
High Efficiency Variable-Frequency Full-Bridge Converter with a Load Adaptive Control Method Based on the Loss Model

Abstract
:1. Introduction
2. Loss Analysis Model of the PSFB Converter
- (1)
- Switching power losses (including gate-drive power losses). Voltage and current cross over during switching transitions, which results in switching power losses. These losses are related to the switching frequency, the voltage across the switches, and current through the switches. The gate of the device being charged causes the gate-drive power loss. It is related to the gate charge value, the switching frequency, and the gate-drive voltage.
- (2)
- Conduction power losses. These losses are mainly caused by the parasitic resistance in the components, such as the on resistance of the transistor, the transformer and inductor winding resistance. They can be calculated from the equivalent resistance and the rms current value in different branches in the converter.
- (3)
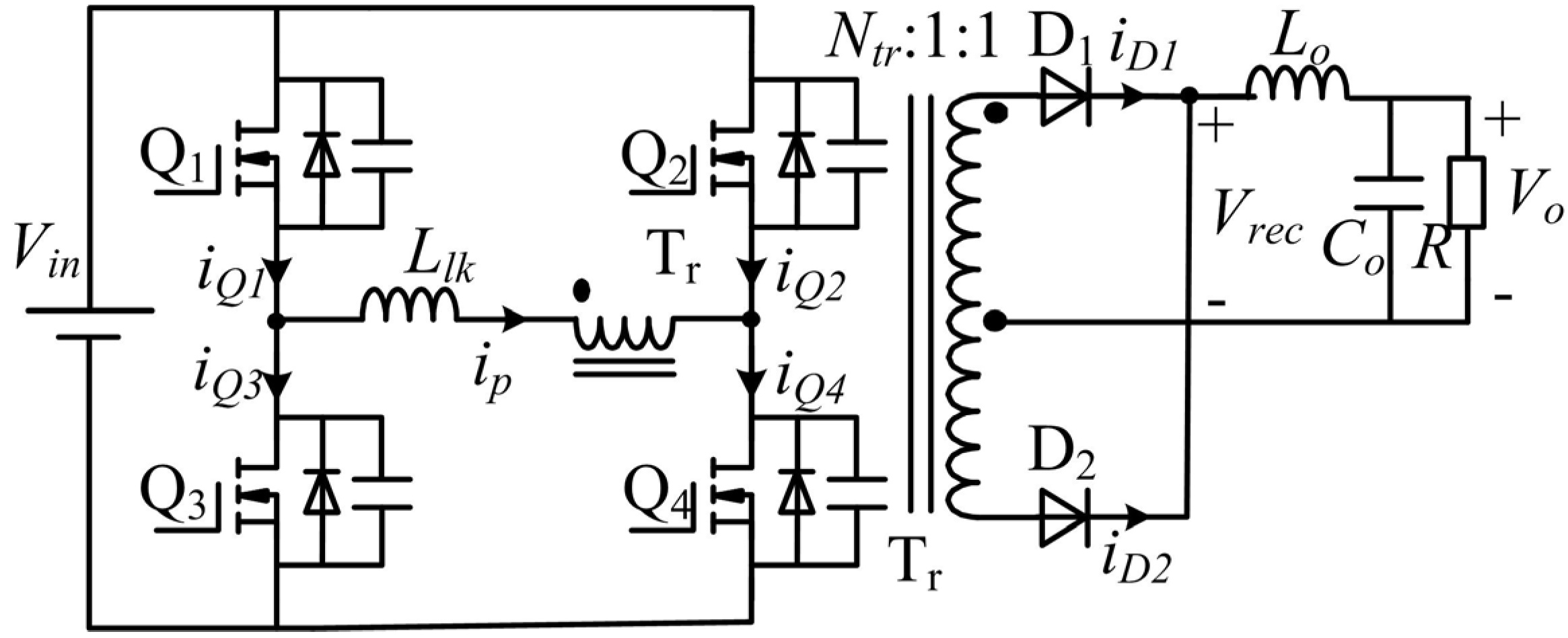
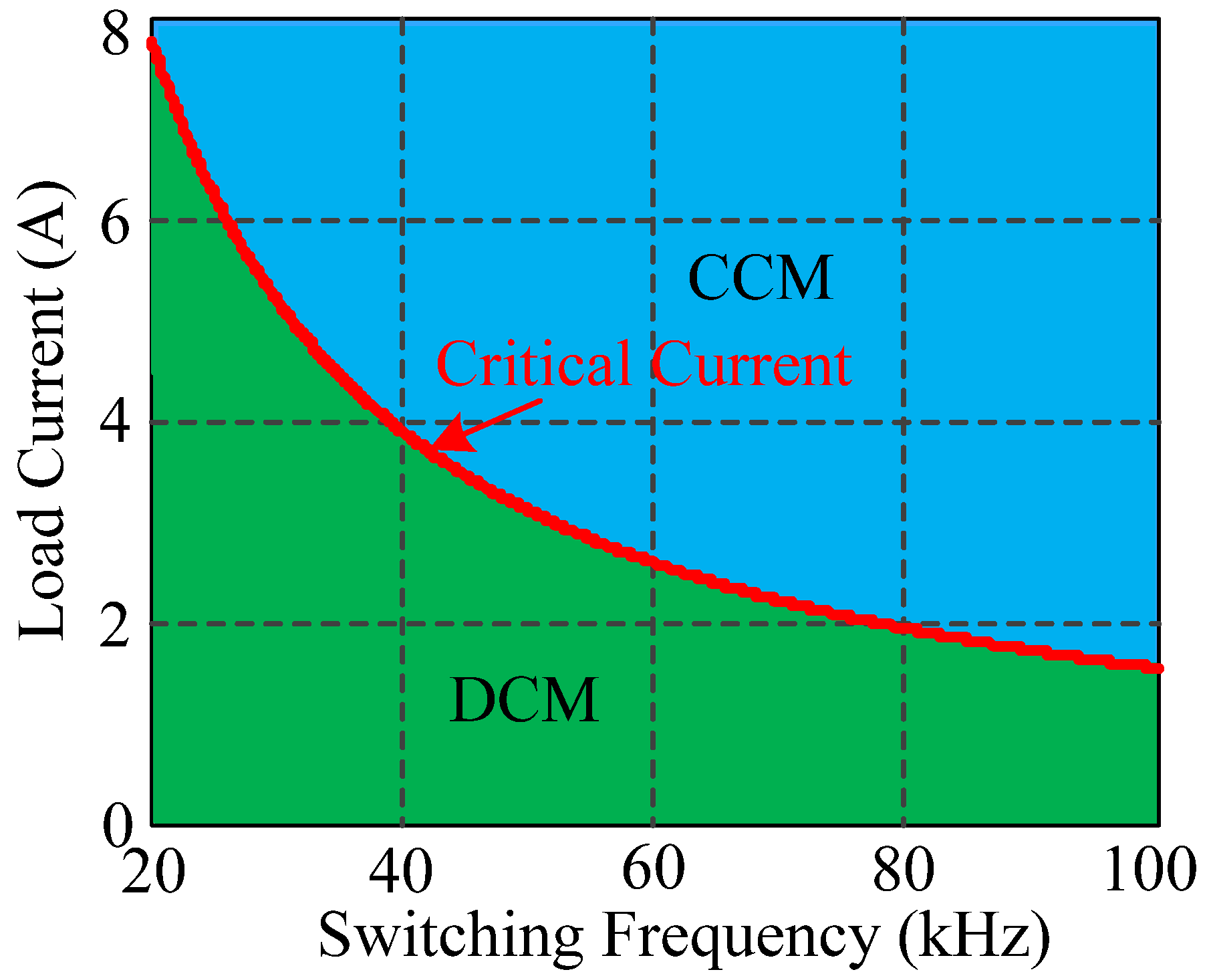
- Magnetic core power losses. The total magnetic core losses are the sum of hysteresis loss, residual loss and eddy current loss. The empirical methods based on measurement observations are one major group of core losses calculations. A widely used empirical-method is the Steinmetz equation [16]:where fs is the frequency in Hz; B is the peak flux density in Tesla; Ve is the effective volume of the core in m3; and k, α, β are constant which can be obtained from the core material datasheet. This equation has proven to be an effective method for the calculation of the magnetic core power losses. The circuit diagram of the PSFB converter is shown in Figure 1. The PSFB converter’s operation can be classified into DCM and CCM according to whether there is always current through the output filter inductor or not. The circuit analysis in CCM is quite different from that in DCM because of its different equivalent circuit.

