Induced Voltages Ratio-Based Algorithm for Fault Detection, and Faulted Phase and Winding Identification of a Three-Winding Power Transformer



Abstract
:1. Introduction
2. Fault Detection, and Faulted Phase and Winding Identification of a Three-Winding Transformer Based on the Induced Voltages
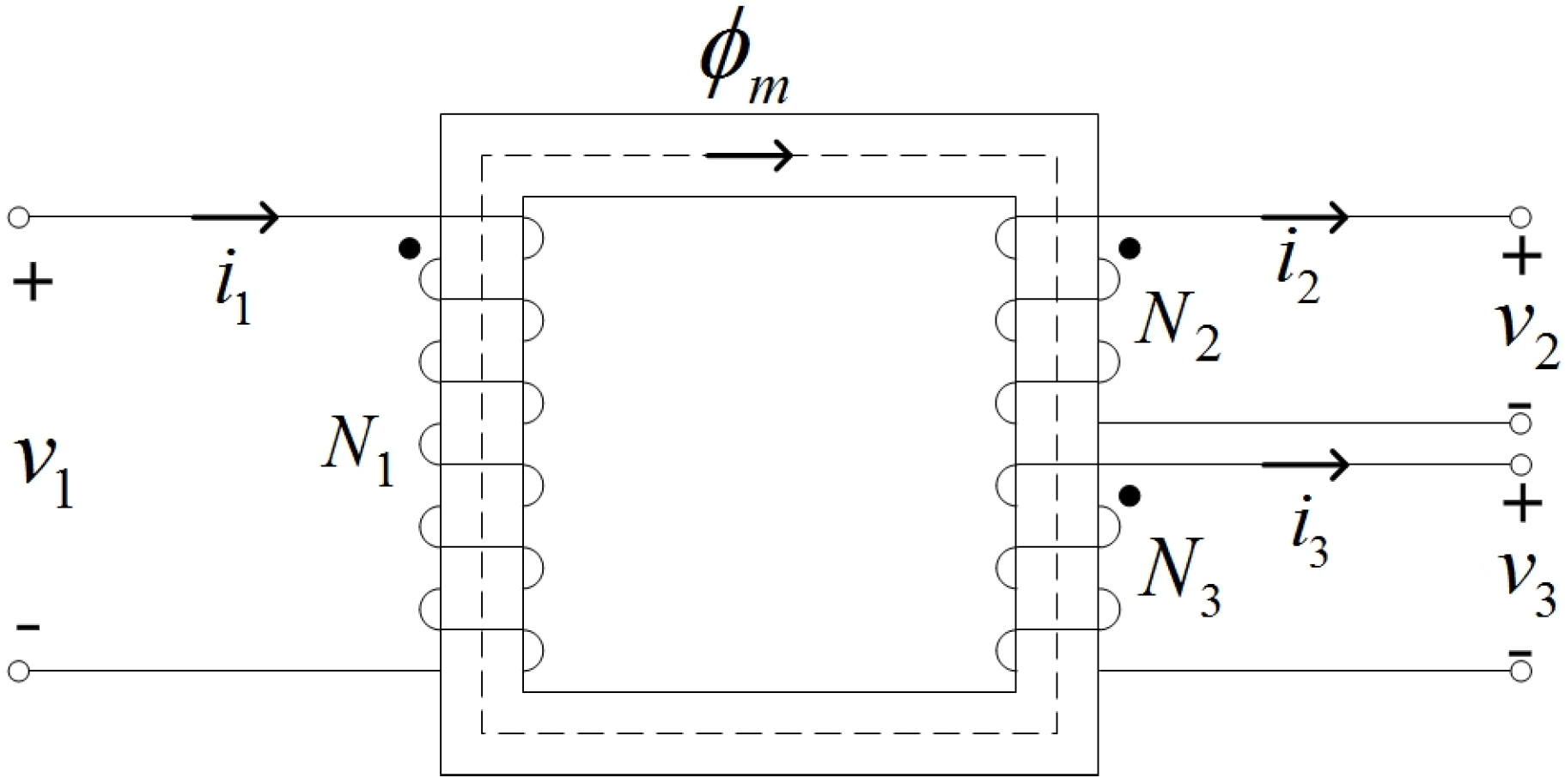
2.1. Three-Winding Single-Phase Transformer



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
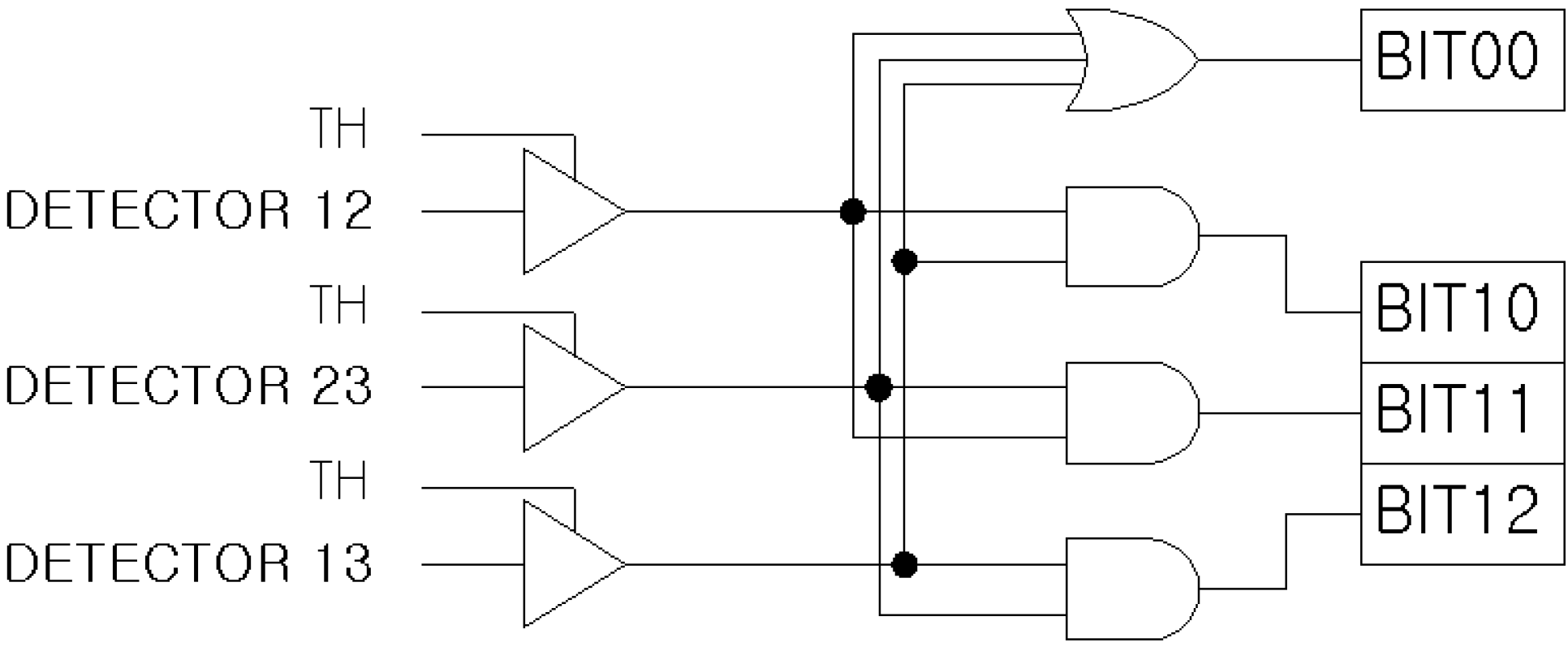
| BIT00 | Fault detection | ||
| 0 | No internal fault | ||
| 1 | Internal fault | ||
