Finding Multiple Optimal Solutions to Optimal Load Distribution Problem in Hydropower Plant


Abstract
:1. Introduction

2. Problem Description
3. Solution Approach for Finding Multiple Solutions
3.1. Review of General Dynamic Programming (DP) Framework
- (1)
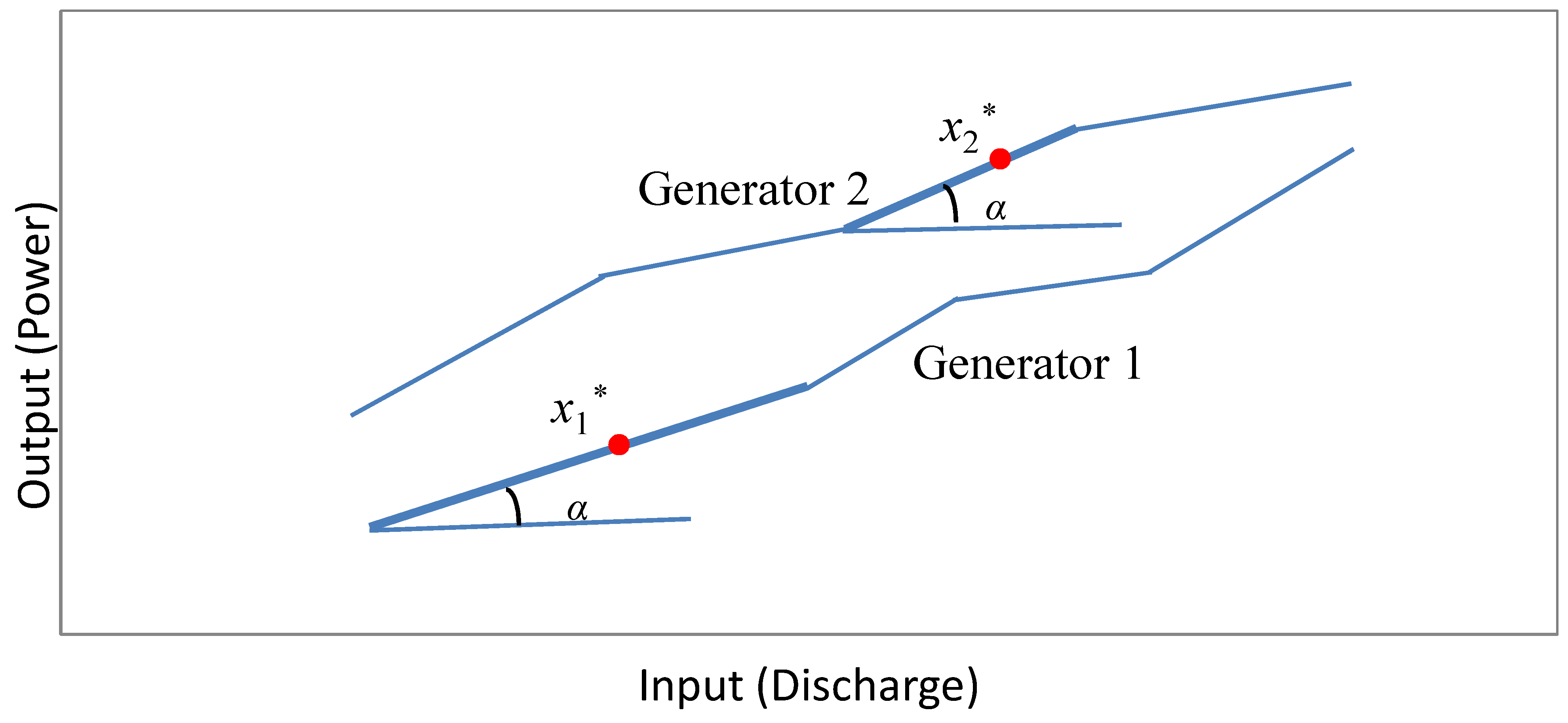
- Setting the decision variable as the load allocated to the generator.
