In recent years, most developed countries have been using renewable energy sources to supply their energy. These sources include wind energy, geothermal energy, biomass, and, most importantly, solar energy. The amount of solar energy that the Earth receives in a single day is several times the annual energy consumption of everyone on Earth [
1]. This has led to an increase in the installation of photovoltaic systems. The advantage of solar energy over other renewable energies is its stability and availability in most places [
2]. Furthermore, photovoltaic arrays are suitable for most applications because they do not produce air pollutants and have low maintenance costs [
3,
4]. Currently, the most significant obstacle to the commercialization of photovoltaic systems is the high cost of the initial investment. In order to reduce the ratio of output power to the unit cost, photovoltaic arrays must generate the maximum power. One of the ways to maximize power from photovoltaic arrays is to use maximum power point tracking (MPPT) algorithms [
5,
6,
7].
To maximize power from photovoltaic arrays, many MPPT techniques have been developed, the most popular being hill climbing (HC), perturb and observe (P&O), and incremental conductance (InC) algorithms. In addition to these three methods, the open-circuit voltage tracking algorithm and the short-circuit algorithm were also proposed. However, since the accuracy of these two methods in tracking the maximum power point is low, they were not given much attention [
8,
9]. The reason for the popularity of the HC algorithm is its simplicity and easy implementation. In this method, the power value is continuously compared to the previous value, and according to the result of the two power comparisons, the value of the step size changes is determined for each moment until the maximum power point is detected and then starts to oscillate around of this point [
10,
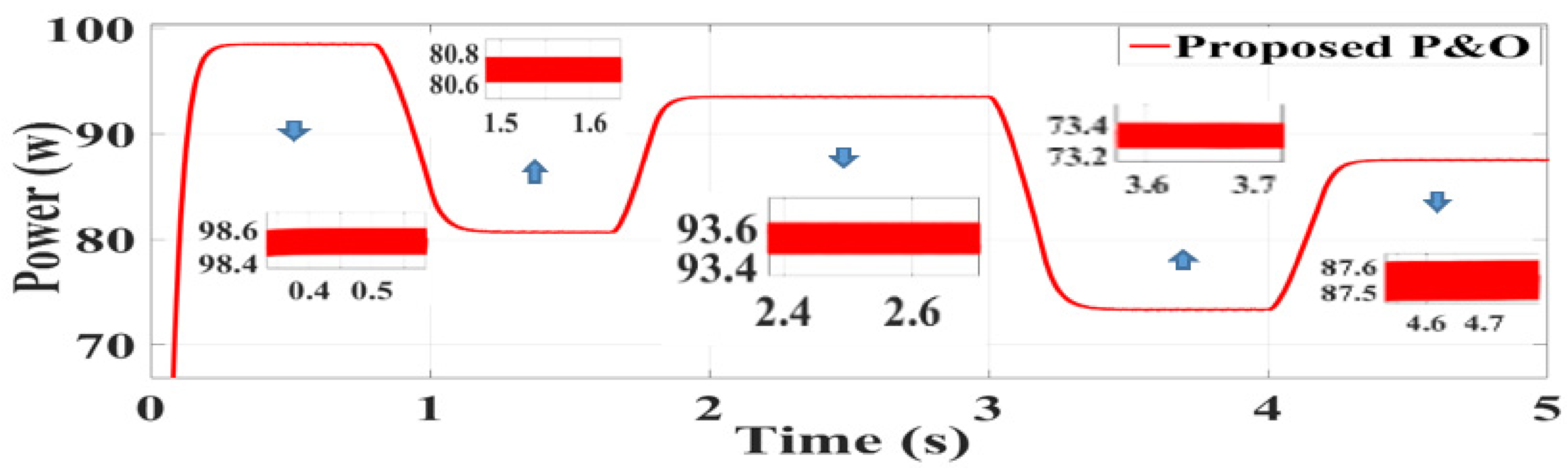
11]. As the name of the perturbation and observation (P&O) algorithm implies, the algorithm perturbs
Vpv and observes the effect of this change on the output power of the photovoltaic system. This method is extensively used in MPPT because it is uncomplicated, and it requires only measurements of
Vpv and
Ipv. The disadvantage of P&O is that if the irradiance changes quickly, the tracking path will deviate significantly, and, subsequently, the losses will increase [