| BIT10 | BIT11 | BIT12 | Faulted winding identification |
| 1 | 0 | 0 | Primary winding |
| 0 | 1 | 0 | Secondary winding |
| 0 | 0 | 1 | Tertiary winding |
| 1 | 1 | 1 | Two or three winding |
| Other cases | Unidentified | ||
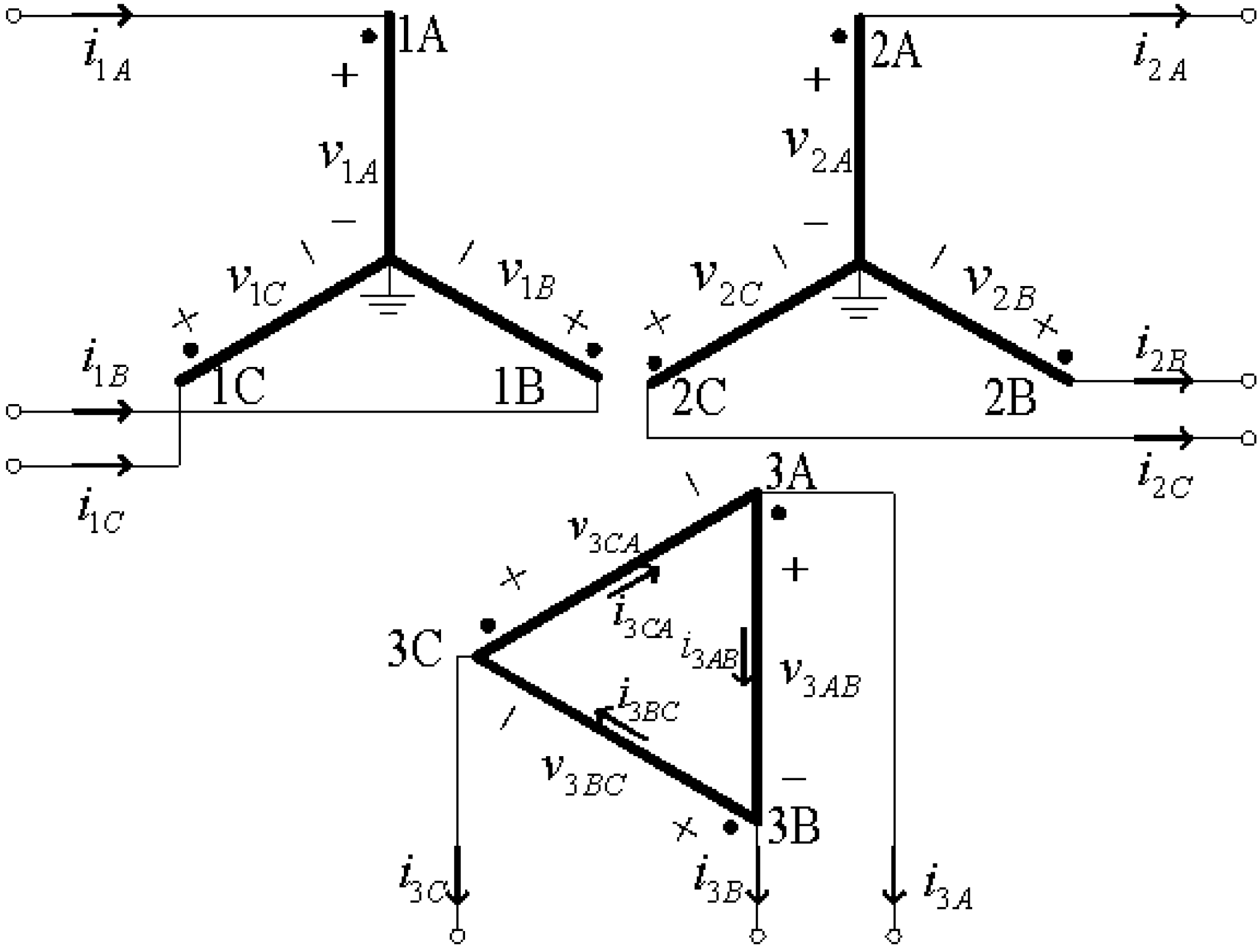
2.2. Three-Winding Three-Phase Y-Y-Δ Transformer


| BIT 00 | Fault detection | ||
| 0 | No internal fault | ||
| 1 | Internal fault | ||
| BIT10 | BIT11 | BIT12 | Faulted phase identification |
| 0 | 0 | 0 | No phase |
| 1 | 0 | 0 | A phase |
| 0 | 1 | 0 | B phase |
| 0 | 0 | 1 | C phase |