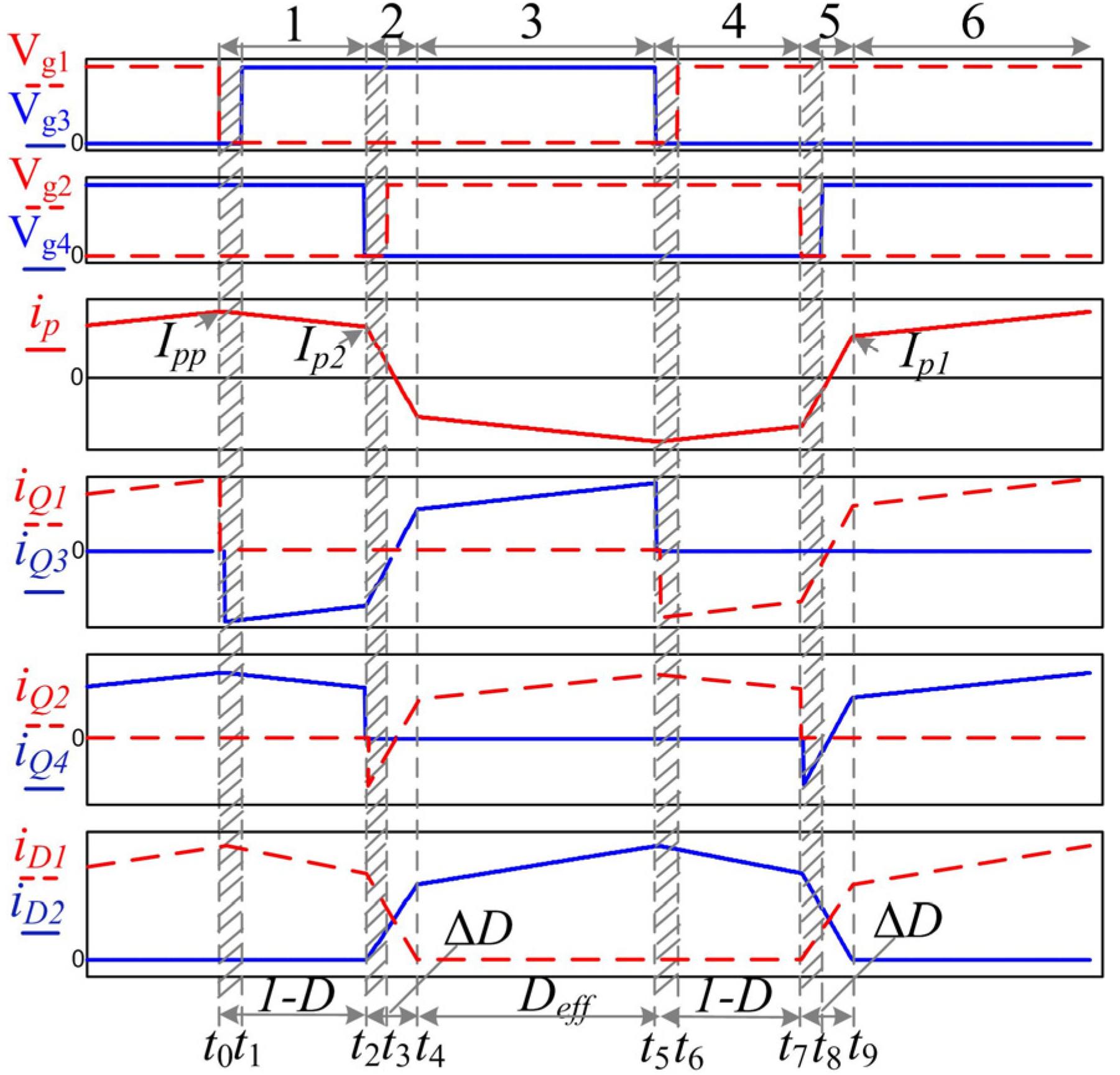
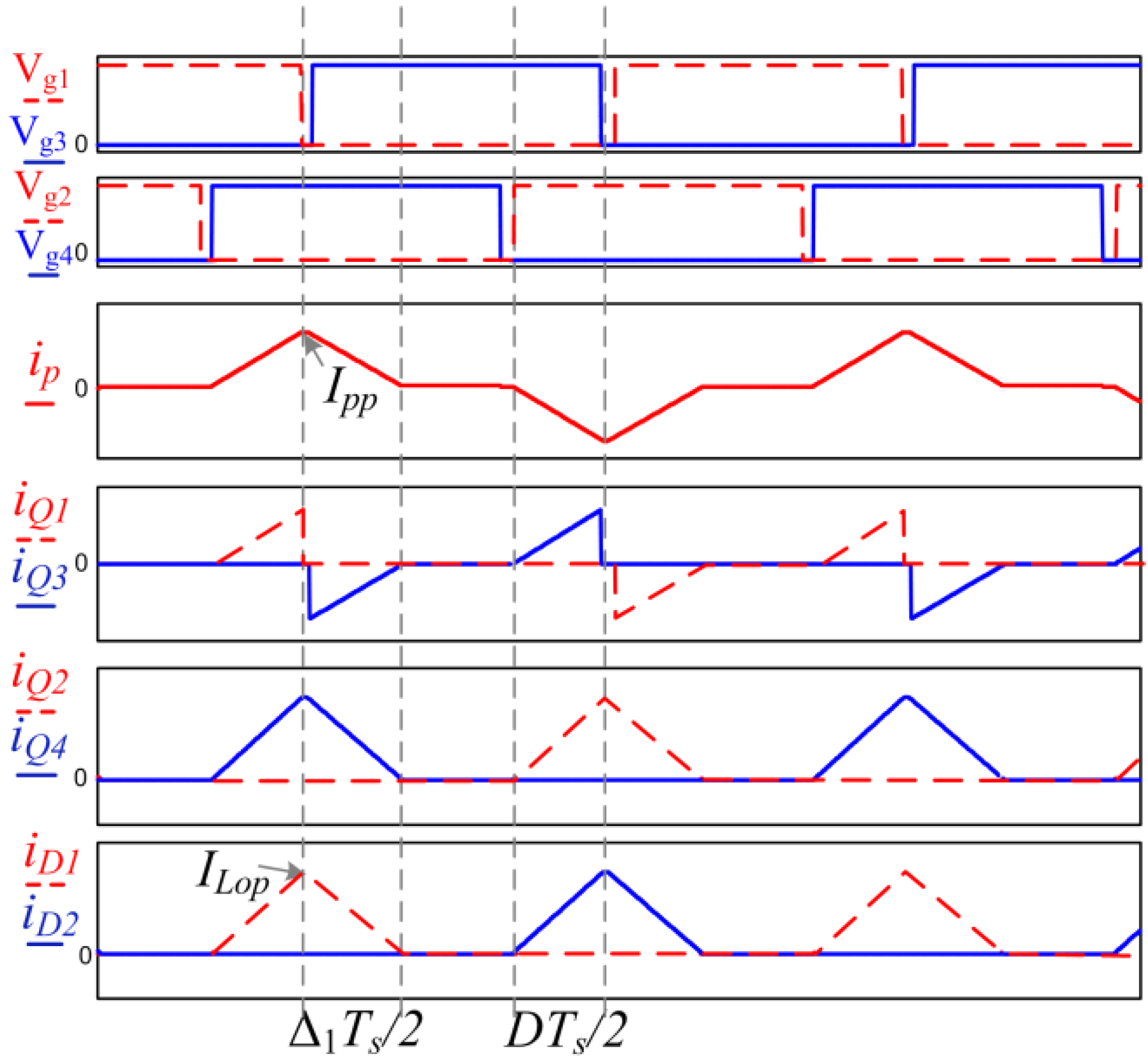
2.1. The Circuit Analysis in CCM Operation

2.2. The Loss Analysis in CCM Operation
2.2.1. Total Conduction Losses

