

Estimating Energy Consumption of Battery Electric Vehicles Using Vehicle Sensor Data and Machine Learning Approaches
 ,
,
Abstract
:1. Introduction
2. Experimental Procedure
2.1. Vehicle Specifications
2.2. Route Modes
2.3. Data Collection Devices
2.4. Determination of Energy Consumption and Emissions
3. Machine Learning Method
3.1. Data Collection and Preprocessing
3.2. Machine Learning Algorithms and Model Evaluation
4. Results and Discussion
4.1. Real-World Energy Consumption
4.2. Input Features
4.3. Model Selection
4.4. Feature Importance
5. Conclusions
- The average energy consumption of the BEVs was found to be 159.90 Wh/km for the urban mode and 132.24 Wh/km for the rural mode, while the overall average consumption was 148.03 Wh/km.
- There was a difference of approximately 21% in the average energy consumption between driving on urban and rural routes.
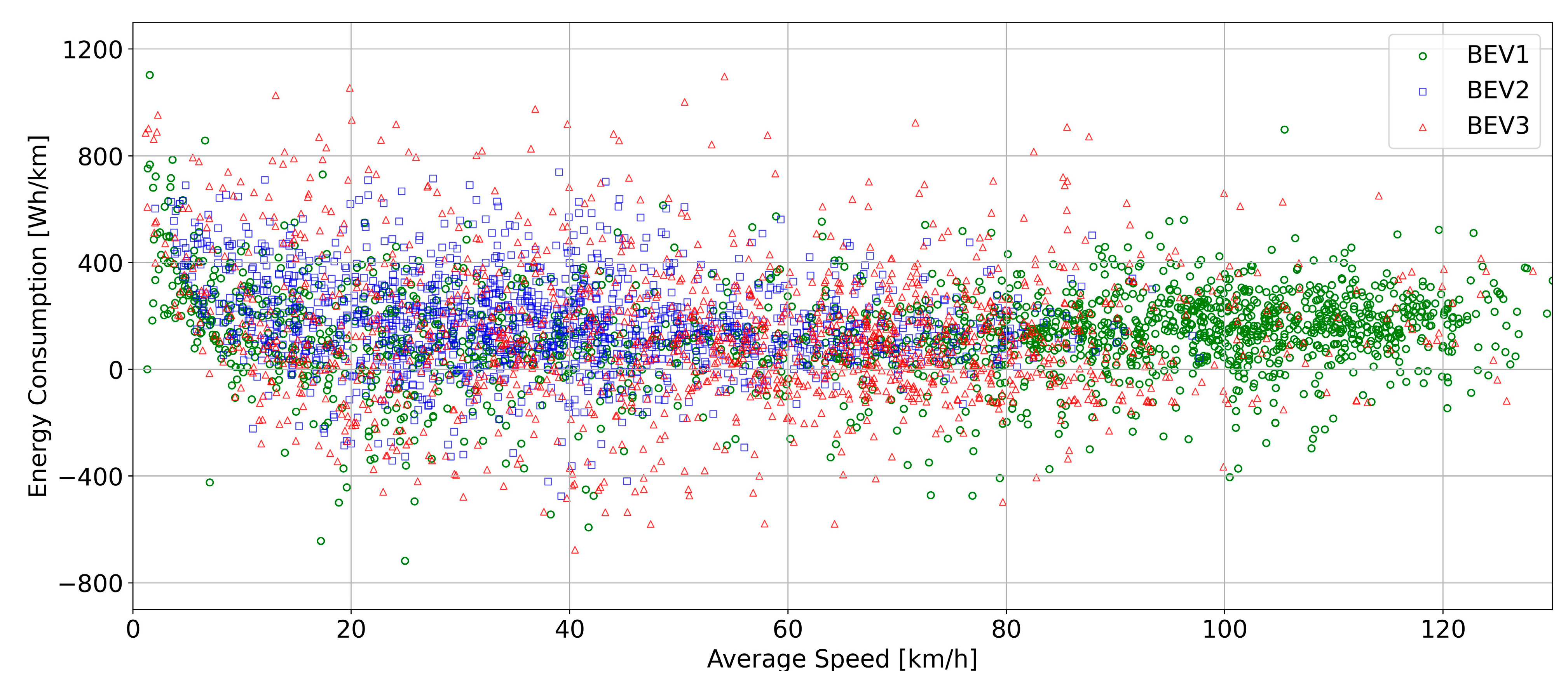
- The BEVs showed higher energy consumption rates in the speed range below 30 km/h.
