Optimal Operation Strategy of ESS for EV Charging Infrastructure for Voltage Stabilization in a Secondary Feeder of a Distribution System



Abstract
1. Introduction
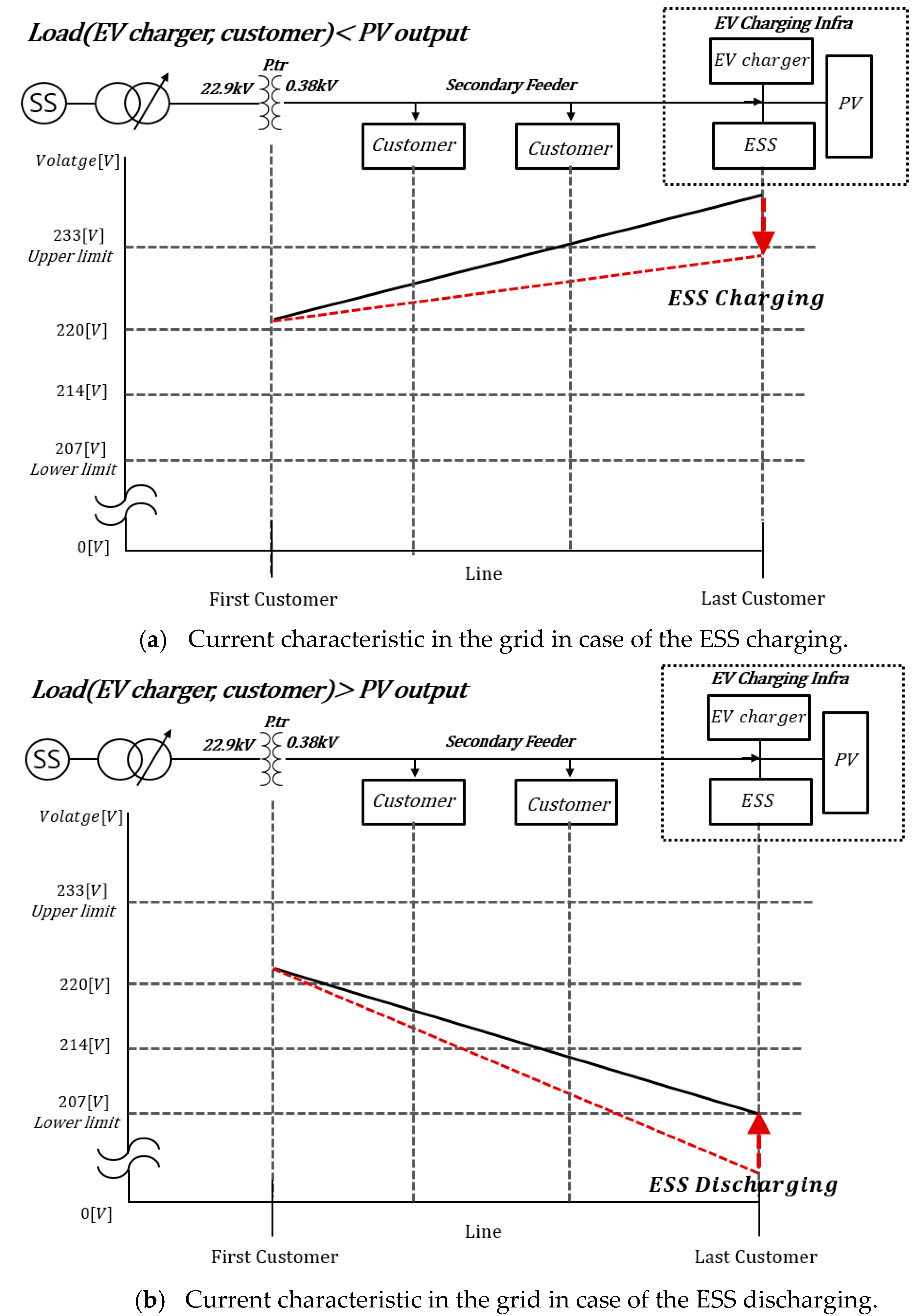
2. Introduction Necessity of an ESS for Voltage Regulation at the Secondary Feeder with EV Infrastructure
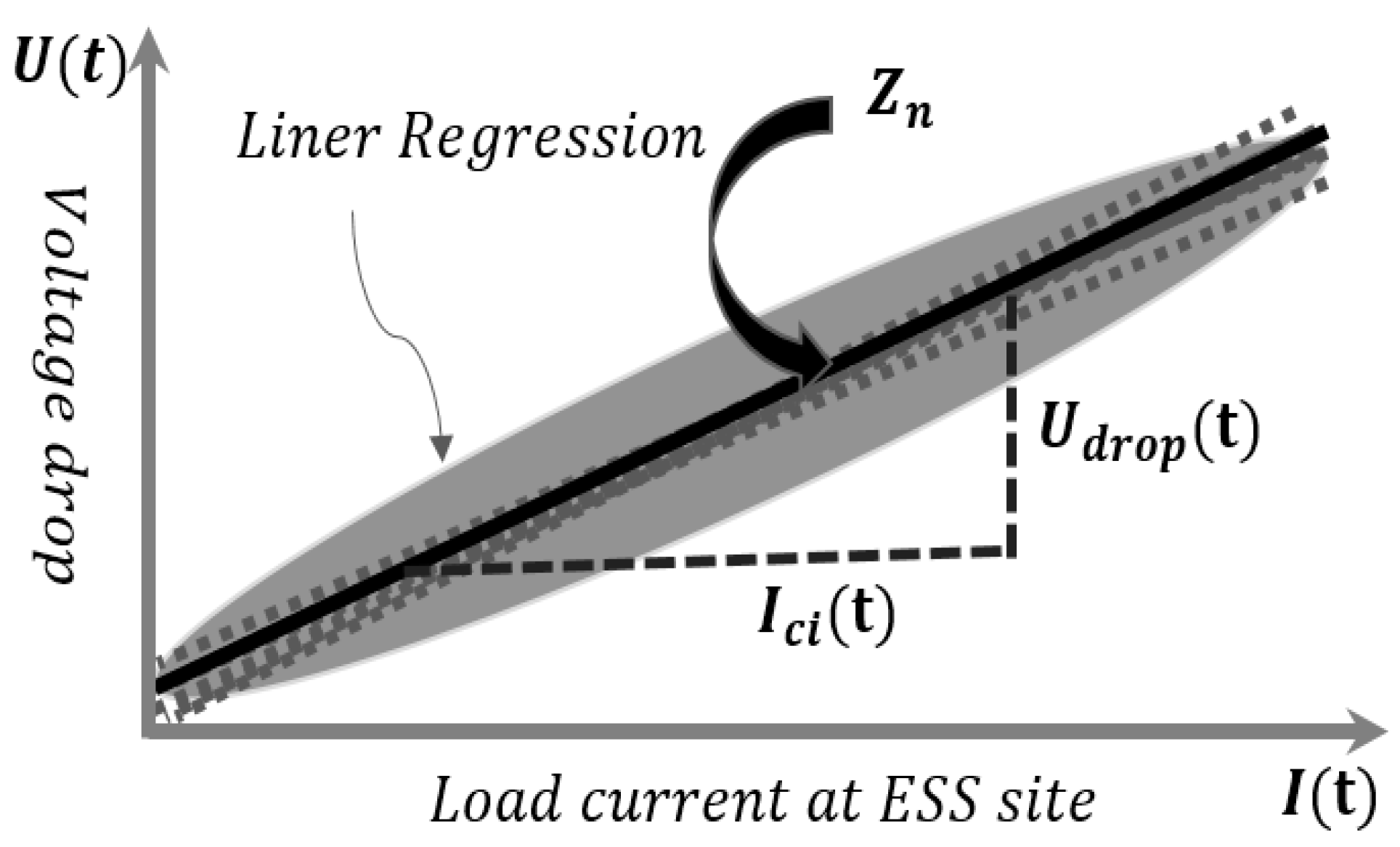
3. Line Impedance Decision Algorithm for Operation of Voltage Stabilization ESS
4. Optimal Operation Algorithm of ESS for Voltage Regulation
