

Investigation of a Cup-Rotor Permanent-Magnet Doubly Fed Machine for Extended-Range Electric Vehicles
School of Electrical and Information Engineering, Tianjin University, No. 92 Weijin Road, Tianjin 300072, China
*
Author to whom correspondence should be addressed.
Energies 2023, 16(5), 2455; https://doi.org/10.3390/en16052455
Submission received: 10 January 2023
/
Revised: 24 February 2023
/
Accepted: 27 February 2023
/
Published: 4 March 2023
(This article belongs to the Topic Advanced Electrical Machines and Drives Technologies)
Abstract
:This paper investigates a cup-rotor permanent-magnet doubly fed machine (CRPM-DFM) for extended-range electric vehicles (EREVs). The topology and operating principle of the powertrain system based on CRPM-DFM are introduced. Then, the mathematical model of CRPM-DFM is established and the feedback linearization control of CRPM-DFM is given to realize the decoupling control of flux and torque. Moreover, the torque characteristic of CRPM-DFM is analyzed and the load torque boundaries with sinusoidal steady-state solution of CRPM-DFM is deduced. In addition, the MTPA control is derived to improve the efficiency of CRPM-DFM, and the efficiency of CRPM-DFM regarding various operating modes is investigated. Furthermore, the speed optimization strategy of ICE is proposed to reduce fuel consumption. Finally, the driving performance and fuel economy of the powertrain system are verified by simulation.
1. Introduction
In recent years, to alleviate the pressure of energy shortage and environmental pollution, new-energy vehicles have been widely used [1,2,3]. New-energy vehicles could be mainly arranged in three classes as follows: pure electric vehicles, hybrid electric vehicles and extended-range electric vehicles (EREVs). Pure electric vehicles can achieve zero emissions, but the disadvantages such as long charging time, high battery capacity and poor endurance are still the bottlenecks preventing the widespread applications of pure electric vehicles [4]. Hybrid electric vehicles have the advantages of high endurance ability and low battery capacity, but the powertrain system structure of hybrid electric vehicles is complex and costly. Moreover, since the main power of hybrid electric vehicles is provided by an internal combustion engine (ICE), the effects of energy conservation and emission reduction are limited [5]. EREVs with high endurance ability, middle battery capacity and lower emissions have the advantages of pure electric vehicles and hybrid electric vehicles and avoid the disadvantages of them. Therefore, EREVs have attracted extensive attention [6,7].
As shown in Figure 1, the powertrain system of EREVs includes battery packs, traction motor and a range extender composed of an ICE and a generator [8]. The range extender and the traction motor in conventional EREVs are independent mechanically. When the battery is sufficient, the vehicle operates in pure electric state; when the battery is low, the range extender supplies power to the battery and traction motor, thus increasing the range of the vehicle [9].
However, the existence of a range extender will reduce the interior space and increase the complexity and the cost of the powertrain system [10,11,12,13]. In addition, the output power of the ICE needs to be converted from mechanical power to electrical power and then from electrical power to mechanical power to drive the vehicle, which will reduce the efficiency of the system [14,15].
Dual-mechanical port machines (DPMs) can be employed to make the powertrain system more compact, which integrates the generator and the traction motor together. Nevertheless, the DPMs usually need brushes and slip rings to feed current, which causes the inevitable problems of frequent maintenance and friction loss [16]. Brushless doubly fed machines (BDFMs) have obvious advantages of flexible power flow, improved efficiency and extended torque-speed characteristics, which make them a potentially promising candidate for new-energy vehicle applications [17].
By incorporating the concept of the DPMs into the BDFMs, a cup-rotor permanent-magnet doubly fed machine (CRPM-DFM) was proposed in [18]. The CRPM-DFM integrates the generator and the traction motor together, which saves interior space, reduces vehicle weight, and improves the powertrain system’s compactness. Moreover, the CRPM-DFM has no brush and slip ring, which improves the reliability and cost-effectiveness of the powertrain system. In addition, the CRPM-DFM transmits most of the output power of the ICE directly to the drive shaft in the form of electromagnetic power, which improves the efficiency of the powertrain system.
At present, there is little performance analysis of CRPM-DFM. The heat dispersion of the CRPM-DFM is studied, and a liquid cooling strategy of the CRPM-DFM is proposed in [18]. The equivalent circuit of the CRPM-DFM is given in [19]. The mathematical model of the CRPM-DFM under a two-phase rotor coordinate system has been established, and the open-loop working performance is analyzed [20]. However, different from the above studies, based on the previous work of the first author of this paper on modeling and control methods of a brushless doubly fed machine, the state space model of the CRPM-DFM in a synchronous coordinate system has been established. Then the static load capacity of the CRPM-DFM is analyzed, and the vector control strategy is proposed in [21].
To maximize the performance of CRPM-DFM, the appropriate machine control method should be designed. CRPM-DFM evolved from BDFM. The control method design of CRPM-DFM can refer to the existing research results of BDFM. The control methods of BDFM include scalar control, direct torque control and vector control [22,23,24]. The scalar control method has poor disturbance-rejection ability and is hardly used at present. A direct torque control method is simple, but it has the disadvantages of large computation and large torque ripple. Vector control is widely used and can be realized based on a double synchronous coordinate system and unified synchronous coordinate system, respectively. The speed adjustment range of vector control based on the double synchronous coordinate system is narrow, which is not suitable for the electric-vehicle driving field. The vector control based on the unified synchronous coordinate system is first oriented according to the magnetic field of the control machine or the power machine. Then, the variables of each machine are placed in a unified coordinate system by using the slip frequency relation between the windings of the two machines under the steady-state condition, and the BDFM is controlled by power machine stator field orientation, but there is coupling between flux and torque. To solve this problem, feedback linearization control of a brushless doubly fed motor is proposed in the literature [25]. In addition to the machine torque, the vector sum of the rotor flux of the power machine and the control machine is also selected as the control object, which realizes the decoupling control of the rotor flux and the torque. Besides, the literature [26] proposes the maximum torque per ampere (MTPA) control of BDFM, which minimizes the stator current amplitude when the output torque is the same, thus improving machine efficiency.
The motivation of this paper is to analysis the performance of the CRPM-DFM, which includes the operating principle, torque characteristics, and efficiency of the CRPM-DFM under different operating modes. In addition, to improve the driving performance and fuel economy of the powertrain system, the control strategy of CRPM-DFM and speed optimization strategy of ICE are proposed.
This paper is organized as follows: Section 2 introduces the structure, operating principle and operating modes of the powertrain system based on CRPM-DFM. Section 3 establishes the mathematical model and derives the feedback-linearization control method of CRPM-DFM. Section 4 analyzes the torque characteristic and derives the load torque boundaries with the sinusoidal steady-state solution of CRPM-DFM. Section 5 proposes the MTPA control method and analyzes the efficiency of CRPM-DFM in different operating modes. Section 6 proposes a speed optimization strategy of ICE. Section 7 built a simulation platform of the EREVs’ powertrain system based on CRPM-DFM and verifies the driving performance and fuel economy of the powertrain system. Section 8 is the summary of the whole paper.
