
Robust Control and Optimization Method for Single-Phase Grid-Connected Inverters Based on All-Pass-Filter Phase-Locked Loop in Weak Grid

Abstract
:
1. Introduction
2. Stability Analysis for GCI Considering MFOF-PLL
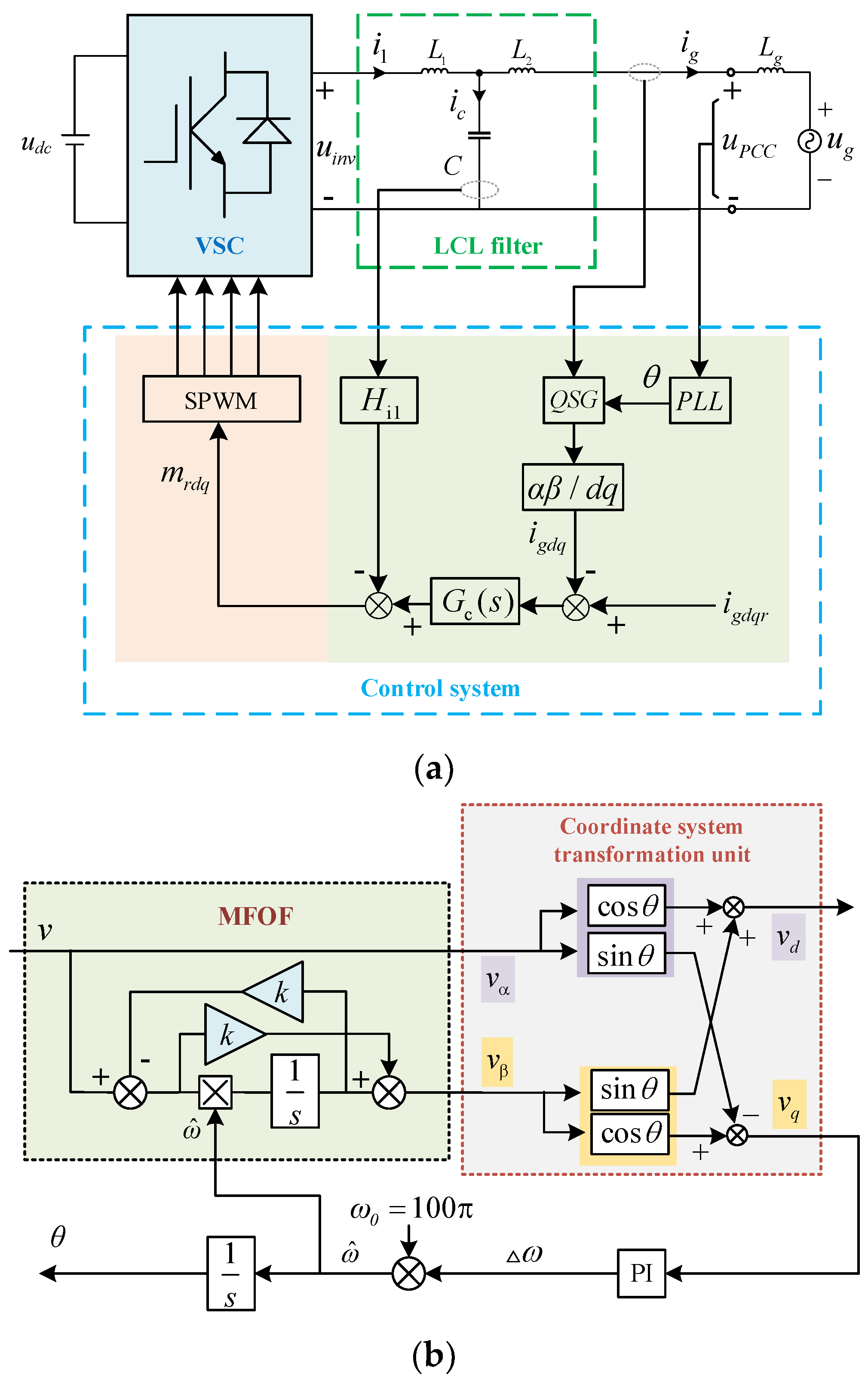
2.1. Small-Signal Impedance Model of the Inverter under Multiple Perturbation
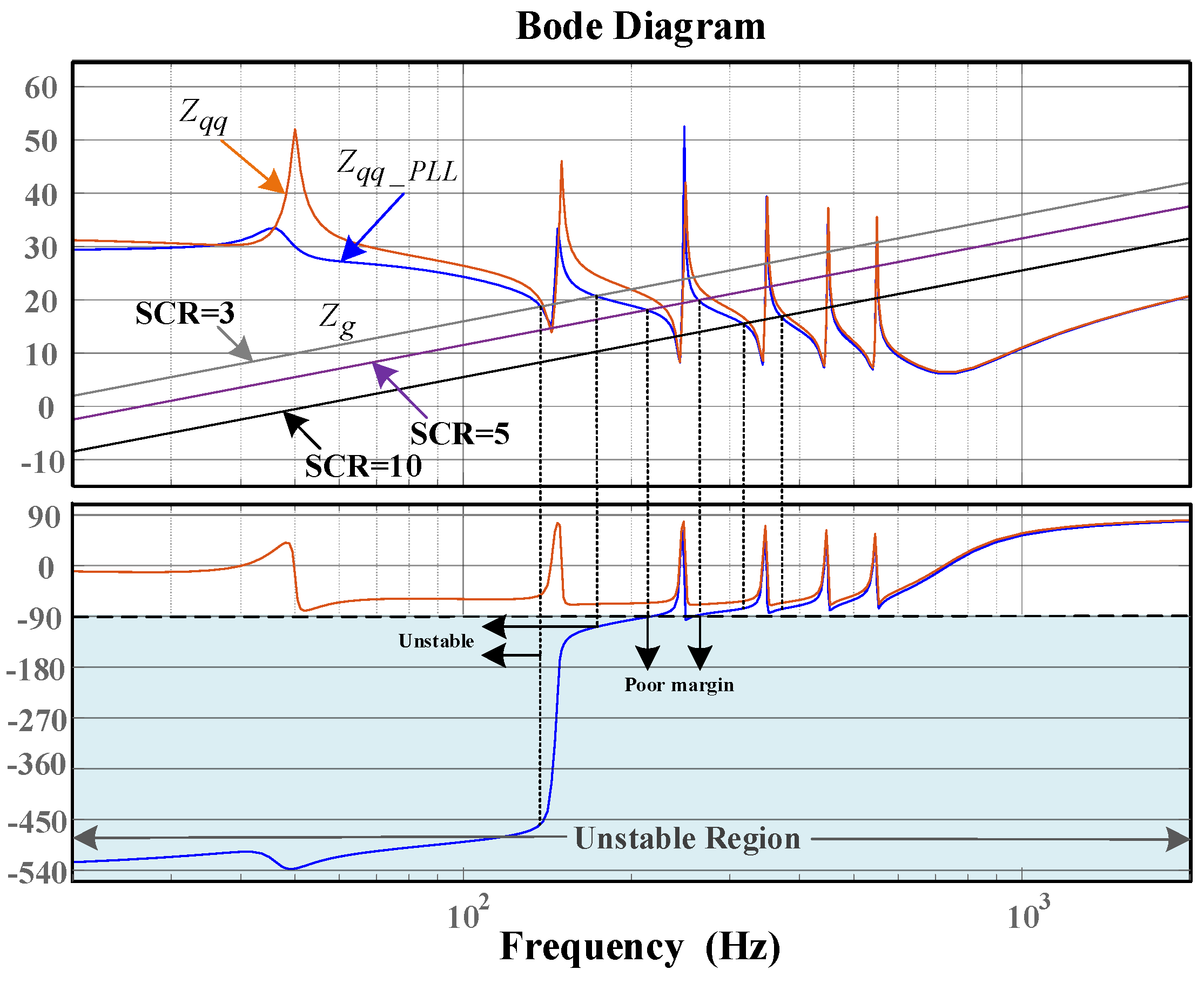
2.2. Stability Analysis of the Inverter Considering the Influence of MFOF-PLL
3. Inverter Impedance Reshaping Method Based on APF-PLL
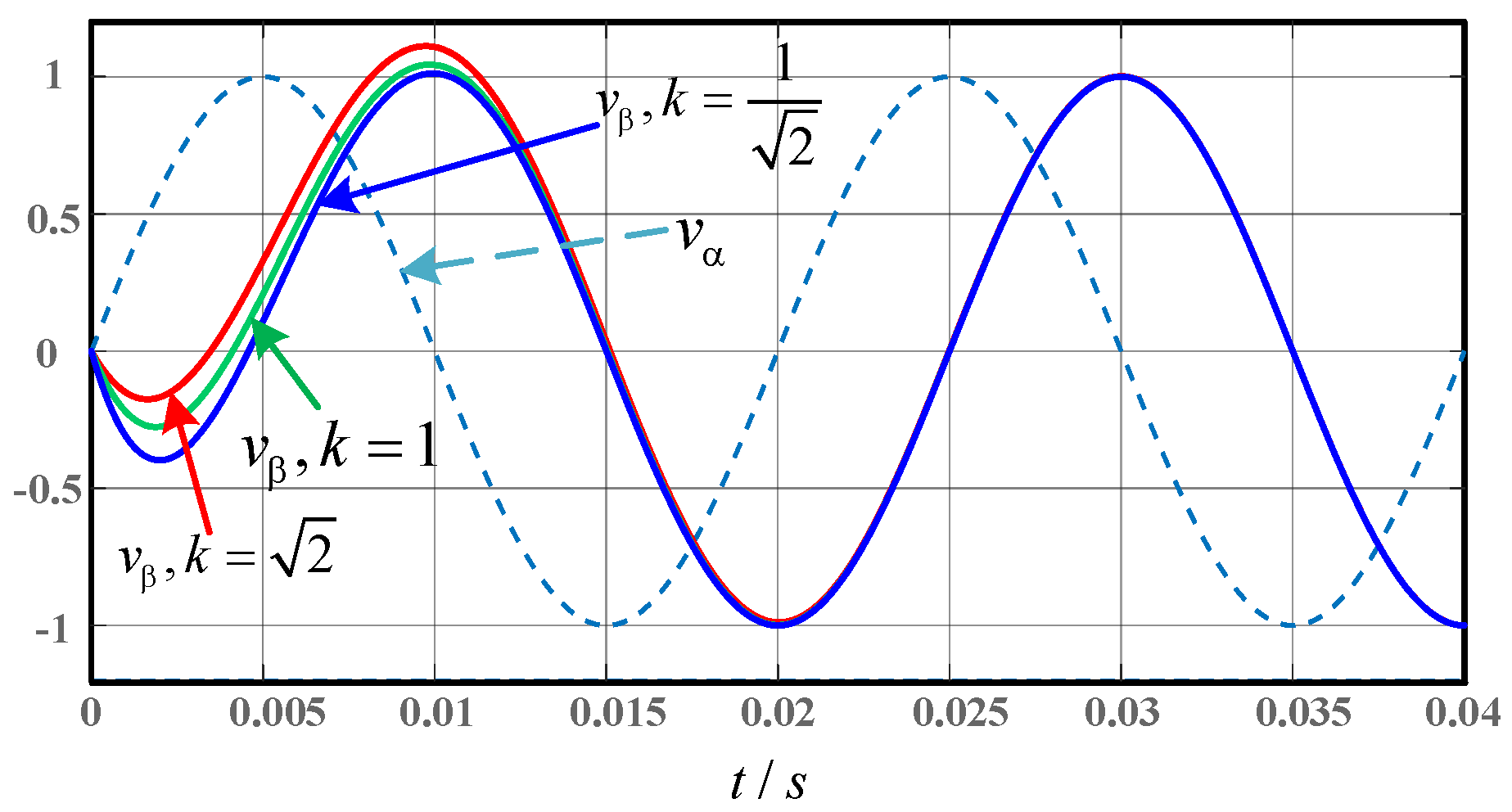
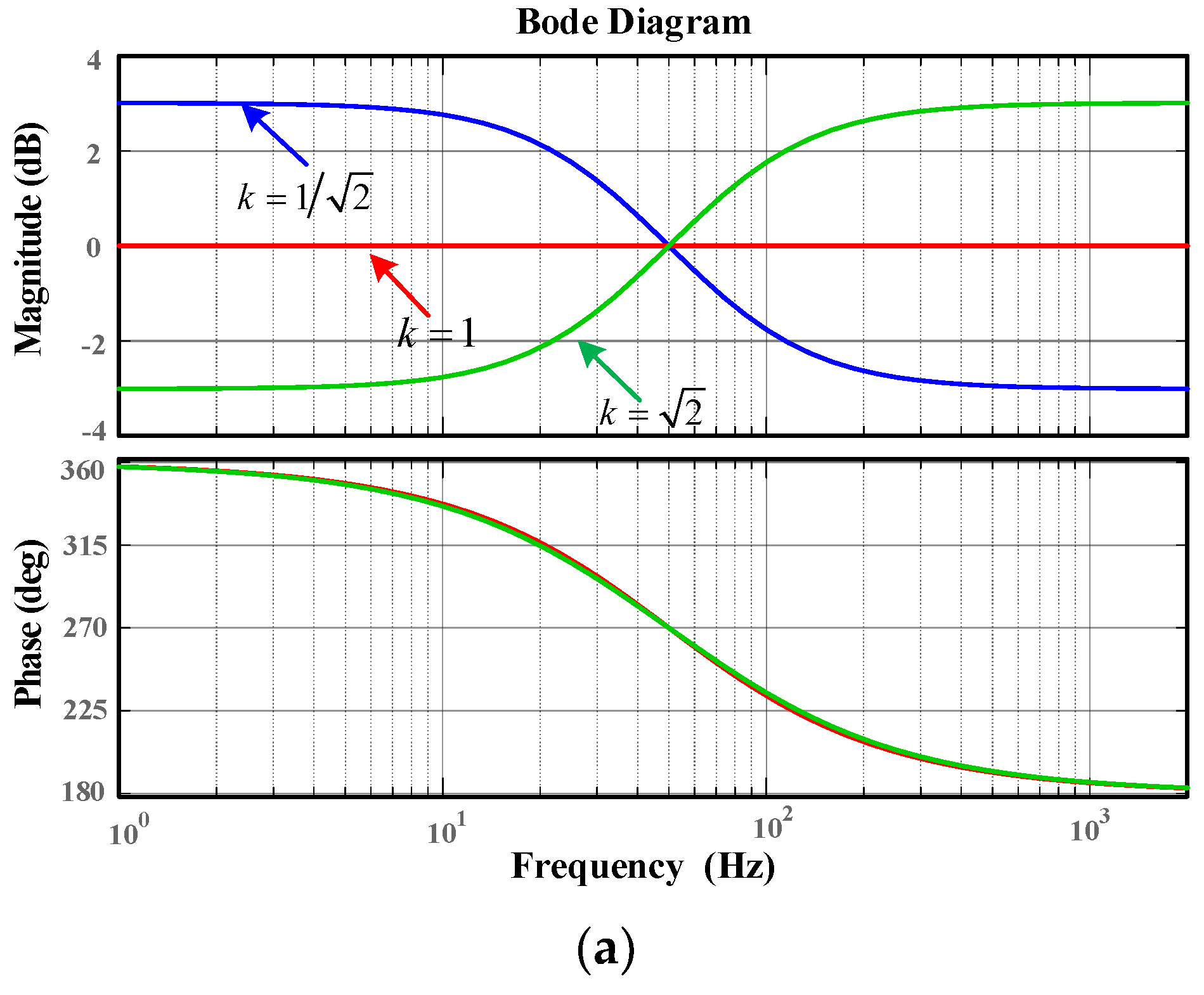
3.1. Improved MFOF-PLL
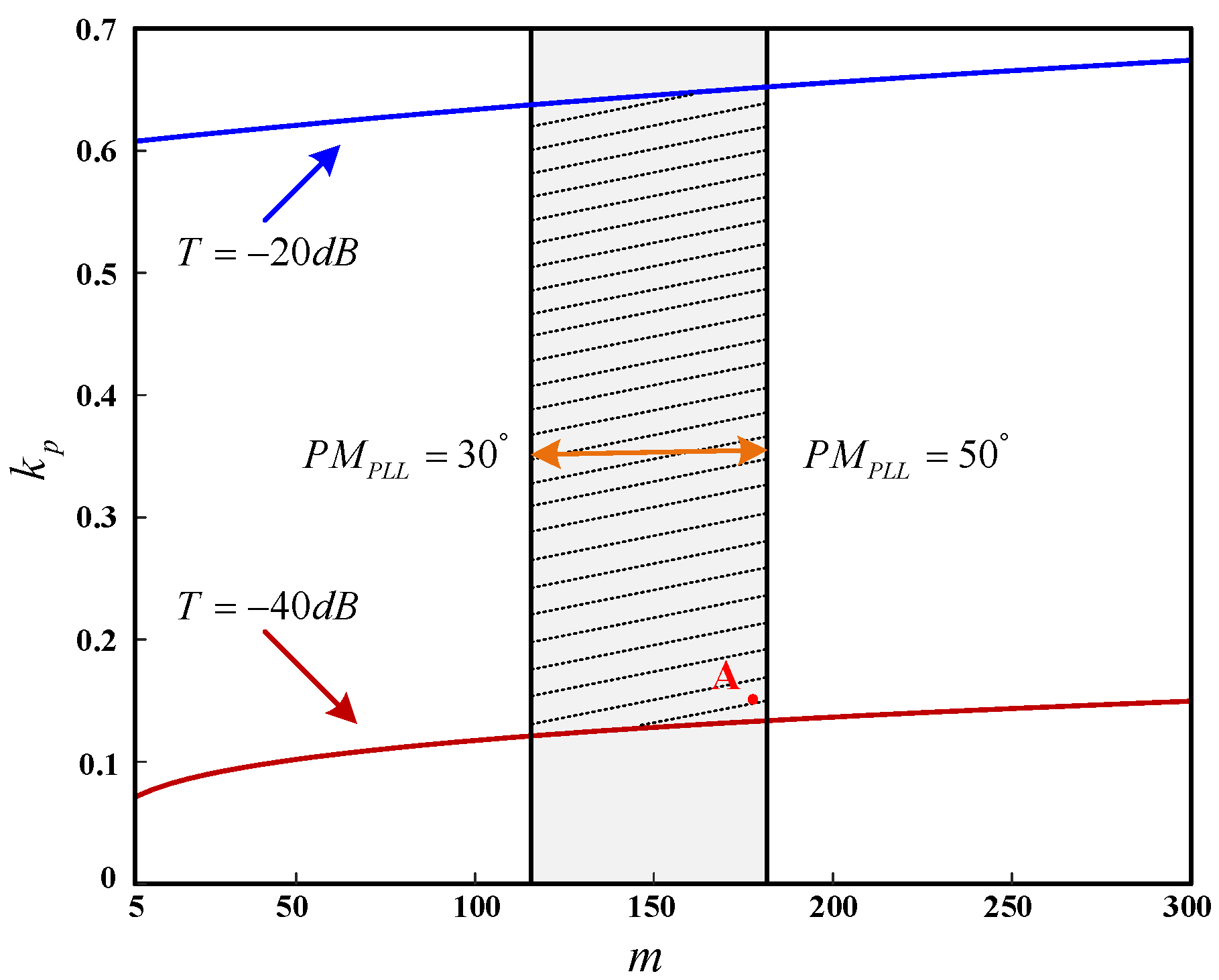
3.2. Parameter Optimization Design Method for CCF-MFOF-PLL
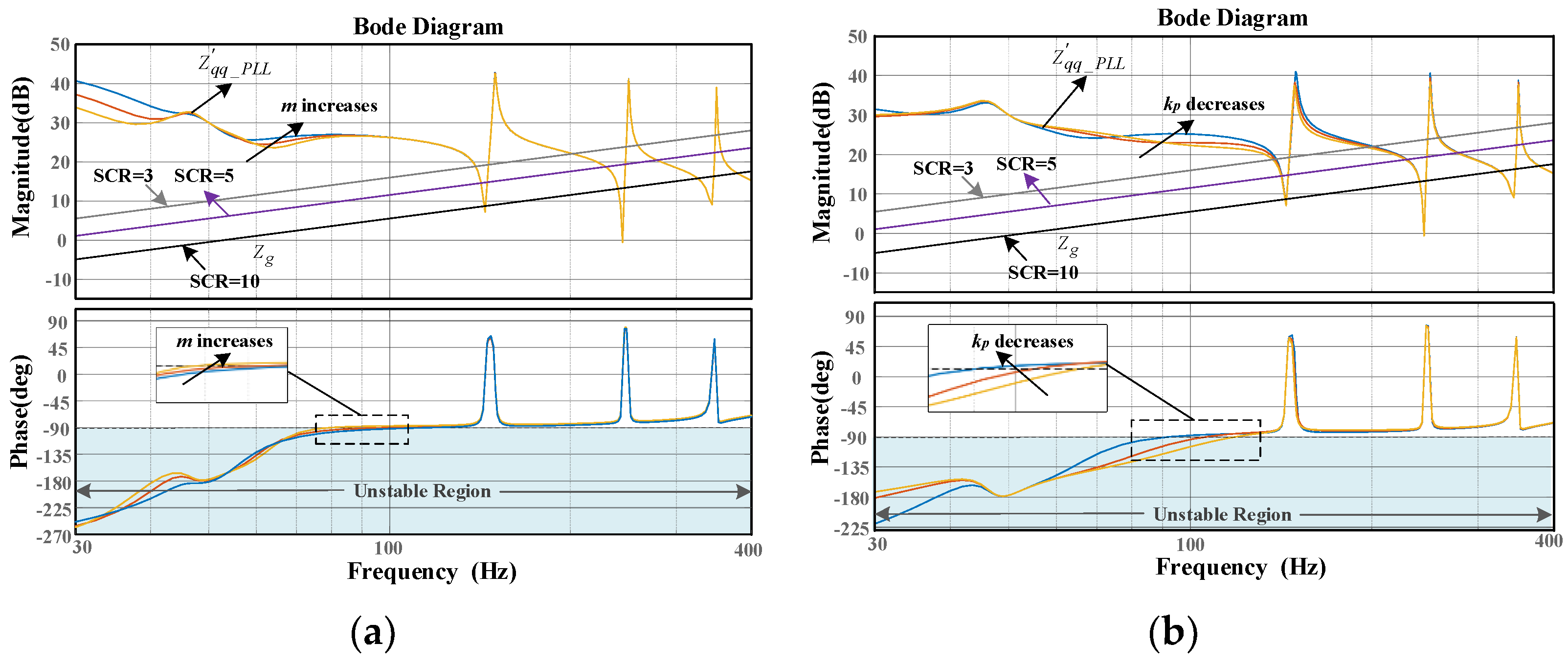
3.3. Stability Analysis of the Inverter after Impedance Reshaping
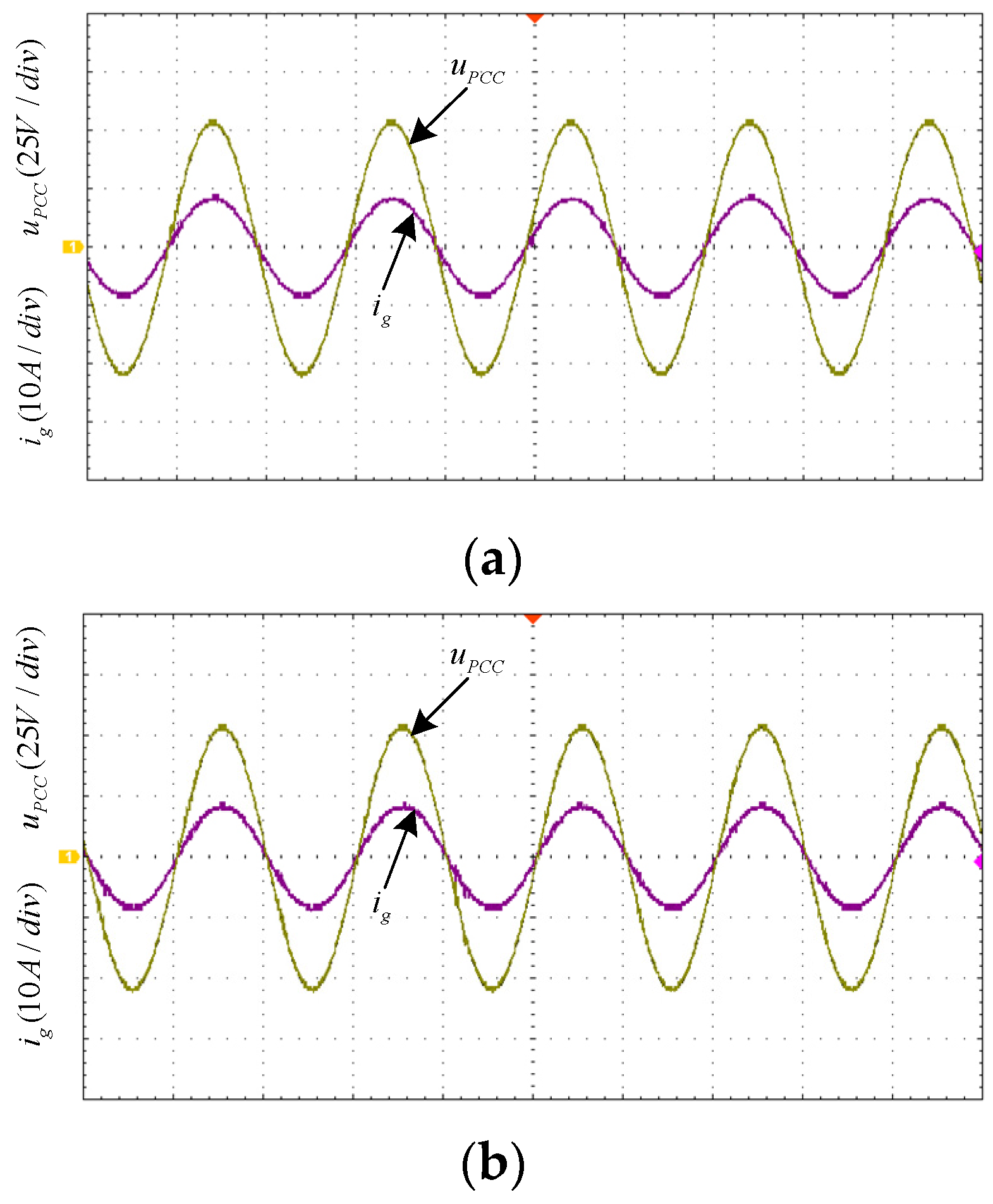
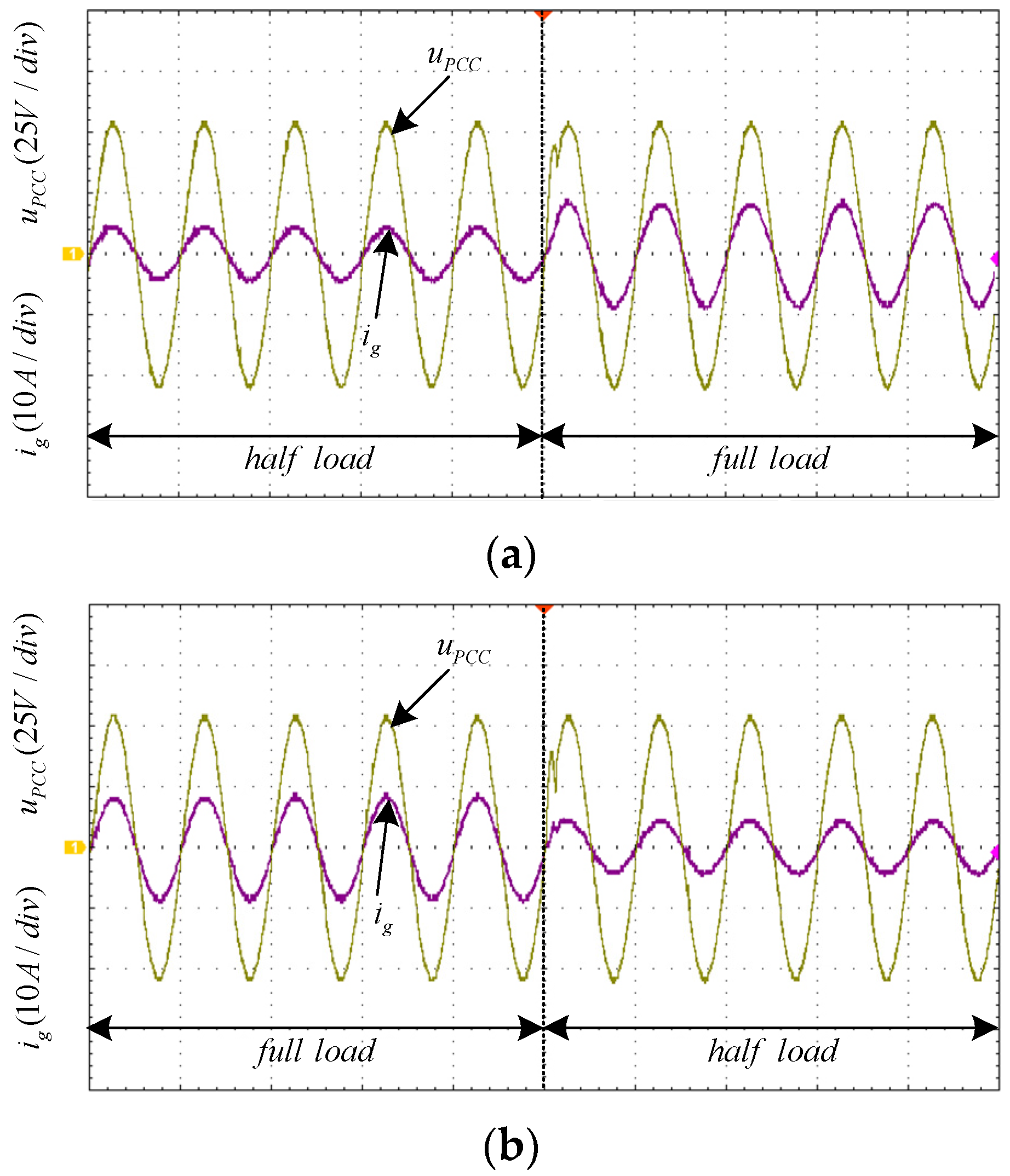
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PLL | Phase-locked loop |
| SRF-PLL | Synchronous reference frame phase-locked loop |
| APF-PLL | All-pass-filter phase-locked loop |
| CCF | Complex coefficient filter |
| MFOF | Modified first-order filter |
| MFOF-PLL | Modified first-order filter phase-locked loop |
