
Numerical Analysis on the Optimization of Hydraulic Fracture Networks


Abstract
:1. Introduction
2. The Model
2.1. Basic Equations
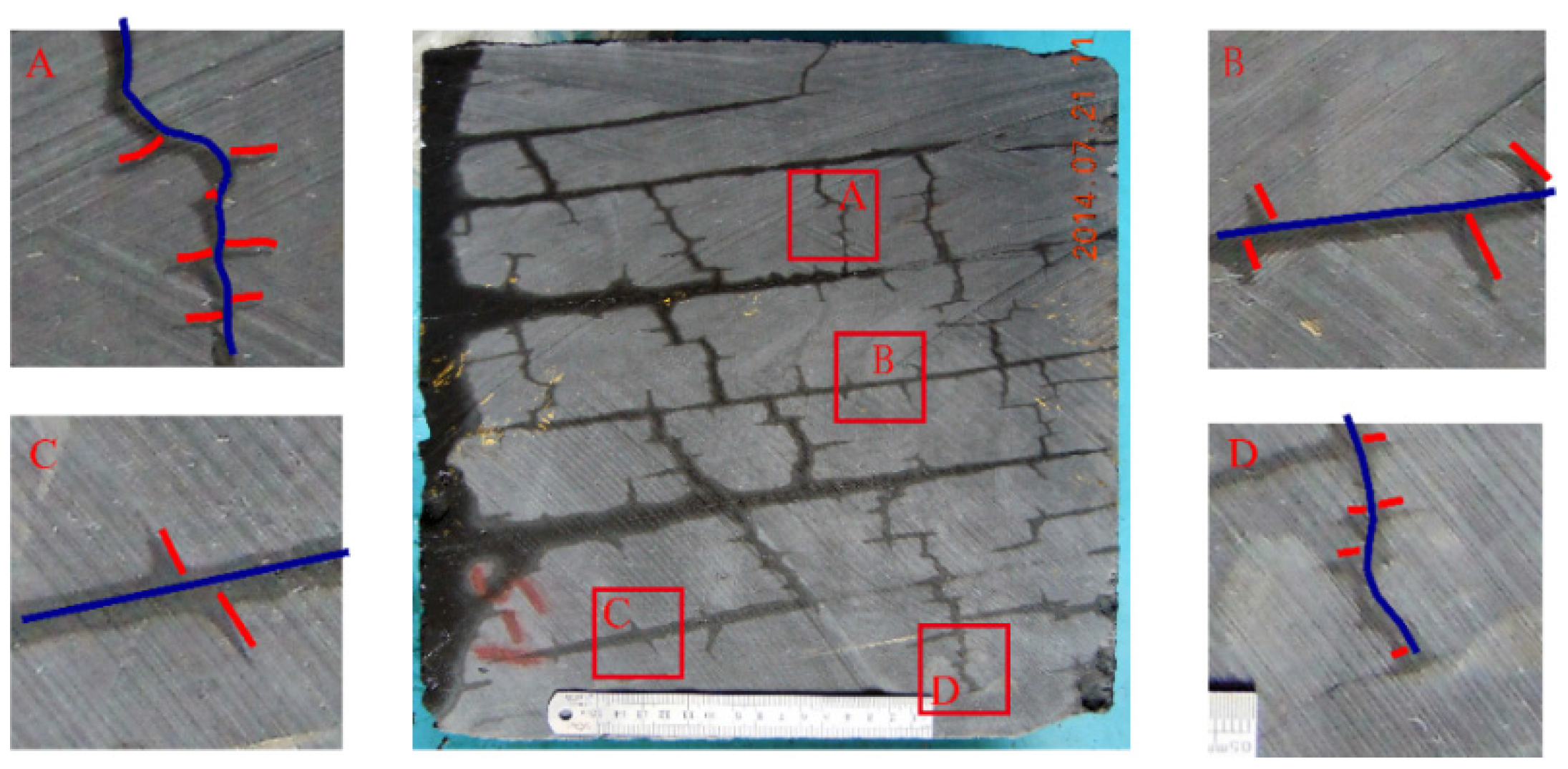
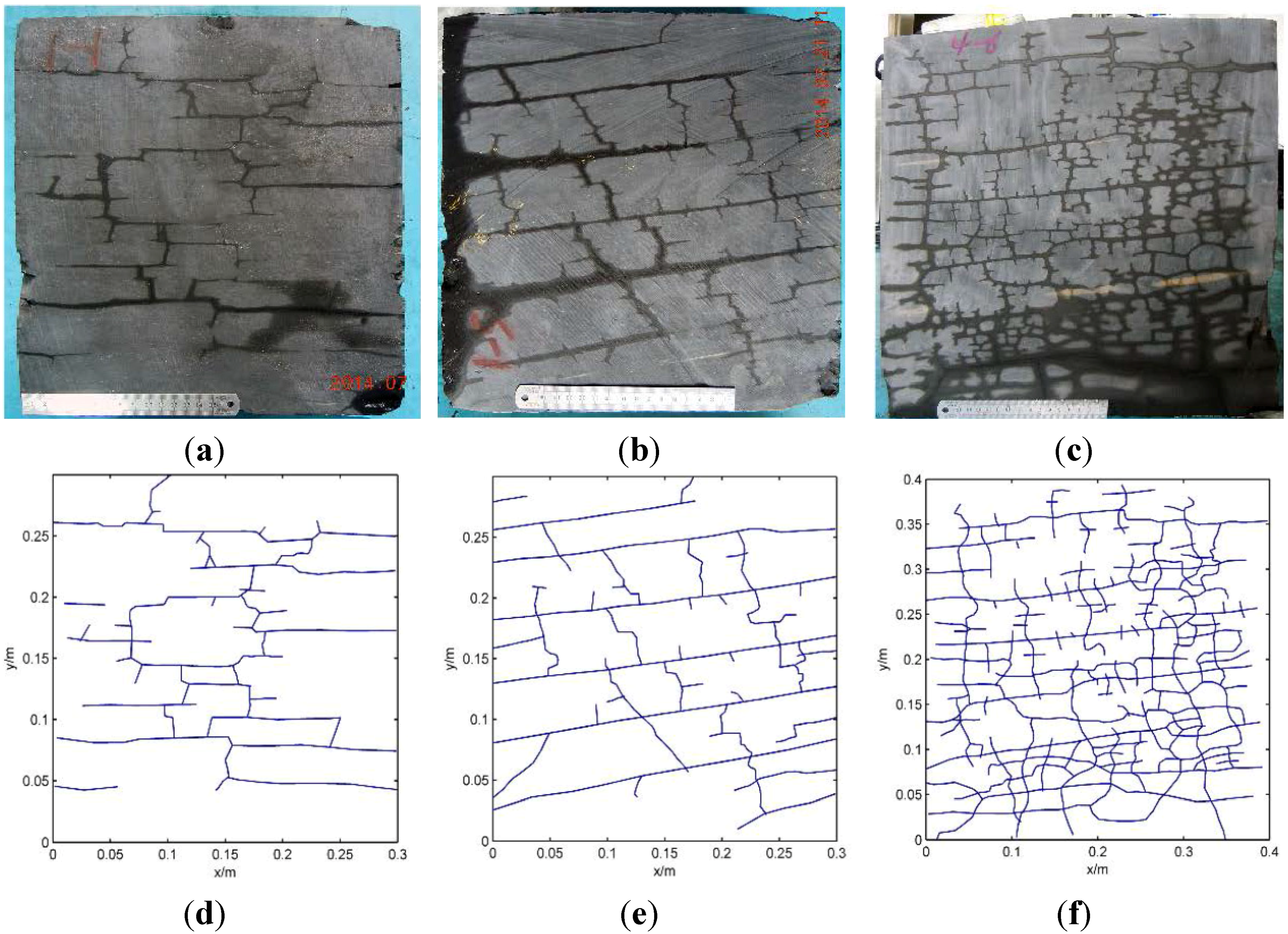
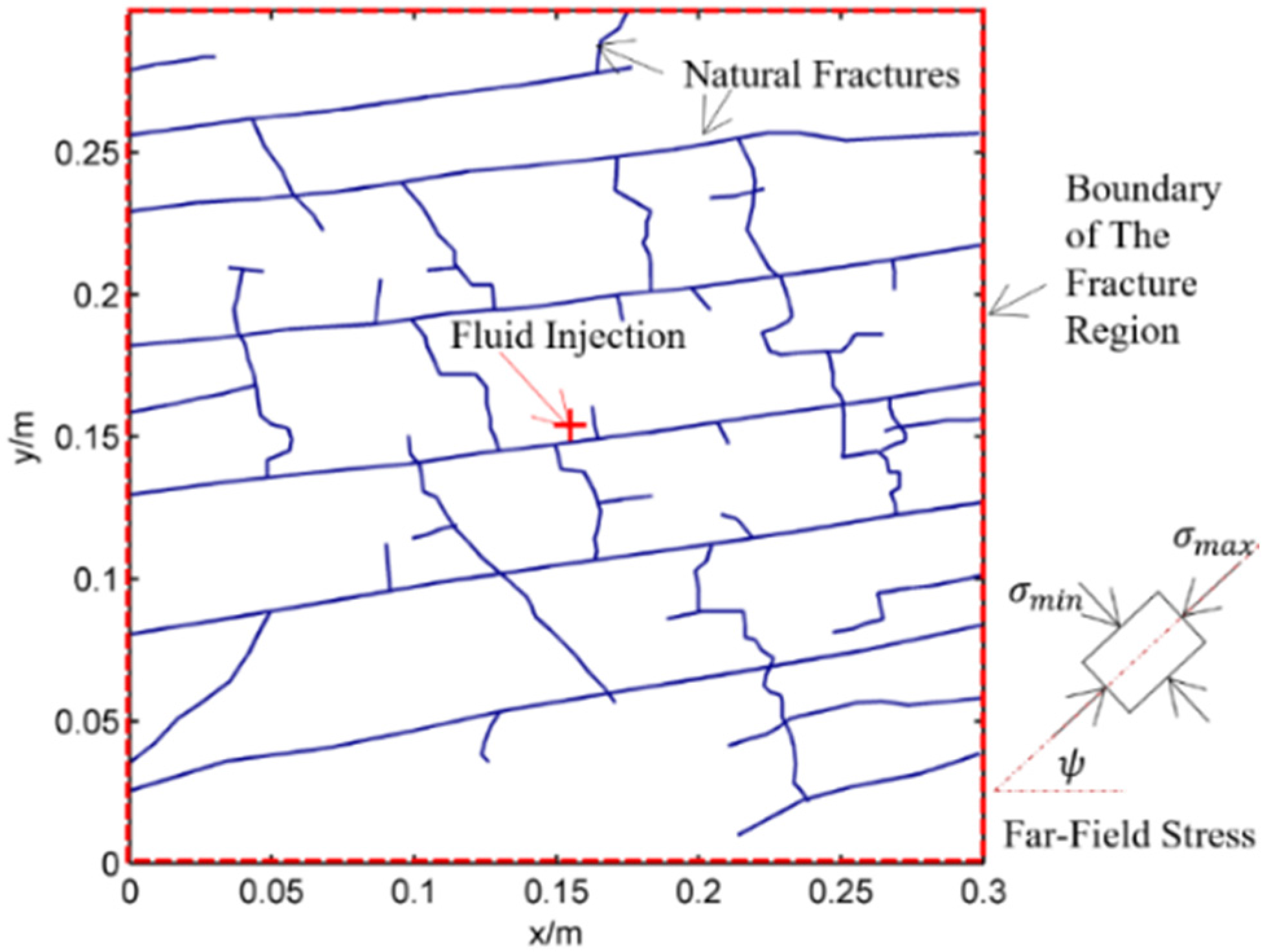
2.2. Natural Fracture Network

- (1)
- The complete identifying of NF is impossible. By contrast, many small fractures are not clearly shown.
- (2)
- There are two orthogonal sets of fractures. The length is longer and the connectivity is better for the horizontal set.