- The energy consumption of the BEVs has higher fluctuations in the urban route mode.
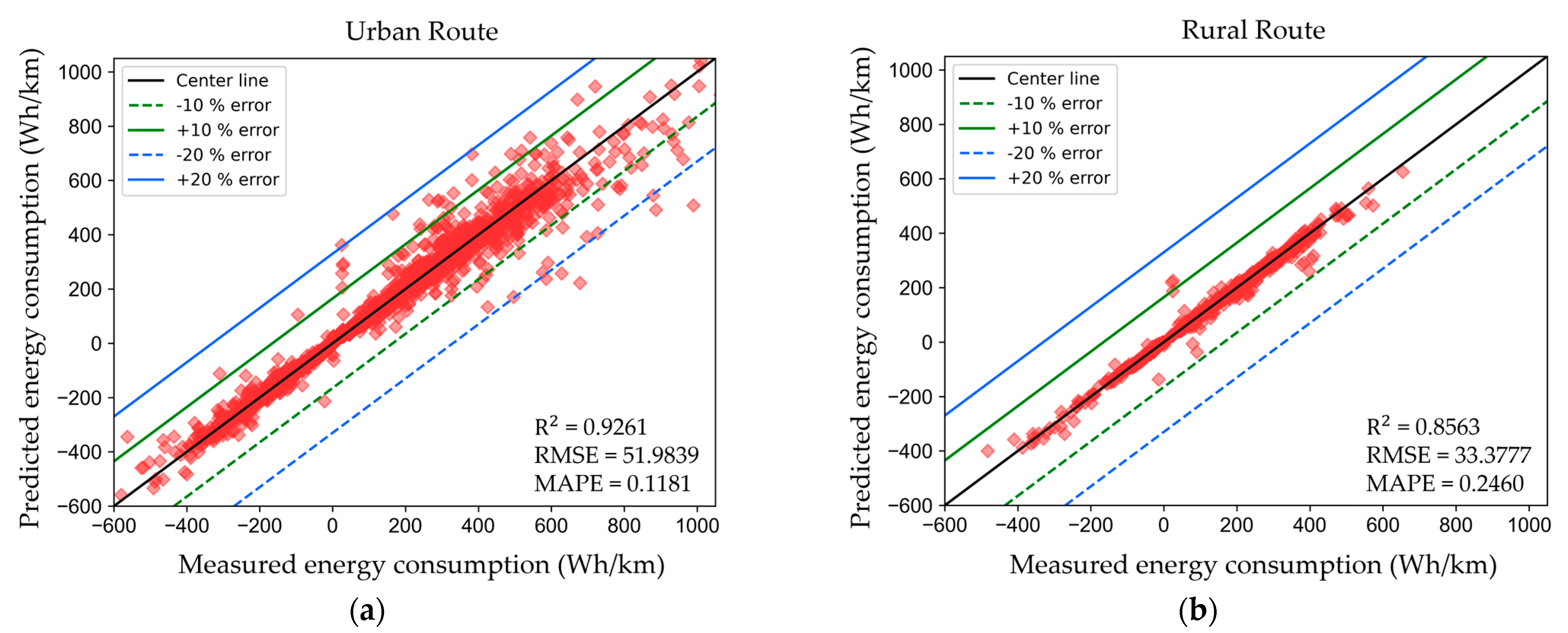
- The RF algorithm demonstrated the best performance in terms of accuracy and run time, with MAPE scores of 11.81 and 24.60% for urban and rural routes, respectively.