| CCF-MFOF-PLL | Modified first-order filter phase-locked loop with complex coefficient filter |
| GCI | Grid-connected inverter |
| QSG | Quadrature signal generator |
| PM | Phase margin |
| PCC | Point of common coupling |
| THD | Total harmonic distortion |
| SCR | Short-circuit ratio |
| RTDS | Real time digital simulation system |
References
- Blaabjerg, F.; Liserre, M.; Ma, K. Power Electronics Converters for Wind Turbine Systems. IEEE Trans. Ind. 2012, 48, 708–719. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Blaabjerg, F.; Loh, P.C. Grid-Current-Feedback Active Damping for LCL Resonance in Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2016, 31, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Qian, H.; Hu, Y.; Bian, S.; Xie, S. Overview of SOGI-Based Single-Phase Phase-Locked Loops for Grid Synchronization Under Complex Grid Conditions. IEEE Access. 2021, 9, 39275–39291. [Google Scholar] [CrossRef]
- Huang, L.; Wu, C.; Zhou, D.; Blaabjerg, F. A Double-PLLs-Based Impedance Reshaping Method for Extending Stability Range of Grid-Following Inverter Under Weak Grid. IEEE Trans. Power Electron. 2022, 37, 4091–4104. [Google Scholar] [CrossRef]
- Feng, G.; Ye, Z.; Xia, Y.; Nian, H.; Huang, L.; Wang, Z. High Frequency Resonance Suppression Strategy of Three-Phase Four-Wire Split Capacitor Inverter Connected to Parallel Compensation Grid. Energies 2022, 15, 1486. [Google Scholar] [CrossRef]