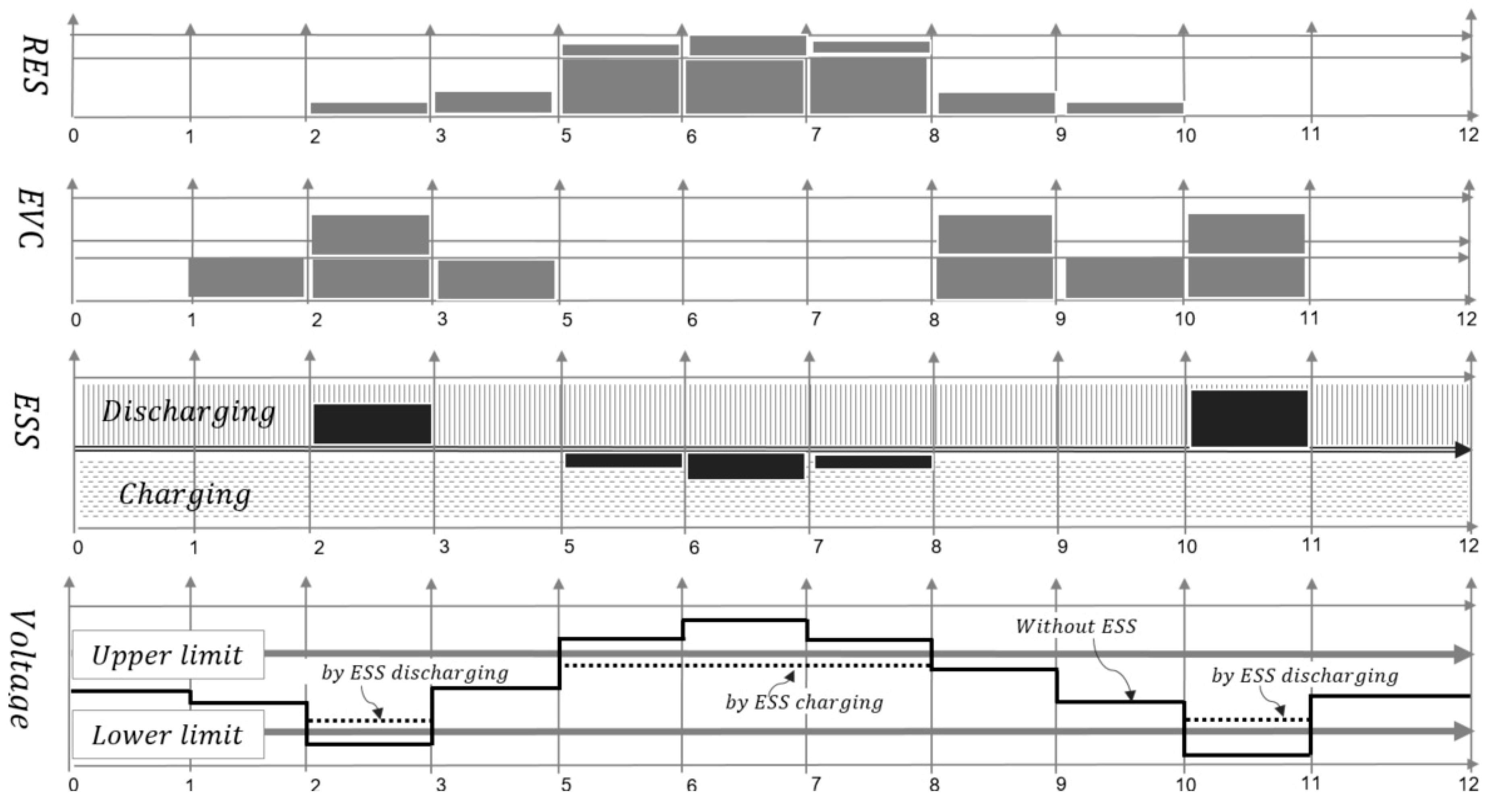
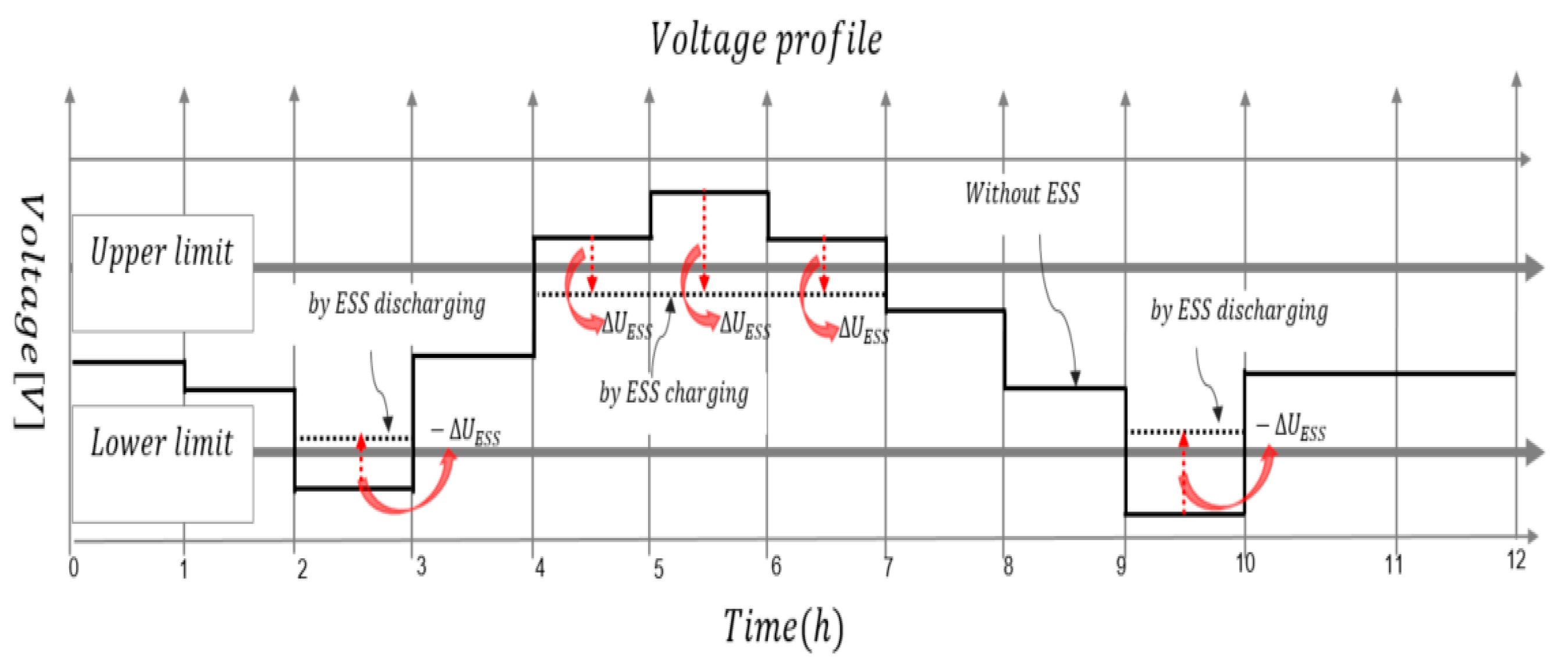
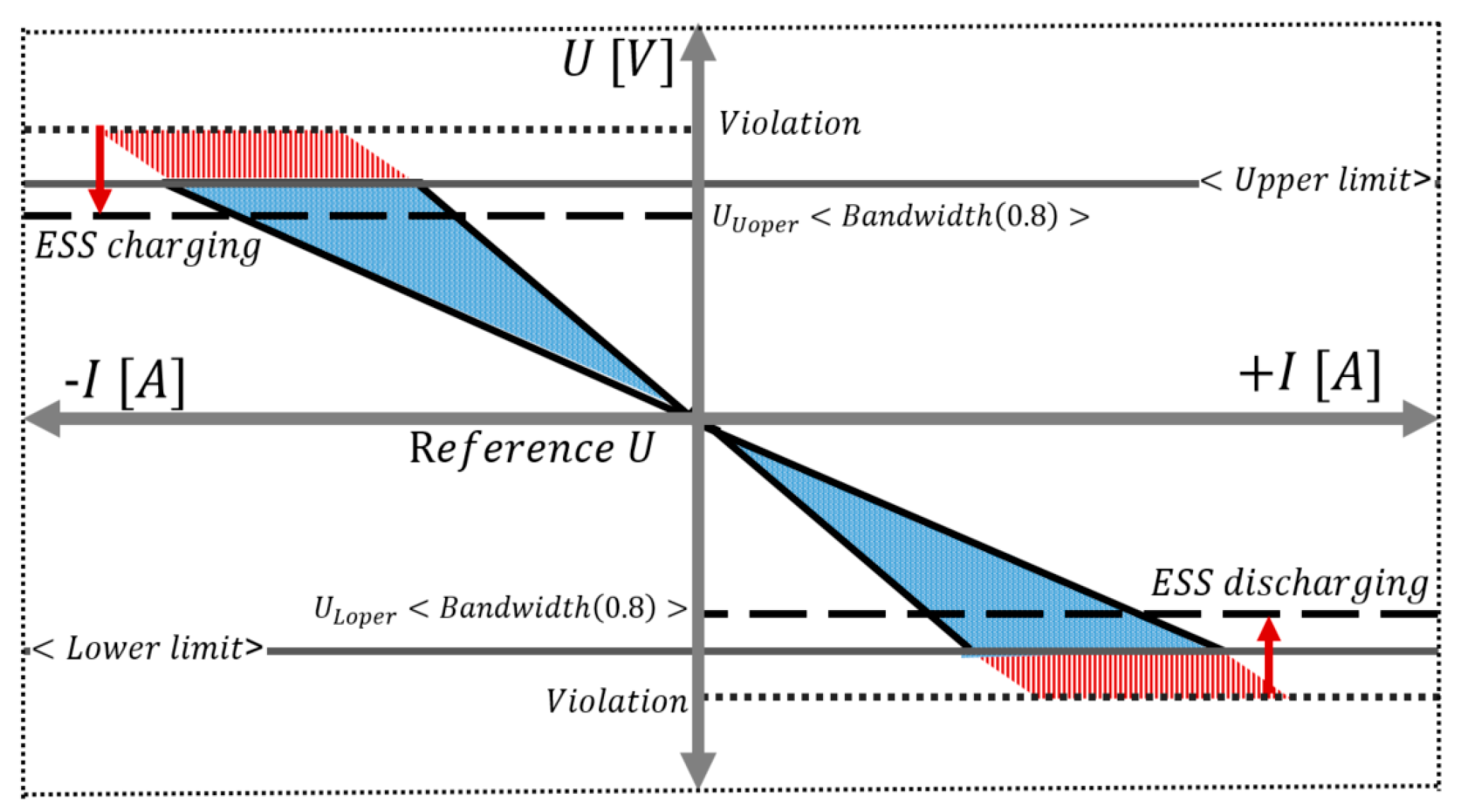
4.1. EVI-Algorithm of ESS for Voltage Regulation
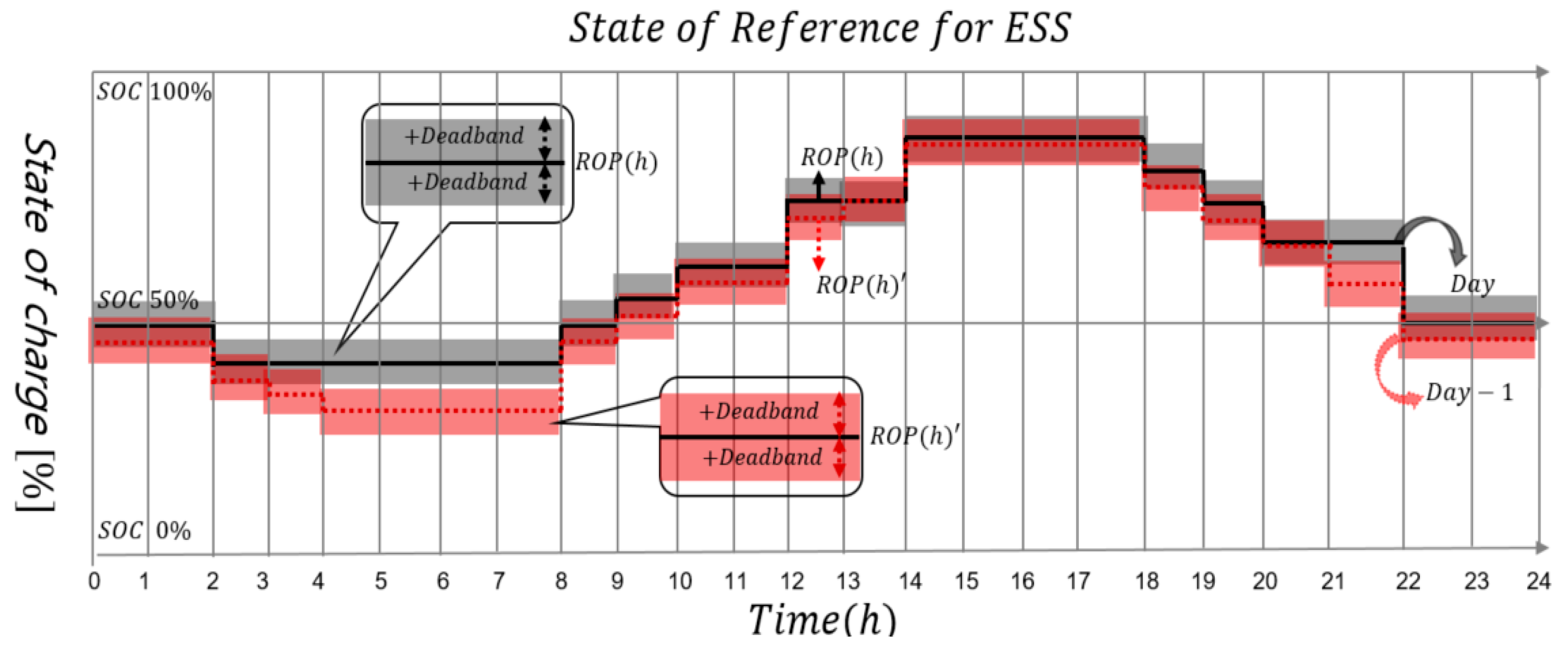
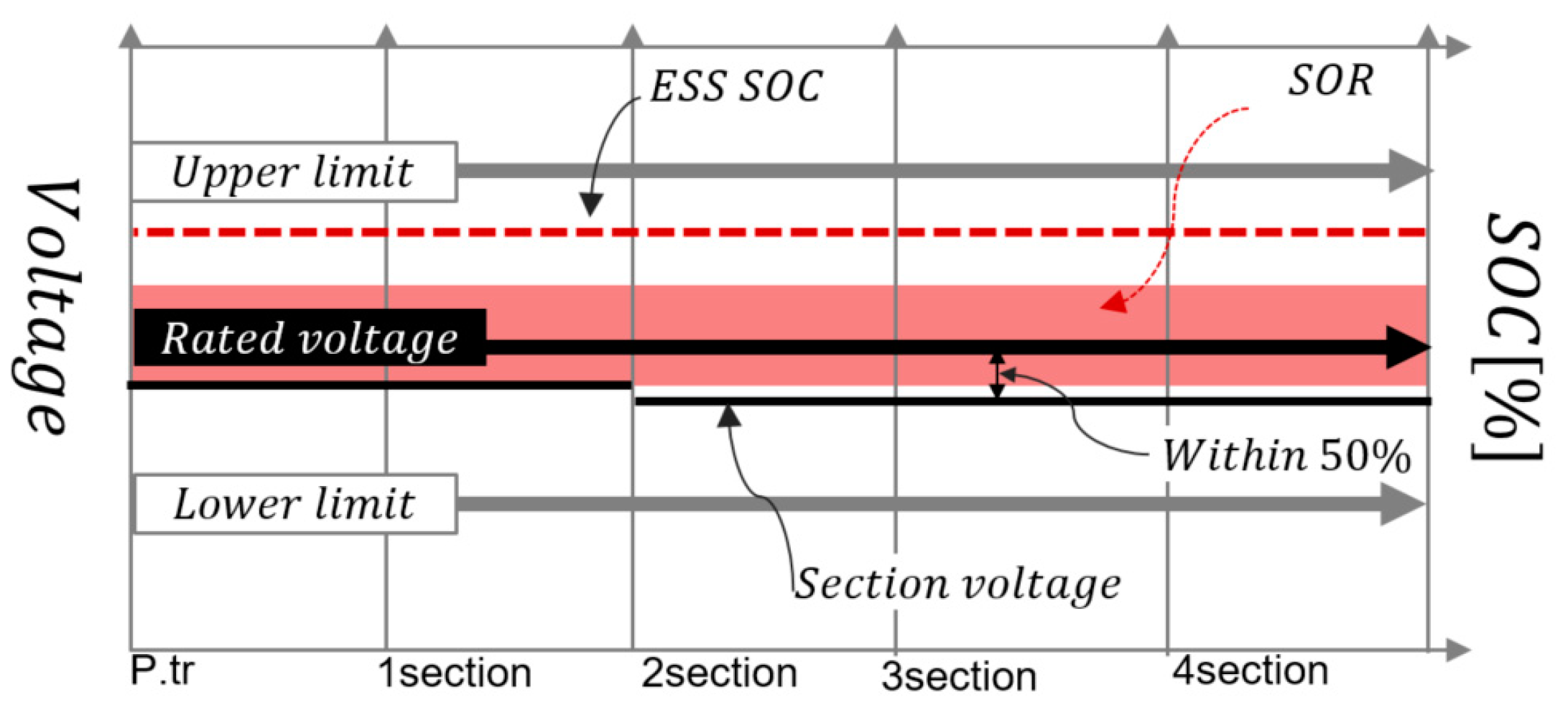
4.2. SOR-Algorithm of ESS for Voltage Regulation
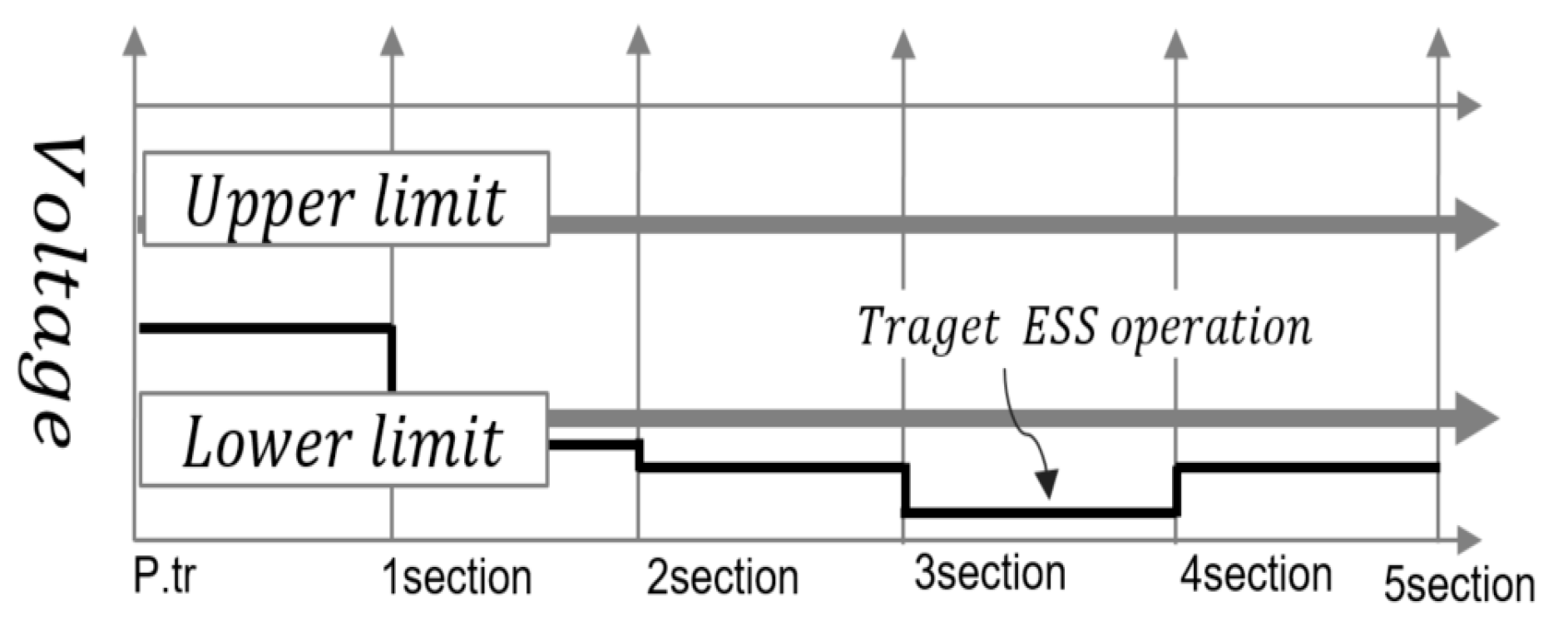
4.3. Coordination Control Strategy between EVI-Algorithm and SOR-Algorithm for ESS
- [Category 1] When the voltage in the secondary feeder violates the upper limit and lower limit.
