A Fuzzy Logic Global Power Management Strategy for Hybrid Electric Vehicles Based on a Permanent Magnet Electric Variable Transmission

Abstract
:1. Introduction
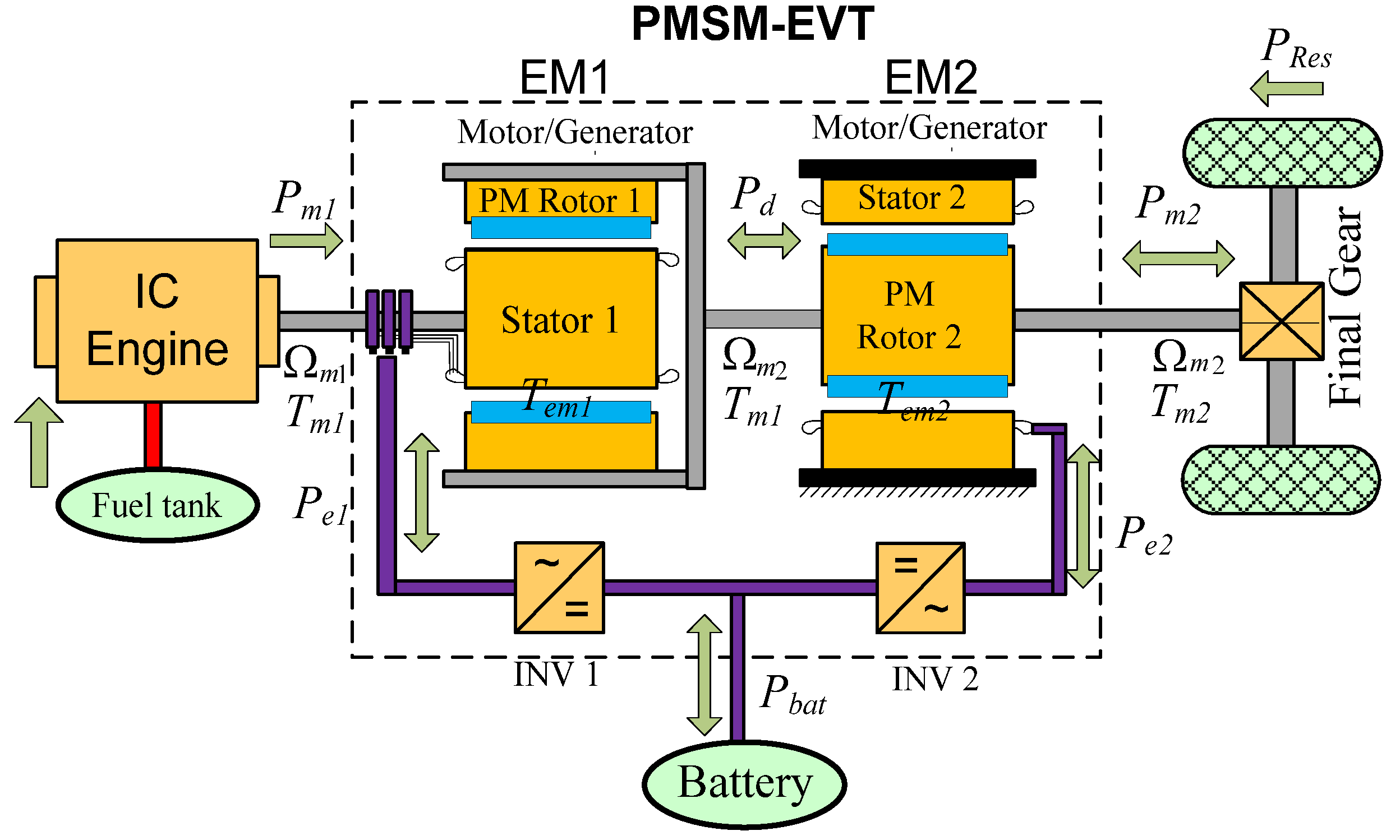
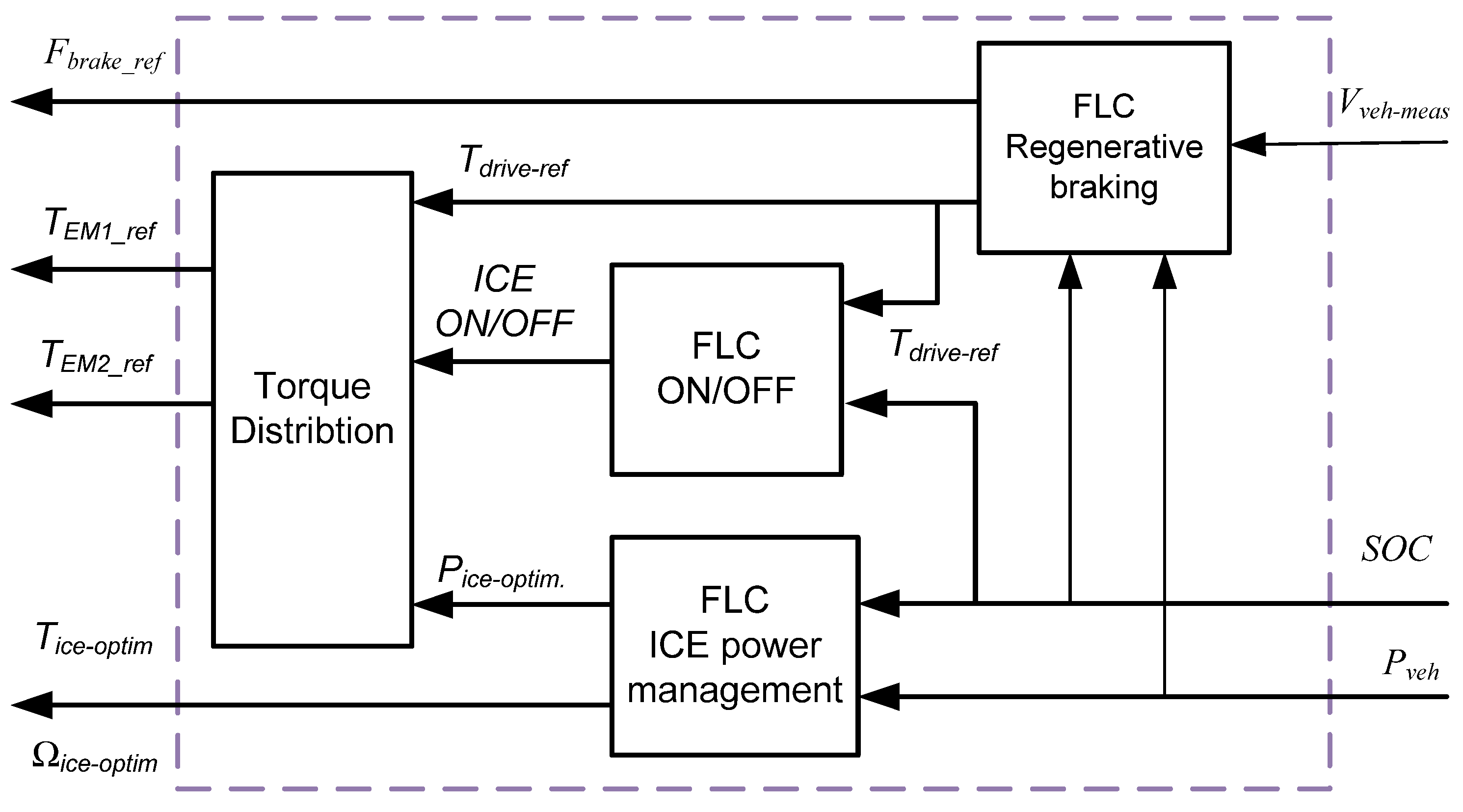
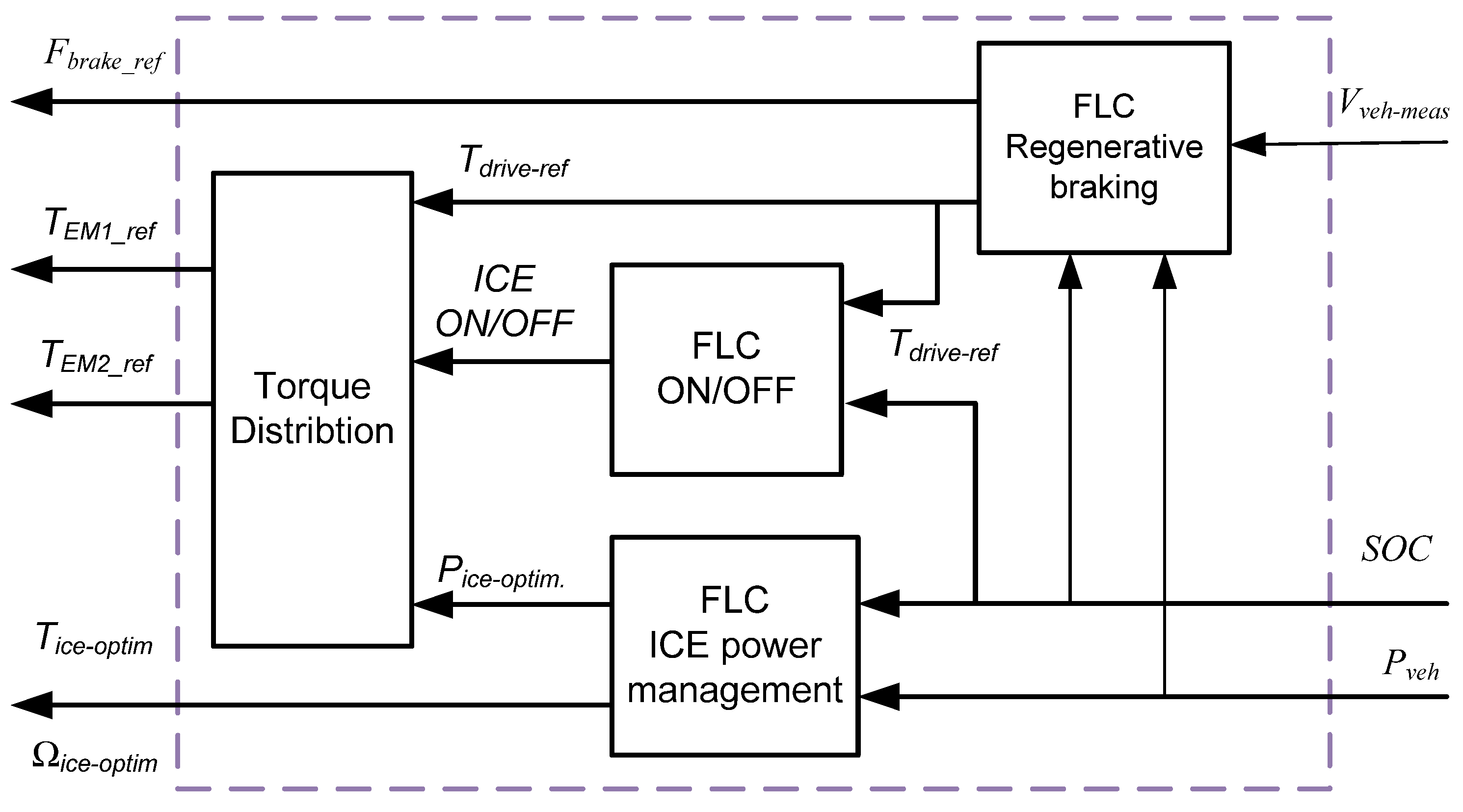
2. Fuzzy Logic Global Power Management Strategy
2.1. Implementation of Regenerative Braking Fuzzy Logic Control Strategy
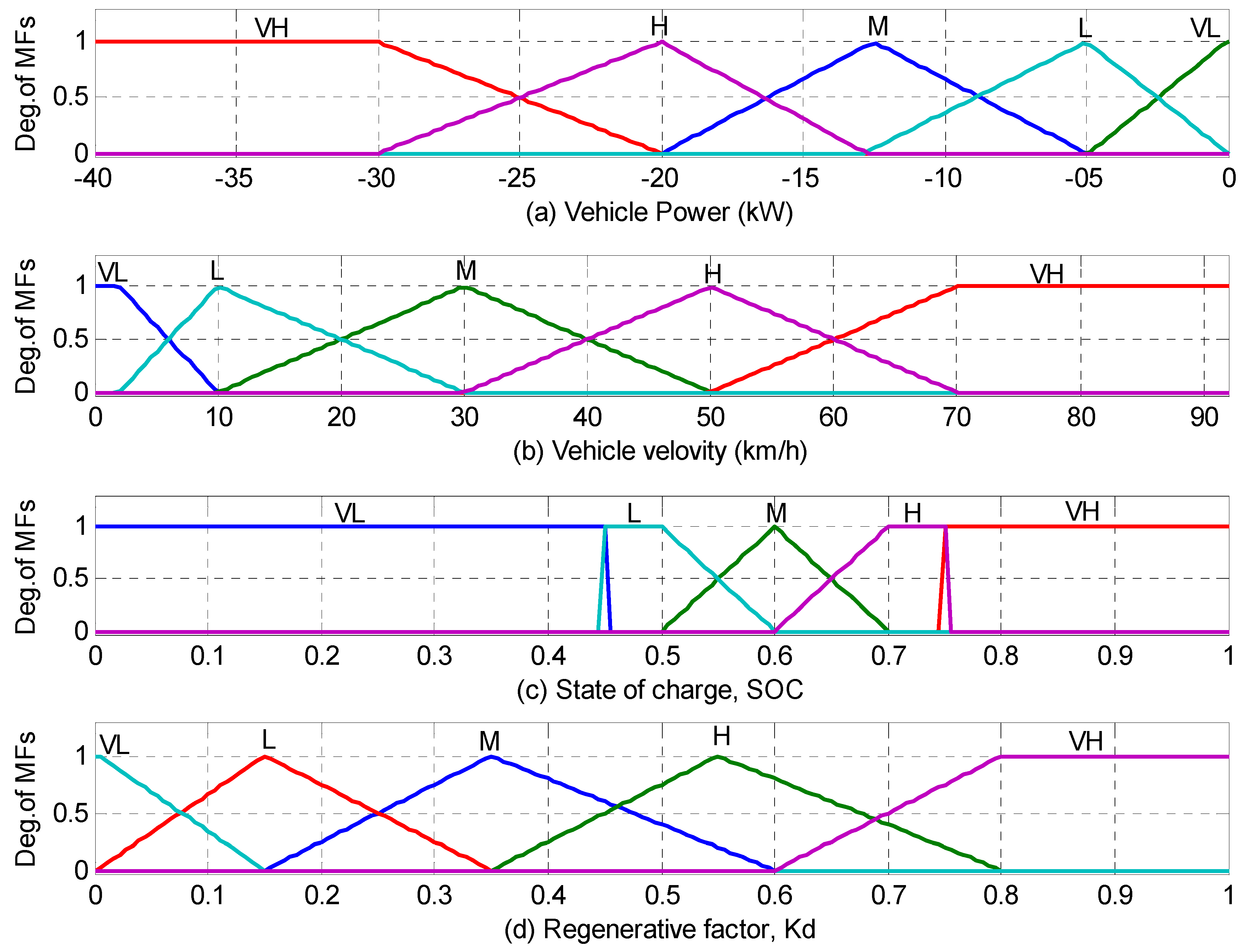
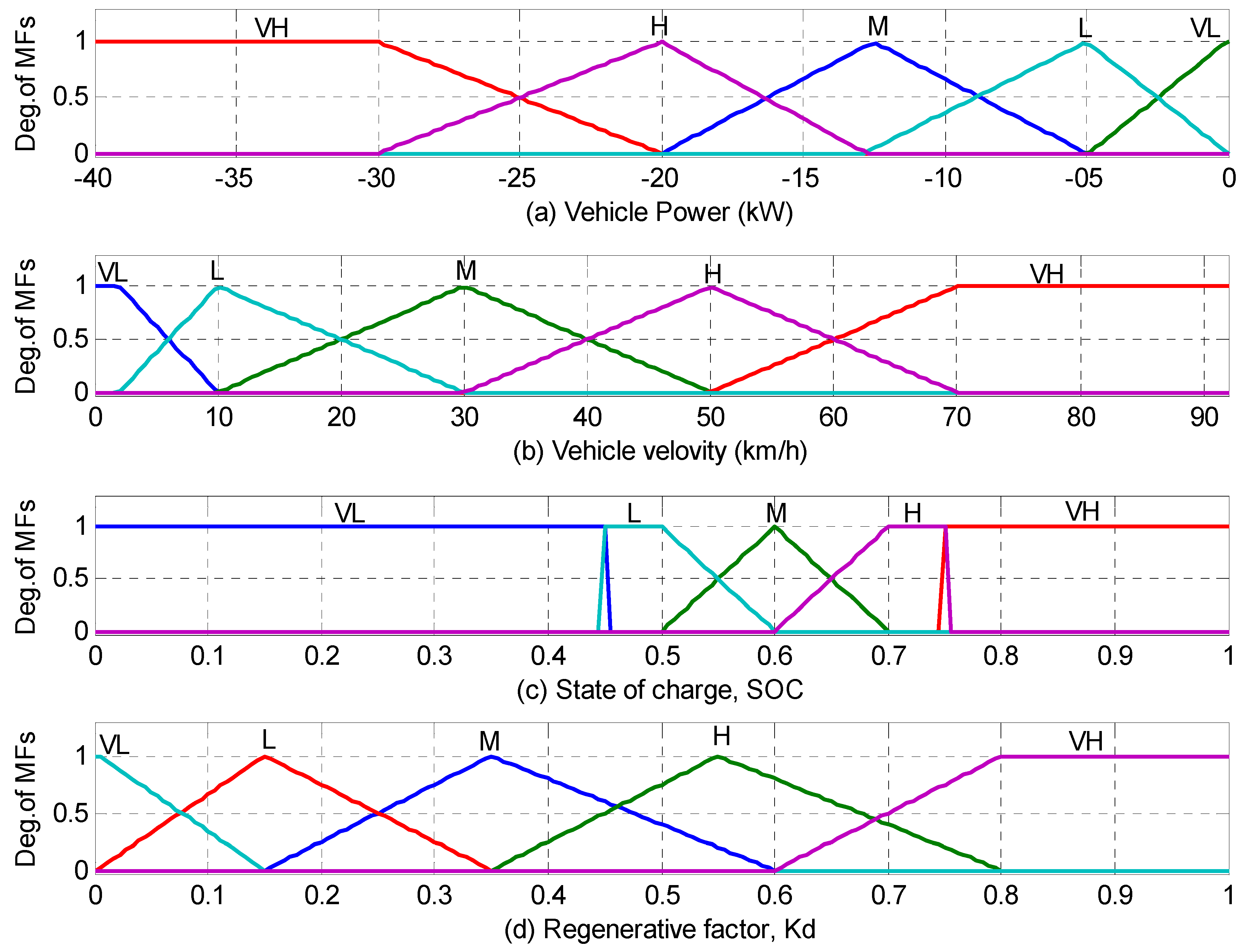
2.1.1. Input/Output Membership Functions
2.1.2. Fuzzy Logic Rules
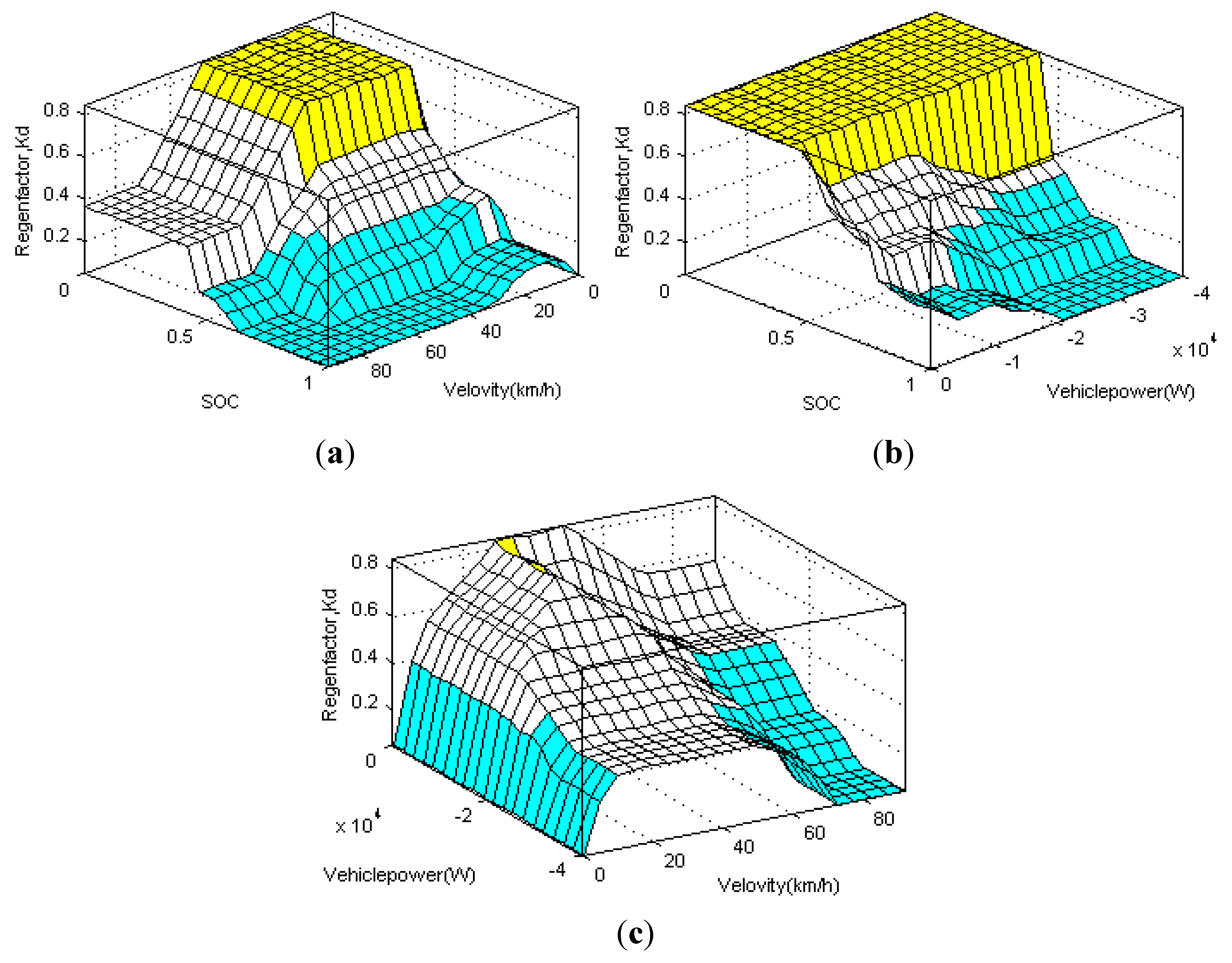
- If SOC is very high (VH), i.e.,, the engine is turned OFF and is very low (VL) i.e., (no regenerating power required from the EVT machines) whatever the velocity and stored braking power are, see Figure 4a,b.