- Hamood, M.A.; Marjanovic, O.; Carrasco, J. Adaptive Impedance-Conditioned Phase-Locked Loop for the VSC Converter Connected to Weak Grid. Energies 2021, 14, 6040. [Google Scholar] [CrossRef]
- Nian, H.; Liao, Y.; Li, M.; Sun, D.; Xu, Y.; Hu, B. Impedance Modeling and Stability Analysis of Three-Phase Four-Leg Grid-Connected Inverter Considering Zero-Sequence. IEEE Access. 2021, 9, 83676–83687. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, L.; Chen, X.; Zhang, Z.; Nian, H.; Zhao, J.; Deng, R.; Yan, L. Robust Active Damping Control for LCL-Type Shunt Active Power Filters. IEEE Access. 2022, 10, 39456–39470. [Google Scholar] [CrossRef]
- He, Y.; Wang, X.; Ruan, X.; Pan, D.; Qin, K. Hybrid Active Damping Combining Capacitor Current Feedback and Point of Common Coupling Voltage Feedforward for LCL-Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2021, 36, 2373–2383. [Google Scholar] [CrossRef]
- Azghandi, M.A.; Barakati, S.M.; Yazdani, A. Impedance-Based Stability Analysis and Design of a Fractional-Order Active Damper for Grid-Connected Current-Source Inverters. IEEE Trans. Sustain. Energy 2021, 12, 599–611. [Google Scholar] [CrossRef]