- Case l. Only one voltage is not kept within the upper limit and lower limit
- Case 2. Multiple voltages are not kept within the upper limit and lower limit
- [Category 2] When the ESS is performed as the SOR-algorithm operation
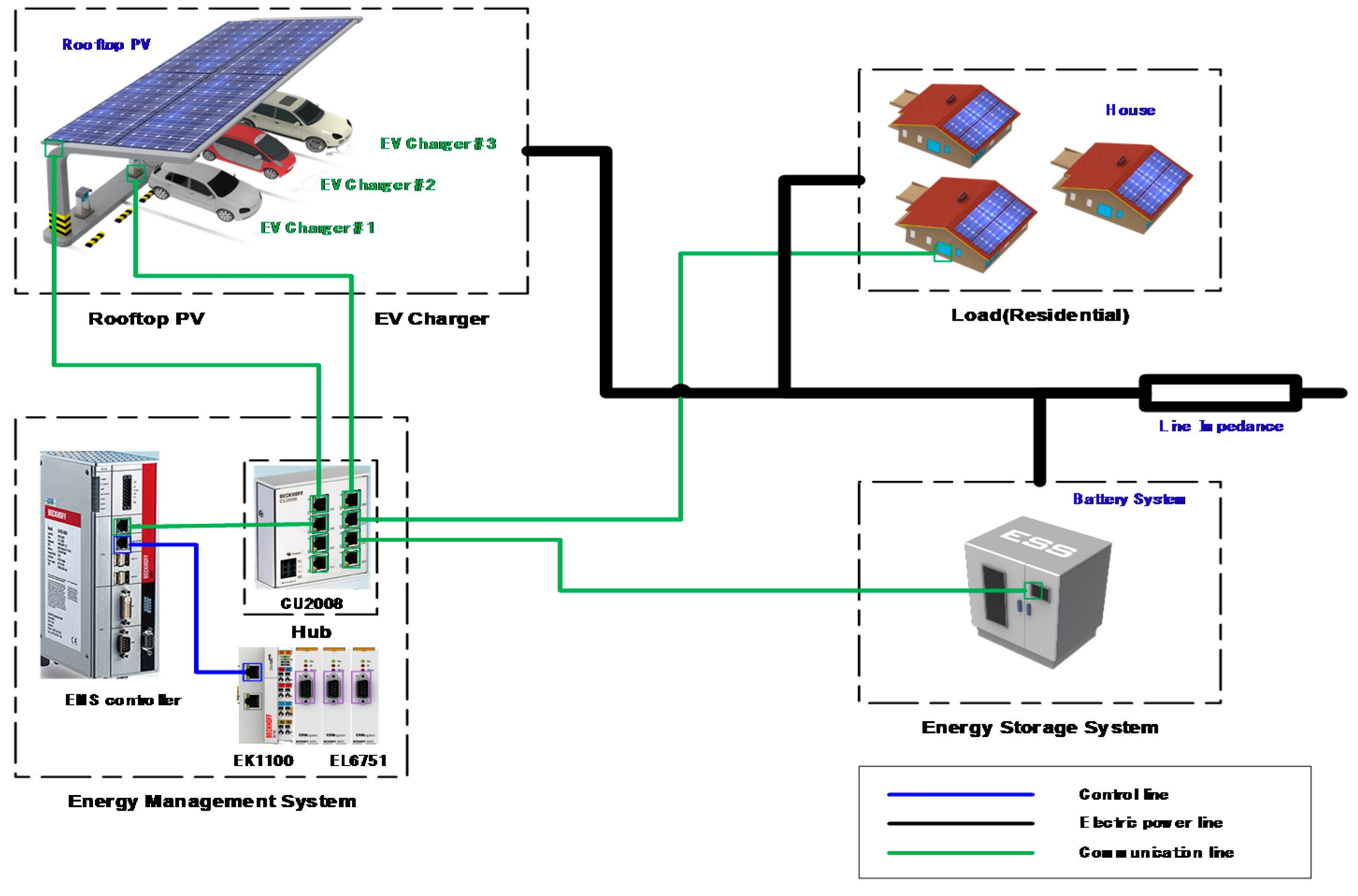
5. Modeling of Electric Vehicle Charging Infrastructure at the Secondary Feeder
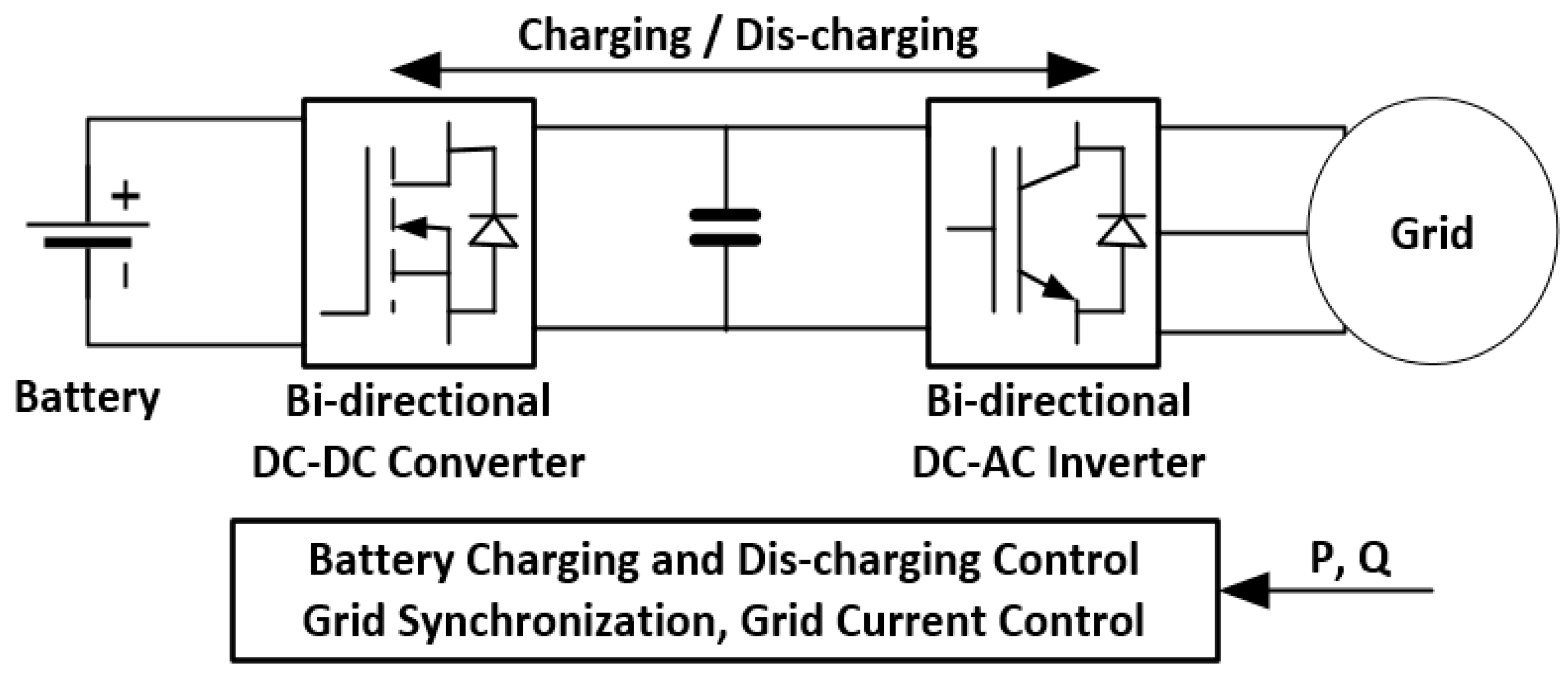
5.1. Battery Energy Storage System Modeling for Voltage Stabilization
5.2. Loads (Consumer) and EV Loads (Charging) Modeling