12,
13,
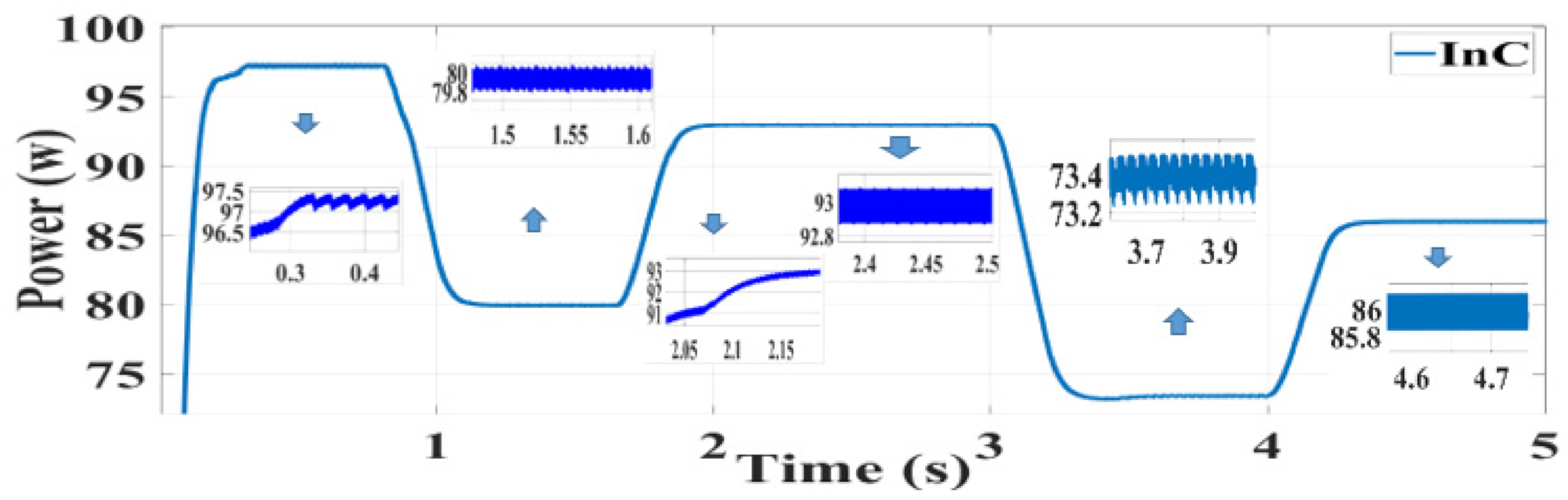
14]. The InC technique operates according to the slope of the
P–V curve. It has the advantage of traceability accuracy and low oscillation around the MPP for maximum power point tracking. However, this algorithm is more complicated than the P&O method due to the division operations in its structure [
15,
16,
17]. The step size in all of these algorithms is constant, and its precise determination is important, because the small size of the step decreases the speed of the MPP tracking, and its large size increases the oscillations around the MPP. To solve this problem, the authors implemented many ideas by modifying common algorithms [
18,
19,
20], for example, the developed P&O algorithm [
