
Available Technologies and Commercial Devices to Harvest Energy by Human Trampling in Smart Flooring Systems: A Review

 ,
,  ,
,
Abstract
:1. Introduction
2. Smart Tiles for Energy Harvesting Applications: Current Technologies and Future Challenges
2.1. Transduction Mechanisms, Conditioning Sections, Operational Strategies Applied to Smart Floor Applications
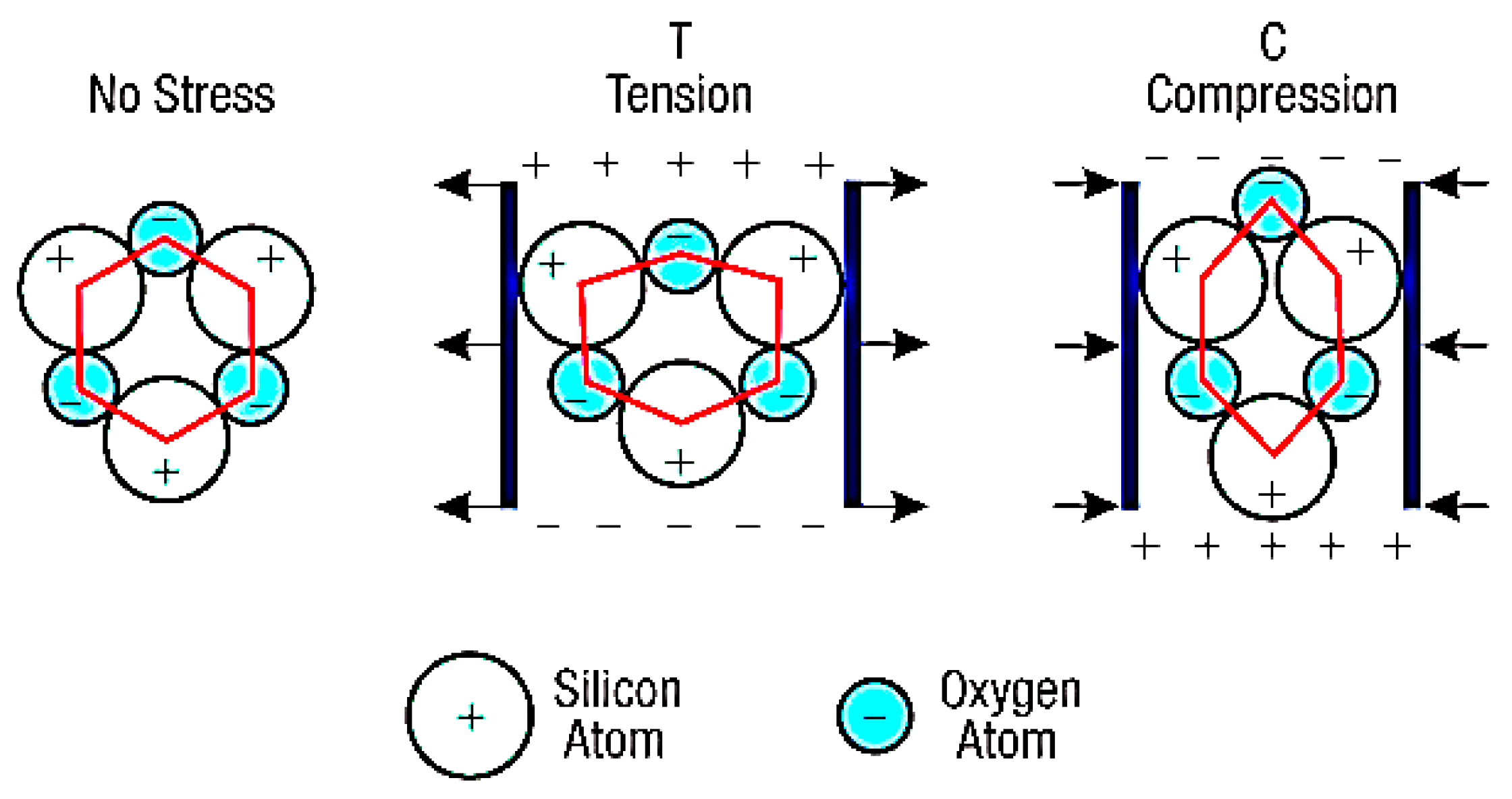
2.1.1. Piezoelectric-Based Smart Floor Solutions: Working Principle and Theoretical Fundamentals
- Single-Layer Piezoelectric Generators: they consist of a piezoelectric foil and a passive substrate;
- Multi-Layer Piezoelectric Generators: they are constituted by a series of piezoelectric ceramic foils stacked on each other and enclosed between two electrodes (Figure 3). There is only one electrode between two adjacent foils to optimise the dimensions and number of components, realizing a stack of thin piezoelectric layers (i.e., <1 mm thickness) interposed between electrodes. The electric fields (and consequently the potential difference) generated by the single piezoelectric layer, perpendicular to the foils, change towards each layer. A multi-layer piezo generator provides a lower output voltage than that provided by a single-layer piezo harvester. Conversely, a multi-layer generator provides an output current significantly higher than a single-layer piezoelectric generator [26].
2.1.2. Electromagnetic-Based Smart Floor and Power Management Solutions: Working Principle and Theoretical Fundamentals
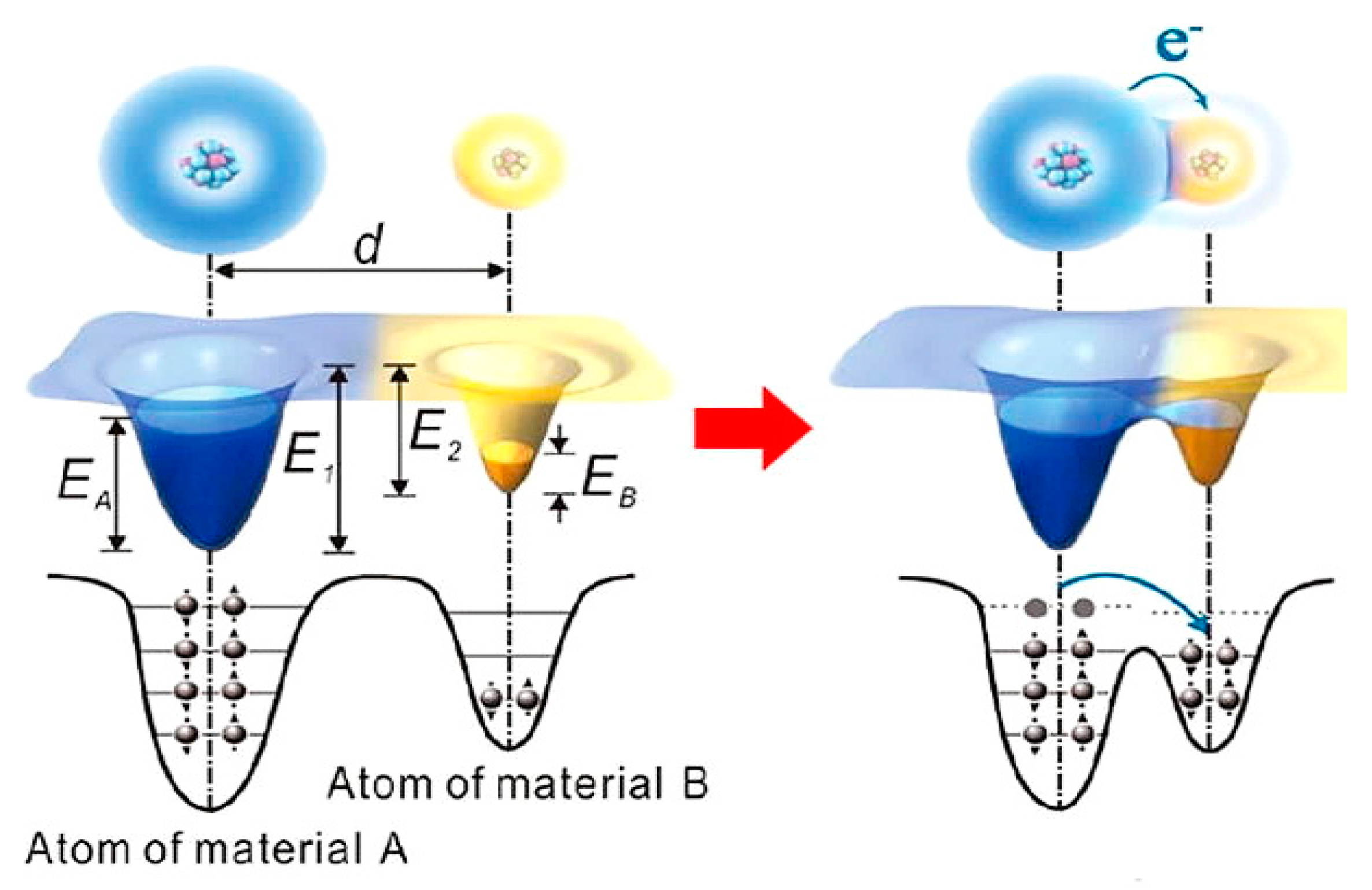
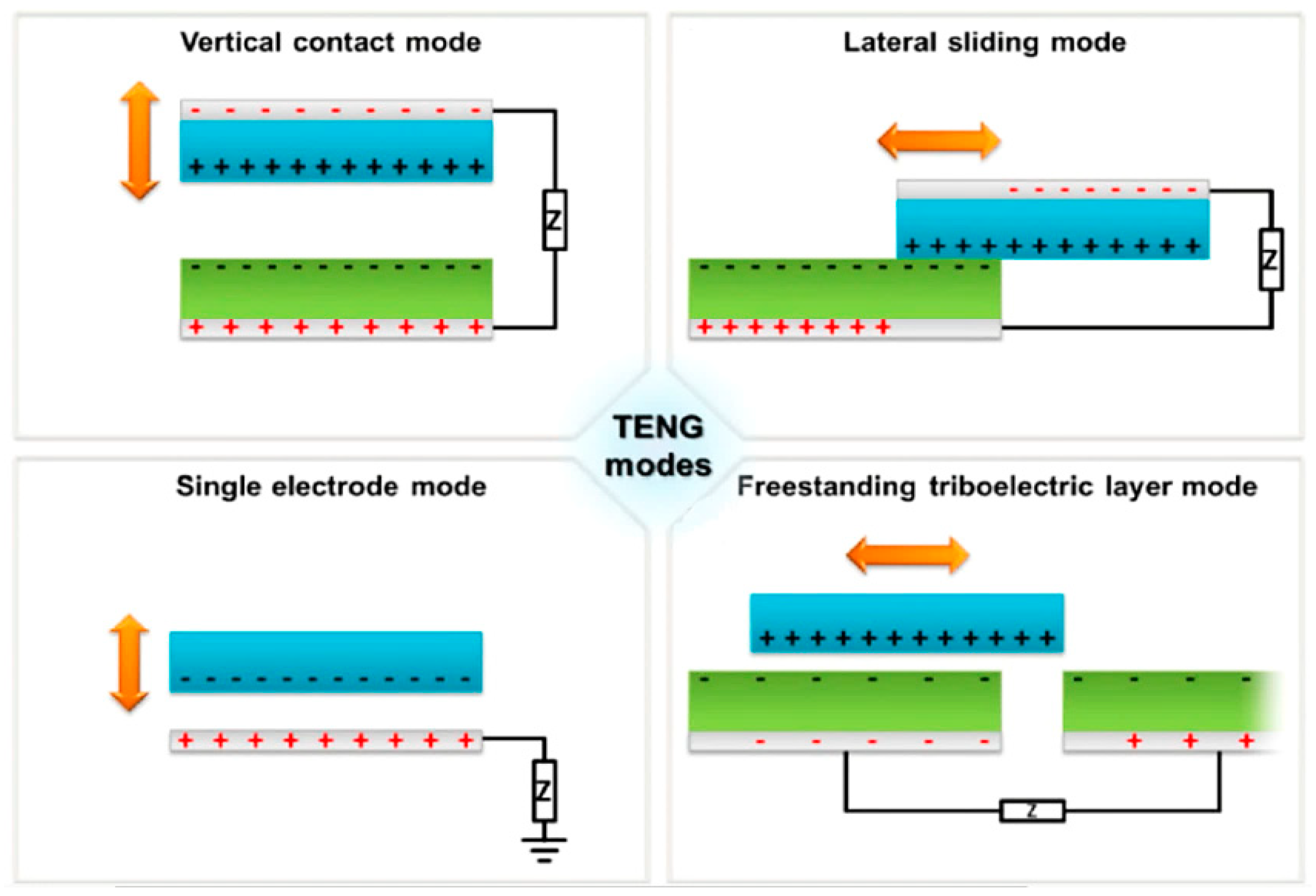
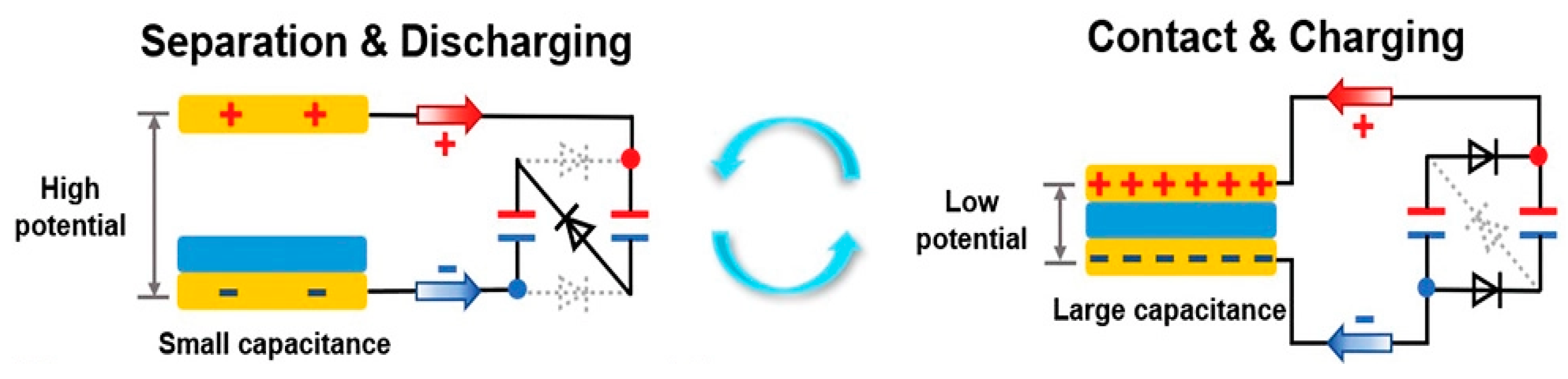
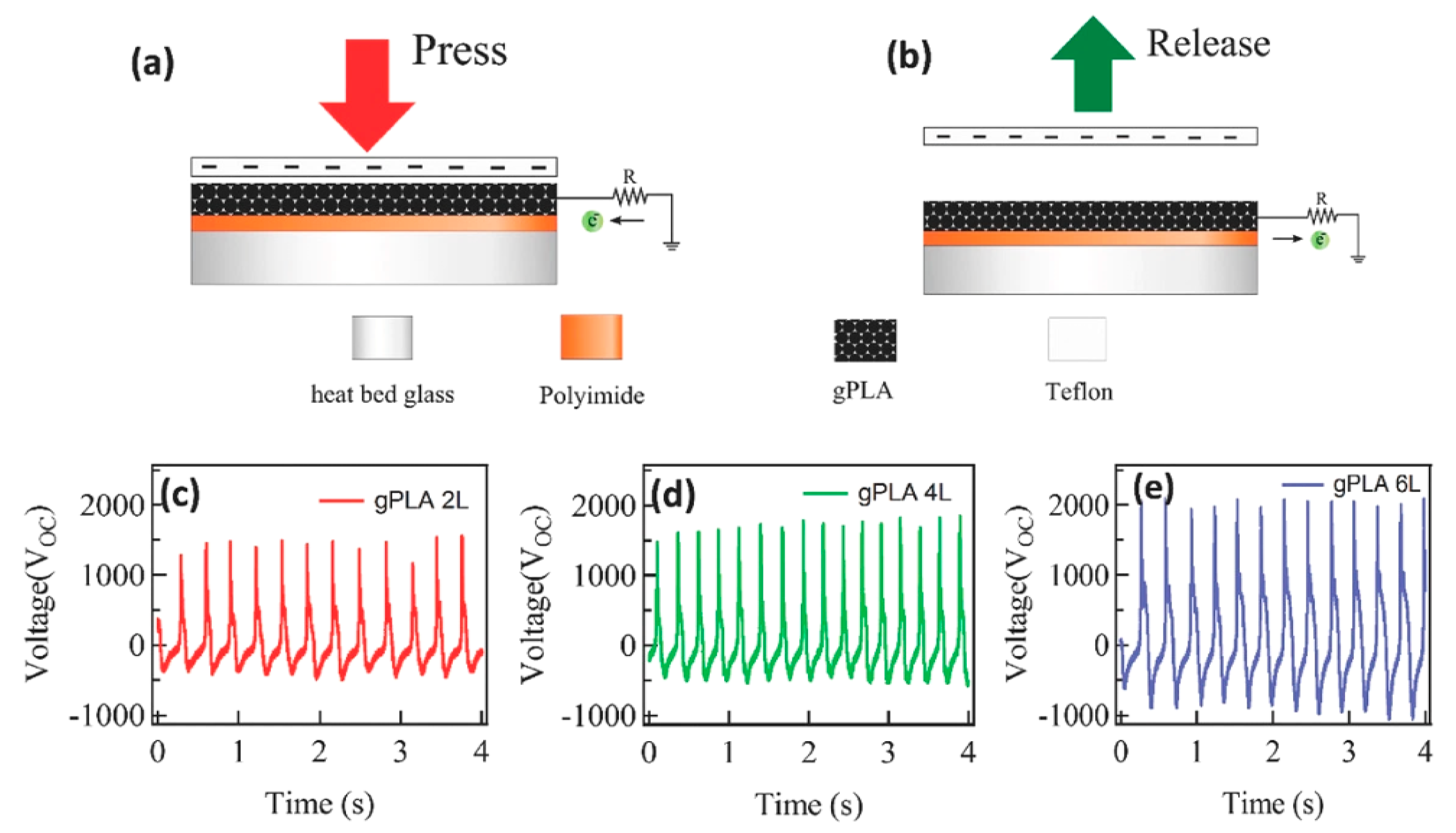
2.1.3. Triboelectric-Based Floor Solutions: Working Principle and Theoretical Fundamentals
2.2. State of the Art about Energy Harvesting Technologies Applicable to Smart Floors
2.2.1. Piezoelectric Smart Tiles for Energy Harvesting Applications
2.2.2. Electromagnetic Harvesters for Large-Scale Power Production and Road Pavement Energy Harvesters (RPEHs)
2.2.3. TENG and Hybrid Energy Harvesters Evolution in Small-Scale Power Production
3. Commercial Smart-Floors and Components for Energy-Harvesting Applications
3.1. Transduction Mechanisms, Conditioning Sections, Operational Strategies Applied to Smart Floor Applications