| 1 | 1 | 0 | A phase and B phase |
| 0 | 1 | 1 | B phase and C phase |
| 1 | 0 | 1 | C phase and A phase |
| 1 | 1 | 1 | All phases |
| BIT20 | BIT21 | BIT22 | Faulted phase identification |
| 0 | 0 | 0 | No phase |
| 1 | 1 | 0 | A phase |
| 0 | 1 | 1 | B phase |
| 1 | 0 | 1 | C phase |
| 1 | 1 | 1 | Two or three phases |
| Other cases | Unidentified | ||
| BIT30 | BIT31 | BIT32 | Faulted winding identification |
| 1 | 0 | 0 | Primary winding |
| 0 | 1 | 0 | Secondary winding |
| 0 | 0 | 1 | Tertiary winding |
| 1 | 1 | 1 | Two or three windings |
| Other cases | Unidentified | ||
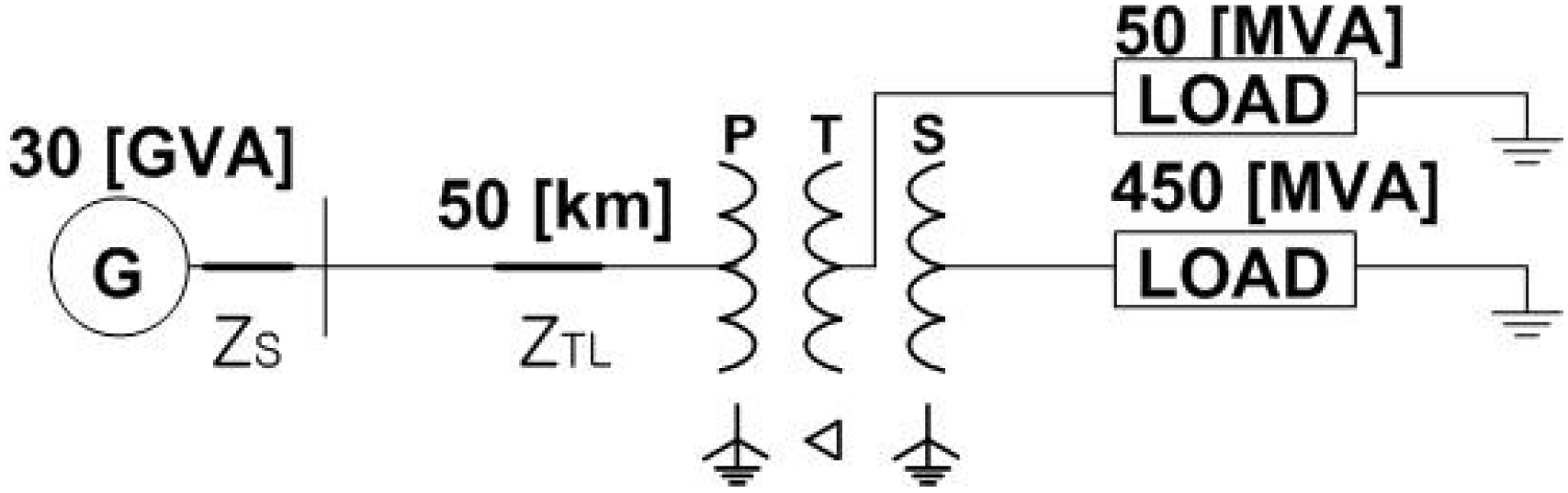
3. Case Studies


3.1. Magnetic Inrush
| Energisation angle (°) | 0, 90 |
| Remanent flux (%) | 0, 30, 50, 80 |
| Load | No load, full load |




3.2. Internal Winding Faults


3.3. Over-Excitation


3.4. Different Core Characteristics
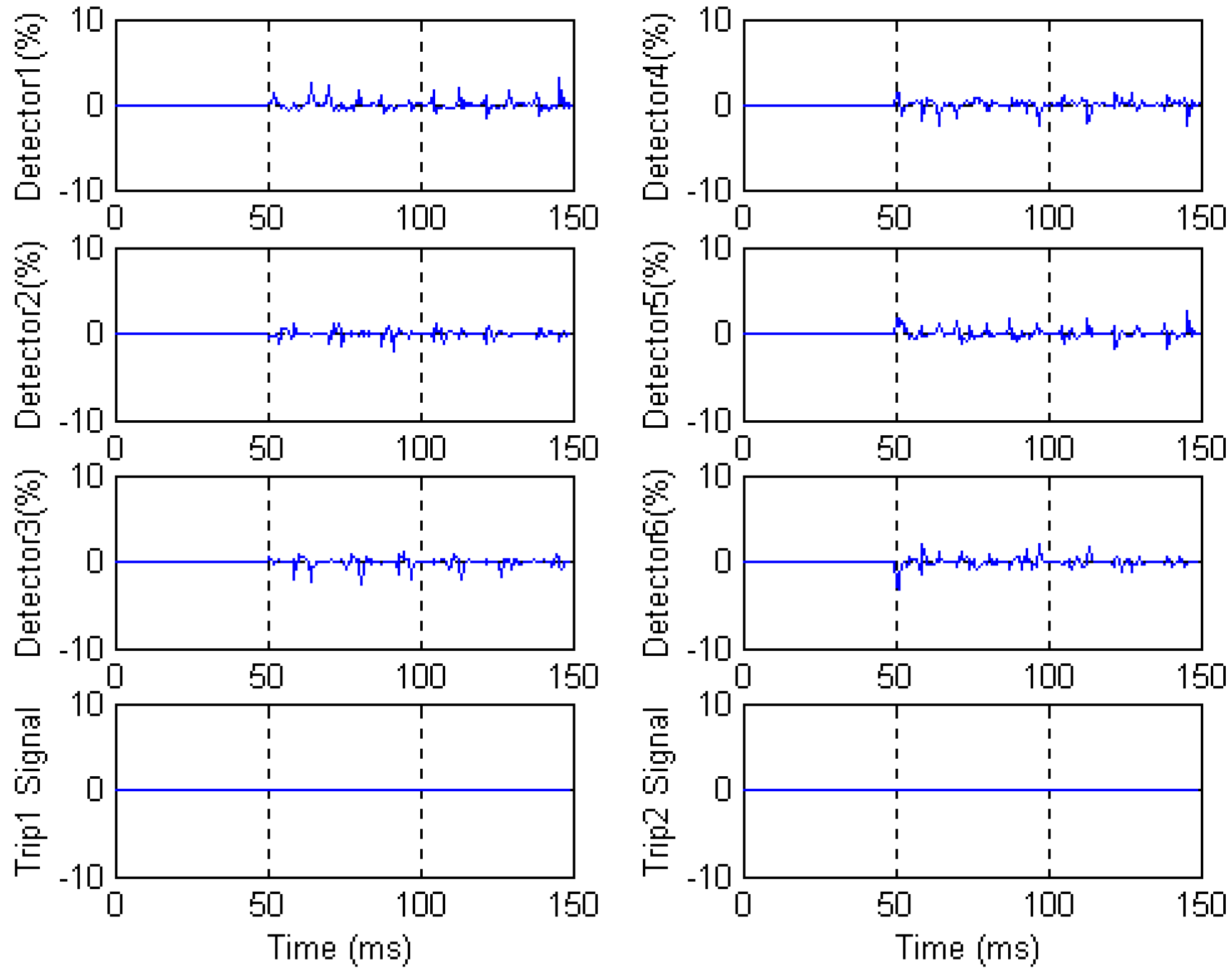
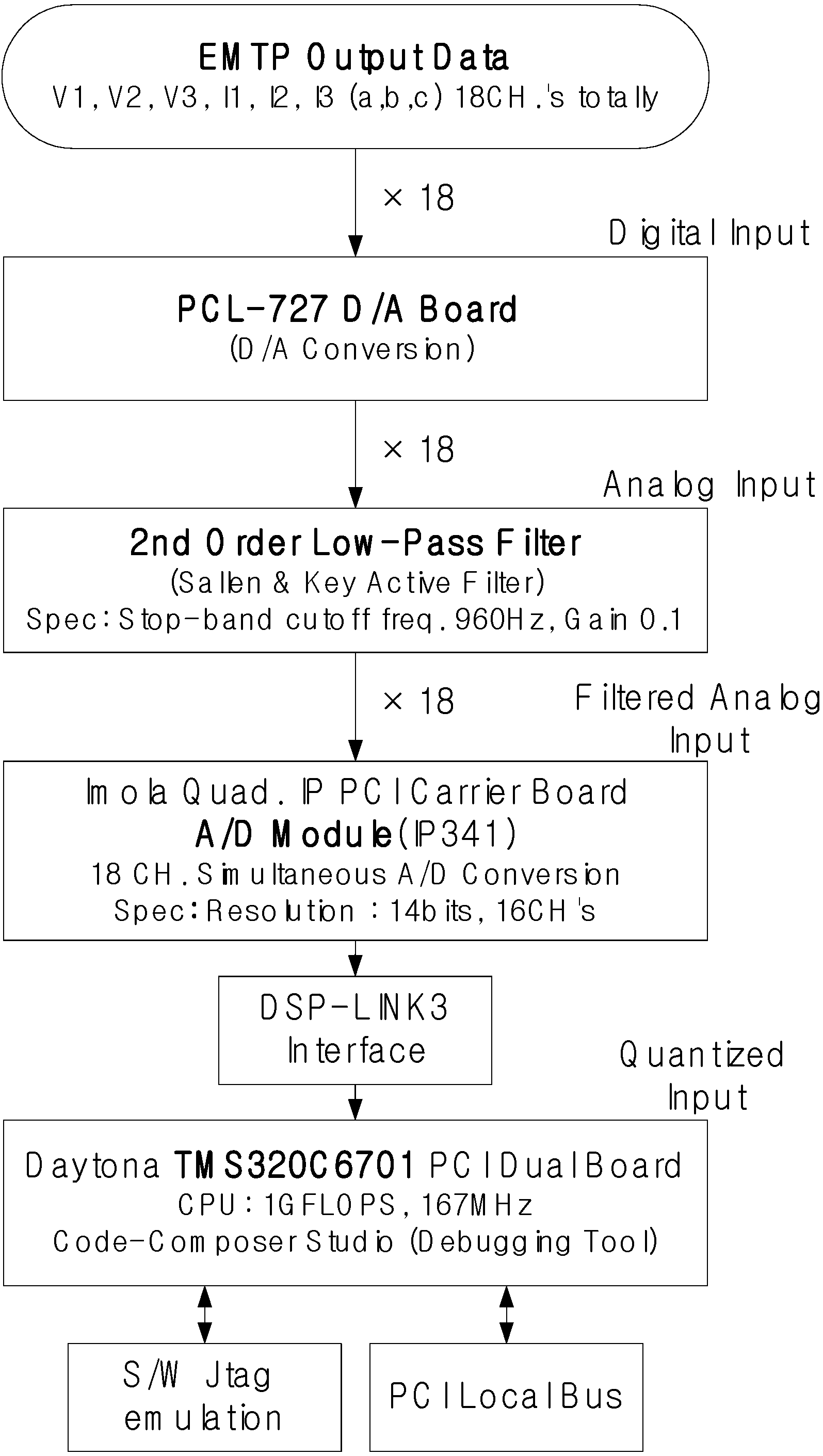
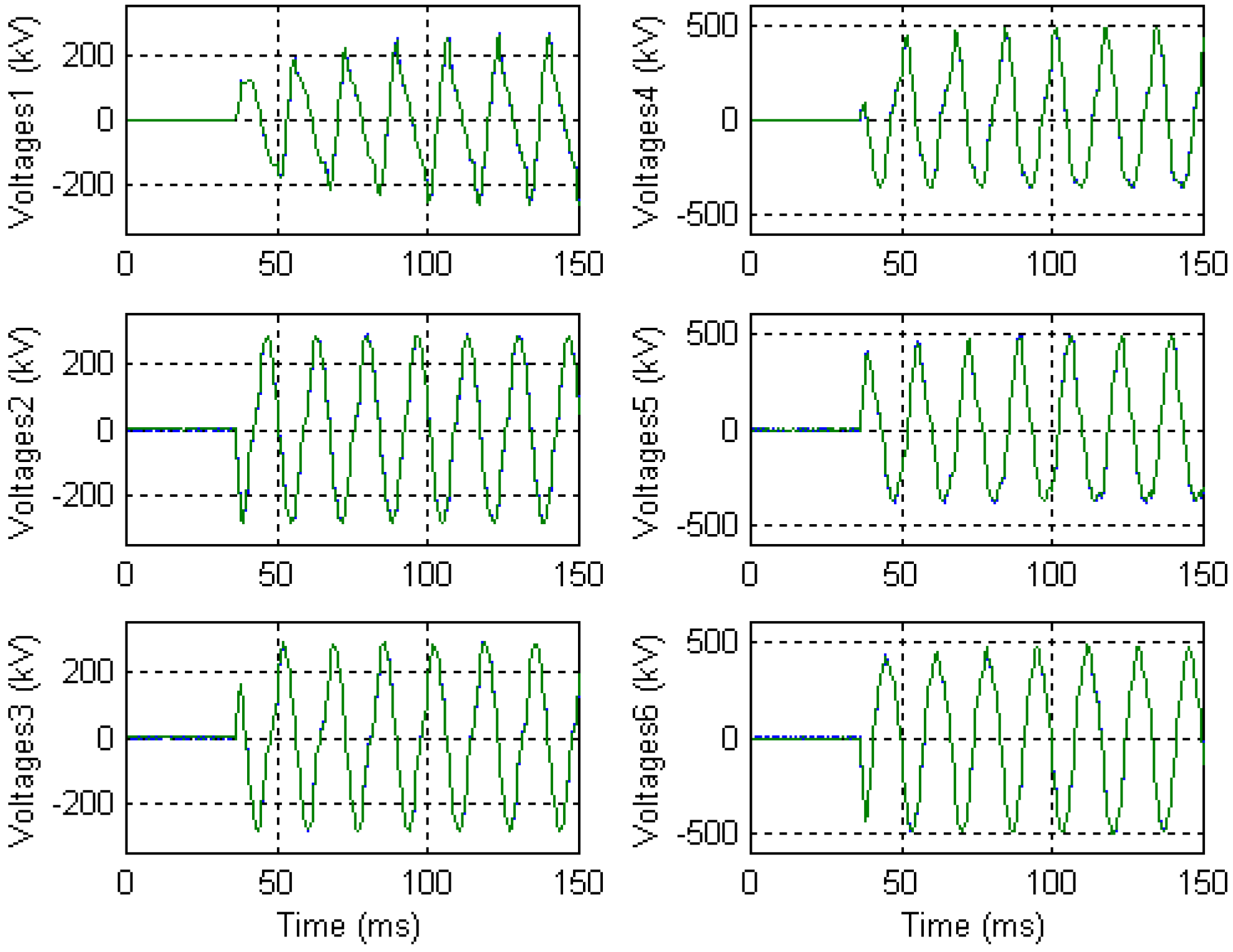
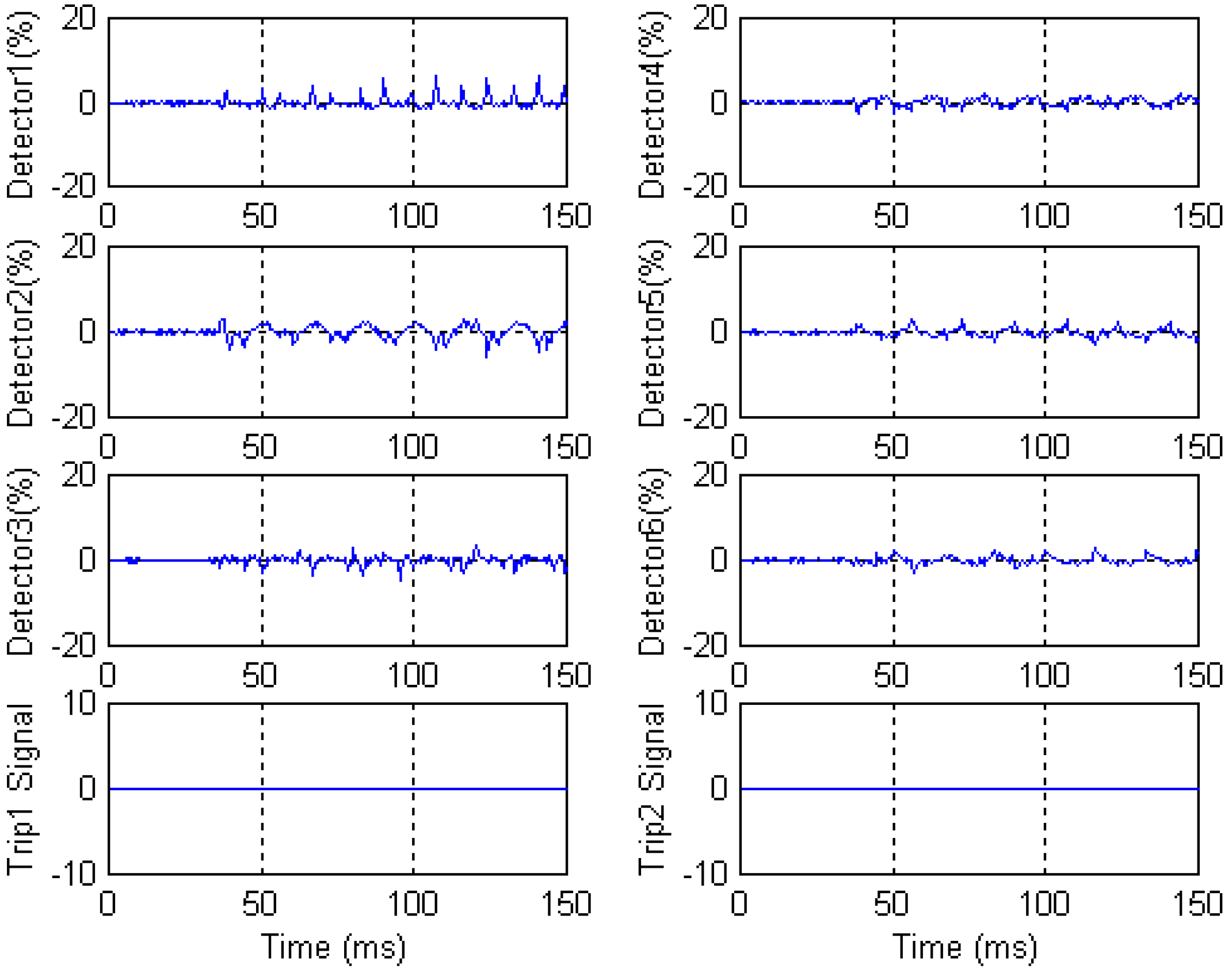
4. Hardware Implementation Test





5. Conclusions
Acknowledgements
Author Contributions
Nomenclature