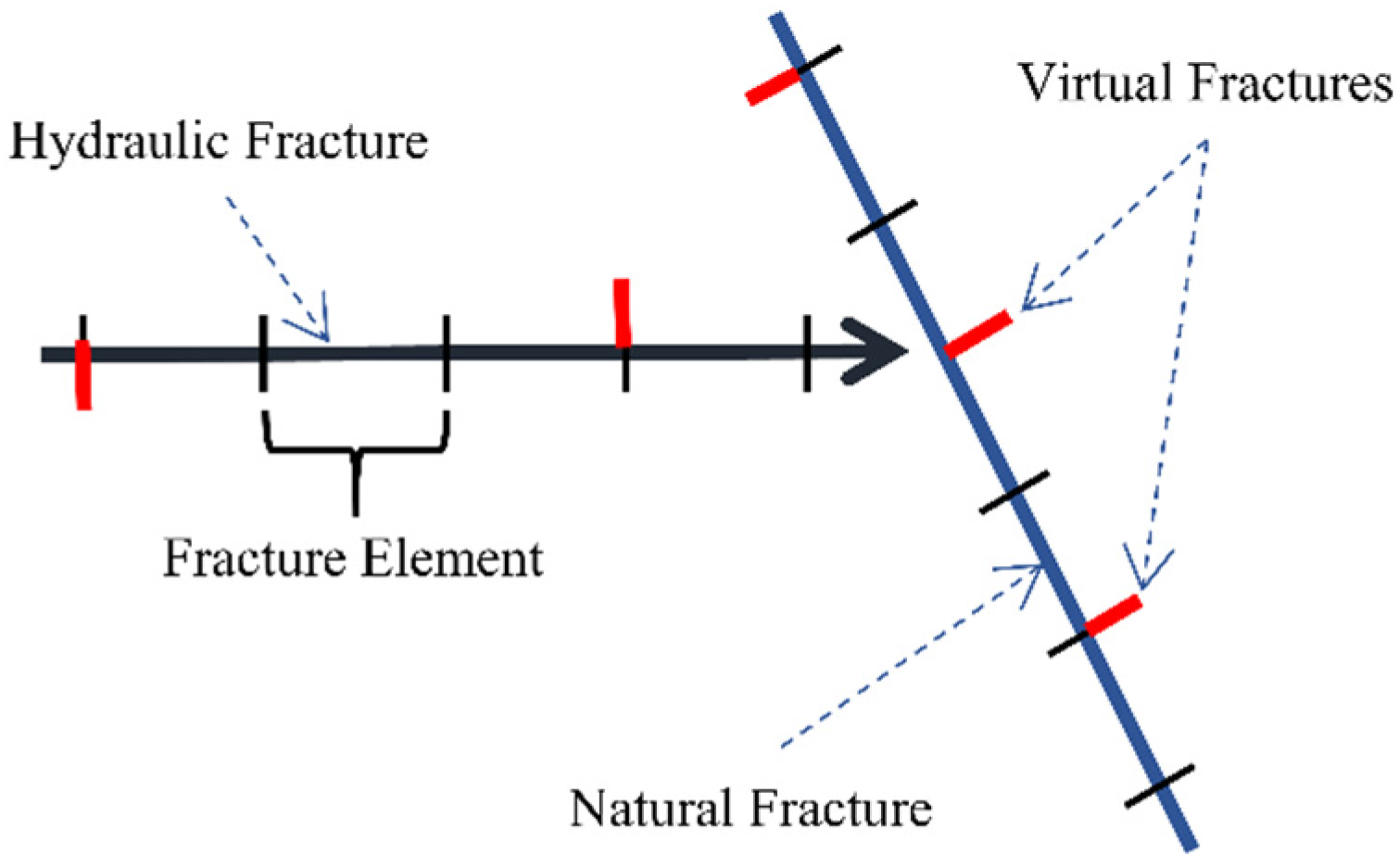
2.3. Virtual Fracture System

2.4. The Work Flow

3. Model Validation
3.1. Against Theoretical Solution

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Fracture length | 1 m | Layer thickness | Infinite |
| 1 | Far-field stress | ||
| Poisson’s ratio | 0.1 |

| Grid N | (a – x)/L | Numerical (m) | Analytical (m) | Numerical/Analytical |
|---|---|---|---|---|
| 10 | 0.050 | 0.498 | 0.392 | 1.270 |
| 30 | 0.017 | 0.290 | 0.230 | 1.259 |
| 50 | 0.010 | 0.225 | 0.180 | 1.250 |
| 70 | 0.0071 | 0.190 | 0.152 | 1.250 |
| 90 | 0.0056 | 0.168 | 0.134 | 1.253 |
| 100 | 0.0050 | 0.159 | 0.127 | 1.252 |
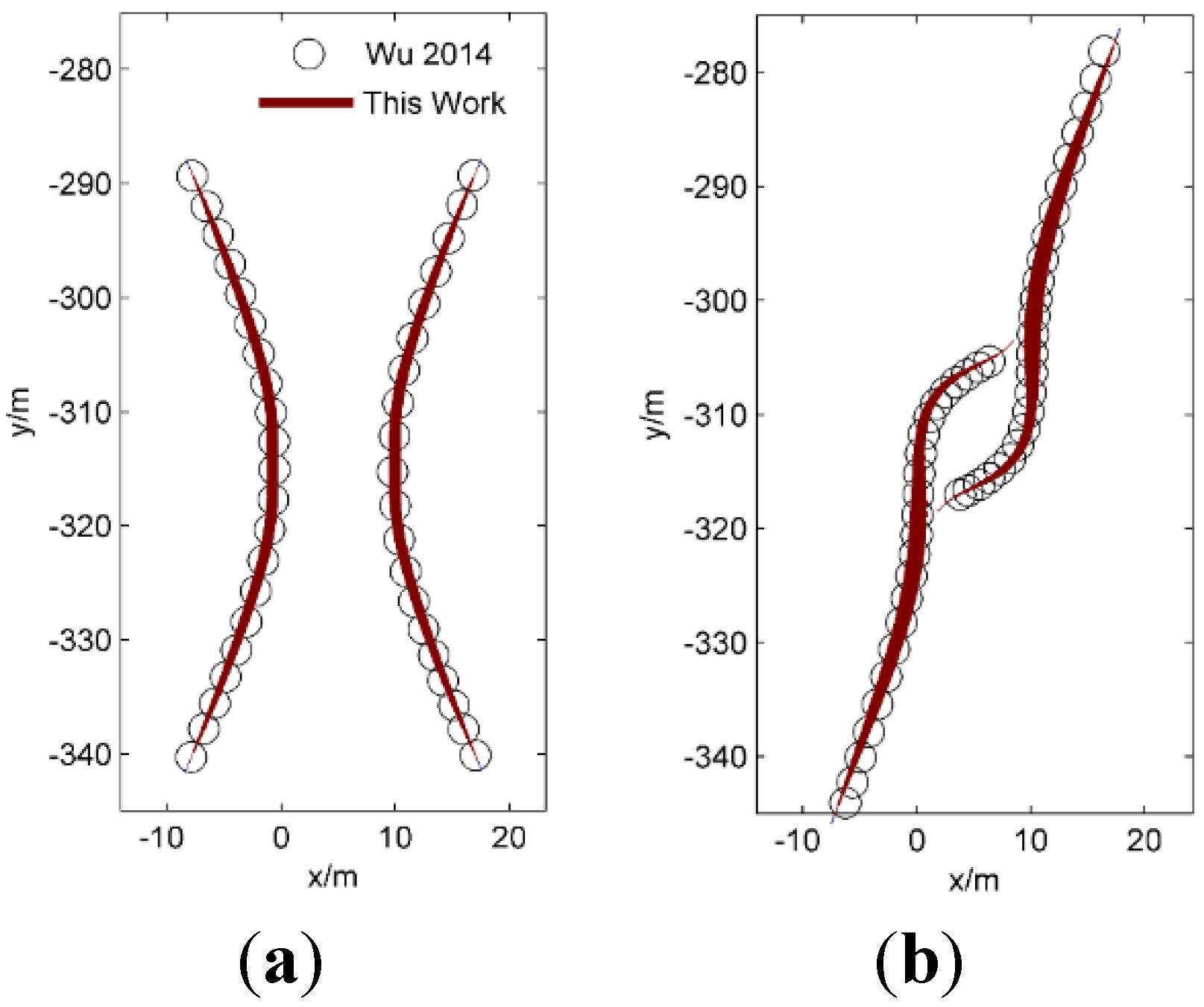
3.2. Against Numerical Modelling

| Parameter | Value | Parameter | Value |
|---|---|---|---|
| q | 8.8 × 10−4 m3/s/m | h | 120 m |
| μ | 1.0 cP | KIC | 1.0 × 106 Pa.m0.5 |
| E | 3.0 × 1010 Pa | Far-field stress | |
| Poisson’s ratio | 0.35 |
4. Results and Discussion
4.1. Numerical Setting
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| q | 0.001 m3/s/m | NF aperture | 10μm |
| μ | 1 cP | Fracture spacing | 0.027 m |
| E | 1.8 × 1010 Pa | ψ | |