21] and the modified InC method [
22], the self-adaptive incremental conductance algorithm [
23], the low-cost improved incremental conductance algorithm [
17], etc. In all of these methods, by improving the performance of the system under steady-state conditions, the performance of the system under dynamic conditions is reduced. To solve this problem, optimization tools, such as the spider monkey algorithm and the fuzzy logic control algorithm [
24,
25], as well as other methods, have been developed [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35]. However, these methods complicate system computations and, as a result, reduce tracking speed. For this reason, the development of tracking algorithms is of great importance.
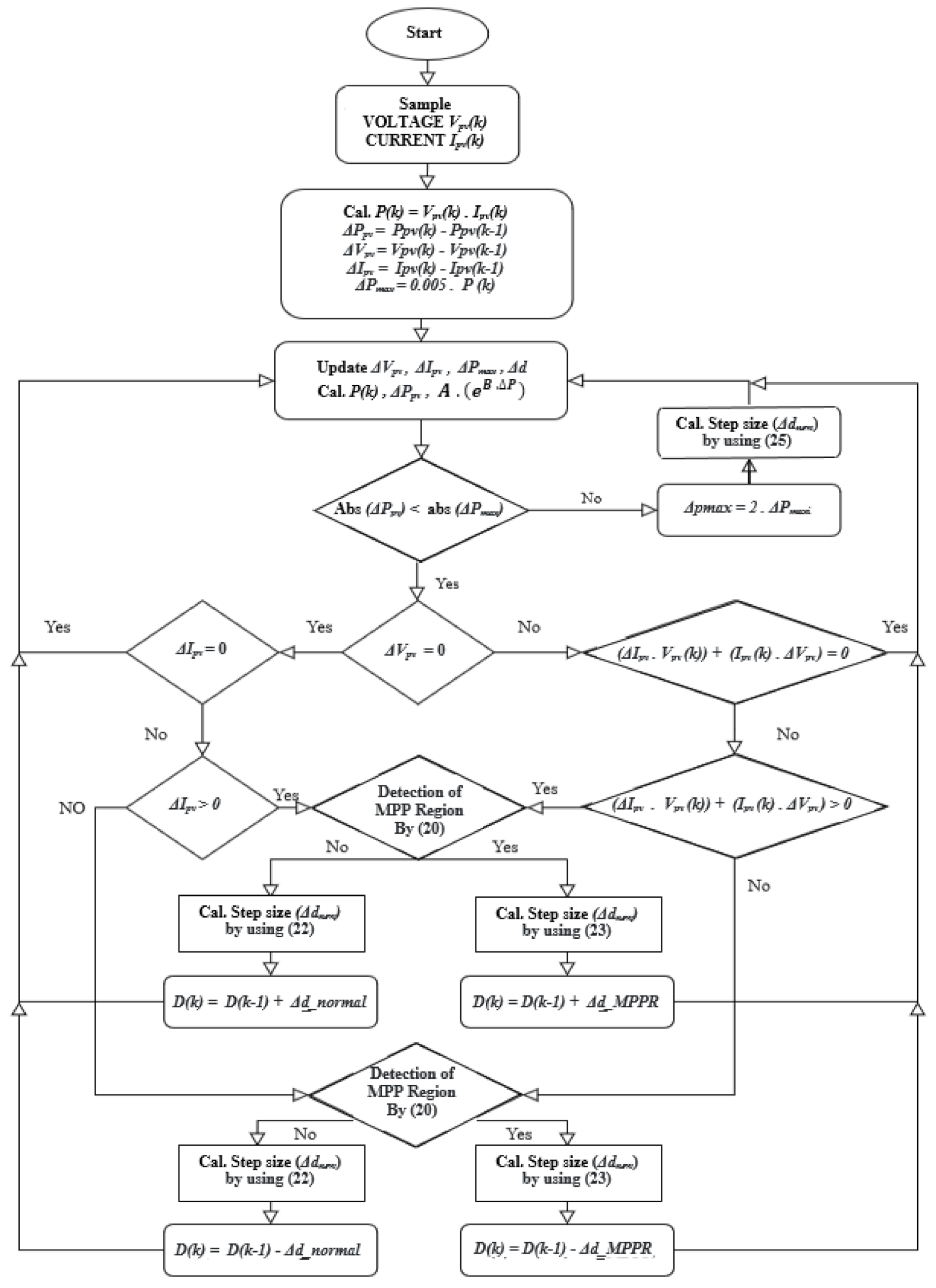
