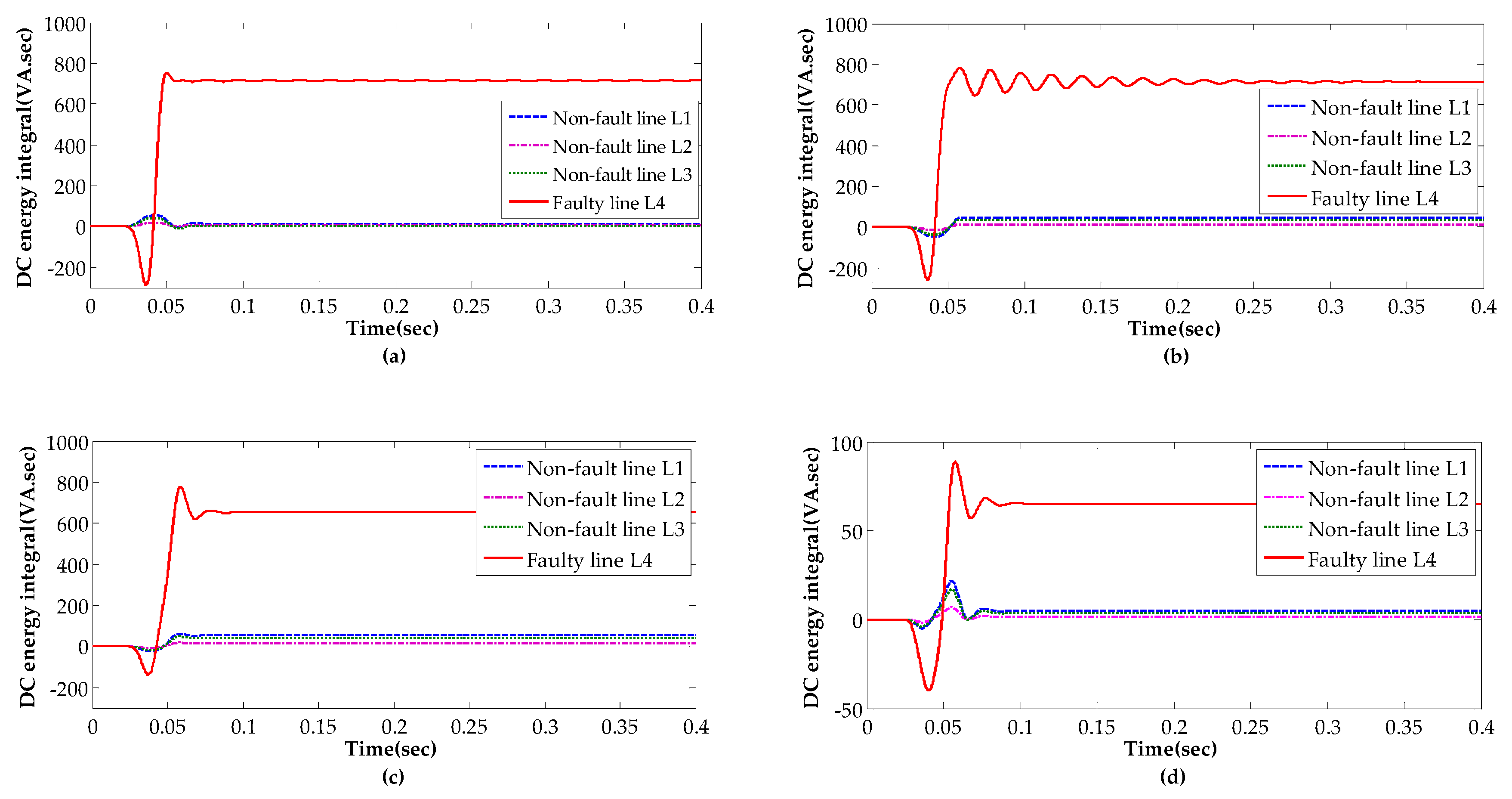
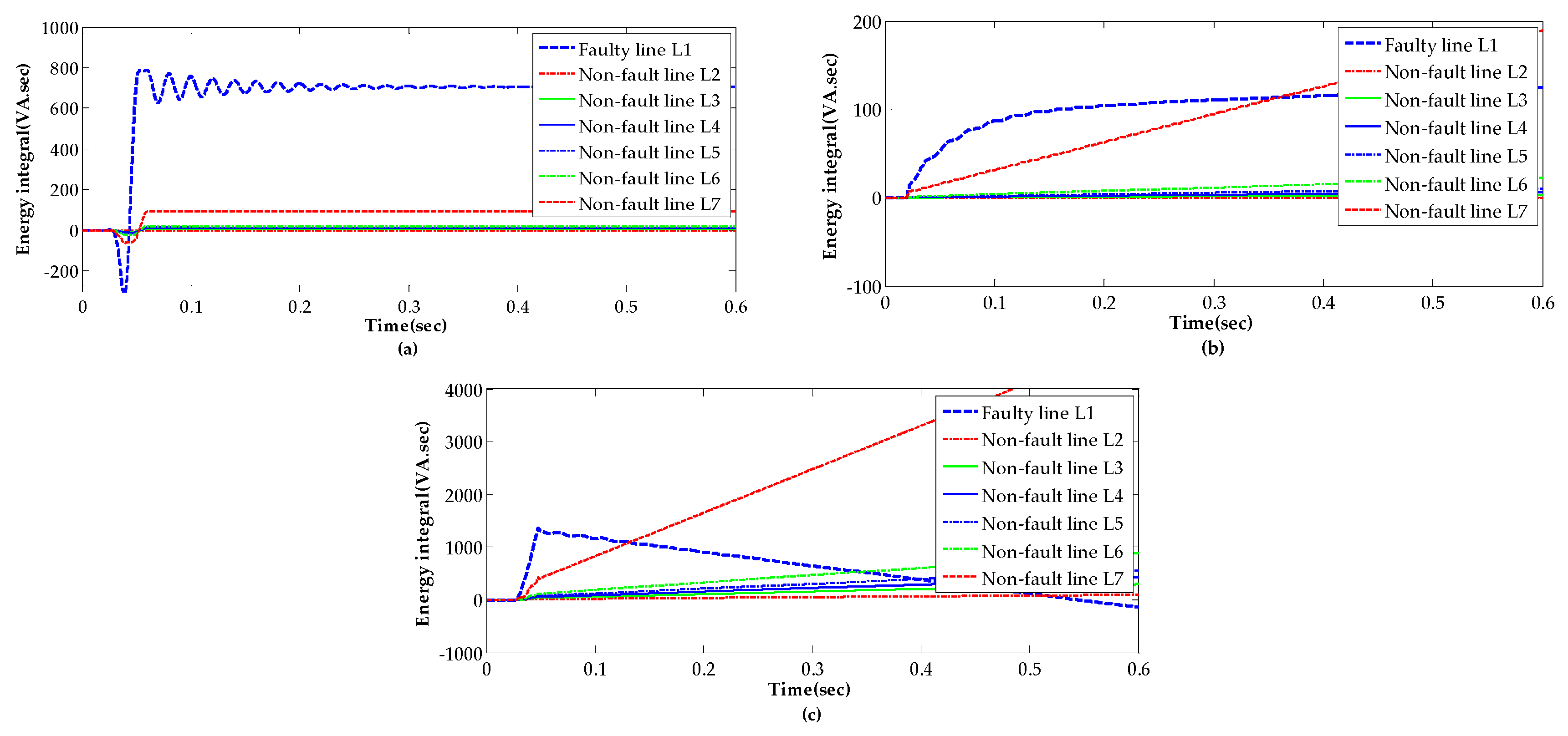
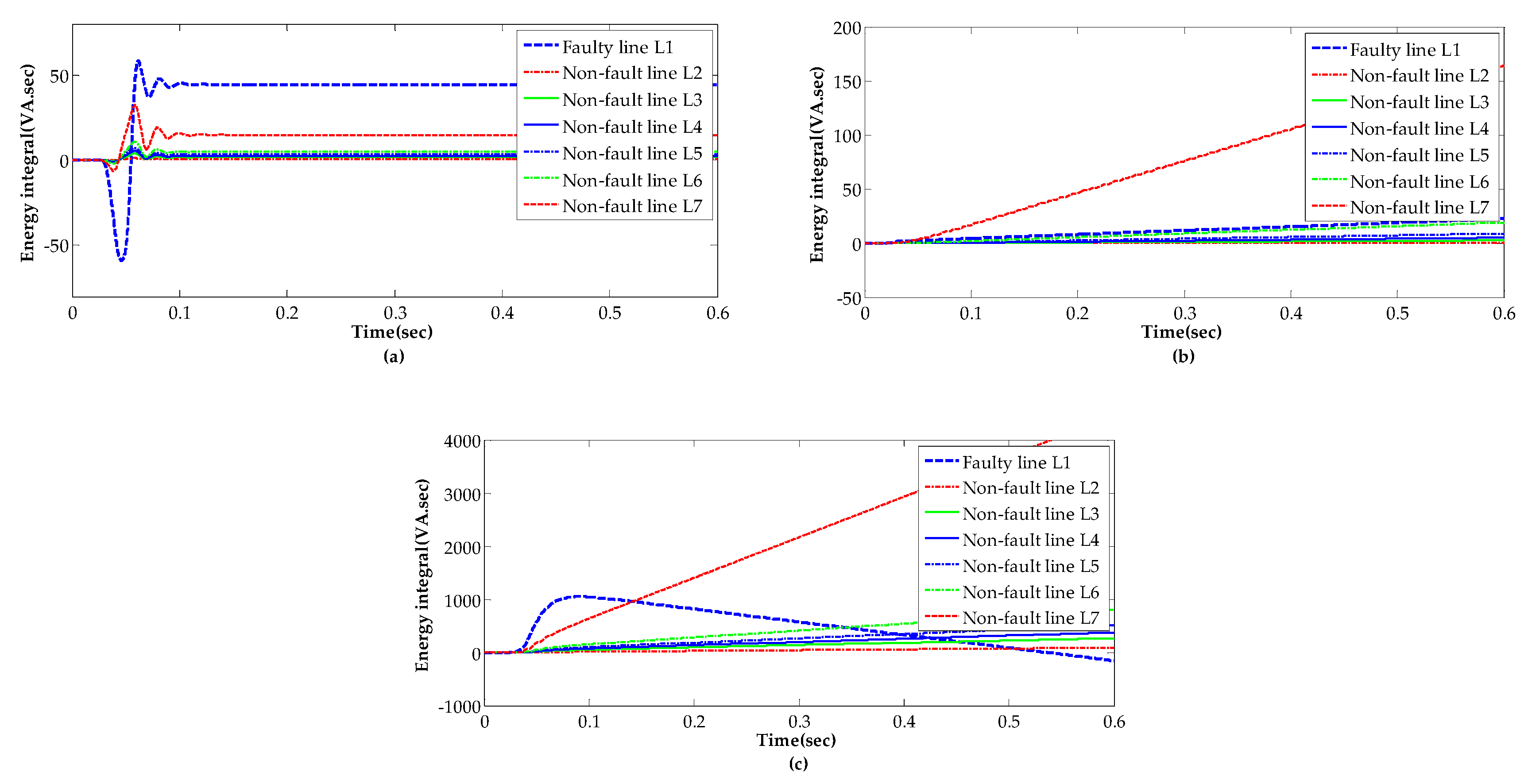
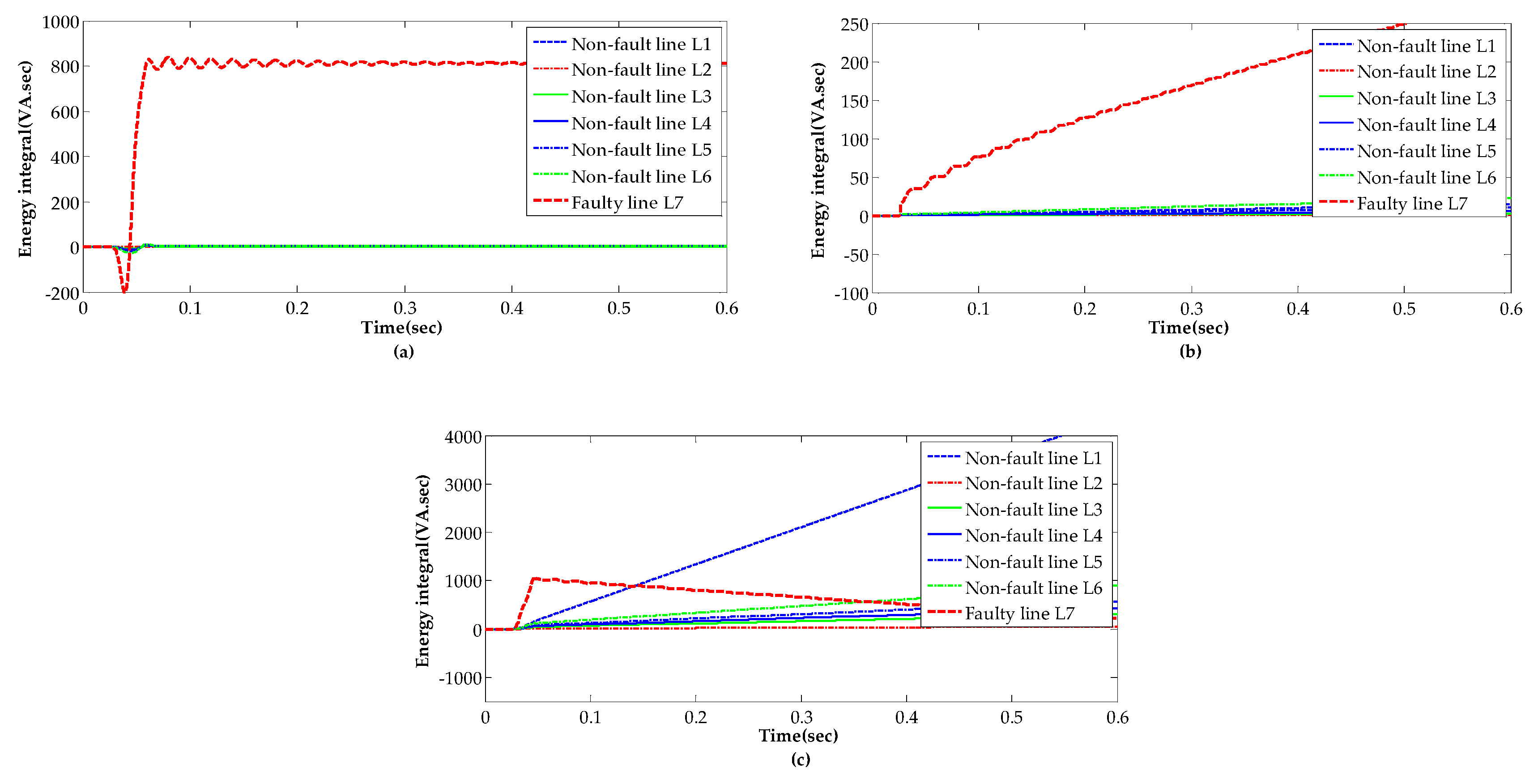
Analysis of Equations (7)–(14) shows that there is a notable DC component in the zero-sequence current of the faulty line, but the DC component in the zero-sequence current of the sound line is poor. Thus, using the same zero-sequence voltage, the DC energy in zero-sequence of the faulty line will be much larger than that of the sound line, and even in the case of a high resistance SPG fault, the DC energy in the zero sequence of the faulty line is higher than in any sound line. Therefore, the difference can be used to FLS in the condition of SPG faults. The FLS method based on the zero-sequence current feature recognition is shown in
Figure 4.
The proposed FLS scheme implementation steps are described as follows:
Step 1: Collect the bus terminal zero-sequence voltage in real time and judge whether that zero-voltage element exceeds the setting value, if not, return to continue; else, the system may occurred a SPG fault, perform the next step.
Step 2: Obtain the zero-sequence currents of all lines and extract the DC component by fast Fourier transform (FFT), then calculate the energy integral of the zero-sequence DC current of each line.
Step 3: By comparing the DC energy of all lines one by one, the line with the largest energy integral is identified as the faulty line and the result feedback to fault processing system timely.
On the above steps and processes of the faulty line selection, when a SPG fault occurs, the FLS device is started, and the line with the largest DC energy is selected as the faulty line. Moreover, lots of simulations are carried out for a typical 10 kV RGDN in the next section.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}