3.1.1. Pavegen’s Tiles
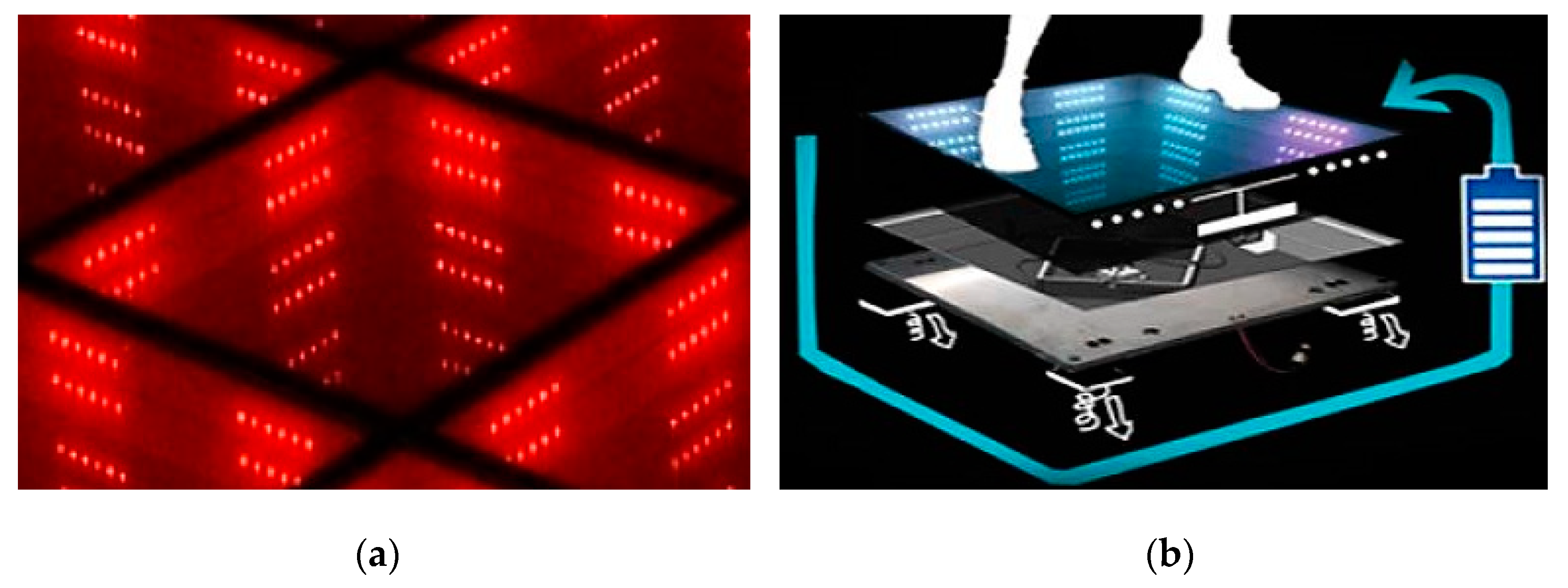
3.1.2. Sustainable Dance Floor by Studio Roosegard
3.1.3. Smart Energy Floor by Energy Floors
3.1.4. Hybrid Energy Tile by OTEM2000
3.1.5. Smart Energy Floor by Veranu
3.1.6. Waydip Company’s Tiles
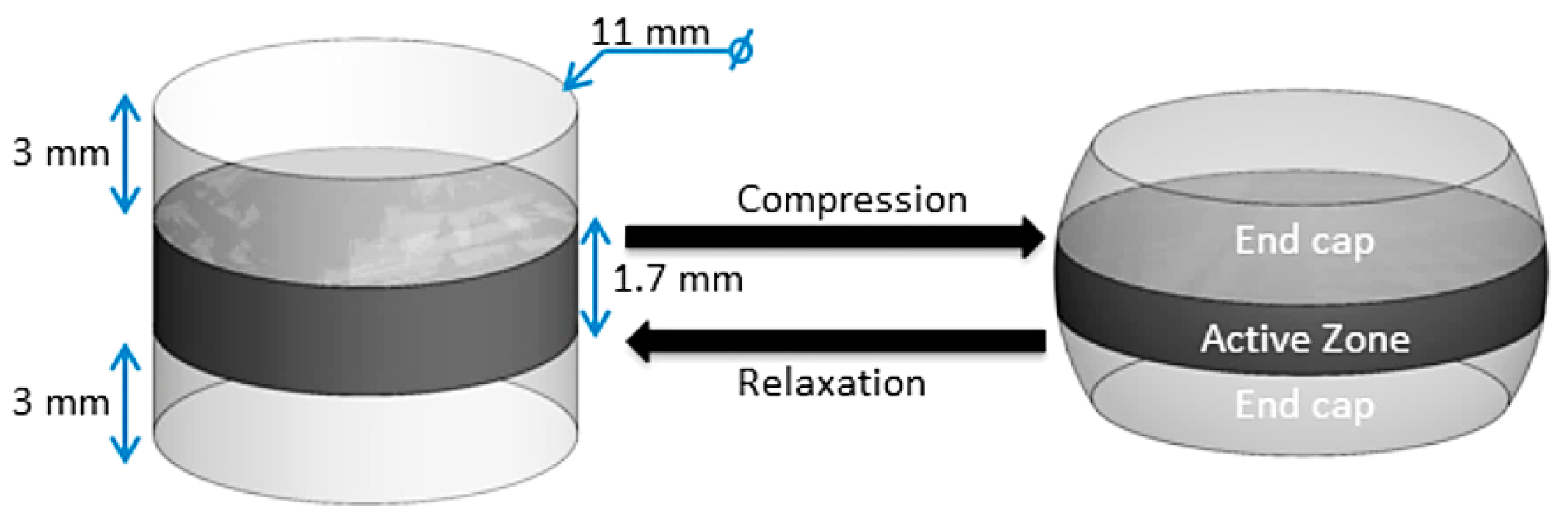
3.1.7. EAP: Electro-Active-Polymers
3.1.8. POWERleap Tiles
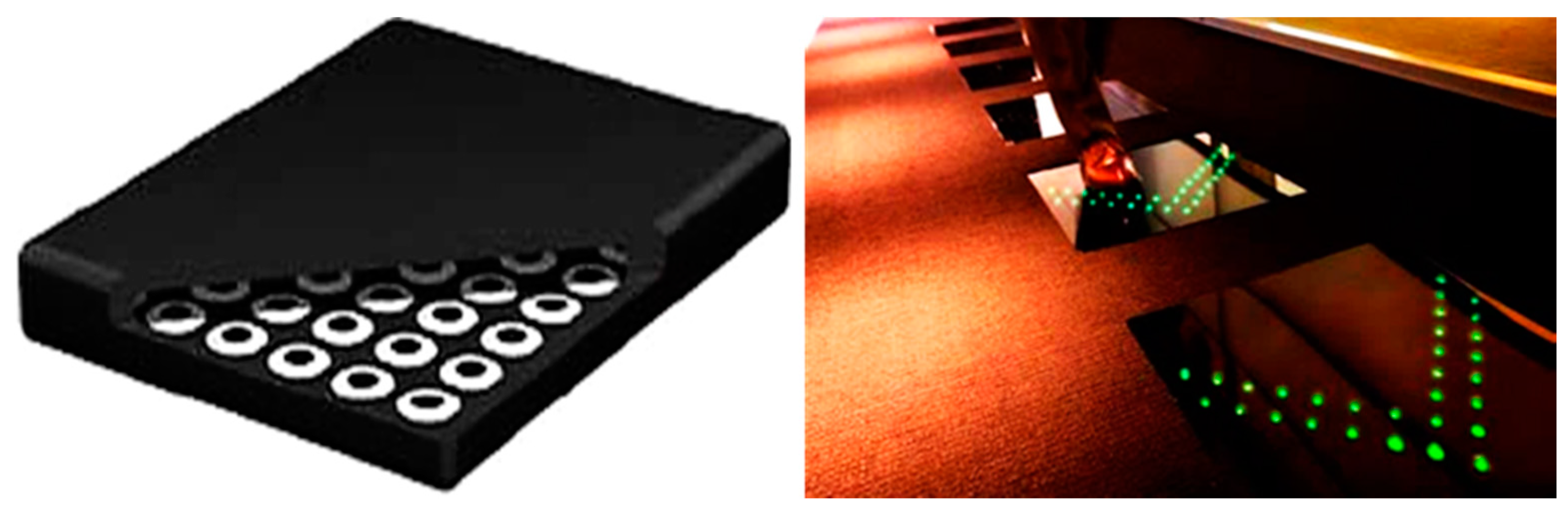
3.1.9. Power Generating Floor by Sound-Power
4. Comparative Analysis and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bizon, N.; Tabatabaei, N.M.; Blaabjerg, F.; Kurt, E. Energy Harvesting and Energy Efficiency: Technology, Methods, and Applications; Springer International Publishing: New York, NY, USA, 2017; ISBN 978-3-319-49874-4. [Google Scholar] [CrossRef]
- Visconti, P.; Primiceri, P.; Ferri, R.; Pucciarelli, M.; Venere, E. An overview on state-of-art energy harvesting techniques and related choice criteria: A WSN node for goods transport and storage powered by a smart solar- based EH system. Int. J. Renew. Energy Res. 2017, 7, 1281–1295. [Google Scholar]
- Pozo, B.; Garate, J.I.; Araujo, J.Á.; Ferreiro, S. Energy Harvesting Technologies and Equivalent Electronic Structural Models—Review. Electronics 2019, 8, 486. [Google Scholar] [CrossRef] [Green Version]
- Akinaga, H. Recent advances and future prospects in energy harvesting technologies. Jpn. J. Appl. Phys. 2020, 59, 110201. [Google Scholar] [CrossRef]
- de Fazio, R.; Cafagna, D.; Marcuccio, G.; Visconti, P. Limitations and Characterization of Energy Storage Devices for Harvesting Applications. Energies 2020, 13, 783. [Google Scholar] [CrossRef] [Green Version]
- Covaci, C.; Gontean, A. Piezoelectric Energy Harvesting Solutions: A Review. Sensors 2020, 20, 3512. [Google Scholar] [CrossRef] [PubMed]
- de Fazio, R.; Cafagna, D.; Marcuccio, G.; Minerba, A.; Visconti, P. A Multi-Source Harvesting System Applied to Sensor-Based Smart Garments for Monitoring Workers’ Bio-Physical Parameters in Harsh Environments. Energies 2020, 13, 2161. [Google Scholar] [CrossRef]
- Xu, L.; Hasan, A.M.; Wu, H.; Yang, Y. Electromagnetic–Triboelectric Hybridized Nanogenerators. Energies 2021, 14, 6219. [Google Scholar] [CrossRef]
- De Fazio, R.; Stabile, M.; De Vittorio, M.; Velázquez, R.; Visconti, P. An Overview of Wearable Piezoresistive and Inertial Sensors for Respiration Rate Monitoring. Electronics 2021, 10, 2178. [Google Scholar] [CrossRef]