- If SOC is (VL), i.e., , the engine is turned ON and is VH i.e., (maximum power is recovered from the braking power via the EM2 machine and no friction braking), this for all velocities and for all stored braking power except two cases: The first exception is when the vehicle runs at very low velocity, has to be decreased because it is not preferable to operate the EVT machines as generators at very low speeds; the second exception is when the vehicle runs at very high speed, has to be changed from H to VL gradually according to the SOC and the braking power, see Figure 4a,b.
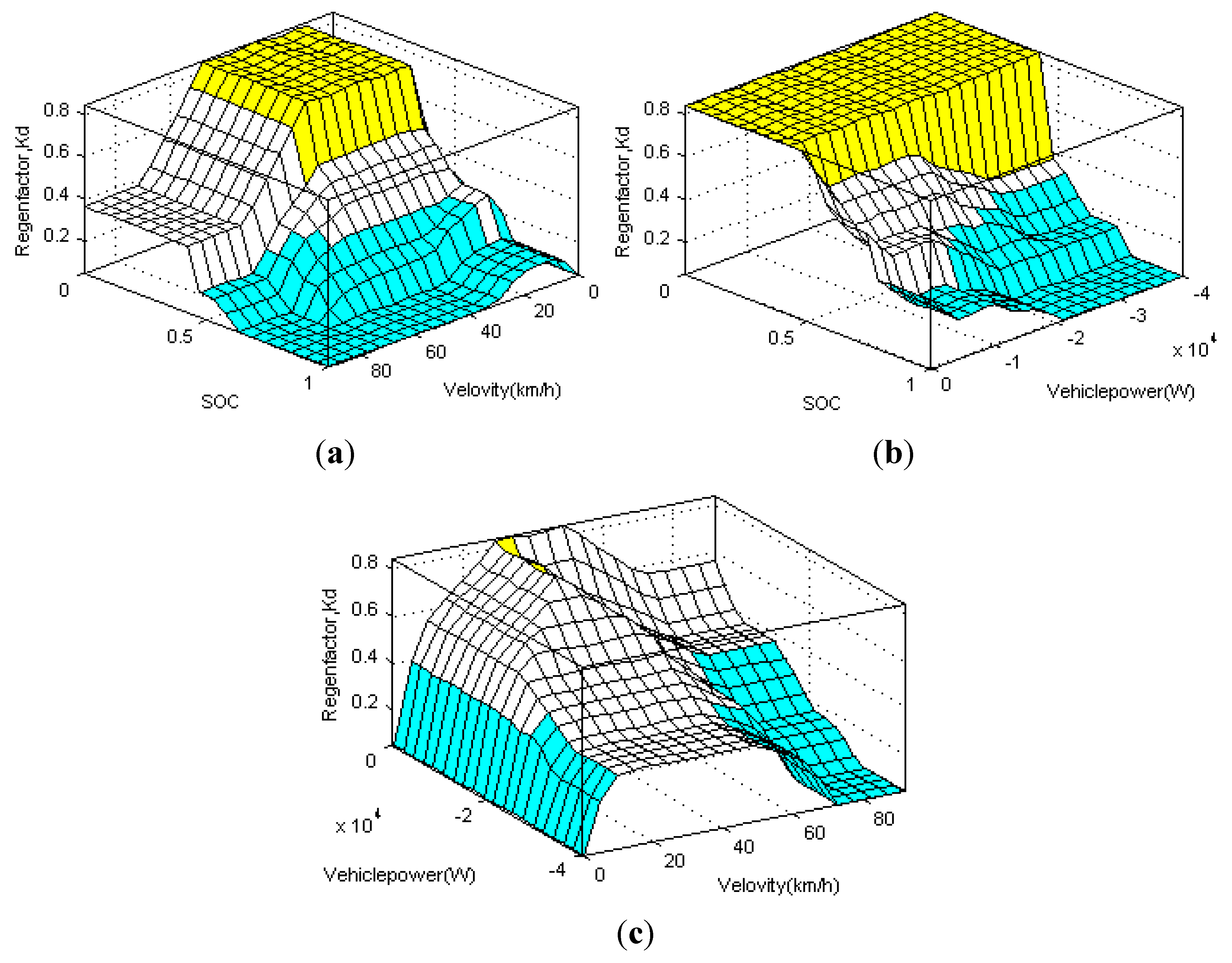
- At all SOC, when the vehicle velocity increases, the regenerative torque of EM2 decreases (i.e., decreases) to save power bounds of the machine as shown in Figure 4a.
- At all SOC, when the braking power increases, the regenerative factor decreases, as shown in Figure 4b.
- At all braking power and all velocities, decreases with the increase of the SOC above the target value, as shown in Figure 4a,b.
- Regardless the SOC, the regenerative factor is designed such that it increases gradually with the increases both of velocity and braking power, as shown in Figure 4c. Maximum factor can be safely obtained at the rated velocity and rated power of EM2.
- At very high velocities, has to be decreased to keep the vehicle more stable while the vehicle is broken. Also has to be decreased when the braking power exceeds the maximum power of EM2, as shown in Figure 4c.
