
Dynamic Response Difference of Hydraulic Support under Mechanical-Hydraulic Co-Simulation: Induced by Different Roof Rotation Position and Hysteresis Effect of Relief Valve

 ,
,
Abstract
:1. Introduction
2. The Mechanical-Hydraulic Co-Simulation Platform
2.1. The Mechanical System Model
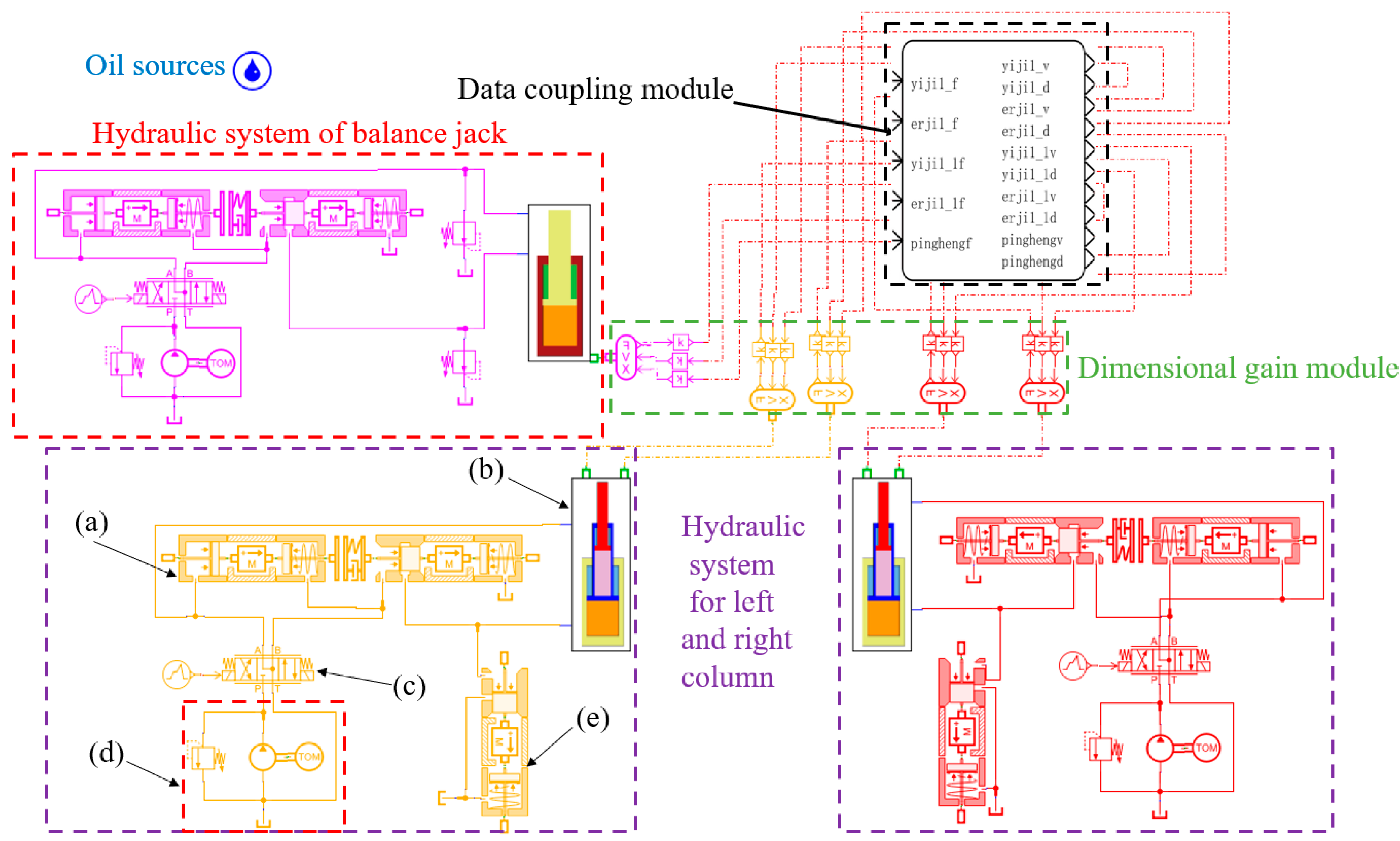
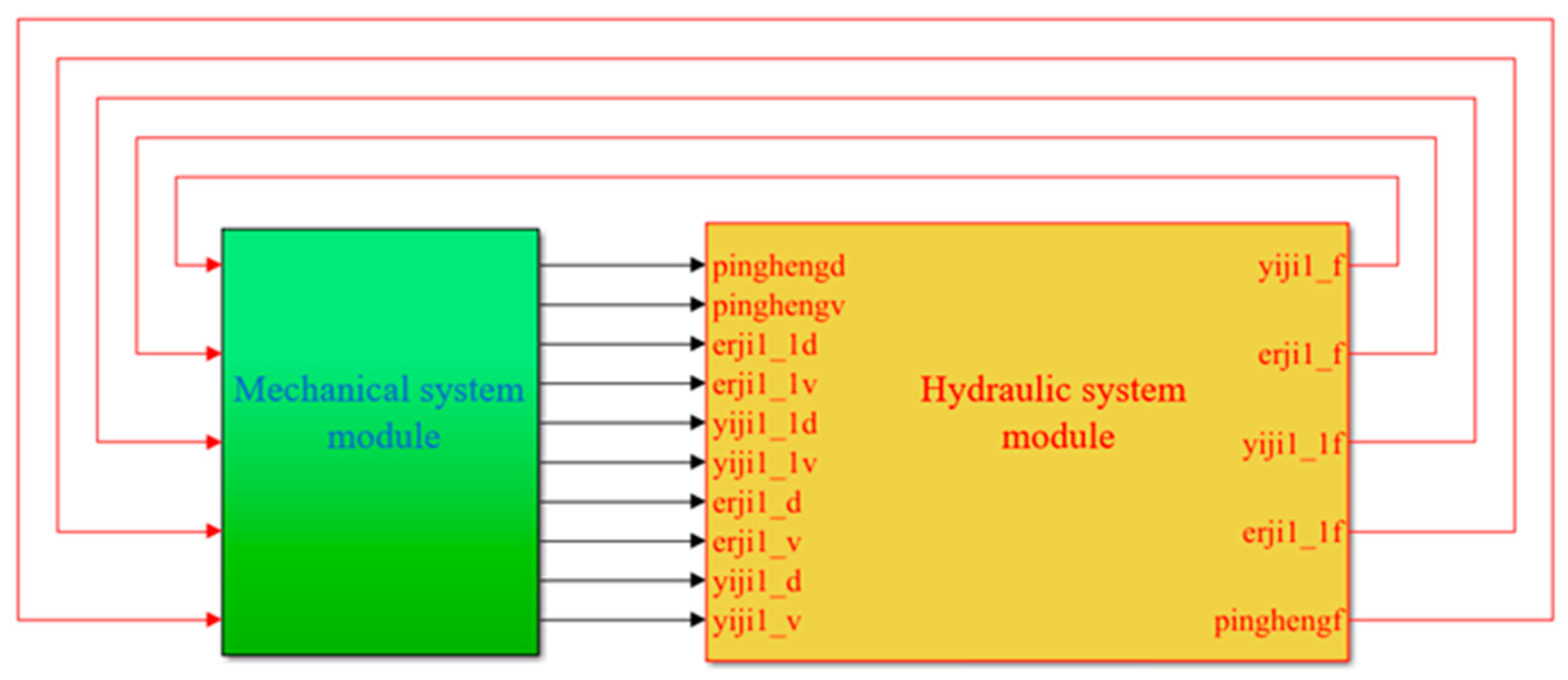
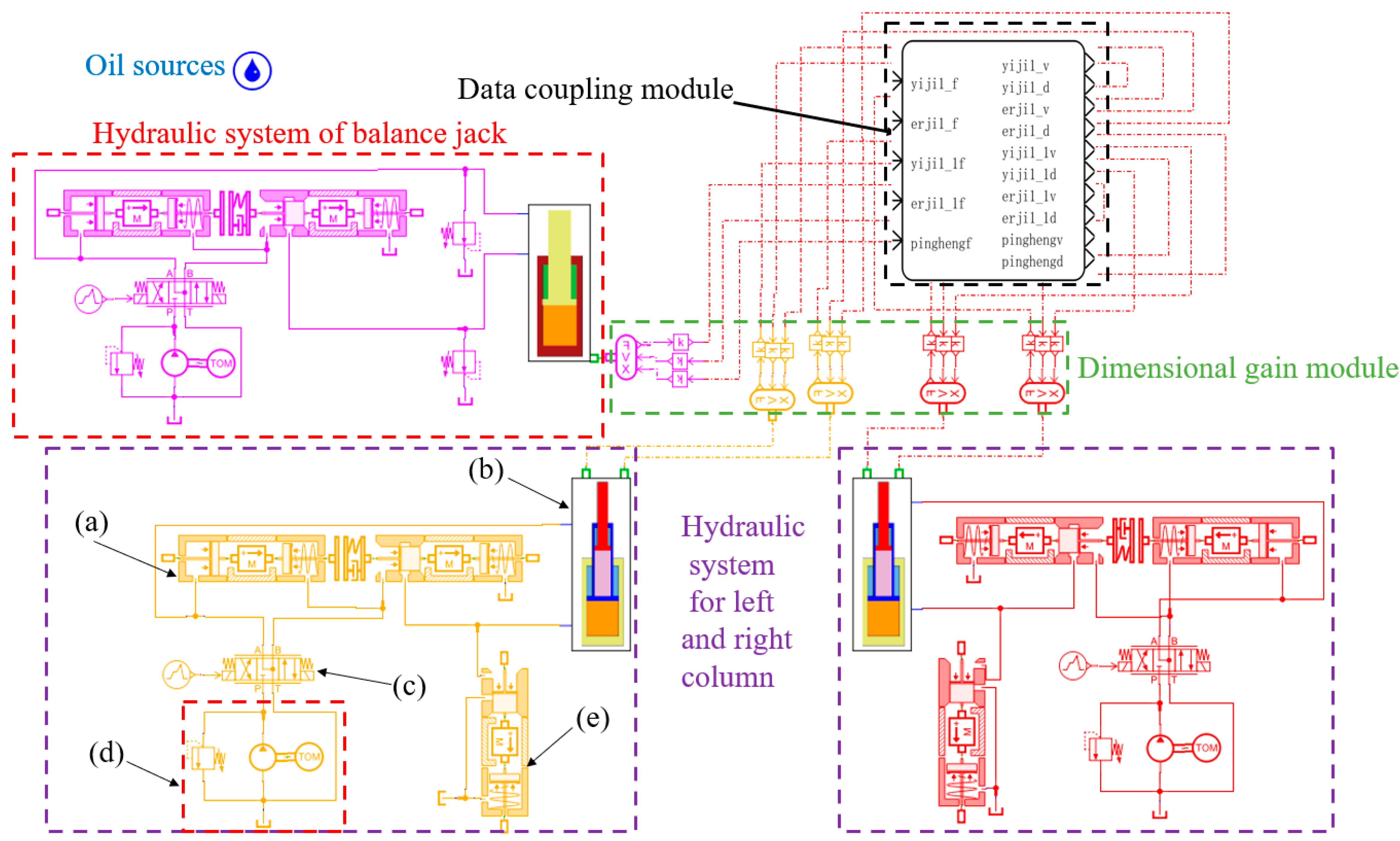