- Akin-Ponnle, A.E.; Carvalho, N.B. Energy Harvesting Mechanisms in a Smart City-A Review. Smart Cities 2021, 4, 476–498. [Google Scholar] [CrossRef]
- Nia, E.M.; Zawawi, N.A.W.A.; Singh, B.S.M. A Review of Walking Energy Harvesting Using Piezoelectric Materials. IOP Conf. Ser. Mater. Sci. Eng. 2017, 291, 012026. [Google Scholar] [CrossRef]
- Ahmad, S.; Abdul Mujeebu, M.; Farooqi, M.A. Energy Harvesting from Pavements and Roadways: A Comprehensive Review of Technologies, Materials, and Challenges. Int. J. Energy Res. 2019, 43, 1974–2015. [Google Scholar] [CrossRef]
- Vizzari, D.; Gennesseaux, E.; Lavaud, S.; Bouron, S.; Chailleux, E. Pavement Energy Harvesting Technologies: A Critical Review. RILEM Tech. Lett. 2021, 6, 93–104. [Google Scholar] [CrossRef]
- Ahmad, A.F.; Razali, A.R.; Romlay, F.R.M.; Razelan, I.S.M. Energy Harvesting on Pavement A Review. Int. J. Renew. Energy Res. (IJRER) 2021, 11, 1250–1266. [Google Scholar]
- Centre for Energy Economics Research and Policy Statistical Review of World Energy, 70th ed. Available online: https://www.bp.com/content/dam/bp/business-sites/en/global/corporate/pdfs/energy-economics/statistical-review/bp-stats-review-2021-full-report.pdf (accessed on 6 September 2021).
- Puscasu, O.; Counsell, N.; Herfatmanesh, M.R.; Peace, R.; Patsavellas, J.; Day, R. Powering Lights with Piezoelectric Energy-Harvesting Floors. Energy Technol. 2018, 6, 906–916. [Google Scholar] [CrossRef] [Green Version]
- Vigo Majello, M.C. Piezoelectric Flooring and Public Space. Available online: http://www.sustainablemediterraneanconstruction.eu/SMC/The_Magazine_n.11_files/1112.pdf (accessed on 29 November 2021).
- Shanmugam, S.; Selvaraj, V.; Kasirajan, R.; Sivakumar, H.; Kandasamy, K. Household Energy Conservation Using Piezoelectric Tiles and Solar Tracker. IOP Conf. Ser. Mater. Sci. Eng. 2020, 955, 012071. [Google Scholar] [CrossRef]
- Gupta, M.N.; Suman, S.Y. Electricity Generation Due to Vibration of Moving Vehicles Using Piezoelectric Effect. Adv. Electron. Electr. Eng. 2014, 4, 313–318. [Google Scholar]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-Performance Piezoelectric Energy Harvesters and Their Applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef] [Green Version]