2.2. Implementation of Fuzzy Logic ON/OFF Control Strategy of the ICE
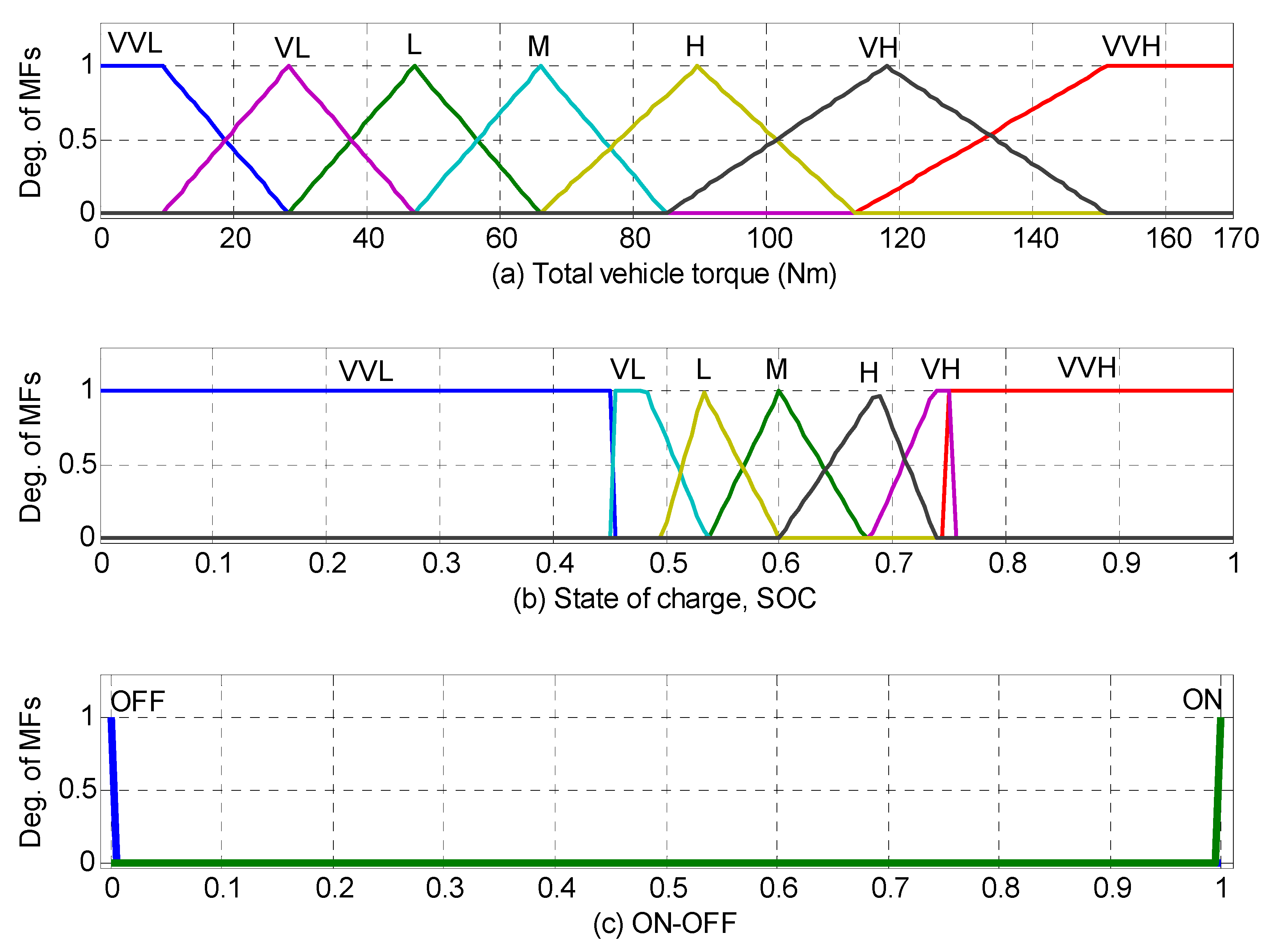
2.2.1. Input/Output Membership Functions
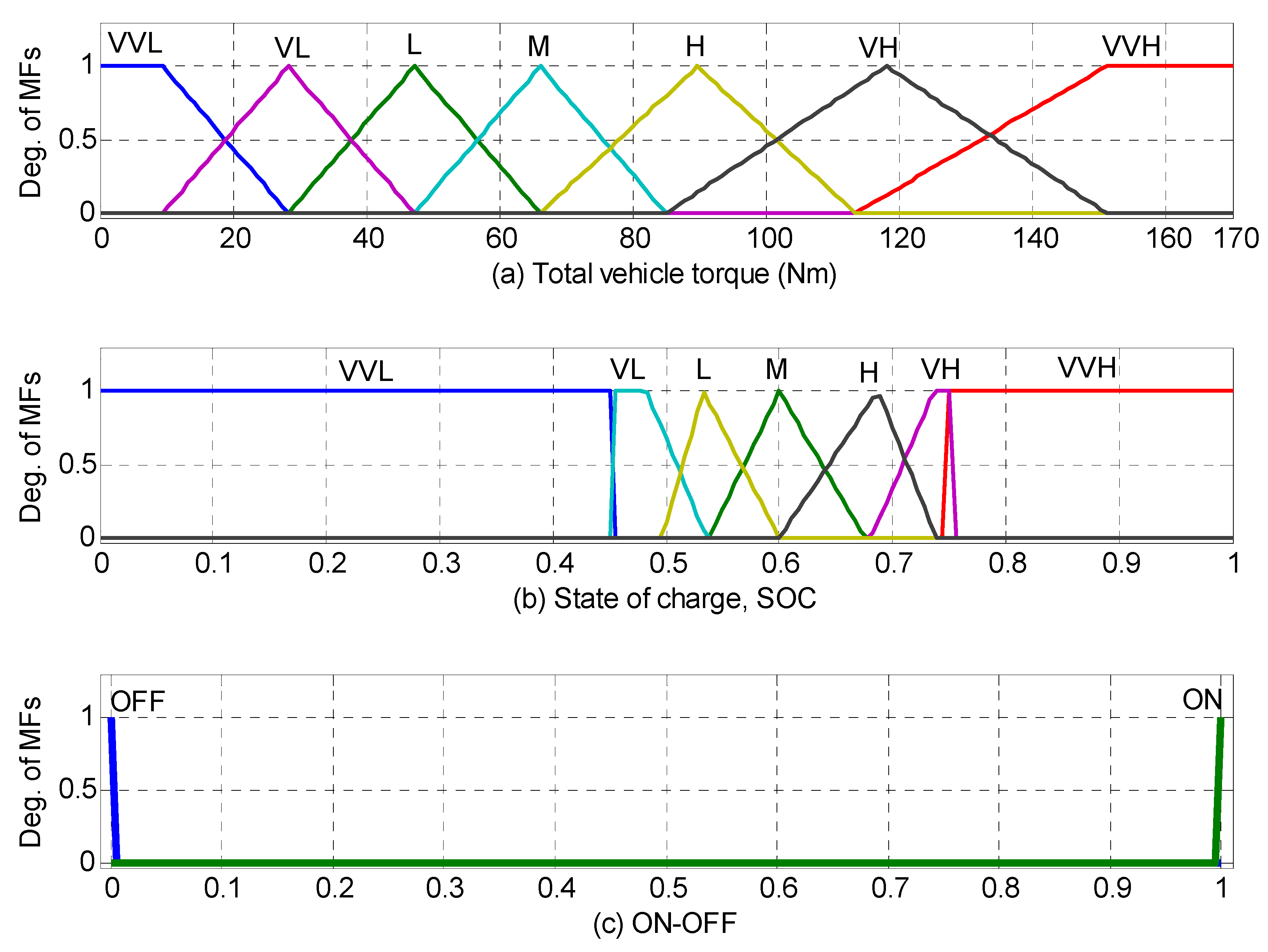
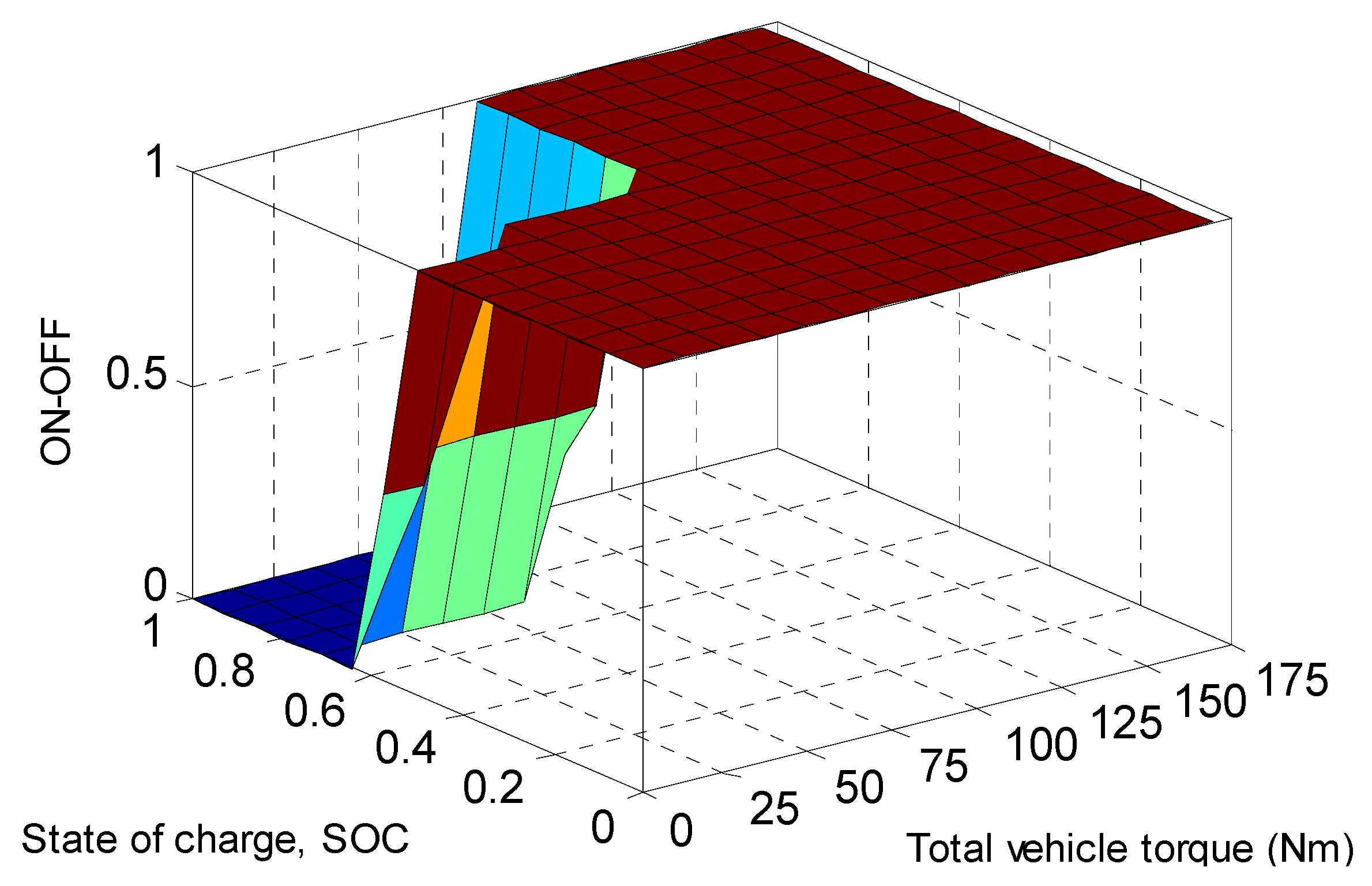
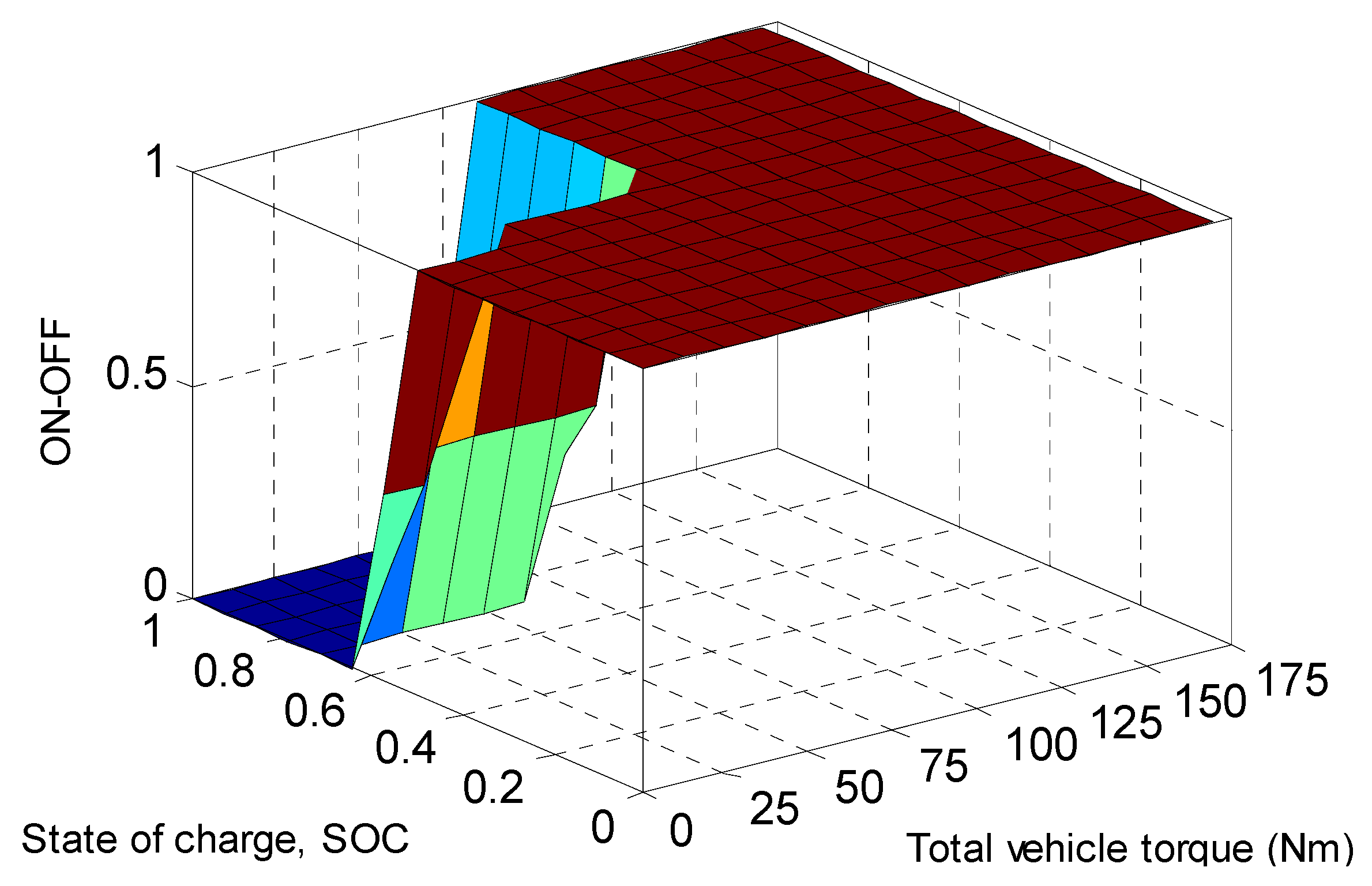
2.2.2. Rule Table for the Fuzzy Logic ON/OFF ICE Controller

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Torque | SOC (State of Charge) | ||||||
|---|---|---|---|---|---|---|---|
| VVL [0–0.45] | VL [0.45–0.53] | L [0.49–0.6] | M [0.53–0.6–0.67] | H [0.6–0.74] | VH [0.68–0.75] | VVH [0.75–1.0] | |
| VVL [0–28] | ON | ON | ON | OFF | OFF | OFF | OFF |
| VL [10–47] | ON | ON | ON | OFF | OFF | OFF | OFF |
| L [28–66] | ON | ON | ON | ON | OFF | OFF | OFF |
| M [47–85] | ON | ON | ON | ON | OFF | OFF | OFF |
| H [66–113] | ON | ON | ON | ON | ON | ON | ON |
| VH [85–150] | ON | ON | ON | ON | ON | ON | ON |
| VVH [113–100] | ON | ON | ON | ON | ON | ON | ON |
2.3. Implementation of ICE Fuzzy Logic Controller
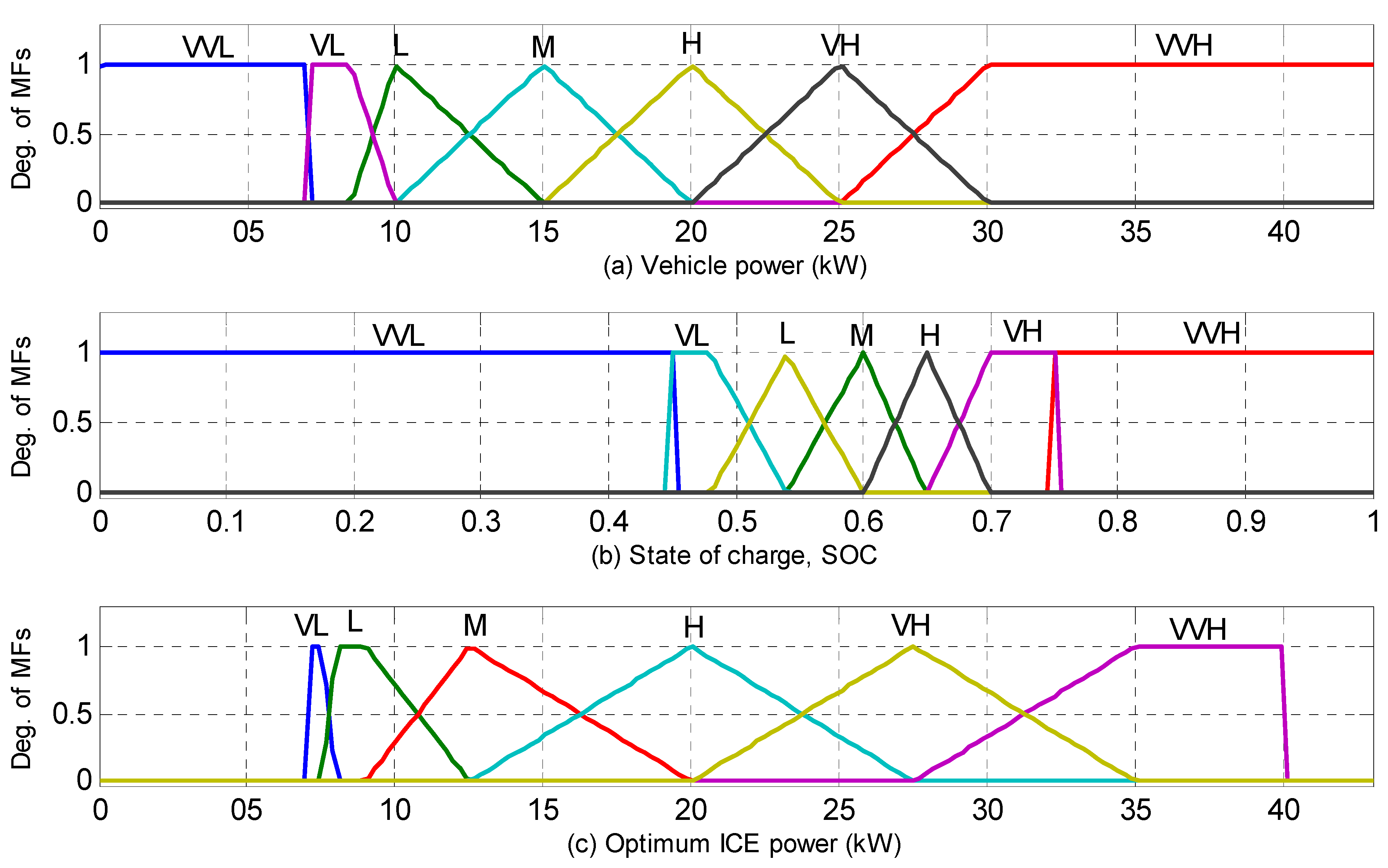
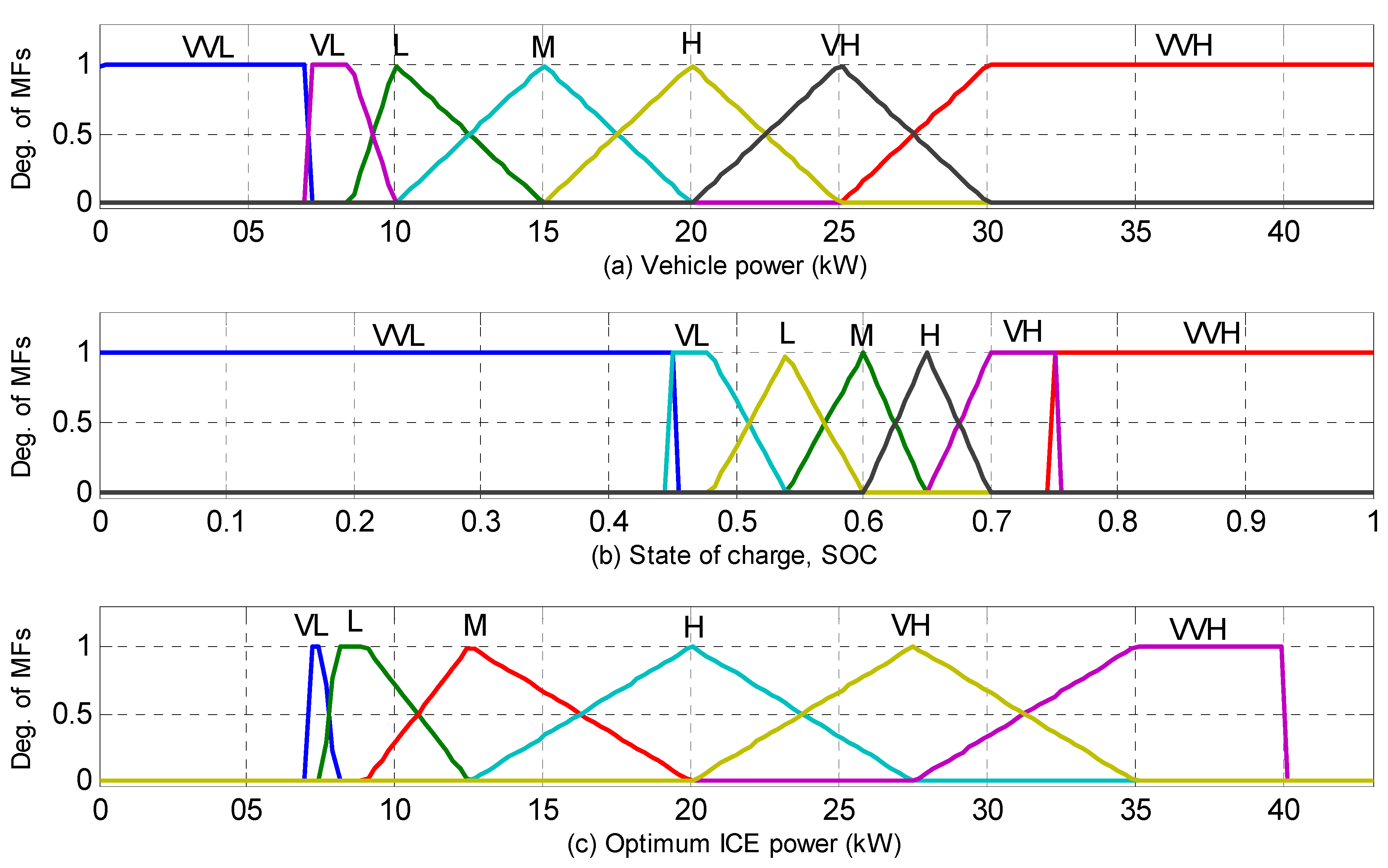
2.3.1. Input/Output Membership Functions
2.3.2. Fuzzy Logic Rules
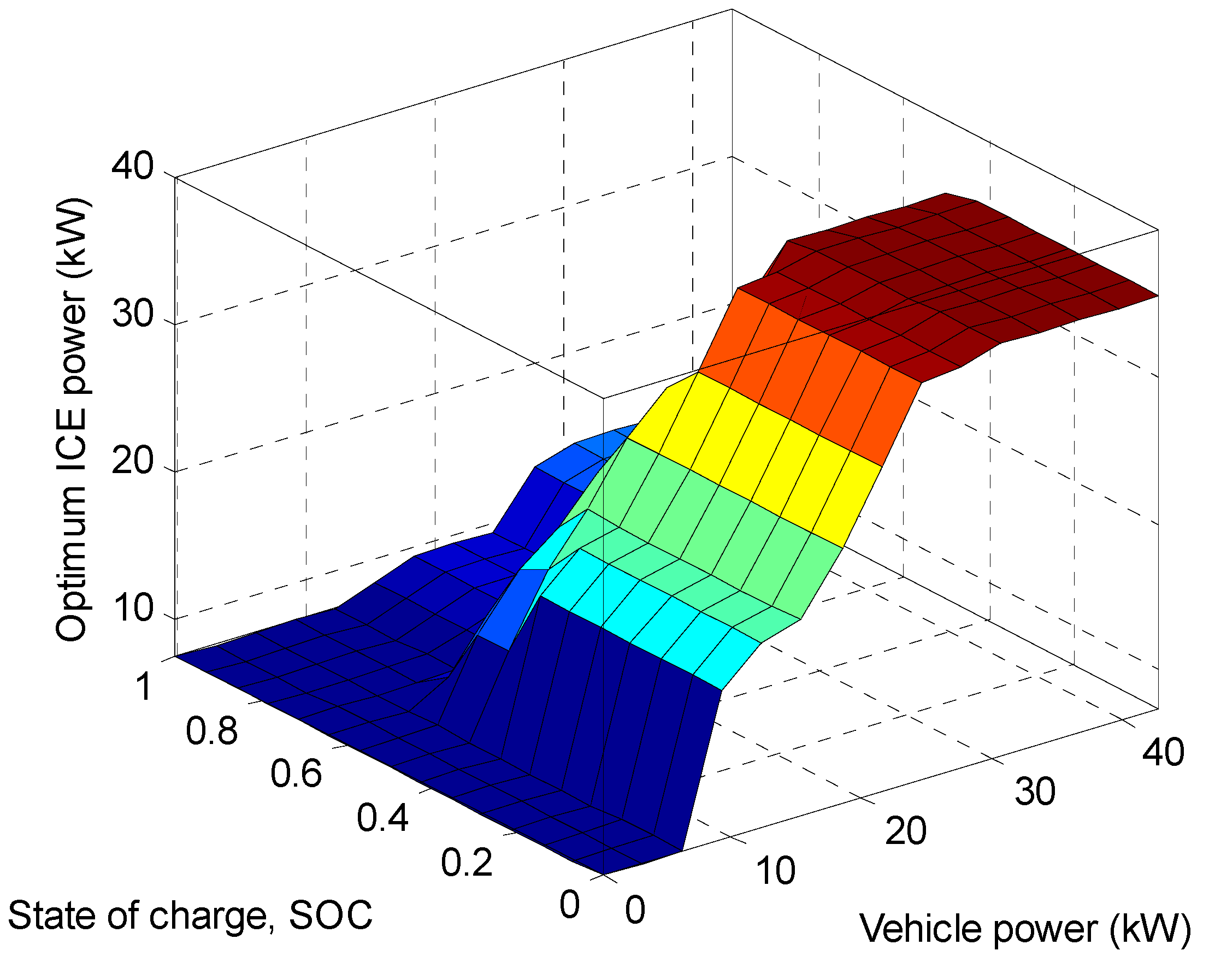
- At low, medium and high power requested at the vehicle’s wheels, the ICE turns OFF when SOC exceeds the high limit value (0.75) to work as EV mode.
- At very low power and when the SOC becomes lower than the minimum limit of 0.45, the ICE turns ON and develops at least its minimum optimum vale of 7 KW to work as ICE charging mode.