| Poisson’s ratio | 0.18 | 9 MPa | |
| h | 0.3 m | 100 MPa | |
| KIC | 0.5 × 106 Pa.m0.5 | precision | 1 Pa |
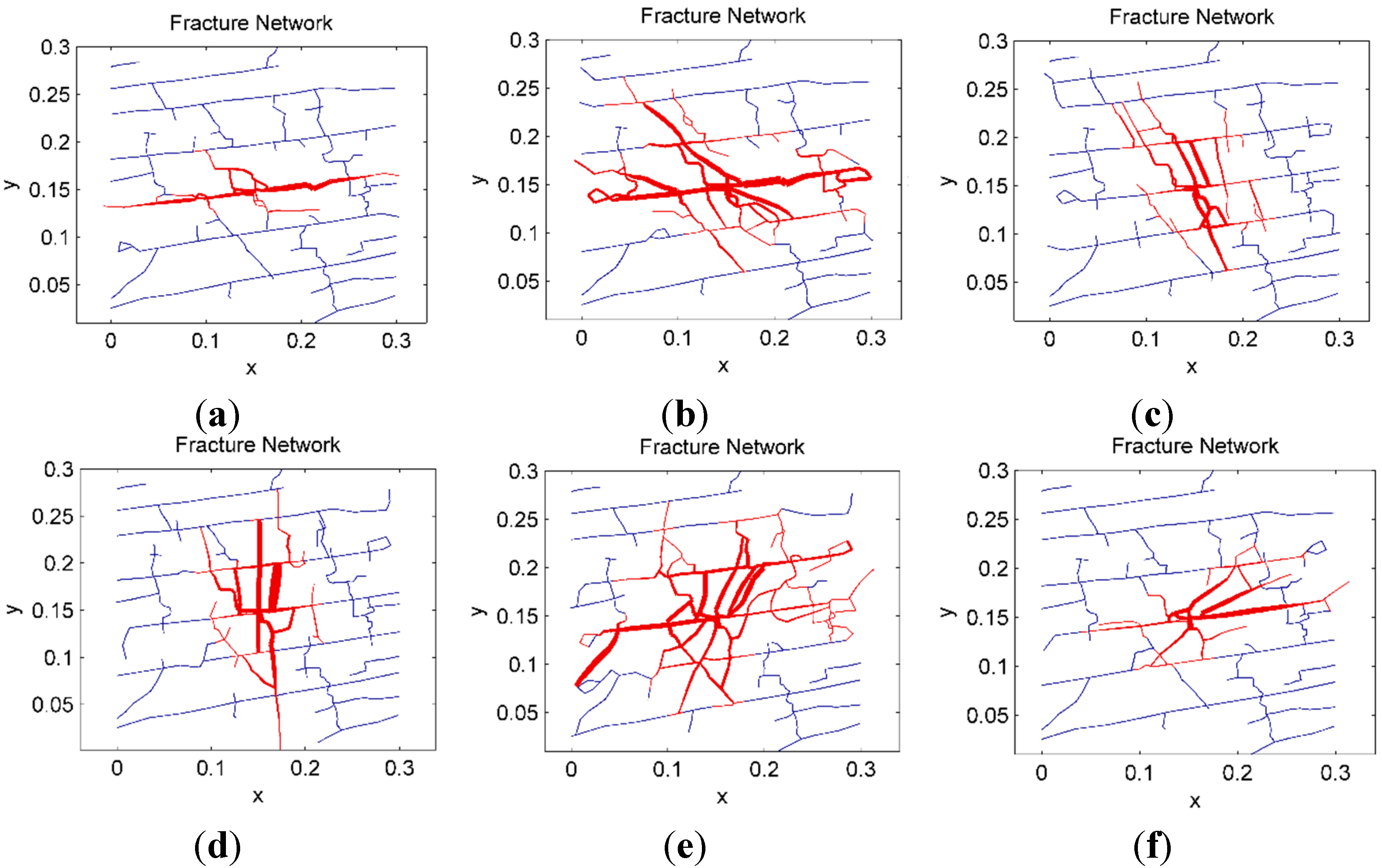
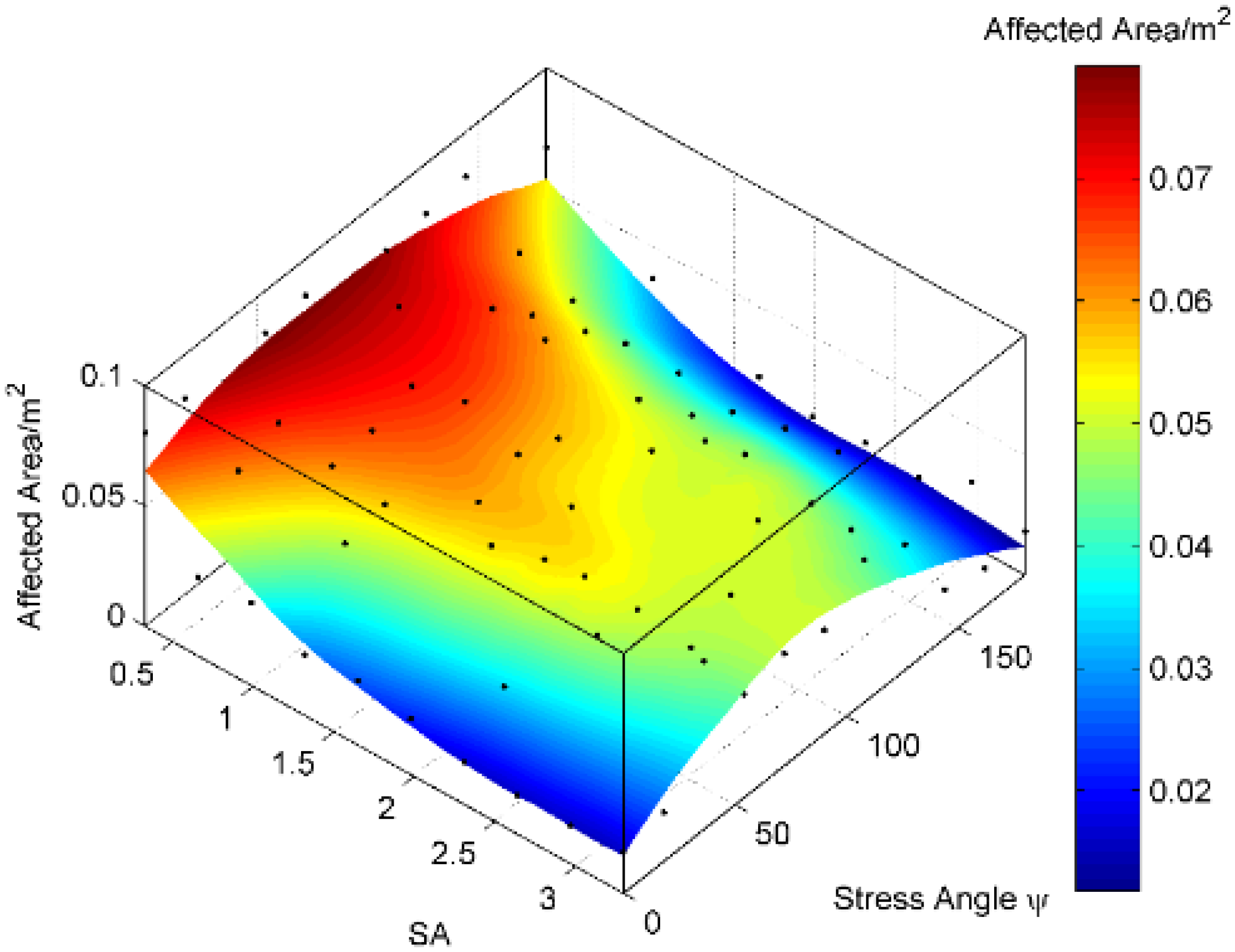
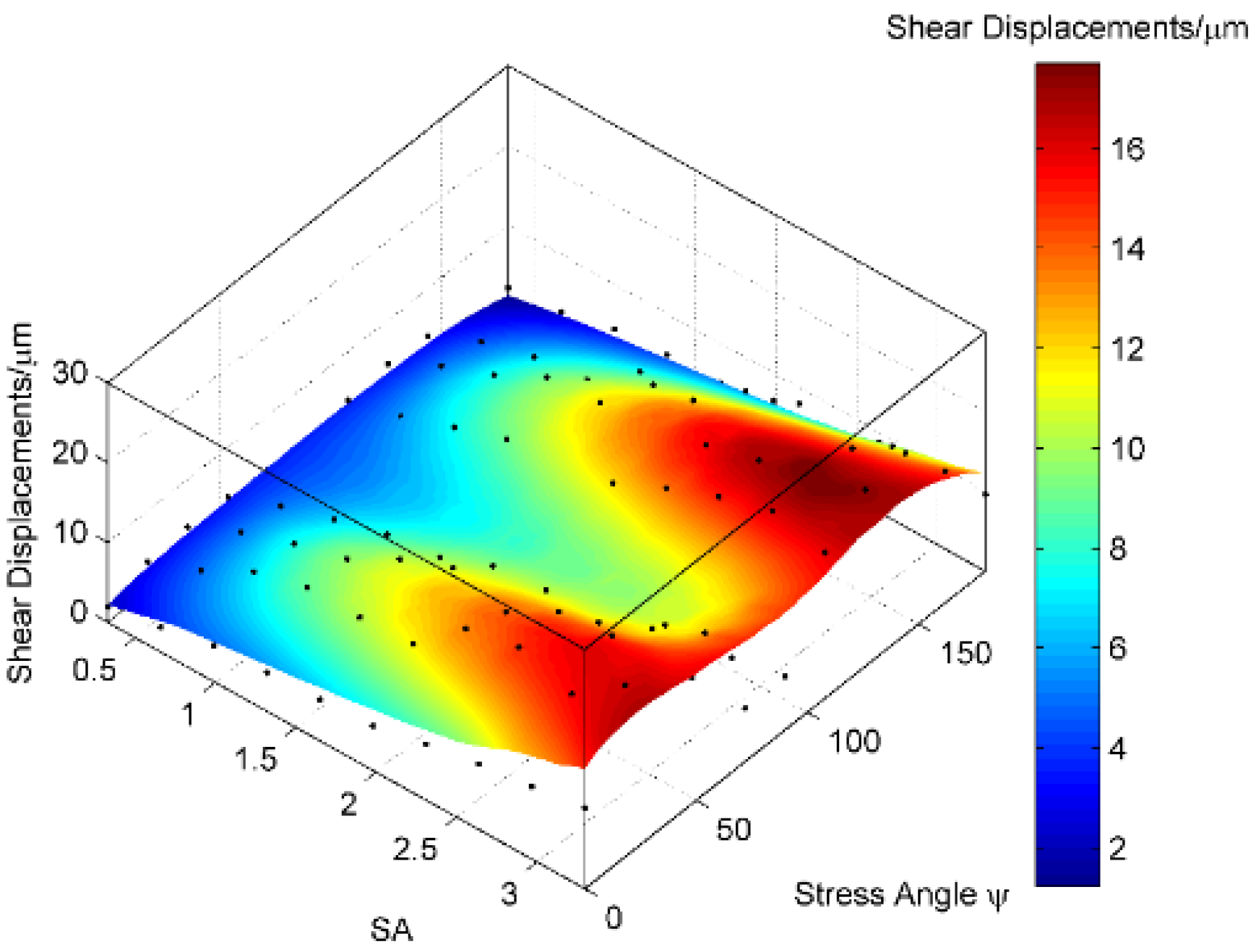
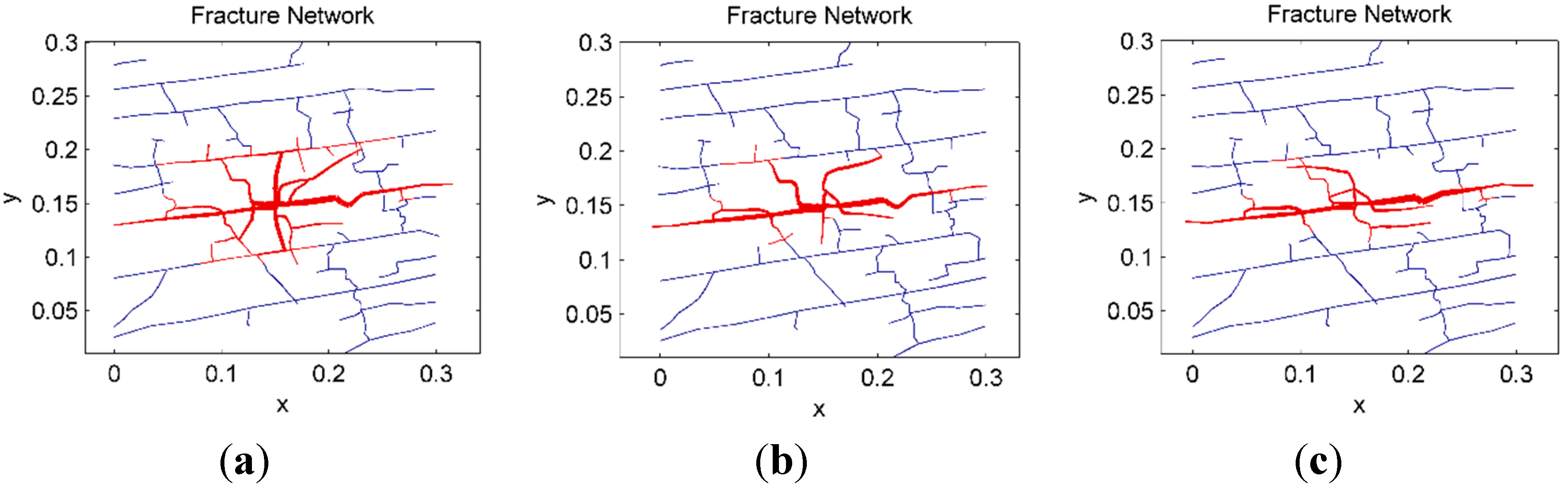
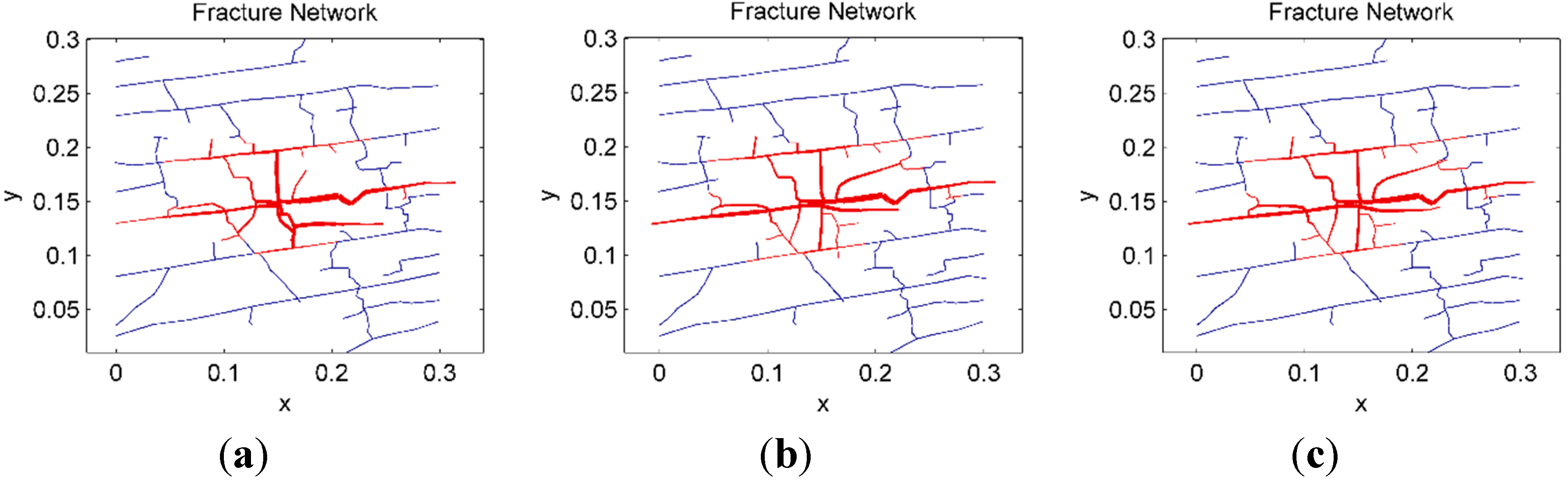
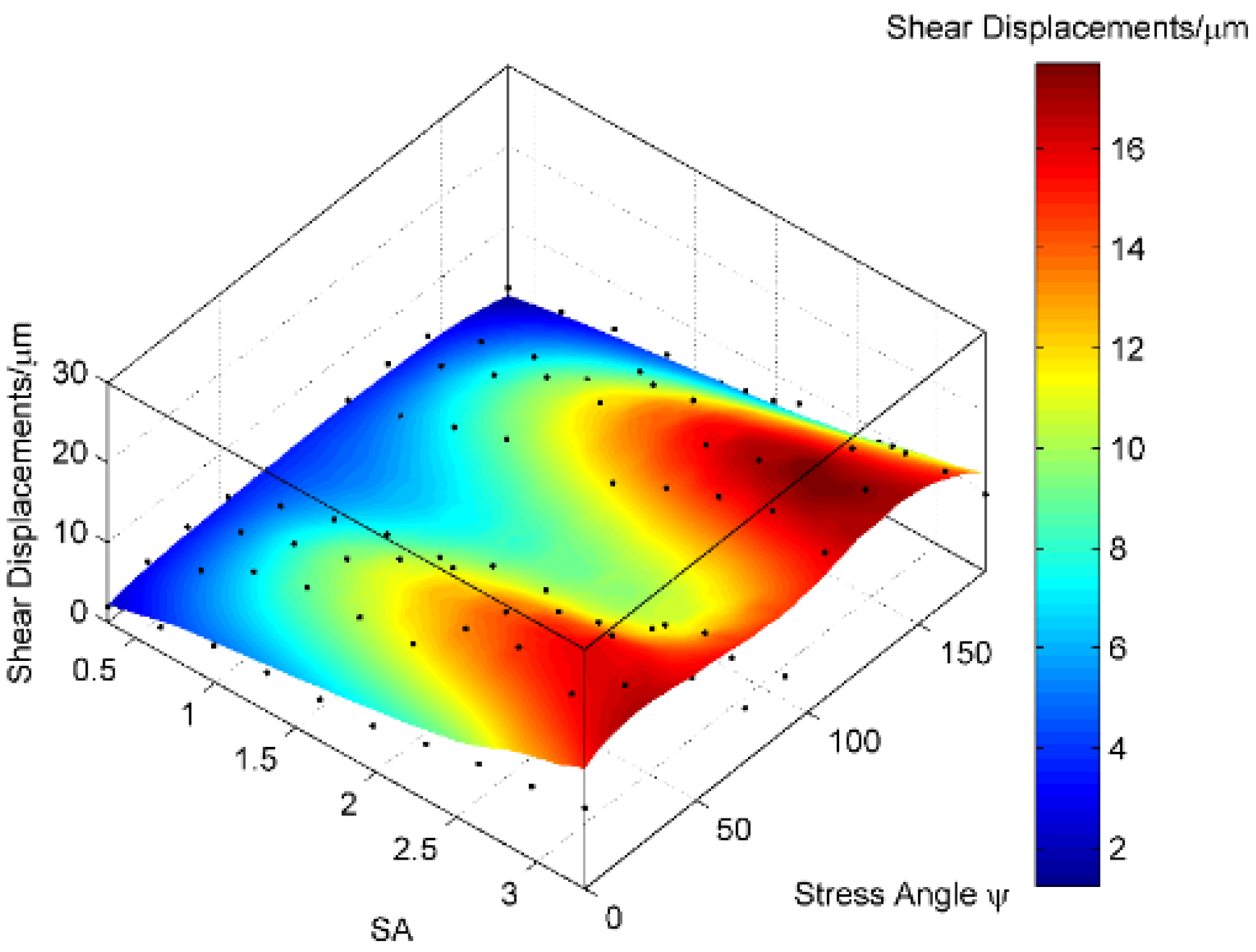
4.2. Quantification of Stress Anisotropy and Fluid Viscosity

| Parameter | (a) | (b) | (c) |
|---|---|---|---|
| 1.0 × 106 | 3.0 × 106 | 5.0 × 106 | |
| 1 | 81 | 625 | |
| 0.5 × 106 | 1.5 × 106 | 2.5 × 106 | |
| Fracture spacing/m | 0.027 | 0.027 | 0.027 |
| M | 93.3 | 93.3 | 93.3 |
| SAxy | 0.33 | 0.33 | 0.33 |
4.3. Effect of Stress Anisotropy



4.4. Effect of Fluid Viscosity

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Frantz, J.; Jochen, V. Shale gas white paper. Available online: http://www.docin.com/p-364125972.html?qq-pf-to=pcqq.c2c (accessed on 22 October 2015).
- Harper, J. The marcellus shale—An old “new” gas reservoir in Pennsylvania. Pa. Geol. 2008, 28, 2–13. [Google Scholar]
- Weng, X. Modeling of complex hydraulic fractures in naturally fractured formation. J. Unconv. Oil Gas Resour. 2015, 9, 114–135. [Google Scholar]
