
Performance Enhancement of an Islanded Microgrid with the Support of Electrical Vehicle and STATCOM Systems

 , ,
, ,  , and
, and
Abstract
:1. Introduction
2. System under Study
2.1. Diesel Generator Model
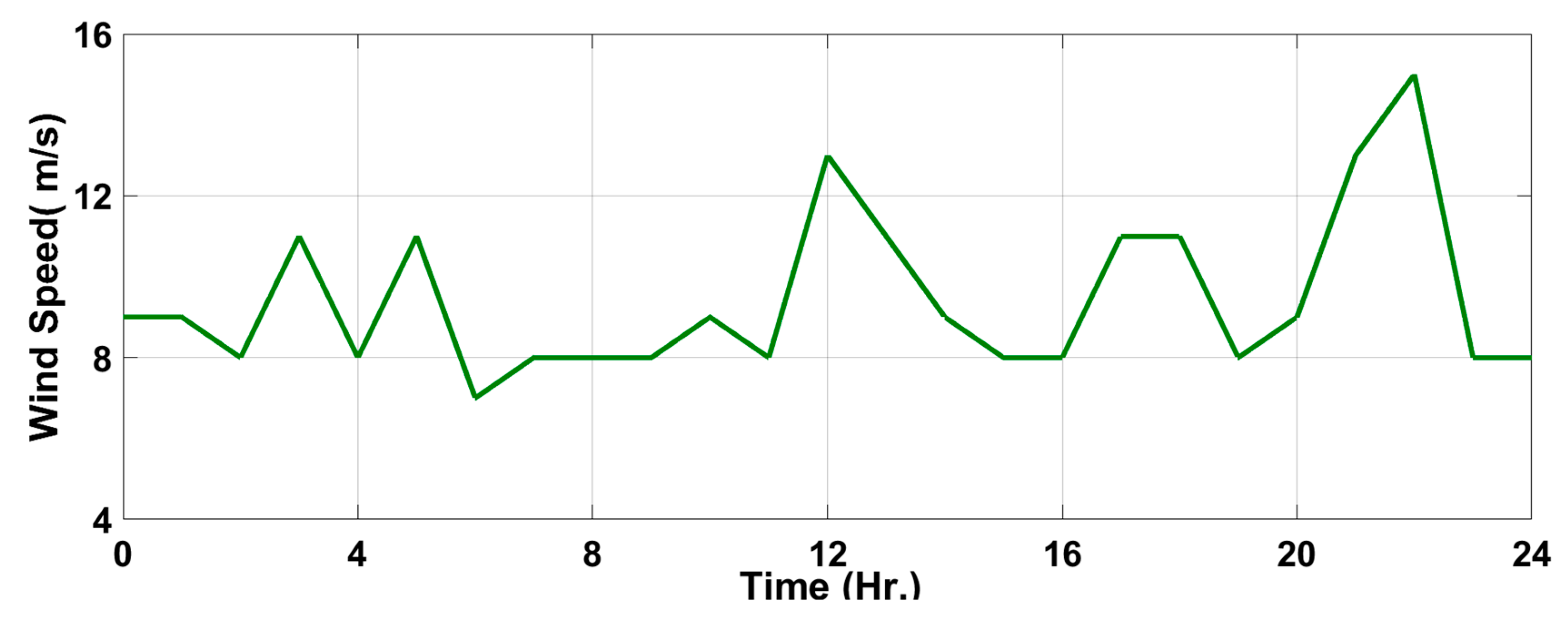
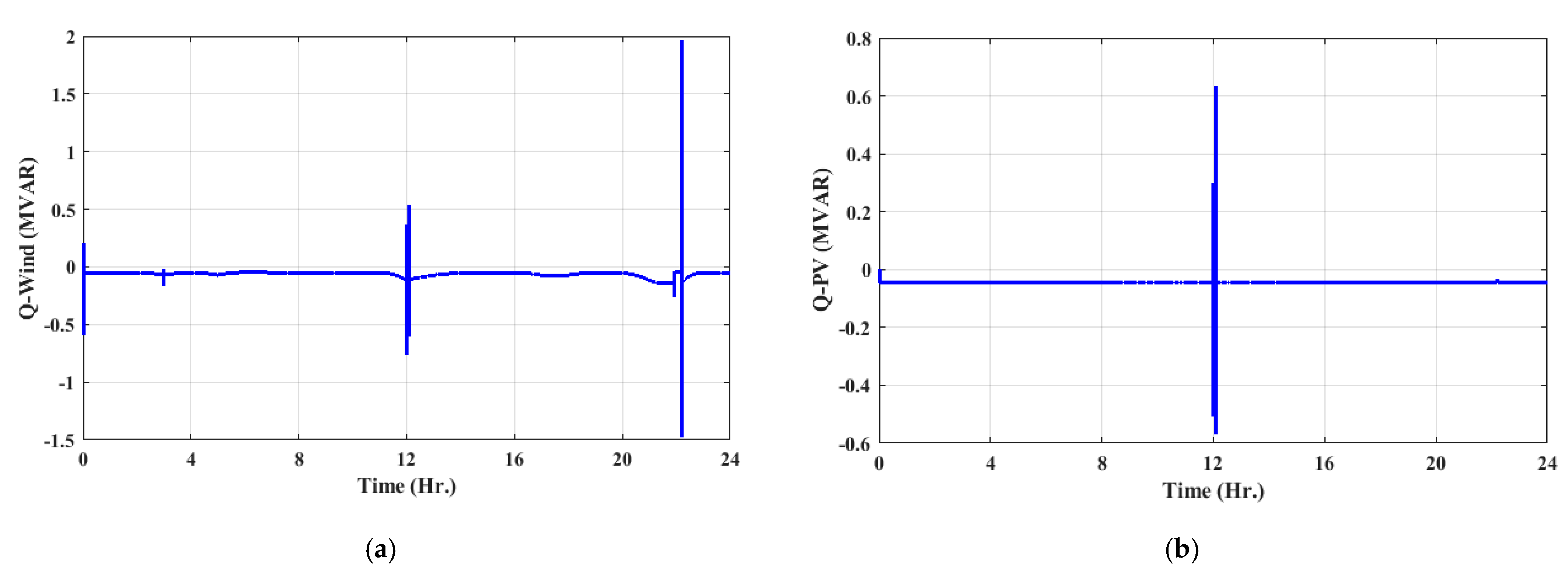
2.2. Modelling of Wind Turbine System
2.3. Solar Energy Model
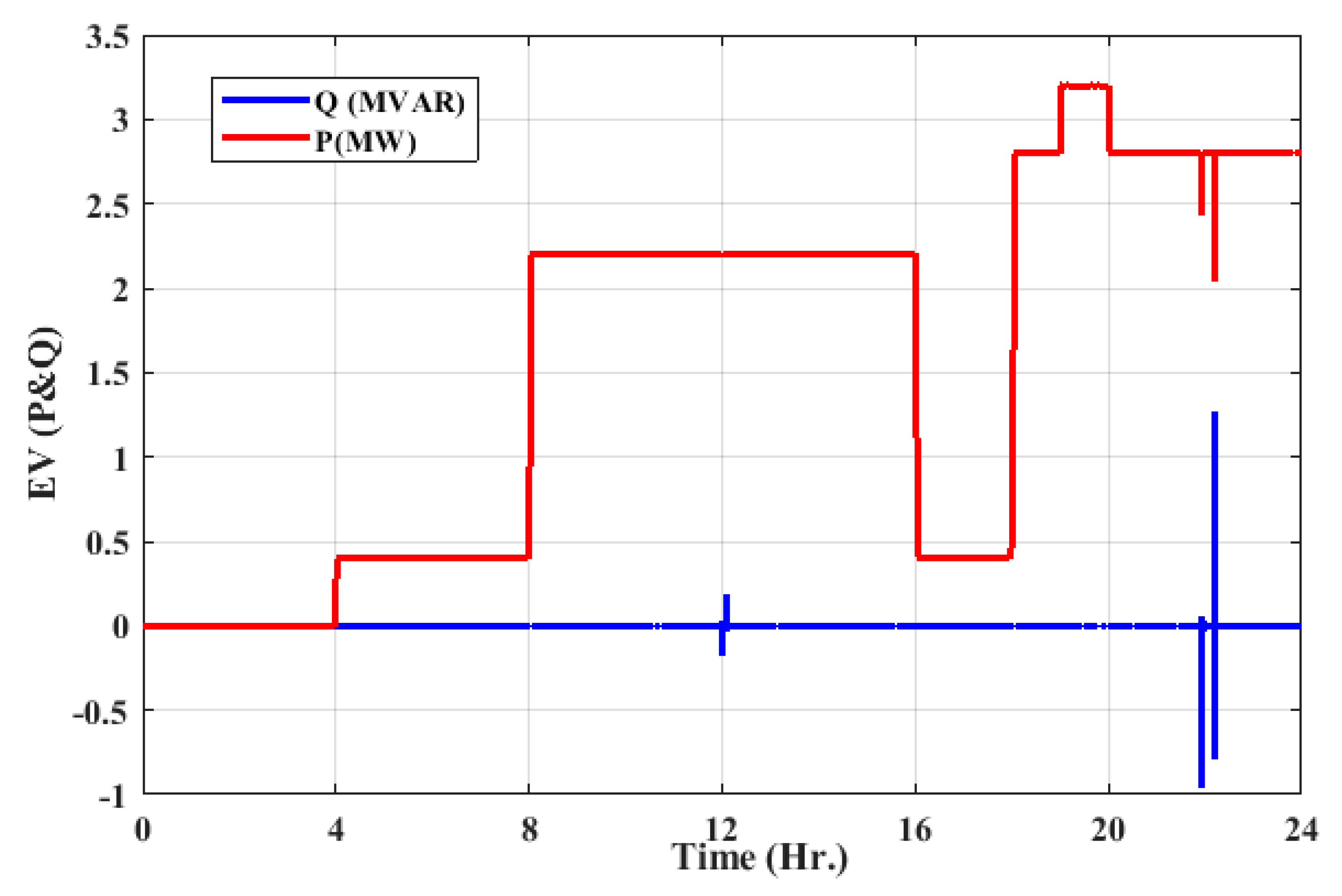