2.2. The Hydraulic System Model
2.3. Simulation of the Hydraulic Support Lifting Process
3. Dynamic Characteristics Analysis of the Hydraulic Support under Rotary Impact
3.1. Establishment of the Rigid-Flexible Coupling Dynamic Model of the Hydraulic Support
3.2. Effect of the Rotary Position on the Column System
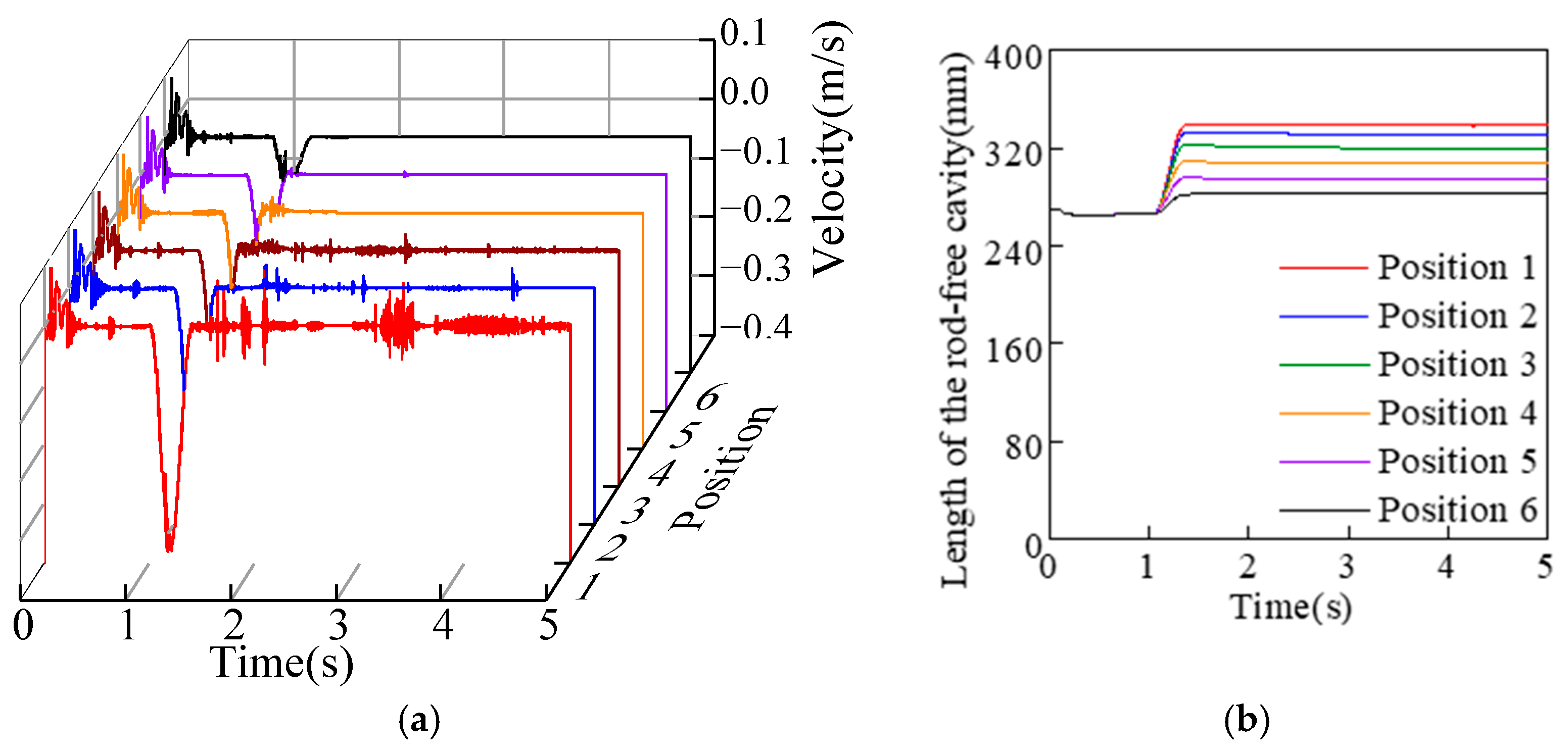
3.3. Effect of the Rotary Position on the Balance Jack System