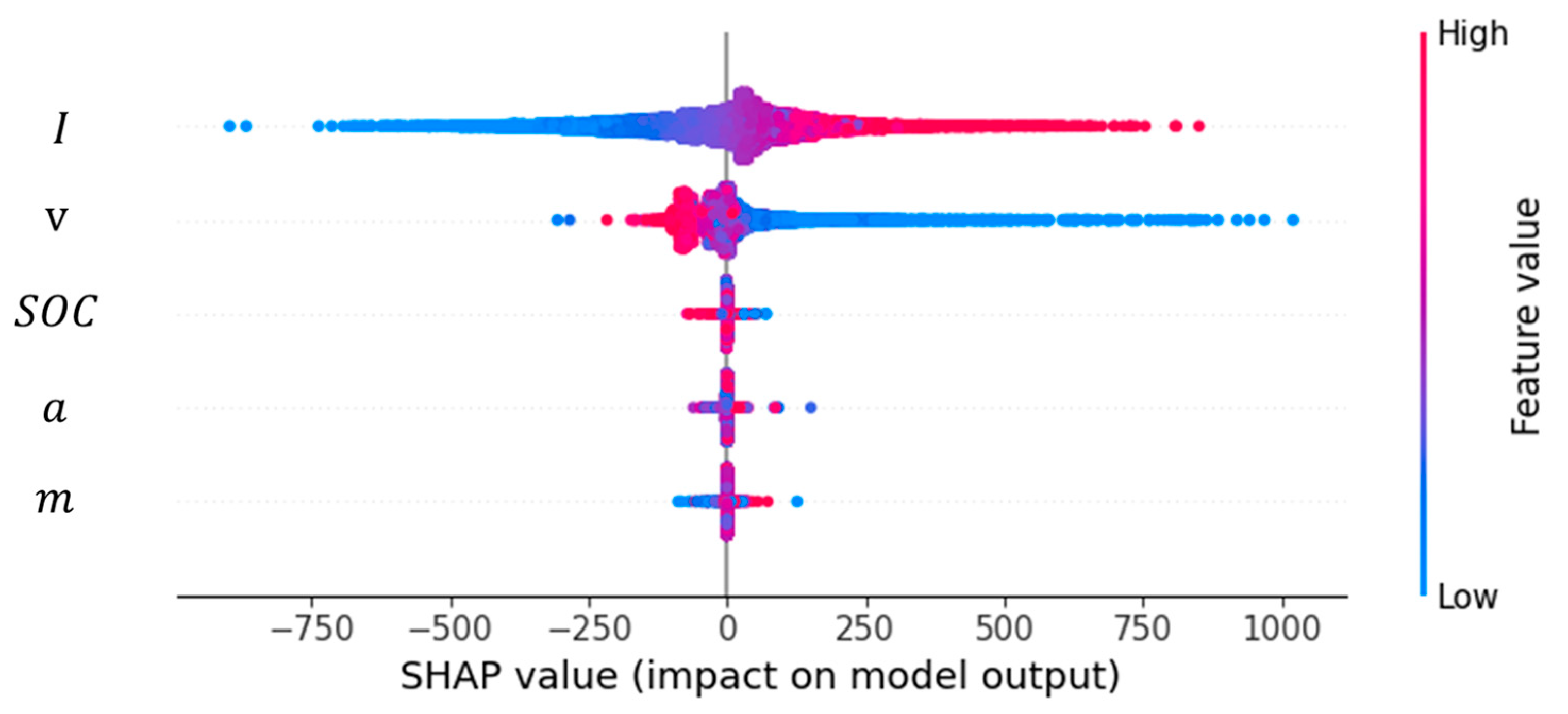
- The factors that have an impact on the energy consumption, in descending order, were found to be battery current, speed, state of charge, acceleration, and road slope.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Energy Agency (IEA). Greenhouse Gas Emissions from Energy Data Explorer. Available online: https://www.iea.org/data-and-statistics/data-tools/greenhouse-gas-emissions-from-energy-data-explorer (accessed on 10 November 2021).
- European Commission (EC). European Green Deal: Commission Proposes Transformation of EU Economy and Society to Meet Climate Ambitions. Available online: https://ec.europa.eu/commission/presscorner/detail/en/IP_21_3541 (accessed on 14 July 2021).