2. The Powertrain System Based on CRPM-DFM
2.1. Structure and Operating Principle of the Powertrain System Based on CRPM-DFM
The construction of CRPM-DFM and the structure diagram of the powertrain system based on the CRPM-DFM are shown in Figure 2. It can be seen that the powertrain system based on the CRPM-DFM is constructed by an ICE, a CRPM-DFM, a bidirectional converter module, and a battery pack, where the CRPM-DFM consists of a wound stator, a rotating permanent-magnet stator and a cup rotor. The connection between the cup-rotor windings is a reverse phase sequence. The ICE is connected to the rotating permanent-magnet stator through a clutch. The reduction gear is connected to the cup rotor for driving the vehicle. The bidirectional converter is connected to the wound stator through which electrical energy is absorbed from or charged to the battery. The mechanical lock can be controlled independently, either to lock the permanent-magnet stator and cup rotor into one, or to allow them to rotate independently, in conjunction with the engagement or disengagement of the clutch, to achieve different operating modes.
The power machine is a permanent-magnet synchronous motor whose stator can be rotated, including the cup-rotor inner winding and the permanent-magnet stator and the pole number of ; the control machine is an asynchronous machine, including the wound stator and the outer winding of cup rotor and the pole number of . Among them, there is only an electrical connection between the inner and outer windings of the cup rotor and no magnetic coupling.
When the cup rotor and permanent-magnet stator can rotate independently, the CRPM-DFM is operating in doubly fed mode. Since the rotor windings are connected in reverse phase sequence, the air-gap magnetic fields on both sides of the cup rotor rotate in reverse at the same angular velocity relative to the rotor when the CRPM-DFM is running. Therefore, the cup-rotor speed can be obtained as:
From Equation (1), the cup rotor speed can be obtained according to the power supply frequency of the wound stator and the permanent-magnet stator speed. When , it is said that the CRPM-DFM runs in super-synchronous mode; when , it runs in sub-synchronous mode, and when , in synchronous mode.
The sum of the torque acting on the cup rotor by the power machine and the control machine is the output torque of the cup rotor, that is:
Ignoring the machine losses, the input and output power of the CRPM-DFM meet the following relation.
Combining Equations (1)–(3), the relationship can be obtained that the electromagnetic torques of the power machine and control machine are proportional to their pole pairs.
It can be seen from Equations (1)–(4) that the CRPM-DFM is a speed coupler similar to a planetary gear, in that the ratio of the pole number between the power machine and control machine is equal to the ratio of the tooth number between the ring gear and sun gear, and the electromagnetic torques of the wound stator and permanent magnet stator applied to the cup rotor corresponds to the torques of the ring gear and sun gear applied to the planet carrier, respectively. When the CRPM-DFM works in super-synchronous mode (the magnetic fields of both the power machine and control machine rotate in the positive direction), the power required by the vehicle is equal to the sum of the power output of the battery and the power output of the ICE; when the CRPM-DFM works in synchronous mode (the power machine magnetic field rotates in the positive direction, and the control machine magnetic field is stationary), the power required by the vehicle is provided by the ICE and the battery is not working; when the CRPM-DFM works in sub-synchronous mode (the power machine magnetic field rotates in the positive direction, and the control machine magnetic field rotates in the reverse direction), the power output of the ICE is equal to the sum of the power required by the vehicle and the power absorbed by the battery.
For the powertrain system based on CRPM-DFM, in doubly fed mode, the torque of the ICE is equal to the torque of the power machine. Hence, according to Equations (2) and (4), the relationship of the torques of cup rotor and ICE can be obtained.
In the configuration of the powertrain system based on CRPM-DFM, Equation (5) has certain practical significance on how to choose the size of CRPM-DFM and ICE. In the application of EREVs, the power of ICE is relatively small. In this design, the rated power of ICE is slightly larger than the average power of the driving vehicle, and the shortage of peak power and peak torque is made up by the control machine. In addition, the control machine also needs to meet the power and torque requirements under pure electric driving mode, so .
2.2. Basic Operating Modes of the Powertrain System Based on CRPM-DFM
When the locking device locks the rotor and the permanent magnet into one, or enables them to rotate independently, the CRPM-DFM has two working modes: asynchronous mode and doubly fed mode.
In asynchronous mode, the rotor and the permanent magnet are locked together. At this time, there is no electromagnetic induction between the rotor winding and the magnetic field generated by the permanent magnet, and the power machine does not output power. The CRPM-DFM is equivalent to an asynchronous machine with rotor series resistance and inductance. Since the permeability of the permanent magnet stator and the air is approximately equal, the air gap of the control machine is much smaller than that of the power machine. In this case, the inductance of the power machine rotor is very small, the armature reaction is weak and the magnetic circuit of power machine will not saturate because of a large current.
In doubly fed mode, the rotor and the permanent magnet rotate independently, and the torque direction of the two machines is the same, but when the power supply frequency of control machine is greater than zero or less than zero, the power flow of the control machine is reversed, corresponding to the discharging or charging of the battery. The vehicle-requested torque is proportionally distributed to the power machine and control machine. By controlling , the ICE speed optimization can be realized to reduce fuel consumption and restrict the fluctuation of battery SOC simultaneously.
As shown in Figure 2, the CRPM-DFM is used for a vehicle’s hybrid power plant. The asynchronous mode is only used for pure electric mode to drive vehicles or brake vehicles, and to start the ICE. The doubly fed mode is only used for driving vehicles and stopping to charge batteries. Taking forward driving as an example, the conversion sequence from doubly fed mode to asynchronous mode is as follows: release the throttle → drive torque returns to zero → press the brake pedal → release the clutch → the brake makes the permanent magnet stator speed slow down to the same speed as the cup rotor → the lock device locks the permanent magnet stator and the cup rotor → the motor operates in asynchronous mode; on the contrary, the conversion sequence from asynchronous mode to doubly fed mode is as follows: release the brake pedal → brake torque returns to zero → press down the accelerator pedal → release the locking device → clutch closes → the CRPM-DFM works in doubly fed mode.
Because the control method of the asynchronous mode is the same as that of a general asynchronous motor, we will not repeat it here. The control method and characteristics of CRPM-DFM in doubly fed mode are discussed in the following part. As for the content of parking charging, only an efficiency map is provided in this paper.
3. Mathematical Model and Feedback Linearization Control of CRPM-DFM