- Rathod, V.T. A Review of Electric Impedance Matching Techniques for Piezoelectric Sensors, Actuators and Transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Zhu, M.; Yi, Z.; Yang, B.; Lee, C. Making Use of Nanoenergy from Human—Nanogenerator and Self-Powered Sensor Enabled Sustainable Wireless IoT Sensory Systems. Nano Today 2021, 36, 101016. [Google Scholar] [CrossRef]
- Correia, D.; Ferreira, A. Energy Harvesting on Airport Pavements: State-of-the-Art. Sustainability 2021, 13, 5893. [Google Scholar] [CrossRef]
- de Fazio, R.; Perrone, E.; Velázquez, R.; De Vittorio, M.; Visconti, P. Development of a Self-Powered Piezo-Resistive Smart Insole Equipped with Low-Power BLE Connectivity for Remote Gait Monitoring. Sensors 2021, 21, 4539. [Google Scholar] [CrossRef] [PubMed]
- Ghazanfarian, J.; Mohammadi, M.M. Piezoelectric Energy Harvesting: A Systematic Review of Reviews. arXiv 2021, arXiv:2101.09312. [Google Scholar] [CrossRef]
- What Are Piezoelectric Generators—APC International. Available online: https://www.americanpiezo.com/piezo-theory/generators.html (accessed on 3 September 2021).
- Zhu, D.; Almusallam, A.; Beeby, S.; Tudor, J.; Harris, N. A Bimorph Multi-Layer Piezoelectric Vibration Energy Harvester; IEEE: Leuven, Belgium, 2010. [Google Scholar]
- Vucheva, Y.; Kolev, G.; Aleksandrova, M.; Denishev, K. Comparison of the Piezoelectric Properties of Single-Layer and Bilayer Structures with Thin Films of PZT and ZnO in Dynamic Mode. In Proceedings of the International Conference on Information, Communication and Energy Systems and Technologies, Sofia, Bulgaria, 24–26 June 2015; Volume 2015, pp. 283–286. [Google Scholar]
- Ambrosio, R.; Jimenez, A.; Mireles, J.; Moreno, M.; Monfil, K.; Heredia, H. Study of Piezoelectric Energy Harvesting System Based on PZT. Integr. Ferroelectr. 2011, 126, 77–86. [Google Scholar] [CrossRef]
- Tianze, L.; Xia, Z.; Chuan, J.; Luan, H. Analysis of the Characteristics of Piezoelectric Sensor and Research of Its Application. In Proceedings of the 2009 18th IEEE International Symposium on the Applications of Ferroelectrics, Xi’an, China, 23–27 August 2009; pp. 1–4. [Google Scholar]
- Piezoelectric Generators. Available online: https://piezo.com/pages/piezoelectric-generators (accessed on 6 September 2021).