5.3. Photovoltaic Power Generation Modeling
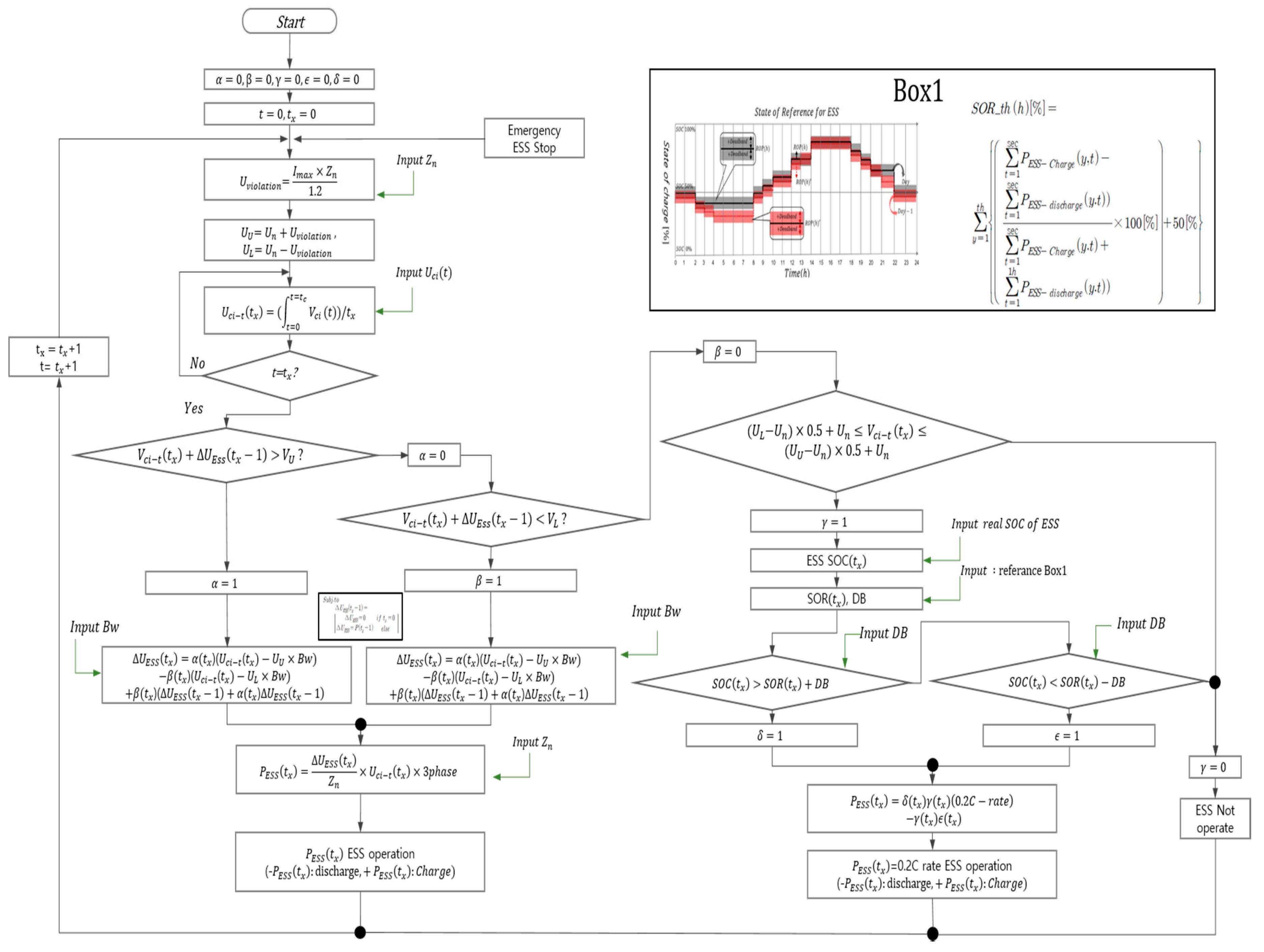
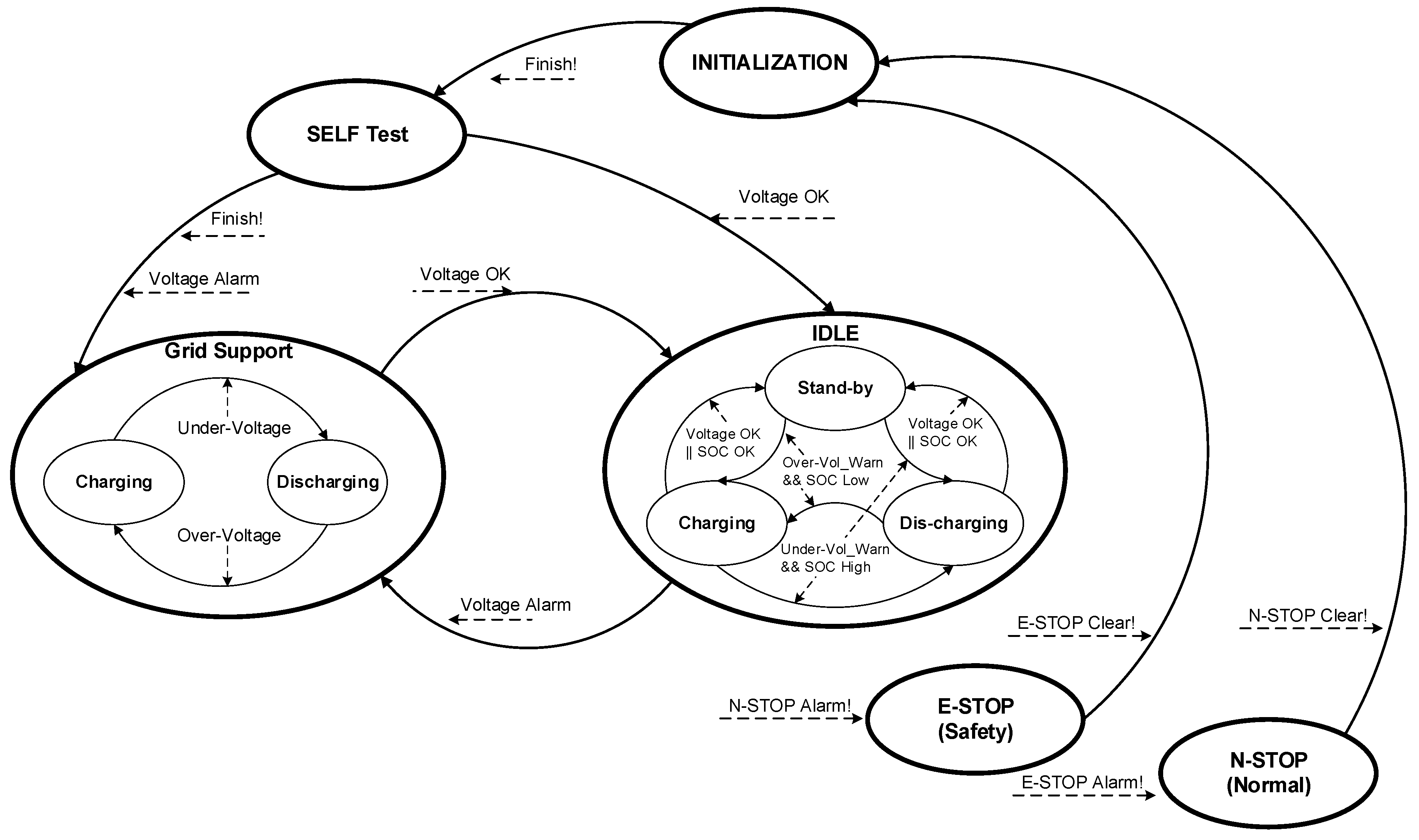
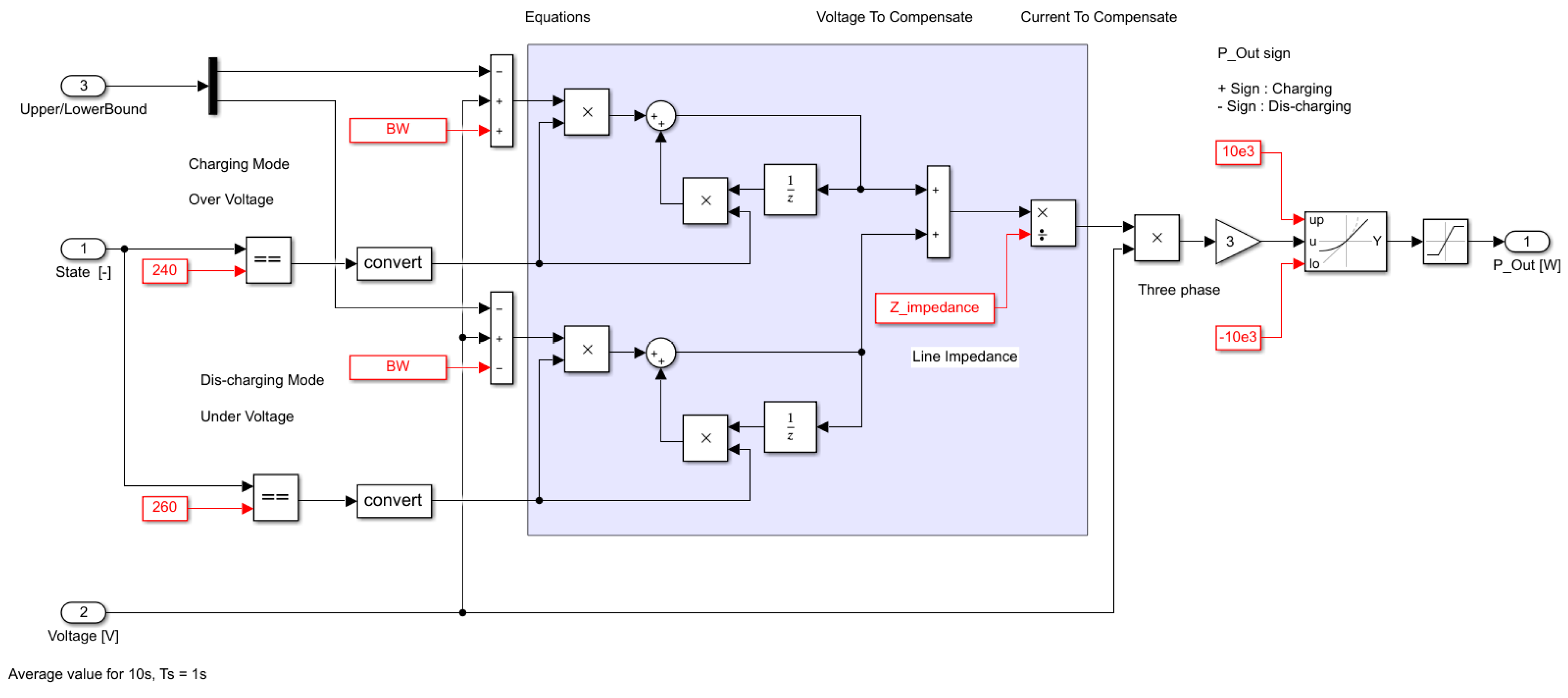
5.4. Control Algorithm Modeling
6. Case Studies
6.1. Performance Index
6.2. Simulation Condition
6.3. Analysis of the Secondary Feeder Voltage Characteristic by Voltage Stabilization Operation of ESS
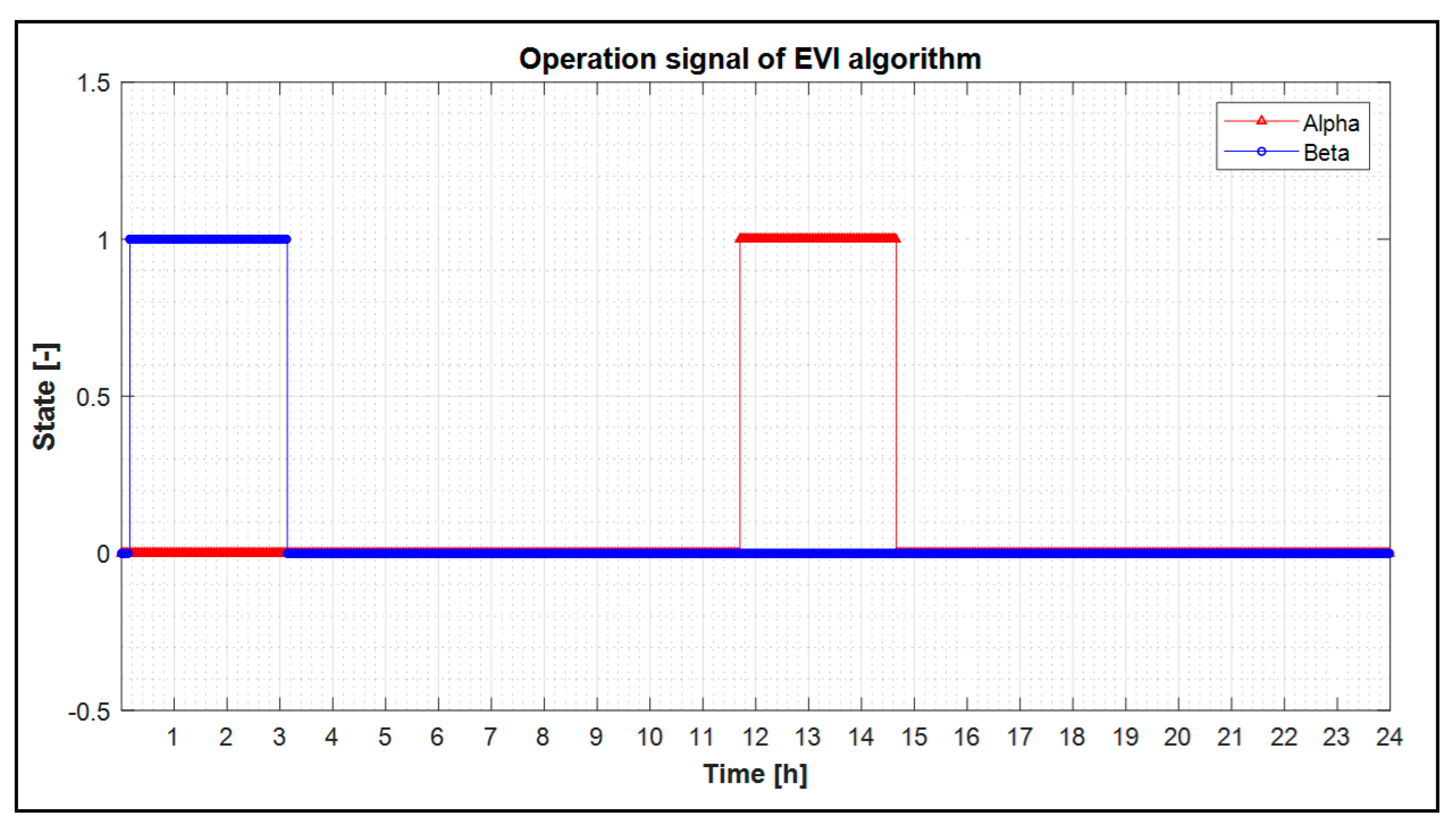
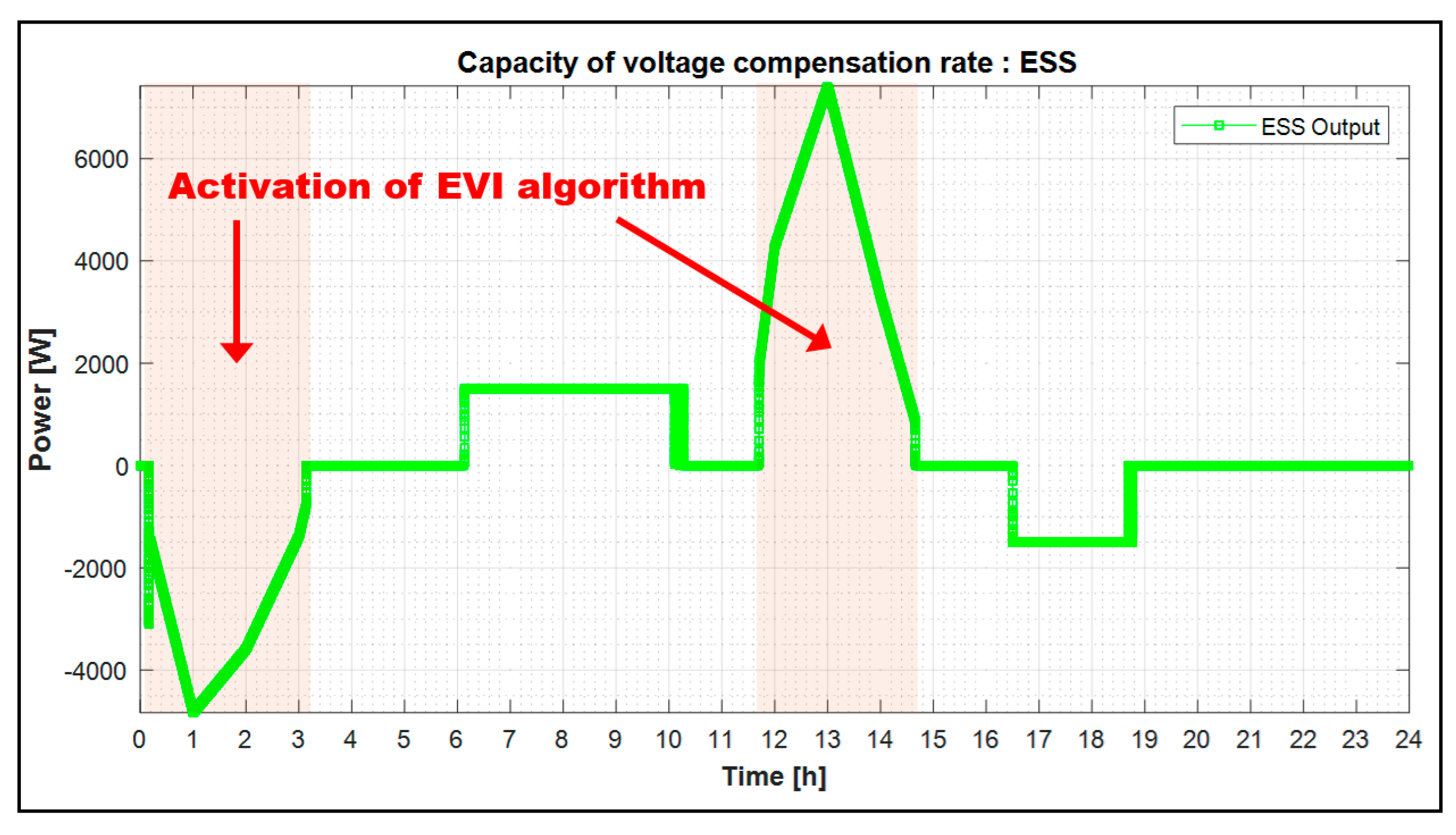