This section establishes the mathematical model of CRPM-DFM as the basis for the following analysis and design at first. Then, to decouple the rotor flux and the torque, feedback linearization control is solved.
3.1. Mathematical Model of CRPM-DFM
By adopting the equal power transformation and considering counterclockwise rotation as positive, the relationship between each coordinate system can be obtained as shown in Figure 3.
In the rotor dq coordinate system, the voltage models of the power machine and control machine are as follows.
where is the electric angular velocity of the permanent magnet stator relative to the cup rotor, and .
According to the inverted phase sequence of the cup rotor windings, the relation of rotor voltage and current between the control machine and the power machine in the rotor dq coordinate system is as follows.
Taking the control machine as the reference, the variables of the power machine can be redefined after taking negative conjugate transformation, as follows.
According to Equations (6) and (8), the CRPM-DFM’s mathematical model in the rotor dq coordinate system is as follows.
where and .
Equation (9) is a four-order model. After the negative conjugate operation of the variables of the power machine, all variables of CRPM-DFM rotate in the same direction with respect to the rotor dq coordinate system, which is convenient for the following research and analysis of the CRPM-DFM.
From Equation (9), the state-space model of CRPM-DFM in rotor dq coordinate system can be obtained.
where , and .
The electromagnetic torque of CRPM-DFM is:
Both the flux and the electromagnetic torque need to be controlled. Actually, a machine control system generally has a fast-responding current loop. At this time, the CRPM-DFM is approximately powered by the current source. To obtain the mathematical model when the CRPM-DFM is supplied by the current source, the new state variable should be defined as:
The relationship between the old and new state variables is:
From Equations (10) and (13), the state-space model expressed by the new state variables can be obtained:
where , .
It can be seen from Equation (14) that is not affected by the control machine stator voltage. Since the permeability of the permanent-magnet stator and the air is approximately equal and the air gap of the control machine is much smaller than that of the power machine, is very small and . In this case, the new state variable is approximately equal to the rotor flux of the control machine , so it is also called the rotor flux of the control machine, and it can also reflect the saturation of the rotor magnetic circuit of the control machine.
In addition, all variables in the rotor dq coordinate system are AC values, so Equation (14) is transformed into the control-machine synchronous coordinate system. After that, all variables are DC values, which is conducive to later analysis and design. The rotation transformation rule is:
According to Equations (14) and (15), the mathematical model in the synchronous coordinate system can be obtained:
where and .
Furthermore, under the premise that the CRPM-DFM is supplied by the current source, the stator voltage equation can be removed. Defining as the state variable and as the input variable, the new two-order mathematical model can be obtained as:
By substituting Equation (12) into Equation (11), the electromagnetic torque of the CRPM-DFM expressed by the new state variable is:
Finally, the CRPM-DFM’s motion equation is:
3.2. Feedback Linearization Control of CRPM-DFM
Next, the synchronous coordinate system is oriented according to the rotor flux, which is and . After that, Equations (17) and (18) can be written as:
With rotor flux and electromagnetic torque as output variables, Equation (20) can be expressed in the following form:
where and .
When is non-singular, the control law of input-output feedback linearization can be obtained:
where is the new input variable and, under the control law of Equations (21) and (22), can be written as:
According to Equation (23), from to the rotor flux is an inertia link, and is the same as torque, and there is no connection between the rotor flux of the control machine and torque. The reference values of the input variables are:
non-singular is the premise of feedback linearization, which needs to be satisfied:
A sufficient condition for Equation (25) is:
4. Torque Characteristic Analysis of CRPM-DFM
For the given values of speed difference between a permanent-magnet stator and cup rotor, rotor flux and load torque, feedback linearization control can give two solutions: a sinusoidal steady-state solution and non-sinusoidal steady-state solution. Taking the machine parameters in Table A1 as an example, the typical response waveforms of a sinusoidal steady-state solution and non-sinusoidal steady-state solution of the CRPM-DFM under feedback linearization control are shown in Figure 4.
Under a different permanent-magnet flux, rotor flux and speed difference, the range of torque with the sinusoidal steady-state solution is different. When the output torque exceeds the load torque boundaries, the non-sinusoidal steady-state solution exists, although the machine can still output a stable speed and torque, but the voltage and current change rate increases, and the amplitude will oscillate periodically, which requires the converter to improve the voltage and current tolerance level and provide a higher DC voltage; otherwise, the CRPM-DFM will go out of control. However, the IGBT with higher voltage and current tolerance level will increase the cost of the system. Therefore, for the powertrain system based on CRPM-DFM, the use of a non-sinusoidal steady-state solution will be avoided unless it is absolutely necessary.
The sinusoidal steady-state solution corresponds to the constant solution of Equation (20) and the constant slip frequency. For a certain permanent magnet stator speed, slip frequency and rotor flux, a set of algebraic equations can be obtained by making , and in Equation (20). Then, the torque range obtained when the equations have a constant solution is the torque range with the sinusoidal steady-state solution of CRPM-DFM. Therefore, by substituting the first two lines of Equation (20) into the third line of Equation (20), the load torque can be expressed as:
According to Equation (27), because the amplitude of the m-axis component of the permanent-magnet flux cannot exceed the amplitude of the permanent-magnet flux, when or , the upper and lower load torque boundaries can be obtained. Taking as an example, the values and width of load torque boundaries are:
From Equation (28), the upper, lower and width of load torque boundaries are proportional to the speed difference and inversely proportional to the rotor resistance. Because the numbers in the two square brackets in the expressions of lower and upper torque boundaries are not equal, the slopes of the lower and upper torque boundaries are different as the speed difference changes. Besides, the change of the lower and upper torque boundaries with the rotor flux amplitude of the control machine is a quadratic curve, the lower and upper torque boundaries are asymmetric, especially when , the upper boundary is and the lower boundary is 0; changing the sign of speed difference, the lower and upper torque boundaries will switch but the width remains the same.
Taking the machine parameters in Table A1 as an example, and the per-unit value of torque is applied, which is ,, the load torque boundaries of CRPM-DFM are obtained, as shown in Figure 5.
To further illustrate, let in Figure 5 to get the curve of Figure 6. When , the lower and upper torque boundaries of the CRPM-DFM will decrease with the increase in the amplitude of rotor flux, and even . When , the lower and upper torque boundaries of the CRPM-DFM will increase with the increase in the amplitude of rotor flux, and even , as shown in Figure 6a,b. When the amplitude of rotor flux is constant, the upper, lower and width of load torque boundaries will linearly increase with the increase of ; when the sign of changes, the lower and upper torque boundaries will switch, as shown in Figure 6c.