2.4. Electrical Vehicle Model
3. Microgrid Stability
4. Application of FACTS in Microgrids
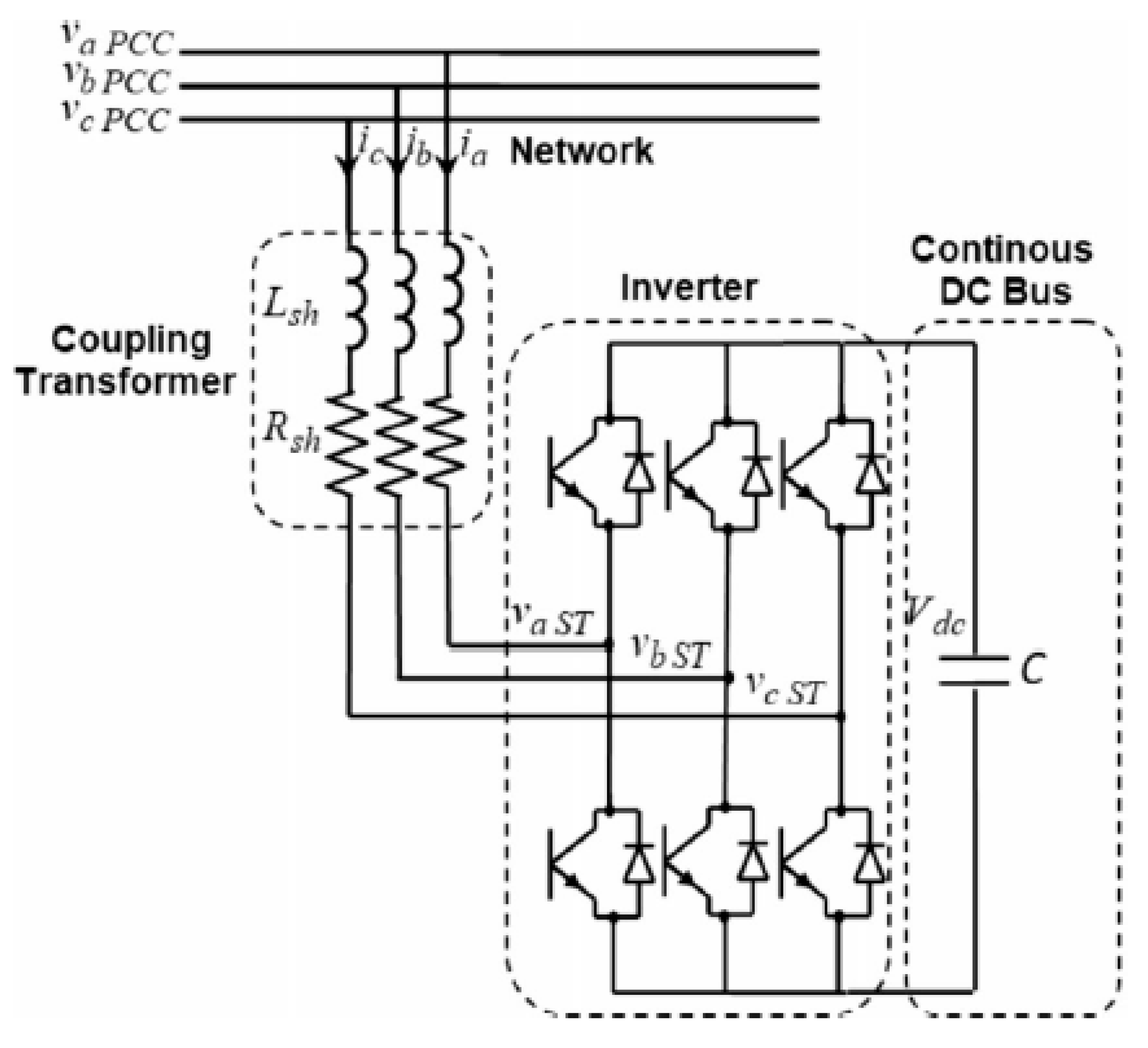
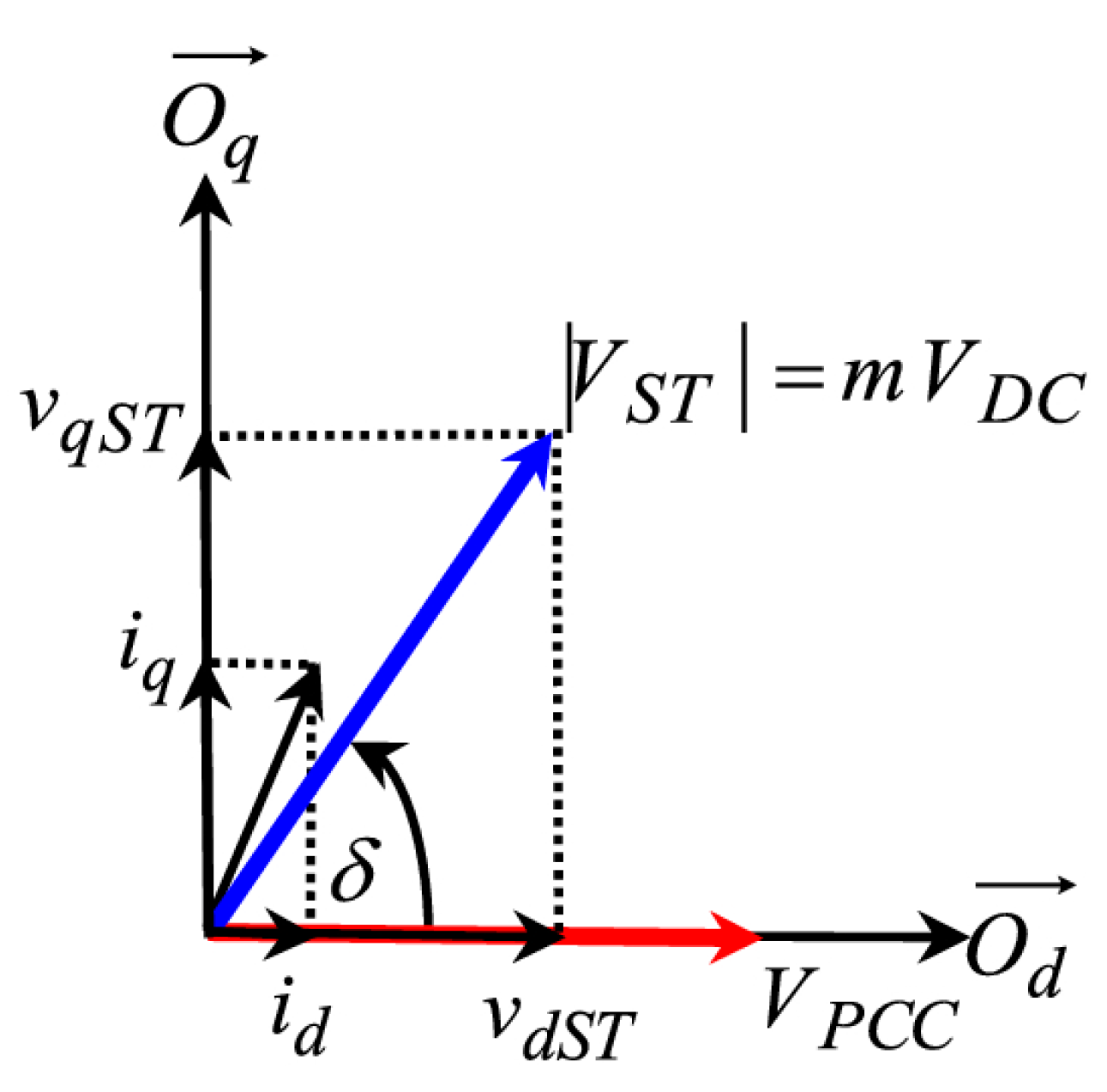