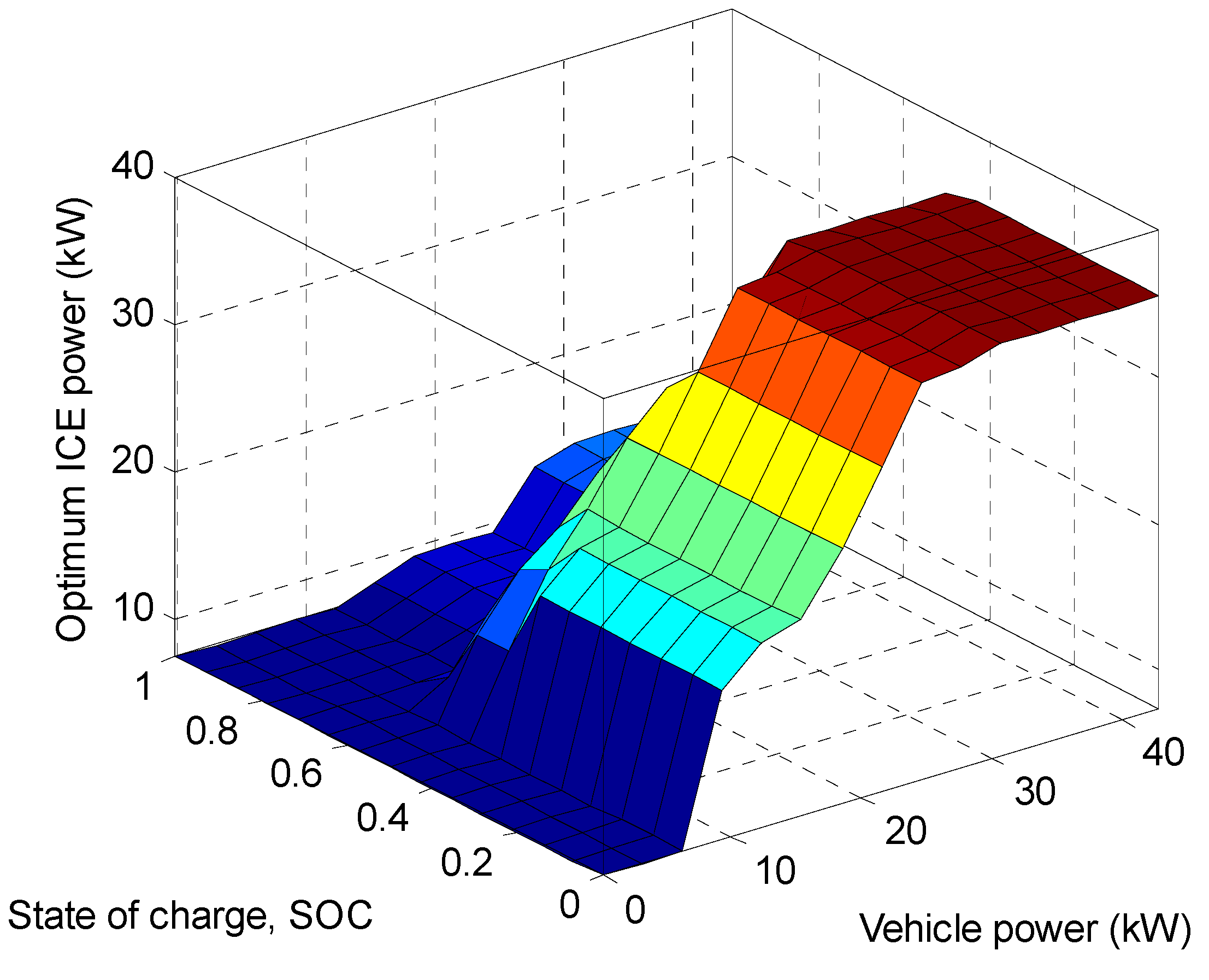
- When the vehicle’s power becomes very high, the ICE develops its maximum optimum power and then decreases its output with increasing the SOC of the battery and also with decreasing the vehicle’s power.
| Vehicle Power (KW) | SOC (State of Charge) | ||||||
|---|---|---|---|---|---|---|---|
| VVL [0–0.45] | VL [0.45–0.55] | L [0.47–0.6] | M [0.55–0.65] | H [0.6–0.7] | VH [0.65–0.75] | VVH [0.75–1.0] | |
| VVL [0–7] | L | L | VL | VL | VL | VL | VL |
| VL [7–10] | M | L | L | L | VL | VL | VL |
| L [8.5–15] | H | M | M | L | VL | VL | VL |
| M [10–20] | H | H | H | M | VL | VL | VL |
| H [15–25] | VH | VH | VH | M | L | L | L |
| VH [20–30] | VVH | VH | VH | H | M | M | L |
| VVH [25–43] | VVH | VVH | VVH | VH | VH | H | M |
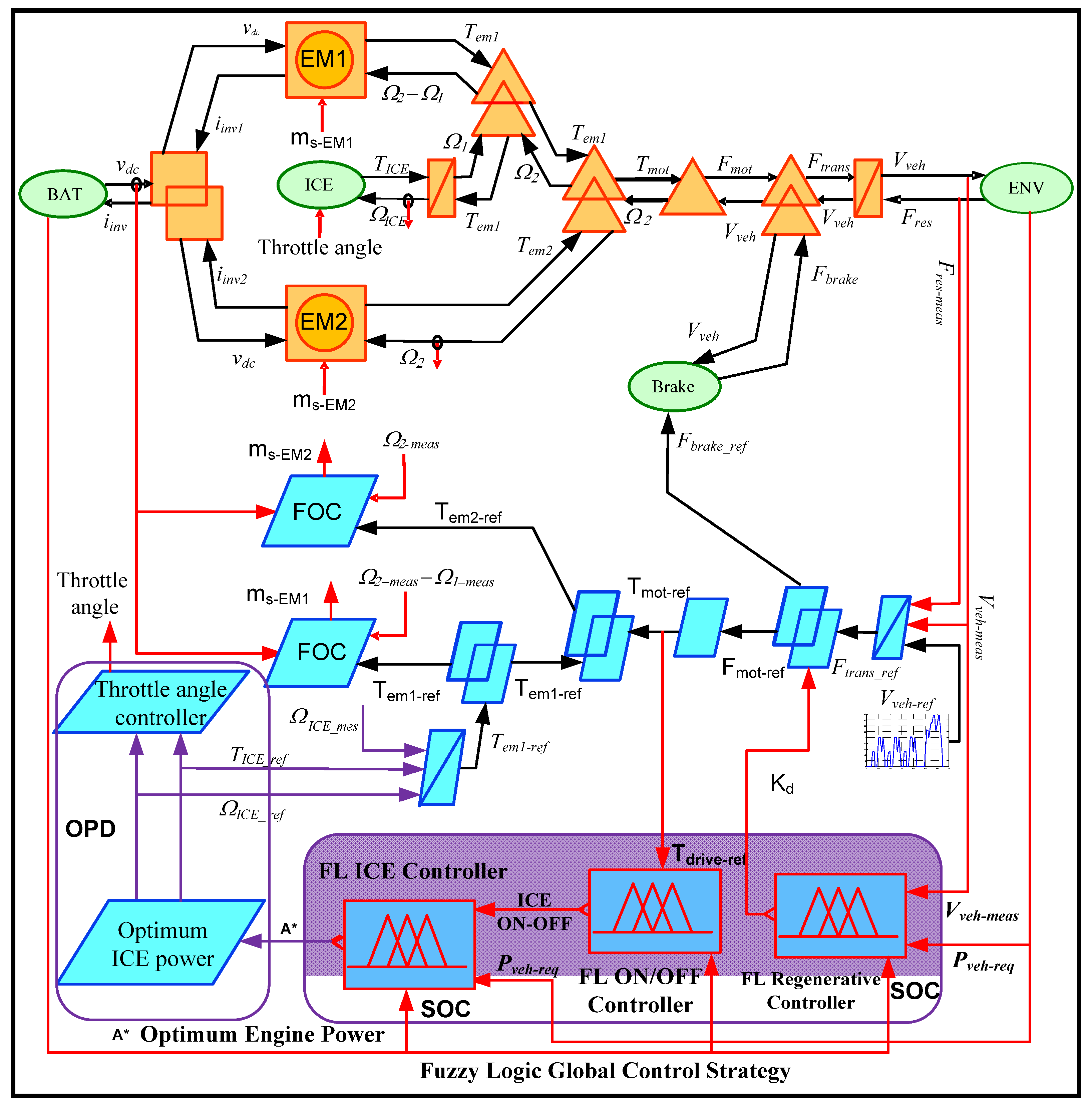
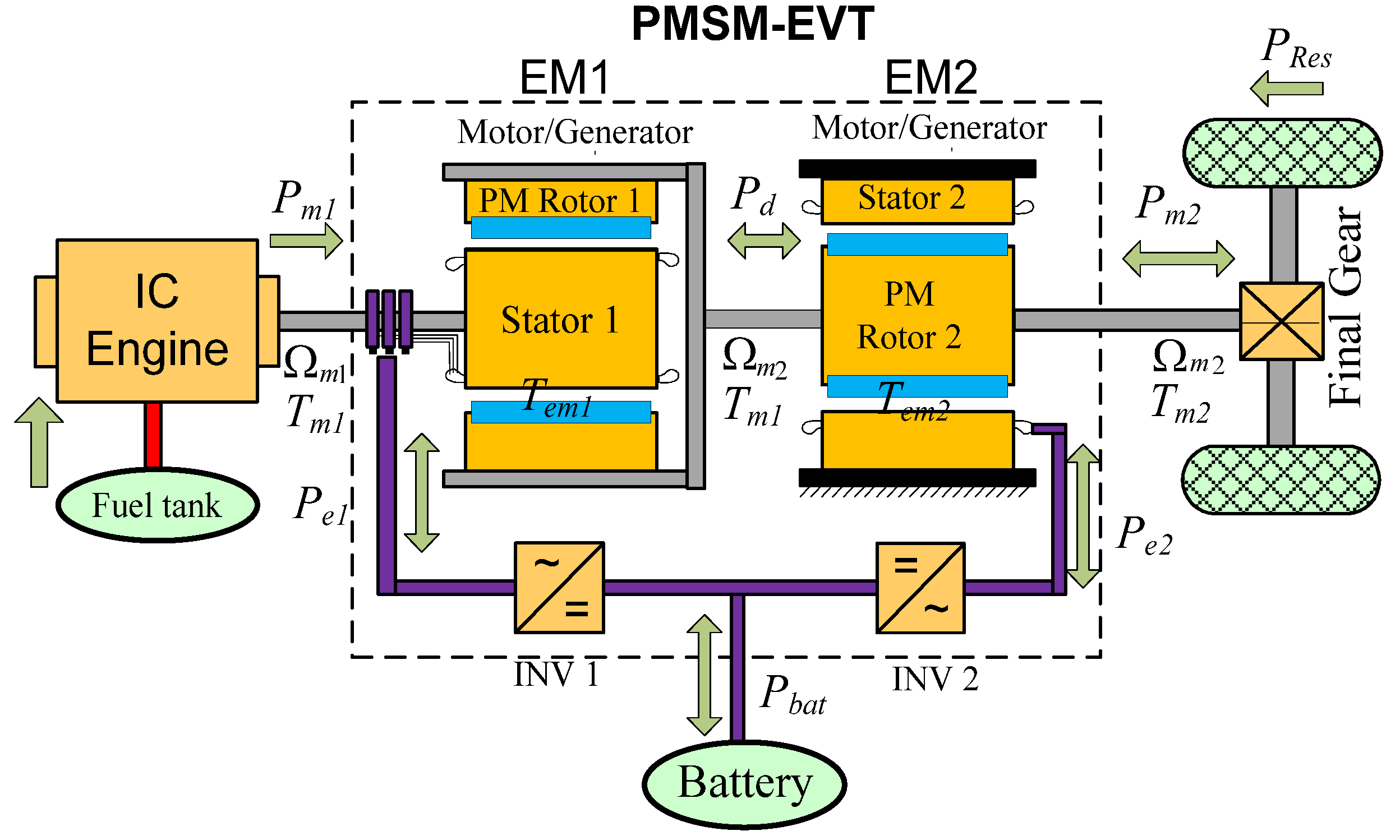
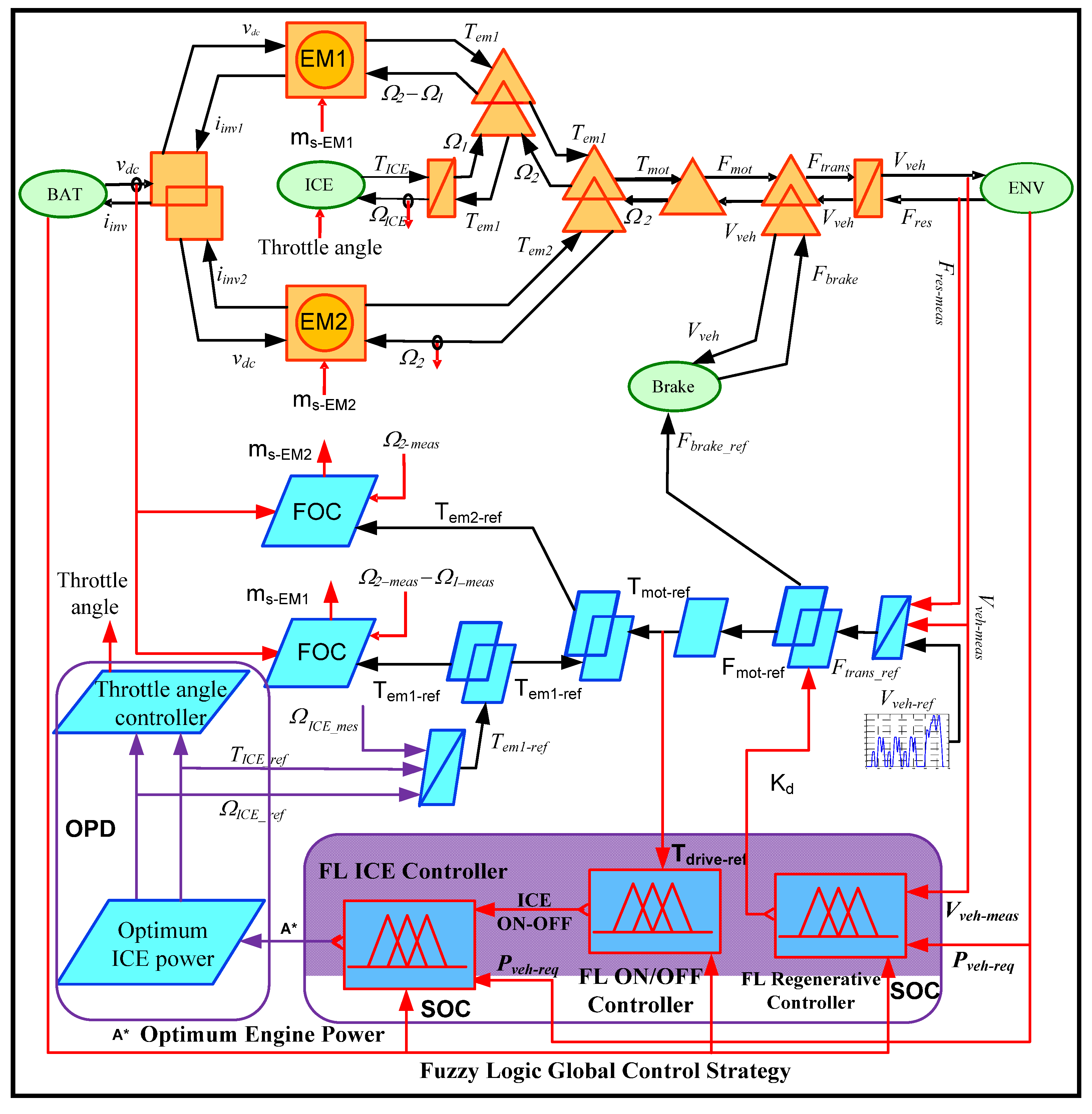
3. EMR Simulation Model and Integration of the PM-EVT-HEV System
| CYC | Velocity (km/h) | Acceleration (m/s2) | Deceleration (m/s2) | Vehicle Torque (Nm) | Vehicle Power (kW) |
|---|---|---|---|---|---|
| Prius 1015 | 70.75 | 1.19 | 1.45 | 120 | 20 |
| Modified Prius | 90.56 | 1.5 | 1.9 | 160 | 28.52 |
| UDDS | 91.25 | 1.48 | 1.48 | 160 | 32 |
| Modified US06 | 70 | 1.66 | 1.66 | - | - |
| HEV | THS-M/G | PMSM-EVT | |||
|---|---|---|---|---|---|
| MG1 | MG2 | EM1 | EM2 | ||
| Maximum power | kW | 15 | 30 | 15.88 | 26.17 |
| Maximum torque | Nm/rpm | 58 @ 2470 | 305@ (0–940) | 105 @ 1378 | 160 @ 1720 |
| Maximum speed | rpm | 8000 | 6000 | 2578 | 4300 |
| Rated power | kW | - | - | 11.54 | 14.4 |
| Rated torque | Nm/rpm | - | - | 80 | 80 |
| Rated speed | rpm | - | - | 1378 | 1720 |
4. Performance Analysis of the Regenerative Braking System
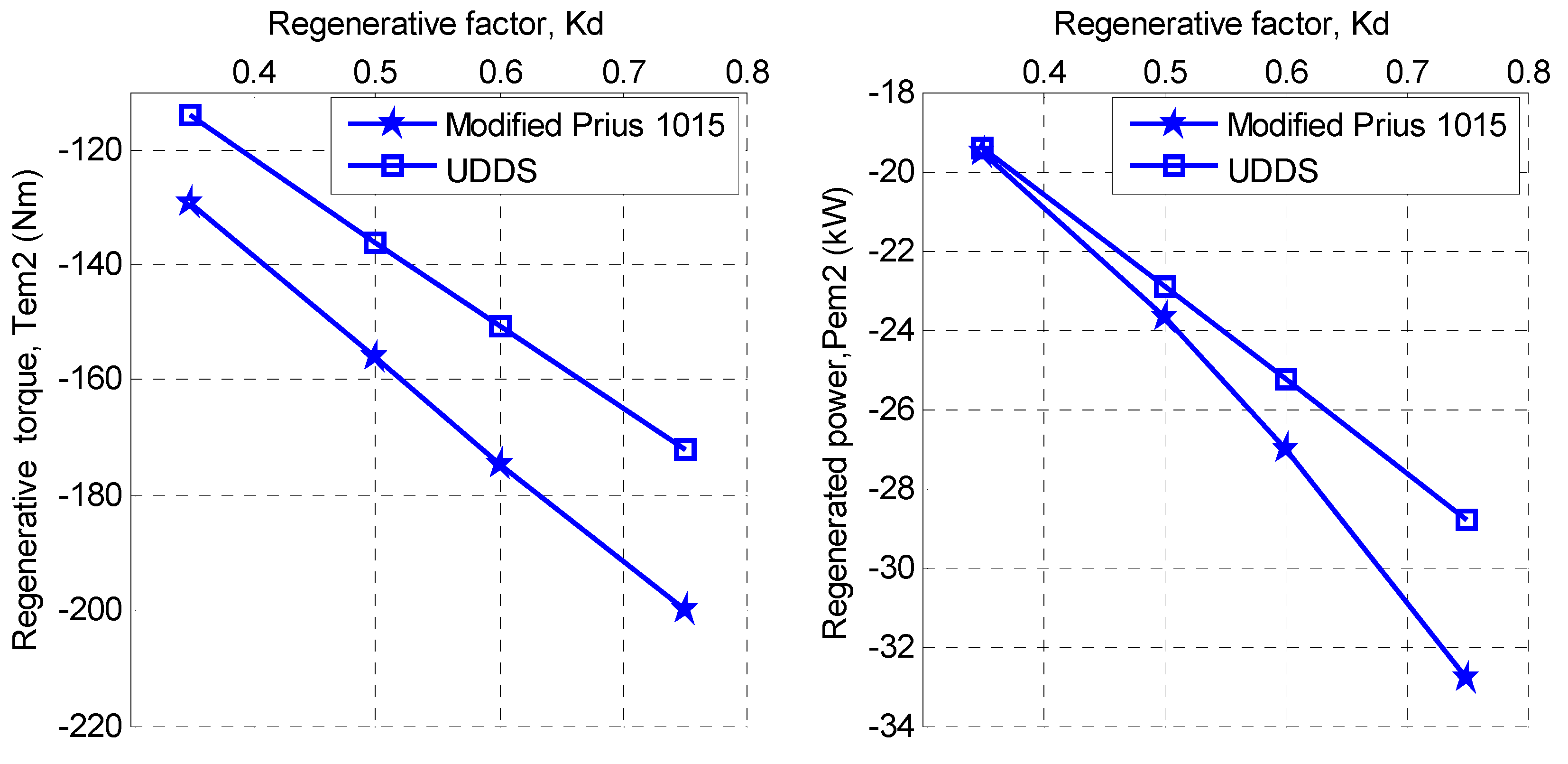
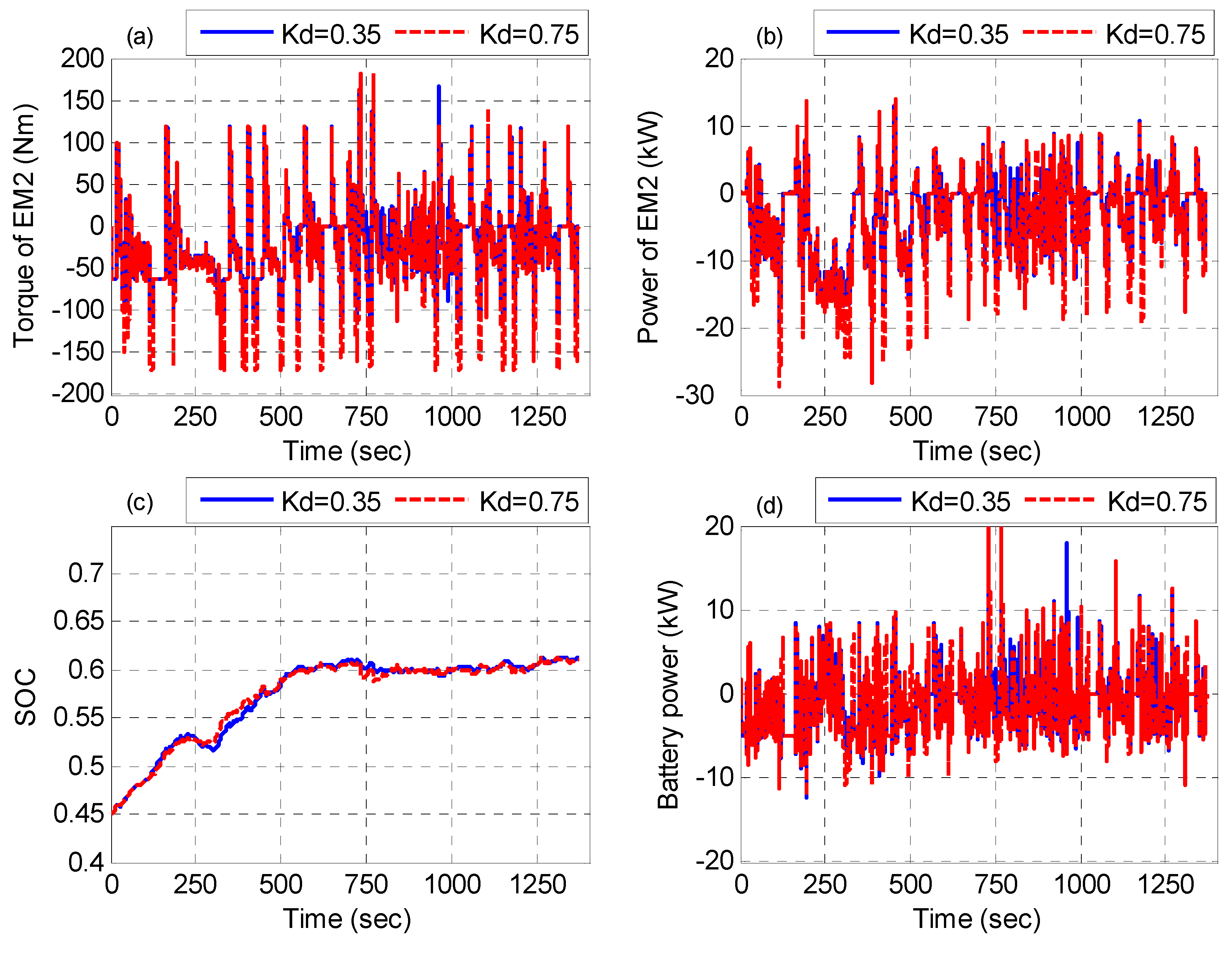
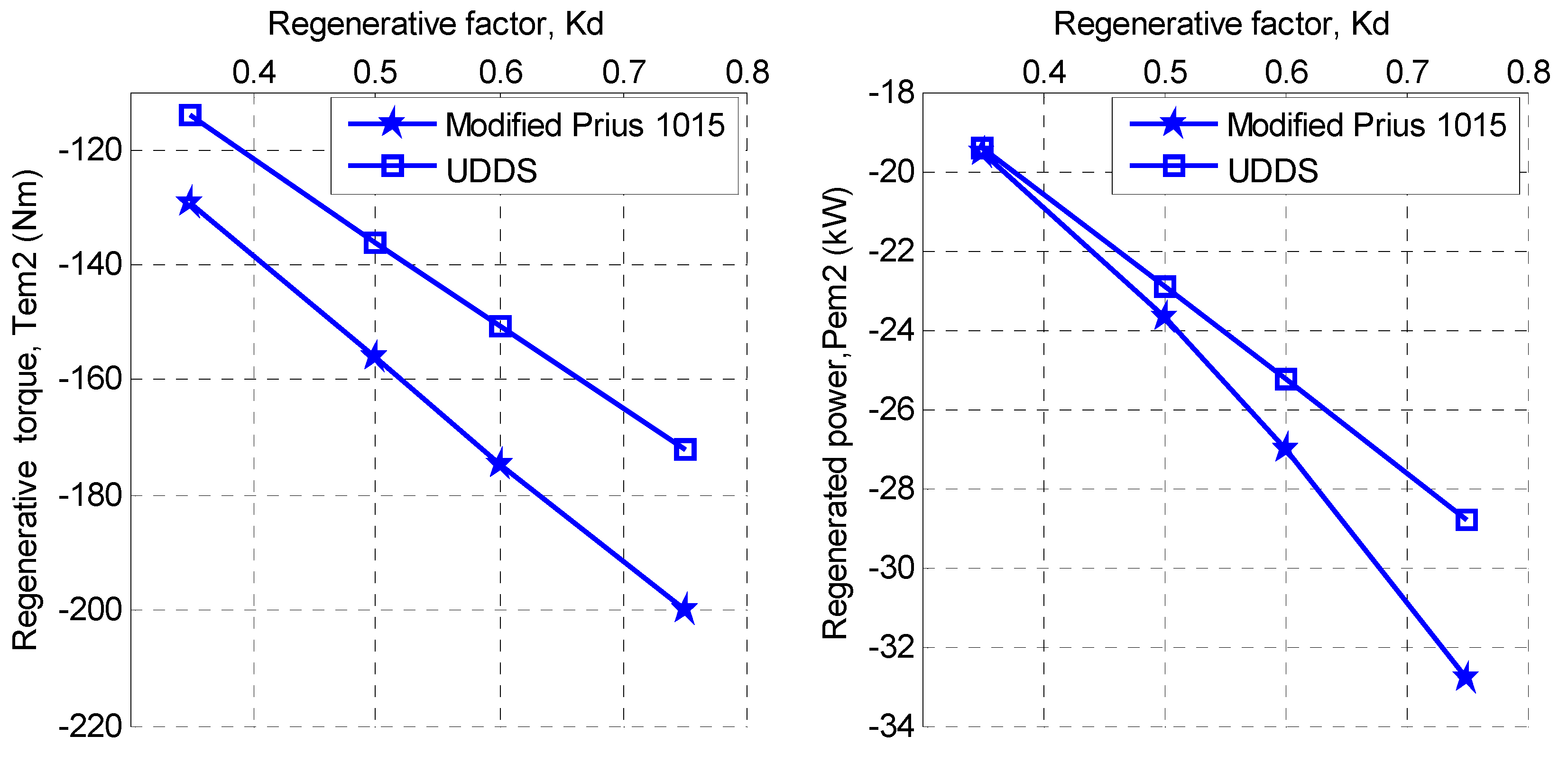
4.1. Analysis at Fixed Regenerative Factors

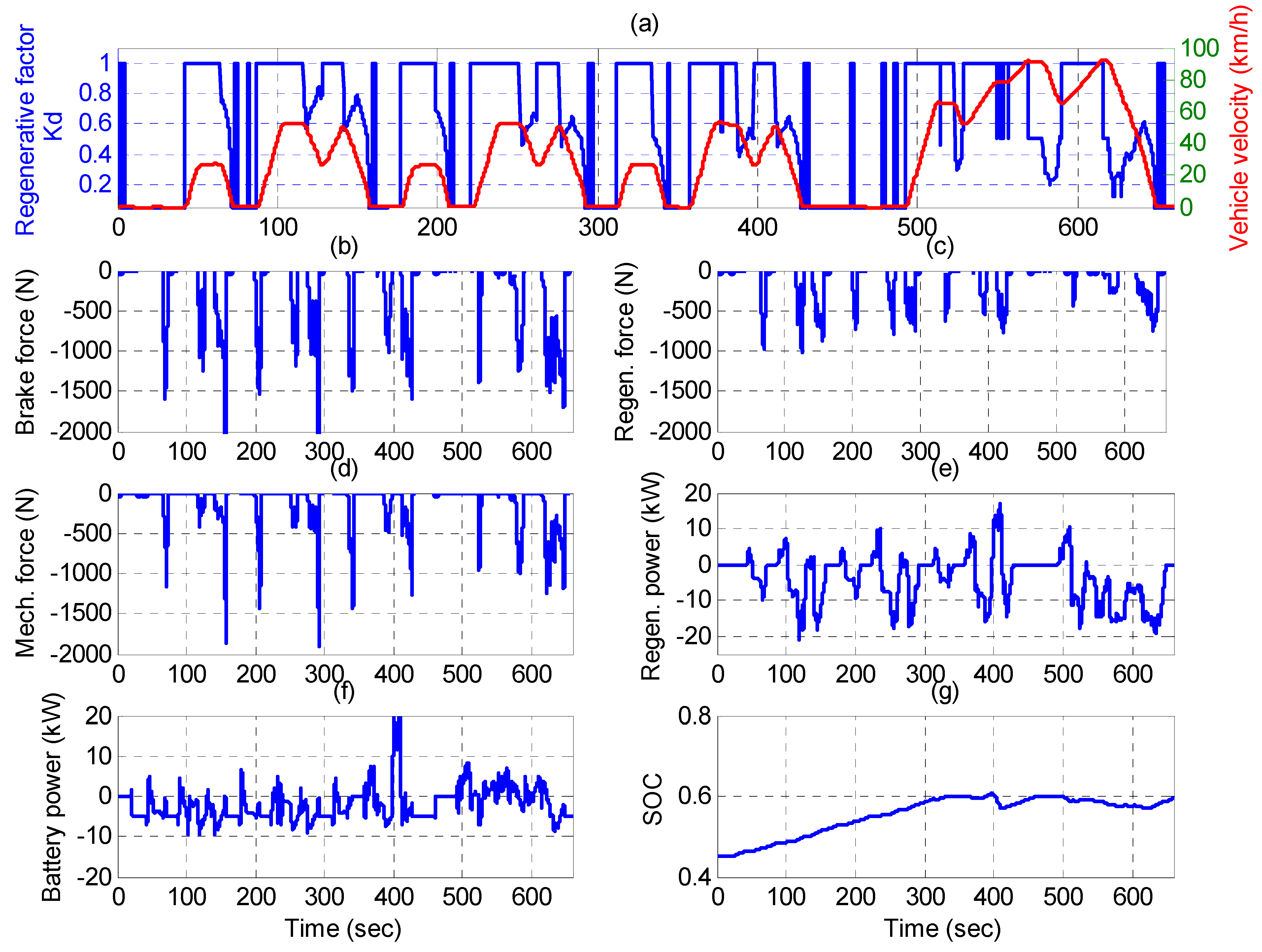