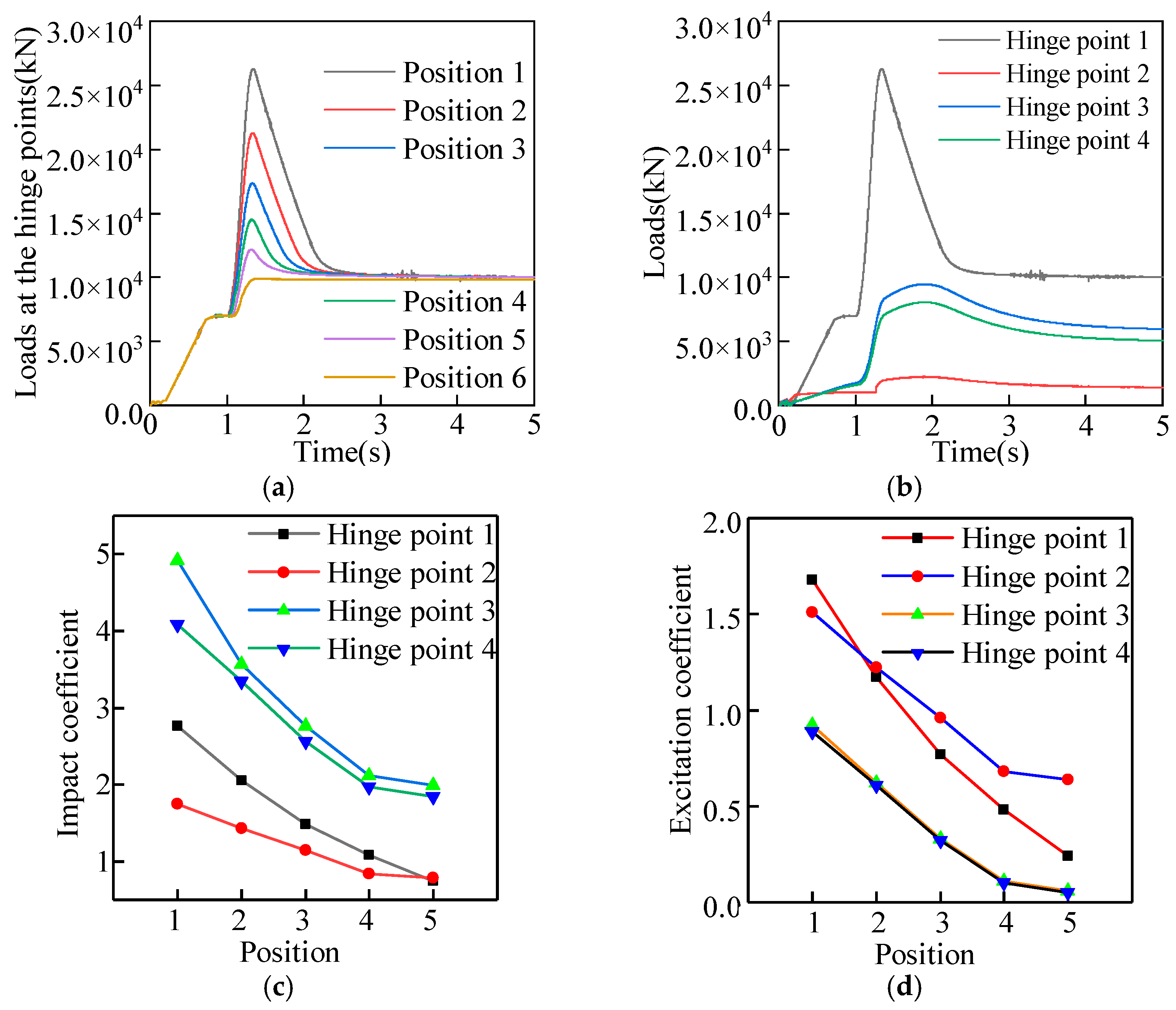
3.4. Effect of the Rotation Position on the Hinge Point Load
4. Influence of the Hysteresis Effect of the Relief Valve on the Energy Dissipation of the Hydraulic Support System
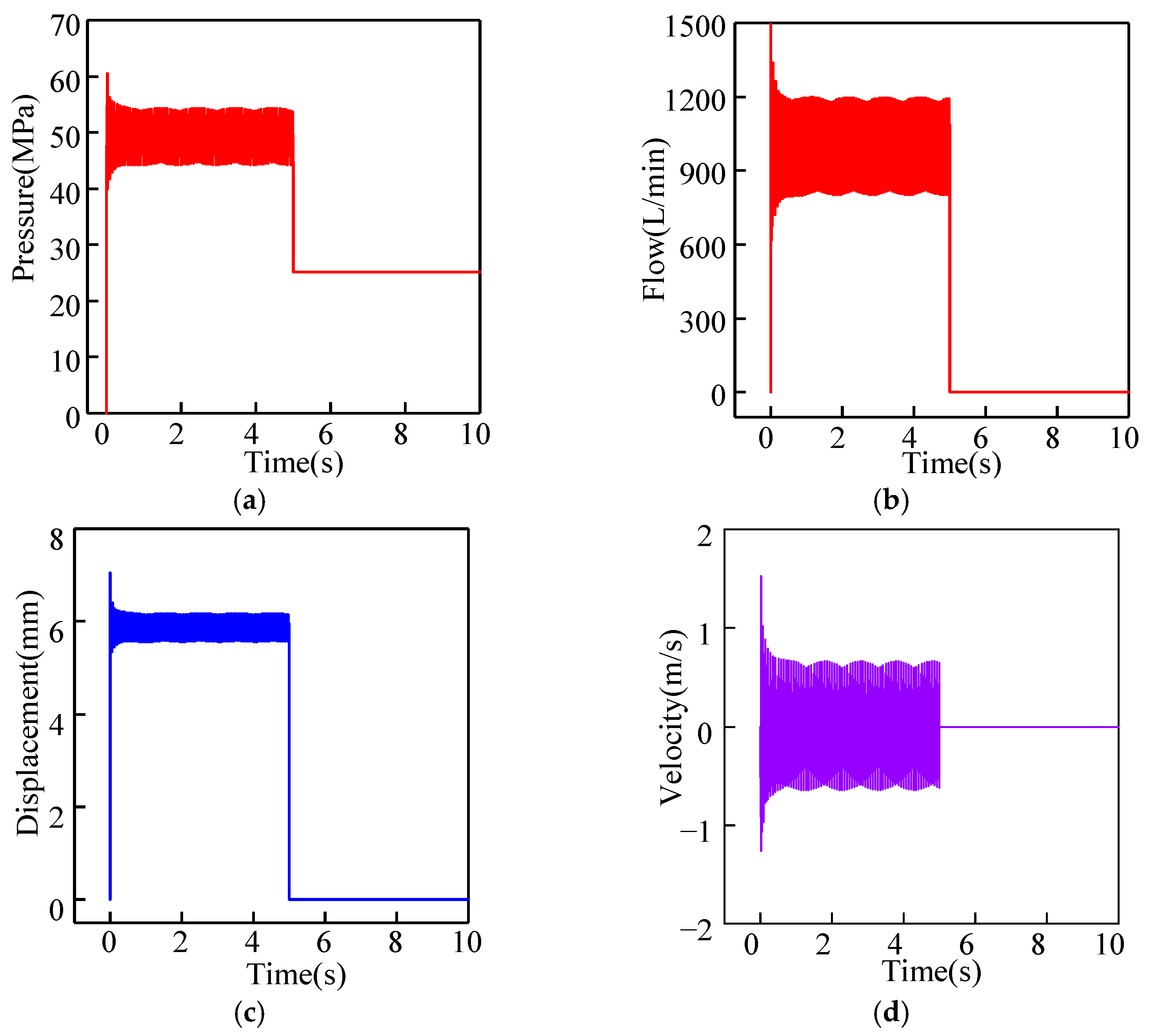
4.1. Analysis of the Dynamic Characteristics of the Relief Valve
- (1)
- The curves of flow rate, pressure, spool speed, and spool displacement during the opening of the relief valve are continuously fluctuating.
- (2)
- The maximum pressure of the relief valve is 60 MPa, and the minimum pressure is 40 MPa. The maximum flow rate is 1500 L/min, and the maximum speed of the spool is 1.5 m/s.
- (3)
- When the relief valve spool is opened continuously, the pressure is stabilized at 50 MPa, the flow rate is stabilized at 1000 L/min, and the spool displacement is stabilized at 6 mm.