According to Equation (28) and Figure 6, only when the speed difference is slight will the output torque of CRPM-DFM with sinusoidal steady-state solution be limited. In most cases, the rotor flux amplitude and the speed difference can be appropriately adjusted to make the maximum output torque of CRPM-DFM with sinusoidal steady-state solution to meet the driving requirements of several times the rated torque. Only in some special cases can the CRPM-DFM be driven under a non-sinusoidal steady-state solution, such as starting the ICE when the vehicle is parked; at this time, the ICE speed and vehicle speed are both zero: . In addition, as described in the next section, the maximum torque per ampere (MTPA) control can effectively reduce the stator current of CRPM-DFM.
5. MTPA Control and Efficiency Analysis of CRPM-DFM
5.1. MTPA Control of CRPM-DFM
To reduce the amplitude of the control machine stator current and improve the efficiency of CRPM-DFM, the maximum-torque-per-ampere (MTPA) control strategy is presented. The results of this section show that the amplitude of the control machine stator current can be greatly reduced only by slightly adjusting the rotor flux of the control machine in the vicinity of the permanent-magnet flux. Meanwhile, because the rotor flux changes little, it will not lead to magnetic circuit saturation. The derivation of MTPA control law is as follows.
According to Equation (20), the relationship between the load torque and the m-axis component, t-axis component and amplitude of control machine stator current is:
Next, take the partial derivatives of the amplitude of the control machine stator current with respect to and set it equal to zero; that is:
By substituting the first line of Equation (29) into Equation (30), the following relationship can be obtained:
In Equation (31), and are replaced by constant values, and the necessary and sufficient condition for MTPA control when the sinusoidal steady state solution of CRPM-DFM is obtained is that the rotor flux of the control motor is given and satisfies the following relation:
According to Equations (27) and (32) and , the two components of the permanent-magnet flux, and , can be removed, and the flux can be expressed as a function of the given torque and speed difference; that is:
Under the given values of and , the reference value can be solved offline, and MTPA can be realized in open loop by the table lookup method. Figure 7 shows the variation of control-machine flux with torque and speed difference when MTPA control is adopted in the Table A1 machine parameters.
Figure 8 shows the reference value of rotor flux under MTPA control at different torque and speed differences. It can be seen that when , the amplitude of the rotor-flux reference value decreases slightly with the increase in the torque and when , the amplitude of the rotor-flux reference value increases slightly with the increase in the torque. Besides, the smaller the speed difference amplitude, the greater the flux changes. When , the amplitude of the reference value of rotor flux increases slightly with the increase in the amplitude of speed difference , and when , the amplitude of the rotor-flux reference value decreases slightly with the increase of . Obviously, the torque in Equation (33) should be within the lower and upper torque boundaries with the sinusoidal steady-state solution. Besides, as shown in Figure 7 and Figure 8, the greater the torque, the greater the flux changes, and the flux changes monotonically with the torque and speed difference when , and when , .
The inputs of the feedback linearization control (FLC) are the torque instruction value, which is obtained by the speed loop, and the rotor flux instruction value, which is obtained by MTPA. Then, the instruction values of the control-machine stator current are obtained from the feedback linearization control law. In addition, the synchronization angle can be obtained by integrating the angular velocity of the slip angle and the electric angular velocity of the rotor, which can be used for rotation transformation. According to the second line of Equation (20), the slip angular speed can be obtained with the rotor flux instruction value and stator current of the control machine.
Then, the system structure can be simplified without the flux observer.
Finally, under the control block diagram in Figure 9, the MTPA performance is verified by simulation, and the machine parameters are also shown in Table A1. Simulation results of MTPA control are shown in Figure 10a. Simulation results of constant control are shown in Figure 10b, in which Figure 9 does not contain MTPA control and . The permanent-magnet stator speed is . The CRPM-DFM runs sub-synchronously in 1–3 s, synchronously in 3–5 s and super-synchronously in 5–7 s. The load torque is in 1–7 s and in 7–9 s. Under MTPA control and , the amplitude of the rotor-flux reference value decreases slightly with the decrease in the amplitude of speed difference, and the amplitude of the rotor-flux reference value increases slightly with the decrease in load torque, which follows the trend shown in Figure 8. The amplitude of the control-machine stator current under MTPA control is far less than that under constant control.
5.2. Efficiency Analysis of CRPM-DFM
As described in the paper, small rotor loss is the key to improving the performance of CRPM-DFM. According to the references, to reduce rotor loss, these kinds of motors all use copper conductors instead of cast aluminum conductors. In addition, to reduce eddy current loss, an interior permanent magnet is used. The efficiency maps of CRPM-DFM in different operating modes are shown in Figure 11, where the original data of all efficiency maps in this section are obtained by simulation under the MATLAB/Simulink environment, and the control block diagram is shown in Figure 9.
The CRPM-DFM has two mechanical ports and one electrical port, each of which can input power or output power. The loss of CRPM-DFM includes copper loss, iron loss, PM loss, mechanical loss and loss caused by PWM. The total loss of CRPM-DFM is equal to the difference between the input power of each port and the output power of each port; that is, the efficiency of CRPM-DFM is equal to the ratio of the sum of the output power of each port and the sum of the input power of each port. The calculation method of efficiency is as follows: in hybrid driving mode, when the cup-rotor speed is less than , the speed difference is , and when is greater than , the speed difference is , and the machine efficiency is the ratio of the power output of the cup rotor and the sum of the power input of the stator of the control machine and power machine; in pure electric driving mode, the machine efficiency is the ratio of the power output of the cup rotor and the power input of the stator of the control machine; in parked charging mode, the machine efficiency is the ratio of the power output of the stator of control machine and the power input of the stator of the power machine; in regenerative braking mode, the machine efficiency is the ratio of the power output of the control-machine stator and the power input of the cup rotor.
As can be seen from Figure 11, parked charging mode is slightly less efficient than other operating modes, but the CRPM-DFM can maintain relatively high efficiency within a wide range of speed and torque variation in different operating modes, which meets the requirements of EREVs.
6. ICE Speed Optimization Strategy
In hybrid driving mode, the CRPM-DFM works in doubly fed mode, and the vehicle-requested torque is distributed to the ICE and control machine in proportion to the pole pairs. In this case, the CRPM-DFM is equivalent to a speed coupler and the ICE speed should be optimized to adjust the power distribution of the ICE and battery. Then, the fuel consumption and battery SOC fluctuation can be reduced.