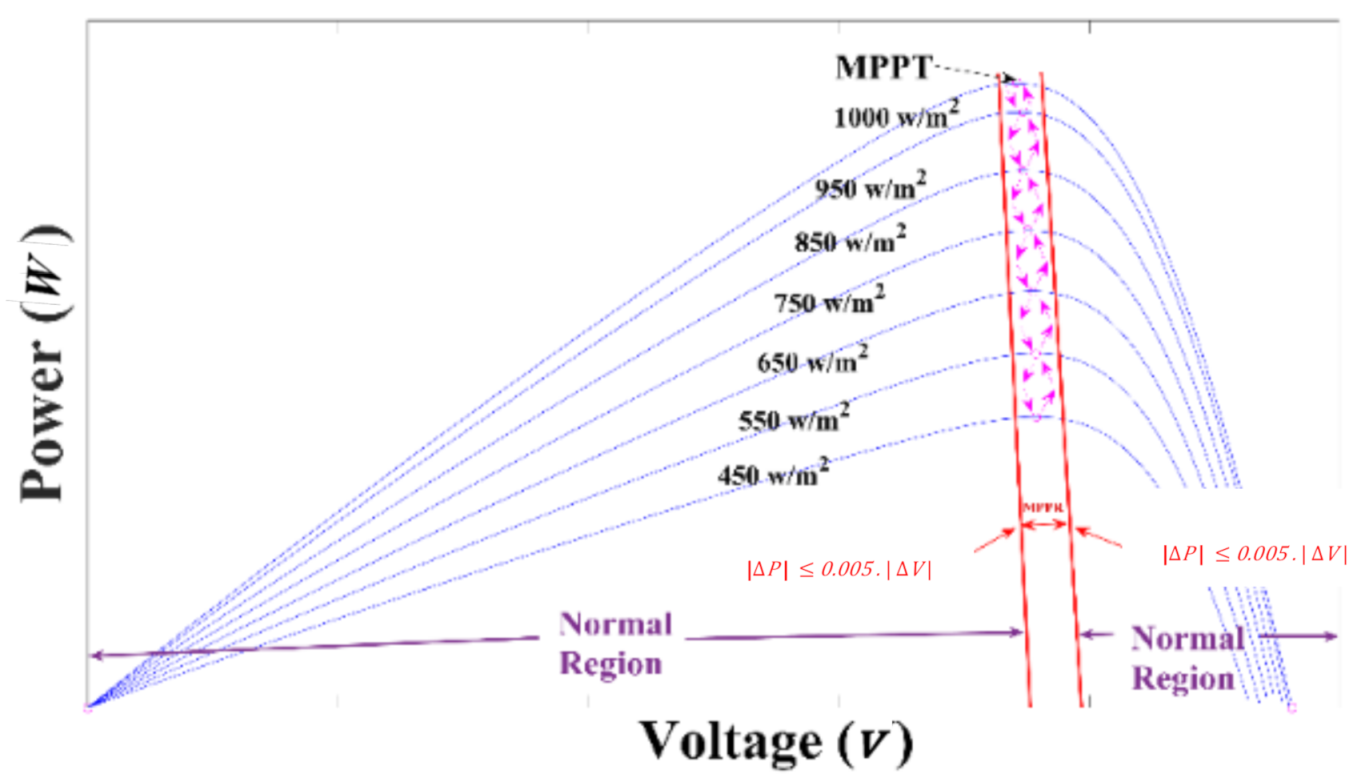
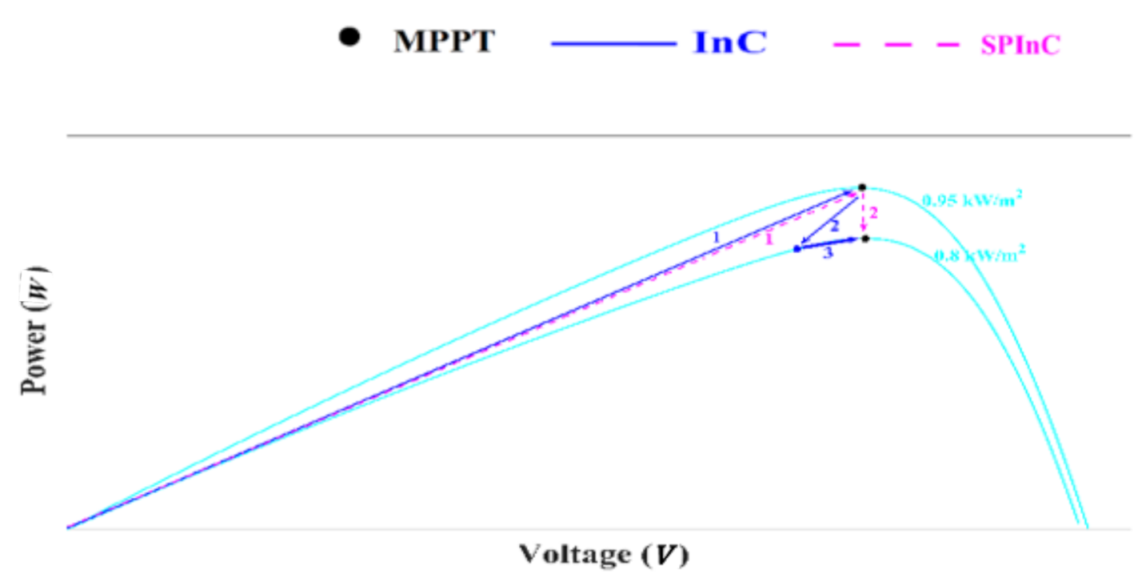
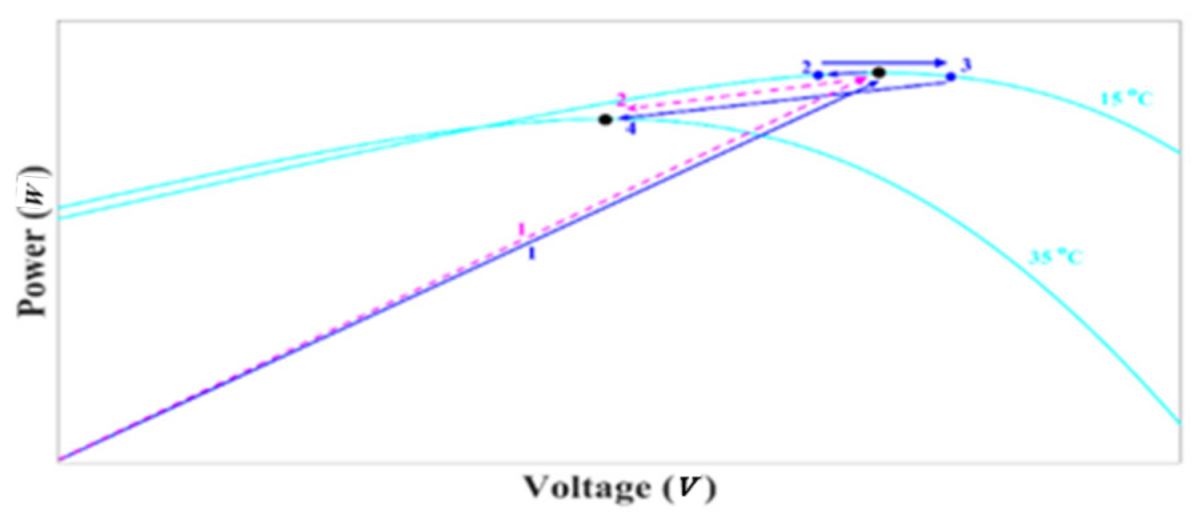
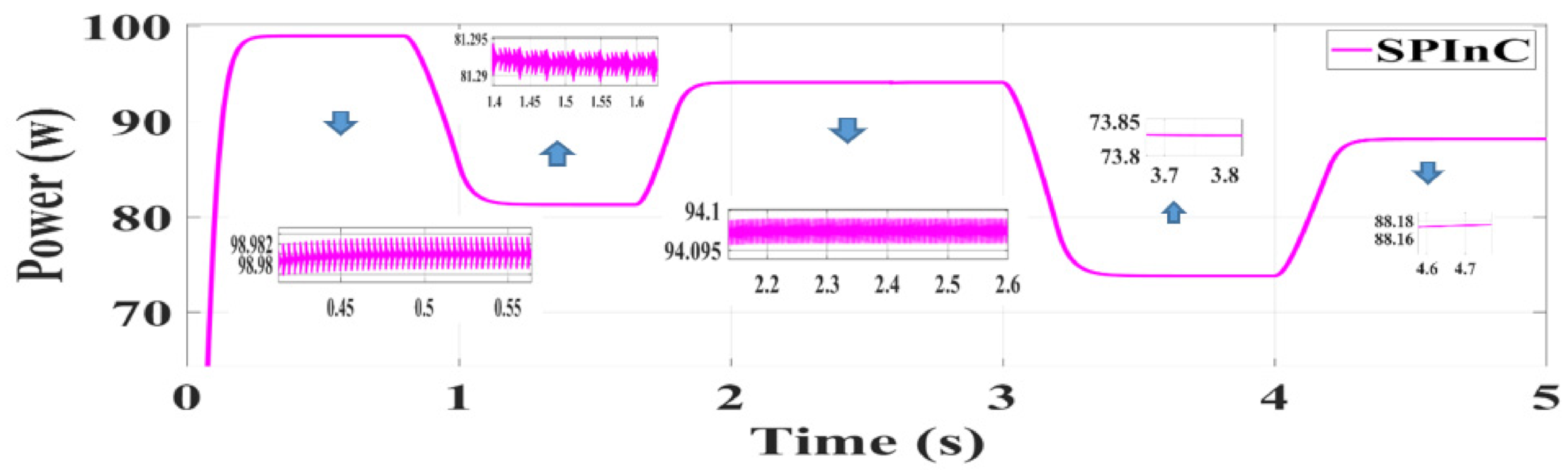
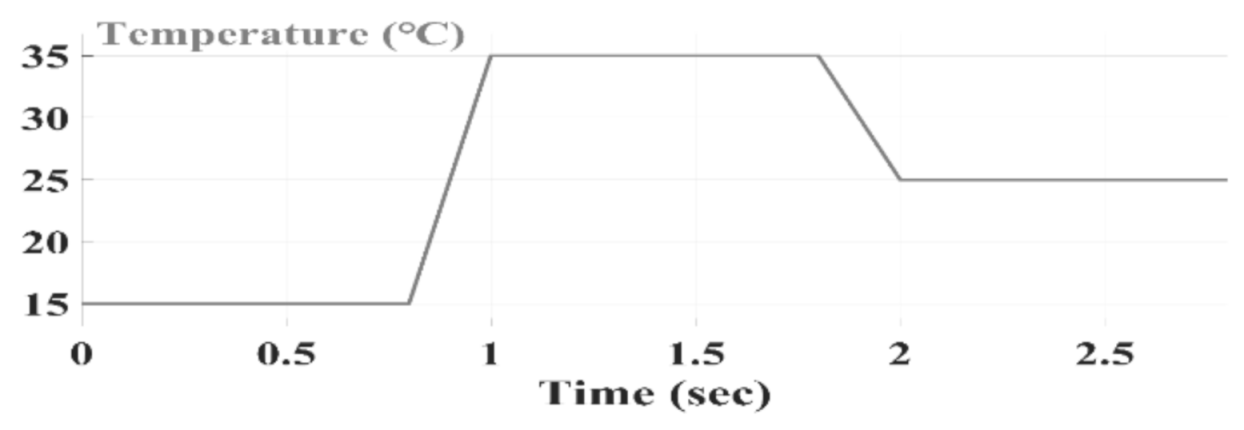
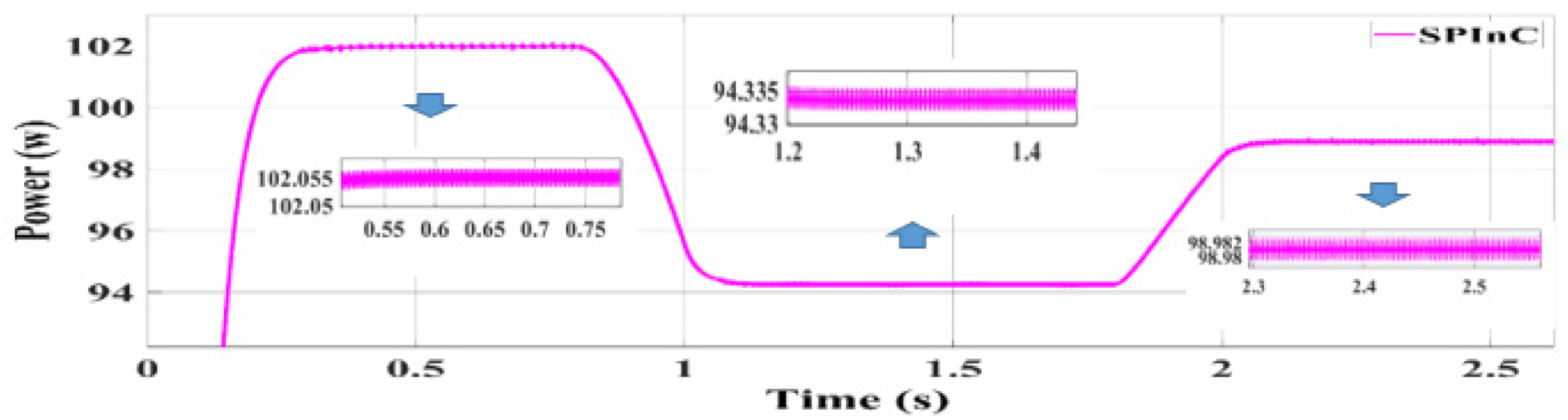
In this paper, a new version of the self-predictive incremental conductance (SPInC) algorithm is presented. The SPInC algorithm recognizes the operational region and is also capable of detecting dynamic conditions. In addition, it detects sudden changes in power caused by changes in the intensity of radiation or temperature. By selecting the appropriate step size, it receives the maximum power from the panel at any moment. The improved algorithm reduces output power ripple and increases the efficiency of the system by detecting the operating area and