- (2)
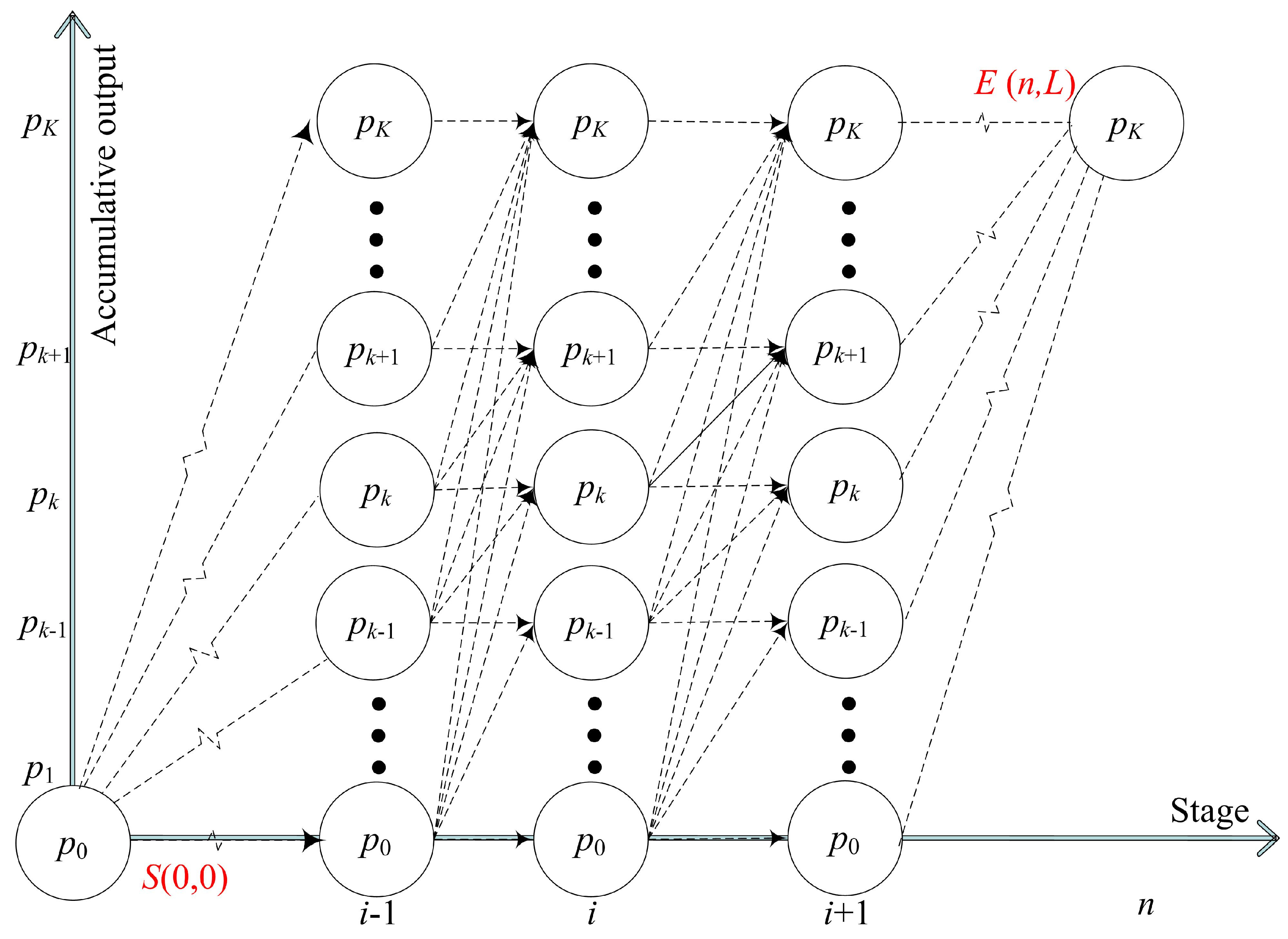
- Setting the stage variable as the accumulative load of the first i generators: .
- (3)
- Establishing the state equation as:
- (4)
- Define as the minimum total water discharge when the accumulative electric load from the first generator to the one is , i.e.,We also defined if equation (3) is infeasible. Then problem (1) is equivalent to finding . We can find recursively using the following Bellman equation:where is defined as the boundary condition.
3.2. Discretized OLD as a Shortest Path Problem


3.3. Finding MOS
- For :We set for as follows:
- For to n:We set for as follows:
- For :We set for as follows:and
- For to n:We set for as follows:If , we set,where are the optimal solutions of problem (8). Otherwise, we set .