A 12 kW petrol ICE is used in this paper, and the fuel consumption map of ICE is shown in Figure 12. The optimal operating curve is a curve formed by connecting the speed and torque points corresponding to the minimum fuel consumption rate of each output power, and ICE speed in the optimal operating curve can be roughly expressed as a quadratic function of ICE torque [27], as shown in the red line in Figure 12.
Furthermore, a 30 AH nickel metal hydride (NiMH) battery with a large discharge rate is selected; to improve the performance of the battery pack and prolong its service life, battery SOC should be kept in the efficient working zone as far as possible. In this paper, the SOC maximum value is 0.7 and the SOC minimum value is 0.6.
When the vehicle is running, the pedal-torque reference value will be given; if the battery SOC is within the efficient working zone, the ICE speed can be optimized according to Equation (35) by adjusting the power supply frequency of the converter to reduce fuel consumption, unless the speed difference is too small to obtain the desired torque within the sinusoidal steady-state solution range. Therefore, the speed difference should be maintained above , as according to Figure 5.
In addition, a PI controller is used to restrain battery SOC fluctuation. PI controller input is the difference between the reference SOC value and actual SOC value; output is the ICE speed adjustment nice-soc. When the actual SOC value is higher than the reference SOC value, the ICE speed adjustment is reduced to increase the battery output power and, thus, reduce the SOC. When the actual SOC value is lower than the reference SOC value, the ICE speed adjustment is increased to reduce the battery output and, thus, increase the SOC.
Therefore, with the goal of reducing fuel consumption and SOC fluctuation, an ICE speed optimization strategy that can be applied online is proposed, and the flowchart is shown in Figure 13.
7. Simulation Experiments
As shown in Figure 14, an EREV powertrain system based on CRPM-DFM was built in MATLAB/Simulink to verify the driving performance and fuel economy of the powertrain system. The simulation platform consisted of a driver model, a control unit, an ICE model, a CRPM-DFM model, a battery model and a longitudinal vehicle dynamics model. Where the CRPM-DFM control strategy is shown in Figure 9 and ICE speed optimization strategy is mentioned in Section 6, the CRPM-DFM model is a mathematical model according to Equation (10), and the parameters are shown in Table A1, and ICE model is a fuel consumption map, which is shown in Figure 12. The requested pedal torque is the output of the driver model, and the requested torque is distributed to the ICE and control machine in proportion to the pole pairs. After that, the reference value of the voltage of the control-machine stator can be obtained by the CRPM-DFM control strategy, and according to the machine speed, SOC and the reference value of ICE torque, the reference value of ICE speed can be obtained by the ICE speed optimization strategy. In addition, the main parameters of EREVs are shown in Table A2.
7.1. Driving Performance Verification of the Powertrain System Based on CRPM-DFM
Abundant simulation tests were applied to validate the driving performance of the powertrain system under some typical driving cycles. Figure 15 and Figure 16 are the simulation results under the UDDS driving cycle. It can be observed that the powertrain system based on CRPM-DFM is able to achieve the required speed, showing satisfactory driving performance, which also verifies the effectiveness of the CRPM-DFM control strategy. The ICE speed can be adjusted independently of load variations, but when the battery SOC is less than 0.65, the ICE speed needs to be properly increased to charge the battery; then, the SOC fluctuations will be reduced. In addition, the actual torque value of ICE obtained by Equation (10) is approximately equal to the theoretical torque value of ICE obtained by Equation (5), which verifies the accuracy of the torque distribution of CRPM-DFM discussed in Section 2.1.
The SOC, power, voltage and current waveforms are shown in Figure 16, and the CRPM-DFM operates within the sinusoidal steady-state solution. As an auxiliary power unit, the average output power of ICE is less than that of the battery, which accords with the characteristics of the EREVs. Besides, the SOC is limited to 0.6–0.7, which verifies the effectiveness of the ICE speed optimization strategy.
7.2. Fuel Economy Verification of the Powertrain System Based on CRPM-DFM
To verify the fuel economy of the CRPM-DFM powertrain system, the fuel consumption of EREVs and conventional-engine vehicles is compared under some typical driving cycles. In the calculation of fuel consumption, not only is the fuel consumption of the ICE considered, but also the charge deviation of the battery is converted into corresponding equivalent fuel consumption. The equivalent fuel consumption can be obtained:
where is total battery energy (J), is fuel low heating value, is oil-electric conversion efficiency, and are the initial value and final value of the SOC, respectively, is the ICE fuel consumption and is the total fuel consumption of the vehicle.
Data of the ICE working points of EREVs are collected every 1 s, and then the ICE working points under different driving cycles are shown in the yellow points in Figure 17. Affected by the speed difference and battery SOC, a small number of operating points of ICE will deviate from the optimal operating curve, but most of the ICE operating points are near the optimal operating curve.
Fuel consumption of EREVs and conventional-engine vehicles is shown in Table 1, and it can be seen that under different driving cycles, the average oil-saving rate of EREVs is 50%, so the EREVs have better fuel economy.
8. Conclusions
For the coupling devices of new-energy vehicles, there are three kinds: torque coupling, speed coupling and power coupling. The complexity is increased in turn, and the fuel saving rate is also better in turn. The most prominent is the power coupling device of the two motors and mechanical planetary gear of the Prius, which can realize power coupling. The dynamic coupling device of CRPM-DFM discussed in this paper is similar to the planetary gear mechanism, which can realize the speed coupling, but there is no mechanical mechanism, and the generator and motor are integrated into one. The CRPM-DFM has high efficiency and no slip ring, and its characteristics of small size and simple structure make it suitable for the application of a vehicle’s hybrid power system.
In this paper, the mathematical model of CRPM-DFM is introduced, and a high-performance control method is provided. The lower and upper limits of output torque with a sinusoidal steady-state solution and the relationship between the limits and the design parameters and operation parameters of CRPM-DFM are analyzed. To improve the efficiency of CRPM-DFM, the control strategy of maximum-torque-per-unit current is given in this paper. These results are of great significance for the application and body design of CRPM-DFM.
Obviously, the results of modeling, control method and driving characteristics of CRPM-DFM presented in this paper are not limited to the application of this paper, and the design scheme of the dynamic coupling device presented in this paper is not unique. Changes can be made in the motor-body structure and transmission mechanism design; for example, the positions of permanent-magnet stator and wound stator can be reciprocal. The motor output shaft can be equipped with a clutch to become a dual clutch design, and the output shaft can also be coupled with a motor to achieve power-coupling control, etc. These contents need to be developed in combination with the specific control requirements and drive requirements of vehicles in further research.
Author Contributions