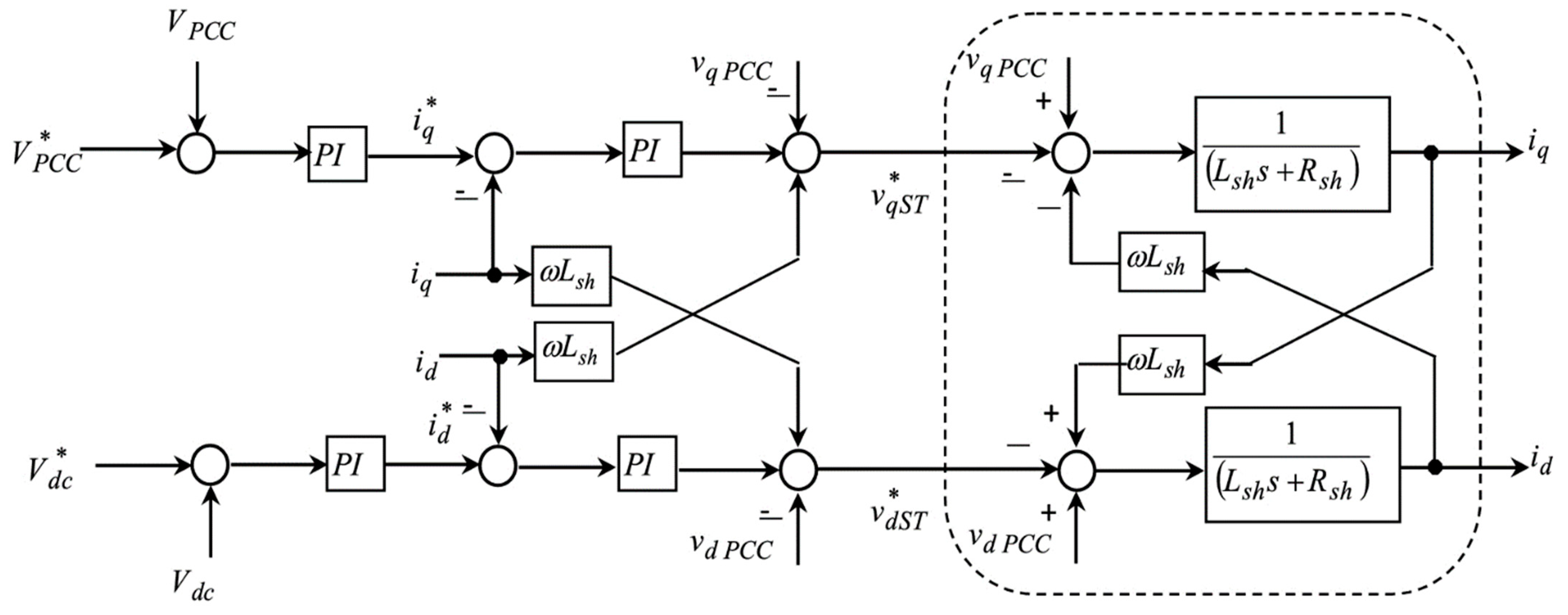
Modelling of DSTATCOM
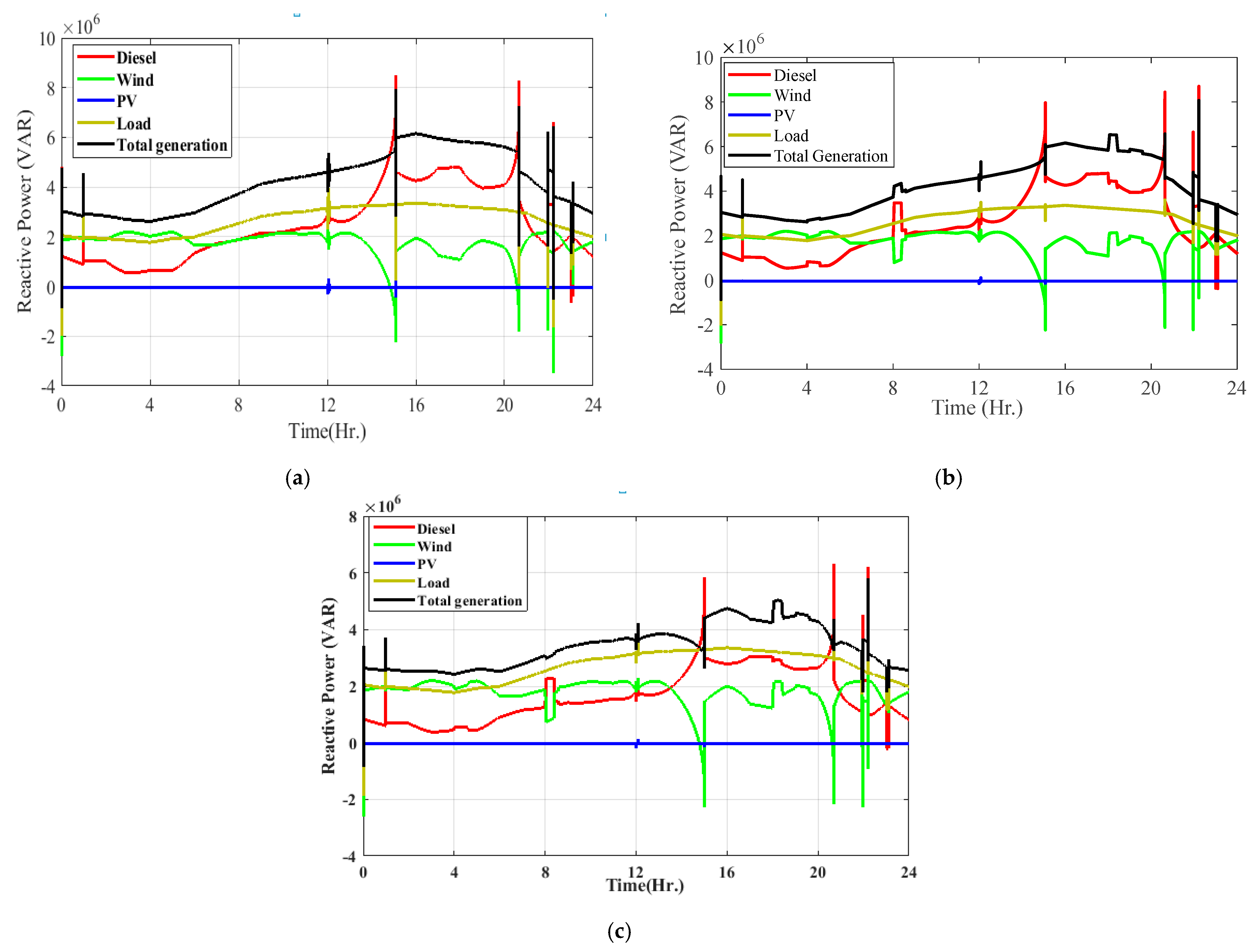
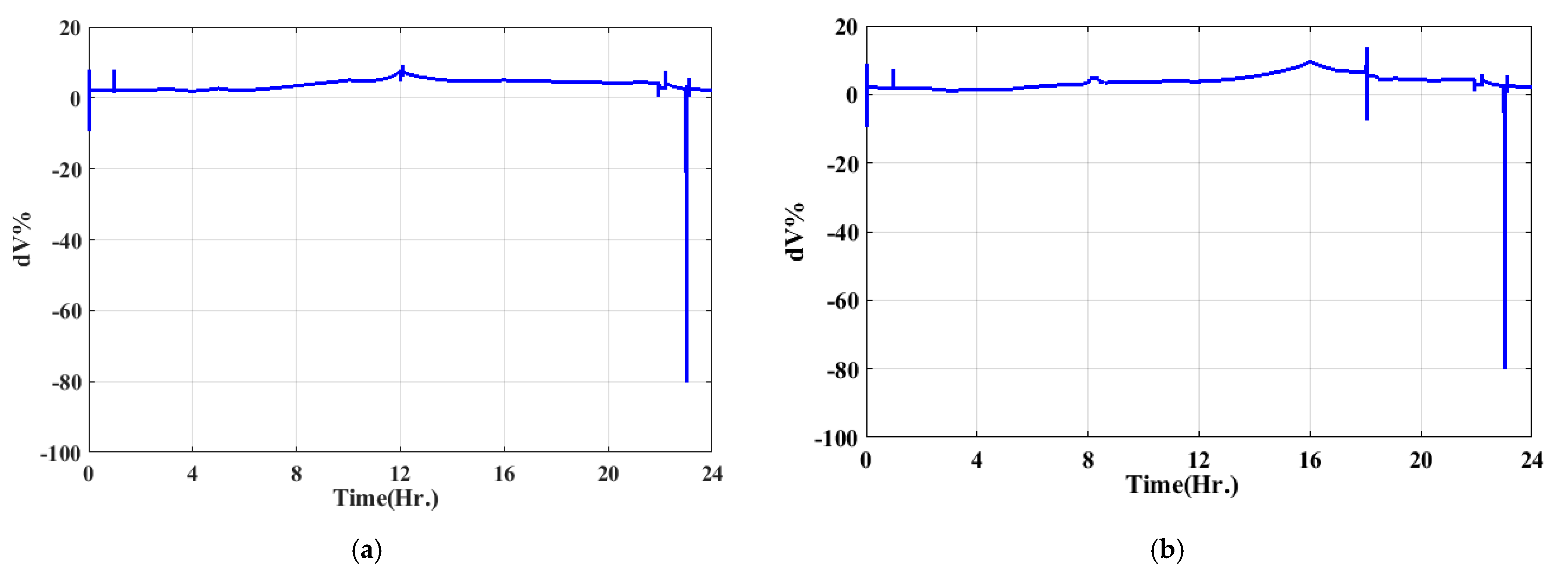
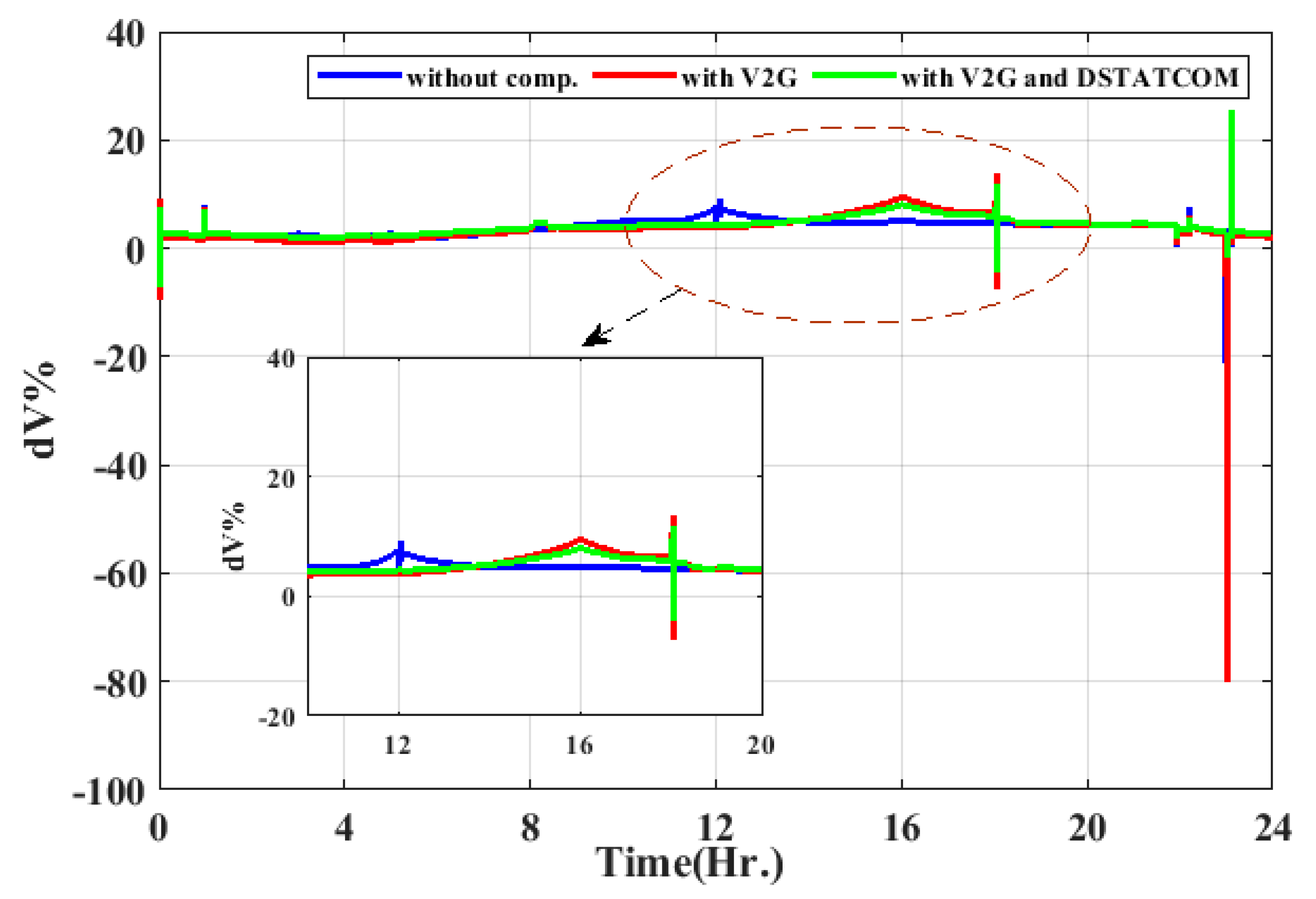