| Symbols | Definition |
| v1, v2, v3 | Voltages |
| i1, i2, i3 | Currents |
| R1, R2, R3 | Winding resistances |
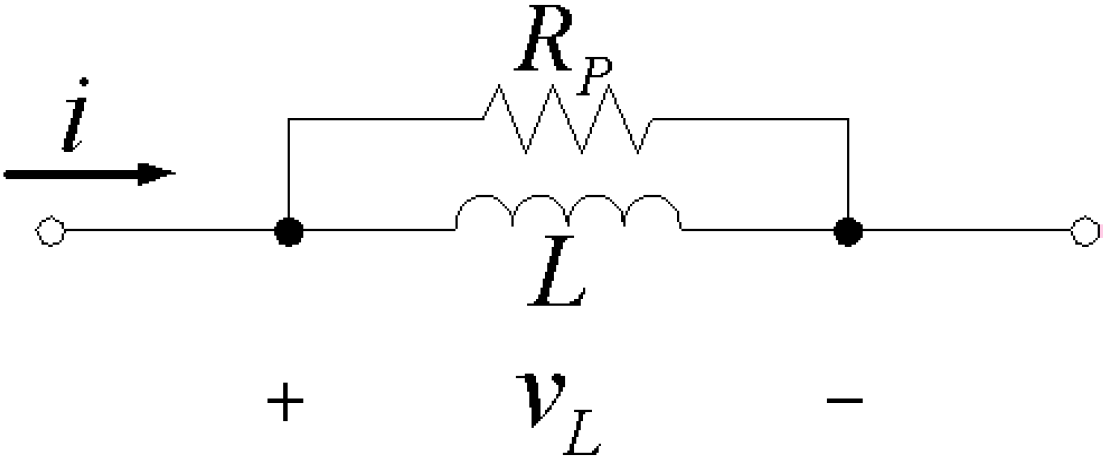
| Ll1, Ll2, Ll3 | Leakage inductances |
| e1, e2, e3 | Induced voltages |
| V1, V2 | Rated voltages |
| ϕm | Mutual flux |
| N1, N2, N3 | Number of turns (for 3 ϕ) |
| v1A, v1B, v1C | Primary voltages (for 3 ϕ) |
| i1A, i1B, i1C | Primary currents (for 3 ϕ) |
| v2A, v2B, v2C | Secondary voltages (for 3 ϕ) |
| i2A, i2B, i2C | Secondary currents (for 3 ϕ) |
| v3AB, v3BC, v3CA | Tertiary voltages (for 3 ϕ) |