- Al Ahmad, M.; Allataifeh, A. Electrical Extraction of Piezoelectric Constants. Heliyon 2018, 4, e00910. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arnau, A.; Soares, D. Fundamentals of Piezoelectricity. In Piezoelectric Transducers and Applications; Vives, A.A., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–38. ISBN 978-3-540-77508-9. [Google Scholar]
- Rupitsch, S.J. Piezoelectric Sensors and Actuators: Fundamentals and Applications; Topics in Mining, Metallurgy and Materials Engineering; Springer: Berlin/Heidelberg, Germany, 2019; ISBN 978-3-662-57532-1. [Google Scholar]
- Panthongsy, P.; Isarakorn, D.; Janphuang, P.; Hamamoto, K. Fabrication and Evaluation of Energy Harvesting Floor Using Piezoelectric Frequency Up-Converting Mechanism. Sens. Actuators A Phys. 2018, 279, 321–330. [Google Scholar] [CrossRef]
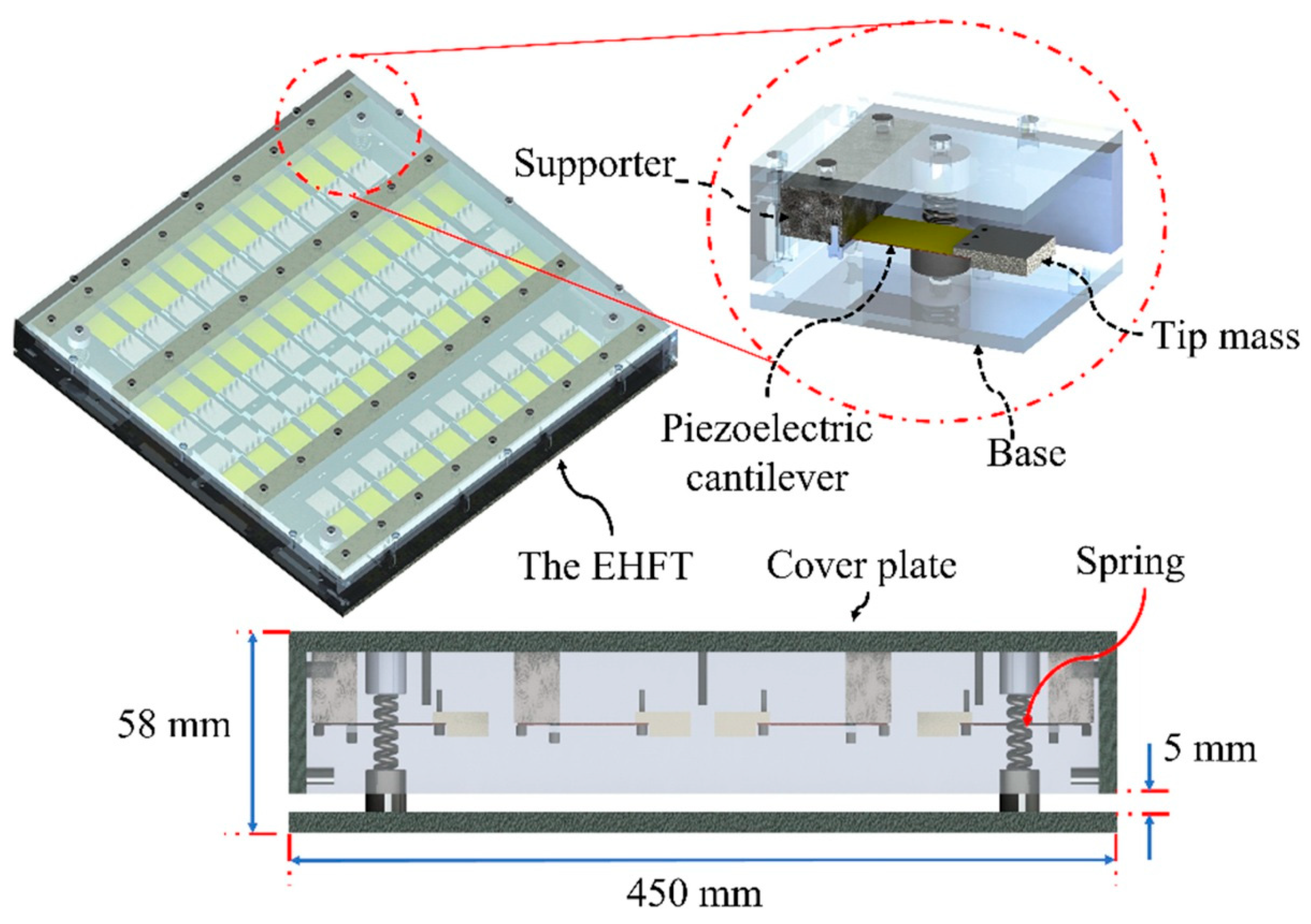
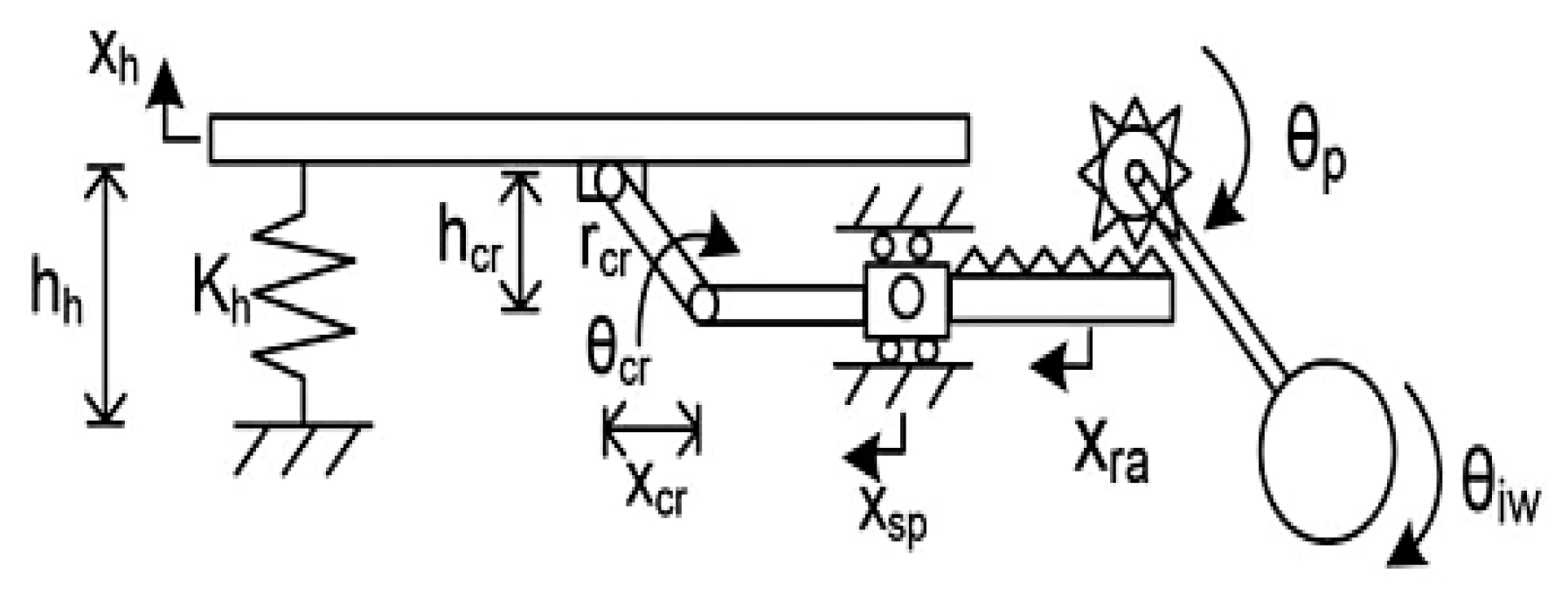
- Jintanawan, T.; Phanomchoeng, G.; Suwankawin, S.; Kreepoke, P.; Chetchatree, P.; U-viengchai, C. Design of Kinetic-Energy Harvesting Floors. Energies 2020, 13, 5419. [Google Scholar] [CrossRef]
- Yildiz, F. Low Power Energy Harvesting and Storage Techniques from Ambient Human Powered Energy Sources; University of Northern Iowa: Cedar Falls, IA, USA, 2008. [Google Scholar]
- Good, R.H.; Nelson, T.J. Classical Theory of Electric and Magnetic Fields; Academic Press: New York, NY, USA, 2013; ISBN 978-1-4832-7203-0. [Google Scholar]
- Turnbull, F.G.; Pauk, O. 14—Power Electronics—Rectifiers, Filters, and Power Supplies. In Reference Data for Engineers, 9th ed.; Middleton, W.M., Van Valkenburg, M.E., Eds.; Newnes: Woburn, MA, USA, 2002; ISBN 978-0-7506-7291-7. [Google Scholar]
- Yilmaz, M.; Tunkar, B.A.; Park, S.; Elrayes, K.; Mahmoud, M.A.E.; Abdel-Rahman, E.; Yavuz, M. High-Efficiency Passive Full Wave Rectification for Electromagnetic Harvesters. J. Appl. Phys. 2014, 116, 134902. [Google Scholar] [CrossRef]
- Zhang, W.; Lin, H.; Zhang, Y.; Jin, J. Modeling and Controlling Strategy of Four-Switch Buck-Boost Convertor with Smooth Mode Transitions. Open Electr. Electron. Eng. J. 2017, 11, 56–67. [Google Scholar] [CrossRef] [Green Version]
- Four-Switch Buck-Boost Converter in Buck or Boost Mode Delivers the Highest Efficiency—EDN. Available online: https://www.edn.com/four-switch-buck-boost-converter-in-buck-or-boost-mode-delivers-the-highest-efficiency/ (accessed on 7 September 2021).