Conceptualization, C.X.; methodology, C.X., J.B. and J.S.; software, J.B.; validation, C.X. and J.B.; formal analysis, C.X.; investigation, C.X.; resources, C.X.; data curation, C.X.; writing—original draft preparation, C.X. and J.B.; writing—review and editing, C.X. and J.B.; visualization, J.B.; supervision, C.X.; project administration, C.X.; funding acquisition, C.X. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| , | mechanical speeds of cup rotor and the permanent-magnet stator |
| , | idle speed and maximum speed of the internal combustion engine |
| , | mechanical angular speed of cup rotor and the permanent-magnet stator |
| frequency of the converter | |
| , | slip angle and the rotation angle of the permanent magnet relative to the cup rotor |
| , | cup-rotor angle and permanent-magnet angle |
| number of pole pairs | |
| plural form (real form) of voltage | |
| plural form (real form) of current | |
| plural form (real form) of flux | |
| resistance | |
| inductance | |
| mutual inductance | |
| , , | electromagnetic torque, load torque and rated torque |
| rotational inertia | |
| Im | imaginary part |
| unit imaginary | |
| rated power |
Superscripts
| NS | N pole axis and S pole axis of the permanent magnet |
| ABC | static stator three-phase coordinate system |
| αβ | static stator two-phase coordinate system |
| abc | rotor three-phase coordinate system |
| dq | rotor coordinate system |
| mt | synchronous coordinate system |
| — | conjugate operation |
| ’ | negative conjugate operation |
| . | derivative of time |
| * | reference value |
| | | | amplitude |
Subscripts
| p | power machine |
| c | control machine |
| s | stator |
| r | rotor |
| f | permanent magnet |
| b | per-unit value |
| ice | internal combustion engine |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Parameters of CRPM-DFM.
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| /kW | 20 | /H | 0.0031/0.0002 |
| / | 54 | /H | 0.003 |
| / | 0.02 | /Wb | 0.2 |
| / | 0.01/0.01 | 3/1 | |
| /H | 0.0031 | / | 0.2 |
Table A2.
The key parameters of EREVs.
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Battery pack | 30 Ah/308 V | Tire radius | 0.33 m |
| Total body mass | 1000 kg | Drag coefficient | 0.3 |
| Frontal area | 1.746 m2 | Rolling coefficient | 0.009 |
| ICE power | 12 kW | CRPM-DFM power | 20 kW |
References
- Liu, Z.E.; Hao, H.; Cheng, X.; Zhao, F.Q. Critical issues of energy efficient and new energy vehicles development in China. Energy Policy 2018, 115, 92–97. [Google Scholar] [CrossRef]
- Husain, I.; Ozpineci, B.; Islam, M.S.; Gurpinar, E.; Su, G.J.; Yu, W.; Chowdhury, S.; Xue, L.; Rahman, D.; Sahu, R. Drive Technology Trends, Challenges, and Opportunities for Future Electric Vehicles. Proc. IEEE 2021, 109, 1039–1059. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Calderon-Najera, J.D.; Ramirez-Mendoza, R.A. A Systematic Review of Technologies, Control Methods, and Optimization for Extended-Range Electric Vehicles. Appl. Sci. 2021, 11, 7095. [Google Scholar] [CrossRef]
- Aharon, I.; Kuperman, A. Topological Overview of Powertrains for Battery-Powered Vehicles with Range Extender. IEEE Trans. Power Electron. 2006, 26, 868–876. [Google Scholar] [CrossRef]
- Niu, S.X.; HO, S.L.; Fu, W.N. Design of a Novel Electrical Continuously Variable Transmission System Based on Harmonic Spectra Analysis of Magnetic Field. IEEE Trans. Magn. 2013, 49, 2161–2164. [Google Scholar] [CrossRef]
- Wang, Y.N.; Meng, B.M.; Shen, Y.P. Researches on Power Systems of Extended Range Electric Vehicles. Proc. Chin. Soc. Electr. Eng. 2014, 34, 4629–4639. [Google Scholar]
- Zhang, Z.; Yu, L.; Dai, C.; Yan, Y. Investigation and development of a new brushless DC generator system for extended-range electric vehicle application. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014; pp. 3155–3162. [Google Scholar]
- Rahman, K.M.; Jurkovic, S.; Stancu, C.; Morgante, J.; Savagian, P.J. Design and Performance of Electrical Propulsion System of Extended Range Electric Vehicle (EREV) Chevrolet Volt. IEEE Trans. Ind. Appl. 2015, 51, 2479–2488. [Google Scholar] [CrossRef]
- Zhou, S.; Niu, J.G.; Chen, F.X.; Fei, F.L. A Study on Powertrain Design and Simulation for Range-extended Electric Vehicle. Automot. Eng. 2011, 33, 924–929. [Google Scholar]
- Shi, L.; Guo, Y.; Xiao, D.; Han, Z.; Zhou, X. Design, Optimization, and Study of a Rare-Earth Permanent-Magnet Generator with New Consequent-Pole Rotor for Extended-Range Electric Vehicle. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 917–923. [Google Scholar] [CrossRef]
- Zhou, L.K.; Hua, W.; Cheng, M. Analysis and optimization of key dimensions of co-axial dual-mechanical-port flux-switching permanent magnet machines for fuel-based extended range electric vehicles. CES Trans. Electr. Mach. Syst. 2017, 1, 292–299. [Google Scholar] [CrossRef]
- Zhou, L.; Hua, W.; Wu, Z.; Zhu, X.; Yin, F. Analysis of coupling between two sub-machines in co-axis dual-mechanical-port flux-switching PM machine for fuel-based extended range electric vehicles. IET Electr. Power Appl. 2019, 13, 48–56. [Google Scholar] [CrossRef]
- Zhou, L.K.; Hua, W. Influences of Stator Teeth Number on PM Coupling Levels of Co-Axial Dual- Mechanical-Port Flux-Switching PM Machines. IEEE Trans. Magn. 2019, 55, 8104007. [Google Scholar] [CrossRef]
- Zhou, L.K.; Hua, W.; Zhang, G. Power distribution of a co-axial dual-mechanical-port flux-switching permanent magnet machine for fuel-based extended range electric vehicles. AIP Adv. 2017, 7, 056638. [Google Scholar] [CrossRef] [Green Version]
- Xiang, Z.; Quan, L.; Zong, Z.; Gu, Y.; Yin, J. Alternative stator for new brushless dual-rotor flux-switching permanent magnet motor for extended range electric vehicles. In Proceedings of the 17th IEEE International Conference on Electrical Machines and Systems, Hangzhou, China, 22–25 October 2014; pp. 212–217. [Google Scholar]
- Xiang, Z.; Quan, L.; Zhu, X.; Wang, L. A Brushless Double Mechanical Port Permanent Magnet Motor for Plug-In HEVs. IEEE Trans. Magn. 2015, 51, 8111104. [Google Scholar] [CrossRef]
- Han, P.; Cheng, M.; Chen, Z. Dual-Electrical-Port Control of Cascaded Doubly-Fed Induction Machine for EV/HEV Applications. IEEE Trans. Ind. Appl. 2017, 53, 1390–1398. [Google Scholar] [CrossRef]
- Shi, G.K.; Zhao, H.; Feng, Q. A Study on Hybrid Power System with Double Rotor Motor. Automot. Eng. 2007, 29, 97–100. [Google Scholar]
- Ju, X.W.; Cheng, Y.; Zhao, T.X.; Cui, S.M. Torque characteristic analysis of a novel brushless dual rotor machine for hybrid electric vehicles. In Proceedings of the 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 4365–4370. [Google Scholar]
- Li, L.B.; Chen, P.; Shi, G.K.; Wang, H. Modeling and simulation of double-rotor motor applied to the system of hybrid electric vehicle. Electr. Mach. Control 2008, 12, 403–408. [Google Scholar]
- Xia, C.Y.; Shi, J.N. Feedback Linearization and Maximum Torque per Ampere Control Methods of Cup Rotor Permanent-Magnet Doubly Fed Machine. Energies 2021, 14, 6402. [Google Scholar]
- Xia, C.Y.; Hou, X.X. Study on the Static Load Capacity and Synthetic Vector Direct Torque Control of Brushless Doubly Fed Machines. Energies 2016, 9, 966. [Google Scholar] [CrossRef] [Green Version]
- Zhou, D.; Spee, R.; Alexander, G.C. Experimental evaluation of a rotor flux oriented control algorithm for brushless doubly-fed machines. IEEE Trans. Power Electron. 1997, 12, 72–78. [Google Scholar] [CrossRef]
- Shao, S.; Abdi, E.; Barati, F.; McMahon, R. Stator-Flux-Oriented Vector Control for Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2009, 56, 4220–4228. [Google Scholar] [CrossRef]
- Xia, C.Y.; Guo, H.Y. Feedback linearization control approach for brushless doubly-fed machine. Int. J. Precis. Eng. Manuf. 2015, 8, 1699–1709. [Google Scholar] [CrossRef]
- Mosaddegh, H.; Zarchi, H.A.; Markadeh, G.A. Stator flux oriented control of brushless doubly fed induction motor drives based on maximum torque per total ampere strategy. In Proceedings of the 2019 10th International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz, Iran, 12–14 February 2019; pp. 84–89. [Google Scholar]
- Cui, S. MATLAB Based Vehicle Engineering Simulation Example, 5th ed.; Chemical Industrial Press: Beijing, China, 2020; pp. 4–15. [Google Scholar]
Figure 1.
Structure diagram of the powertrain system of EREVs.