| i3AB, i3BC, i3CA | Tertiary winding currents (for 3 ϕ) |
| i3A, i3B, i3C | Line currents (for 3 ϕ) |
| R1A, R1B, R1C | Primary winding resistances (for 3 ϕ) |
| Ll1A, Ll1B, Ll1C | Primary leakage inductances (for 3 ϕ) |
| e1A, e1B, e1C | Primary induced voltages (for 3 ϕ) |
| R2A, R2B, R2C | Secondary winding resistances (for 3 ϕ) |
| Ll2A, Ll2B, Ll2C | Secondary leakage inductances (for 3 ϕ) |
| e2A, e2B, e2C | Secondary induced voltages (for 3 ϕ) |
| R3AB, R3BC, R3CA | Tertiary winding resistances (for 3 ϕ) |
| Ll3AB, Ll3BC, Ll3CA | Tertiary leakage inductances (for 3 ϕ) |
| e3AB, e3BC, e3CA | Tertiary induced voltages (for 3 ϕ) |
| V1AB, V1BC, V1CA, V2AB, V2BC, V2CA | Rated phase-to-phase voltages (for 3 ϕ) |
Conflicts of Interest
References
- Phadke, A.G.; Thorp, J.S. Computer Relaying for Power Systems; Research Studies Press: Hertfordshire, UK, 1988. [Google Scholar]
- Al-Fakhri, B.; Elagtal, I.A. A Unique Current Differential Based Algorithm for Protection of Three-Winding Transformers and Busbars. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting, Columbus, OH, USA, 28 January–1 February 2001; pp. 687–692.