- Wang, X.; Qin, K.; Ruan, X.; Pan, D.; He, Y.; Liu, F. A Robust Grid-Voltage Feedforward Scheme to Improve Adaptability of Grid-Connected Inverter to Weak Grid Condition. IEEE Trans. Power Electron. 2021, 36, 2384–2395. [Google Scholar] [CrossRef]
- Khajeh, K.G.; Farajizadeh, F.; Solatialkaran, D.; Zare, F.; Yaghoobi, J.; Mithulananthan, N. A Full-Feedforward Technique to Mitigate the Grid Distortion Effect on Parallel Grid-Tied Inverters. IEEE Trans. Power Electron. 2022, 37, 8404–8419. [Google Scholar] [CrossRef]
- Lin, Z.; Ruan, X.; Wu, L.; Zhang, H.; Li, W. Multi resonant Component-Based Grid-Voltage-Weighted Feedforward Scheme for Grid-Connected Inverter to Suppress the Injected Grid Current Harmonics Under Weak Grid. IEEE Trans. Power Electron. 2020, 35, 9784–9793. [Google Scholar] [CrossRef]
- Li, M.; Xiao, H.; Cheng, M. An Adaptive Strategy Based on Repetitive Predictive Control for Improving Adaptability of LCL-Type Grid-Connected Inverters Under Weak Grid. IEEE Trans. Power Electron. 2022, 37, 2562–2572. [Google Scholar] [CrossRef]
- Babu, Y.N.; Padhy, N.P. Investigation of Damping Effect of PLL on Low-Frequency Harmonic Stability of Grid-Tied Inverter with αβ and dq Current Control Schemes. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1046–1060. [Google Scholar] [CrossRef]