2.2.2. Total Switching Losses

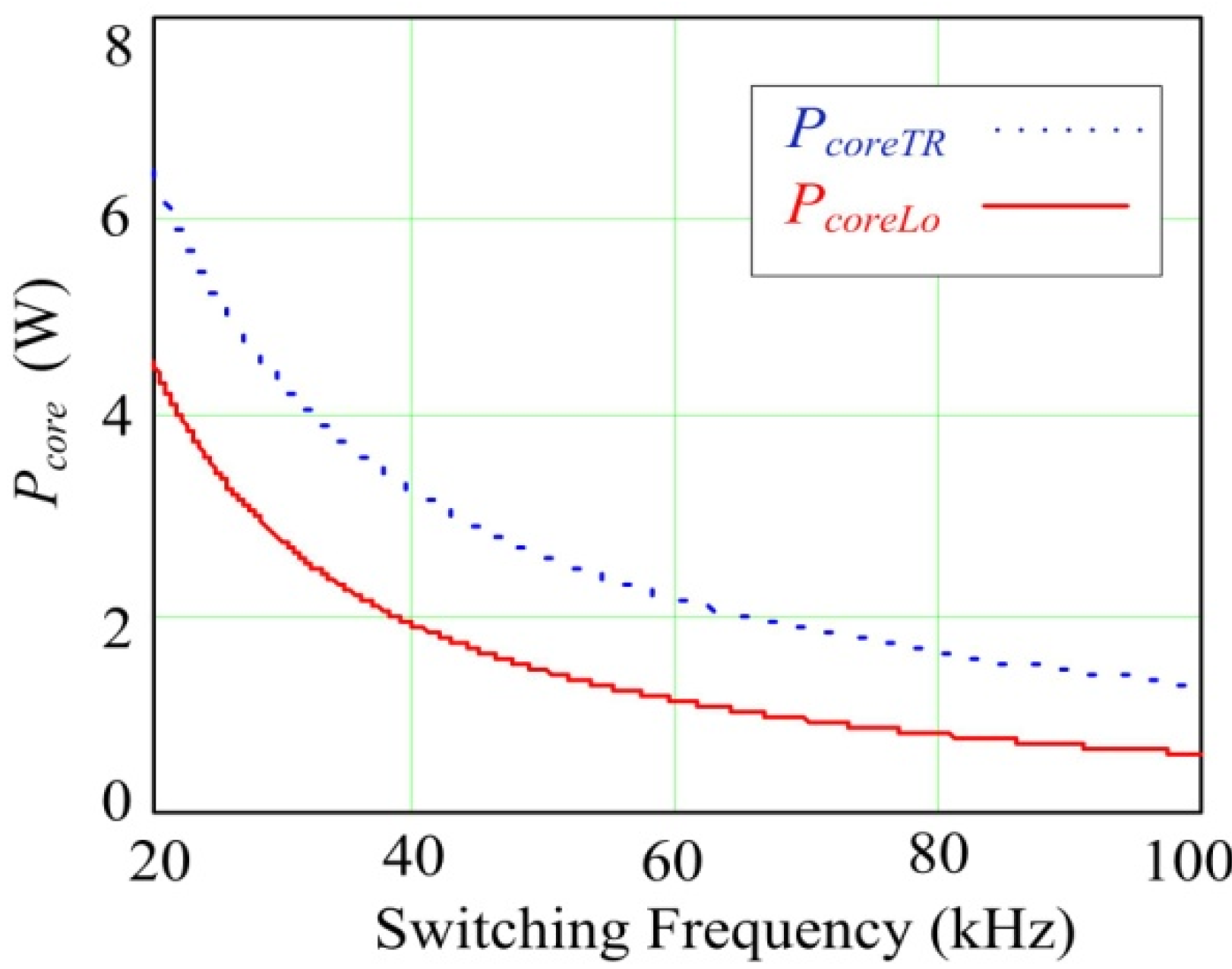
2.2.3. Magnetic Core Losses


2.3. The Loss Analysis in DCM Operation


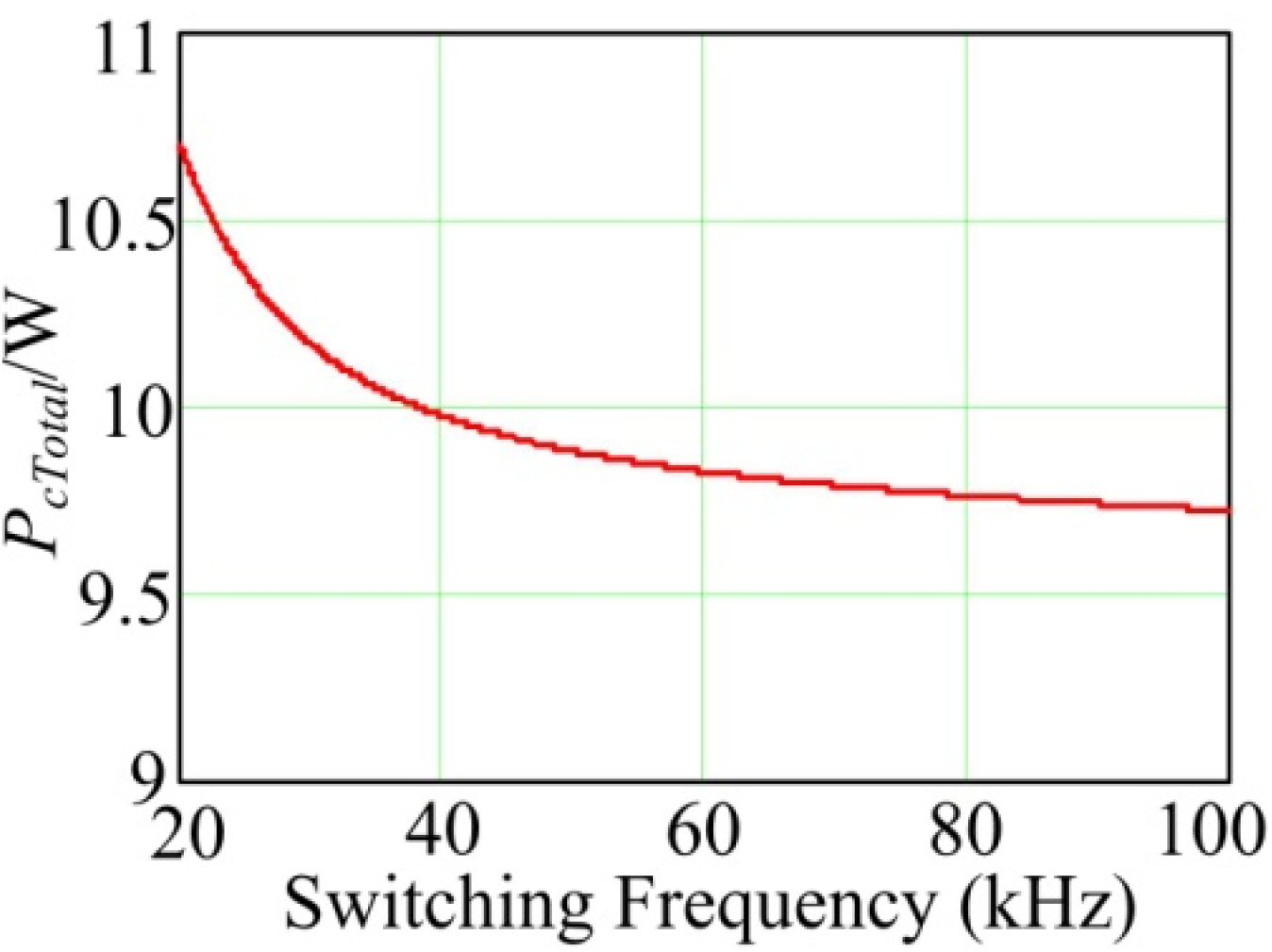