3.4. Multiple Solutions Space
4. Case Study
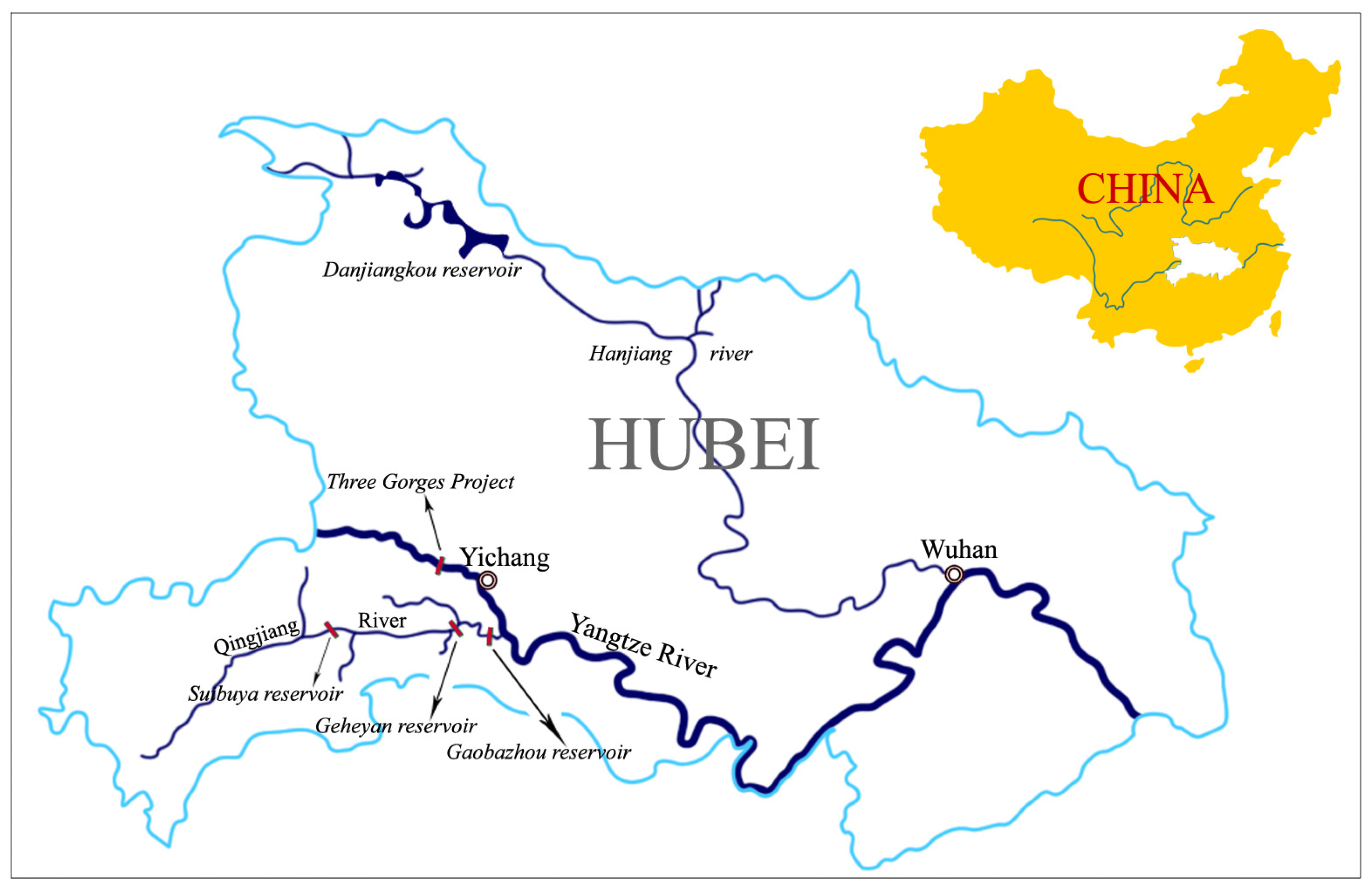
4.1. Geheyan Hydropower Plant


4.2. Global Optimal Solution

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load L (MW) | Output of units (MW) | Total discharge (m/s) | Total discharge (m/s) | |||
|---|---|---|---|---|---|---|
| Unit 1 | Unit 2 | Unit 3 | Unit 4 | |||
| 500 | 255 | 245 | \ | \ | 518 | 517.1 |
| 550 | 295 | 255 | \ | \ | 562 | 562.0 |
| 600 | 300 | 300 | \ | \ | 608 | 608.0 |
| 650 | 295 | 285 | 70 | \ | 688 | 686.3 |
| 700 | 265 | 255 | 180 | \ | 734 | 731.0 |
| 750 | 250 | 250 | 250 | \ | 777 | 775.6 |
| 800 | 295 | 255 | 250 | \ | 821 | 820.5 |
| 850 | 300 | 295 | 255 | \ | 866 | 865.5 |
| 900 | 300 | 300 | 300 | \ | 912 | 912.0 |
| 950 | 295 | 295 | 295 | 65 | 991 | 989.5 |
| 1,000 | 255 | 255 | 255 | 235 | 1,036 | 1,034.2 |
| 1,050 | 275 | 265 | 255 | 255 | 1,079 | 1,079.0 |