- Meng, Q.M.; Zhang, S.C.; Guo, X.M.; Chen, X.H.; Zhang, Y. A primary investigation on propagation mechanism for hydraulic fracture in glutenite formation. J. Oil Gas Tech. 2010, 32, 119–123. [Google Scholar]
- Bunger, A.P.; Gordeliy, E.; Detournay, E. Comparison between laboratory experiments and coupled simulations of saucer-shaped hydraulic fractures in homogeneous brittle-elastic solids. J. Mech. Phys. Solids 2013, 61, 1636–1654. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, F.; Callahan, P.; Ayoub, J.A. Fluid injection experiments in 2d porous media. SPE J. 2012, 17, 903–911. [Google Scholar] [CrossRef]
- McClure, M.; Horne, R. Characterizing hydraulic fracturing with a tendency-for-shear-stimulation test. SPE Reserv. Eval. Eng. 2014, 17, 233–243. [Google Scholar] [CrossRef]
- Wu, K.; Olson, J.E. Simultaneous multifracture treatments: Fully coupled fluid flow and fracture mechanics for horizontal wells. SPE J. 2014, 20, 337–346. [Google Scholar] [CrossRef]
- Perkins, T.K.; Kern, L.R. Widths of hydraulic fractures. J. Pet. Technol. 1961, 13, 937–949. [Google Scholar] [CrossRef]