Figure 2.
Construction of CRPM-DFM and structure diagram of the powertrain system. (a) Construction of CRPM-DFM; (b) structure diagram of the powertrain system based on CRPM-DFM.
Figure 2.
Construction of CRPM-DFM and structure diagram of the powertrain system. (a) Construction of CRPM-DFM; (b) structure diagram of the powertrain system based on CRPM-DFM.
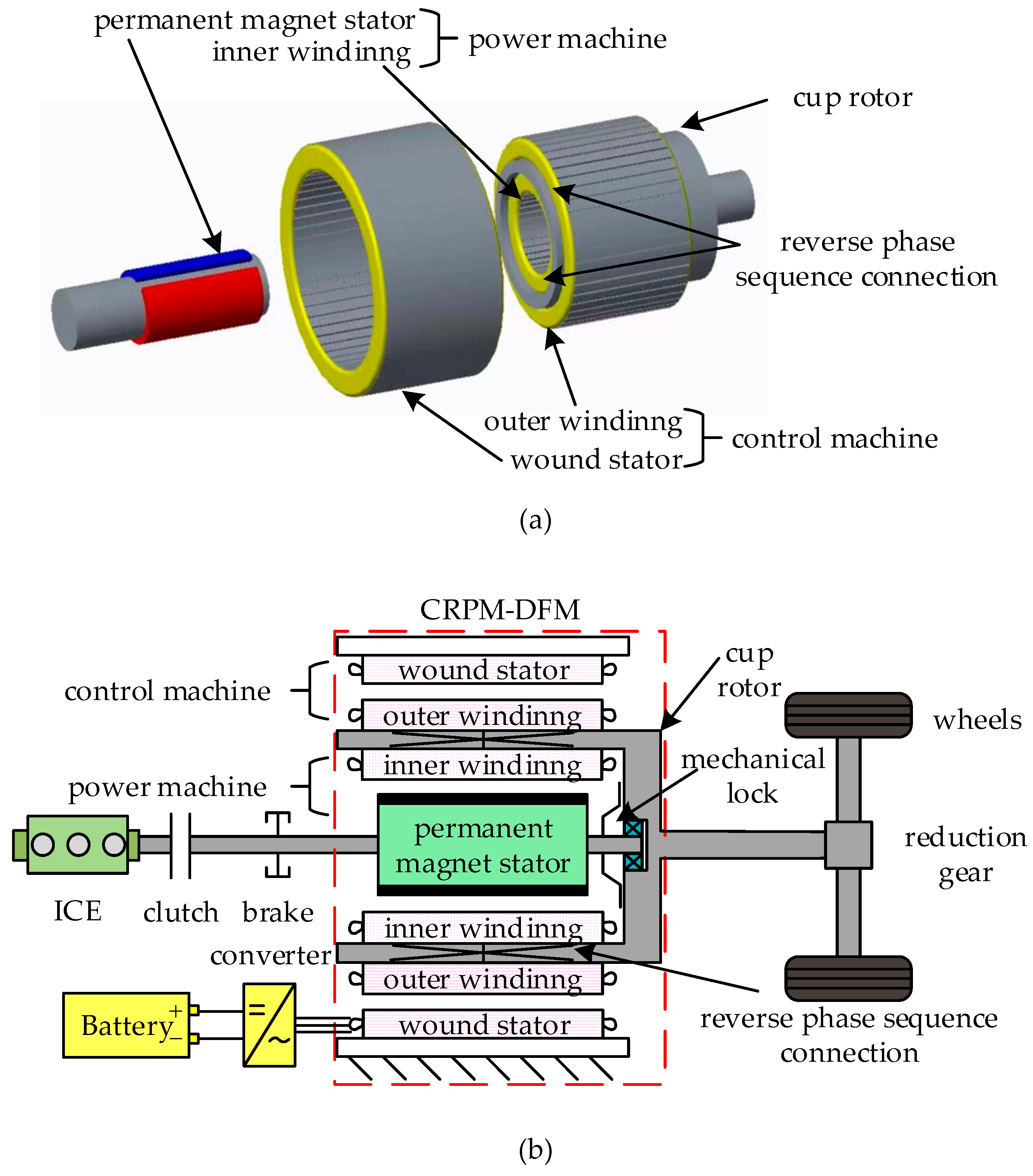
Figure 3.
The relationship between the coordinate systems: (a) the relationship between the static stator three-phase coordinate system, the static stator two-phase coordinate system and the rotor dq coordinate system; (b) the relationship between the rotor dq coordinate system and the rotor three-phase coordinate system; (c) the relationship between the rotor dq coordinate system and the synchronous mt coordinate system.
Figure 3.
The relationship between the coordinate systems: (a) the relationship between the static stator three-phase coordinate system, the static stator two-phase coordinate system and the rotor dq coordinate system; (b) the relationship between the rotor dq coordinate system and the rotor three-phase coordinate system; (c) the relationship between the rotor dq coordinate system and the synchronous mt coordinate system.