6.3.1. Verification of the EVI Algorithm for Voltage Stabilization Strategy
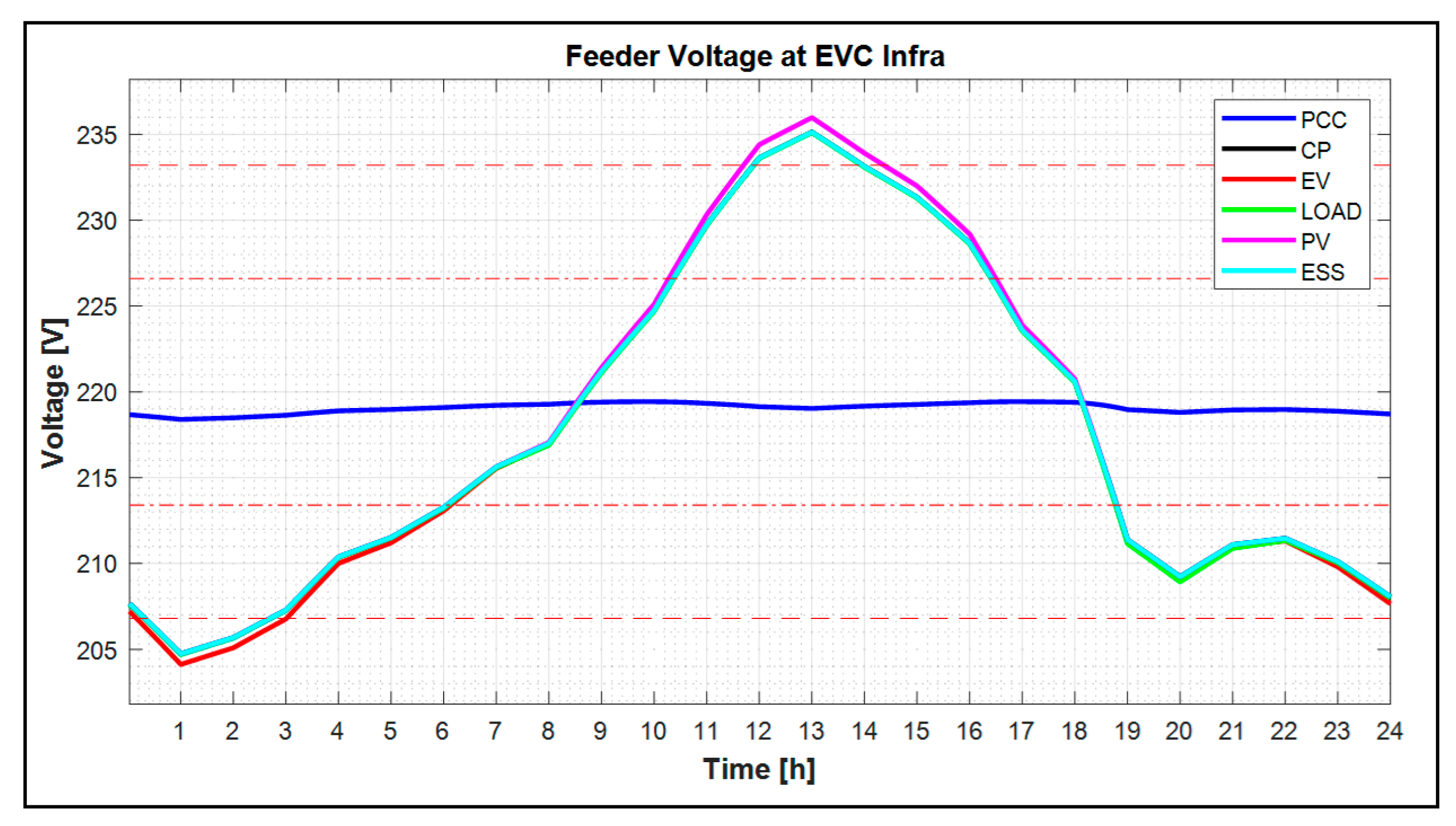
6.3.2. Analysis of the feeder voltage characteristic by the introduction of ESS
6.4. Analysis of the SOC Characteristic of ESS According to the Application of SOR Algorithm
6.4.1. Verification of the SOR Algorithm for Maintain of Proper SOC Operation Range of ESS
6.4.2. Analysis of the ESS SOC Characteristic by SOR Algorithm
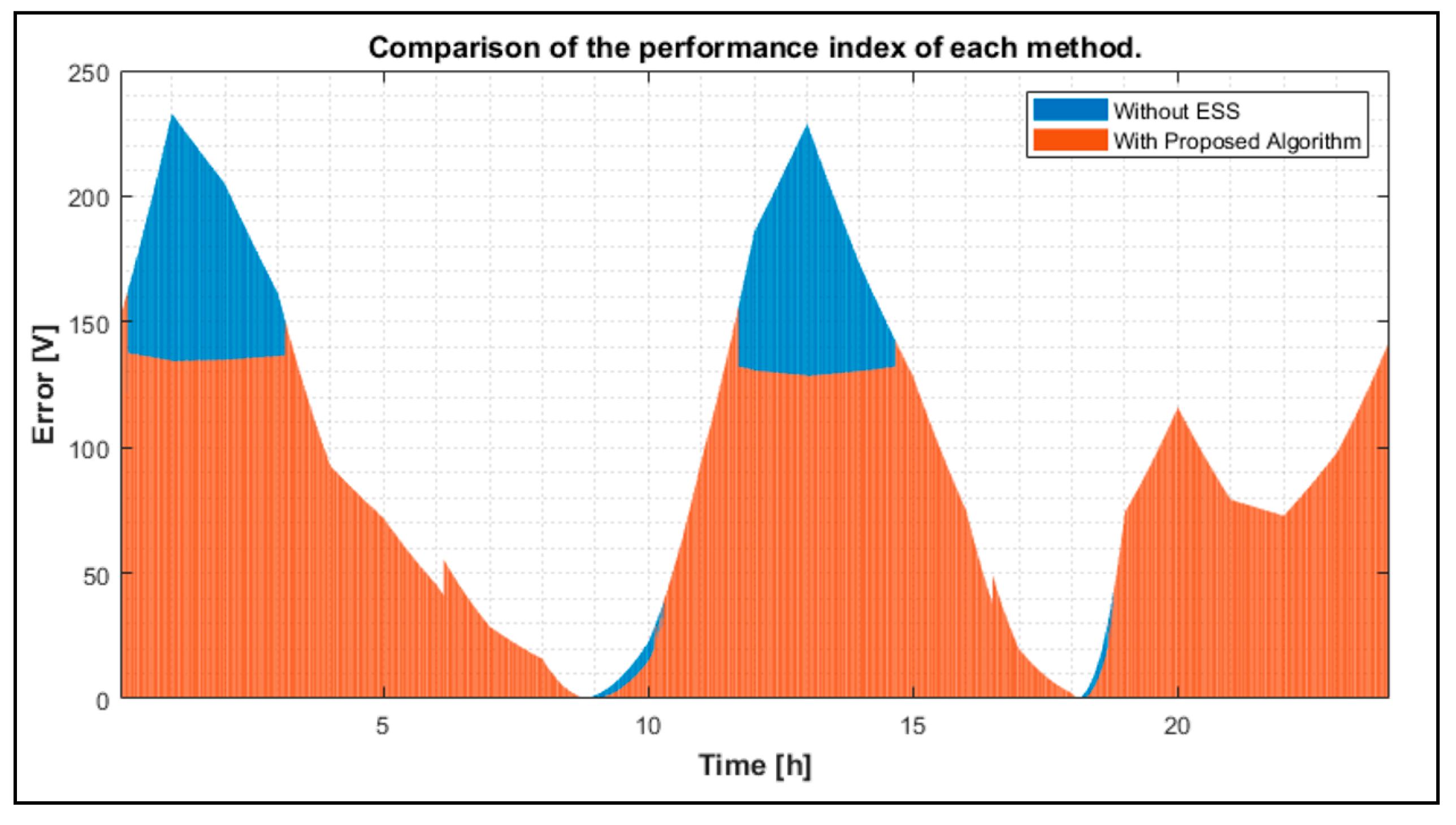
6.5. Performance Caluation for Feeder Voltage Characteristic
7. Conclusions
- (1)
- To operate the ESS introduced in the EVS infrastructure, this paper presented a method to determine the line impedance based on the voltage and the passing current on the existing secondary feeder with RES and EV infrastructure. Specifically, based on the least square method, the optimal line impedance value was determined by the relationship between the pole transformer voltage and the power common coupling voltage at the EVS infrastructure, including passing current.
