
Low-Cost Maximum Power Point Tracking Strategy and Protection Circuit Applied to an Ayanz Wind Turbine with Screw Blades

 and
and
Abstract
:1. Introduction
2. Wind Turbines under Study
3. Experimental Comparison of Both Wind Turbines under Study
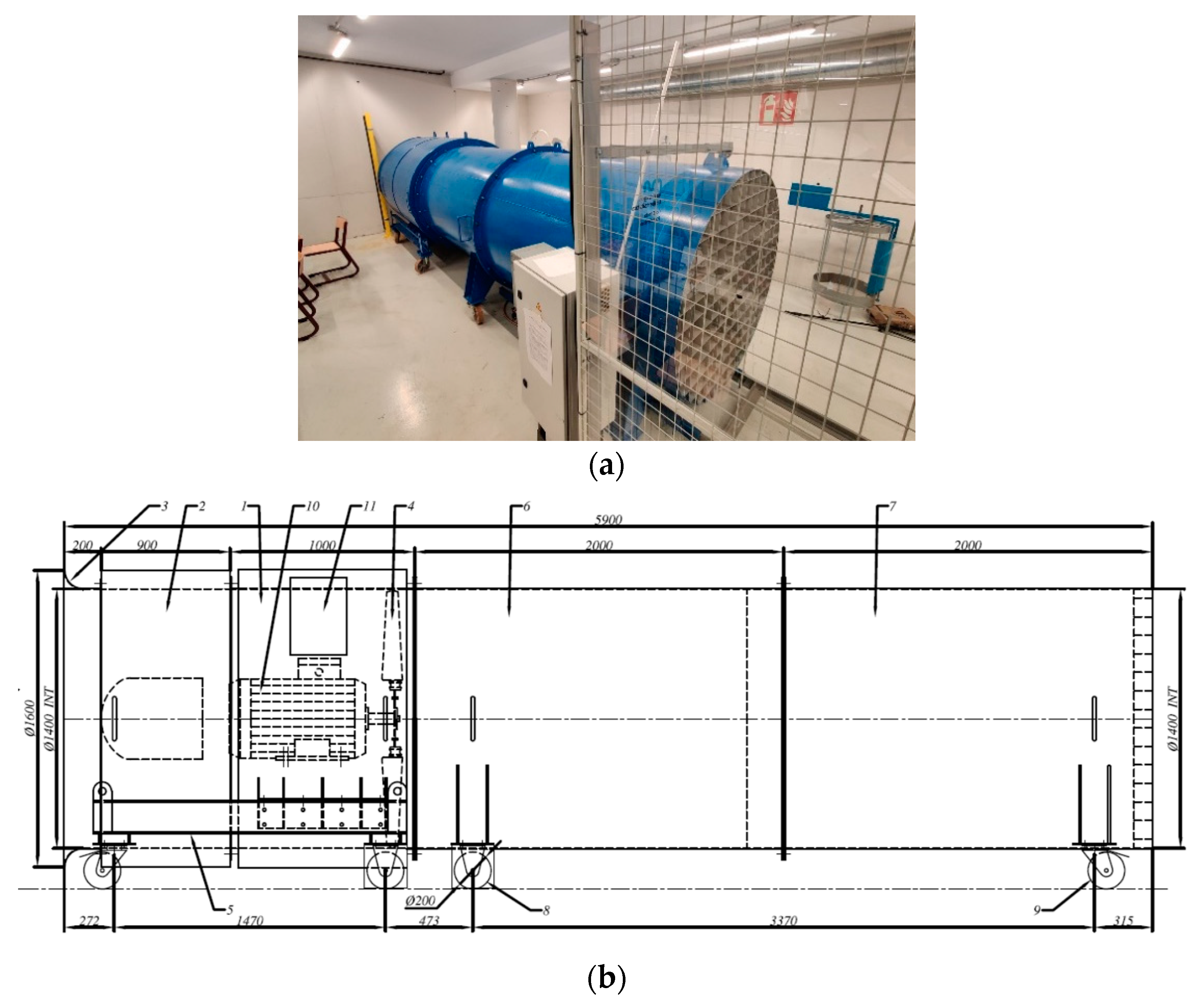