- Lin, X.; Yu, J.; Yu, R.; Zhang, J.; Yan, Z.; Wen, H. Improving Small-Signal Stability of Grid-Connected Inverter Under Weak Grid by Decoupling Phase-Lock Loop and Grid Impedance. IEEE Trans. Ind. Electron. 2022, 69, 7040–7053. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Wu, W.; Gong, W.; Guerrero, J.M. Stability Enhancing Voltage Feed-Forward Inverter Control Method to Reduce the Effects of Phase-Locked Loop and Grid Impedance. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3000–3009. [Google Scholar] [CrossRef]
- Zhu, D.; Zhou, S.; Zou, X.; Kang, Y. Improved Design of PLL Controller for LCL-Type Grid-Connected Converter in Weak Grid. IEEE Trans. Power Electron. 2020, 35, 4715–4727. [Google Scholar] [CrossRef]
- Li, M.; Zhang, X.; Guo, Z.; Wang, J.; Wang, Y.; Li, F.; Zhao, W. The Control Strategy for the Grid-Connected Inverter Through Impedance Reshaping in q-Axis and its Stability Analysis Under a Weak Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3229–3242. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Wu, W.; Gong, W.; Zhou, L.; Zhou, X.; Guerrero, J.M. Admittance Modeling and Stability Analysis of Grid-Connected Inverter with LADRC-PLL. IEEE Trans. Ind. Electron. 2021, 68, 12272–12284. [Google Scholar] [CrossRef]