- (2)
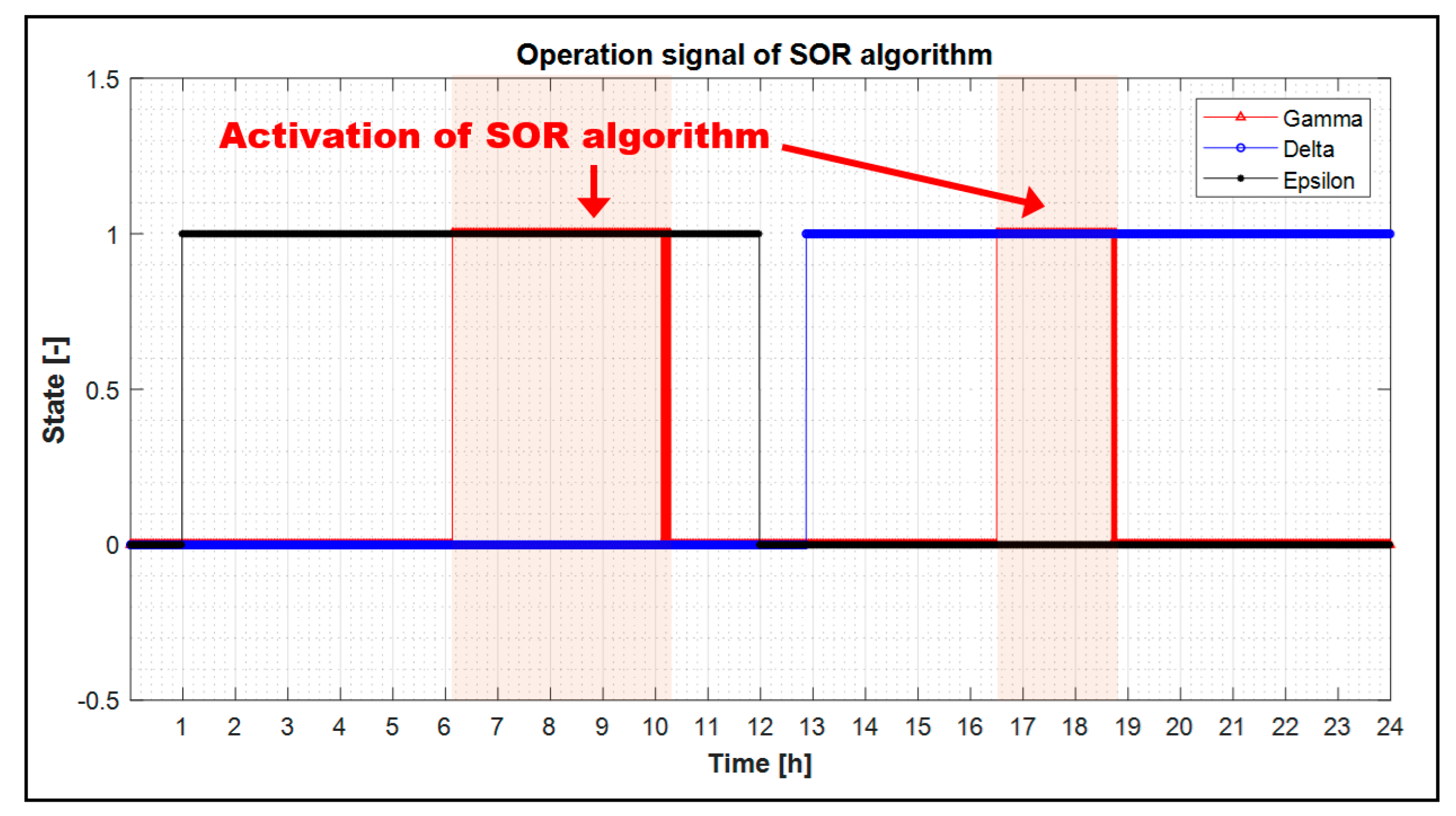
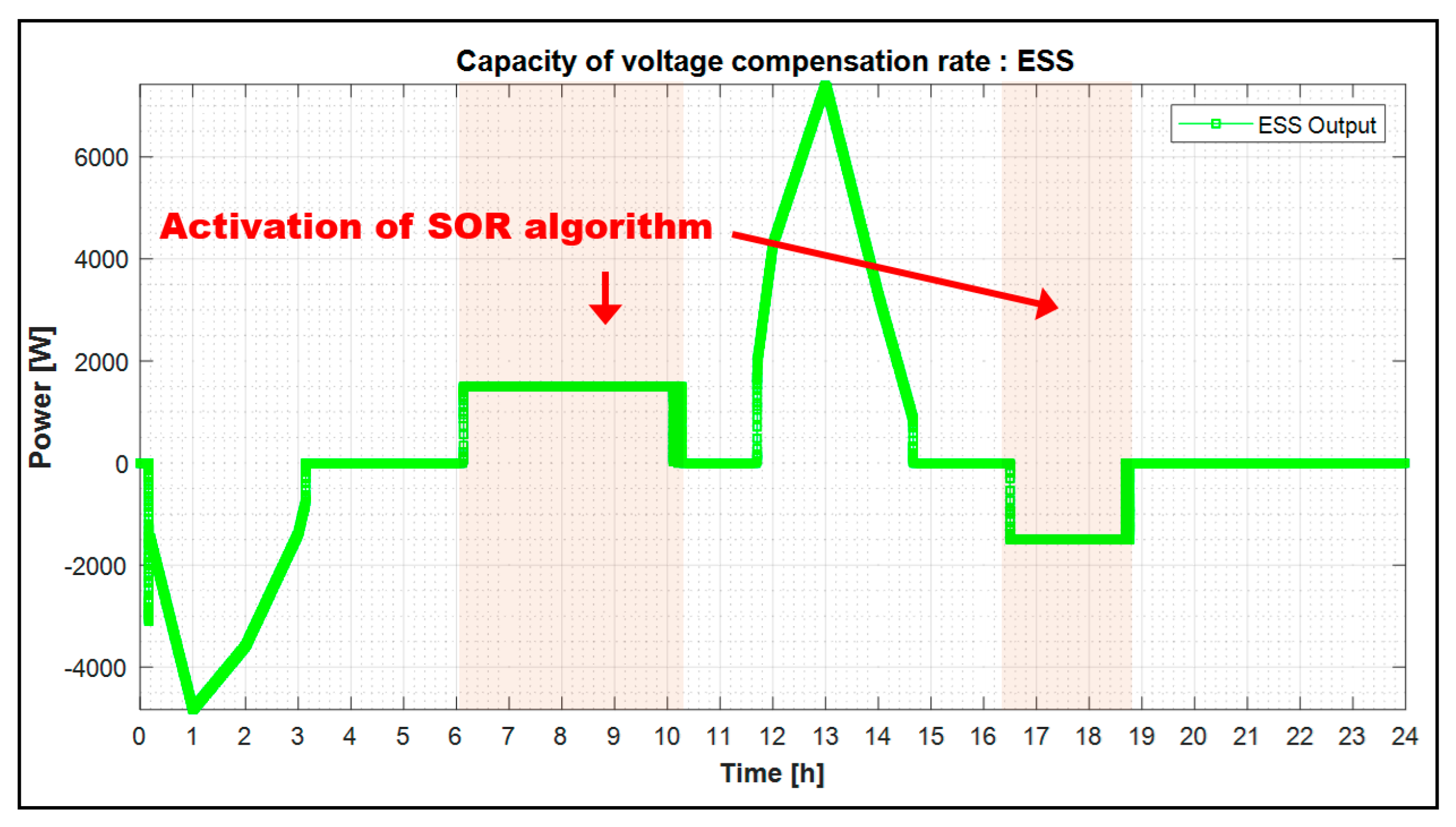
- To overcome voltage problems at the EVC infrastructure in the secondary feeder, a voltage compensation method by the ESS operation was proposed. The control characteristic of the ESS was analyzed for the voltage stabilization operation when the feeder voltage was not kept at an allowable limit. In this case, it is confirmed that ESS has been exactly controlled by the operation determination signal.
- (3)
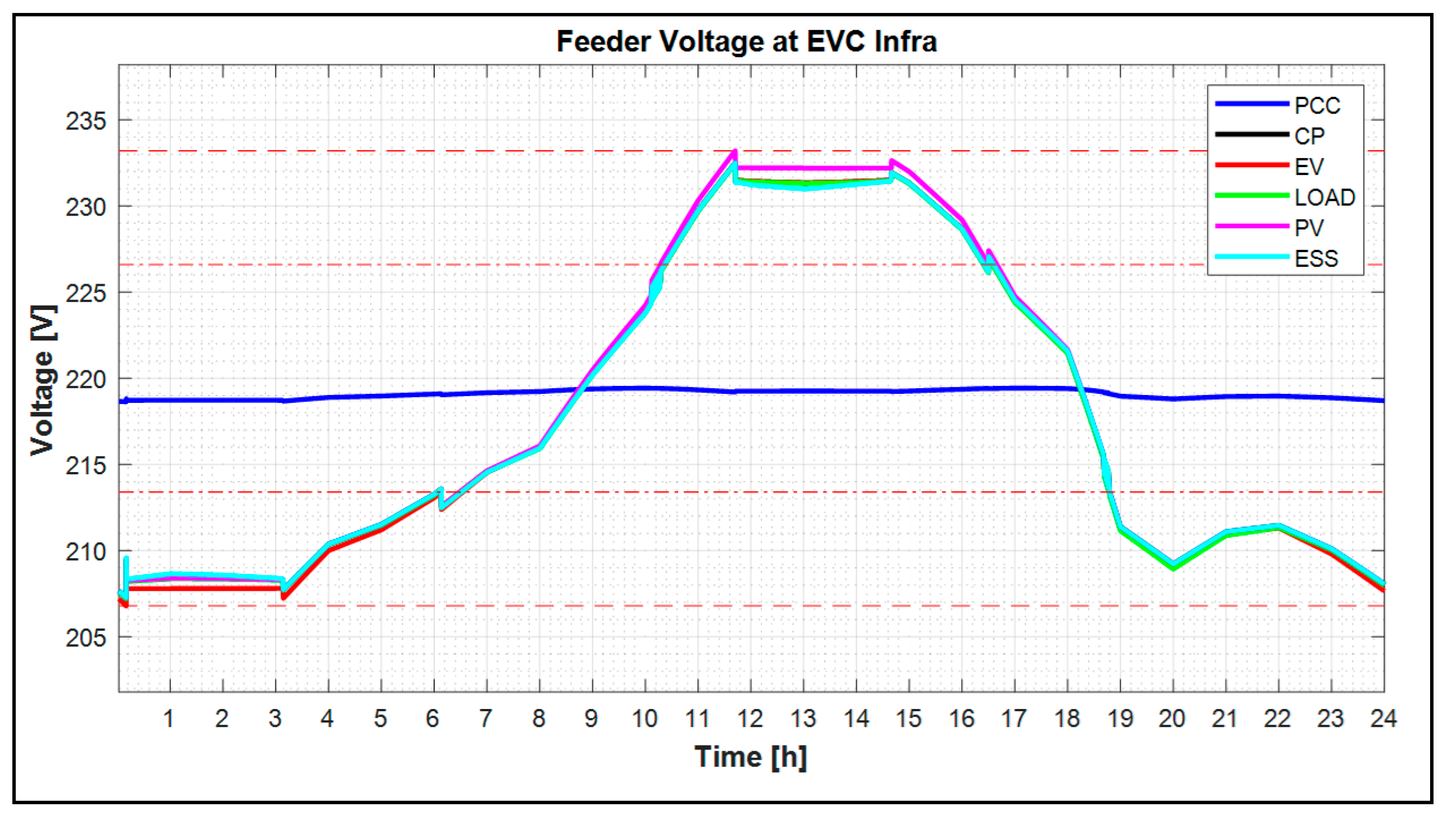
- Therefore, from the simulation results, it was confirmed that all of the feeder voltages at the PCC section, including all sections, could be perfectly maintained within the allowable limits by the EVI-algorithm of the ESS in case the feeder voltage could not be maintained to reasonable conditions (over/under voltage phenomena) by the maximum output of PV system, energy demands of the EVC, and load.