| 1,100 | 275 | 275 | 275 | 275 | 1,124 | 1,124.0 |
| 1,150 | 295 | 295 | 295 | 265 | 1,169 | 1,169.0 |
| 1,200 | 300 | 300 | 300 | 300 | 1,216 | 1,216.0 |
4.3. Multiple Solutions
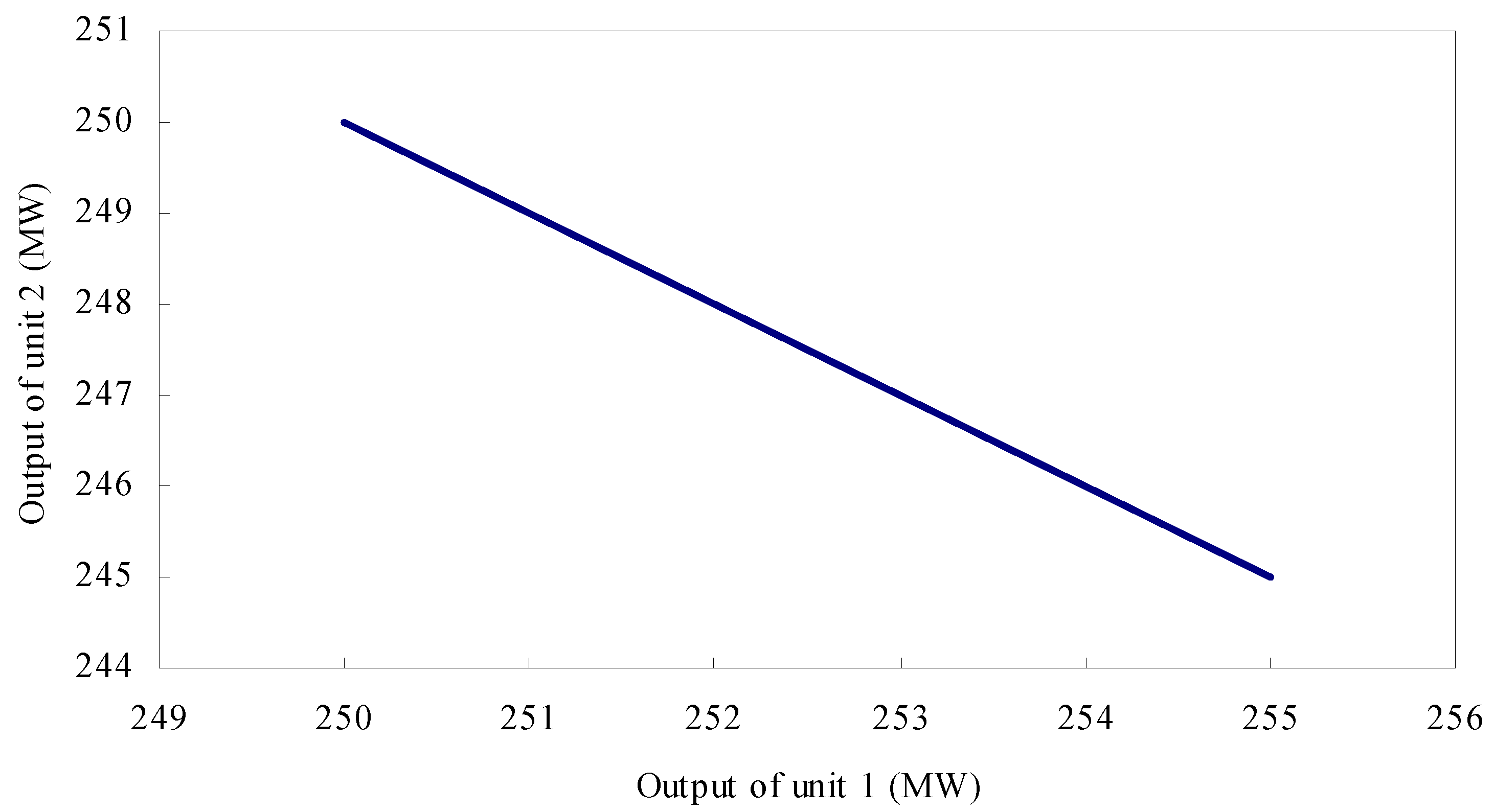
- (1)
- In the case that total electric load is equal to 500 MW (), the optimal solution consumes water discharge of 518 m/s and distributes them to unit 1 and unit 2 (Table 1).Table 2 shows single or multiple solutions under different discrete intervals. When the discrete interval of DP is 100 MW, a single solution is found but it is not optimal compared to the optimal water discharge found from MILP (518 m/s). When the discrete interval is 10 MW, a single optimal solution is located. When the discrete interval decreases to 1 MW, multiple solutions are found and they all reach the optimal discharge. With a smaller interval (0.1 MW), even more optimal solutions are identified.