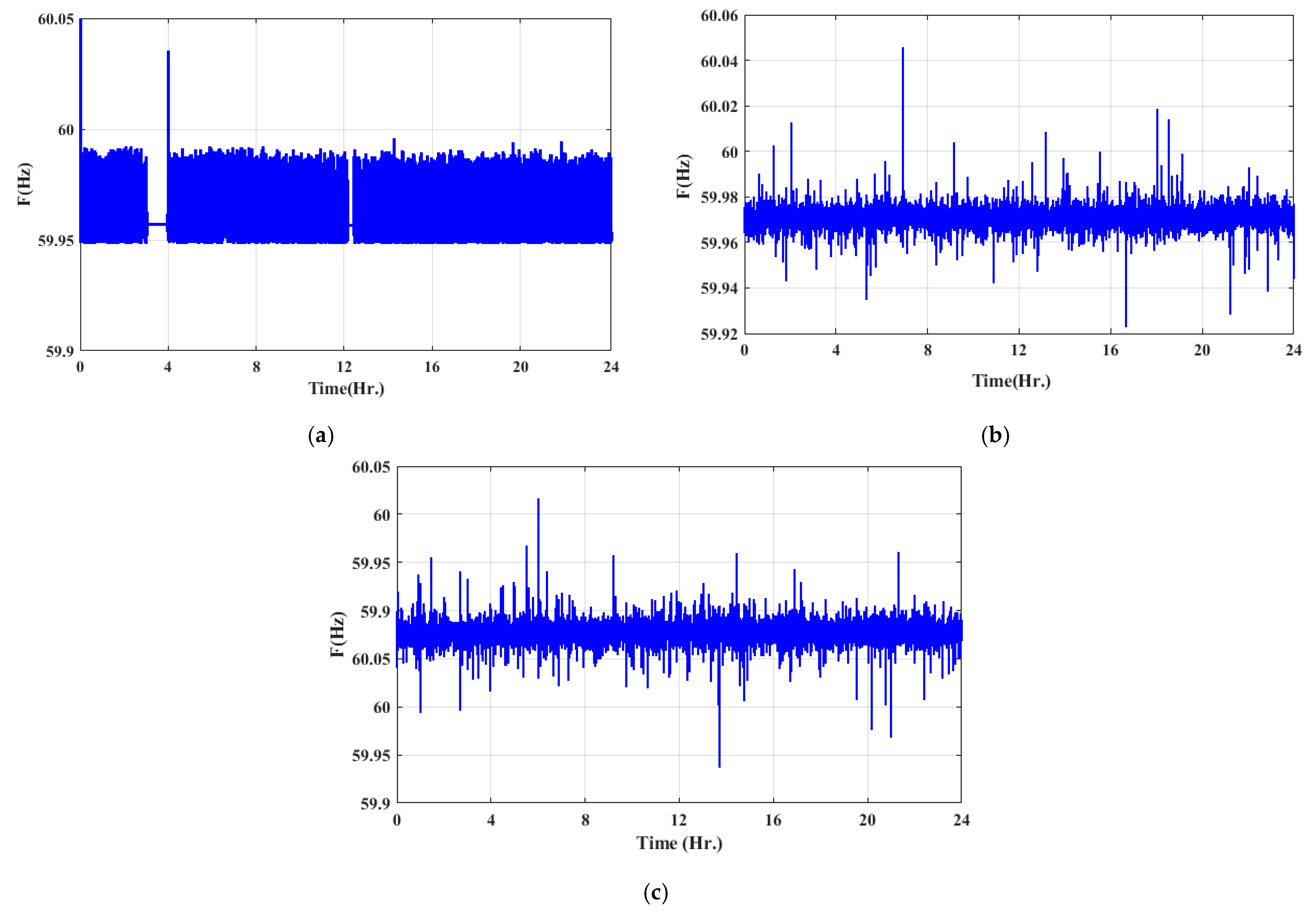
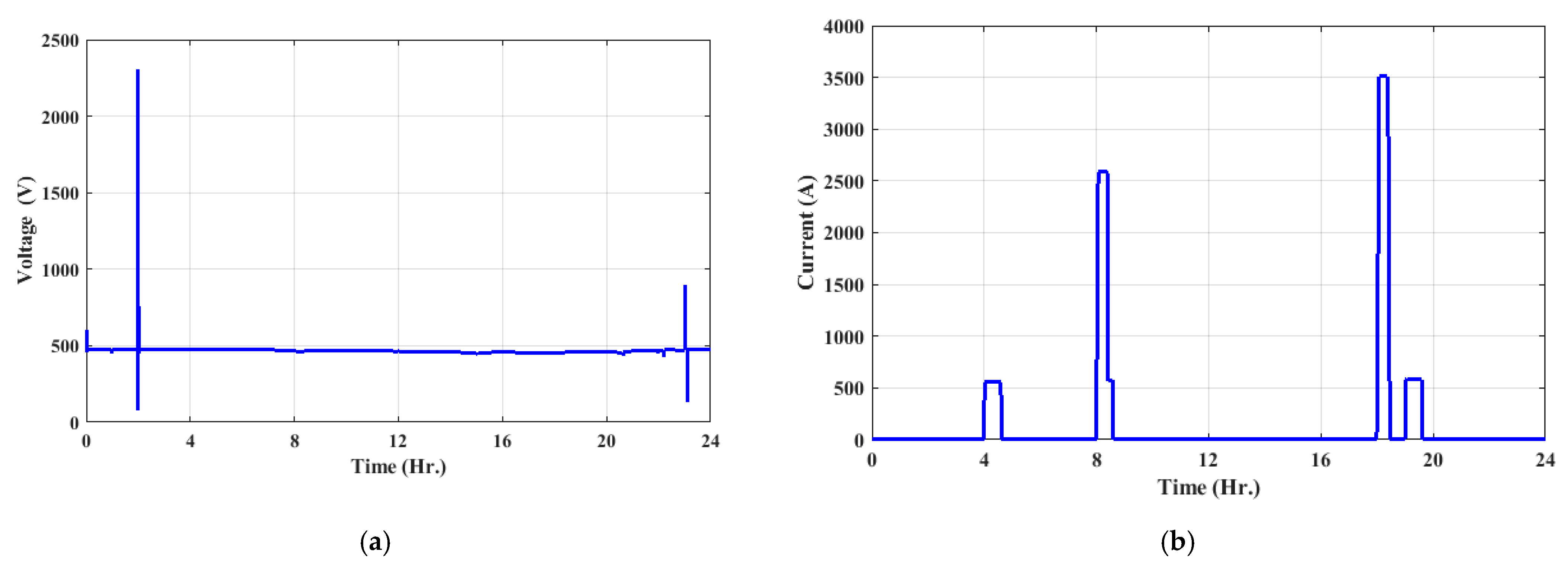
5. Results and Discussion
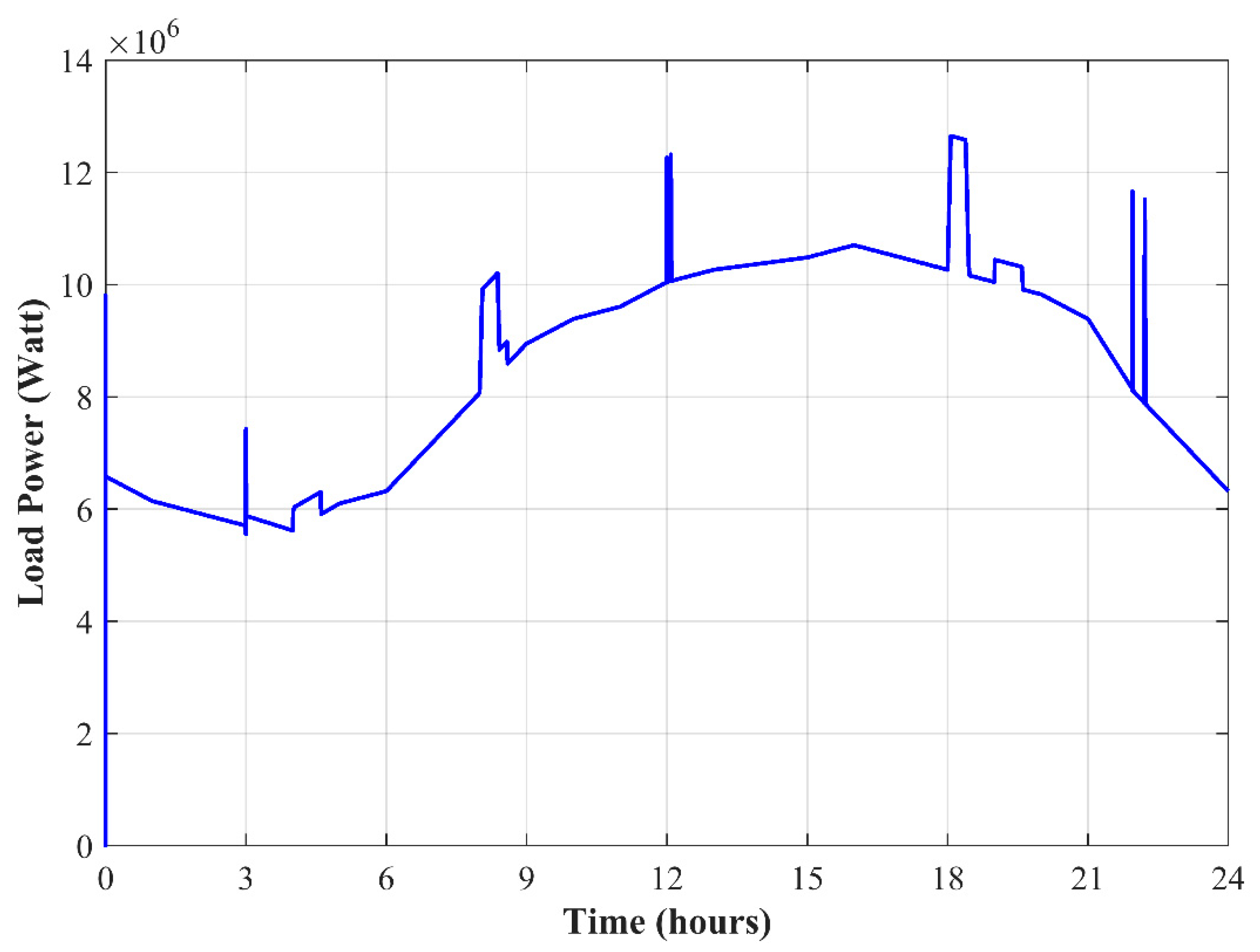
- At the third hour, the asynchronous machine works.