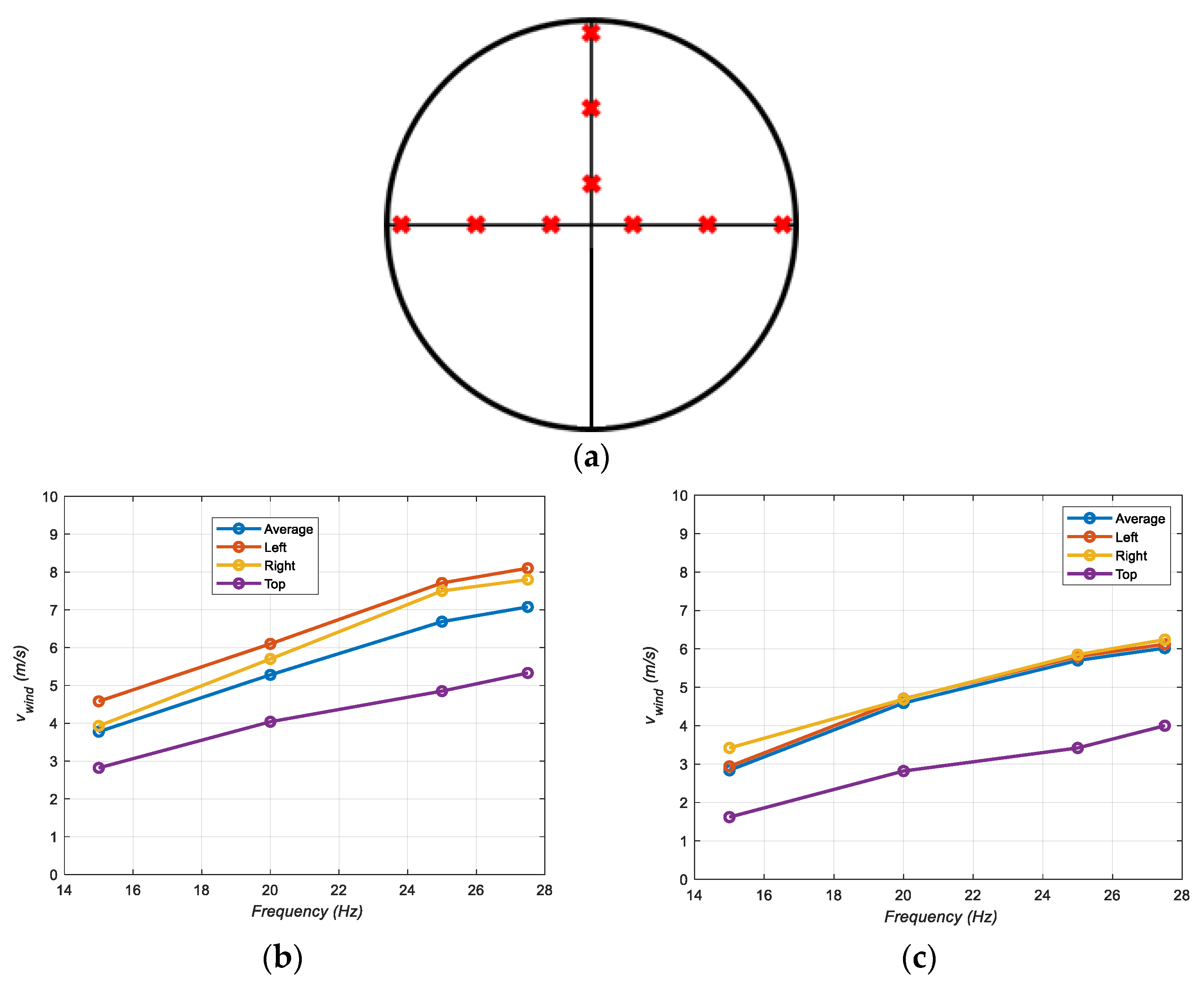
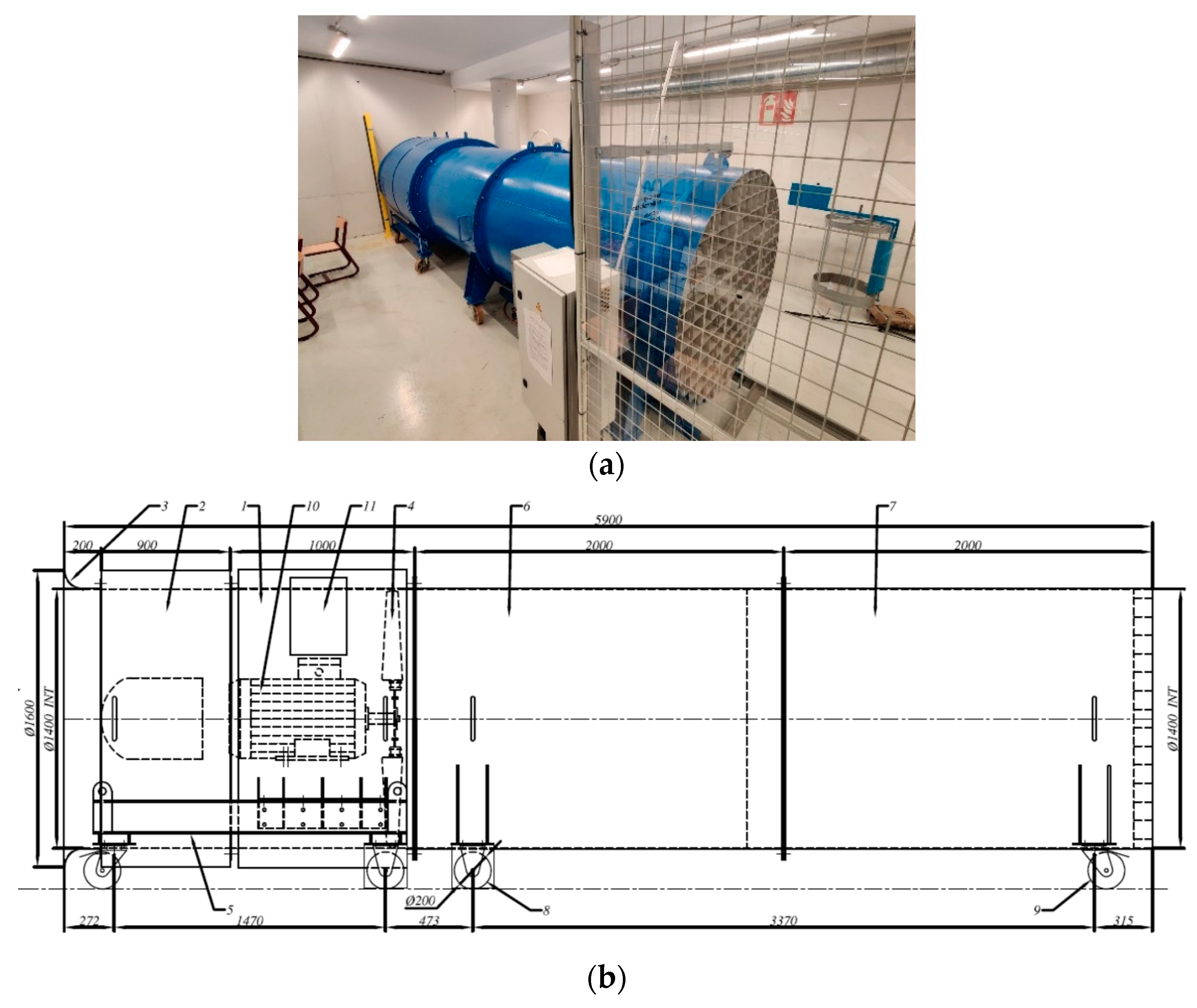
3.1. Wind Maker Characterization
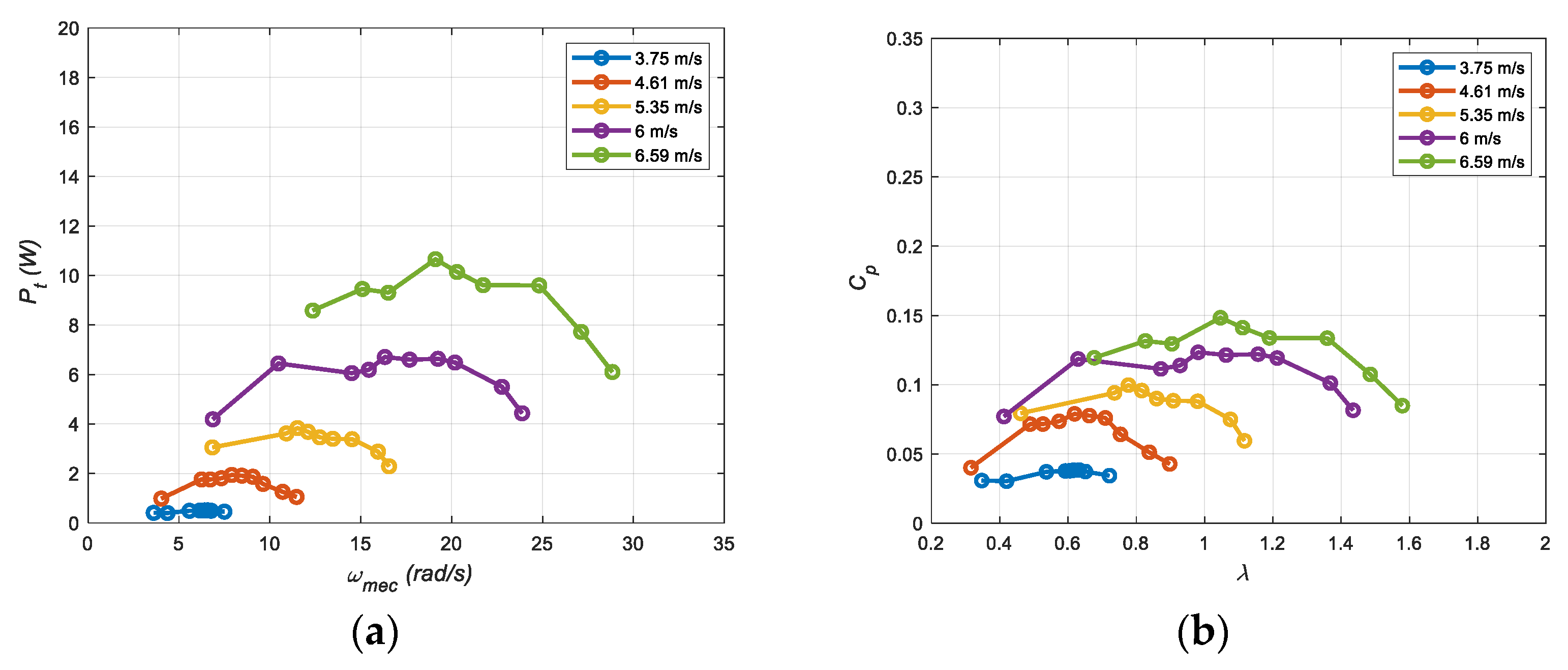
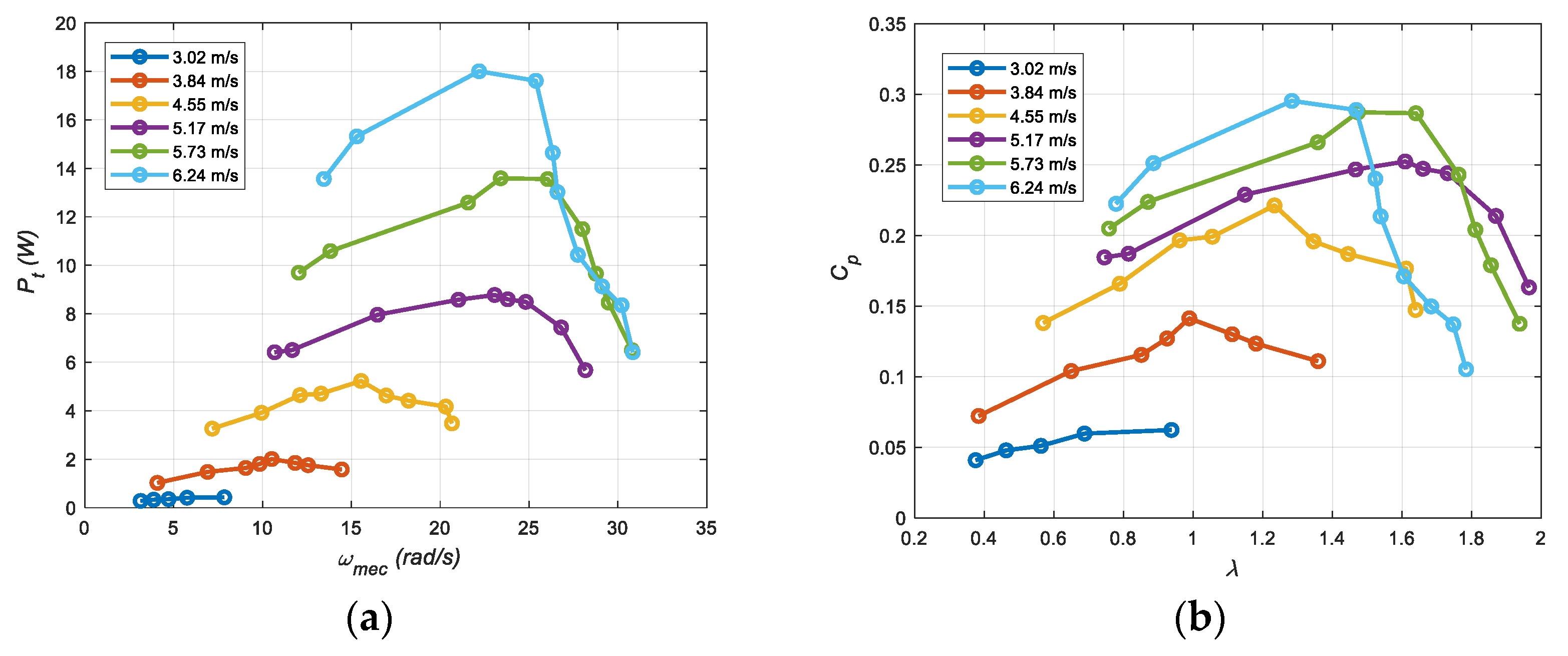
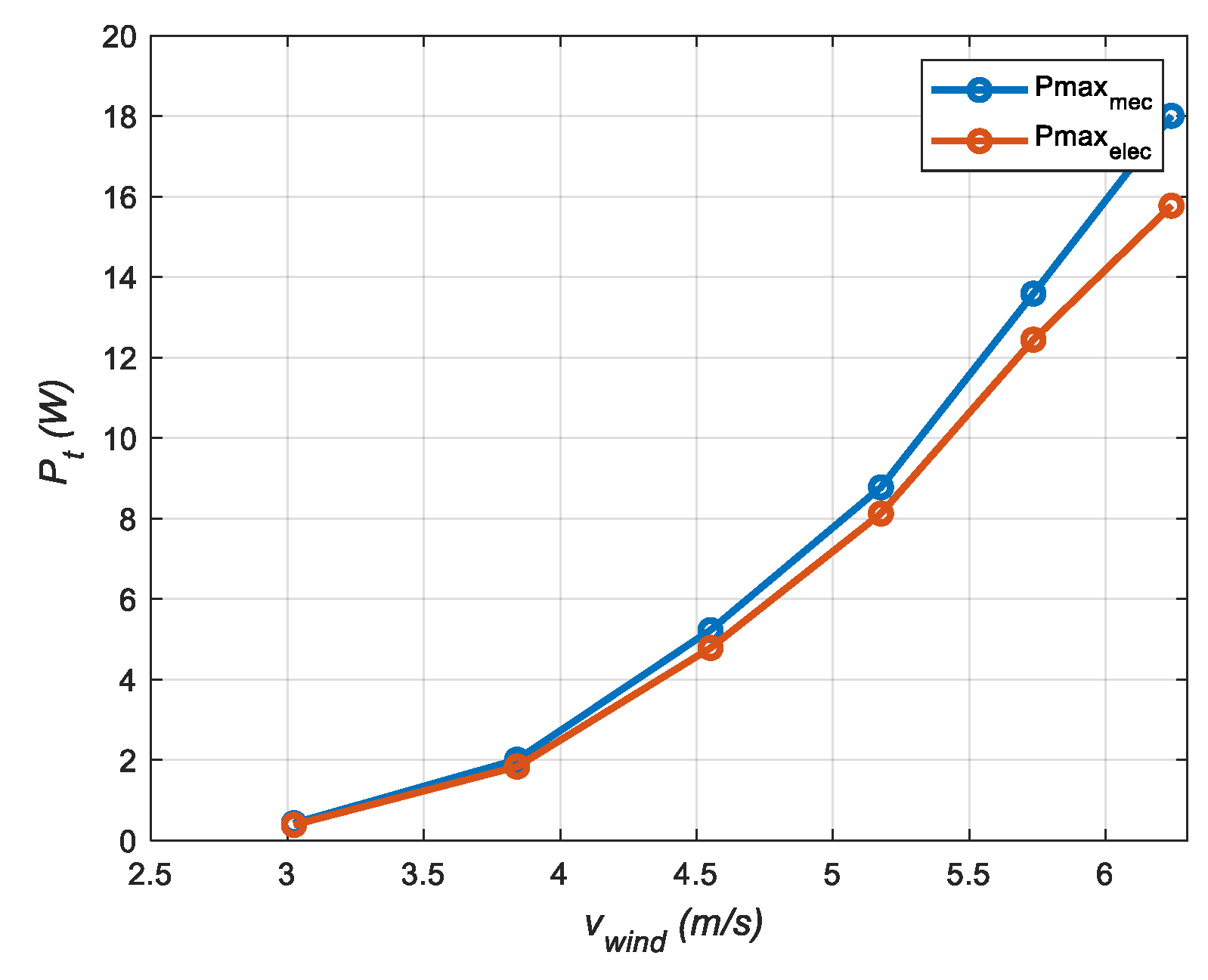
3.2. Wind Turbine Characterization without Tube