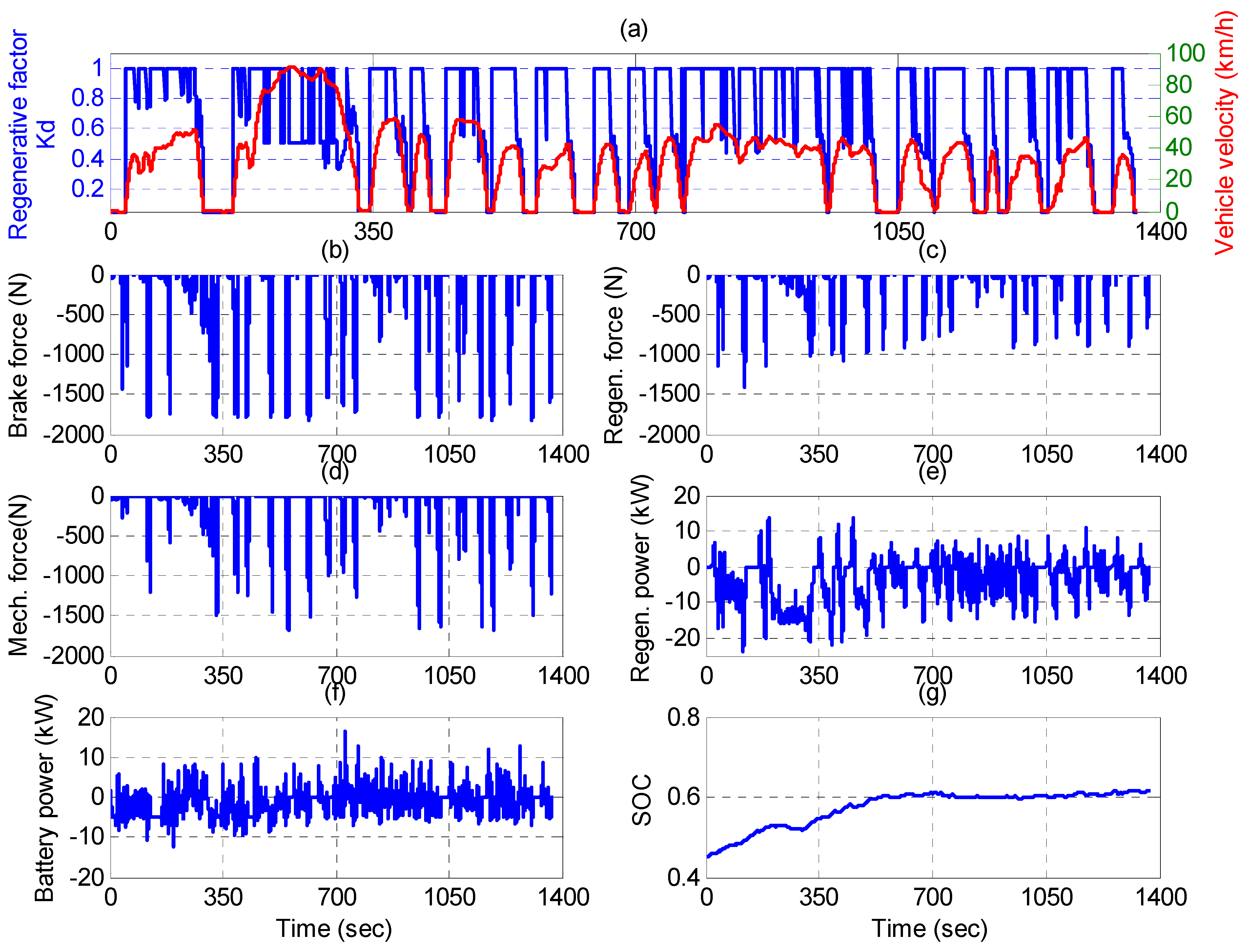
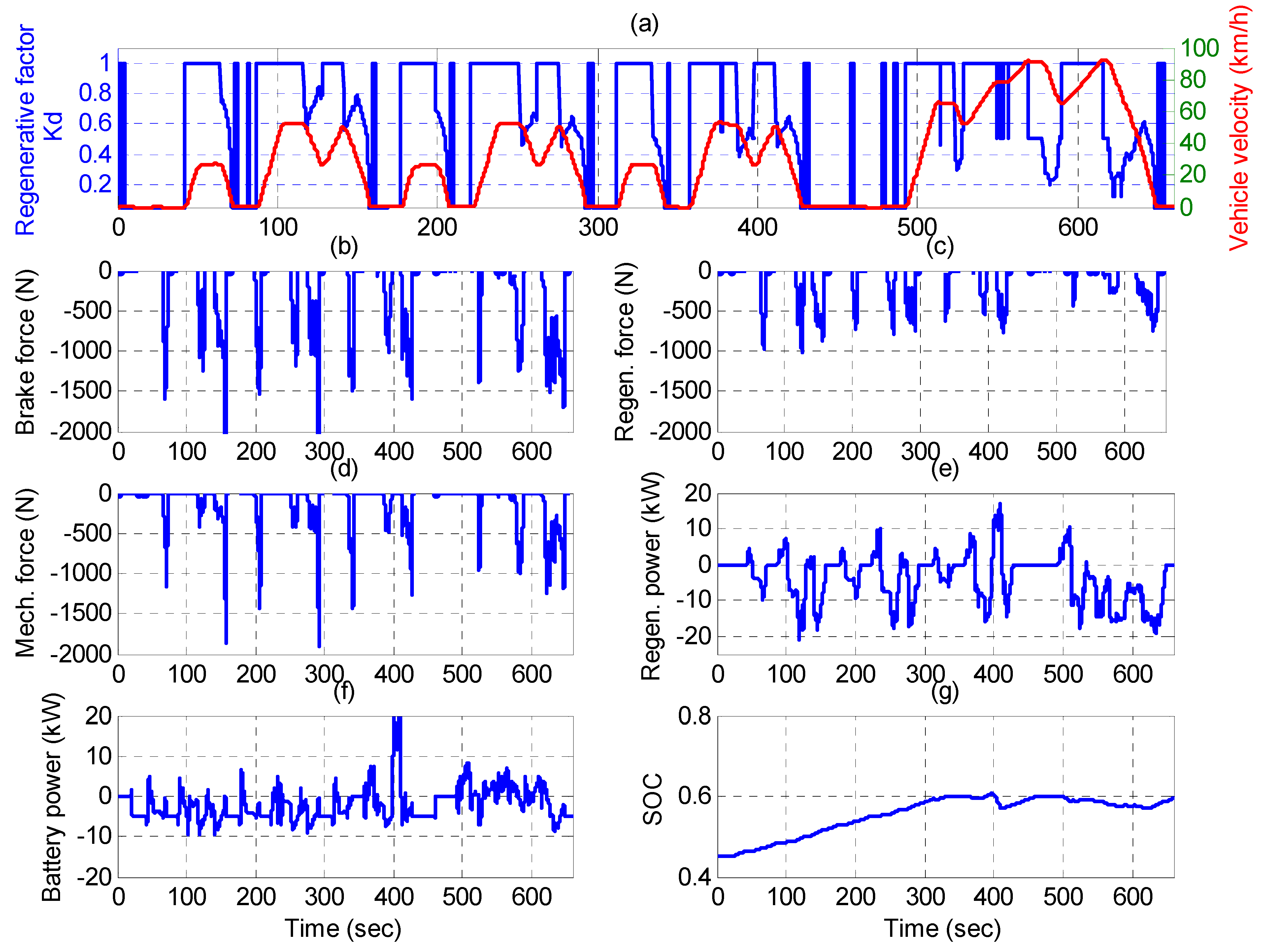
4.2. Analysis of the Regenerative System at FLC Strategy

5. Analysis of System Performance Managed by the Global FL Controllers
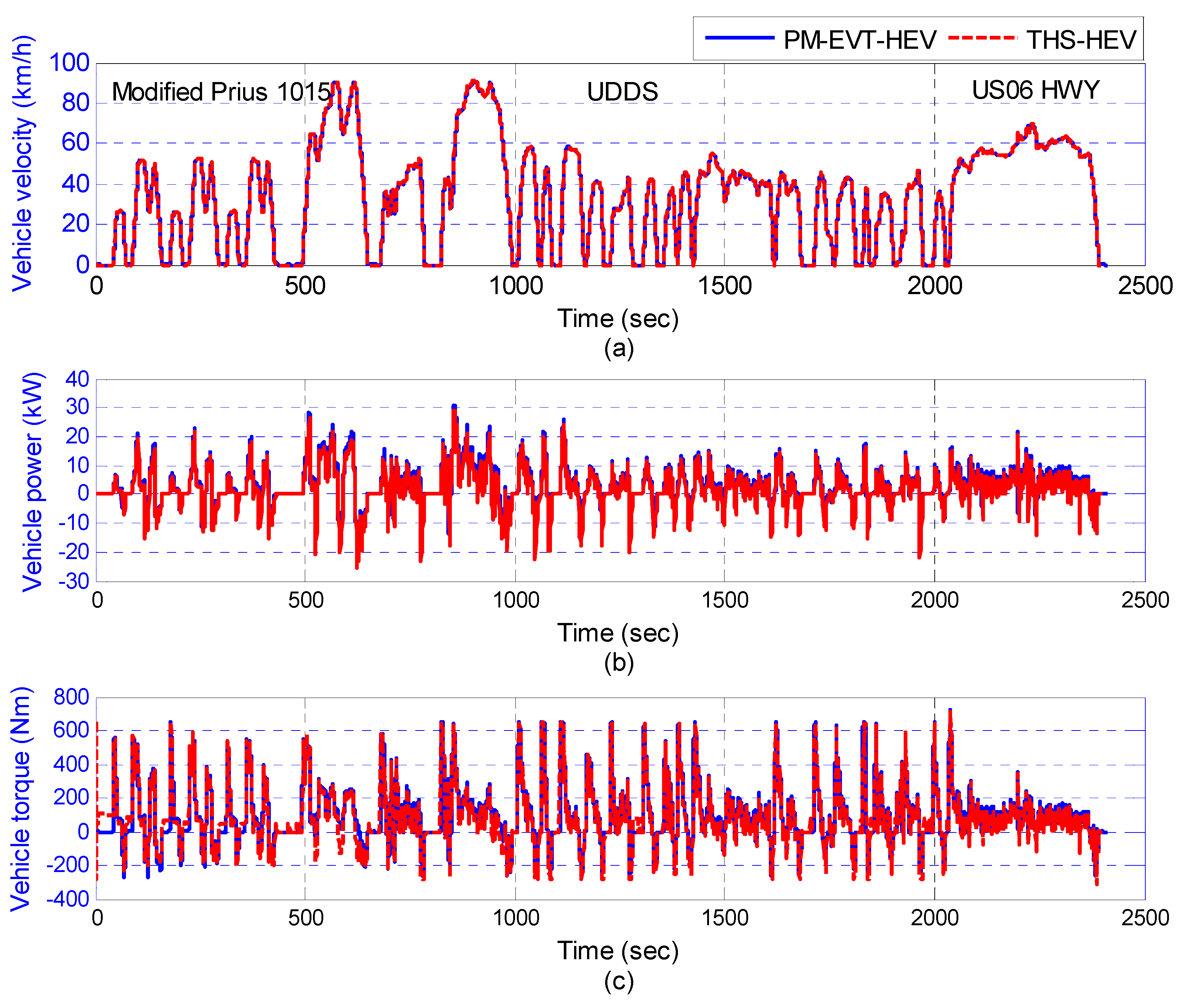
5.1. Vehicle Performance

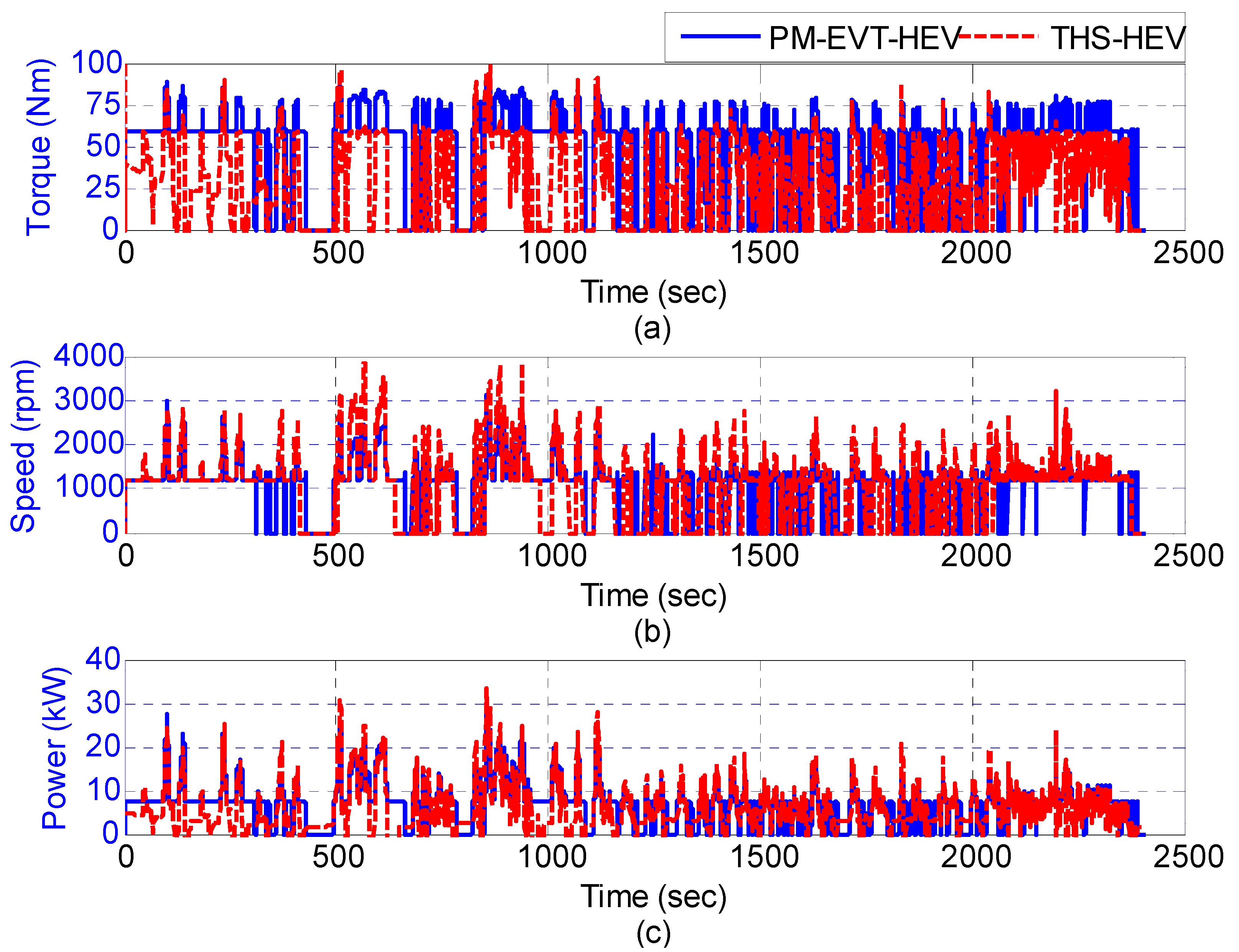
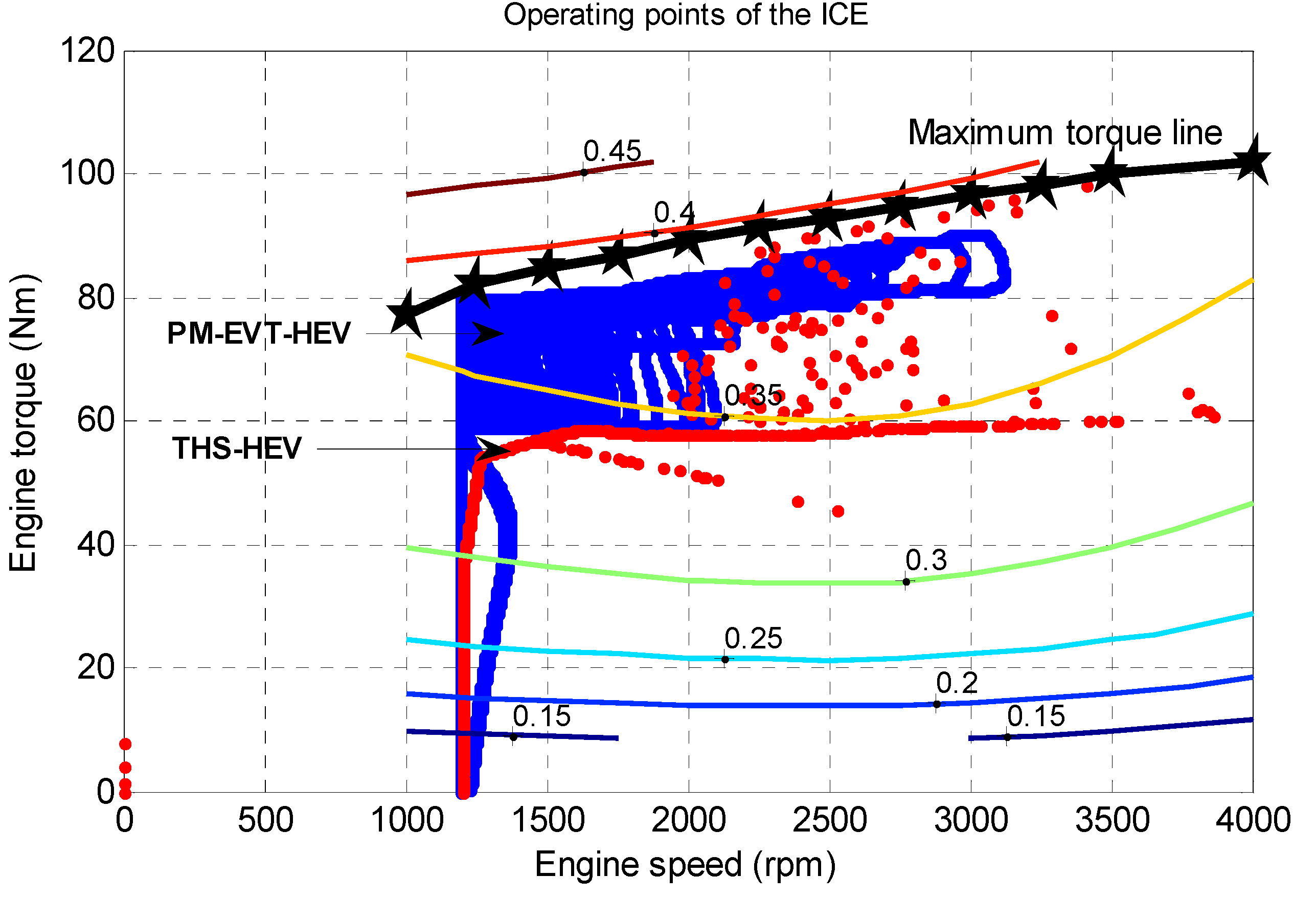
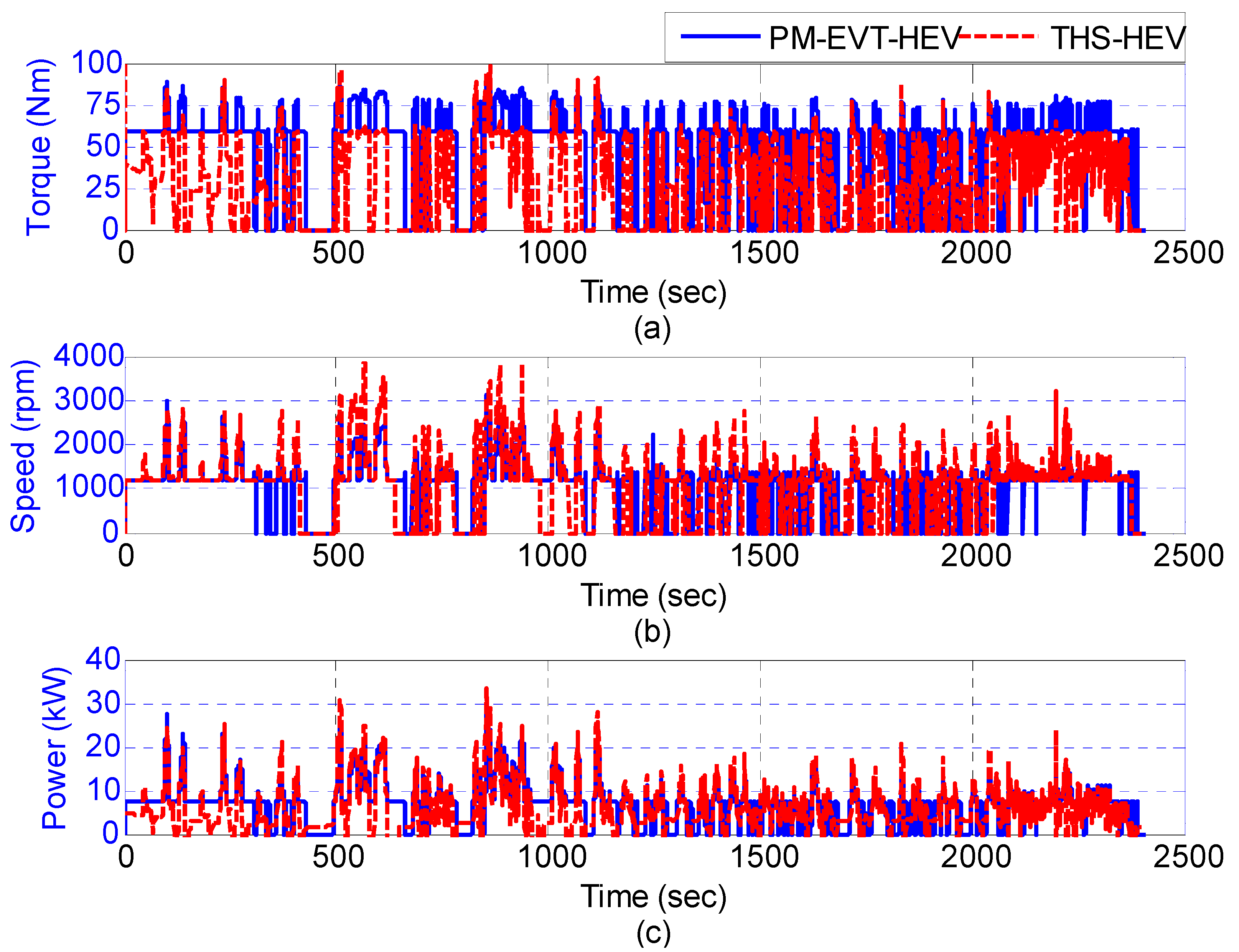
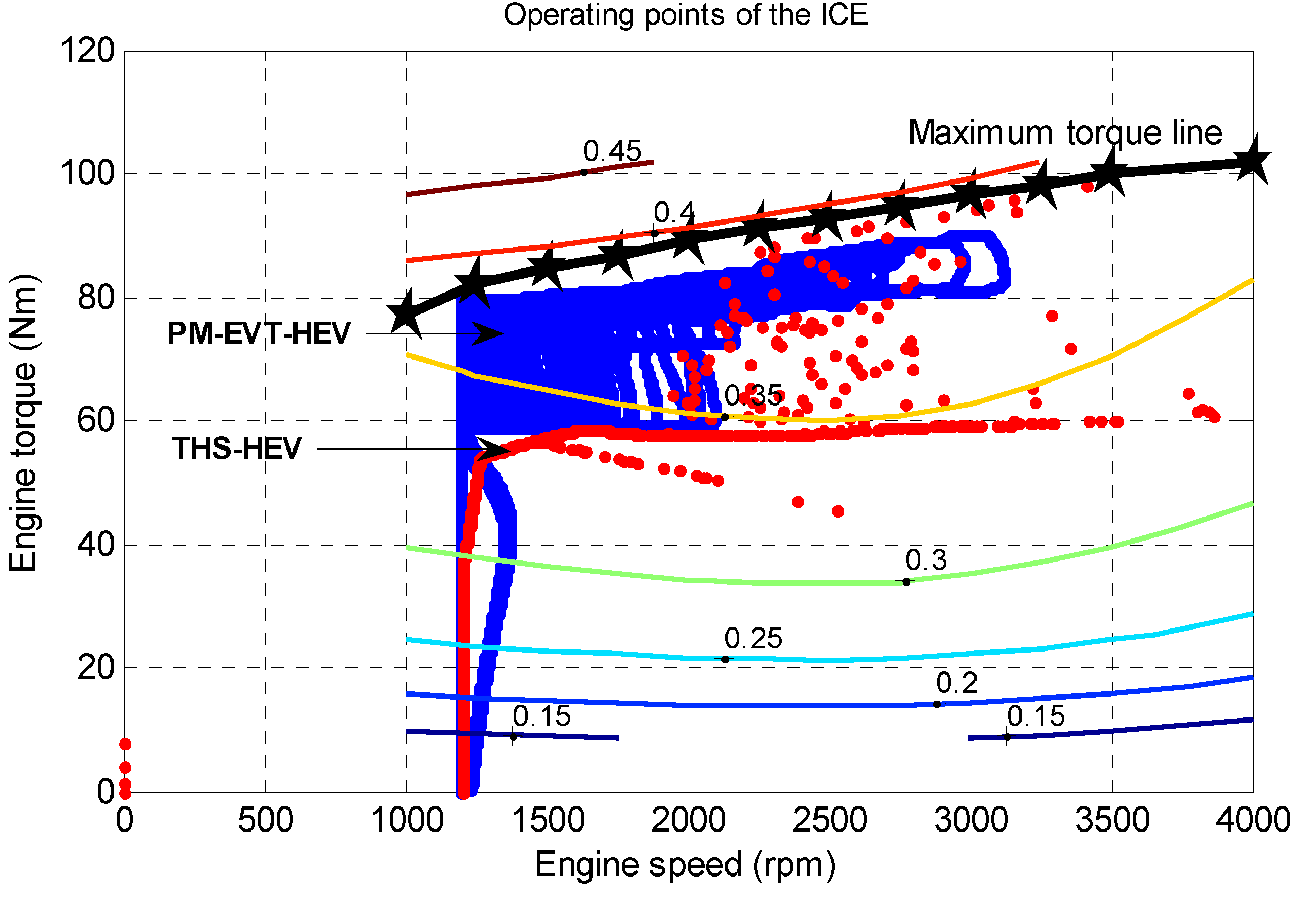
5.2. ICE Performance
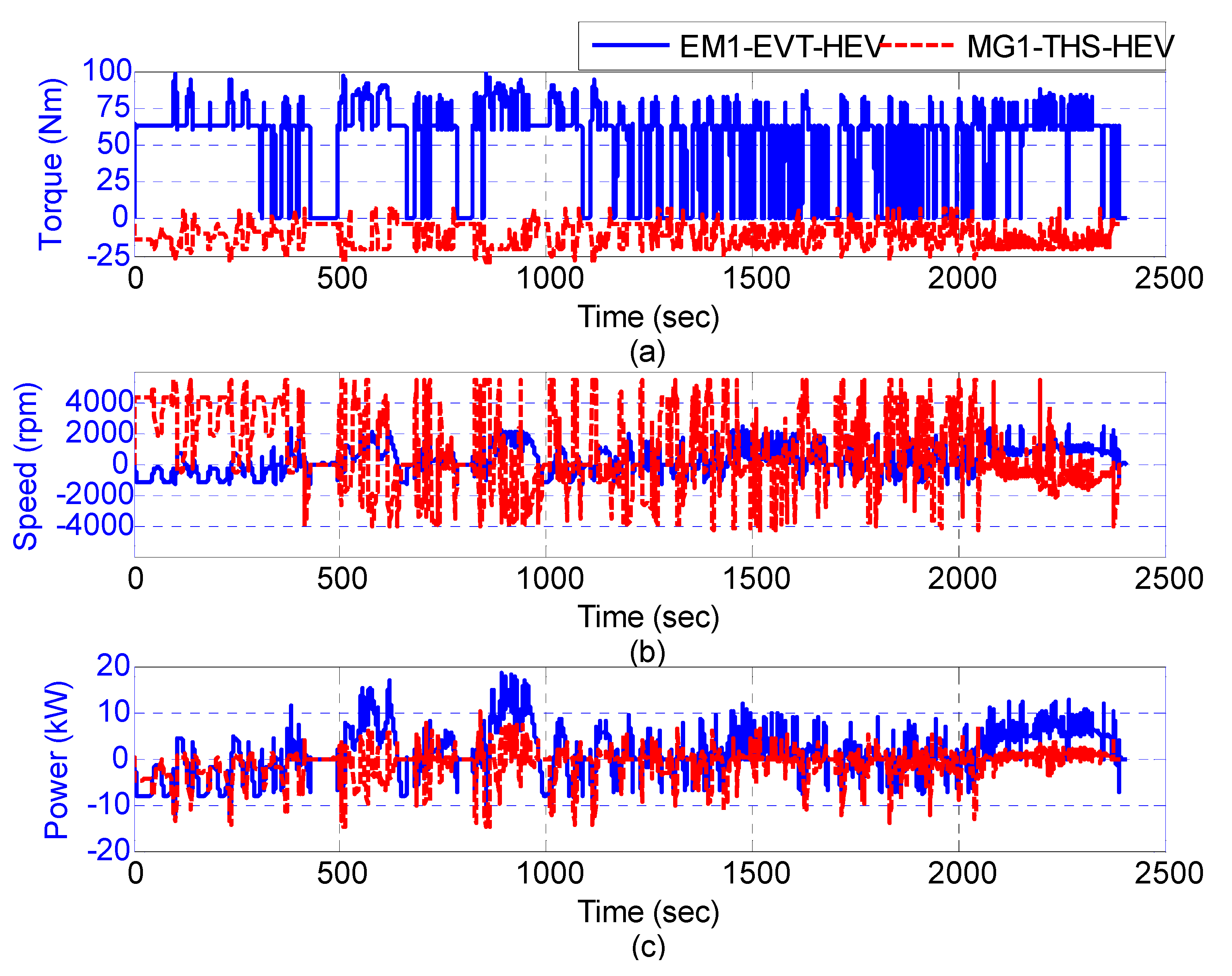
5.3. EM1 Performance

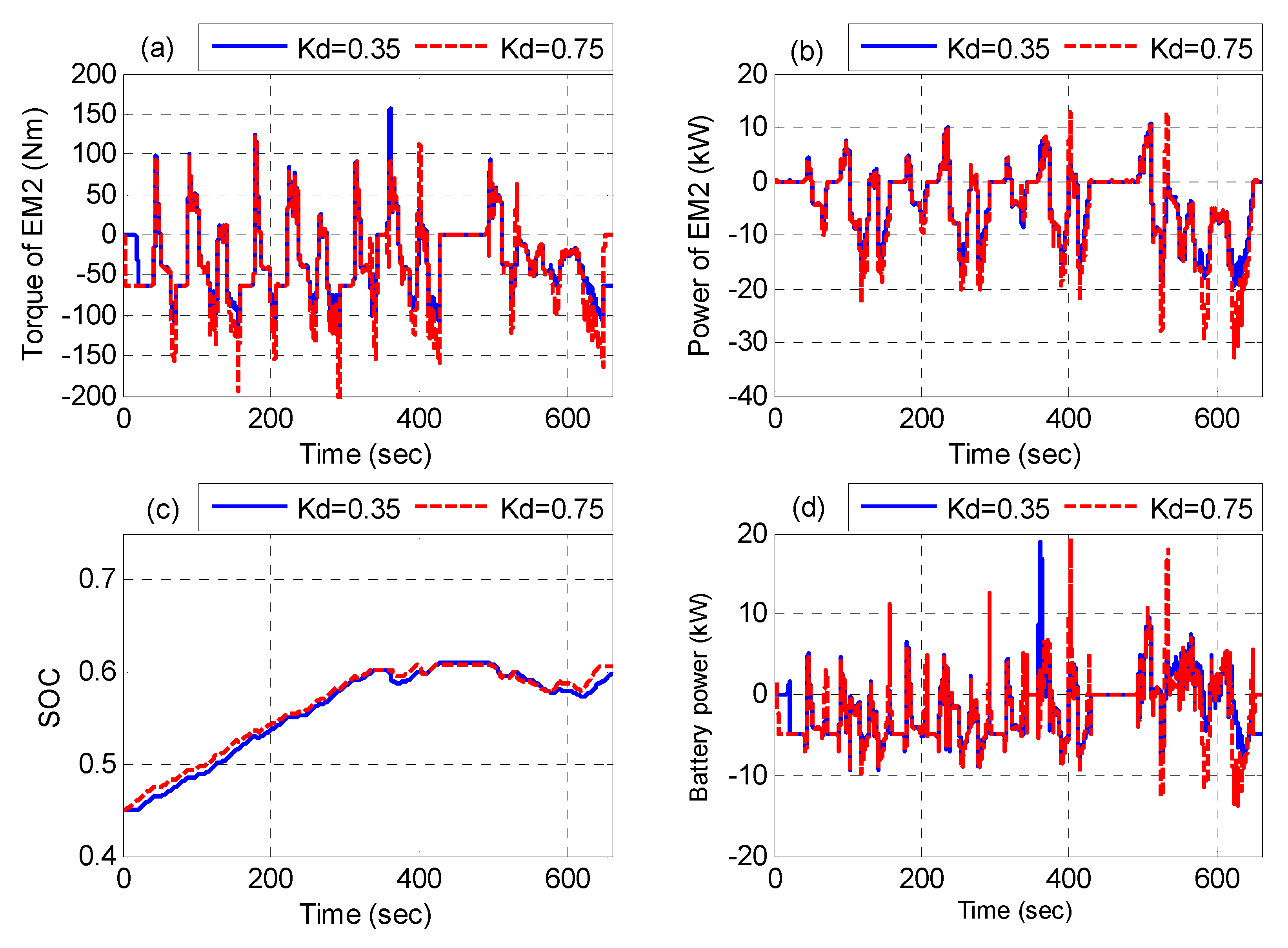
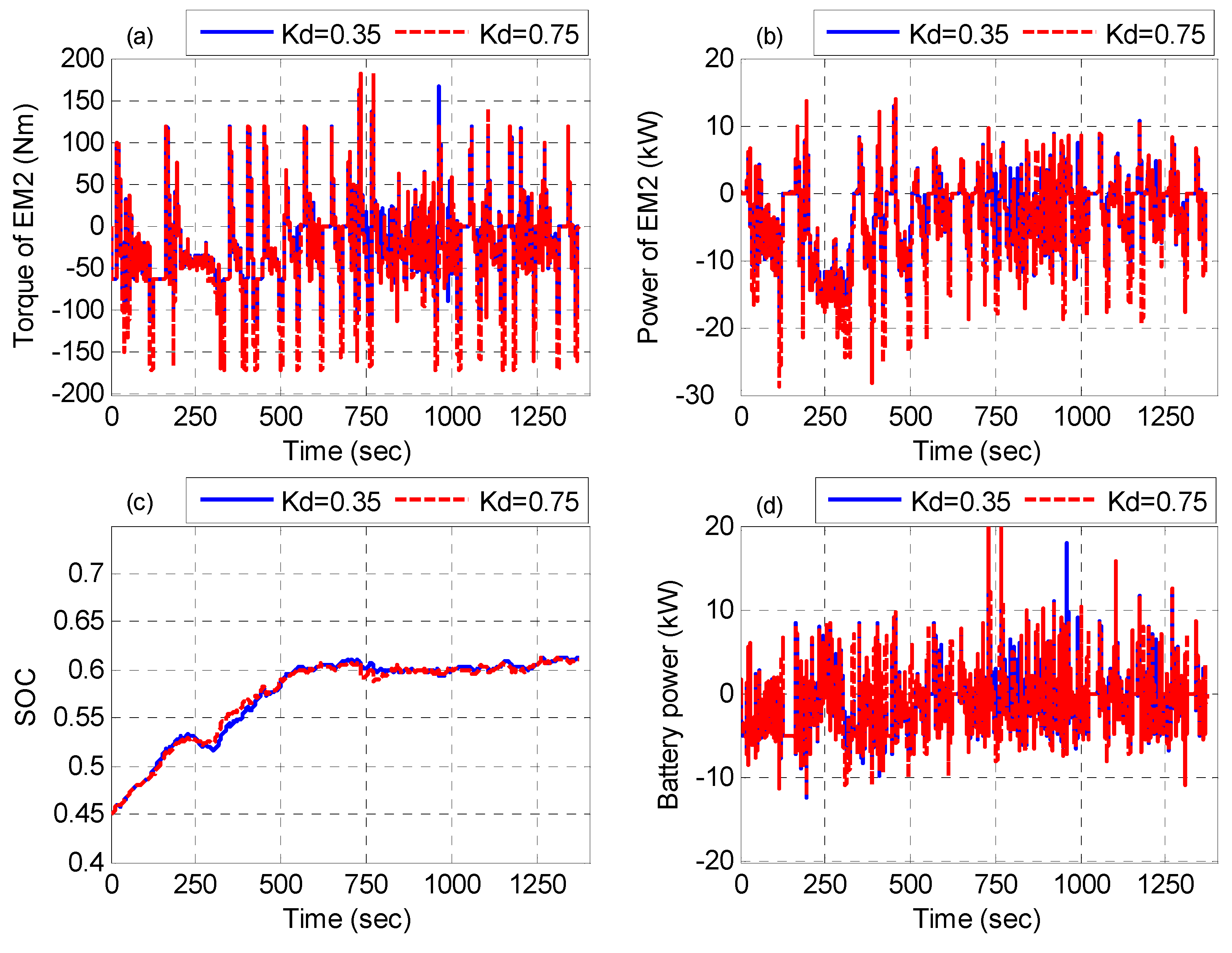
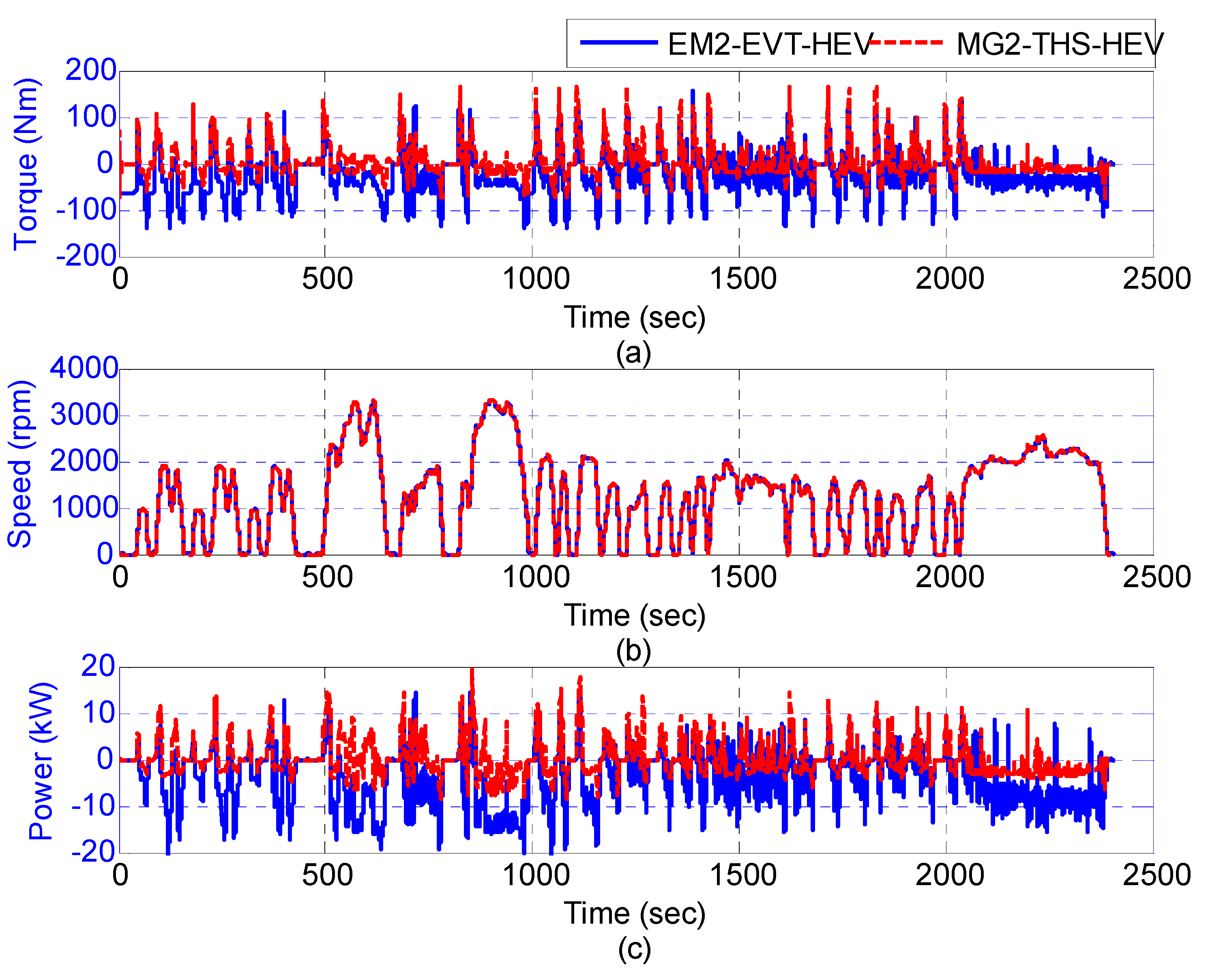
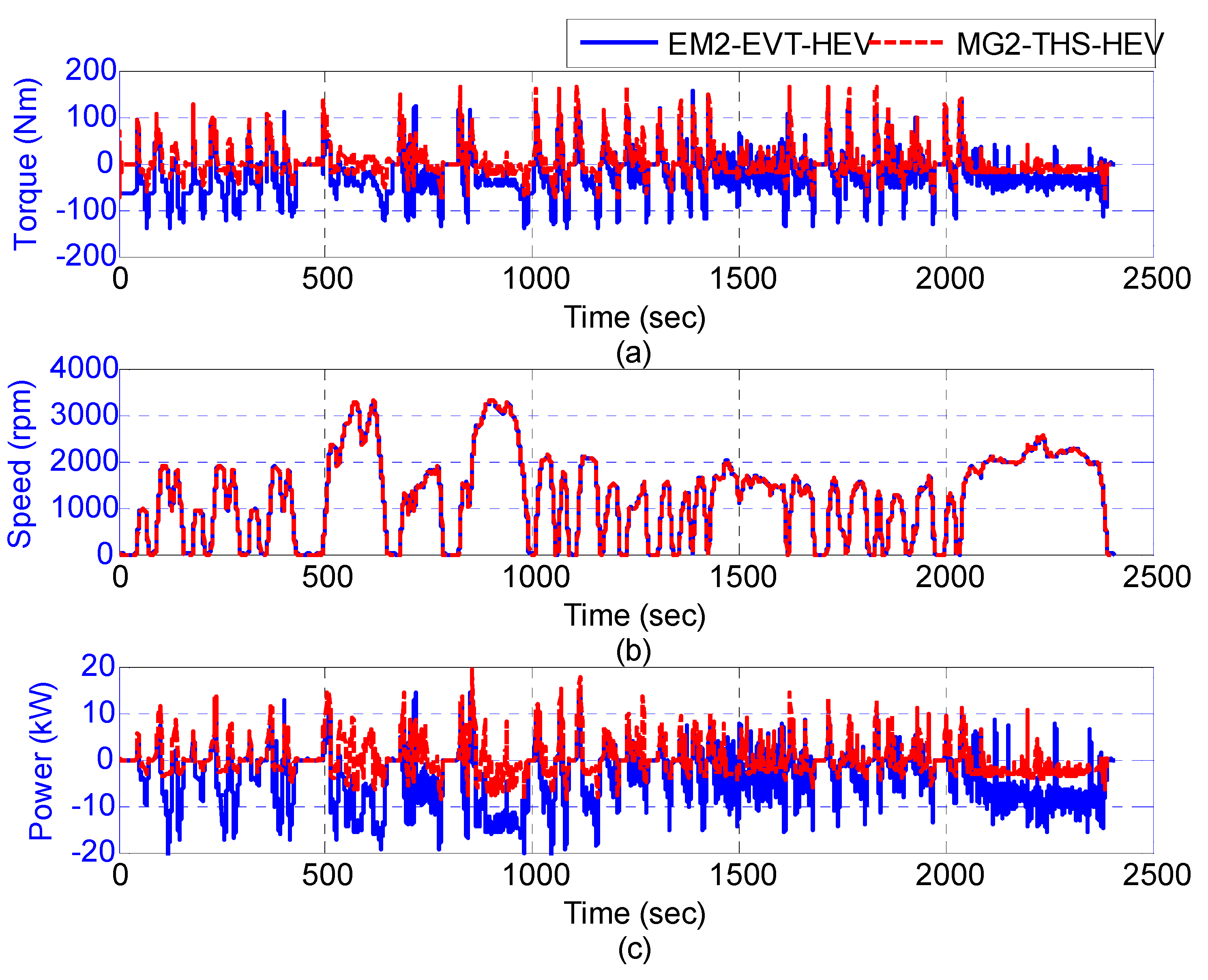
5.4. EM2 Performance
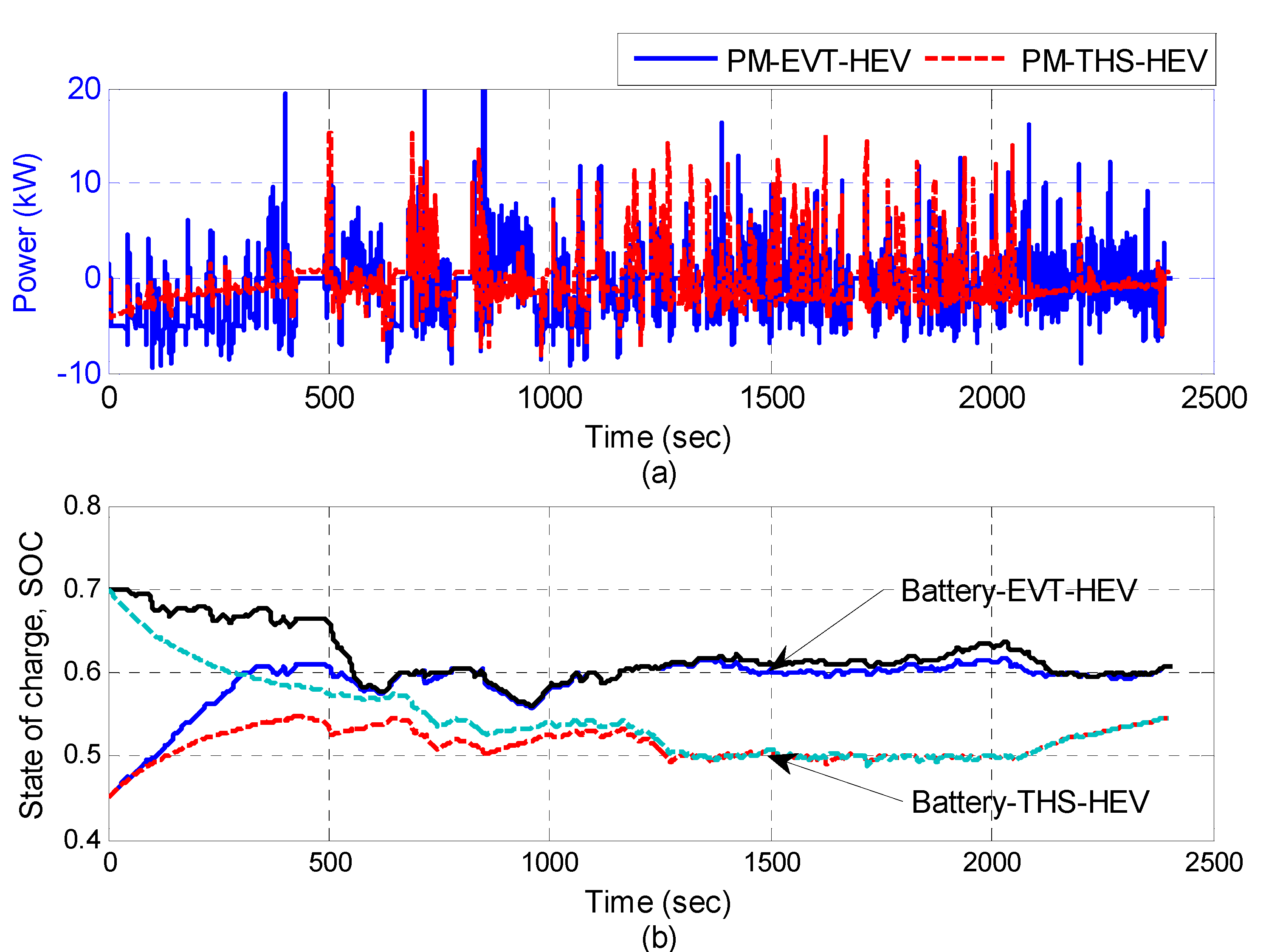
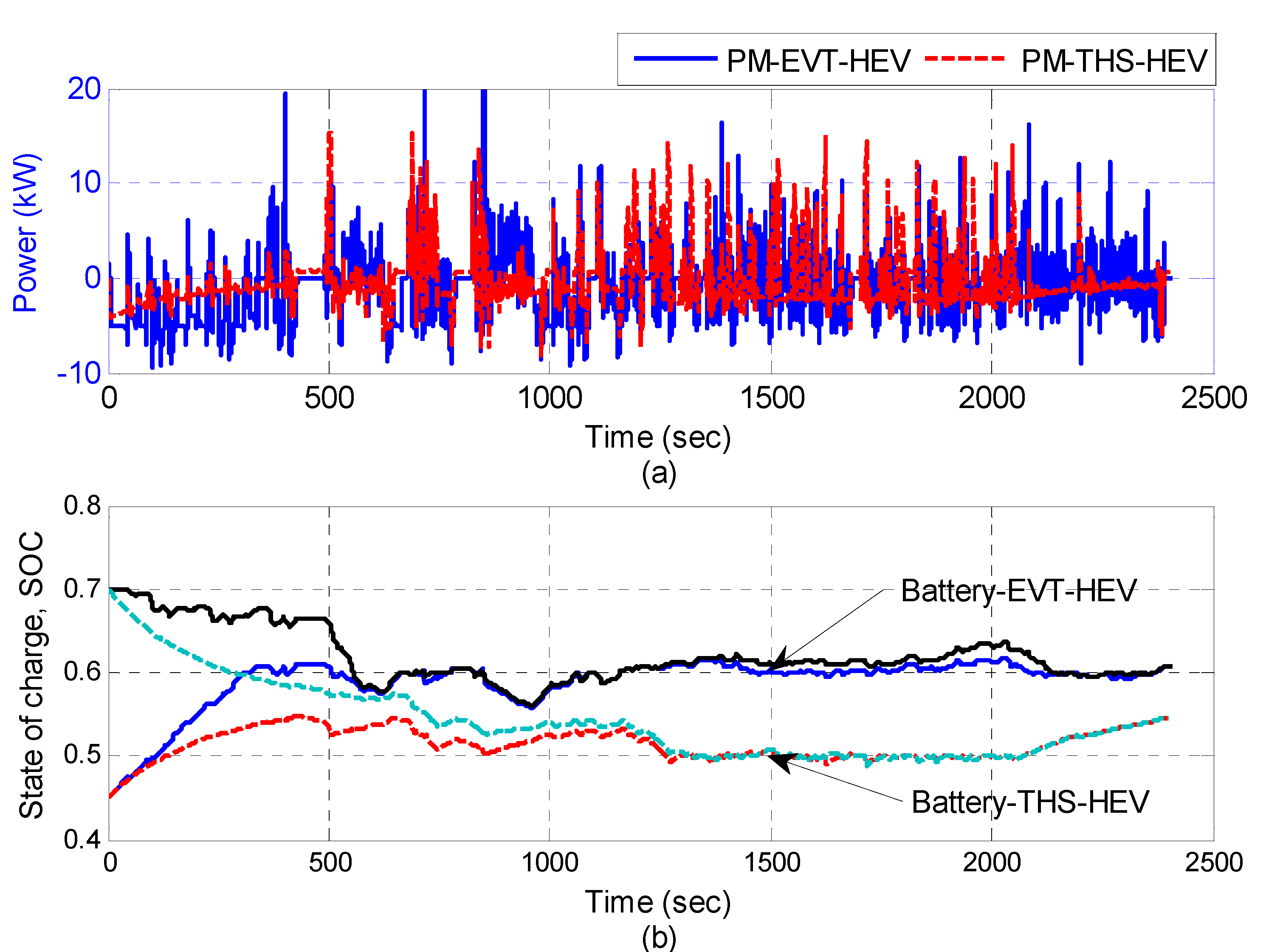
5.5. Battery Performance
6. Conclusions
References
- Hoeijmakers, M.J.; Ferreira, J.A. The Electric Variable transmission. IEEE Trans. Ind. Appl. 2006, 42, 1092–1100. [Google Scholar] [CrossRef]
- Cui, S.; Huang, W.; Zhang, Q. Research on Power Density Improvement Design of a HEV using Induction Machine based Electrical Variable Transmission. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Harbin, China, September 2008; pp. 812–815.
- Cheng, Y.; Chen, K.; Chan, C.C.; Bouscayrol, A.; Cui, S. Global Modelling and Control Strategy Simulation for a Hybrid Electric Vehicle Using Electrical Variable Transmission. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Harbin, China, September 2008.
- Chen, K.; Lhomme, W.; Bouscayrol, A.; Berthon, A. Comparison of Two Series-Parallel Hybrid Electric Vehicles Focusing on Control Structures and Operation Modes. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, September 2009; pp. 1308–1315.
- Cheng, Y.; Cui, S.; Chan, C.C. A Novel series-parallel power train for hybrid electric vehicle applications. J. Asian Electr. Veh. 2009, 7, 1239–1244. [Google Scholar] [CrossRef]