Figure 4.
The response waveforms of CRPM-DFM when the non-sinusoidal steady-state solution or sinusoidal steady-state solution exists. (a) When the non-sinusoidal steady-state solution exists. (b) When the sinusoidal steady-state solution exists.
Figure 4.
The response waveforms of CRPM-DFM when the non-sinusoidal steady-state solution or sinusoidal steady-state solution exists. (a) When the non-sinusoidal steady-state solution exists. (b) When the sinusoidal steady-state solution exists.

Figure 5.
The upper and lower boundaries of load torque.

Figure 6.
Influence of rotor flux and the speed difference on the load torque boundary. (a) Influence of rotor flux when . (b) Influence of rotor flux when . (c) Influence of the speed difference.
Figure 6.
Influence of rotor flux and the speed difference on the load torque boundary. (a) Influence of rotor flux when . (b) Influence of rotor flux when . (c) Influence of the speed difference.

Figure 7.
The reference value of rotor flux. (a) The reference value of rotor flux when the speed difference is negative. (b) The reference value of rotor flux when the speed difference is positive.
Figure 7.
The reference value of rotor flux. (a) The reference value of rotor flux when the speed difference is negative. (b) The reference value of rotor flux when the speed difference is positive.

Figure 8.
The reference value of rotor flux. (a) The relationship of the rotor flux with torque when . (b) The relationship of the rotor flux with torque when . (c) The relationship of the rotor flux with speed difference when . (d) The relationship of the rotor flux with speed difference when .
Figure 8.
The reference value of rotor flux. (a) The relationship of the rotor flux with torque when . (b) The relationship of the rotor flux with torque when . (c) The relationship of the rotor flux with speed difference when . (d) The relationship of the rotor flux with speed difference when .

Figure 9.
The control block diagram of CRPM-DFM.

Figure 10.
Simulation results: (a) simulation results of MTPA control; (b) simulation results of constant control.
Figure 10.
Simulation results: (a) simulation results of MTPA control; (b) simulation results of constant control.

Figure 11.
Efficiency maps of CRPM-DFM: (a) in hybrid driving mode; (b) in pure electric driving mode; (c) in parking charging mode; (d) in regenerative braking mode.
Figure 11.
Efficiency maps of CRPM-DFM: (a) in hybrid driving mode; (b) in pure electric driving mode; (c) in parking charging mode; (d) in regenerative braking mode.

Figure 12.
Specific fuel consumption map of the ICE.

Figure 13.
Flowchart of the ICE speed optimization strategy.

Figure 14.
The system block diagram of EREV system based on CRPM-DFM.

Figure 15.
The torque and speed waveforms during the UDDS driving cycle: (a) the torque and speed waveforms of CRPM-DFM; (b) the torque and speed waveforms of ICE.
Figure 15.
The torque and speed waveforms during the UDDS driving cycle: (a) the torque and speed waveforms of CRPM-DFM; (b) the torque and speed waveforms of ICE.

Figure 16.
The SOC, power, current and voltage waveforms during the UDDS driving cycle: (a) the SOC waveform of battery; (b) the power waveforms of ICE and battery; (c) the current and voltage waveforms of CRPM-DFM.
Figure 16.
The SOC, power, current and voltage waveforms during the UDDS driving cycle: (a) the SOC waveform of battery; (b) the power waveforms of ICE and battery; (c) the current and voltage waveforms of CRPM-DFM.

Figure 17.
ICE operating points of EREVs under different driving cycles.

Table 1.
Fuel consumption results of different driving cycles (L/100 km).
| Drive Cycle | Engine Vehicle | EREVs | Oil Saving Rate % |
|---|---|---|---|
| HWY | 3.831 | 1.985 | 48.2 |
| US06 | 4.174 | 2.126 | 49.1 |
| UDDS | 4.516 | 2.298 | 49.1 |
| SC03 | 4.643 | 2.358 | 49.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Xia, C.; Bi, J.; Shi, J. Investigation of a Cup-Rotor Permanent-Magnet Doubly Fed Machine for Extended-Range Electric Vehicles. Energies 2023, 16, 2455. https://doi.org/10.3390/en16052455
AMA Style
Xia C, Bi J, Shi J. Investigation of a Cup-Rotor Permanent-Magnet Doubly Fed Machine for Extended-Range Electric Vehicles. Energies. 2023; 16(5):2455. https://doi.org/10.3390/en16052455
Chicago/Turabian StyleXia, Chaoying, Jiaxiang Bi, and Jianning Shi. 2023. "Investigation of a Cup-Rotor Permanent-Magnet Doubly Fed Machine for Extended-Range Electric Vehicles" Energies 16, no. 5: 2455. https://doi.org/10.3390/en16052455
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.