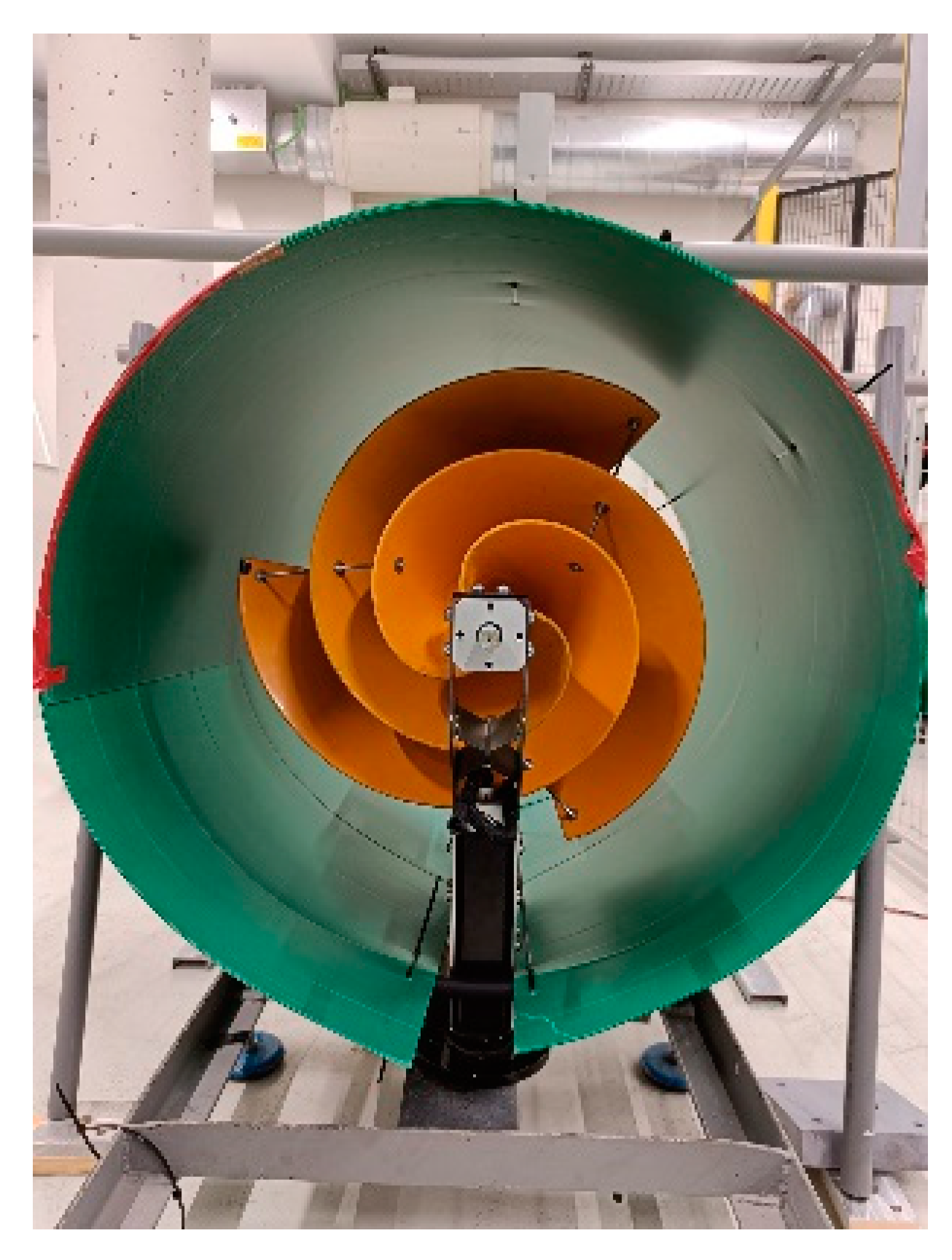
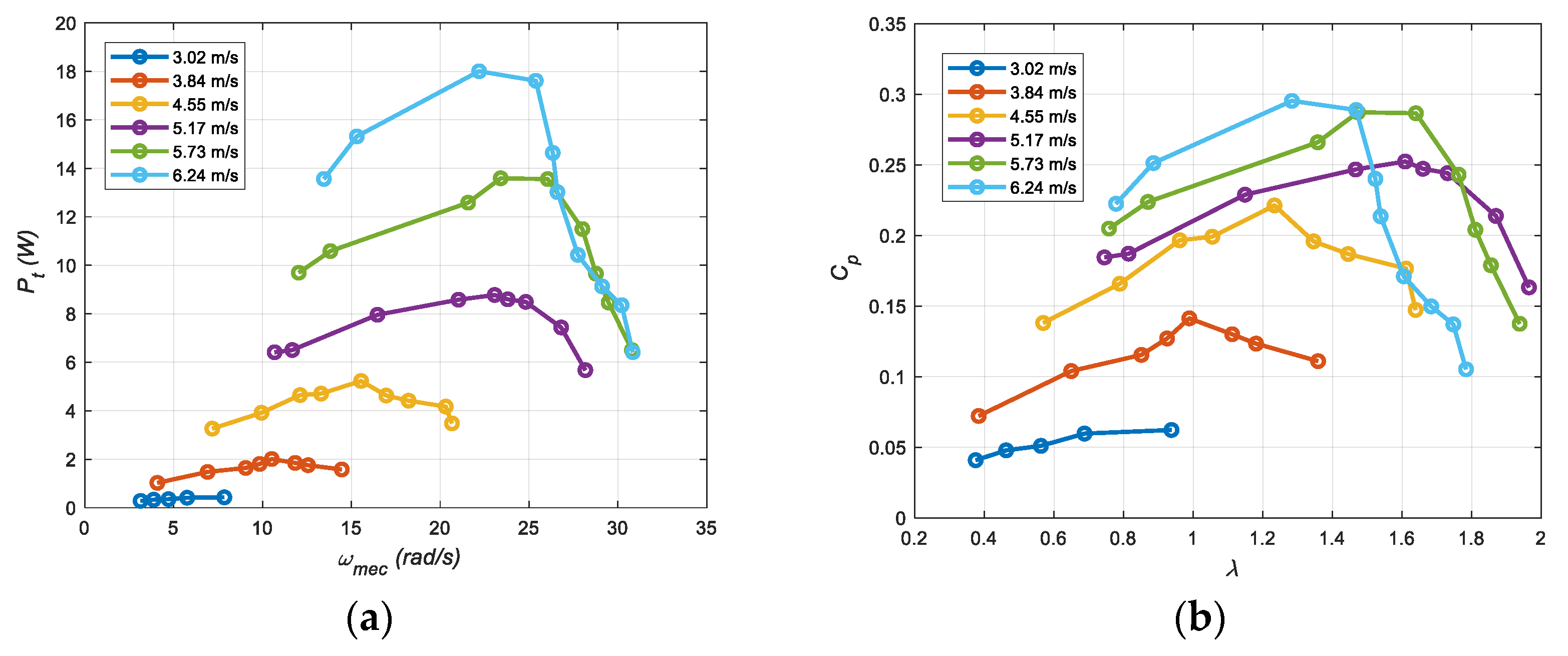
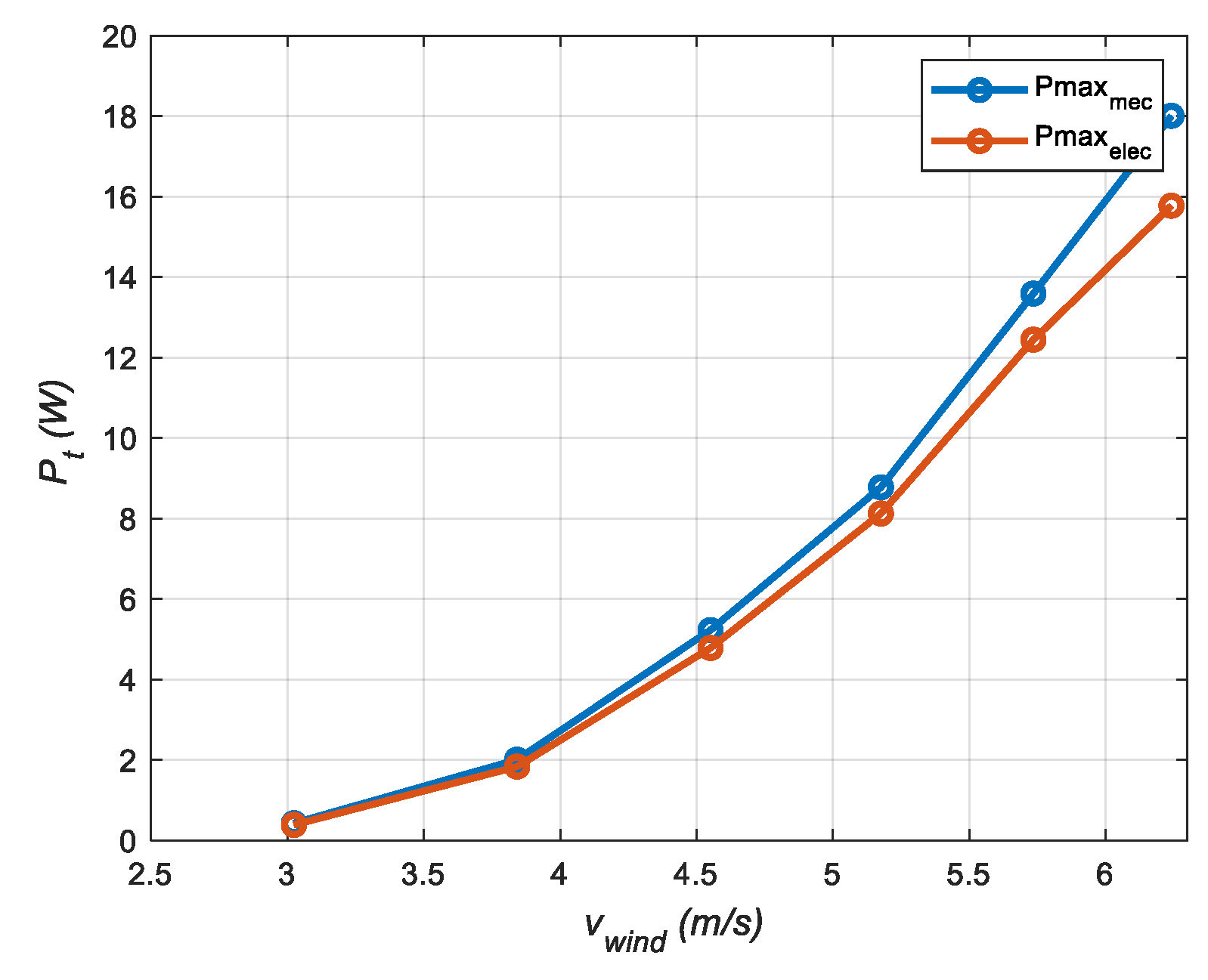
3.3. Wind Turbine Characterization with Tube
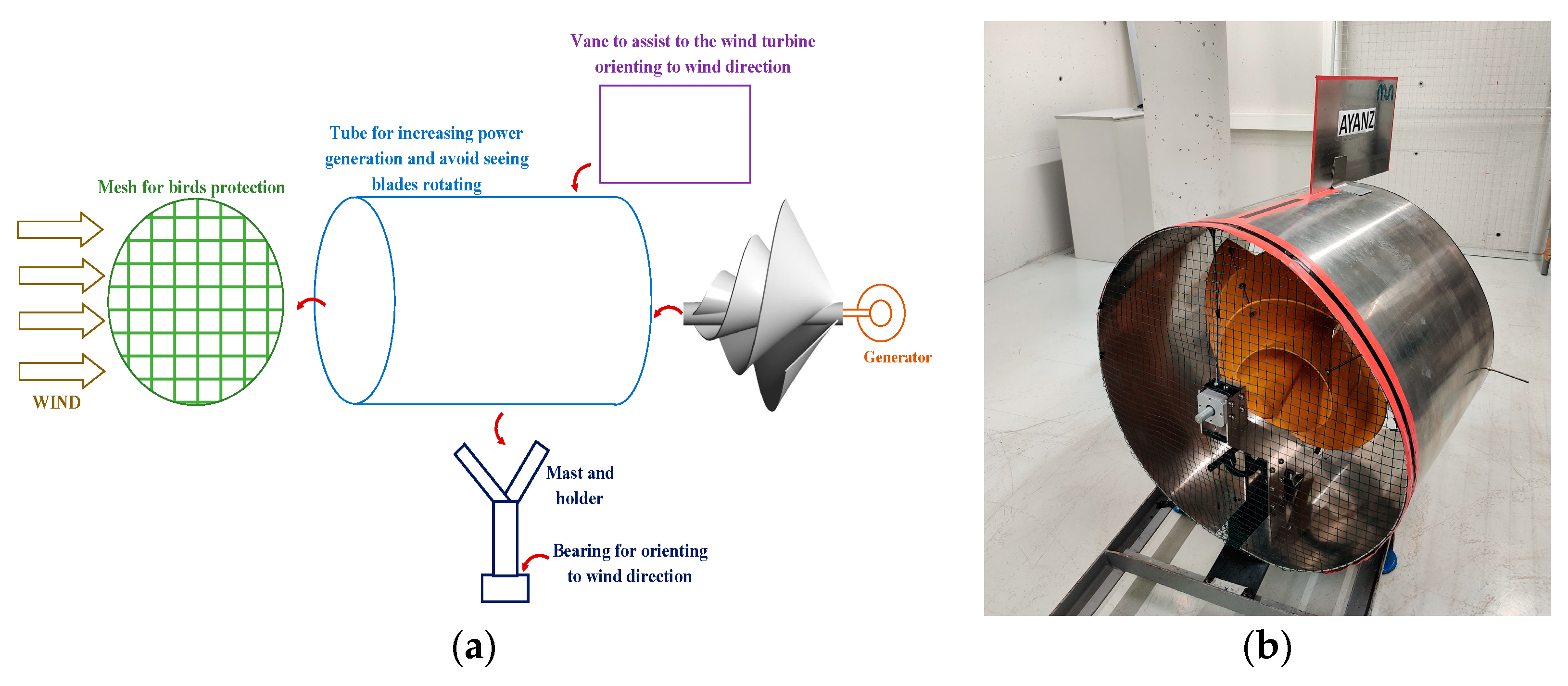
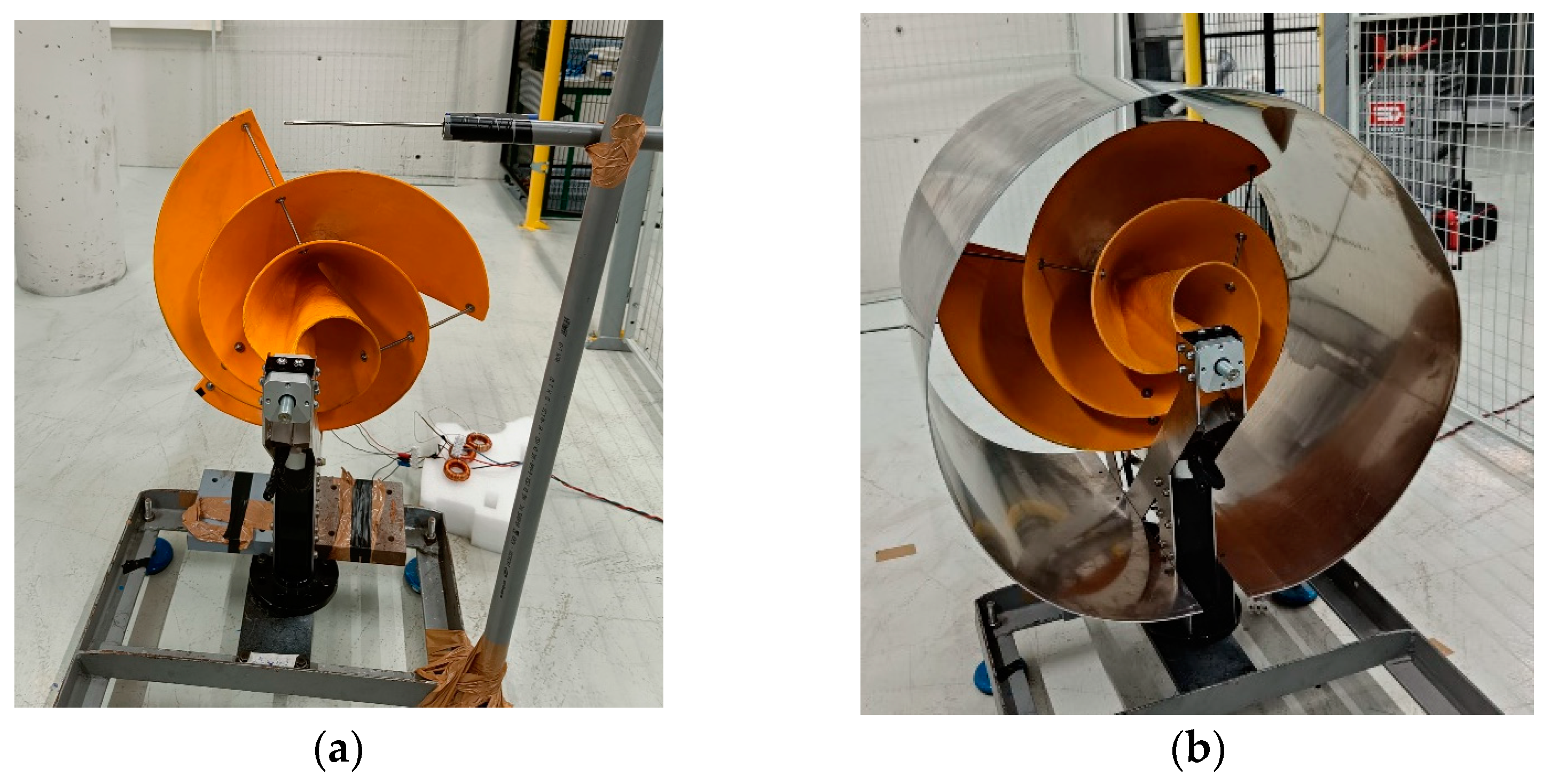
- Follow the original patent of Ayanz (Figure 1a).