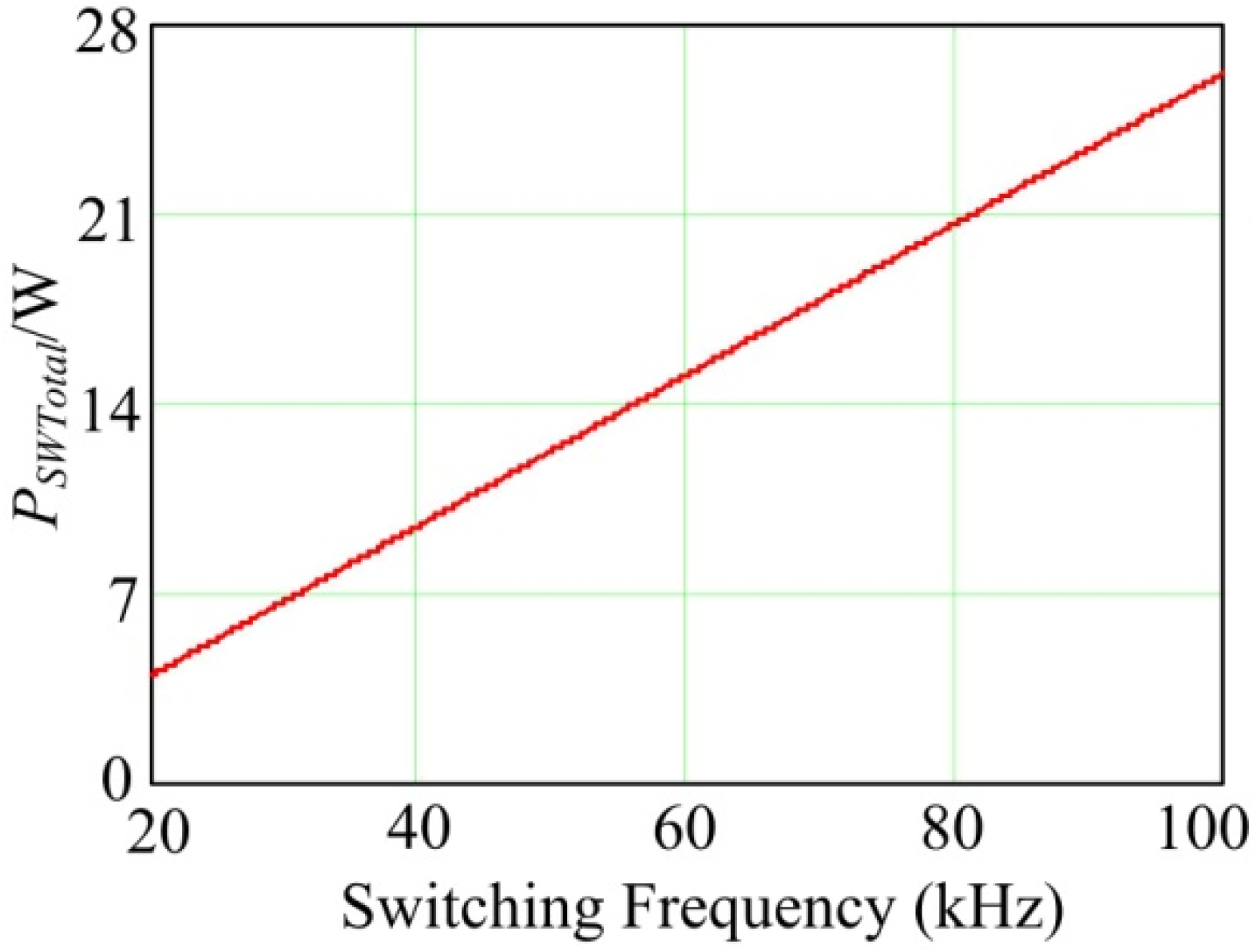
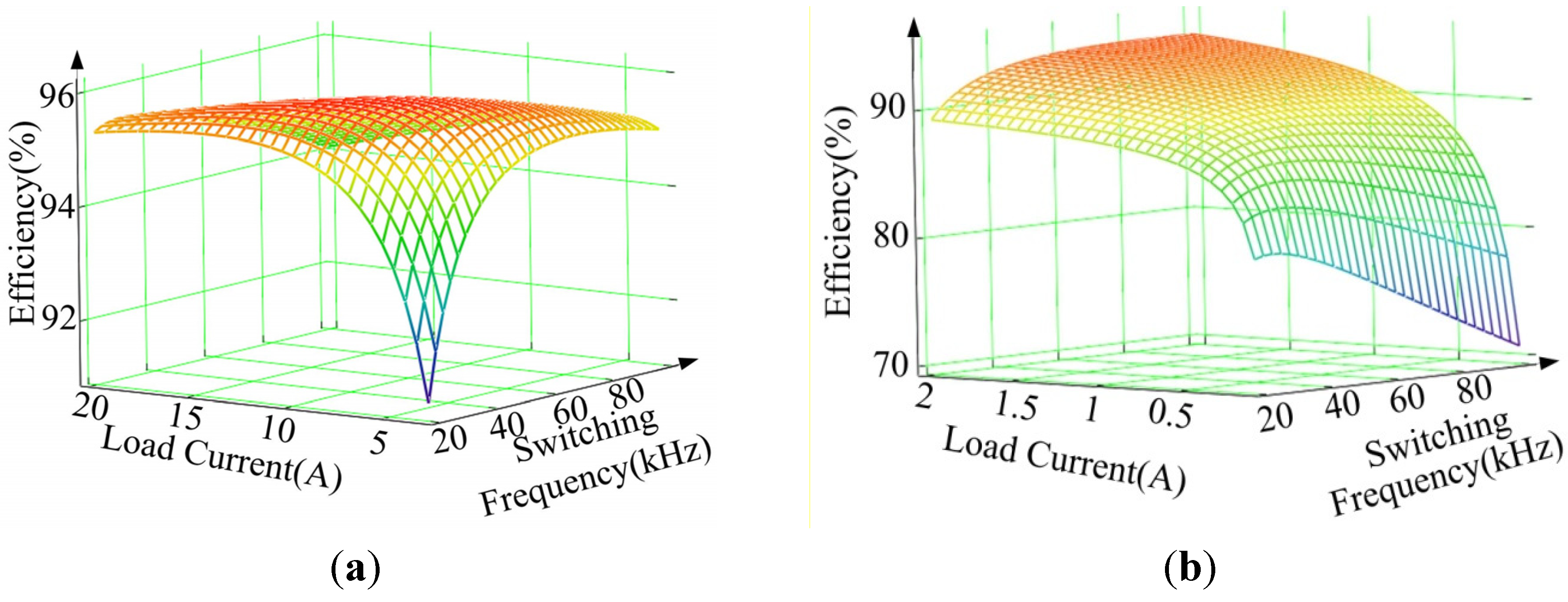
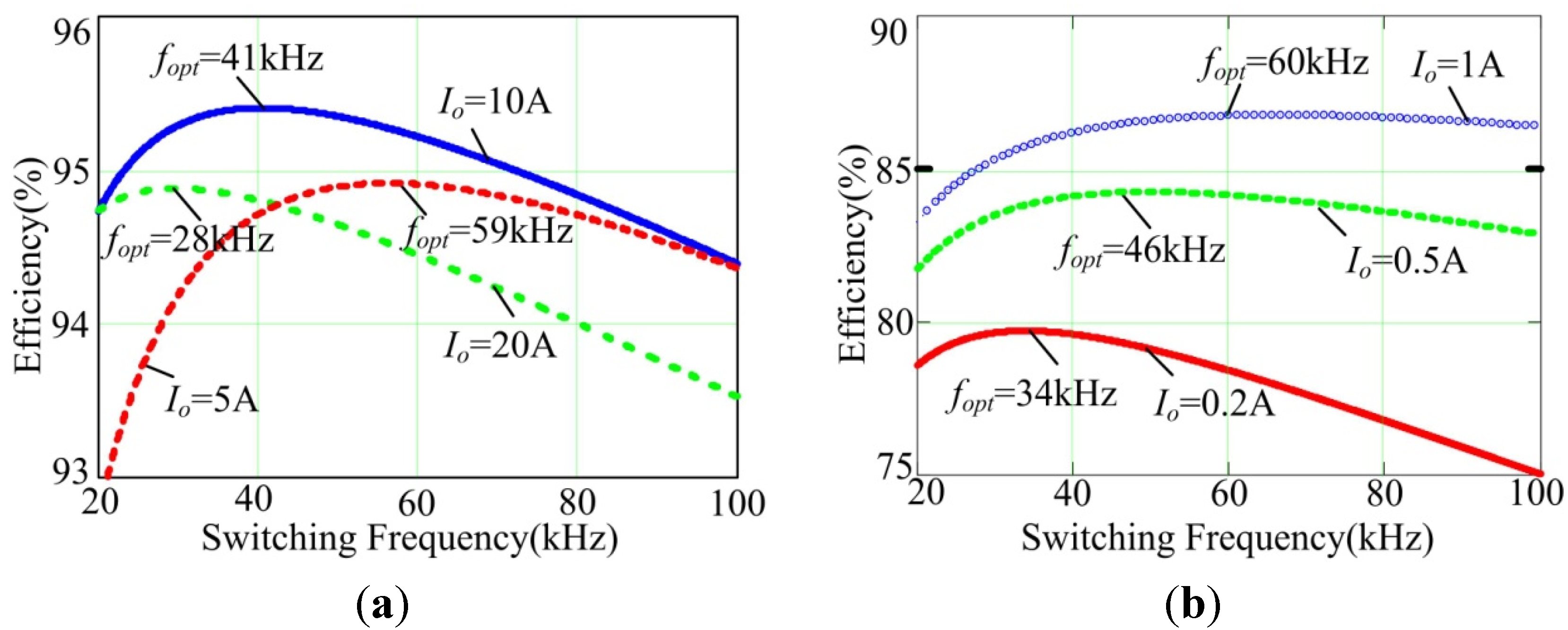
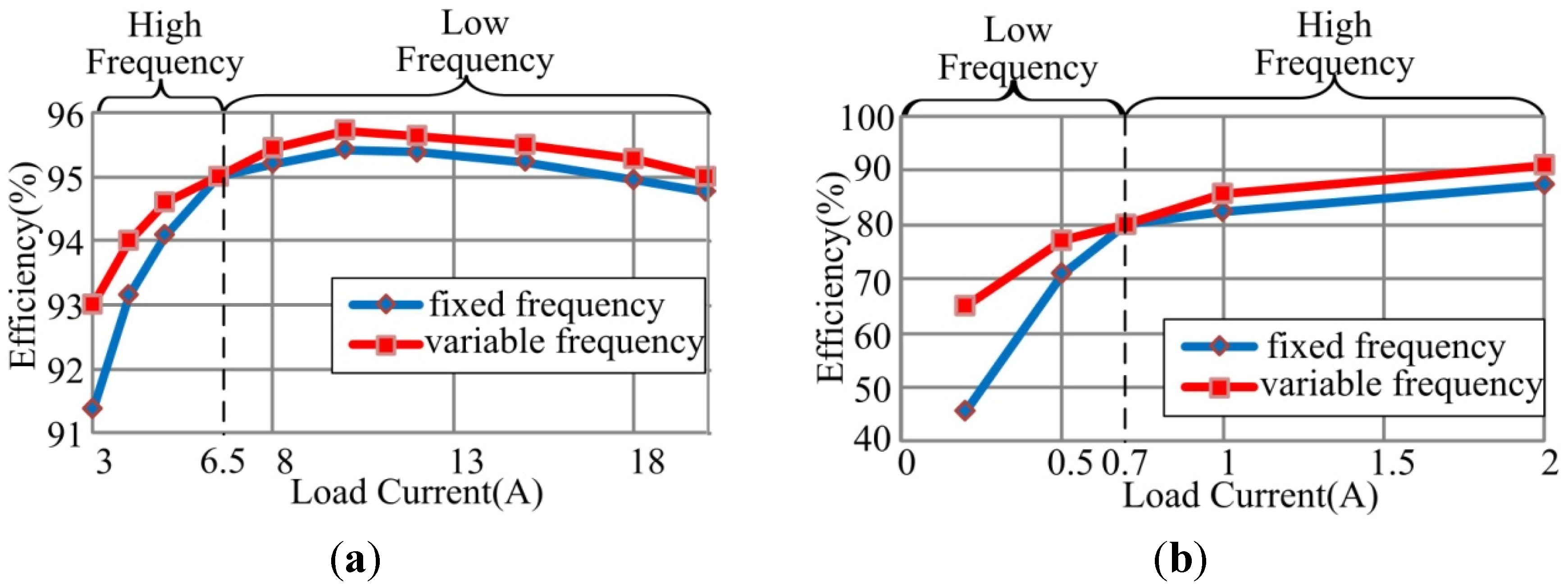
3. Switching Frequency Effect on Efficiency