- Xu, L.Y. Breed of Electric Machines-Basic Analysis and Applications of Dual Mechanical Port Electric Machines. In Proceedings of the Eighth International Conference on Electrical Machines and Systems, Nanjing, China, September 2005; pp. 24–29.
- Fan, T.; Wen, X.; Chen, J.; Guo, X. Permanent Magnet Dual Mechanical Port Machine Design for Hybrid Electric Vehicle Application. In Proceedings of IEEE International Conference on Industrial Technology, Chengdu, China, April 2008.
- Cheng, Y.; Espanet, C.; Trigui, R.; Bouscayrol, A.; Cui, S. Design of a Permanent Magnet Electric Variable Transmission for HEV Applications. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Lille, France, September 2010.
- Cheng, Y.; Rochdi, T.; Christophe, E.; Bouscayrol, A.; Cui, S. Specifications and design of a PM electric variable transmission for Toyota Prius II. IEEE Trans. Veh. Technol. 2011, 60, 4106–4114. [Google Scholar] [CrossRef]
- Abdelsalam, A.A.; Cui, S. Control and Analysis of Regenerative Power Distribution on Electrical Variable Transmission Using Fuzzy Logic on HEV System. In Proceedings of the International Conference on Electrical Machines and Systems, Beijing, China, August 2011.
- Abdelsalam, A.A.; Cui, S. Parametric design and robust control strategy for HEV based on permanent magnet electrical variable transmission. Res. J. Appl. Sci. Eng. Technol. 2012. accepted. [Google Scholar]
- Salmasi, F.R. Control strategies for hybrid vehicles: Evolution, classification, comparison and future trends. IEEE Trans. Veh. Technol. 2007, 56, 2393–2397. [Google Scholar] [CrossRef]
- Chen, K.; Cheng, Y.; Bouscayrol, A.; Chan, C.C.; Berthon, A.; Cui, S. Inversion-Based Control of a Hybrid Electric Vehicle Using a Split Electrical Variable Transmission. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Harbin, China, September 2008.
- Hyeoun, D.L.; Seung-Ki, S. Fuzzy Logic-based torque control strategy for parallel-type hybrid electric vehicle. IEEE Trans. Ind. Electron. 1998, 45, 625–632. [Google Scholar] [CrossRef]