- Cover the blades as much as possible with the tube, so the possibility to see and hear the blades rotating is minimized, which is demanded by many potential users of these types of small wind turbines.
- Allow the possibility to include one or two (in front and behind if wanted) protective meshes at the tube in order to minimize bird deaths. This aspect is presented in the next sub-section.
3.4. Final Wind Turbine Proposal
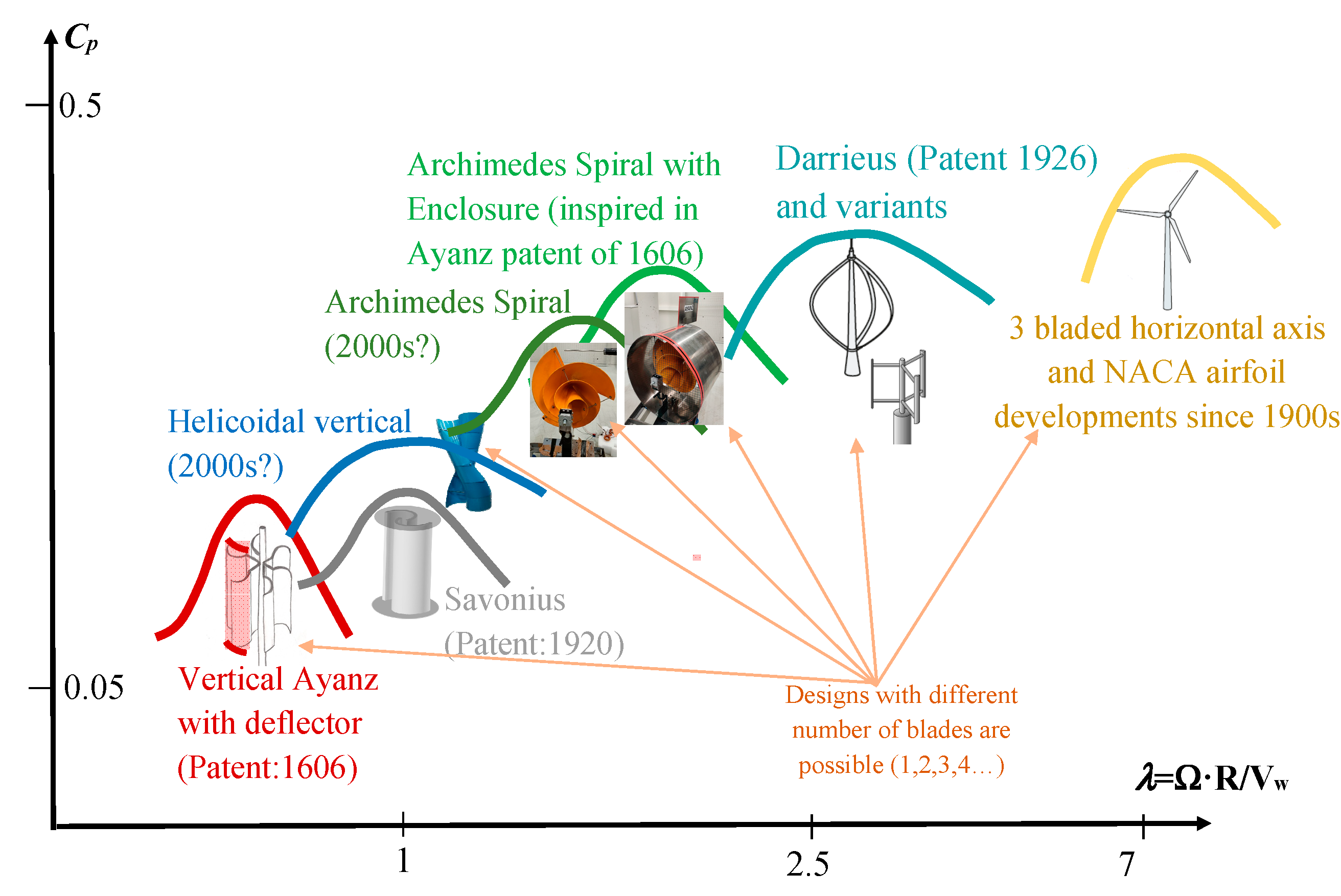
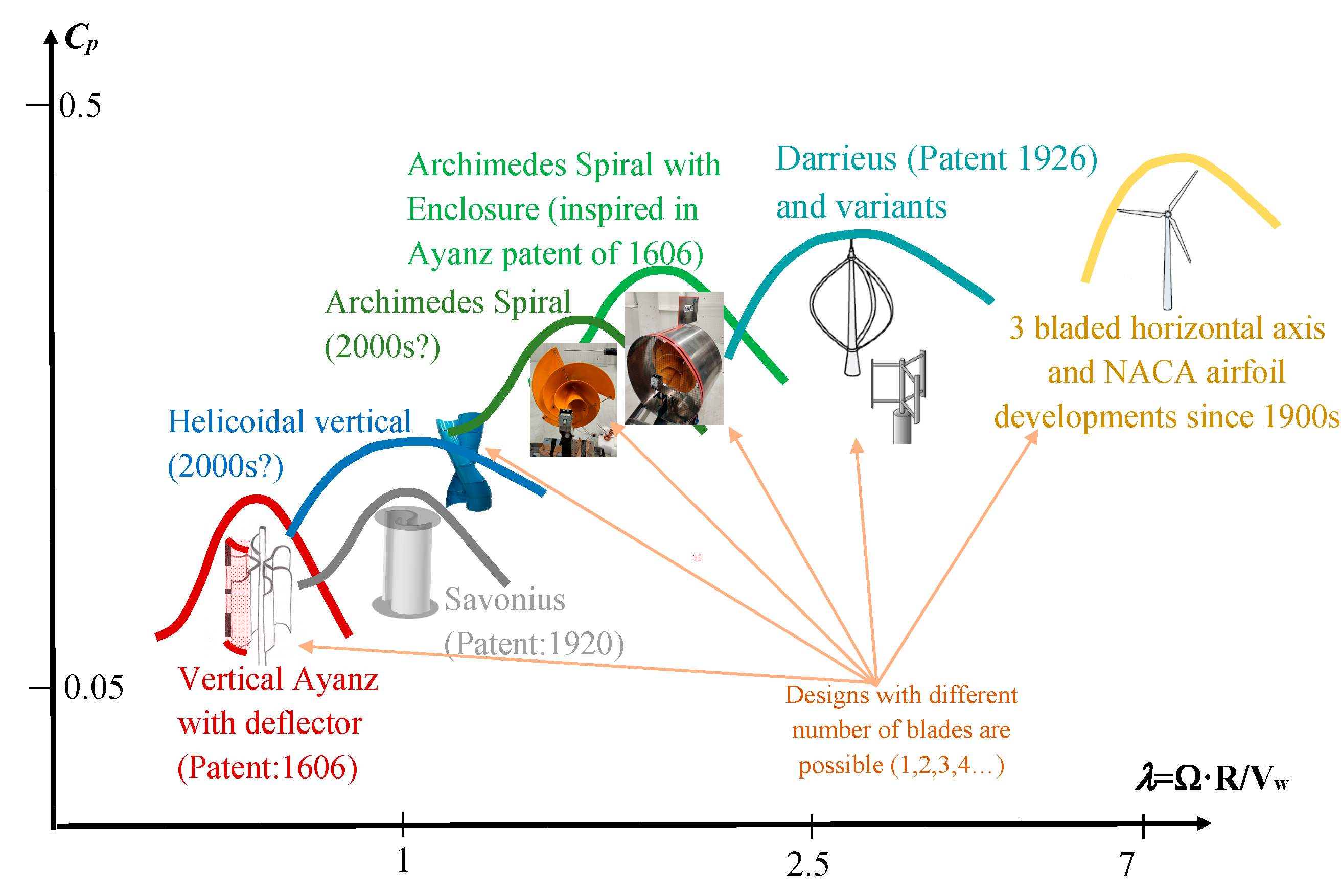
3.5. Comparison to Other Common Wind Turbines
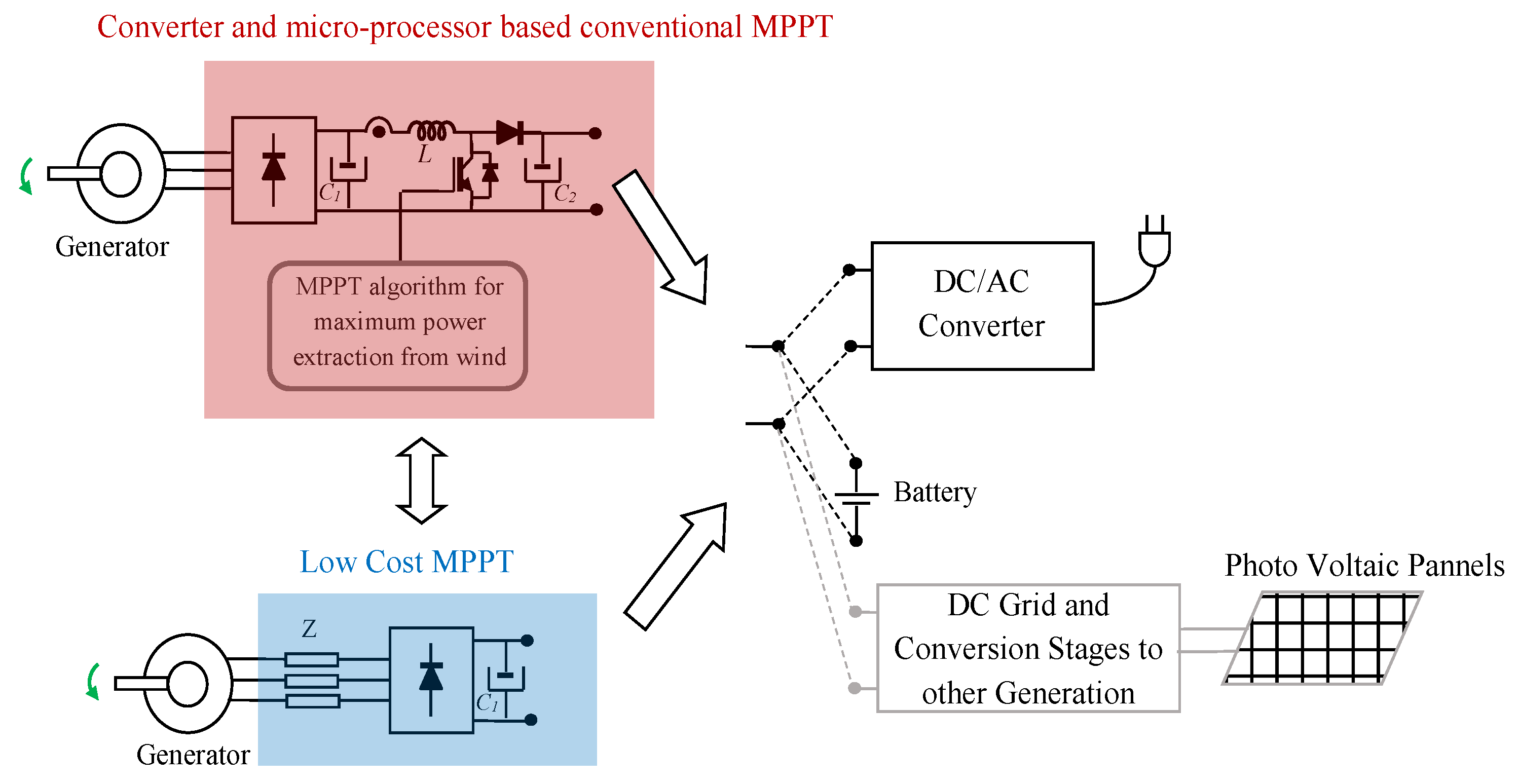
4. Low-Cost Maximum Power Point Tracking (MPPT) Strategy
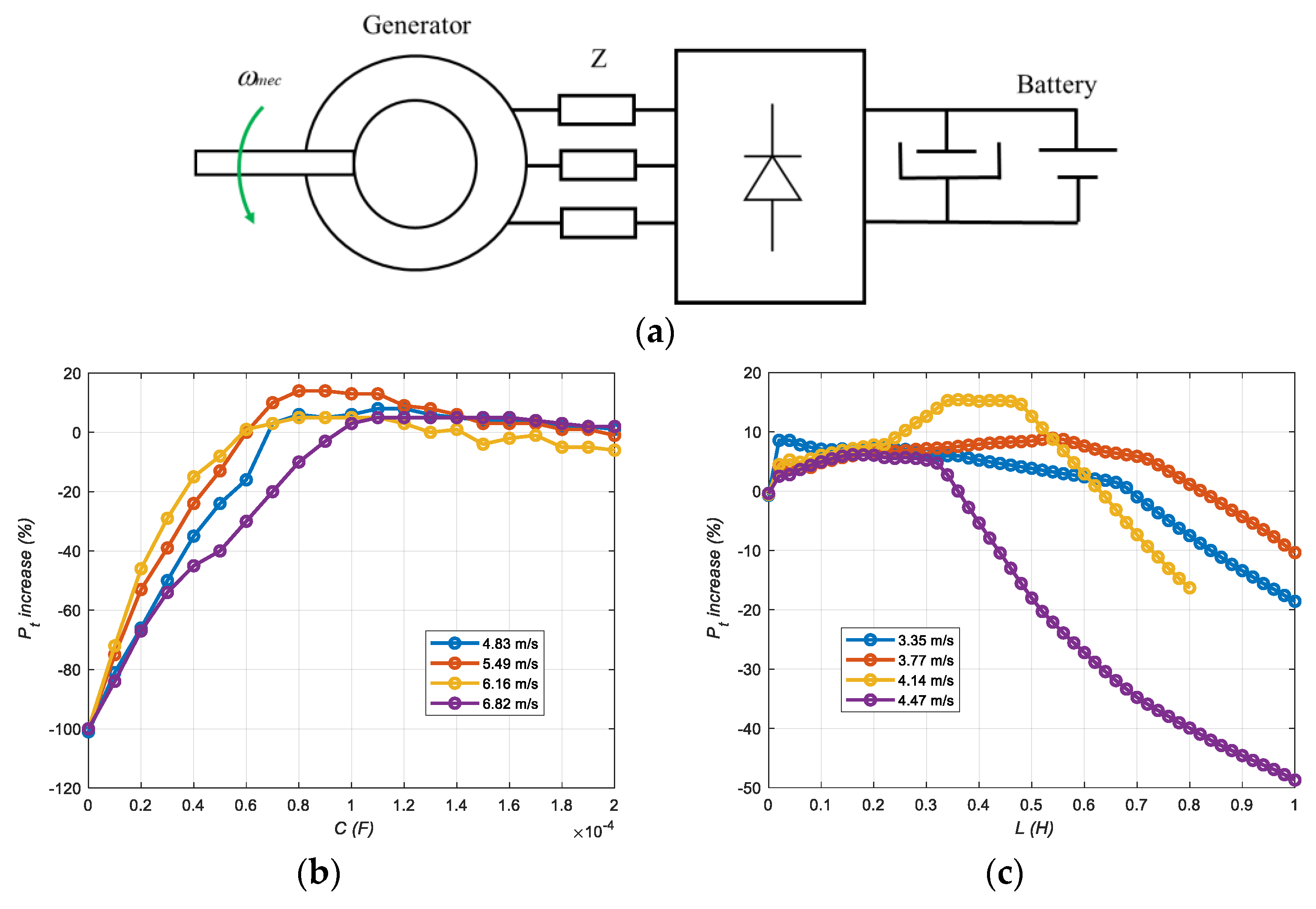
4.1. Substitution of the DC-DC Converter and Microprocessor by a Three-Phase Impedance at the AC Side
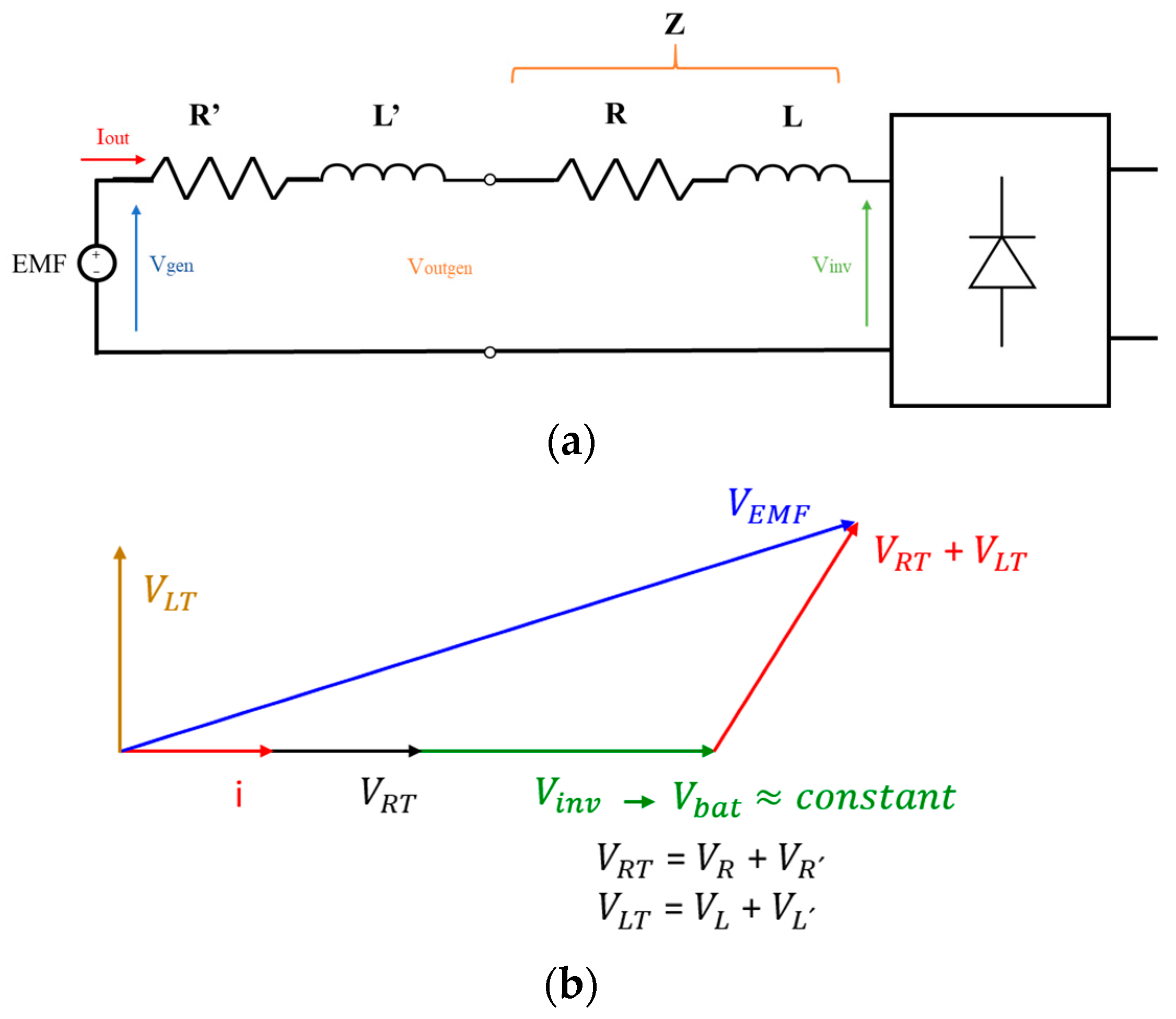
4.2. Analysis and Design of the AC Side Impedance for the Proposed Low-Cost MPPT
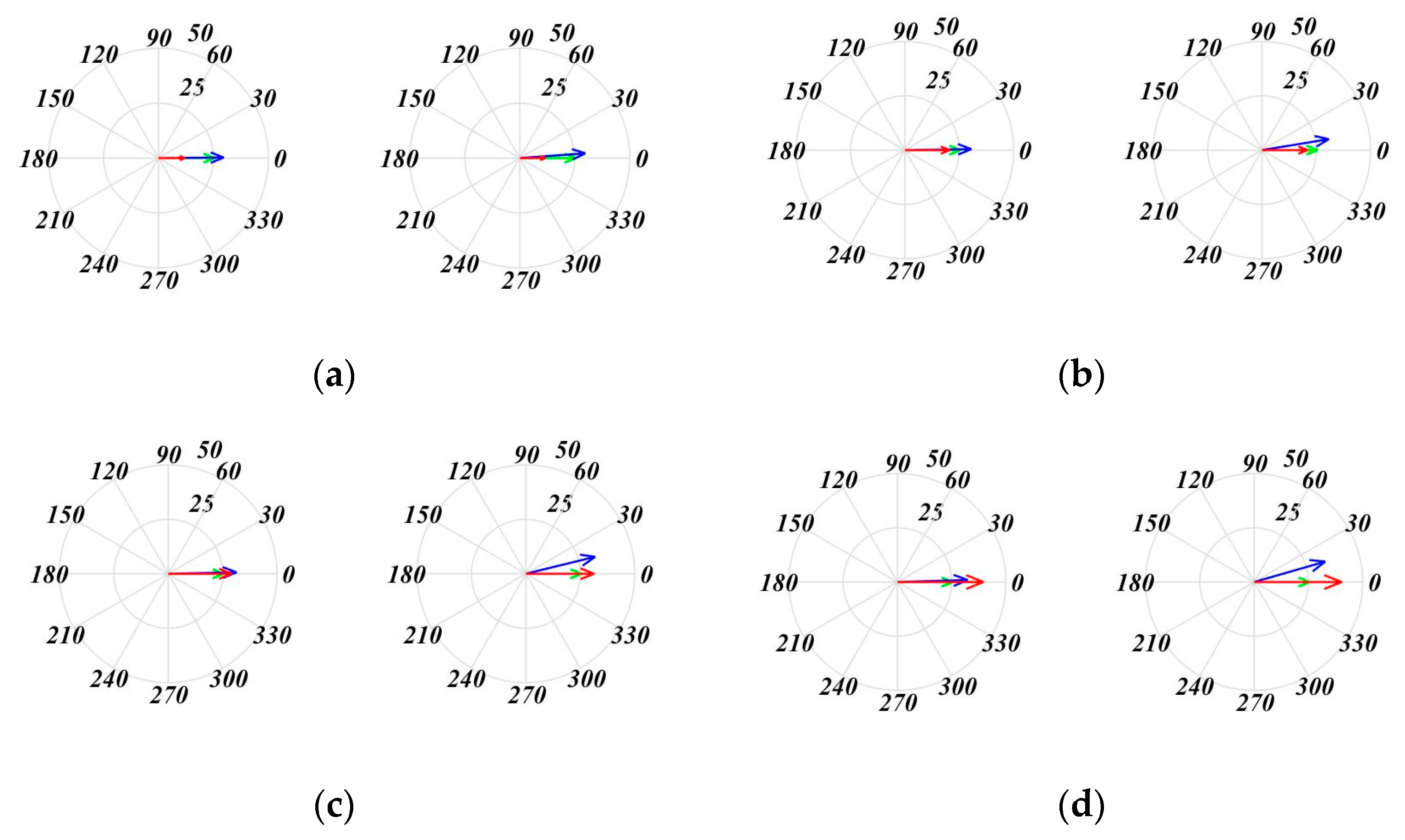
4.3. Physical Explanation of the Impedance Based Low-Cost MPPT and THD Performance of the Current
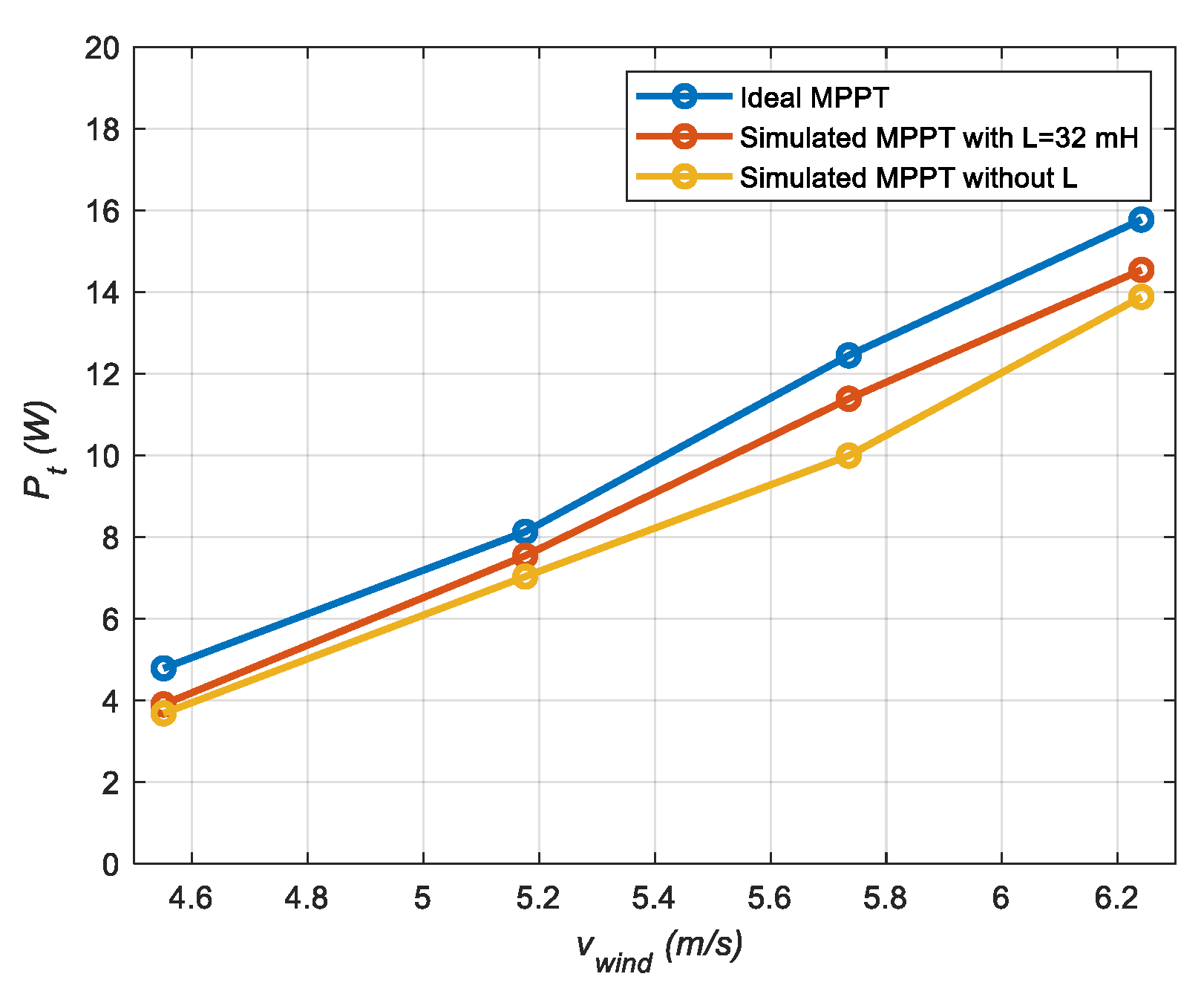
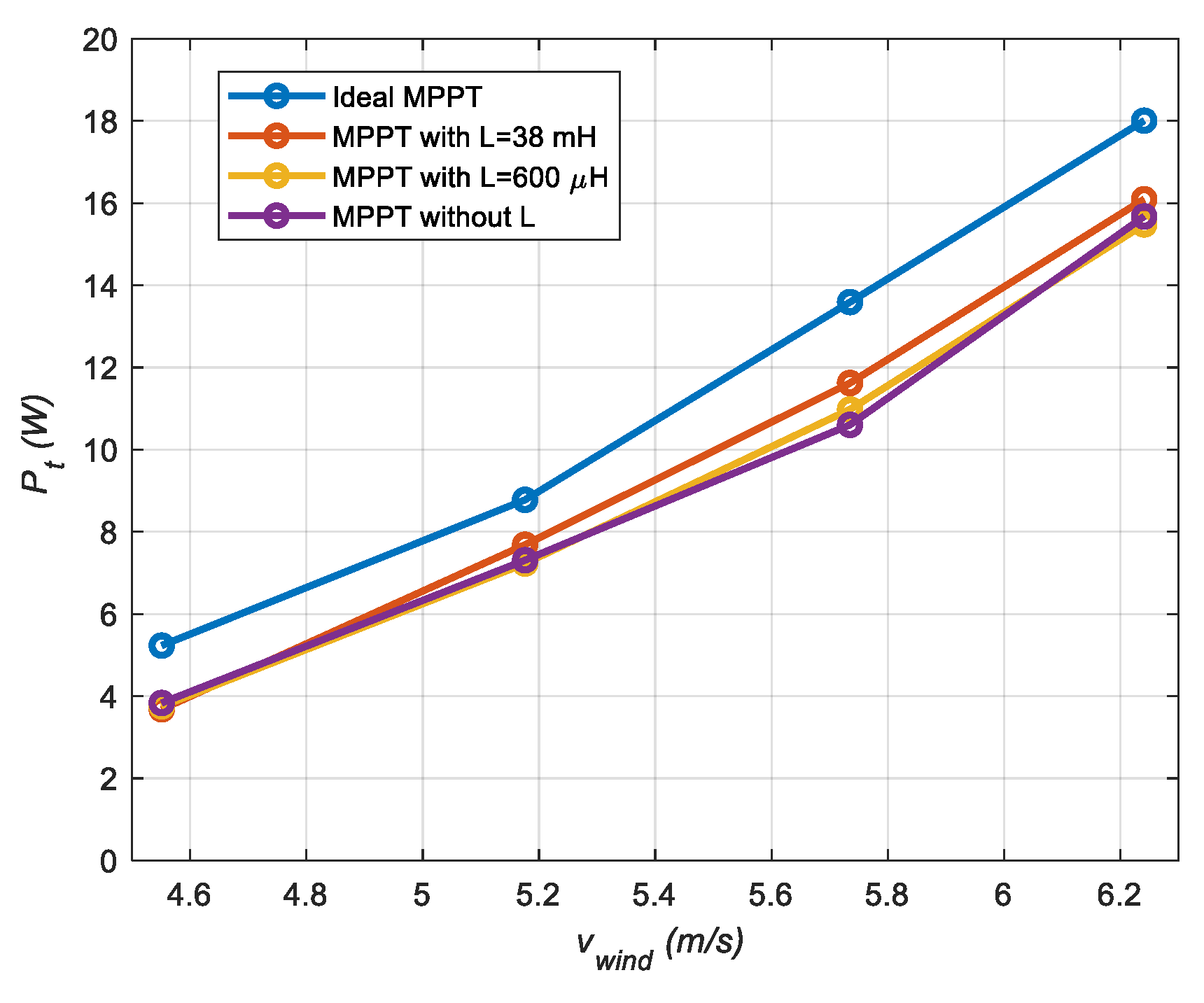
4.4. Experimental Validation
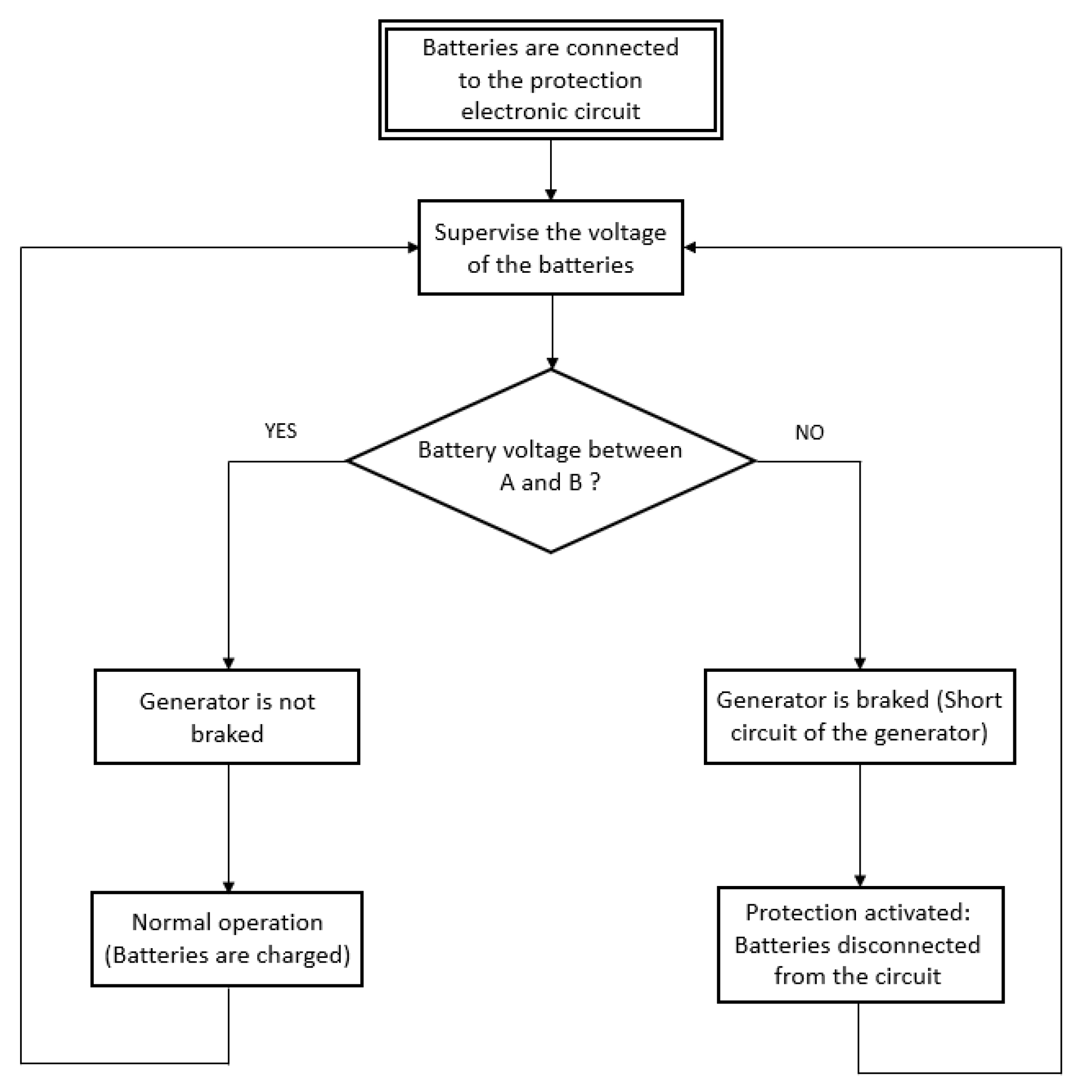
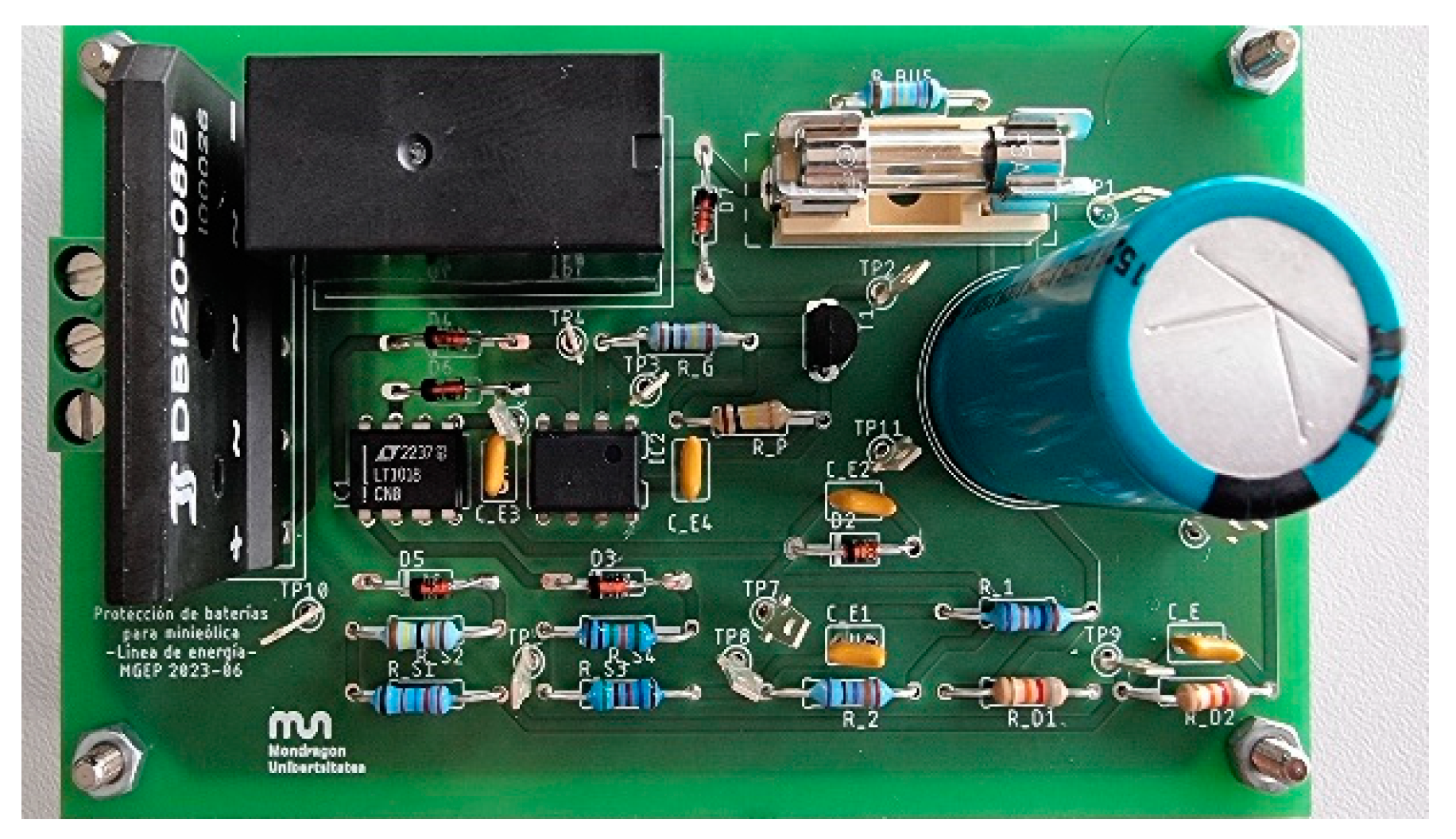
5. Protection Electronic Circuit
5.1. Description of the Circuit
5.1.1. Comparator Window