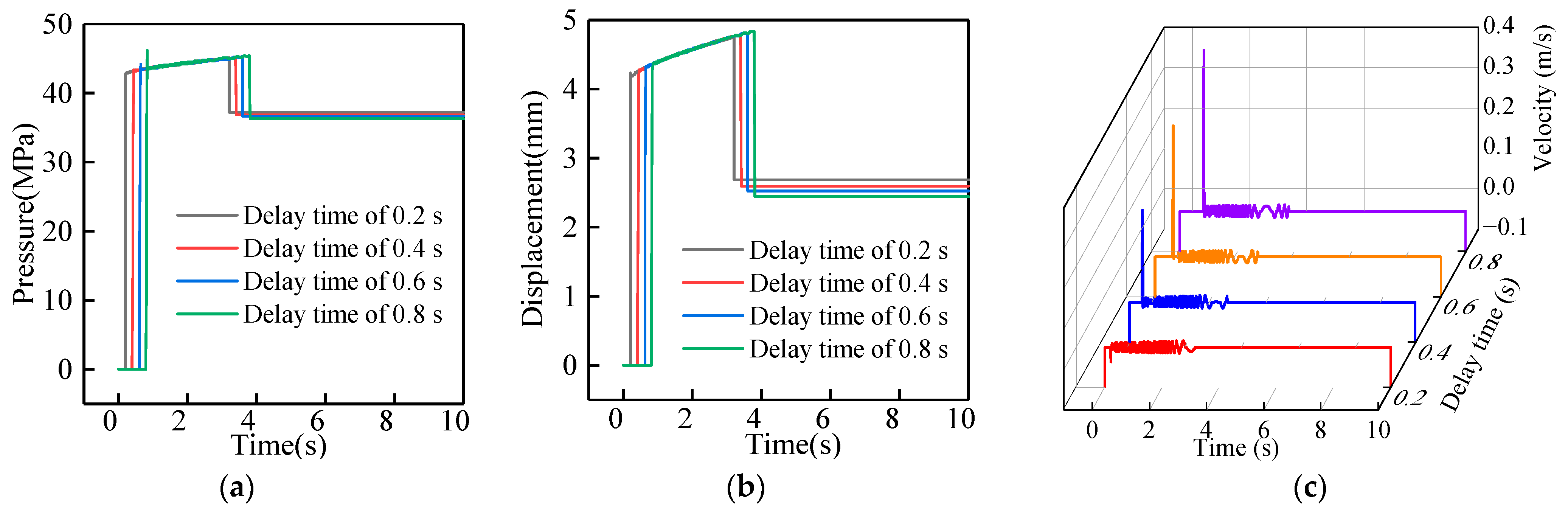
4.2. Response Discrepancy Analysis of the Delayed Opening of the Relief Valve
4.3. Effect on the Column Hydraulic System
4.4. Effect on the Hinge Point Load
5. Conclusions
- (1)
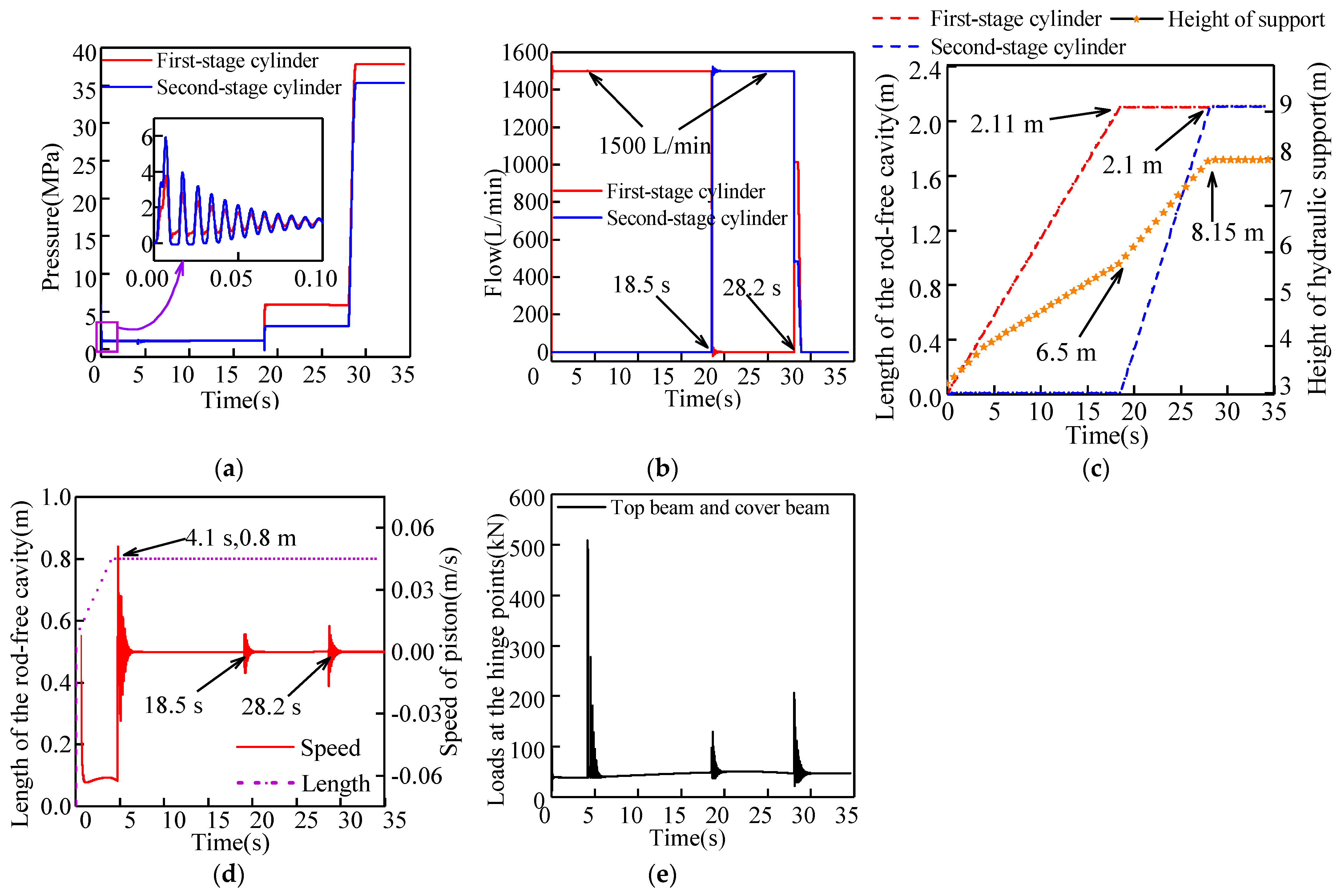
- Based on the established mechanical-hydraulic co-simulation platform for hydraulic supports, the lifting process of the hydraulic support is simulated. In addition, data on the system flow, pressure, and load at key hinge points during the process are analyzed. The simulation results reproduce perfectly the sequential working characteristics of the double telescopic column of the hydraulic support, indicating that the model is established and the method selection is reasonable and feasible. Compared with single mechanical and hydraulic simulations, the co-simulation process is easier to reproduce intuitively and dynamically, and the simulation results are more reasonable and reliable. The proposed method can support the follow-up study of the impact dynamics of the hydraulic support.