- Zhang, X.; Li, M.; Xu, D. PCC Voltage Perturbation Path Analysis and Compensation for Grid-Connected Voltage-Source Converter Under Weak Grid. IEEE Trans. Ind. Electron. 2021, 68, 12331–12339. [Google Scholar] [CrossRef]
- Berg, M.; Aapro, A.; Luhtala, R.; Messo, T. Small-Signal Analysis of Photovoltaic Inverter with Impedance-Compensated Phase-Locked Loop in Weak Grid. IEEE Trans. Energy Convers. 2020, 35, 347–355. [Google Scholar] [CrossRef]
- Lin, X.; Wen, Y.; Yu, R.; Yu, J.; Wen, H. Improved Weak Grids Synchronization Unit for Passivity Enhancement of Grid-Connected Inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 1. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. All-Pass-Filter-Based PLL Systems: Linear Modeling, Analysis, and Comparative Evaluation. IEEE Trans. Power Electron. 2020, 35, 3558–3572. [Google Scholar] [CrossRef]
- Stojic, D.; Georgijevic, N.; Rivera, M.; Milic, S. Novel Orthogonal Signal Generator for Single Phase PLL Applications. IET Power Electron. 2018, 11, 427–433. [Google Scholar] [CrossRef]
- Xia, T.; Zhang, X.; Tan, G.; Liu, Y. All-Pass-Filter-Based PLL for Single-Phase Grid-Connected Converters Under Distorted Grid Conditions. IEEE Access 2020, 8, 106226–106233. [Google Scholar] [CrossRef]