- Nordgren, R.P. Propagation of a vertical hydraulic fracture. Soc. Pet. Eng. J. 1972, 12, 306–314. [Google Scholar] [CrossRef]
- Geertsma, J.; De Klerk, F. Rapid method of predicting width and extent of hydraulically induced fractures. J. Pet. Technol. 1969, 21, 1571–1581. [Google Scholar] [CrossRef]
- Advani, S.H.; Lee, T.S.; Lee, J.K. Three-dimensional modeling of hydraulic fractures in layered media: Part I—Finite element formulations. J. Energy Resour. Technol. 1990, 112. [Google Scholar] [CrossRef]
- Siebrits, E.; Peirce, A.P. An efficient multi-layer planar 3d fracture growth algorithm using a fixed mesh approach. Int. J. Numer. Method Eng. 2002, 53, 691–717. [Google Scholar] [CrossRef]
- Nagel, N.B.; Sanchez-Nagel, M. Stress shadowing and microseismic events: A numerical evaluation. In Proceedings of the SPE Annual Technical Conference and Exhibition, Denver, CO, USA, 30 October–2 November 2011.
- Rahman, M.M.; Rahman, S.S. Studies of hydraulic fracture-propagation behavior in presence of natural fractures: Fully coupled fractured-reservoir modeling in poroelastic environments. Int. J. Geomech. 2013, 13, 809–826. [Google Scholar] [CrossRef]