- Schouten, N.J.; Salman, M.A.; Kheir, N.A. Fuzzy logic control for parallel hybrid vehicles. IEEE Trans. Control Syst. Technol. 2002, 10, 460–468. [Google Scholar] [CrossRef]
- Bai, Z.; Wang, Y. Research on Modeling and Simulation of Hybrid Electric Vehicle Energy Control Systems. In Proceedings of the Eighth International Conference on Electrical Machines and Systems, Nanjing, China, September 2005; pp. 849–852.
- Anderson, T.A.; Barkman, J.M.; Mi, C. Design and Optimization of a Fuzzy-Rule Based Hybrid Electric Vehicle Controller. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Harbin China, September 2008.
- Zhang, D.; Zhou, Y.; Lui, K.-P.; Chen, Q.-Q. A Study on Fuzzy Control of Energy Management System in Hybrid Electric Vehicle. In Proceedings of Power and Energy Engineering Conference, APPEEC Asia-Pacific, Wuhan, China, March 2009.
- Khoucha, F.; Benbouzid, M.E.H.; Kheloui, A. An Optimal Fuzzy Logic Power Sharing Strategy for Parallel Hybrid Electric Vehicles. In Proceedings of IEEE Vehicle Power and Propulsion Conference, Lille, France, September 2010.
- Chen, Z.; Zhang, X.; Mi, C. Slide mode and fuzzy logic based powertrain controller for the energy management and battery lifetime extension of series hybrid electric vehicles. J. Asian Electr. Veh. 2010, 8, 1425–1432. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, L.; Ehsani, M. Investigation of the effectiveness of regenerative braking for EV and HEV. SAE 1999. 1999–01–2910. [Google Scholar]
- Gao, Y.; Chu, L.; Ehsani, M. Design and control principles of hybrid braking system for EV, HEV and FCV. IEEE Trans. Veh. Technol. 2008, 54, 384–391. [Google Scholar]
- Li, X.; Xu, L.; Li, J.; Hua, J.; Ouyang, M. Regenerative Braking Control Strategy for Fuel Cell Hybrid Vehicles using Fuzzy Logic. In Proceedings of International Conference on Electrical Machines and Systems, Wuhan, China, October 2008; pp. 2712–2716.