| Discrete interval | Unit 1 | Unit 2 | Total discharge |
|---|---|---|---|
| Δ (MW) | (MW) | (MW) | (m/s) |
| 100 | 300 | 200 | 521 |
| 10 | 250 | 250 | 518 |
| 1 | 255 | 245 | 518 |
| 254 | 246 | ||
| ⋮ | ⋮ | ||
| 251 | 249 | ||
| 250 | 250 | ||
| 0.1 | 255 | 245 | 518 |
| 254.9 | 245.1 | ||
| ⋮ | ⋮ | ||
| 250.1 | 249.9 | ||
| 250 | 250 |

- (2)
- When total load is set to 650 MW, four multiple solutions spaces are identified as follows.
- (a)
- , and . These ranges, if satisfying OLD constraints, can be verified by the records of the I/O curve, e.g., . Furthermore, we can obtain multiple solutions from , and given any values of and , and .
- (b)
- , and .
- (c)
- , and .
- (d)
- , and .

- (3)
- When the total load is set to 1100 MW, four generation units are used. By using the multiple solution approach, each unit’s output is either 295 MW, 285 MW, 275 MW, 265 MW or 255 MW. That is, if a solution sampled from above values satisfies the OLD constraints, it is an optimal solution. It is shown that the multiple solutions exist in the form of a few scattered points.
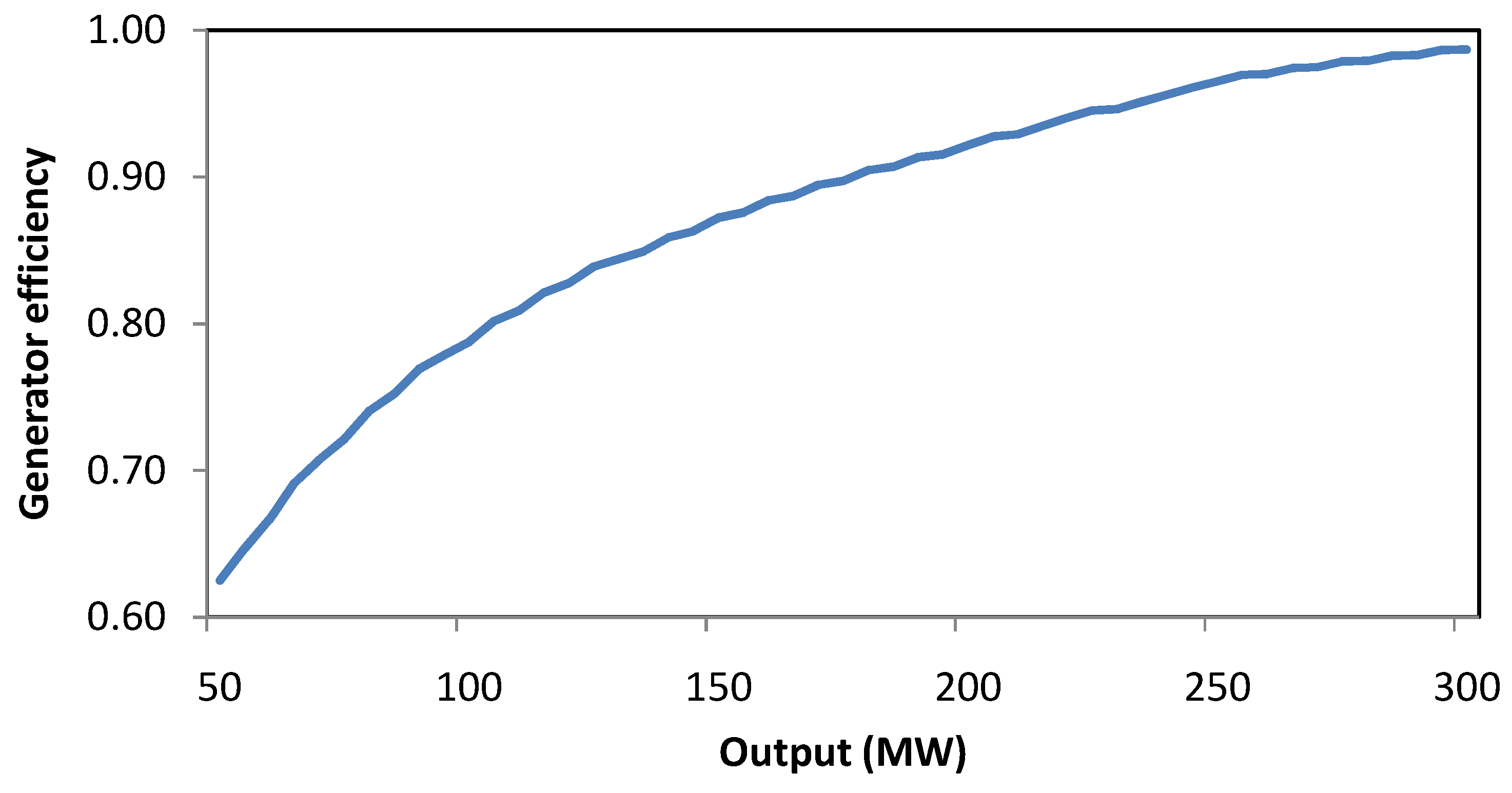
4.4. Non-Linear I/O Function
- (1)
- In the case that total electric load is equal to 500 MW, the optimal solution consumes water discharge of 518 m/s and distributes them to unit 1 and unit 2. Indeed, the multiple optimal solutions are the same as that from the piece-wise linear approximation (Figure 6) because the nonlinear and linear approximation are the same within the range of [240 MW, 255 MW].
- (2)
- In the case that total electric load is equal to 650 MW, (296.7 MW, 286.7 MW, 66.6 MW) is the unique optimal solution.
- (3)