- Liu, F.S.; Borja, R.I. Extended finite element framework for fault rupture dynamics including bulk plasticity. Int. J. Numer. Anal. Methods Geomech. 2013, 37, 3087–3111. [Google Scholar] [CrossRef]
- Mohammadnejad, T.; Khoei, A.R. An extended finite element method for fluid flow in partially saturated porous media with weak discontinuities; the convergence analysis of local enrichment strategies. Comput. Mech. 2013, 51, 327–345. [Google Scholar] [CrossRef]
- Gordeliy, E.; Peirce, A. Coupling schemes for modeling hydraulic fracture propagation using the XFEM. Compu. Methods Appl. Mech. Eng. 2013, 253, 305–322. [Google Scholar] [CrossRef]
- Fu, P.C.; Johnson, S.M.; Carrigan, C.R. An explicitly coupled hydro-geomechanical model for simulating hydraulic fracturing in arbitrary discrete fracture networks. Int. J. Numer. Anal. Methods Geomech. 2013, 37, 2278–2300. [Google Scholar] [CrossRef]
- Riahi, A.; Damjanac, B. Numerical study of interaction between hydraulic fracture and discrete fracture network. In Proceedings of the ISRM International Conference for Effective and Sustainable Hydraulic Fracturing, Brisbane, Australia, 20–22 May 2013.