5.1.2. Schmitt Trigger
5.1.3. Relay Governance
5.1.4. Relay
5.1.5. Bus Capacitor
5.1.6. Over-Current Protection
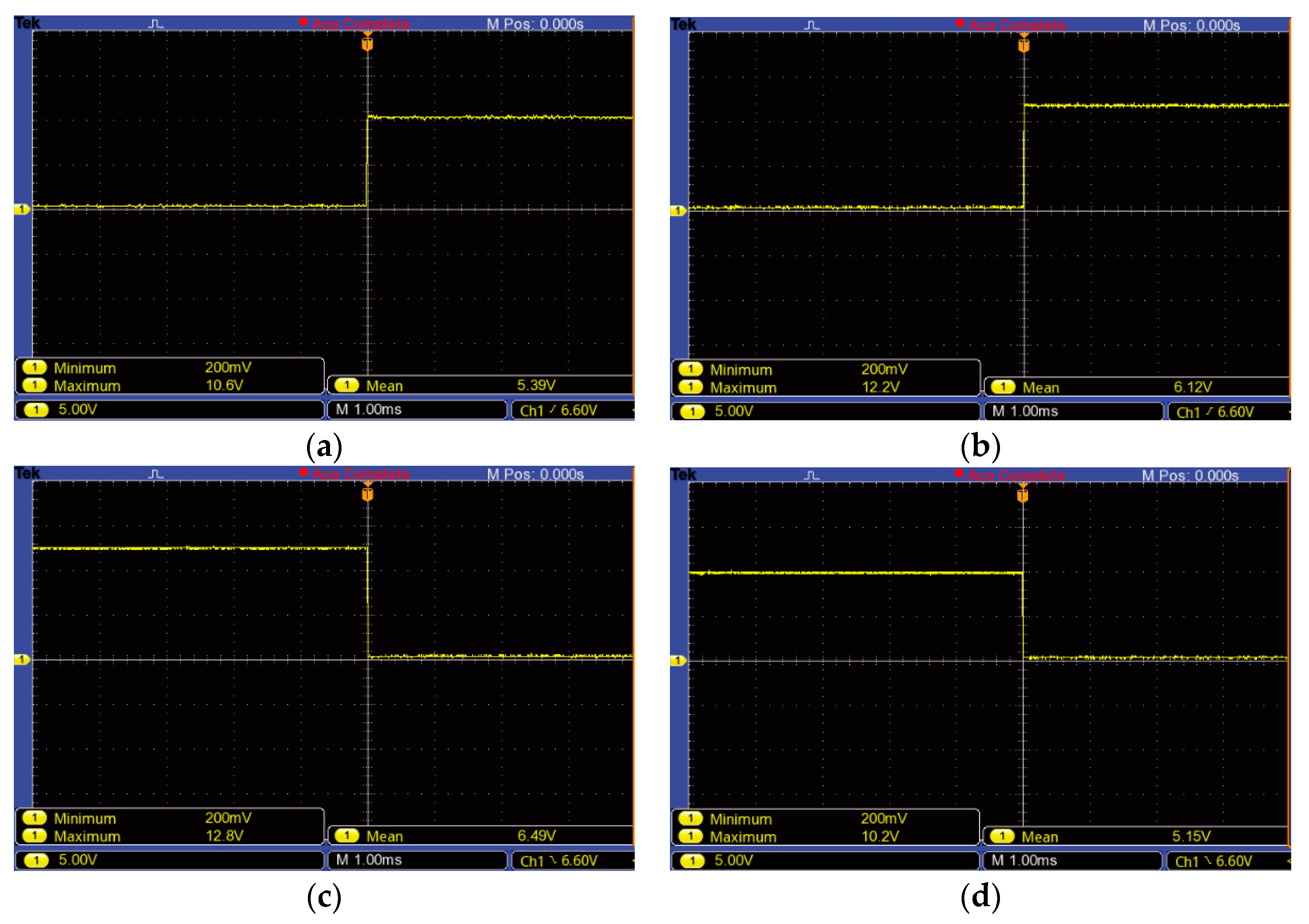
5.2. Experimental Validation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| λ: | tip speed ratio |
| Vw: | Wind speed [m/s] |
| Cp: | Power coefficient |
| ρ: | Density of air (1.225 kg/m2) |
| ωmec: | Rotational speed of the wind turbine [rad/s] |
| R’: | Internal phase resistance of the generator [Ω] |
| L’: | Internal phase inductance of the generator [H] |
| : | Flux created by the magnets at the rotor of the generator [Wb] |
| Z: | Impedance for the low cost MPPT |
| R: | Phase resistance of the impedance for the low cost MPPT [Ω] |
| L: | Phase inductance of the impedance for the low cost MPPT [H] |
| C: | Phase capacitance of the impedance for the low cost MPPT [H] |
| Vbus: | DC voltage of the protection circuit [V] |
| Vbat: | DC voltage of the battery [V]. When correct operation Vbat = Vbus. |
| A: | Lower voltage limit for safe operation of the batteries [V]. |
| B: | Upper voltage limit for safe operation of the batteries [V]. |
References
- El Periódico de la Energía. España Duplica el Autoconsumo Solar: Instala más de 2.500 MW en 2022. 23 January 2023. Available online: https://elperiodicodelaenergia.com/espana-duplica-autoconsumo-solar-espana-instala-2-500-mw-2022/ (accessed on 22 August 2023).