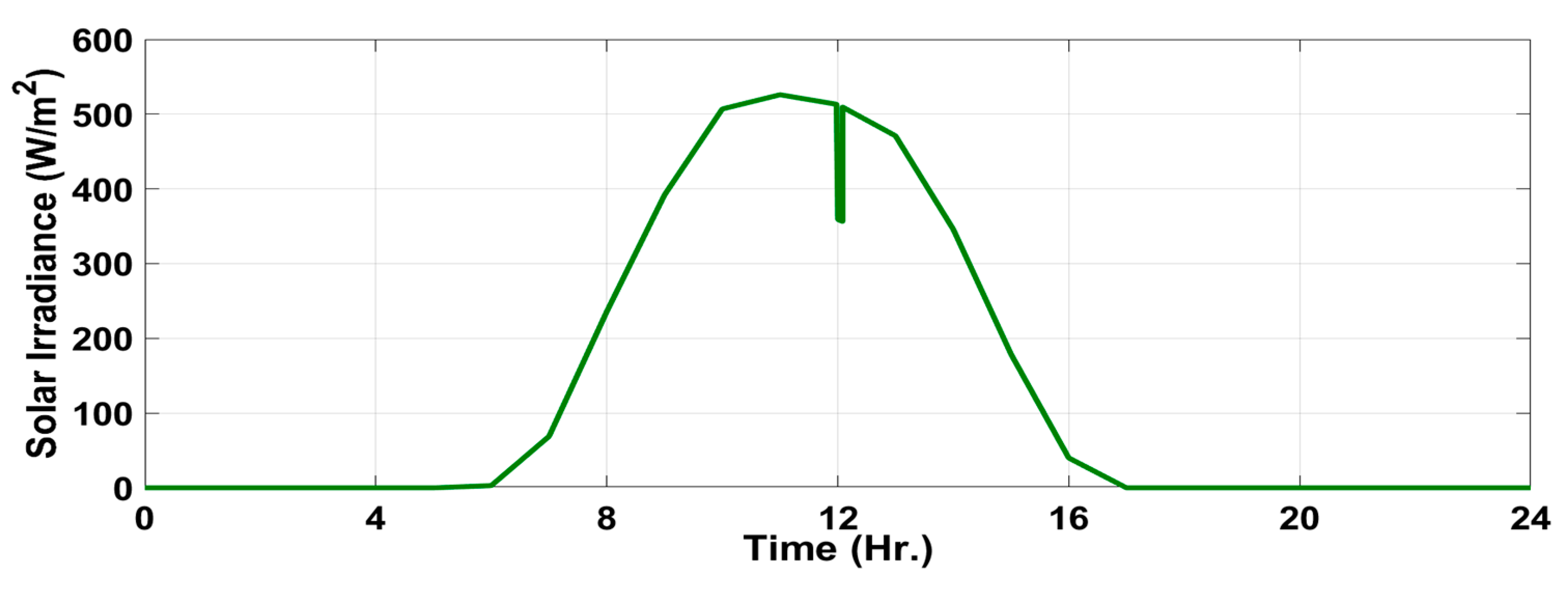
- Solar power production decreases with partial shading during the midday.
- At 22 h, a sudden trip occurs for the wind farm due to high wind speed.
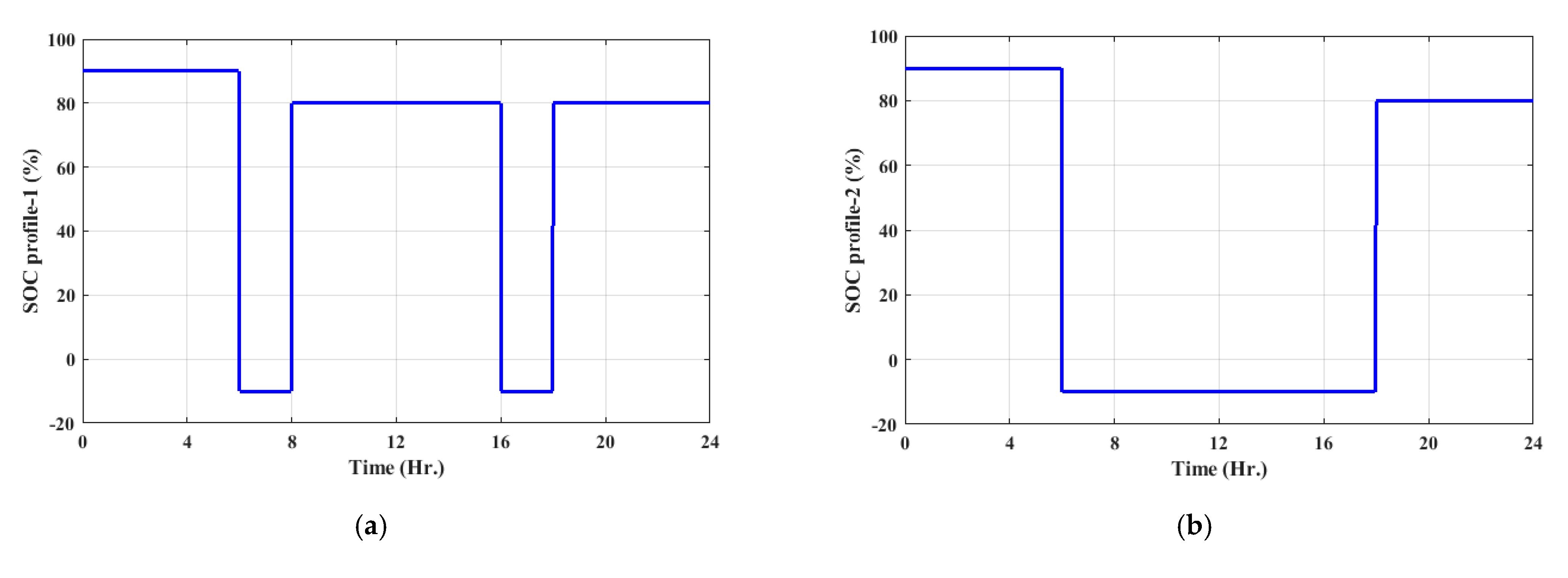
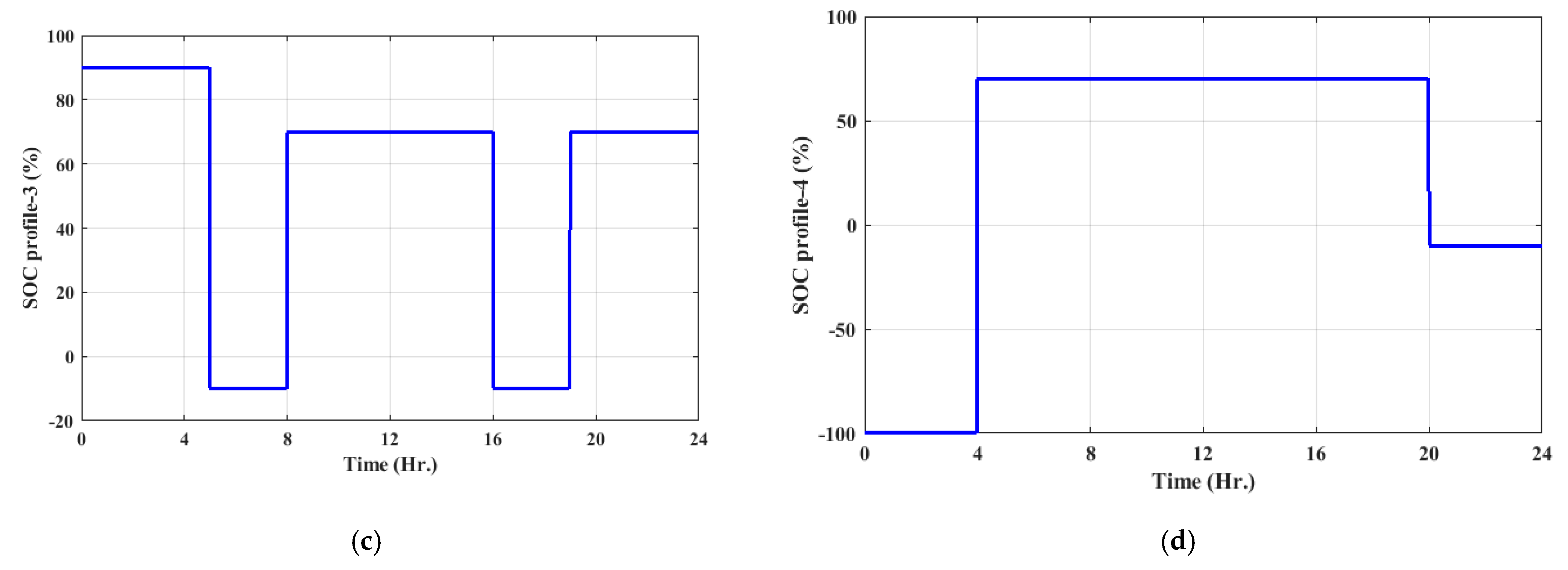
- People charging their cars during work “grid to vehicle (G2V) concept”.
- People going to work without their own car “V2G”.
- People not operating “vehicle to the grid—V2G”.
- People working during the night “G2V”.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gui, E.M.; Diesendorf, M.; MacGill, I. Distributed energy infrastructure paradigm: Community microgrids in a new institutional economics context. Renew. Sustain. Energy Rev. 2017, 72, 1355–1365. [Google Scholar] [CrossRef]
- Mahmoud, M.M. Improved current control loops in wind side converter with the support of wild horse optimizer for enhancing the dynamic performance of PMSG-based wind generation system. Int. J. Model. Simul. 2022, 00, 1–15. [Google Scholar] [CrossRef]
- Ma, Y.J.; Zhai, M.Y. Day-Ahead prediction of microgrid electricity demand using a hybrid artificial intelligence model. Processes 2019, 7, 320. [Google Scholar] [CrossRef]
- Gamarra, C.; Guerrero, J.M. Computational optimization techniques applied to microgrids planning: A review. Renew. Sustain. Energy Rev. 2015, 48, 413–424. [Google Scholar] [CrossRef]
- Gui, E.M.; MacGill, I. Typology of future clean energy communities: An exploratory structure, opportunities, and challenges. Energy Res. Soc. Sci. 2018, 35, 94–107. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Atia, B.S.; Abdelaziz, A.Y.; Aldin, N.A.N. Dynamic Performance Assessment of PMSG and DFIG-Based WECS with the Support of Manta Ray Foraging Optimizer Considering MPPT, Pitch Control, and FRT Capability Issues. Processes 2022, 12, 2723. [Google Scholar] [CrossRef]
- Debouza, M.; Al-Durra, A.; EL-Fouly, T.H.M.; Zeineldin, H.H. Survey on microgrids with flexible boundaries: Strategies, applications, and future trends. Electr. Power Syst. Res. 2022, 205, 107765. [Google Scholar] [CrossRef]
- Perez-DeLaMora, D.A.; Quiroz-Ibarra, J.E.; Fernandez-Anaya, G.; Hernandez-Martinez, E.G. Roadmap on community-based microgrids deployment: An extensive review. Energy Rep. 2021, 7, 2883–2898. [Google Scholar] [CrossRef]
- Dawood, F.; Shafiullah, G.M.; Anda, M. Stand-alone microgrid with 100% renewable energy: A case study with hybrid solar pv-battery-hydrogen. Sustainability 2020, 12, 2047. [Google Scholar] [CrossRef]
- Marqusee, J.; Becker, W.; Ericson, S. Resilience and economics of microgrids with PV, battery storage, and networked diesel generators. Adv. Appl. Energy 2021, 3, 100049. [Google Scholar] [CrossRef]
- Aslam, S.; Khalid, A.; Javaid, N. Towards efficient energy management in smart grids considering microgrids with day-ahead energy forecasting. Electr. Power Syst. Res. 2020, 182, 106232. [Google Scholar] [CrossRef]
- Warneryd, M.; Håkansson, M.; Karltorp, K. Unpacking the complexity of community microgrids: A review of institutions’ roles for development of microgrids. Renew. Sustain. Energy Rev. 2020, 121, 109690. [Google Scholar] [CrossRef]
- Arias-Londoño, A.; Montoya, O.D.; Grisales-Noreña, L.F. A chronological literature review of electric vehicle interactions with power distribution systems. Energies 2020, 13, 3016. [Google Scholar] [CrossRef]
- Colmenar-Santos, A.; Muñoz-Gómez, A.M.; Rosales-Asensio, E.; López-Rey, Á. Electric vehicle charging strategy to support renewable energy sources in Europe 2050 low-carbon scenario. Energy 2019, 183, 61–74. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Huangfu, Y.; Ravey, A.; Chrenko, D.; Gao, F. Hierarchical Operation of Electric Vehicle Charging Station in Smart Grid Integration Applications—An Overview. Int. J. Electr. Power Energy Syst. 2022, 139, 108005. [Google Scholar] [CrossRef]
- Aliabadi, S.F.; Taher, S.A.; Shahidehpour, M. Smart deregulated grid frequency control in presence of renewable energy resources by EVs charging control. IEEE Trans. Smart Grid 2018, 9, 1073–1085. [Google Scholar] [CrossRef]