- Qian, Q.; Xie, S.; Huang, L.; Xu, J.; Zhang, Z.; Zhang, B. Harmonic Suppression and Stability Enhancement for Parallel Multiple Grid-Connected Inverters Based on Passive Inverter Output Impedance. IEEE Trans. Ind. Electron. 2017, 64, 7587–7598. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q Small-Signal Impedance of Grid-Tied Inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar] [CrossRef]
- Wen, B.; Dong, D.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Impedance-Based Analysis of Grid-Synchronization Stability for Three-Phase Paralleled Converters. IEEE Trans. Power Electron. 2016, 31, 26–38. [Google Scholar] [CrossRef]
- Wang, X.; Harnefors, L.; Blaabjerg, F. Unified Impedance Model of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2018, 33, 1775–1787. [Google Scholar] [CrossRef]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C. Three-Phase PLLs: A Review of Recent Advances. IEEE Trans. Power Electron. 2017, 32, 1894–1907. [Google Scholar] [CrossRef] [Green Version]
- Hui, N.; Wang, D.; Li, Y. A Novel Hybrid Filter-Based PLL to Eliminate Effect of Input Harmonics and DC Offset. IEEE Access. 2018, 6, 19762–19773. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Po | Rated power | 5 kW |
| f1 | Fundamental frequency | 50 Hz |