- Cuenca, J.J.; Jamil, E.; Hayes, B. State of the Art in Energy Communities and Sharing Economy Concepts in the Electricity Sector. IEEE Trans. Ind. Appl. 2021, 57, 5737–5746. [Google Scholar] [CrossRef]
- Huang, S.; Wang, J.; Fu, Y.; Zuo, W.; Hinkelman, K.; Kaiser, R.M.; He, D.; Vrabie, D. An open-source virtual testbed for a real Net-Zero Energy Community. Sustain. Cities Soc. 2021, 75, 103255. [Google Scholar] [CrossRef]
- Salehi, N.; Martínez-García, H.; Velasco-Quesada, G.; Guerrero, J.M. A Comprehensive Review of Control Strategies and Optimization Methods for Individual and Community Microgrids. IEEE Access 2022, 10, 15935–15955. [Google Scholar] [CrossRef]
- Maldar, N.R.; Ng, C.Y.; Oguz, E. A review of the optimization studies for Savonius turbine considering hydrokinetic applications. Energy Convers. Manag. 2020, 226, 113495. [Google Scholar] [CrossRef]
- Tummala, A.; Velamati, R.K.; Sinha, D.K.; Indraja, V.; Krishna, V.H. A review on small scale wind turbines. Renew. Sustain. Energy Rev. 2016, 56, 1351–1371. [Google Scholar] [CrossRef]
- Zagubień, A.; Wolniewicz, K. Energy Efficiency of Small Wind Turbines in an Urbanized Area—Case Studies. Energies 2022, 15, 5287. [Google Scholar] [CrossRef]