- (2)
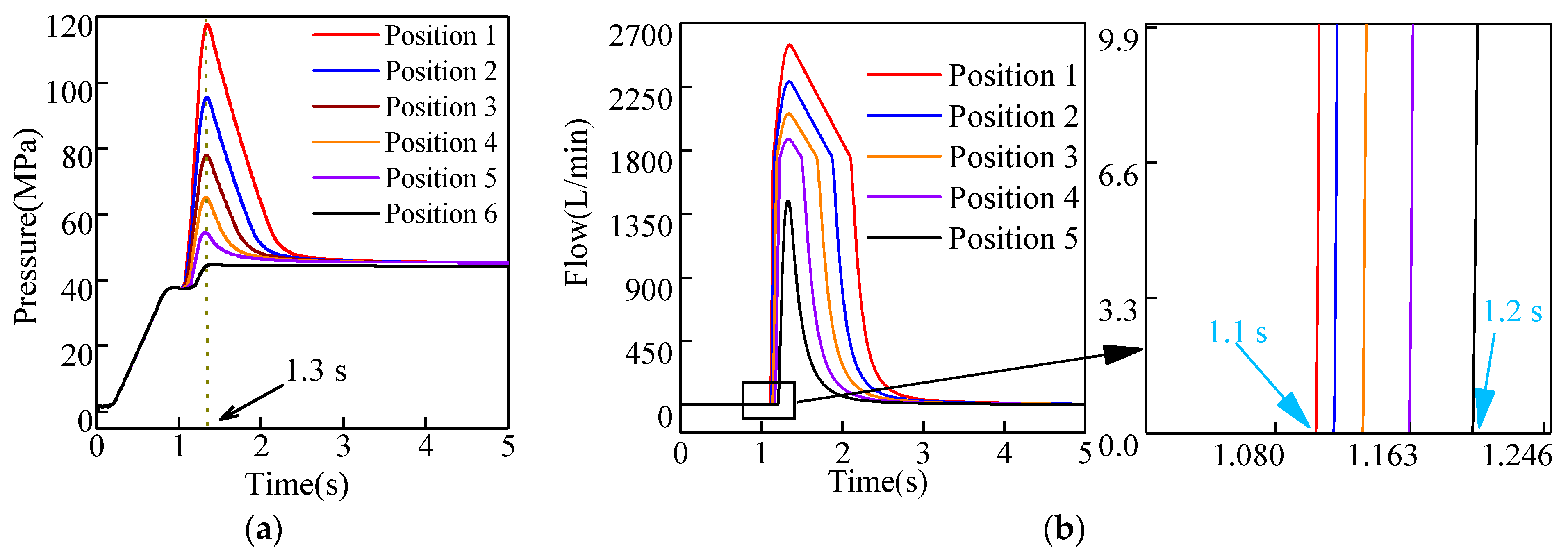
- The load acting on the hydraulic support decreases as the center of rotation of the roof moves backward. Therefore, the response characteristics of the hydraulic system are different. The peak pressure in the lower chamber of the column reduces from 119 MPa to 50 MPa, and the flow also shows the signature of sequential reduction. The relief time of the relief valve is delayed by 1 s. When the roof is located at the center of rotation 1, the passive stretch distance of the balance jack piston is the farthest, and the maximum velocity peak is −0.38 m/s. Affected by the overflow of the relief valve, the fluctuation of the balance jack piston is the most obvious during the stabilization process.
- (3)
- The hinge points at different locations exhibit different dynamic characteristics as the rotational position of the roof changes. When the roof is located at the center of rotation 1, the maximum peak load of hinge point 1 is 26,200 kN, the impact coefficient of hinge point 3 is the highest (4.42), and the excitation coefficient of hinge point 4 is the lowest (0.89). This indicates that the hinge points of the shield beam and the front connecting rod (hinge point 3) are more sensitive to the abrupt load, while the hinge points of the shield beam and the rear connecting rod (hinge point 4) are more adaptive to the impact load. The peak load, impact coefficient, and excitation coefficient at each hinge point decrease regularly as the roof rotation center point moves toward the back of the top beam.
- (4)
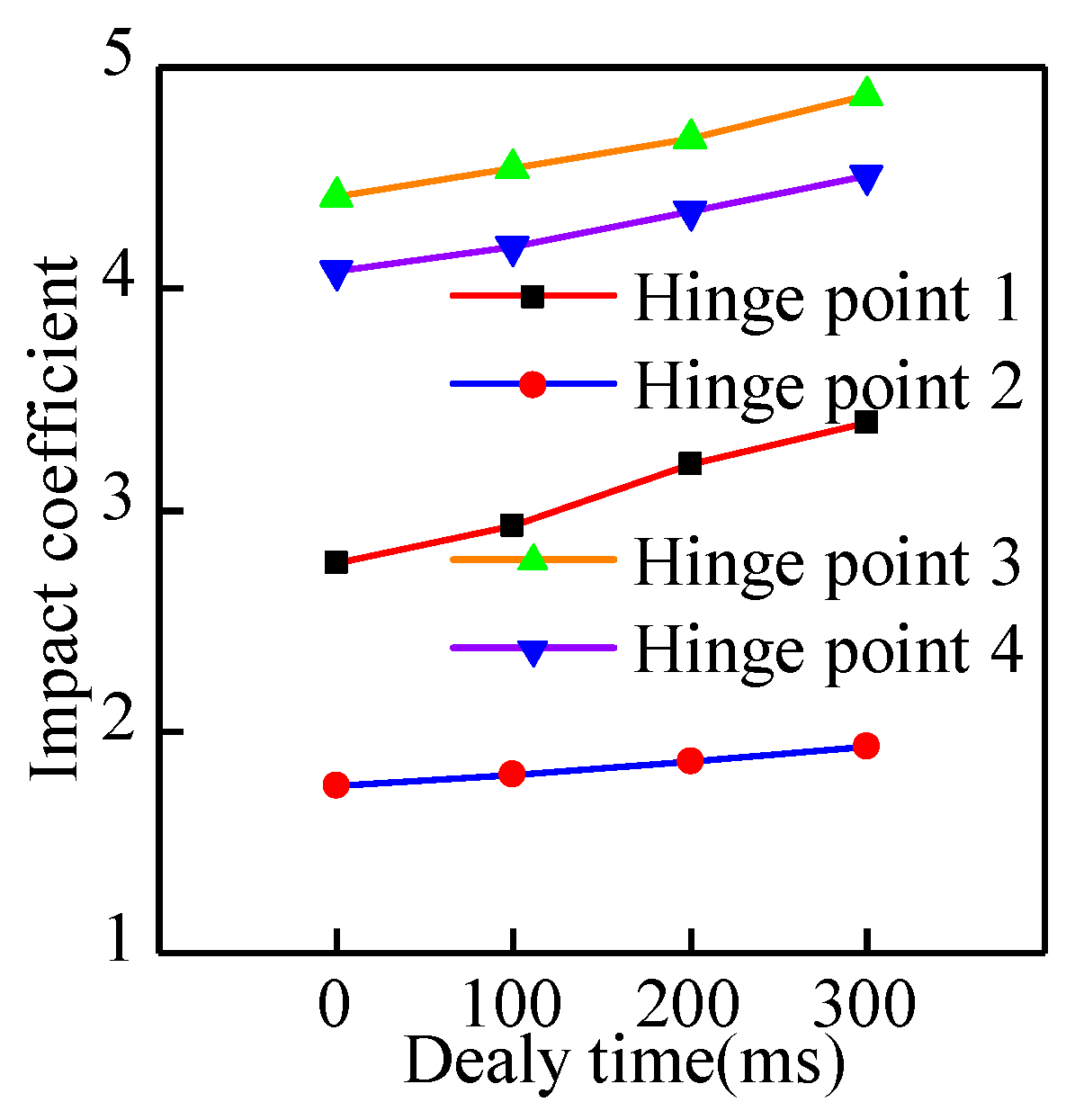
- The opening time can be extended to simulate the effect of the relief valve’s hysteresis on the system’s energy dissipation. The lower chamber pressure, the valve spool’s instantaneous opening velocity, and the hinge points’ peak load at different positions increase correspondingly with the extension of the opening time. However, the sensitivity of the hinge points at different positions to the hysteresis effect of the relief valve is different. The hinge points of the column and the top beam (hinge point 1) are the most sensitive (impact coefficient increases by 0.63), and the hinge points of the top beam and the shield beam (hinge point 2) are the least sensitive (impact coefficient increases by 0.18).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xie, H.P.; Wu, L.X.; Zheng, D.Z. Prediction on the energy consumption and coal demand of China in 2025. J. China Coal Soc. 2019, 44, 1949–1960. [Google Scholar]
- Hu, X.P.; Liu, X.H. Mechanism evolution mechanism of active support process of two-leg shield. Coal Sci. Technol. 2022, 1–12. [Google Scholar] [CrossRef]
- Wang, G.F.; Pang, Y.H.; Li, M.Z.; Ma, Y.; Liu, X.-H. Hydraulic support and coal wall coupling relationship in ultra large height mining face. J. China Coal Soc. 2017, 42, 518–526. [Google Scholar]
- Bu, Q.W.; Tu, M.; Zhang, X.Y.; Zhang, M.Z.; Qing, C. Analysis of Energy Accumulation and Dispersion Evolution of a Thick Hard Roof and Dynamic Load Response of the Hydraulic Support in a Large Space Stope. Front. Earth Sci. 2022, 10, 884361. [Google Scholar] [CrossRef]
- Meng, Z.S.; Zhang, J.M.; Xie, Y.Y.; Lu, Z.G.; Zeng, Q.L. Analysis of the Force Response of a Double-Canopy Hydraulic Support under Impact Loads. Int. J. Simul. Model. 2021, 20, 766–777. [Google Scholar] [CrossRef]
- Liang, L.C.; Tian, J.J.; Zheng, H. A study on force transmission in a hydraulic support under impact loading on its canopy beam. J. China Coal Soc. 2015, 40, 2522–2527. [Google Scholar]
- Zeng, Q.L.; Yang, C.X.; Liu, P. Stress Analysis of Hydraulic Powered Support for Ultra High Mining under Different Roof Pressure. Coal Technol. 2018, 37, 187–189. [Google Scholar]
- Zeng, Q.L.; Li, Z.J.; Wan, L.R. Load on bearing and hinge point of hydraulic support under different loading. Coal Eng. 2018, 37, 187–189. [Google Scholar]