- (4)
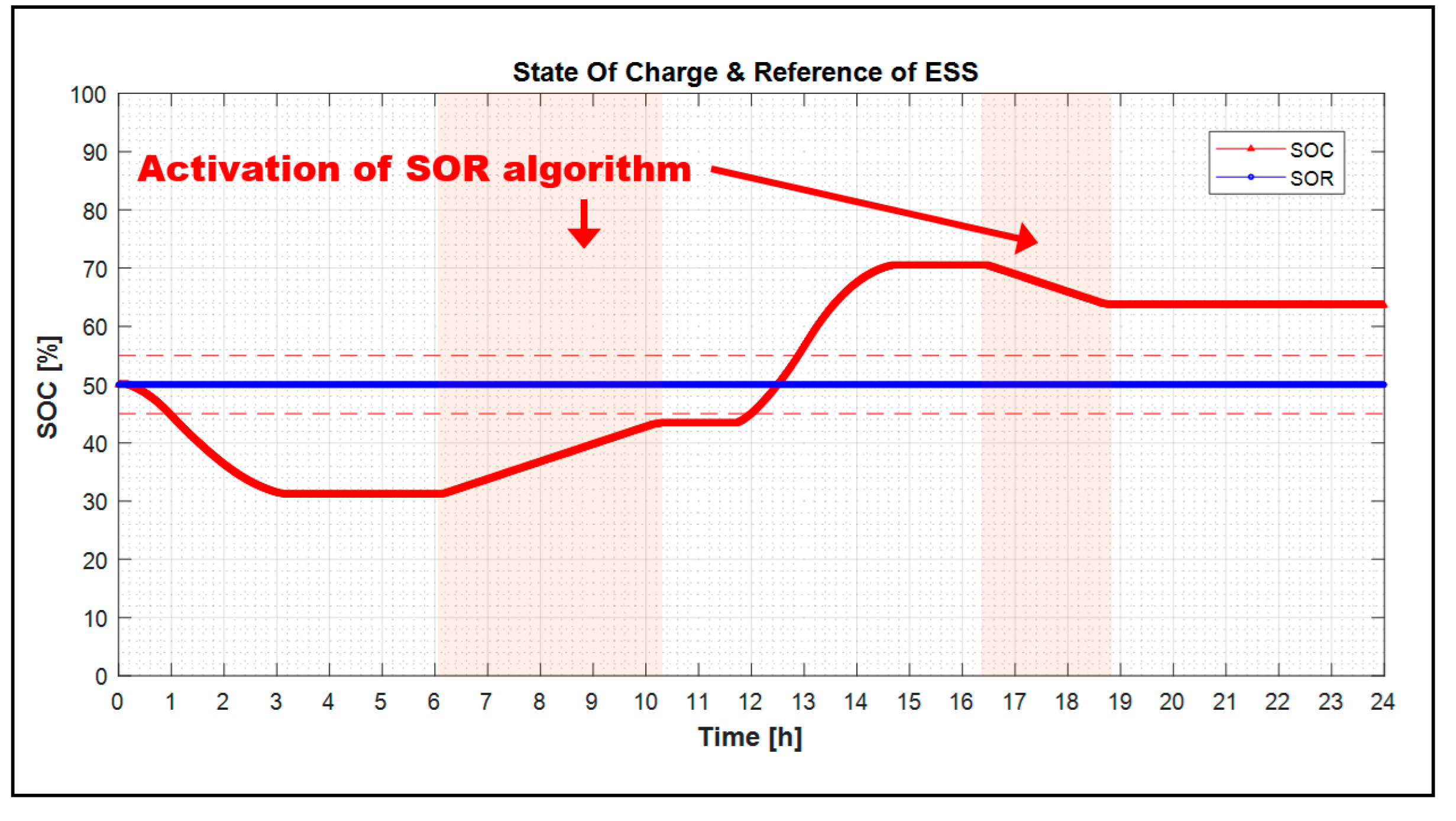
- When the ESS did not operate as a voltage stabilization function and the SOC of the ESS violated the set SOR range, the SOC pattern was varied by the operation characteristic of the ESS based on the operation signal of the SOR algorithm. Based on the simulation, it was confirmed the that this strategy is an effective tool to solve the no guarantee problems for operation papacy by the ESS.
- (5)
- Based on the result of the performance index base, it was clear that feeder voltages in the distribution system (secondary feeder) could be maintained within the allowable limits. Therefore, the case study results show that this strategy is an effective tool to solve the voltage problems by an ESS. However, since this proposed scheme operates based on centralized control concepts, it was necessary to well configure and operate the communication system with other components, such as inverters, chargers, and measurement devices.
- (6)
- This study was performed in a simulation environment with certain conditions. Therefore, in our future work, we will implement this algorithm in an EMS system and validate it in a real electric vehicle charging infrastructure. In addition, it is necessary to analyze the difference in the performance index according to the control period of the proposed algorithm and the effect of the change in capacity and combination of the EVC on the proposed algorithm.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| line impedance value | |
| liner regression method | |
| pole transformer voltage | |
| power common coupling voltage at EV infrastructure | |
| passing current at the secondary feeder | |
| Power factor at the secondary feeder | |
| ESS site (EV infra) section number of the secondary feeder | |
| measuring time | |
| error function | |
| total number of the time interval |
References
- Rubino, L.; Capasso, C.; Veneri, O. Review on plug-in electric vehicle charging architectures integrated with distributed energy sources for sustainable mobility. Appl. Energy 2017, 207, 438–464. [Google Scholar] [CrossRef]
- Madina, C.; Zamora, I.; Zabala, E. Methodology for assessing electric vehicle charging infrastructure business models. Energy Policy 2016, 89, 284–293. [Google Scholar] [CrossRef]
- Sbordone, D.; Bertini, I.; Di Pietra, B.; Falvo, M.C.; Genovese, A.; Martirano, L. EV fast charging stations and energy storage technologies: A real implementation in the smart micro grid paradigm. Electr. Power Syst. Res. 2015, 120, 96–108. [Google Scholar] [CrossRef]
- Serradilla, J.; Wardle, J.; Blythe, P.; Gibbon, J. An evidence-based approach for investment in rapid-charging infrastructure. Energy Policy 2017, 106, 514–524. [Google Scholar] [CrossRef]
- Dong, X.; Mu, Y.; Xu, X.; Jia, H.; Wu, J.; Yu, X.; Qi, Y. A charging pricing strategy of electric vehicle fast charging stations for the voltage control of electricity distribution networks. Appl. Energy 2018, 225, 857–868. [Google Scholar] [CrossRef]
- Leou, C.; Su, C.-L.; Lu, C.-N. Stochastic analyses of electric vehicle charging impacts on distribution network. IEEE Trans. Power Syst. 2014, 29, 1055–1063. [Google Scholar]
- Gray, M.K.; Morsi, W.G. Power quality assessment in distribution systems embedded with plug-in hybrid and battery electric vehicles. IEEE Trans. Power Syst. 2015, 30, 663–671. [Google Scholar] [CrossRef]
- Dubey, A.; Santoso, S.; Cloud, M.P.; Waclawiak, M. Determining time-of-use schedules for electric vehicle loads: A practical perspective. IEEE Power Energy Technol. Syst. J. 2015, 2, 12–20. [Google Scholar] [CrossRef]
- Weiller, C. Plug-in hybrid electric vehicle impacts on hourly electricity demand in the United States. Energy Policy 2011, 39, 3766–3778. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, C.; Wang, Z.; Liang, H. Research on time-of-use price applying to electric vehicles charging. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Tianjin, China, 21–24 May 2012; pp. 1–6. [Google Scholar]
- Shao, S.; Zhang, T.; Pipattanasomporn, M.; Rahman, S. Impact of TOU rates on distribution load shapes in a smart grid with PHEV penetration. In Proceedings of the IEEE PES T&D 2010, New Orleans, LA, USA, 19–22 April 2010; p. 16. [Google Scholar]
- Chen, Q.; Wang, F.; Hodge, B.M.; Zhang, J.; Li, Z.; Shafie-Khah, M.; Catalão, J.P. Dynamic Price Vector Formation Model-Based Automatic Demand Response Strategy for PV-Assisted EV Charging Stations. IEEE Trans. Smart Grid 2017, 8, 2903–2915. [Google Scholar] [CrossRef]
- Ying, J.; Ramachandaramurthy, V.K.; Miao, K.; Mithulananthan, N. Bi-directional electric vehicle fast charging station with novel reactive power compensation for voltage regulation. Int. J. Electr. Power Energy Syst. 2015, 64, 300–310. [Google Scholar] [CrossRef]
- Jiang, B.; Fei, Y. Decentralized scheduling of PEV on-street parking and charging for smart grid reactive power compensation. In Proceedings of the 2013 IEEE PES Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 24–27 February 2013; pp. 1–6. [Google Scholar]
- Li, S.; Bao, K.; Fu, X.; Zheng, H. Energy management and control of electric vehicle charging stations. Electr. Power Compon. Syst. 2014, 42, 339–347. [Google Scholar] [CrossRef]
- Beykverdi, M.; Jalilvand, A.; Ehsan, M. Cooperative Energy Management of Hybrid DC Renewable Grid Using Decentralized Control Strategies. Energies 2016, 9, 859. [Google Scholar] [CrossRef]
- Cubas, J.; Pindado, S.; Sorribes-Palmer, F. Analytical Calculation of Photovoltaic Systems Maximum Power Point (MPP) Based on the Operation Point. Appl. Sci. 2017, 7, 870. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Major Contents | Advantages | Disdvantages |
|---|---|---|---|
| [5,12] | Charging price method is used considering the voltage deviation | User friendly with economic approach Real-time price update | Slow response to voltage variation |
| [6,7,8,9,10,11] | Time-of-use pricing (TOU) scheme is introduced to decrease the peak load demand and alleviate overload | User friendly with economic approach | Slow response to voltage variation |
| [13,14,15] | Fast-charging process control scheme to control power quality (DC/DC) | Fast response to voltage variation | Customized components (power converter, EV charger) |
| Classification | Signal Condition | ||||
|---|---|---|---|---|---|
| Charging operation of voltage stabilization | 1 | 0 | - | - | - |
| Discharging operation of voltage stabilization | 0 | 1 | - | - | - |
| Charging operation within SOR range | 0 | 0 | 1 | 0 | 1 |
| Discharging operation within SOR range | 0 | 0 | 1 | 1 | 0 |
| Not operation | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | |
| 0 | 0 | 0 | 1 | 0 | |
| 0 | 0 | 0 | 0 | 1 | |
| Section Number | Impedance | Length (km) | Power Factor | Load (kW) | RES (PV System) (kW) | EV Charger (kW) | |
|---|---|---|---|---|---|---|---|
| R (Ω/km) | X (Ω/km) | ||||||
| 1 (total) | 0.40 | 0.027 | 1 | 1 | 0–15.0 | 0–30.0 | 0–18.9 |
| 1-1 (load) | 0.40 | 0.027 | 0.03 | 1 | 0–15.0 | - | - |
| 1-2 (RES) | 0.40 | 0.027 | 0.05 | 1 | - | 0–30.0 | - |
| 1-3 (EVC) | 0.40 | 0.027 | 0.05 | 1 | - | - | 0–18.9 |
| 1-4 (ESS) | 0.40 | 0.027 | 0.08 | 1 | - | - | - |
| Not Operation of ESS | ESS Operation | |
|---|---|---|
| Performance index value |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-J.; Ryu, K.-S.; Ko, H.-S.; Kim, B. Optimal Operation Strategy of ESS for EV Charging Infrastructure for Voltage Stabilization in a Secondary Feeder of a Distribution System. Energies 2020, 13, 179. https://doi.org/10.3390/en13010179
Kim D-J, Ryu K-S, Ko H-S, Kim B. Optimal Operation Strategy of ESS for EV Charging Infrastructure for Voltage Stabilization in a Secondary Feeder of a Distribution System. Energies. 2020; 13(1):179. https://doi.org/10.3390/en13010179
Chicago/Turabian StyleKim, Dae-Jin, Kyung-Sang Ryu, Hee-Sang Ko, and Byungki Kim. 2020. "Optimal Operation Strategy of ESS for EV Charging Infrastructure for Voltage Stabilization in a Secondary Feeder of a Distribution System" Energies 13, no. 1: 179. https://doi.org/10.3390/en13010179
APA StyleKim, D.-J., Ryu, K.-S., Ko, H.-S., & Kim, B. (2020). Optimal Operation Strategy of ESS for EV Charging Infrastructure for Voltage Stabilization in a Secondary Feeder of a Distribution System. Energies, 13(1), 179. https://doi.org/10.3390/en13010179