- Egbue, O.; Uko, C. Multi-agent approach to modeling and simulation of microgrid operation with vehicle-to-grid system. Electr. J. 2020, 33, 106714. [Google Scholar] [CrossRef]
- Huang, X.Q.; Wang, F.; Tan, Y.H.; Wang, R.; Shao, J.K.; Chen, C. Coordinated scheduling of electric vehicles and renewable generation considering vehicle-to-grid mode. Chin. J. Eng. Des. 2016, 23, 67–73. [Google Scholar] [CrossRef]
- Zecchino, A.; Prostejovsky, A.M.; Ziras, C.; Marinelli, M. Large-scale provision of frequency control via V2G: The Bornholm power system case. Electr. Power Syst. Res. 2019, 170, 25–34. [Google Scholar] [CrossRef]
- Kumar, Y.V.P.; Bhimasingu, R. Design of voltage and current controller parameters using small signal model-based pole-zero cancellation method for improved transient response in microgrids. SN Appl. Sci. 2021, 3, 836. [Google Scholar] [CrossRef]
- Mahdavian, A.; Ghadimi, A.A.; Bayat, M. Microgrid small-signal stability analysis considering dynamic load model. IET Renew. Power Gener. 2021, 15, 2799–2813. [Google Scholar] [CrossRef]
- Zahedmanesh, A.; Muttaqi, K.M.; Islam, M.R.; Zhao, Y. Consensus-based decision making approach for techno-economic operation of largescale battery energy storage in industrial microgrids. J. Energy Storage 2022, 46, 103917. [Google Scholar] [CrossRef]
- Hannan, M.A.; Tan, S.Y.; Al-Shetwi, A.Q.; Jern, K.P.; Begum, R.A. Optimized controller for renewable energy sources integration into microgrid: Functions, constraints and suggestions. J. Clean. Prod. 2020, 256, 120419. [Google Scholar] [CrossRef]
- Ouramdane, O.; Elbouchikhi, E.; Amirat, Y.; Gooya, E.S. Optimal sizing and energy management of microgrids with Vehicle-to-Grid technology: A critical review and future trends. Energies 2021, 14, 4166. [Google Scholar] [CrossRef]
- Sadeghi, M.; Mollahasani, S.; Erol-Kantarci, M. Power loss-aware transactive microgrid coalitions under uncertainty. Energies 2020, 13, 5782. [Google Scholar] [CrossRef]
- Wong, Y.C.C.; Lim, C.S.; Goh, H.H.; Cruden, A.; Rotaru, M.D.; Kong, X. An Optimal Secondary Multi-Bus Voltage and Reactive Power Sharing Control Based on Non-Iterative Decoupled Linearized Power Flow for Islanded Microgrids. IEEE Access 2021, 9, 105242–105254. [Google Scholar] [CrossRef]
- Khan, M.Z.; Mu, C.; Habib, S.; Hashmi, K.; Ahmed, E.M.; Alhosaini, W. An optimal control scheme for load bus voltage regulation and reactive power-sharing in an islanded microgrid. Energies 2021, 14, 6490. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Siano, P.; Tipaldi, M.; Iervolino, R.; Mahfoud, F. Primary frequency response improvement in interconnected power systems using electric vehicle virtual power plants. World Electr. Veh. J. 2020, 11, 40. [Google Scholar] [CrossRef]
- Peng, F.Z. Flexible AC Transmission Systems (FACTS) and Resilient AC Distribution Systems (RACDS) in Smart Grid. Proc. IEEE 2017, 105, 2099–2115. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Esmail, Y.M.; Atia, B.S.; Kamel, O.M.; AboRas, K.M.; Bajaj, M.; Hussain Bukhari, S.S.; Mbadjoun Wapet, D.E. Voltage Quality Enhancement of Low-Voltage Smart Distribution System Using Robust and Optimized DVR Controllers: Application of the Harris Hawks Algorithm. Int. Trans. Electr. Energy Syst. 2022, 2022, 4242996. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Ratib, M.K.; Aly, M.M.; Abdel, A.M.M. Application of Whale Optimization Technique for Evaluating the Performance of Wind-Driven PMSG Under Harsh Operating Events. Process Integr. Optim. Sustain. 2022, 6, 447–470. [Google Scholar] [CrossRef]
- Marqusee, J.; Ericson, S.; Jenket, D. Impact of emergency diesel generator reliability on microgrids and building-tied systems. Appl. Energy 2021, 285, 116437. [Google Scholar] [CrossRef]
- Rezkallah, M.; Singh, S.; Chandra, A.; Singh, B.; Tremblay, M.; Saad, M.; Geng, H. Comprehensive Controller Implementation for Wind-PV-Diesel Based Standalone Microgrid. IEEE Trans. Ind. Appl. 2019, 55, 5416–5428. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; Sultan, H.M.; Mohamed, I.S.; Oleg, N.K.; Do, T.D. Application of different optimization algorithms for optimal sizing of pv/wind/diesel/battery storage stand-alone hybrid microgrid. IEEE Access 2019, 7, 119223–119245. [Google Scholar] [CrossRef]