- Bowick, C. RF Circuit Design, 2nd ed.; Newnes: Amsterdam, The Netherlands; Boston, MA, USA, 2007; ISBN 978-0-7506-8518-4. [Google Scholar]
- Silicon Labs Impedance Matching Network Architectures. Available online: https://www.silabs.com/documents/public/application-notes/an1275-imp-match-for-network-arch.pdf (accessed on 13 September 2021).
- Wang, Z.L.; Wang, A.C. On the Origin of Contact-Electrification. Mater. Today 2019, 30, 34–51. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, J.; Park, S.; Park, C.; Park, C.; Choi, H.-J. Effect of the Relative Permittivity of Oxides on the Performance of Triboelectric Nanogenerators. RSC Adv. 2017, 7, 49368–49373. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Zhou, L.; Li, S.; Liu, D.; Li, Y.; Gao, Y.; Liu, Y.; Dai, Y.; Wang, J.; Wang, Z.L. Selection Rules of Triboelectric Materials for Direct-Current Triboelectric Nanogenerator. Nat. Commun. 2021, 12, 4686. [Google Scholar] [CrossRef]
- Pan, S.; Zhang, Z. Fundamental Theories and Basic Principles of Triboelectric Effect: A Review. Friction 2019, 7, 2–17. [Google Scholar] [CrossRef]
- Sun, W.; Wang, N.; Li, J.; Xu, S.; Song, L.; Liu, Y.; Wang, D. Humidity-Resistant Triboelectric Nanogenerator and Its Applications in Wind Energy Harvesting and Self-Powered Cathodic Protection. Electrochim. Acta 2021, 391, 138994. [Google Scholar] [CrossRef]
- Sriphan, S.; Charoonsuk, T.; Maluangnont, T.; Vittayakorn, N. High-Performance Hybridized Composited-Based Piezoelectric and Triboelectric Nanogenerators Based on BaTiO3/PDMS Composite Film Modified with Ti0.8O2 Nanosheets and Silver Nanopowders Cofillers. ACS Appl. Energy Mater. 2019, 2, 3840–3850. [Google Scholar] [CrossRef]
- Niua, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhao, Z.; Liu, L.; Zhou, L.; Liu, D.; Li, S.; Chen, S.; Dai, Y.; Wang, Z.L. Improved Output Performance of Triboelectric Nanogenerator by Fast Accumulation Process of Surface Charges. Adv. Energy Mater. 2021, 11, 2100050. [Google Scholar] [CrossRef]
- Hwang, S.J.; Jung, H.J.; Kim, J.H.; Ahn, J.H.; Song, D.; Song, Y.; Lee, H.L.; Moon, S.P.; Park, H.; Sung, T.H. Designing and Manufacturing a Piezoelectric Tile for Harvesting Energy from Footsteps. Curr. Appl. Phys. 2015, 15, 669–674. [Google Scholar] [CrossRef]
- He, M.; Wang, S.; Zhong, X.; Guan, M. Study of a Piezoelectric Energy Harvesting Floor Structure with Force Amplification Mechanism. Energies 2019, 12, 3516. [Google Scholar] [CrossRef] [Green Version]
- Yingyong, P.; Thainiramit, P.; Jayasvasti, S.; Thanach-Issarasak, N.; Isarakorn, D. Evaluation of Harvesting Energy from Pedestrians Using Piezoelectric Floor Tile Energy Harvester. Sens. Actuators A Phys. 2021, 331, 113035. [Google Scholar] [CrossRef]
- Duarte, F.; Ferreira, A.; Fael, P. Road Pavement Energy–Harvesting Device to Convert Vehicles’ Mechanical Energy into Electrical Energy. J. Energy Eng. 2018, 144, 04018003. [Google Scholar] [CrossRef]
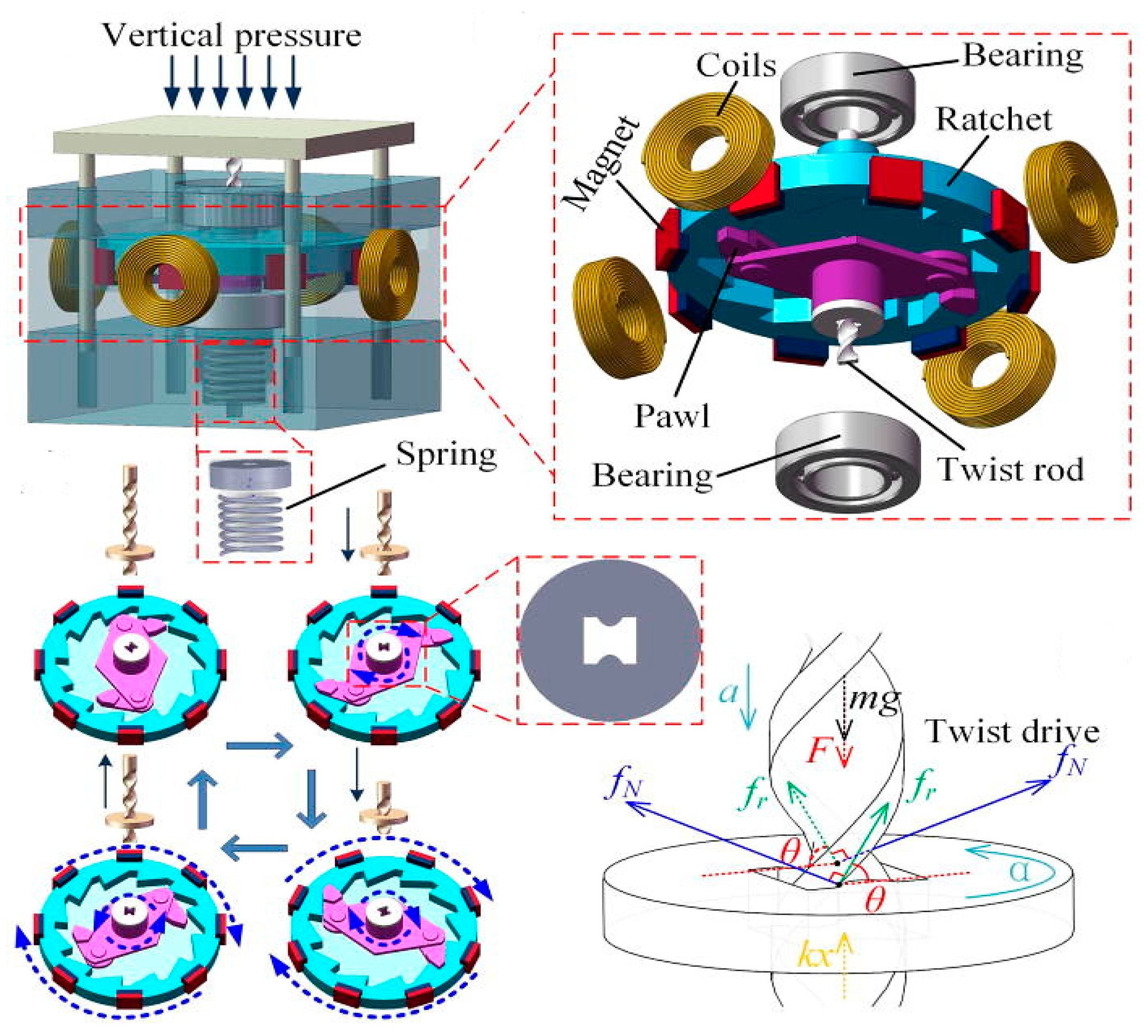
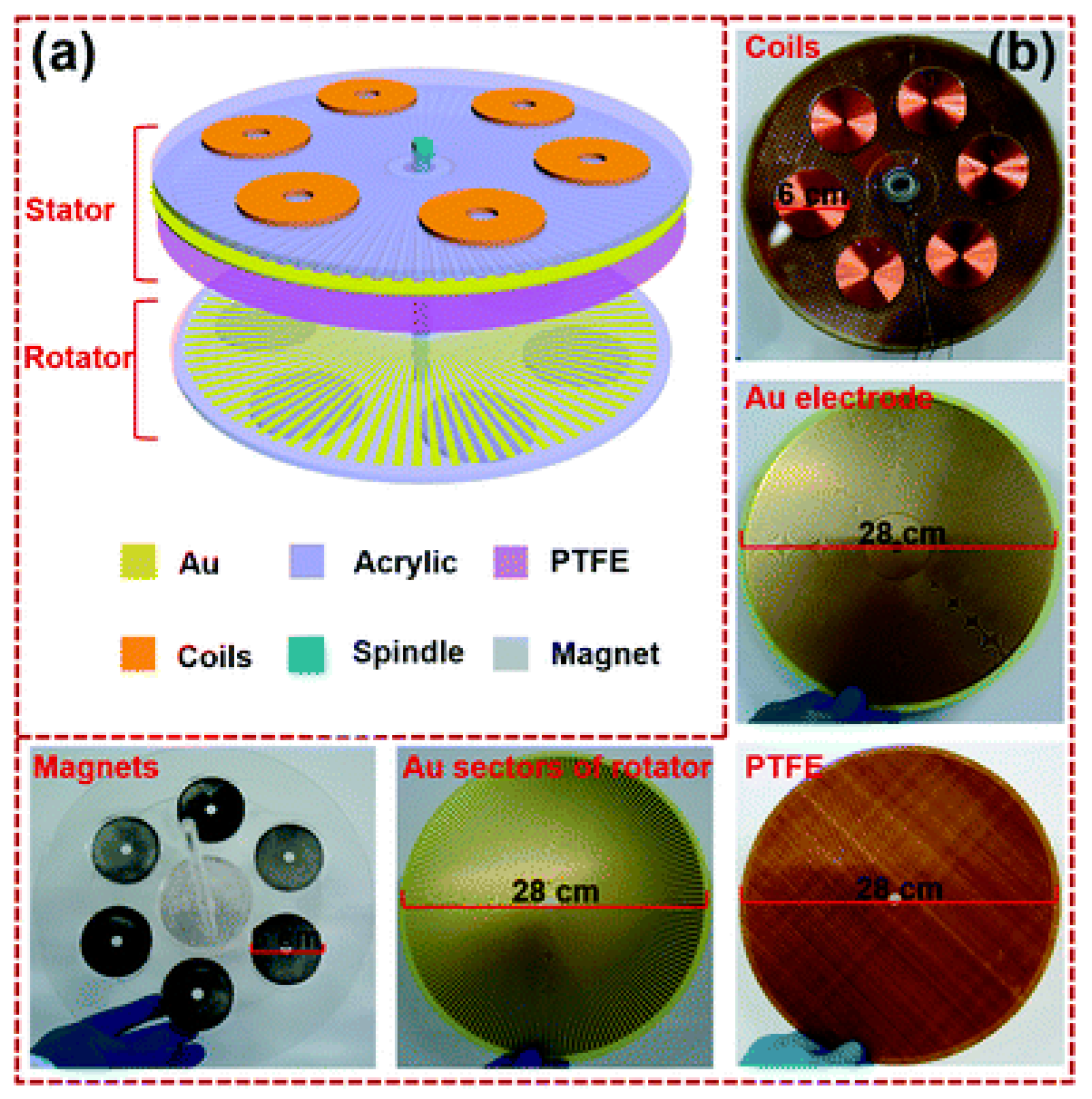
- Zhang, Y.; Luo, A.; Wang, Y.; Dai, X.; Lu, Y.; Wang, F. Rotational Electromagnetic Energy Harvester for Human Motion Application at Low Frequency. Appl. Phys. Lett. 2020, 116, 053902. [Google Scholar]
- He, C.; Zhu, W.; Chen, B.; Xu, L.; Jiang, T.; Han, C.; Gu, G.Q.; Li, D.; Wang, Z.L. Smart Floor with Integrated Triboelectric Nanogenerator As Energy Harvester and Motion Sensor. ACS Appl. Mater. Interfaces 2017, 9, 26126–26133. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L.; Lin, L.; Chen, J.; Niu, S.; Zi, Y. Triboelectric Nanogenerators; Green Energy and Technology; Springer International Publishing: Cham, Switzerland, 2016; ISBN 978-3-319-40038-9. [Google Scholar]