- In the case that total electric load is equal to 1100 MW, a few scattered points, the same as that of piece-wise linear I/O curve, are the multiple optimal solutions.
4.5. Application
- (1)
- Improving unit stability: Multiple solutions provide choices to reduce the readjustment efforts when certain conditions change. For example, the total load L often changes from time to time as shown in Table 3, which lists historical data from a practical operation of the Geheyan hydropower plant. If the decision maker has only a single solution, the solutions with different values of L could be very different from each other and hence the readjustment cost is often high when the plant switches from one total load to another. However, if the decision maker has MOS for each different L, he/she can choose the solutions that require the least adjustment. For example, the decision maker could change only the load for unit 2 and keep the load of unit 3 constant when the total load L changes (because the solutions in the space [75 MW, 85 MW] have the same cost). This choice can improve the stability of the overall system.
| Date | Output of Units (MW) | Load (MW) | |||
|---|---|---|---|---|---|
| Unit 1 | Unit 2 | Unit 3 | Unit 4 | ||
| 2006-3-23 10:30 | 0 | 76.5 | 78.9 | 0 | 155.4 |
| 2006-3-23 10:31 | 0 | 80.9 | 78.9 | 0 | 159.8 |
| 2006-3-23 10:32 | 0 | 81.9 | 78.9 | 0 | 160.8 |
| 2006-3-23 10:33 | 0 | 80.9 | 78.9 | 0 | 159.8 |
- (2)
- Avoiding unit adjustment over the vibration area: For example, the current total load is MW and the I/O function is piece-wise linear. We can apply our algorithm to find multiple solutions for this case. The MOS include the following two solutions:Solution 1: MW, MW, MW and MW.Solution 2: MW, MW, MW and MW.