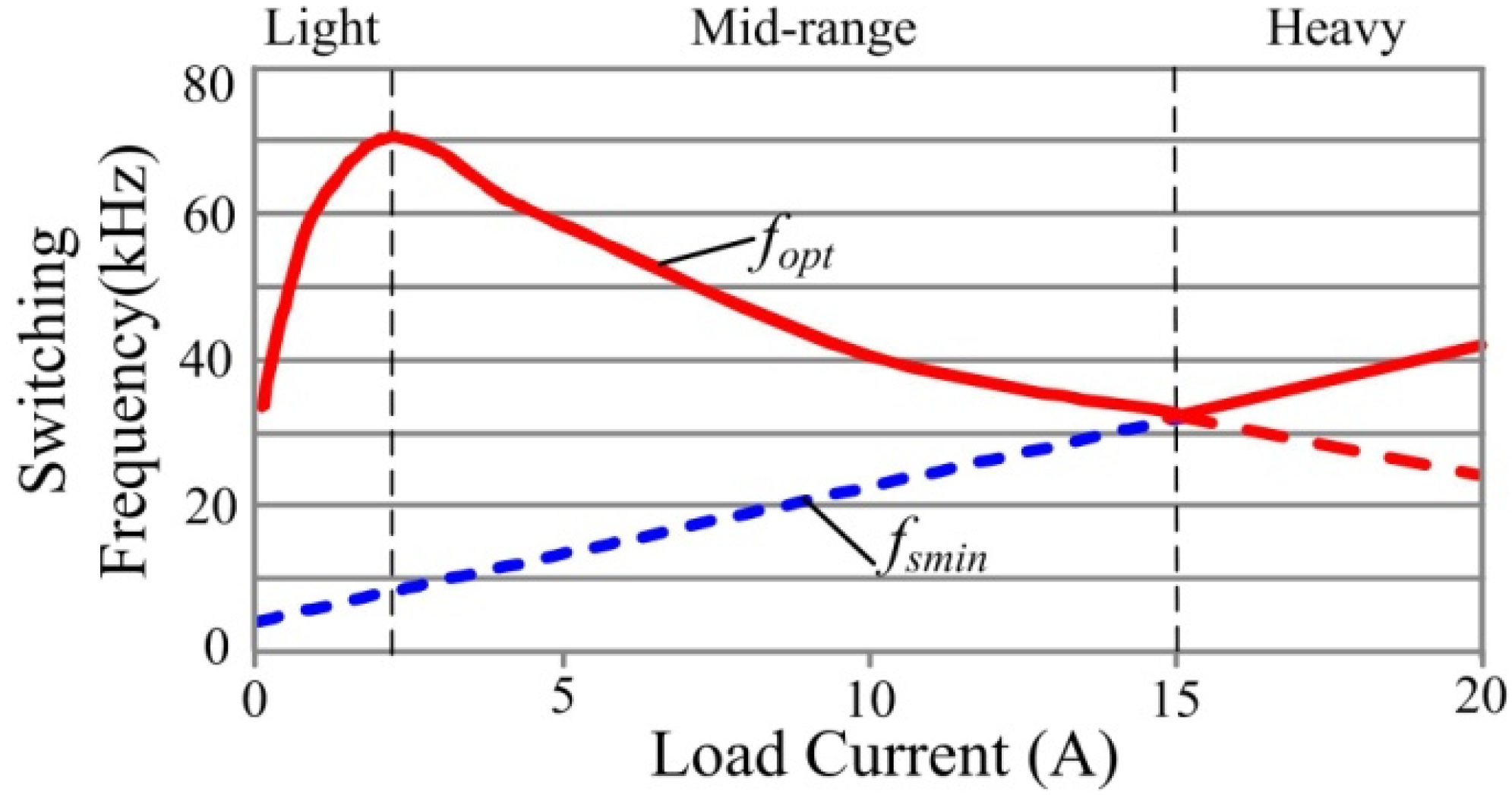
3.1. Optimum Switching Frequency


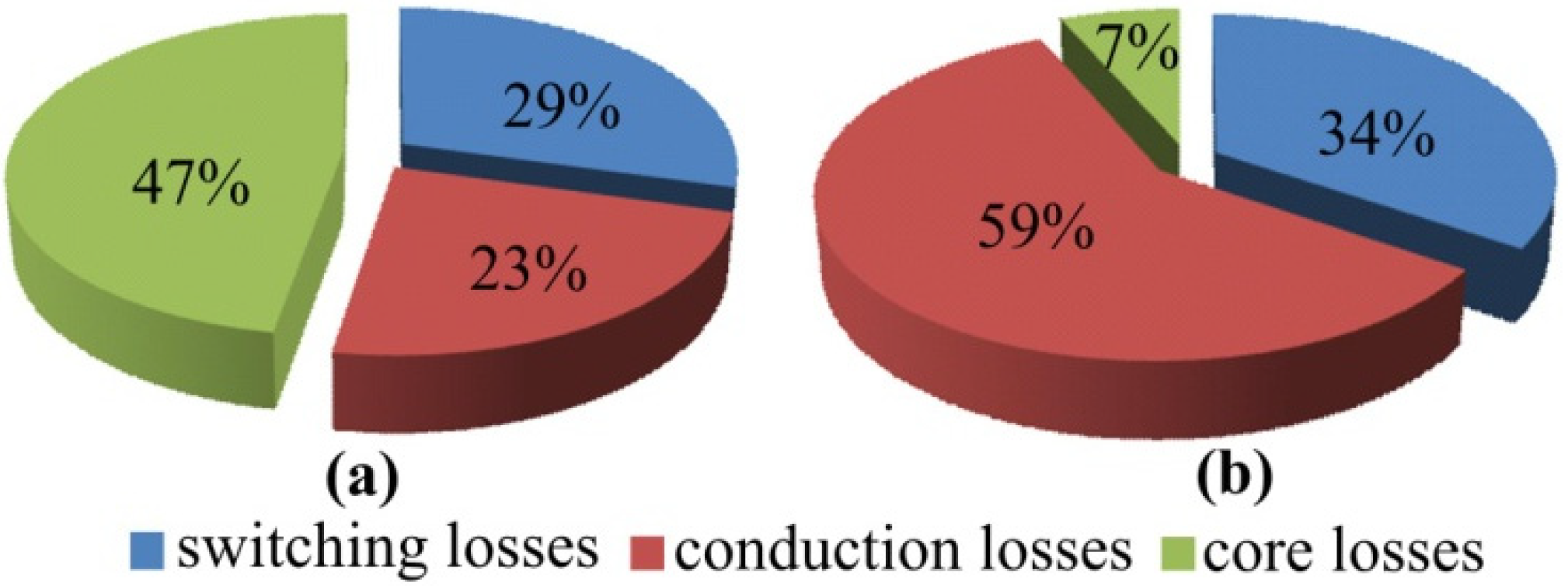
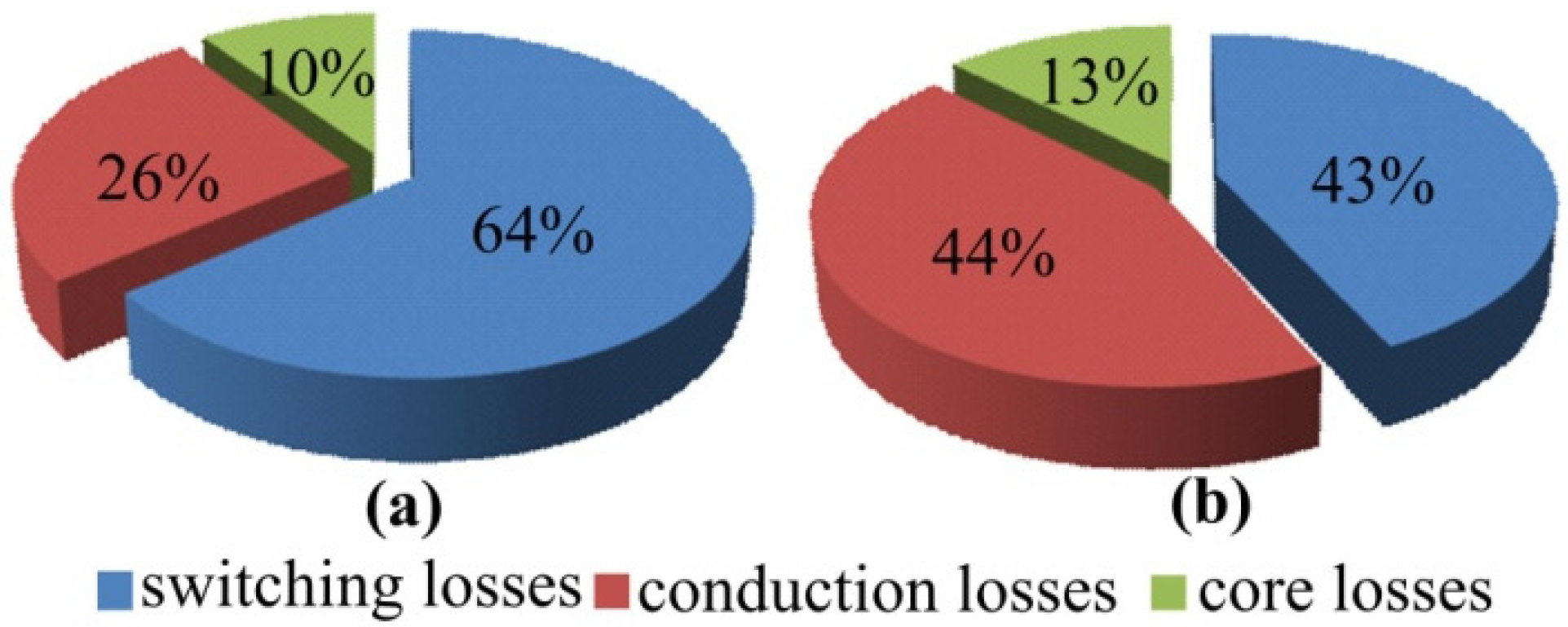
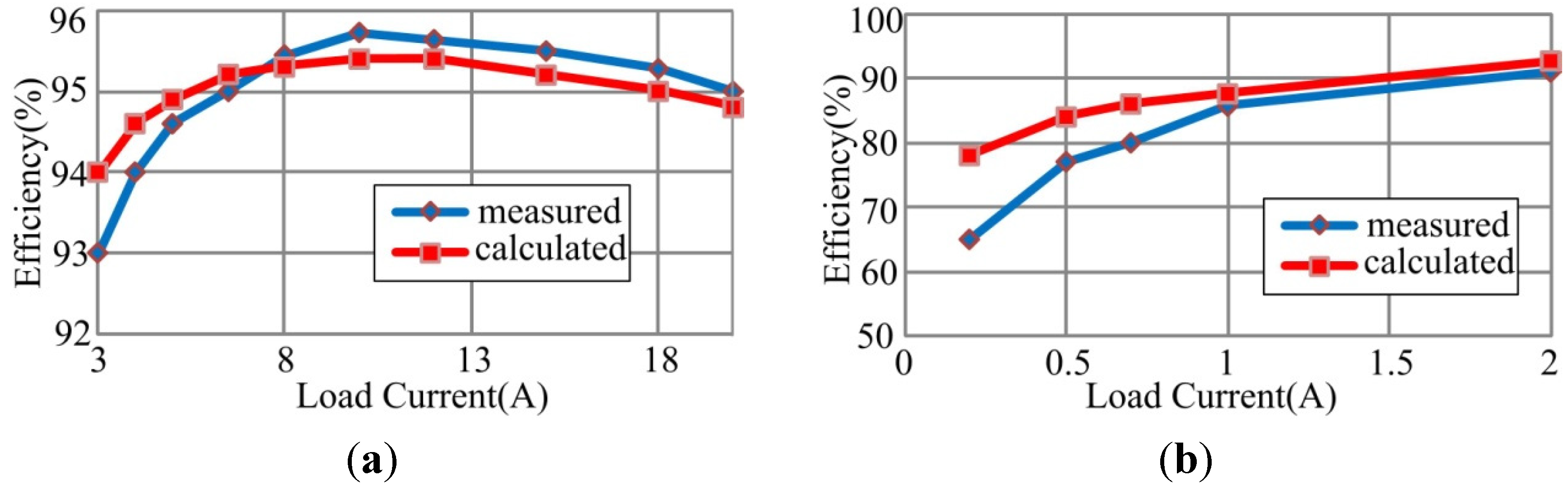