- Szaruga, E.; Załoga, E. Qualitative–Quantitative Warning Modeling of Energy Consumption Processes in Inland Waterway Freight Transport on River Sections for Environmental Management. Energies 2022, 15, 4660. [Google Scholar] [CrossRef]
- Kłos-Adamkiewicz, Z.; Szaruga, E.; Gozdek, A.; Kogut-Jaworska, M. Links between the Energy Intensity of Public Urban Transport, Regional Economic Growth and Urbanisation: The Case of Poland. Energies 2023, 16, 3799. [Google Scholar] [CrossRef]
- International Energy Agency (IEA). Global Energy Review: CO2 Emissions in 2021. Available online: https://www.iea.org/reports/global-energy-review-co2-emissions-in-2021-2 (accessed on 8 March 2022).
- Chaichana, C.; Wongsapai, W.; Damrongsak, D.; Ishihara, K.N.; Luangchosiri, N. Promoting community renewable energy as a tool for sustainable development in rural areas of Thailand. Energy Procedia 2017, 141, 114–118. [Google Scholar] [CrossRef]
- Mona, Y.; Do, T.A.; Sekine, C.; Suttakul, P.; Chaichana, C. Geothermal electricity generator using thermoelectric module for IoT monitoring. Energy Rep. 2022, 8, 347–352. [Google Scholar] [CrossRef]
- Gersdorf, T.; Hensley, R.; Hertzke, P.; Schaufuss, P. Electric Mobility after the Crisis: Why an Auto Slowdown Won’t Hurt EV Demand. McKinsey & Company. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights (accessed on 16 September 2020).
- Ayetor, G.K.; Opoku, R.; Sekyere, C.K.; Agyei-Agyeman, A.; Deyegbe, G.R. The cost of a transition to electric vehicles in Africa: A case study of Ghana. Case Stud. Transp. Policy 2022, 10, 388–395. [Google Scholar] [CrossRef]
- Donkers, A.; Yang, D.; Viktorović, M. Influence of driving style, infrastructure, weather and traffic on electric vehicle performance. Transp. Res. Part D Transp. Environ. 2020, 88, 102569. [Google Scholar] [CrossRef]
- Degen, F.; Schütte, M. Life cycle assessment of the energy consumption and GHG emissions of state-of-the-art automotive battery cell production. J. Clean. Prod. 2022, 330, 129798. [Google Scholar] [CrossRef]
- Suttakul, P.; Wongsapai, W.; Fongsamootr, T.; Mona, Y.; Poolsawat, K. Total cost of ownership of internal combustion engine and electric vehicles: A real-world comparison for the case of Thailand. Energy Rep. 2022, 8, 545–553. [Google Scholar] [CrossRef]
- Wei, H.; He, C.; Li, J.; Zhao, L. Online estimation of driving range for battery electric vehicles based on SOC-segmented actual driving cycle. J. Energy Storage 2022, 49, 104091. [Google Scholar] [CrossRef]
- Suttakul, P.; Fongsamootr, T.; Wongsapai, W.; Mona, Y.; Poolsawat, K. Energy consumptions and CO2 emissions of different powertrains under real-world driving with various route characteristics. Energy Rep. 2022, 8, 554–561. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, F.; Ke, X.; Liu, Z.; Yuan, C. Predictive modeling of energy consumption and greenhouse gas emissions from autonomous electric vehicle operations. Appl. Energy 2019, 254, 113597. [Google Scholar] [CrossRef]
- Achariyaviriya, W.; Suttakul, P.; Fongsamootr, T.; Mona, Y.; Phuphisith, S.; Tippayawong, K.Y. The social cost of carbon of different automotive powertrains: A comparative case study of Thailand. Energy Rep. 2023, 9, 1144–1151. [Google Scholar] [CrossRef]
- Pignatta, G.; Balazadeh, N. Hybrid Vehicles as a Transition for Full E-Mobility Achievement in Positive Energy Districts: A Comparative Assessment of Real-Driving Emissions. Energies 2022, 15, 2760. [Google Scholar] [CrossRef]