5. Conclusions
Appendix
Finding an Optimal Solution Using Lagrangian Relaxation
5.1. Finding a Single Solution Using Mixed Integer Linear Programming
5.2. EXAMPLE 3D in [4]
| Value | Unit 1 | Unit 2 | Unit 3 |
|---|---|---|---|
| A | 749.55 | 1,285.0 | 1,531.0 |
| B | 6.95 | 7.051 | 6.531 |
| C | |||
| D | |||
| Minimum (MW) | 320 | 300 | 275 |
| Maximum (MW) | 800 | 1,200 | 1,100 |
Acknowledgements
References
- Demirba, A. Global renewable energy resources. Energy Sources Part A 2006, 28, 779–792. [Google Scholar] [CrossRef]
- Cheng, C.; Liao, S.; Tang, Z.; Zhao, M. Comparison of particle swarm optimization and dynamic programming for large scale hydro unit load dispatch. Energy Convers. Manag. 2009, 50, 3007–3014. [Google Scholar] [CrossRef]
- Guo, S. Reservoir Comprehensive and Automatic Control Systems [In Chinese]; Wuhan University of Hydraulic and Electric Engineering Press: Wuhan, China, 2000. [Google Scholar]
- Wood, A.J.; Wollenberg, B.F. Power Generation, Operation, and Control; John Wiley and Sons: Hoboken, NJ, USA, 1996. [Google Scholar]
- Yi, J.; Labadie, J.W.; Stitt, S. Dynamic optimal unit commitment and loading in hydropower systems. J. Water Resour. Plan. Manag. 2003, 129, 388–398. [Google Scholar] [CrossRef]
- Bortoni, E.C.; Bastos, G.S.; Souza, L.E. Optimal load distribution between units in a power plant. ISA Trans. 2007, 46, 533–539. [Google Scholar] [CrossRef] [PubMed]
- Chang, G.W.; Aganagic, M.; Waight, J.G.; Medina, J.; Burton, T.; Reeves, S.; Christoforidis, M. Experiences with mixed integer linear programming-based approaches in short-term hydro scheduling. IEEE Trans. Power Syst. 2001, 16, 743–749. [Google Scholar] [CrossRef]
- Borghetti, A.; D’Ambrosio, C.; Lodi, A.; Martello, S. An MILP approach for short-term hydro scheduling and unit commitment with head-dependent reservoir. IEEE Trans. Power Syst. 2008, 23, 1115–1124. [Google Scholar] [CrossRef]
- D’Ambrosio, C.; Lodi, A.; Martello, S. Piecewise linear approximation of functions of two variables in MILP models. Oper. Res. Lett. 2010, 38, 39–46. [Google Scholar] [CrossRef]
- Pérez-Díaz, J.I.; Wilhelmi, J.R.; Sánchez-Fernández, J.Á. Short-term operation scheduling of a hydropower plant in the day-ahead electricity market. Electr. Power Syst. Res. 2010, 80, 1535–1542. [Google Scholar] [CrossRef]
- Catalao, J.P.S.; Pousinho, H.M.I.; Mendes, V.M.F. Scheduling of head-dependent cascaded hydro systems: Mixed-integer quadratic programming approach. Energy Convers. Manag. 2010, 51, 524–530. [Google Scholar] [CrossRef]
- Li, T.; Shahidehpour, M. Price-based unit commitment: A case of lagrangian relaxation versus mixed integer programming. IEEE Trans. Power Syst. 2005, 20, 2015–2025. [Google Scholar] [CrossRef]
- Catalao, J.P.S.; Pousinho, H.M.I.; Contreras, J. Optimal hydro scheduling and offering strategies considering price uncertainty and risk management. Energy 2012, 37, 237–244. [Google Scholar] [CrossRef]
- Snyder, W.L.; Powell, H.D.; Rayburn, J.C. Dynamic programming approach to unit commitment. IEEE Trans. Power Syst. 1987, 2, 339–348. [Google Scholar] [CrossRef]
- Sheble, G.B.; Fahd, G.N. Unit commitment literature synopsis. IEEE Trans. Power Syst. 1995, 9, 128–135. [Google Scholar] [CrossRef]
- Pérez-Díaz, J.I.; Wilhelmi, J.R.; Arévalo, L.A. Optimal short-term operation schedule of a hydropower plant in a competitive electricity market. Energy Convers. Manag. 2010, 51, 2955–2966. [Google Scholar] [CrossRef]
- Zhuang, F.; Galiana, F.D. Toward a more rigorous and practical unit commitment by Lagrangian relaxation. IEEE Trans. Power Syst. 1988, 3, 763–772. [Google Scholar] [CrossRef]
- Cheng, C.P.; Liu, C.W.; Liu, C.C. Unit commitment by Lagrangian relaxation and genetic algorithms. IEEE Trans. Power Syst. 2000, 15, 707–714. [Google Scholar] [CrossRef]
- Siu, T.K.; Nash, G.A.; Shawwash, Z.K. A practical hydro, dynamic unit commitment and loading model. IEEE Trans. Power Syst. 2001, 16, 301–306. [Google Scholar] [CrossRef]
- Arce, A.; Ohishi, T.; Soares, S. Optimal dispatch of generating units of Itaipu hydroelectric plant. IEEE Trans. Power Syst. 2002, 17, 154–158. [Google Scholar] [CrossRef]
- Senjyu, T.; Shimabukuro, K.; Uezato, K.; Funabashi, T. A fast technique for unit commitment problem by extended priority list. IEEE Trans. Power Syst. 2003, 18, 882–888. [Google Scholar] [CrossRef]