- Zhuang, X.; Augarde, C.E.; Mathisen, K. Fracture modeling using meshless methods and level sets in 3d: Framework and modeling. Int. J. Numer. Methods Eng. 2012, 92, 969–998. [Google Scholar] [CrossRef]
- Zhuang, X.; Huang, R.; Liang, C.; Rabczuk, T. A coupled thermo-hydro-mechanical model of jointed hard rock for compressed air energy storage. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Rabczuk, T.; Belytschko, T. Cracking particles: A simplified meshfree method for arbitrary evolving cracks. Int. J. Numer. Methods Eng. 2004, 61, 2316–2343. [Google Scholar] [CrossRef]
- Li, H.; Liu, C.L.; Mizuta, Y.; Kayupov, M.A. Crack edge element of three-dimensional displacement discontinuity method with boundary division into triangular leaf elements. Int. J. Numer. Methods Biomed. 2001, 17, 365–378. [Google Scholar] [CrossRef]
- Yan, X.Q.; Liu, B.L. Fatigue growth modeling of cracks emanating from a circular hole in infinite plate. Meccanica 2012, 47, 221–233. [Google Scholar] [CrossRef]
- Birgisson, B.; Wang, J.L.; Roque, R.; Sangpetngam, B. Numerical implementation of a strain energy-based fracture model for HMA materials. Road Mater. Pavement Des. 2007, 8, 7–45. [Google Scholar] [CrossRef]
- Dong, C.Y.; Lo, S.H.; Cheung, Y.K. Numerical analysis of the inclusion-crack interactions using an integral equation. Comput. Mech. 2003, 30, 119–130. [Google Scholar] [CrossRef]
- Zhang, X.; Jeffrey, R. Development of fracture networks through hydraulic fracture growth in naturally fractured reservoirs. In Proceedings of the ISRM International Conference for Effective and Sustainable Hydraulic Fracturing, Brisbane, Australia, 20–22 May 2013.
- McClure, M.W.; Horne, R.N. Conditions required for shear stimulation in EGS. In Proceedings of the European Geothermal Conference, Pisa, Italy, 3–7 June 2013.
- Zhang, Z.; Li, X.; He, J.; Wu, Y.; Zhang, B. Numerical analysis on the stability of hydraulic fracture propagation. Energies 2015, 8, 9860–9877. [Google Scholar] [CrossRef]
- Olson, J.E. Multi-fracture propagation modeling: Applications to hydraulic fracturing in shales and tight gas sands. In Proceedings of the U.S. Rock Mechanics Symposium (USRMS), San Francisco, CA, USA, 29 June–2 July 2008.
- Kresse, O.; Weng, X.W.; Gu, H.R.; Wu, R.T. Numerical modeling of hydraulic fractures interaction in complex naturally fractured formations. Rock Mech. Rock Eng. 2013, 46, 555–568. [Google Scholar] [CrossRef]
- McClure, M.W.; Horne, R.N. Discrete Fracture Network Modeling of Hydraulic Stimulation: Coupling Flow and Geomechanics; SpringerBriefs in Earth Sciences, Springer International Publishing: London, UK, 2013. [Google Scholar]
- Zhang, X.; Jeffrey, R.G. Fluid-driven multiple fracture growth from a permeable bedding plane intersected by an ascending hydraulic fracture. J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef]
- Crouch, S.L.; Starfield, A.M. Boundary Element Methods in Solid Mechanics; George Allen & Unwin: London, UK, 1983. [Google Scholar]
- Weng, X.; Kresse, O.; Cohen, C.; Wu, R.; Gu, H. Modeling of hydraulic-fracture-network propagation in a naturally fractured formation. SPE Product. Oper. 2011, 26, 368–380. [Google Scholar] [CrossRef]
- Wu, K.; Olson, J.E. Investigation of the impact of fracture spacing and fluid properties for interfering simultaneously or sequentially generated hydraulic fractures. SPE Product. Oper. 2013, 28, 427–436. [Google Scholar] [CrossRef]
- Olson, J.E. Predicting fracture swarms—The influence of subcritical crackgrowth and the crack-tip process zone on joint spacing in rock. In The Initiation, Propagation, and Arrest of Joints and Other Fractures; Geological Society of London Special Publication: London, UK, 2004; Volume 231, pp. 73–87. [Google Scholar]
- De, X.; Qin, Q.; Changan, L. Numerical Method and Engineering Application of Fracture Mechanics; Science Press: Beijing, China, 2009. (In Chinese) [Google Scholar]
- Kresse, O.; Cohen, C.; Weng, X.; Wu, R.; Gu, H. Numerical modeling of hydraulic fracturing in naturally fractured formations. In Proceedings of the 45th US Rock Mechanics/Geomechanics Symposium, San Francisco, CA, USA, 26–29 June 2011.
- Nagel, N.B.; Gil, I.; Sanchez-nagel, M.; Damjanac, B. Simulating hydraulic fracturing in real fractured rocks—overcoming the limits of pseudo3d models. In Proceedings of the SPE Hydraulic Fracturing Technology Conference, The Woodlands, TX, USA, 24–26 January 2011.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Li, X.; Yuan, W.; He, J.; Li, G.; Wu, Y. Numerical Analysis on the Optimization of Hydraulic Fracture Networks. Energies 2015, 8, 12061-12079. https://doi.org/10.3390/en81012061
Zhang Z, Li X, Yuan W, He J, Li G, Wu Y. Numerical Analysis on the Optimization of Hydraulic Fracture Networks. Energies. 2015; 8(10):12061-12079. https://doi.org/10.3390/en81012061
Chicago/Turabian StyleZhang, Zhaobin, Xiao Li, Weina Yuan, Jianming He, Guanfang Li, and Yusong Wu. 2015. "Numerical Analysis on the Optimization of Hydraulic Fracture Networks" Energies 8, no. 10: 12061-12079. https://doi.org/10.3390/en81012061