- Achariyaviriya, W.; Hayashi, Y.; Takeshita, H.; Kii, M.; Vichiensan, V.; Theeramunkong, T. Can Space–Time Shifting of Activities and Travels Mitigate Hyper-Congestion in an Emerging Megacity, Bangkok? Effects on Quality of Life and CO2 Emission. Sustainability 2021, 13, 6547. [Google Scholar] [CrossRef]
- Kantavat, P.; Kijsirikul, B.; Iwahori, Y.; Hayashi, Y.; Panboonyuen, T.; Vateekul, P.; Achariyaviriya, W. Transportation Mobility Factor Extraction Using Image Recognition Techniques. In Proceedings of the 2019 First International Conference on Smart Technology & Urban Development (STUD), Chiang Mai, Thailand, 13–14 December 2019; pp. 1–7. [Google Scholar]
- Kasemset, C.; Boonmee, C.; Arakawa, M. Traffic Information Sign Location Problem: Optimization and Simulation. Ind. Eng. Manag. Syst. 2020, 19, 228–241. [Google Scholar] [CrossRef]
- Kasemset, C.; Suto, H. A case study of outbound-vehicle analysis in traffic system: Optimization to simulation. In Proceedings of the 2019 IEEE 6th International Conference on Industrial Engineering and Applications (ICIEA), Tokyo, Japan, 12–15 April 2019; pp. 775–779. [Google Scholar]
- Zhang, Q.; Tian, S. Energy Consumption Prediction and Control Algorithm for Hybrid Electric Vehicles Based on an Equivalent Minimum Fuel Consumption Model. Sustainability 2023, 15, 9394. [Google Scholar] [CrossRef]
- Katongtung, T.; Onsree, T.; Tippayawong, N. Machine learning prediction of biocrude yields and higher heating values from hydrothermal liquefaction of wet biomass and wastes. Bioresour. Technol. 2022, 344, 126278. [Google Scholar] [CrossRef]
- Rivera-Campoverde, N.D.; Muñoz-Sanz, J.L.; Arenas-Ramirez, B.d.V. Estimation of pollutant emissions in real driving conditions based on data from OBD and machine learning. Sensors 2021, 21, 6344. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, X.; Liu, C.; Rong, J.; Zhang, Y.; Dong, Z.; Su, Y. Vehicle fuel consumption prediction method based on driving behavior data collected from smartphones. J. Adv. Transp. 2020, 2020, 9263605. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Sanchez-Diaz, I. Electric vehicle routing problem with machine learning for energy prediction. Transp. Res. Part B Methodol. 2021, 145, 24–55. [Google Scholar] [CrossRef]
- Prati, M.V.; Costagliola, M.A.; Giuzio, R.; Corsetti, C.; Beatrice, C. Emissions and energy consumption of a plug-in hybrid passenger car in Real Driving Emission (RDE) test. Transp. Eng. 2021, 4, 100069. [Google Scholar] [CrossRef]
- Hien, N.L.H.; Kor, A.-L. Analysis and Prediction Model of Fuel Consumption and Carbon Dioxide Emissions of Light-Duty Vehicles. Appl. Sci. 2022, 12, 803. [Google Scholar] [CrossRef]
- Frey, H.C.; Zheng, X.; Hu, J. Variability in measured real-world operational energy use and emission rates of a plug-in hybrid electric vehicle. Energies 2020, 13, 1140. [Google Scholar] [CrossRef]
- Al-Wreikat, Y.; Serrano, C.; Sodré, J.R. Driving behaviour and trip condition effects on the energy consumption of an electric vehicle under real-world driving. Appl. Energy 2021, 297, 117096. [Google Scholar] [CrossRef]
- Thailand Greenhouse Gas Management Organization (TGO). Emission Factor and Carbon Footprint of Products. Available online: http://thaicarbonlabel.tgo.or.th/index.php?lang=TH&mod=Y0hKdlpIVmpkSE5mWlcxcGMzTnBiMjQ9 (accessed on 12 October 2022).