| C | Filter capacitors | 10 μF |
| kp | Proportion coefficient of CCF-MFOF-PLL | 0.15 |
| ki | Integral coefficient of CCF-MFOF-PLL | 3.94 |
| kcp | Proportion coefficient of current regulator | 10 |
| kcr | Resonance coefficient of current regulator | 600 |
| fsw | Switching frequency | 15 kHz |
| fs | Sampling frequency | 15 kHz |
| Hi1 | Active damping factor | 10 |
| L1 | Inverter-side inductance | 1 mH |
| L2 | Grid-side inductance | 1 mH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Cao, T.; Chen, H.; Dong, X.; Zhang, S. Robust Control and Optimization Method for Single-Phase Grid-Connected Inverters Based on All-Pass-Filter Phase-Locked Loop in Weak Grid. Energies 2022, 15, 7355. https://doi.org/10.3390/en15197355
Yang L, Cao T, Chen H, Dong X, Zhang S. Robust Control and Optimization Method for Single-Phase Grid-Connected Inverters Based on All-Pass-Filter Phase-Locked Loop in Weak Grid. Energies. 2022; 15(19):7355. https://doi.org/10.3390/en15197355
Chicago/Turabian StyleYang, Longyue, Tian Cao, Huapeng Chen, Xinwei Dong, and Shuyuan Zhang. 2022. "Robust Control and Optimization Method for Single-Phase Grid-Connected Inverters Based on All-Pass-Filter Phase-Locked Loop in Weak Grid" Energies 15, no. 19: 7355. https://doi.org/10.3390/en15197355