- Zhang, J.; Song, B.; Cui, S.; Ren, D. Fuzzy Logic Approach to Regenerative Braking System. In Proceedings of the International Conference on Intelligent Human-Machine Systems and Cybernetics, IHMSC, Hangzhou, China, August 2009; pp. 451–454.
- Zhang, Z.; Xu, G.; Li, W.; Zheng, L. The Application of Fuzzy Logic in Regenerative Braking of EV. In Proceedings of Second International Conference on Intelligent Human-Machine Systems and Cybernetics, Nanjing, China, May 2010; pp. 124–128.
- Chen, K.; Bouscayrol, A.; Berthon, A.; Delarue, P.; Hissel, D.; Trigui, R. Global modeling of different vehicles using energetic macroscopic representation to focus on system functions and system energy properties. IEEE Veh. Technol. Mag. 2009, 4, 73–79. [Google Scholar] [CrossRef]
- Chen, K. Common Energetic Macroscopic Representation and Unified Control Structure for Different Hybrid Electric Vehicles. Ph.D. Thesis, University of Lille 1, Lille, France, May 2010. [Google Scholar]
- Advanced Vehicle Simulator, ADVISOR; National Renewable Energy Laboratory (NREL) of U.S. Department of Energy: Washington, DC, USA, 2002.
- Ehsani, M.; Gao, Y.; Emadi, A. Modern Electric, Hybrid Electric and Fuel Cell Vehicles: Fundamental, Theory and Design, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Abdelsalam, A.A.; Cui, S. A Fuzzy Logic Global Power Management Strategy for Hybrid Electric Vehicles Based on a Permanent Magnet Electric Variable Transmission. Energies 2012, 5, 1175-1198. https://doi.org/10.3390/en5041175
Abdelsalam AA, Cui S. A Fuzzy Logic Global Power Management Strategy for Hybrid Electric Vehicles Based on a Permanent Magnet Electric Variable Transmission. Energies. 2012; 5(4):1175-1198. https://doi.org/10.3390/en5041175
Chicago/Turabian StyleAbdelsalam, Abdelsalam Ahmed, and Shumei Cui. 2012. "A Fuzzy Logic Global Power Management Strategy for Hybrid Electric Vehicles Based on a Permanent Magnet Electric Variable Transmission" Energies 5, no. 4: 1175-1198. https://doi.org/10.3390/en5041175