- Barkas, D.A.; Psomopoulos, C.; Papageorgas, P.; Kalkanis, K.; Piromalis, D.; Mouratidis, A. Sustainable Energy Harvesting through Triboelectric Nano–Generators: A Review of Current Status and Applications. Energy Procedia 2019, 157, 999–1010. [Google Scholar] [CrossRef]
- Islam, E.; Abdullah, A.M.; Chowdhury, A.; Tasnim, F.; Martinez, M.; Olivares, C.; Lozano, K.; Uddin, M. Electromagnetic- Triboelectric-Hybrid Energy Tile for Biomechanical Green Energy Harvesting. Nano Energy 2020, 77, 105250. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, Q.; Zhang, W.; Du, X.; Zhang, Y.; Gong, S.; Ren, K.; Sun, Q.; Wang, Z.L. Hybrid Piezo/Triboelectric Nanogenerator for Highly Efficient and Stable Rotation Energy Harvesting. Nano Energy 2019, 57, 440–449. [Google Scholar] [CrossRef]
- Chen, Y.; Cheng, Y.; Jie, Y.; Cao, X.; Wang, N.; Wang, Z.L. Energy Harvesting and Wireless Power Transmission by a Hybridized Electromagnetic–Triboelectric Nanogenerator. Energy Environ. Sci. 2019, 12, 2678–2684. [Google Scholar] [CrossRef]
- Mallineni, S.S.K.; Dong, Y.; Behlow, H.; Rao, A.M.; Podila, R. A Wireless Triboelectric Nanogenerator. Adv. Energy Mater. 2018, 8, 1702736. [Google Scholar] [CrossRef] [Green Version]
- Energy Harvesting System Market by Technology, Component, Application- COVID-19 Impact Analysis. Available online: https://www.marketsandmarkets.com/Market-Reports/energy-harvesting-market-734.html (accessed on 25 August 2021).
- About Pavegen|How it All Started. Consultato 5 Settembre 2021. Available online: https://pavegen.com/ar/about/ (accessed on 1 June 2021).
- Energy-Harvesting Street Tiles Generate Power from Pavement Pounder—Scientific American. Available online: https://www.scientificamerican.com/article/pavement-pounders-at-paris-marathon-generate-power/ (accessed on 5 September 2021).
- PAVEGEN V3. Available online: https://www.wevolver.com/wevolver.staff/pavegen.v3 (accessed on 5 September 2021).
- Seow, Z.L.; Chen, S.; Khairudin, N. An Investigation into Energy Generating Tiles: Pavegen; APSC 261; UBC Social Ecological Economic Development Studies (SEEDS) Student Report; University of British Columbia: Vancouver, BC, Canada, 2012; pp. 1–20. [Google Scholar]
- Pavegen’s Power-Generating Floor Is Coming to Oxford Street|WIRED UK. Available online: https://www.wired.co.uk/article/pavegen-tile-power-generation-london (accessed on 5 September 2021).
- Energy Harvesting: Pavegen and the Rise of Kinetic Tile Tech. Available online: https://theswitch.co.uk/energy/guides/technology/energy-harvesting-tiles (accessed on 5 September 2021).
- Tech: Pavegen—The Technology behind the Tile|EG News. Available online: https://www.egi.co.uk/news/pavegens-the-technology-behind-the-tile/ (accessed on 10 September 2021).
- Webster, Craig, e Philip Tucker. Flooring System. U.S. Patent US20190048858A1, 14 February 2019. Available online: https://patents.google.com/patent/US20190048858A1/en?q=flooring+system&assignee=pavegen&oq=flooring+system+pavegen (accessed on 1 June 2021).
- Webster, Craig. Electrical Generator. World Intellectual Property Org. WO2017194937A1, 16 November 2017. Available online: https://patents.google.com/patent/WO2017194937A1/en?q=electrical+generator&assignee=pavegen&oq=electrical+generator+pavegen (accessed on 14 June 2021).