- Tsichritzis, L.; Nikolopoulou, M. The effect of building height and façade area ratio on pedestrian wind comfort of London. J. Wind Eng. Ind. Aerodyn. 2019, 191, 63–75. [Google Scholar] [CrossRef]
- Heikal, H.A.; Abu-Elyazeed, O.S.; Nawar, M.A.; Attai, Y.A.; Mohamed, M.M. On the actual power coefficient by theoretical developing of the diffuser flange of wind-lens turbine. Renew Energy 2018, 125, 295–305. [Google Scholar] [CrossRef]
- Sakamoto, L.; Fukui, T.; Morinishi, K. Blade Dimension Optimization and Performance Analysis of the 2-D Ugrinsky Wind Turbine. Energies 2022, 15, 2478. [Google Scholar] [CrossRef]
- Rajpar, A.H.; Ali, I.; Eladwi, A.E.; Bashir, M.B.A. Recent Development in the Design of Wind Deflectors for Vertical Axis Wind Turbine: A Review. Energies 2021, 14, 5140. [Google Scholar] [CrossRef]
- Abad, G.; Zarketa-Astigarraga, M.P.Y.A. Molinos de Viento Patentados por Jerónimo de Ayanz y Beaumont en el año 1606; un Análisis Conceptual Desde una Perspectiva Ingenieril del Año 2021; Mondragon Unibertsitatea: Mondragón, Spain, 2021. [Google Scholar]
- Tapia, N.G. Jerónimo de Ayanz y Beaumont. Un Inventor Navarro (1553–1613); Universidad Pública de Navarra: Pamplona, Spain, 2010. [Google Scholar]
- Liam F1 Archimedes AWM-750D-150W Datasheet. (Liam F1 Archimedes). Available online: https://thearchimedes.com/products (accessed on 14 June 2023).