- Zhao, F.; Qi, Y.H.; Xu, Z.L.; Dou, J.L. Establishment of failure model for shield beam in large mining height hydraulic support and it’s countermeasures research. J. China Coal Soc. 2019, 47, 182–188. [Google Scholar]
- Ren, H.W.; Zhang, D.S.; Gong, S.; Zhou, K.; Xi, C.; He, M.; Li, T. Dynamic impact experiment and response characteristics analysis for 1: 2 reduced-scale model of hydraulic support. Int. J. Min. Sci. Technol. 2021, 31, 347–356. [Google Scholar] [CrossRef]
- Zeng, X.T.; Meng, G.Y.; Zhou, J.H. Analysis on the pose and dynamic response of hydraulic support under dual impact loads. Int. J. Simul. Model. 2018, 17, 69–80. [Google Scholar] [CrossRef]
- Wang, D.L.; Zeng, X.T.; Wang, G.F.; Li, R. Adaptability Analysis of Four-Leg Hydraulic Support with Large Mining Height under Impact Dynamic Load. Shock. Vib. 2022, 2022, 2168871. [Google Scholar] [CrossRef]
- Wan, L.; Yu, X.; Ma, D.; Meng, Z.; Zeng, Q.; Qi, G. Dynamic Response Analysis of a Novel Anti-Impact Pressure Balance Jack. Energies 2022, 15, 5236. [Google Scholar] [CrossRef]
- Wan, L.R.; Yu, X.H.; Zeng, X.T. Performance analysis of the new balance jack of anti-impact ground pressure hydraulic support. Alex. Eng. J. 2022, 62, 157–167. [Google Scholar] [CrossRef]
- Zhao, L.; Han, L.; Zhang, H.; Jin, X.; Wu, T.; Yang, S. Dynamic response of a coal rock caving impact tail beam for hydraulic support. Sci. Rep. 2022, 12, 11535. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Zeng, Q.; Wan, L.; Zhang, Q. Simulation Research on Impact Contact Behavior between Coal Gangue Particle and the Hydraulic Support: Contact Response Differences Induced by the Difference in Impacted Location and Impact Material. Materials 2022, 15, 3890. [Google Scholar] [CrossRef]
- Zuo, C.; Wei, R.Y.; Wang, H.Y. Analysis of Combined Seal Characteristics of Large Cylinder Diameter Double Expansion Column Piston. Coal Technol. 2022, 41, 171–174. [Google Scholar]
- Zeng, Q.L.; Li, Z.J.; Wan, L.R.; Ma, D.; Wang, J. Research on Dynamic Characteristics of Canopy and Column of Hydraulic Support under Impact Load. Energies 2022, 15, 4638. [Google Scholar] [CrossRef]
- Liu, Y.A.; Chen, Y.M.; Zhang, K.; Huang, L.S.; Qi, Y.H.; Li, Y.X.; Zhong, D.H.; Wei, X.T.; Zhang, F.J. Analysis of impact characteristics of hydraulic column based on bidirectional fluid-structure coupling. Safe. Coal Mines 2022, 53, 143–147. [Google Scholar] [CrossRef]
- Song, Y.N.; Xu, X.C.; Zhang, W.W. Research on dynamic characteristics of two-stage safety valve of hydraulic support under impact loading. J. Ordnance Equip. Eng. 2022, 43, 242–248, 279. [Google Scholar]
- Zhao, H.Z.; Wang, X. Experimental Study on Characteristics of Safety Valve of Hydraulic Support under Roof Pressure. Coal Technol. 2022, 41, 222–225. [Google Scholar]
- Li, G.Z.; Chi, Z.Y.; Wang, J.H. Analysis and Research on Bearing Characteristics of Hydraulic Support Column for Fully Mechanized Mining Caving Top Coal. Coal Mine Mach. 2020, 41, 41–44. [Google Scholar] [CrossRef]
- Cai, Y.; Huang, L.M.; Cui, J.L. Simulation Analysis of Hydraulic System Characteristics of Large Bore Column Control Loop Based on AMESim. Coal Mine Mach. 2020, 41, 177–180. [Google Scholar]
- Cao, L.M.; Xu, G.; Su, G.; Cui, J.; Cai, Y.; Cao, H. Design of automatic pressurizing device of hydraulic support initial force. Energy Sci. Eng. 2020, 8, 2868–2877. [Google Scholar] [CrossRef]
- Zhang, X.F.; Shao, Y.; Fu, Y.Q. Mechanical and Hydraulic Co-simulation Analysis for Crane Luffing System based on Simcenter 3D. J. Mech. Eng. 2022, 1–8. [Google Scholar]
- He, J.; Yang, X.; Zhang, J.; Wang, S.M.; Shen, X.J.; Du, Y.; Li, C. Construction method of wet mix concrete spraying machine co-simulation model based on Automation Studio. Mach. Tool Hydraul. 2022, 50, 168–173. [Google Scholar]
- Huang, X.M.; Zhang, T.; Yin, R.Q. Fatigue Life Analysis of Scissor Mechanism Based on Mechanical and Hydraulic Co-simulation. J. Hunan Univ. (Nat. Sci.) 2021, 48, 21–30. [Google Scholar]