- Sahoo, B.; Routray, S.K.; Rout, P.K.; Alhaider, M.M. Power quality and stability assessment of hybrid microgrid and electric vehicle through a novel transformation technique. Sustain. Energy Technol. Assess. 2022, 51, 101927. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; Sultan, H.M.; Kuznetsov, O.N. Optimal sizing of hybrid solar/wind/hydroelectric pumped storage energy system in Egypt based on different meta-heuristic techniques. Environ. Sci. Pollut. Res. 2020, 27, 32318–32340. [Google Scholar] [CrossRef]
- Rodrigues, Y.R.; de Souza, A.C.Z.; Ribeiro, P.F. An inclusive methodology for Plug-in electrical vehicle operation with G2V and V2G in smart microgrid environments. Int. J. Electr. Power Energy Syst. 2018, 102, 312–323. [Google Scholar] [CrossRef]
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid supervisory controllers and energy management systems: A literature review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Shuai, Z.; Sun, Y.; Shen, Z.J.; Tian, W.; Tu, C.; Li, Y.; Yin, X. Microgrid stability: Classification and a review. Renew. Sustain. Energy Rev. 2016, 58, 167–179. [Google Scholar] [CrossRef]
- El Zoghby, H.M.; Ramadan, H.S. Isolated microgrid stability reinforcement using optimally controlled STATCOM. Sustain. Energy Technol. Assess. 2022, 50, 101883. [Google Scholar] [CrossRef]
- Hussain, S.M.S.; Aftab, M.A.; Ustun, T.S. Performance analysis of iec 61850 messages in lte communication for reactive power management in microgrids. Energies 2020, 13, 6011. [Google Scholar] [CrossRef]
- Li, X.; Li, H.; Li, S.; Jiang, Z.; Ma, X. Review on Reactive Power and Voltage Optimization of Active Distribution Network with Renewable Distributed Generation and Time-Varying Loads. Math. Probl. Eng. 2021, 2021, 1196369. [Google Scholar] [CrossRef]
- Mengi, O.O. A five-level H-Bridge STATCOM for an off-grid PV solar farm under two controllers PI and PIλ-MPC hybrid. Int. J. Photoenergy 2018, 2018, 4030214. [Google Scholar] [CrossRef]
- Movahedi, A.; Niasar, A.H.; Gharehpetian, G.B. Designing SSSC, TCSC, and STATCOM controllers using AVURPSO, GSA, and GA for transient stability improvement of a multi-machine power system with PV and wind farms. Int. J. Electr. Power Energy Syst. 2019, 106, 455–466. [Google Scholar] [CrossRef]
- Tennakoon, S.B.; Scheidecker, D. Multi-level converters for static var compensation. IEE Colloq. 1997, 4, 91. [Google Scholar] [CrossRef]
- Chola, R.; Singh, S.B. A Case Study on 24-h Simulation of V2G System. Lect. Notes Electr. Eng. 2021, 667, 131–140. [Google Scholar] [CrossRef]
- Rehman, U.U.; Riaz, M. Vehicle to grid system for load and frequency management in smart grid. In Proceedings of the ICOSST 2017—2017 International Conference on Open Source Systems and Technologies, Lahore, Pakistan, 18–20 December 2017; Volume 2018, pp. 73–78. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Mass (m) | 1845 (kg) |
| Rolling resistance Coefficient (f) | 0.025 |
| Coefficient of air resistance (C) | 0.36 |
| Windward area (A) | 2.56 (m2) |
| Correction coefficient of the rotation mass (δ) | 1.03 |
| Transmission system efficiency (nt) | 0.9 |
| Gravity acceleration (g) | 9.8 (m/s2) |
| Road angle (α) | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamel, O.M.; Diab, A.A.Z.; Mahmoud, M.M.; Al-Sumaiti, A.S.; Sultan, H.M. Performance Enhancement of an Islanded Microgrid with the Support of Electrical Vehicle and STATCOM Systems. Energies 2023, 16, 1577. https://doi.org/10.3390/en16041577
Kamel OM, Diab AAZ, Mahmoud MM, Al-Sumaiti AS, Sultan HM. Performance Enhancement of an Islanded Microgrid with the Support of Electrical Vehicle and STATCOM Systems. Energies. 2023; 16(4):1577. https://doi.org/10.3390/en16041577
Chicago/Turabian StyleKamel, Omar Makram, Ahmed A. Zaki Diab, Mohamed Metwally Mahmoud, Ameena Saad Al-Sumaiti, and Hamdy M. Sultan. 2023. "Performance Enhancement of an Islanded Microgrid with the Support of Electrical Vehicle and STATCOM Systems" Energies 16, no. 4: 1577. https://doi.org/10.3390/en16041577