- Jang, H.; Kim, D.; Hwang, Y.; Paek, I.; Kim, S.; Baek, J. Analysis of Archimedes Spiral Wind Turbine Performance by Simulation and Field Test. Energies 2019, 12, 4624. [Google Scholar] [CrossRef]
- Kim, K.C.; Ji, H.S.; Kim, Y.K.; Lu, Q.; Baek, J.H.; Mieremet, R. Experimental and Numerical Study of the Aerodynamic Characteristics of an Archimedes Spiral Wind Turbine Blade. Energies 2014, 7, 7893–7914. [Google Scholar] [CrossRef]
- Refaie, A.G.; Hameed, H.A.; Nawar, M.A.; Attai, Y.A.; Mohamed, M.H. Qualitative and quantitative assessments of an Archimedes Spiral Wind Turbine performance augmented by a concentrator. Energy 2021, 231, 121128. [Google Scholar] [CrossRef]
- Mustafa, A.T.; Jaleel, H.A. A comparison study between Archimedes spiral turbine and propeller turbine with wind attack angle effect. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2020; Volume 2213, p. 25. [Google Scholar]
- Nepal, U.; Sapkota, S.; Bhattarai, A.; Bashyal, H.P. Design, CFD analysis and modelling of archimedean-spiral type wind turbine. In Proceedings of the IOE Graduate Conference 2019, Lalitpur, Nepal, 23 May 2019. [Google Scholar]
- Safdari, A.; Kim, K.C. Aerodynamic and structural evaluation of horizontal Archimedes spiral wind turbine. J. Clean Energy Technol. 2015, 3, 34–38. [Google Scholar] [CrossRef]
- Timmer, W.A.; Toet, S. Verslag van de Metingen aan de Archimedes in de Lage-Snelheids Windtunnel van DNW; TU Delft: Delft, The Netherlands, 2009. [Google Scholar]
- Phillips, D.G. An Investigation of Diffuser Augmented Wind Turbine Design. Ph.D. Thesis, The University of Auckland, Auckland, New Zealand, 2003. [Google Scholar]
- Ghajar, R.F.; Badr, E.A. An experimental study of a collector and diffuser system on a small demonstration wind turbine. Int. J. Mech. Eng. Educ. 2008, 36, 58–68. [Google Scholar] [CrossRef]
- Njiri, J.G.; Söffker, D. State-of-the-art in wind turbine control: Trends and challenges. Renew. Sustain. Energy Rev. 2016, 60, 377–393. [Google Scholar] [CrossRef]
- Pande, J.; Nasikkar, P.; Kotecha, K.; Varadarajan, V. A Review of Maximum Power Point Tracking Algorithms for Wind Energy Conversion Systems. J. Mar. Sci. Eng. 2021, 9, 1187. [Google Scholar] [CrossRef]
- Kumar, D.; Chatterjee, K. A review of conventional and advanced MPPT algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Musunuri, S.; Ginn, H.L. Comprehensive review of wind energy maximum power extraction algorithms. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011. [Google Scholar]
- Mousa, H.H.H.; Youssef, A.R.; Mohamed, E.E.M. State of the art perturb and observe MPPT algorithms based wind energy conversion systems: A technology review. Int. J. Electr. Power Energy Syst. 2021, 126, 106598. [Google Scholar] [CrossRef]
- Mousa, H.H.; Youssef, A.R.; Mohamed, E.E. Variable step size P&O MPPT algorithm for optimal power extraction of multi-phase PMSG based wind generation system. Int. J. Electr. Power Energy Syst. 2019, 108, 218–231. [Google Scholar]
- Watil, A.; El Magri, A.; Raihani, A.; Lajouad, R.; Giri, F. Multi-objective output feedback control strategy for a variable speed wind energy conversion system. Int. J. Electr. Power Energy Syst. 2020, 121, 106081. [Google Scholar] [CrossRef]
- Ali, M.M.; Youssef, A.R.; Ali, A.S.; Abdel-Jaber, G.T. Variable step size PO MPPT algorithm using model reference adaptive control for optimal power extraction. Int. Trans. Electr. Energy Syst. 2020, 30, e12151. [Google Scholar] [CrossRef]
- Balasundar, C.; Sudharshanan, S.; Elakkiyavendan, R. Design of an Optimal Tip Speed Ratio Control MPPT Algorithm for Standalone WECS. Int. J. Res. Appl. Sci. Eng. Technol. 2015, 3, 5. [Google Scholar]
- Nagarajan, K. A Predictive hill climbing algorithm for real valued multi-variable optimization problem like PID tuning. Int. J. Mach. Learn. Comput. 2018, 8, 14–19. [Google Scholar] [CrossRef]
- Meghni, B.; Ouada, M.; Saad, S. A novel improved variable-step-size P&O MPPT method and effective supervisory controller to extend optimal energy management in hybrid wind turbine. Electr. Eng. 2020, 102, 763–778. [Google Scholar]
- Agirre, A.; Costa, J.J.; Ezkurdia, M.; Gezala, H.; Askasibar, O.; Agirre, X.; Cabezuelo, D.; Abad, G. Experimental characterization of the Ayanz vertical axis windmill in mini wind applications and contributions in the simplification of the associated electronics. Dyna 2023, 98, 240–246. [Google Scholar] [CrossRef]
- Bose, B.K. Power Electronics and Motor Drives; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Rosato, M.A. Small Wind Turbines for Electricity and Irrigation; CRC Press/Taylor & Francis Group: Boca Raton, FL, USA, 2019. [Google Scholar]
- Hau, E. Wind Turbines: Fundamentals, Technologies, Applications, Economics; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Blades | 3 |
| Radio | 37.5 cm |
| Effective Radio (after removing the central area of the turbine, not affected by the wind) | 36.2 cm |
| Longitude | 60 cm |
| R’ (internal phase resistance of the generator) | 9.56 Ω |
| L’ (internal phase inductance of the generator) | 20.96 mH |
| (Flux created by the magnets at the rotor) | 0.2665 Wb |
| Pole-Pairs of the stator windings | 6 |
| Length | 0.625 m |
| Diameter | 0.815 m |
| Thickness | 0.003 m |
| Savonius | Archimedes Spiral with Enclosure (Ayanz Wind Turbine Based on Screw Blades) | Darrieus (and Variants) | Tri-Bladed Horizontal Axis | |
|---|---|---|---|---|
| Cp max | −− | − | + | ++ |
| Start up and operation at low wind speeds | + | + | − | − |
| Rotation speeds | ++ | + | − | −− |
| Noise reduction (due to rotation speeds) | + | + | − | −− |
| Mechanical stress reduction (due to rotation speeds) | + | + | − | −− |
| Capacity to operate at variable winds (gusty winds) | + | + | + | − |
| Capacity to orientate to winds that change directions regularly (stormy days) | ++ | − | ++ | − |
| Easy to construct | + | − | − | − |
| Prevention of bird deaths and safety in case of destructive failure | − | ++ | − | − |
| Minimizes the fact of watching the blades rotating | − | ++ | − | − |
| Speed Reference to the Wind Maker | THD (Total Harmonic Distortion) | |||
|---|---|---|---|---|
| 20 Hz | 22.5 Hz | 25 Hz | 27.5 Hz | |
| With L | 20.85% | 13.73% | 9% | 6.55% |
| Without L | 69.10% | 47.67% | 39.23% | 33.74% |
| COMPONENTS | 12 V Board | 24 V Board | 36 V Board |
|---|---|---|---|
| Rd1 | 56 KΩ | 56 KΩ | 82 KΩ |
| Rd2 | 56 KΩ | 56 KΩ | 82 KΩ |
| Three-phase rectifier | DBI20-08B | DBI20-08B | DBI20-08B |
| Cest1, Cest2, and Cest3 | 100 nF | 100 nF | 100 nF |
| R1 | 600 Ω | 1.8 KΩ | 2.67 KΩ |
| R2 | 120 Ω | 18 2Ω | 237 Ω |
| Zener | 5.1 V | 12 V | 18 V |
| Rs1 | 6.8 KΩ | 22 KΩ | 22.6 K Ω |
| Rs2 | 390 KΩ × 2 (2 in series configuration) | 820 KΩ | 1.3 MΩ |
| Rs3 | 1 KΩ | 1.5 KΩ | 1.62 KΩ |
| Rs4 | 2.7 KΩ × 2 (2 in parallel configuration) | 62 KΩ | 105 KΩ |
| Dsc1, Dsc2 | 1N4148 | 1N4148 | 1N4148 |
| Dbus1 and Dbus2 | 1N4148 | 1N4148 | 1N4148 |
| Rbus | 56 KΩ | 120 KΩ | 174 KΩ |
| O1 and 02 (same chip with both comparators) | TLC3702CP | LM393P | LT1018CN8#PBF |
| O3 | TLC271Cp | TL082IP | TL082IP |
| Rg | 120 KΩ | 470 KΩ | 1.07 MΩ |
| Rp | 100 KΩ | 100 KΩ | 100 KΩ |
| T1 | BC 337-40 | BC 337-40 | BC 337-40 |
| Dcoil | 1N4148 | 1N4148 | 1N4148 |
| Fuse | 0217005.MXP | 0217005.MXP | 0217005.MXP |
| Fuse holder | MC000827 | MC000827 | MC000827 |
| Relay | 12 V HF140FF/012-2ZTF | 24 V 800-4454 | 36 V 653-G2R-24-DC3 |
| Cdc | 2200 µF | 2200 µF | 2200 µF |
| 12 V Board | 24 V Board | 36 V Board | |
|---|---|---|---|
| b | 1.0339 W | 0.8055 W | 0.866 W |
| Approximated cost | 18.873 € | 20.022 € | 30.2231 € |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arzuaga, A.; Estivariz, A.; Fernández, O.; Gubía, K.; Plaza, A.; Abad, G.; Cabezuelo Romero, D. Low-Cost Maximum Power Point Tracking Strategy and Protection Circuit Applied to an Ayanz Wind Turbine with Screw Blades. Energies 2023, 16, 6204. https://doi.org/10.3390/en16176204
Arzuaga A, Estivariz A, Fernández O, Gubía K, Plaza A, Abad G, Cabezuelo Romero D. Low-Cost Maximum Power Point Tracking Strategy and Protection Circuit Applied to an Ayanz Wind Turbine with Screw Blades. Energies. 2023; 16(17):6204. https://doi.org/10.3390/en16176204
Chicago/Turabian StyleArzuaga, Aitor, Asier Estivariz, Oihan Fernández, Kristian Gubía, Ander Plaza, Gonzalo Abad, and David Cabezuelo Romero. 2023. "Low-Cost Maximum Power Point Tracking Strategy and Protection Circuit Applied to an Ayanz Wind Turbine with Screw Blades" Energies 16, no. 17: 6204. https://doi.org/10.3390/en16176204