- Li, J.X.; He, Y. Analysis of Dynamic Characteristic of Rope Adjusting Device Based on ADAMD and AMESim Co-simulation. J. Taiyuan Univ. Technol. 2016, 47, 304–308. [Google Scholar]
- Lu, J.S.; Feng, G.B.; Sun, H.G. Co-simulating of Mechanical and Electro-hydraulic System for Virtual Auto-feeding Mechanism Prototyping Technology Based on AMESim/RecurDyn/Simulink. Fire Control Command Control 2016, 41, 188–192. [Google Scholar]
- Zhang, S.; Zhang, D.S.; Li, M.Z. Characteristic and Simulation Analysis of Anti-impact Column System in Hydraulic support. Chin. Hydraul. Pneum. 2022, 46, 101–107. [Google Scholar]
- Xu, Y.J. Coupling Analysis of Powered Support and Roof in Mining Face. Coal Min. Technol. 2015, 20, 39–42. [Google Scholar]
- Sun, Y.F.; Zheng, X.W.; Lin, X.K. Research on Hydraulic Circuit Optimization of Hydraulic Support Balance Jack Based on AMESim. Coal Mine Mach. 2020, 41, 156–158. [Google Scholar] [CrossRef]
- Cao, L.M.; Sun, S.J.; Zhang, Z. Optimal design of balance jack control loop of hydraulic support. J. Mine Autom. 2018, 44, 13–18. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parts | Length/mm | Width/mm | Weight/kg |
|---|---|---|---|
| Top beam | 5200 | 1850 | 13,400 |
| Shield beam | 4600 | 1780 | 13,200 |
| Front connecting rod | 3500 | 460 | 2010 |
| Rear connecting rod | 3450 | 1500 | 7200 |
| Base plate | 3900 | 1770 | 16,500 |
| Technical Parameters | Numerical Value |
|---|---|
| Height/m | 3.8~8.2 |
| Width/m | 1.9~2.2 |
| Initial support force/kN | 16,544 |
| Pumping station pressure/MPa | 37.5 |
| Working resistance/kN | 21,000 |
| Variable | Variable Category | Variable Effect |
|---|---|---|
| Input variable | yiji1_f | Left column first-stage cylinder force variable |
| erji1_f | Left column second-stage cylinder force variable | |
| yiji1_1f | Right column first-stage cylinder force variable | |
| eiji1_1f | Right column second-stage cylinder force variable | |
| pinghengf | Balance jack force variable | |
| Output variable | yiji1_v | Left column first-stage cylinder velocity variable |
| yiji1_d | Left column first-stage cylinder displacement variable | |
| eiji1_v | Left column second-stage cylinder velocity variable | |
| eiji1_d | Left column second-stage cylinder displacement variable | |
| yiji1_1v | Right column first-stage cylinder velocity variable | |
| yiji1_1d | Right column first-stage cylinder displacement variable | |
| eiji1_1v | Right column second-stage cylinder velocity variable | |
| eiji1_1d | Right column second-stage cylinder displacement variable | |
| pinghengv | Balance jack velocity variable | |
| pinghengd | Balance jack displacement variable |
| Hydraulic Cylinder | External Diameter/mm | Internal Diameter/mm | Piston Stroke/mm |
|---|---|---|---|
| First-stage cylinder | 560 | 500 | 2110 |
| Second-stage cylinder | 380 | 350 | 2100 |
| Balance jack cylinder | 320 | 230 | 800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Q.; Ma, C.; Meng, Z.; Wang, J.; Xu, P.; Lei, X. Dynamic Response Difference of Hydraulic Support under Mechanical-Hydraulic Co-Simulation: Induced by Different Roof Rotation Position and Hysteresis Effect of Relief Valve. Energies 2023, 16, 2052. https://doi.org/10.3390/en16042052
Zeng Q, Ma C, Meng Z, Wang J, Xu P, Lei X. Dynamic Response Difference of Hydraulic Support under Mechanical-Hydraulic Co-Simulation: Induced by Different Roof Rotation Position and Hysteresis Effect of Relief Valve. Energies. 2023; 16(4):2052. https://doi.org/10.3390/en16042052
Chicago/Turabian StyleZeng, Qingliang, Chen Ma, Zhaosheng Meng, Jiantao Wang, Penghui Xu, and Xiaowan Lei. 2023. "Dynamic Response Difference of Hydraulic Support under Mechanical-Hydraulic Co-Simulation: Induced by Different Roof Rotation Position and Hysteresis Effect of Relief Valve" Energies 16, no. 4: 2052. https://doi.org/10.3390/en16042052