- Sustainable Dance Floor|Studio Roosegaarde. Available online: https://www.studioroosegaarde.net/project/sustainable-dance-floor (accessed on 14 September 2021).
- Cornelis, B.J.; Alijd, J.; Van Doorn, S.; Van Dongen, A.; Randag, A.; Jan Jansen, J.; Jacobus Hubertus Paulides, J.; Willem Jansen, E.A.; Lomonova, D.F.; Roosegaarde Bisschop. Vloer. NL1034439C1, 31 March 2009. Available online: https://patents.google.com/patent/NL1034439C1/nl (accessed on 2 September 2021).
- Sustainable Energy Floor Specifications. Available online: https://issuu.com/sustainabledanceclub/docs/sustainable_energy_floor_specifications (accessed on 9 September 2021).
- Home|Energy Floors. Available online: https://energy-floors.com/ (accessed on 5 September 2021).
- OTEM2000. Productos UFIPV. Available online: https://otem2000.wixsite.com/otem2000eng/hybrid-energyfloor-eng (accessed on 10 September 2021).
- OTEM2000. Productos IIPV. Available online: https://otem2000.wixsite.com/otem2000eng/solarfloor-eng (accessed on 10 September 2021).
- Pilarski, N.; OTEM2000. Solucions Innovadores per a Laprofitament Energètic de la Mobilitat. 2018. Available online: https://www.youtube.com/watch?v=QRmBkFdC6ro (accessed on 15 June 2021).
- Hernández, A. ORTI. Baldosa Pisable Generadora de Electricidad. World Intellectual Property Org. WO2014167147A1, 16 October 2014. Available online: https://patents.google.com/patent/WO2014167147A1/es?q=baldosa+pisable&oq=baldosa+pisable (accessed on 15 June 2021).
- Calcagni, A. Floor Tile. World Intellectual Property Org. WO2018065854A1, 12 April 2018. Available online: https://patents.google.com/patent/WO2018065854A1/fr?inventor=alessio+calcagni&oq=alessio+calcagni (accessed on 11 June 2021).
- Equinvest. Rassegna stampa Veranu. 2017. Available online: http://www.veranu.eu/files/RS2017_veranu_010203.pdf (accessed on 10 June 2021).
- Company Profile Veranu, s.d. Available online: http://www.veranu.eu/files/Company_Profile_Veranu_EN.pdf (accessed on 10 September 2021).
- Veranu, the Startup That Generates Energy Step by Step. Available online: https://blog.treedom.net/en/blog/post/veranu-the-startup-that-generates-energy-step-by-step-1919 (accessed on 15 September 2021).
- Duarte, F.; Casimiro, F.; Azevedo, E.D. Pavement Module for Generating Electric Energy from the Movement of People and Vehicles. World Int. Property Org. WO2011145057A2, 24 November 2011. Available online: https://patents.google.com/patent/WO2011145057A2/zh (accessed on 10 June 2021).
- Duarte, F.; Casimiro, F.; Correia, D.; Mendes, R.; Ferreira, A. A New Pavement Energy Harvest System. In Proceedings of the 2013 International Renewable and Sustainable Energy Conference (IRSEC), Ouarzazate, Morocco, 7–9 March 2013; pp. 408–413. [Google Scholar]
- Bashir, M.; Rajendran, P. A Review on Electroactive Polymers Development for Aerospace Applications. J. Intell. Mater. Syst. Struct. 2018, 29, 3681–3695. [Google Scholar] [CrossRef]
- Moretti, G.; Rosset, S.; Vertechy, R.; Anderson, I.; Fontana, M. A Review of Dielectric Elastomer Generator Systems. Adv. Intell. Syst. 2020, 2, 2000125. [Google Scholar] [CrossRef]
- Zhou, J.; Jiang, L.; Khayat, R. Investigation on the Performance of a Viscoelastic Dielectric Elastomer Membrane Generator. Soft Matter 2015, 11, 2983–2992. [Google Scholar] [CrossRef]
- McKay, T.G.; Rosset, S.; Anderson, I.A.; Shea, H. An Electroactive Polymer Energy Harvester for Wireless Sensor Networks. J. Phys. 2013, 476, 012117. [Google Scholar]
- Chiba, S.; Waki, M. Innovative Power Generator Using Dielectric Elastomers (Creating the Foundations of an Environmentally Sustainable Society). Sustain. Chem. Pharm. 2020, 15, 100205. [Google Scholar] [CrossRef]
- Redmond, E. Flooring System and Floor Tile. U.S. Patent US20130154441A1; Filed 23 September 2012, 23 June 2013. Available online: https://patents.google.com/patent/US20130154441/en?oq=powerleap (accessed on 10 June 2021).
- Powerleap. Available online: https://www.mascontext.com/tag/powerleap/ (accessed on 9 September 2021).
- The Power Beneath Your Feet, Sci-Tech—Trends in Japan. Available online: https://web-japan.org/trends/09_sci-tech/sci100107.html (accessed on 9 September 2021).
- Hayamizu, K. Electric Apparatus Provided with Power Generating Function. U.S. Patent US8686620B2, 1 April 2014. Available online: https://patents.google.com/patent/US8686620B2/en?oq=US+8%2c686%2c620+B2 (accessed on 21 June 2021).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single-Layer Piezoelectric Generator | Multi-Layer Piezoelectric Generator |
|---|---|
| Higher Output Voltage (+) | Lower Output Voltage (−) |
| Lower Output Current (−) | Higher Output Current (+) |
| Higher Output Impedance (−) | Lower Output Impedance (+) |
| Lower Inner Capacitance (−) | Higher Inner Capacitance (−) |
| Higher Polarization (−) | Lower Polarization Voltage (−) |
| Material Pair | Charge Density (C/m2) |
|---|---|
| Chromium-Chromium | 2.02 × 10–8 |
| Chromium-Steel | 3.37 × 10–8 |
| Chromium-Gold | 6.73 × 10–8 |
| Metal-SiO2 (quartz) | ~10–5 |
| Metal-NaCl | 5.0 × 10–4 |
| Metal-Nylon | ~10–3 |
| Metal-PTFE | ~10–4–10–3 |
| Metal-Polyimide | 3.0 × 10–3 |
| PENG | TENG | |
|---|---|---|
| Materials and Fabrication |
|
|
| Power density |
|
|
| Sensing (sensitivity, sensing range, response time) |
|
|
| Scalability |
|
|
| Stability |
|
|
| Biocompatibility |
|
|
| Device—Company | Uses and Features | Dimension | Output Power |
|---|---|---|---|
| V3® by Pavegen [68,70] |
| 50 cm on each side | 5 W/step |
| Sustanaible Dance Floor® by Studio Roosegaarde [75] |
| 65 cm × 65 cm × 30 cm | 25 W/module |
| Sustainable Energy Floor® by Energy Floors [77] |
| 50 cm × 50 cm × 10 cm | 2 ÷ 20 J/step |
| Smart Energy Floor® by Energy Floors [78] |
| 60 cm × 60 cm | 35 W with a 10 mm airgap |
| Hybrid Energy Tile® by OTEM2000 [81] |
| 50 cm × 50 cm; 75 cm × 75 cm; 100 cm × 100 cm | Not specified |
| Smart Energy Floor by Veranu® [83] |
| 30 cm × 30 cm × 4 cm | 2 W/step |
| Waynergy tiles by Waydip Co. [87] |
| 40 cm × 40 cm | 10 W |
| Dielectric Elastomer Generator [92] |
| 11 mm × 11 mm × 9 mm (11 mm is the diameter) | 300 µW @ 0.5Hz |
| Powerleap tiles [94,95] |
| 24″ × 24″ | 0.5 mW/step |
| Power Generating Floor™ by SoundPower [96,97] |
| 50 cm × 50 cm | 0.1 W/step |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Visconti, P.; Bagordo, L.; Velázquez, R.; Cafagna, D.; De Fazio, R. Available Technologies and Commercial Devices to Harvest Energy by Human Trampling in Smart Flooring Systems: A Review. Energies 2022, 15, 432. https://doi.org/10.3390/en15020432
Visconti P, Bagordo L, Velázquez R, Cafagna D, De Fazio R. Available Technologies and Commercial Devices to Harvest Energy by Human Trampling in Smart Flooring Systems: A Review. Energies. 2022; 15(2):432. https://doi.org/10.3390/en15020432
Chicago/Turabian StyleVisconti, Paolo, Laura Bagordo, Ramiro Velázquez, Donato Cafagna, and Roberto De Fazio. 2022. "Available Technologies and Commercial Devices to Harvest Energy by Human Trampling in Smart Flooring Systems: A Review" Energies 15, no. 2: 432. https://doi.org/10.3390/en15020432