selecting the appropriate step size for each region. The SPInC algorithm divides the system’s work areas into three operating zones. It calculates the size of the appropriate step changes for each region after identifying each region, which allows for more accurate tracking of the MPP and increases the system efficiency at a speed equal to the speed of the conventional method. These additional operations have not resulted in system slowdown in tracking maximum power. Furthermore, system implementation is simplified by removing the division operations from the conventional algorithm structure extracted from [
17]. Thus, SPInC is a good tool to determine the maximum power point, with higher efficiency and lower oscillation around the MPP than other methods. The simulation results show the competence of the SPInC algorithm.
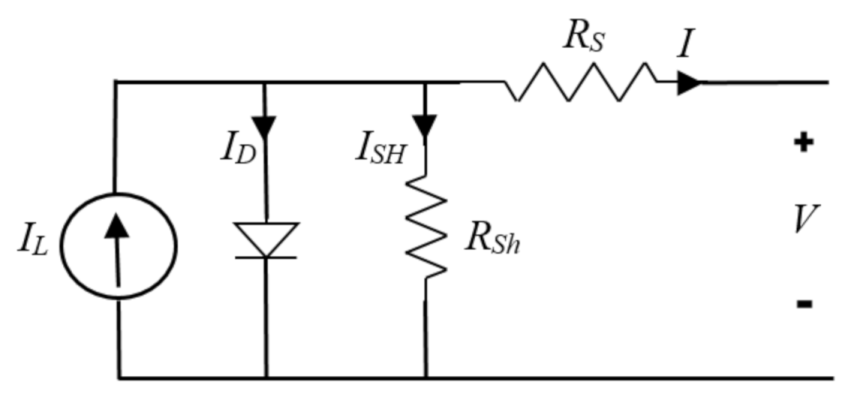
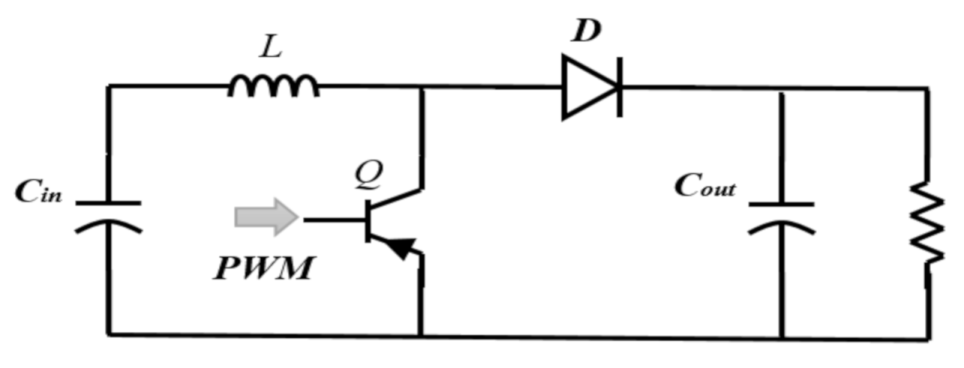
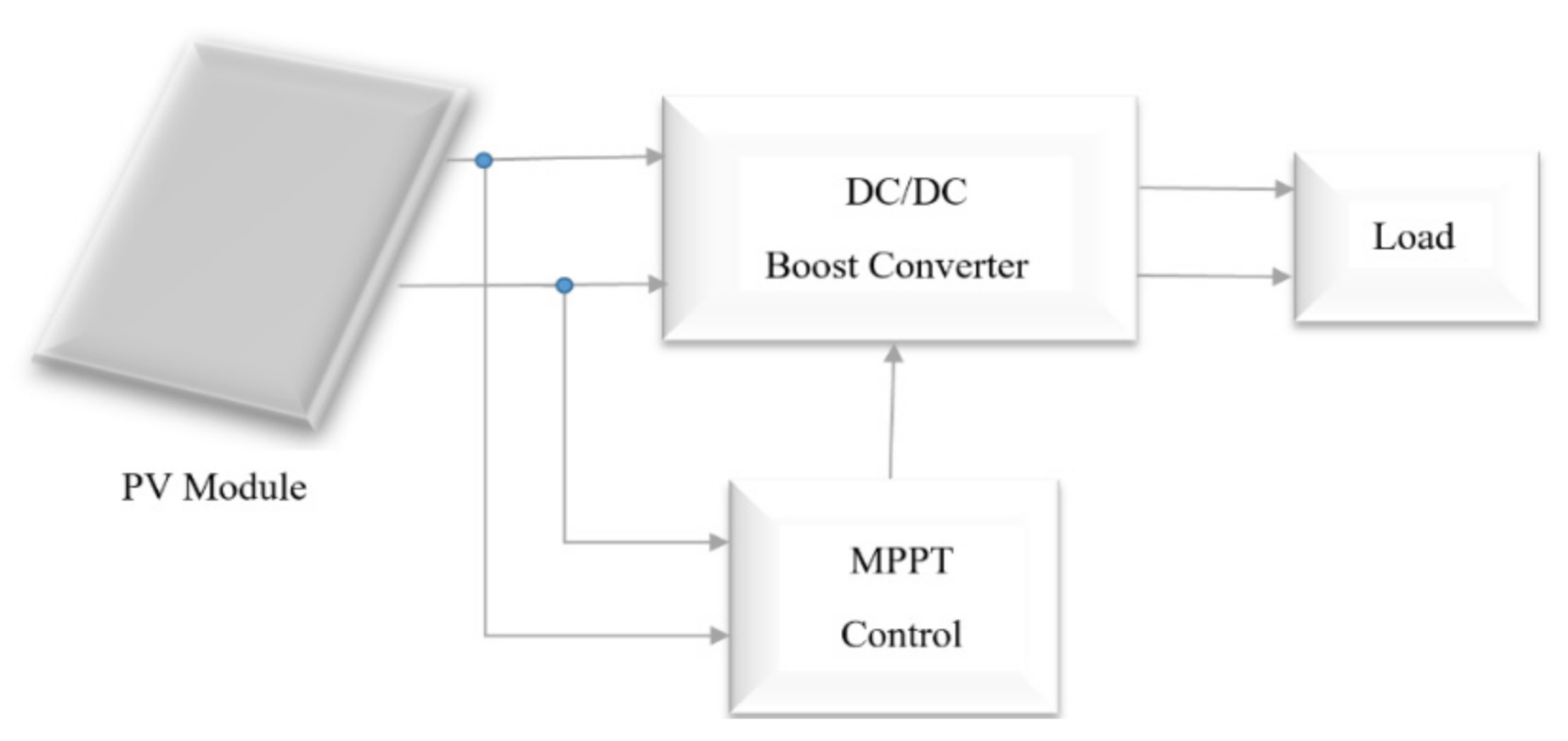
This paper consists of six sections: first, the PV system is introduced, which includes PV modeling and introducing the DC/DC converter structure; in the third section, the conventional InC and the free-division InC are discussed, and in the fourth section, the proposed SPInC is comprehensively explained;
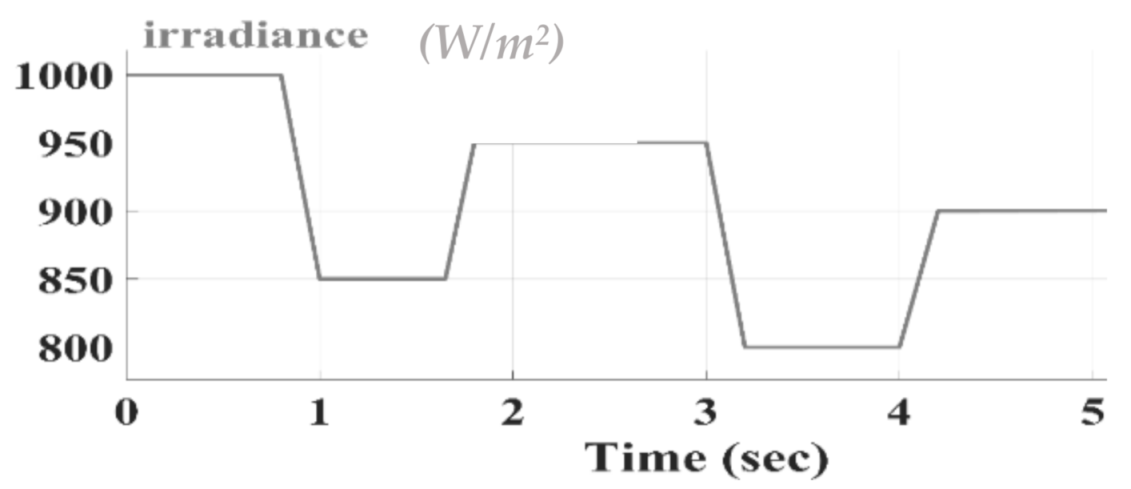
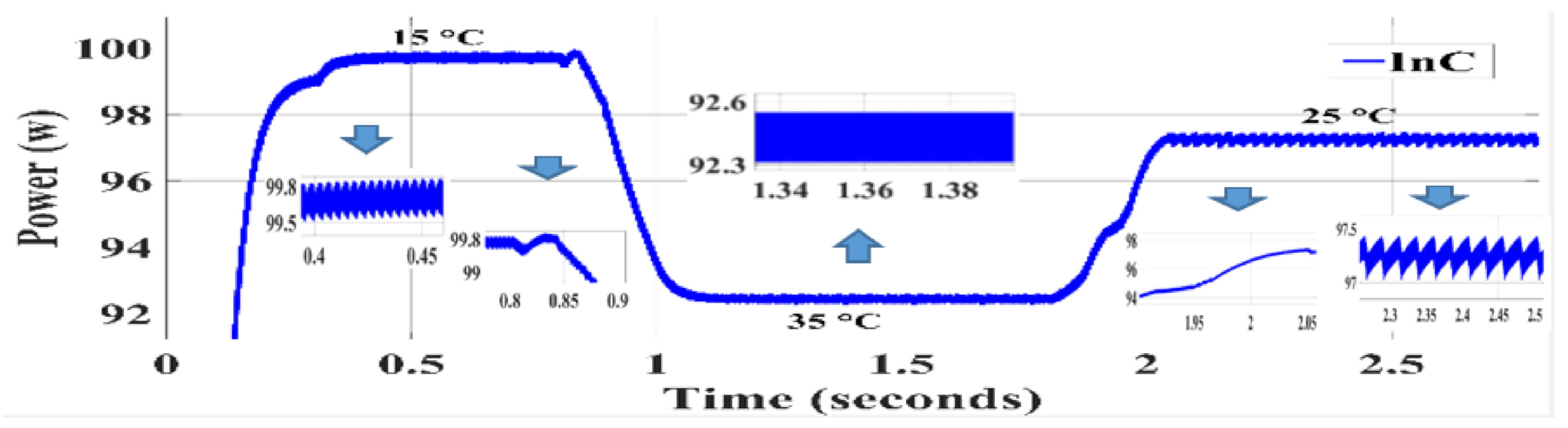
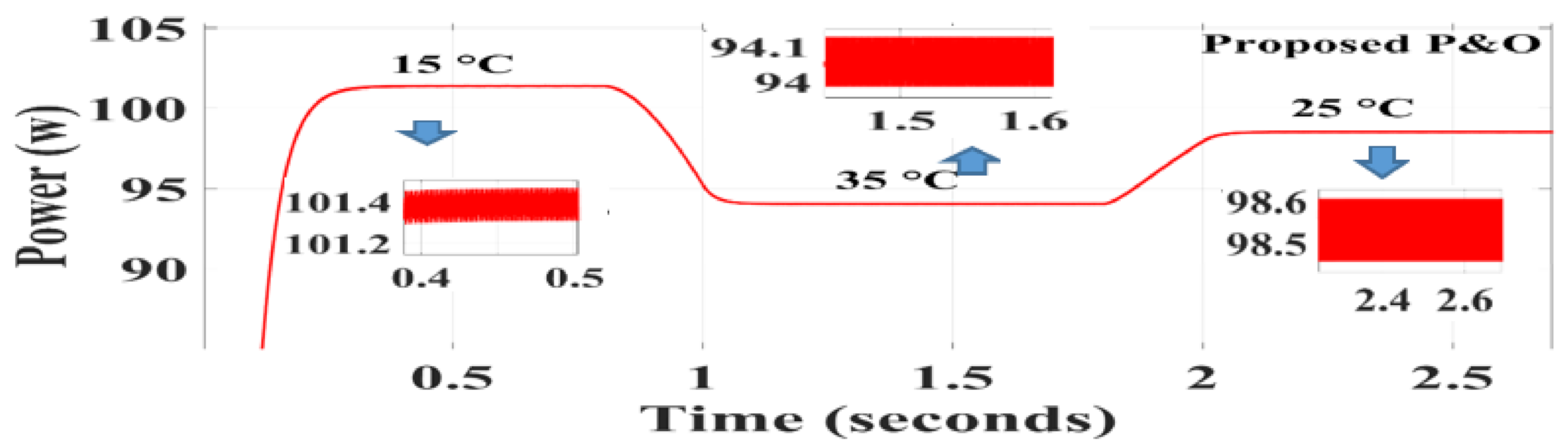
Section 5 shows the simulation results, in which the SPInC is compared with the conventional InC and proposed P&O; the sixth section is the conclusion.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}