- Hayward, C.D. Harmonic-current-restrained relays for transformer differential protection. Am. Inst. Electr. Eng. Trans. 1941, 60, 377–382. [Google Scholar] [CrossRef]
- Mathews, C.W. An improved transformer differential relay. Electr. Eng. 1954, 73, 645–650. [Google Scholar] [CrossRef]
- Sharp, R.L.; Glassburn, W.E. A transformer differential relay with second-harmonic restraint. Trans. Power Appar. Syst. 1958, 77, 913–918. [Google Scholar] [CrossRef]
- Einvall, C.H.; Linders, J.R. A three-phase differential relay for transformer protection. IEEE Trans. Power Appar. Syst. 1975, 94, 1971–1980. [Google Scholar] [CrossRef]
- Sachdev, M.S.; Sidhu, T.S.; Wood, H.C. A digital relaying algorithm for detecting transformer winding faults. IEEE Trans. Power Deliv. 1989, 4, 1638–1648. [Google Scholar] [CrossRef]
- Kang, Y.C.; Lee, B.E.; Kang, S.H.; Kim, S.S.; Lee, J.K. A Transformer Protective Relaying Algorithm Using the Ratio of Induced Voltages. In Proceedings of the IEEE 2001 Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001; pp. 109–114.
- Kang, Y.C.; Lee, B.E.; Kang, S.H. Transformer protection relay based on the induced voltages. Int. J. Electr. Power Energy Syst. 2007, 29, 281–289. [Google Scholar] [CrossRef]
- Saleh, S.A.; Rahman, M.A. Real-time testing of a WPT-based protection algorithm for three-phase power transformers. IEEE Trans. Ind. Appl. 2005, 41, 1125–1132. [Google Scholar] [CrossRef]
- Saleh, S.A.; Scaplen, B.; Rahman, M.A. A new implementation method of wavelet-packet-transform differential protection for power transformers. IEEE Trans. Ind. Appl. 2011, 47, 1003–1012. [Google Scholar] [CrossRef]
- Tripathy, M.; Maheshwari, R.P.; Verma, H.K. Radial basis probabilistic neural network for differential protection of power transformer. IET Gener. Trans. Distrib. 2008, 2, 43–52. [Google Scholar] [CrossRef]
- Tripathy, M.; Maheshwari, R.P.; Verma, H.K. Power transformer differential protection based on optimal probabilistic neural network. IEEE Trans. Power Deliv. 2010, 25, 102–112. [Google Scholar] [CrossRef]
- Oliveira, L.M.R.; Cardoso, A.J.M. Application of park’s power components to the differential protection of three-phase transformers. Electr. Power Syst. Res. 2012, 83, 203–211. [Google Scholar] [CrossRef]
- Oliveira, L.M.R.; Cardoso, A.J.M. Extended park’s vector approach-based differential protection of three-phase power transformers. IET Electr. Power Appl. 2012, 6, 463–472. [Google Scholar] [CrossRef]
- Alencar, R.J.N.; Bezerra, U.H.; Ferreira, A.M.D. A method to identify inrush currents in power transformers protection based on the differential current gradient. Electr. Power Syst. Res. 2014, 111, 78–84. [Google Scholar] [CrossRef]
- Babnik, T.; Gubina, F. Fast power transformer fault classification methods based on protection signals. IEE Proc. Gener. Transm. Distrib. 2003, 150, 205–210. [Google Scholar] [CrossRef]
- Ngaopitakkul, A.; Kunakorn, A. Internal fault classification in transformer windings using combination of discrete wavelet transforms and back-propagation neural networks. Int. J. Control. Autom. Syst. 2006, 4, 365–371. [Google Scholar]
- Bastard, P.; Bertrand, P.; Meunier, M. A transformer model for winding fault studies. IEEE Trans. Power Deliv. 1994, 9, 690–699. [Google Scholar] [CrossRef]
- Dommel, H.W. ElectroMagnetic Transients Program. Reference Manual (EMTP Theory Book); Bonneville Power Administration: Portland, OR, USA, 1986. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lee, B.E.; Park, J.-W.; Crossley, P.A.; Kang, Y.C. Induced Voltages Ratio-Based Algorithm for Fault Detection, and Faulted Phase and Winding Identification of a Three-Winding Power Transformer. Energies 2014, 7, 6031-6049. https://doi.org/10.3390/en7096031
Lee BE, Park J-W, Crossley PA, Kang YC. Induced Voltages Ratio-Based Algorithm for Fault Detection, and Faulted Phase and Winding Identification of a Three-Winding Power Transformer. Energies. 2014; 7(9):6031-6049. https://doi.org/10.3390/en7096031
Chicago/Turabian StyleLee, Byung Eun, Jung-Wook Park, Peter A. Crossley, and Yong Cheol Kang. 2014. "Induced Voltages Ratio-Based Algorithm for Fault Detection, and Faulted Phase and Winding Identification of a Three-Winding Power Transformer" Energies 7, no. 9: 6031-6049. https://doi.org/10.3390/en7096031
APA StyleLee, B. E., Park, J.-W., Crossley, P. A., & Kang, Y. C. (2014). Induced Voltages Ratio-Based Algorithm for Fault Detection, and Faulted Phase and Winding Identification of a Three-Winding Power Transformer. Energies, 7(9), 6031-6049. https://doi.org/10.3390/en7096031