- Lakshminarasimman, L.; Subramanian, S. A modified hybrid differential evolution for short-term scheduling of hydrothermal power systems with cascaded reservoirs. Energy Convers. Manag. 2008, 49, 2513–2521. [Google Scholar] [CrossRef]
- Wang, J. Short-term generation scheduling model of Fujian hydro system. Energy Convers. Manag. 2009, 50, 1085–1094. [Google Scholar] [CrossRef]
- Yu, B.; Yuan, X.; Wang, J. Short-term hydro-thermal scheduling using particle swarm optimization method. Energy Convers. Manag. 2007, 48, 1902–1908. [Google Scholar] [CrossRef]
- Tsung-Ying, L. Short term hydroelectric power system scheduling with wind turbine generators using the multi-pass iteration particle swarm optimization approach. Energy Convers. Manag. 2008, 49, 751–760. [Google Scholar]
- Mahor, A.; Rangnekar, S. Short term generation scheduling of cascaded hydro electric system using novel self adaptive inertia weight PSO. Int. J. Electr. Power Energy Syst. 2012, 34, 1–9. [Google Scholar] [CrossRef]
- Fu, X.; Li, A.; Wang, L.; Ji, C. Short-term scheduling of cascade reservoirs using an immune algorithm-based particle swarm optimization. Comput. Math. Appl. 2011, 62, 2463–2471. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, Y.; Xie, J.; Qi, X.; Nie, H.; Su, A. Optimal self-scheduling of hydro producer in the electricity market. Energy Convers. Manag. 2010, 51, 2523–2530. [Google Scholar] [CrossRef]
- Liu, P.; Guo, S.; Xiong, L.; Li, W.; Zhang, H. Deriving reservoir refill operating rules by using the proposed DPNS model. Water Resour. Manag. 2006, 20, 337–357. [Google Scholar] [CrossRef]
- Tsai, J.; Lin, M.; Hu, Y. Finding multiple solutions to general integer linear programs. Eur. J. Oper. Res. 2008, 184, 802–809. [Google Scholar] [CrossRef]
- Lee, J.; Chiang, H.D. A dynamical trajectory-based methodology for systematically computing multiple optimal solutions of general nonlinear programming problems. IEEE Trans. Autom. Control 2004, 49, 888–899. [Google Scholar] [CrossRef]
- Byers, T.H.; Waterman, M.S. Determining all optimal and near-optimal solutions when solving shortest-path problems by dynamic-programming. Oper. Res. 1984, 32, 1381–1384. [Google Scholar] [CrossRef]
- Brits, R.; Engelbrecht, A.P.; van den Bergh, F. Locating multiple optima using particle swarm optimization. Appl. Math. Comput. 2007, 189, 1859–1883. [Google Scholar] [CrossRef]
- Liu, P.; Cai, X.; Guo, S. Deriving multiple near-optimal solutions to deterministic reservoir operation problems. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Nillsson, O.; Sjelvgren, D. Hydro unit start-up costs and their impact on the short term scheduling strategies of Swedish power producers. IEEE Trans. Power Syst. 1997, 12, 38–43. [Google Scholar] [CrossRef]
- Conejo, A.J.; Arroyo, J.M.; Contreras, J.; Villamor, F.A. Self-scheduling of a hydro producer in a pool-based electricity market. IEEE Trans. Power Syst. 2002, 17, 1265–1272. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Powell, W. Approximate Dynamic Programming: Solving the Curses of Dimensionality; Wiley Interscience: Hoboken, NJ, USA, 2007. [Google Scholar]
- Frieze, A.M. Shortest path algorithms for knapsack type problems. Math. Prog. 1976, 11, 150–157. [Google Scholar] [CrossRef]
- LINGO Release 9.0.; LINDO System Inc.: Chicago, IL, USA, 2004.
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Liu, P.; Nguyen, T.-D.; Cai, X.; Jiang, X. Finding Multiple Optimal Solutions to Optimal Load Distribution Problem in Hydropower Plant. Energies 2012, 5, 1413-1432. https://doi.org/10.3390/en5051413
Liu P, Nguyen T-D, Cai X, Jiang X. Finding Multiple Optimal Solutions to Optimal Load Distribution Problem in Hydropower Plant. Energies. 2012; 5(5):1413-1432. https://doi.org/10.3390/en5051413
Chicago/Turabian StyleLiu, Pan, Tri-Dung Nguyen, Ximing Cai, and Xinhao Jiang. 2012. "Finding Multiple Optimal Solutions to Optimal Load Distribution Problem in Hydropower Plant" Energies 5, no. 5: 1413-1432. https://doi.org/10.3390/en5051413
APA StyleLiu, P., Nguyen, T.-D., Cai, X., & Jiang, X. (2012). Finding Multiple Optimal Solutions to Optimal Load Distribution Problem in Hydropower Plant. Energies, 5(5), 1413-1432. https://doi.org/10.3390/en5051413