- Zhang, H.; Yang, S.; Guo, L.; Zhao, Y.; Shao, F.; Chen, F. Comparisons of isomiR patterns and classification performance using the rank-based MANOVA and 10-fold cross-validation. Gene 2015, 569, 21–26. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, K.; Yamamoto, T.; Al Mamlook, R.E.; Jamal, A. A comparative performance of machine learning algorithm to predict electric vehicles energy consumption: A path towards sustainability. Energy Environ. 2022, 33, 1583–1612. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, K.; Yamamoto, T.; Zahid, M.; Jamal, A. Modeling of machine learning with SHAP approach for electric vehicle charging station choice behavior prediction. Travel Behav. Soc. 2023, 31, 78–92. [Google Scholar] [CrossRef]
- Fetene, G.M.; Kaplan, S.; Mabit, S.L.; Jensen, A.F.; Prato, C.G. Harnessing big data for estimating the energy consumption and driving range of electric vehicles. Transp. Res. Part D Transp. Environ. 2017, 54, 1–11. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Details | BEV1 | BEV2 | BEV3 |
|---|---|---|---|
| Body type | SUV | SUV | C segment |
| Model year | 2019 | 2020 | 2018 |
| Electric motor | Permanent-magnet synchronous | Permanent-magnet synchronous | Alternating current synchronous |
| Motor power (kW) | 110 | 102 | 110 |
| Battery type | Lithium iron | Lithium iron | Lithium iron |
| Battery capacity (Wh) | 44.50 | 47.79 | 40.00 |
| Curb weight (kg) | 1535 | 1510 | 1580 |
| Feature | Unit | Range | Mean | SD |
|---|---|---|---|---|
| Speed () | km/h | 1.00, 138.61 | 53.2915 | 32.2183 |
| Acceleration () | m/s2 | −5.79, 15.99 | 0.0508 | 0.6404 |
| Road slope () | % | −69.85, 69.98 | 0.0611 | 10.8670 |
| Battery current () | A | −246.20, 335.10 | 11.0517 | 43.0538 |
| State of charge () | % | 13.20, 97.97 | 50.4685 | 22.2618 |
| ML Algorithm | Route Mode | RMSE | MAPE | Run Time (Second) | |
|---|---|---|---|---|---|
| XGB | Urban | 0.9136 (0.0171) | 54.6055 (6.0350) | 0.4373 (0.2266) | 57.0548 |
| Rural | 0.8380 (0.0211) | 34.6301 (2.4754) | 0.4180 (0.2330) | 45.1028 | |
| RF | Urban | 0.9261 (0.0113) | 51.9839 (4.5549) | 0.1181 (0.0049) | 56.7060 |
| Rural | 0.8563 (0.0222) | 33.2777 (2.8756) | 0.2460 (0.1334) | 48.6161 | |
| MLP | Urban | 0.9221 (0.0209) | 53.3689 (7.7778) | 0.2448 (0.0642) | 203.1225 |
| Rural | 0.8400 (0.0168) | 35.0335 (2.0151) | 0.3015 (0.1016) | 120.4364 | |
| SVR | Urban | 0.3289 (0.0806) | 109.3919 (7.2751) | 1.2344 (0.4907) | 318.6580 |
| Rural | 0.6994 (0.0356) | 42.4560 (2.8301) | 0.2441 (0.0794) | 218.8431 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Achariyaviriya, W.; Wongsapai, W.; Janpoom, K.; Katongtung, T.; Mona, Y.; Tippayawong, N.; Suttakul, P. Estimating Energy Consumption of Battery Electric Vehicles Using Vehicle Sensor Data and Machine Learning Approaches. Energies 2023, 16, 6351. https://doi.org/10.3390/en16176351
Achariyaviriya W, Wongsapai W, Janpoom K, Katongtung T, Mona Y, Tippayawong N, Suttakul P. Estimating Energy Consumption of Battery Electric Vehicles Using Vehicle Sensor Data and Machine Learning Approaches. Energies. 2023; 16(17):6351. https://doi.org/10.3390/en16176351
Chicago/Turabian StyleAchariyaviriya, Witsarut, Wongkot Wongsapai, Kittitat Janpoom, Tossapon Katongtung, Yuttana Mona, Nakorn Tippayawong, and Pana Suttakul. 2023. "Estimating Energy Consumption of Battery Electric Vehicles Using Vehicle Sensor Data and Machine Learning Approaches" Energies 16, no. 17: 6351. https://doi.org/10.3390/en16176351