3.2. Losses Distributions Based on the Loss Analysis Model


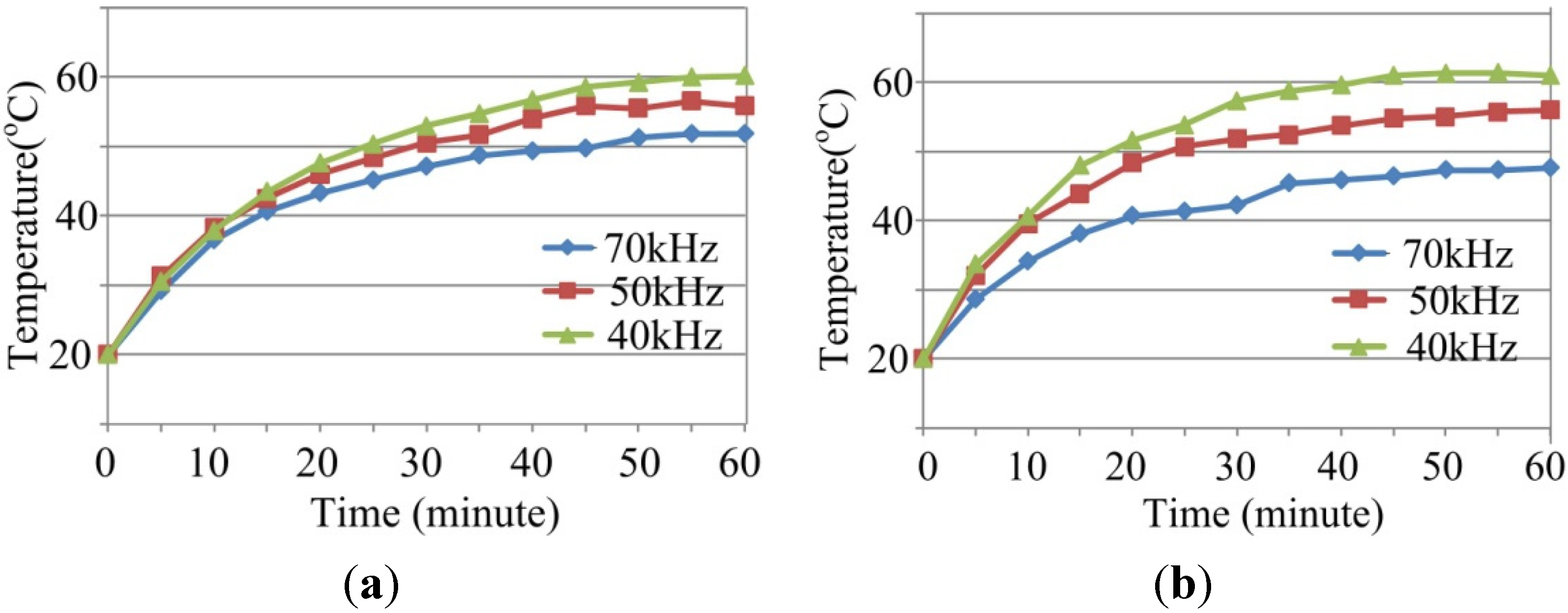
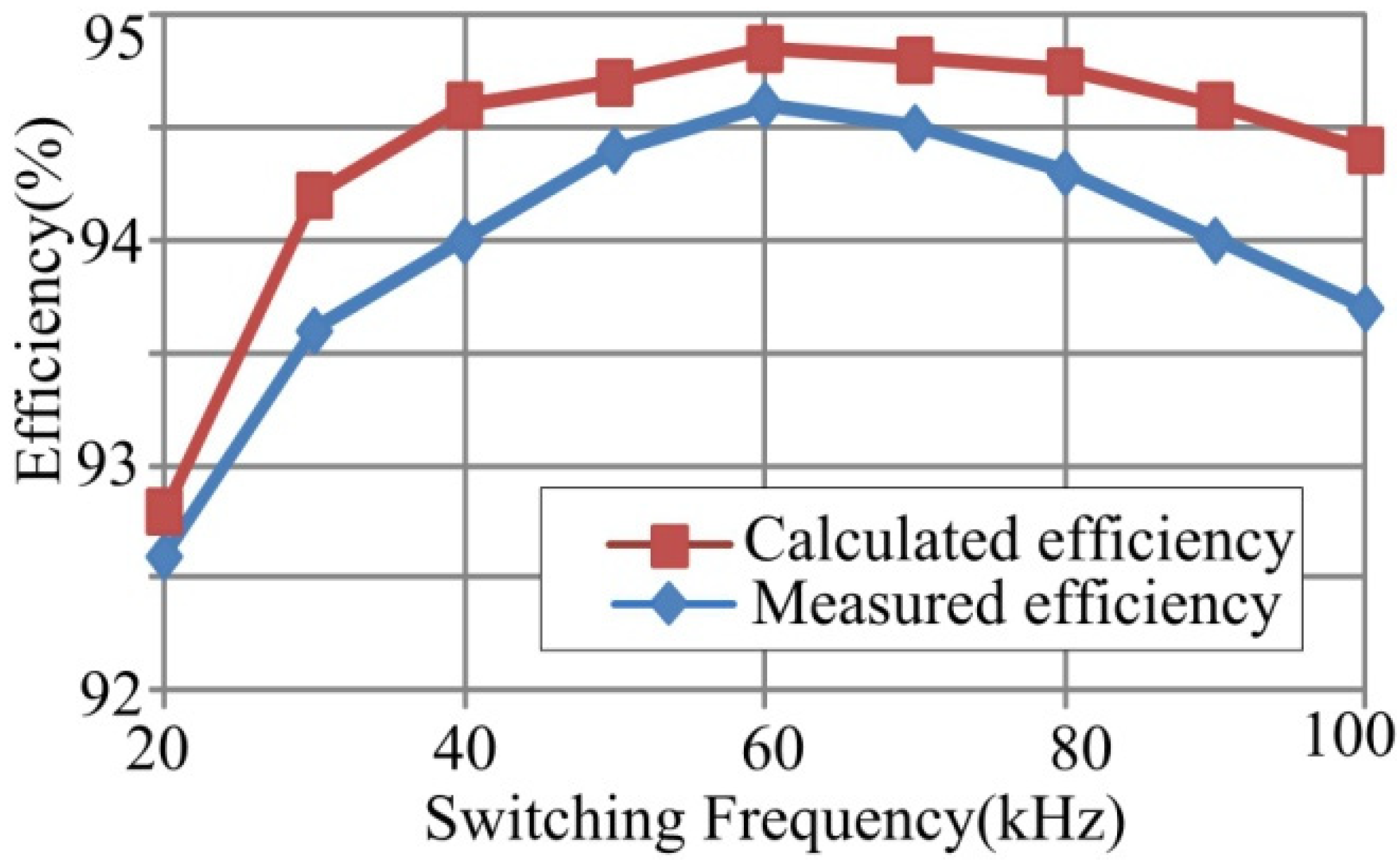
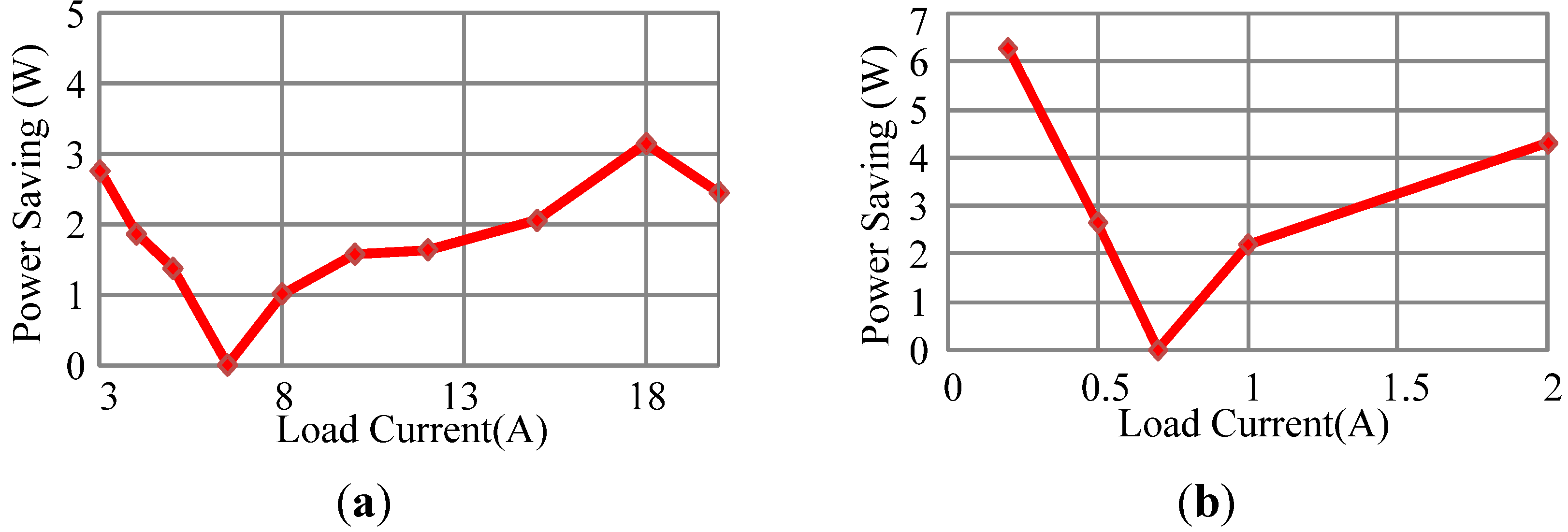
3.3. Experimental Efficiency Characterization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Value |
|---|---|---|
| Input Voltage | Vin | 400 V |
| Output Voltage | Vo | 48 V |
| Output Current | Io | 20 A |
| Turns Ratio | Ntr | 4 |
| Filter Inductor | Lo | 40 μH |
| MOSFETs | Q1~Q4 | ST26NM60 |
| Rectifier Diodes | D1-D2 | STTH6002 |

4. Control System with Load Adaptive Method
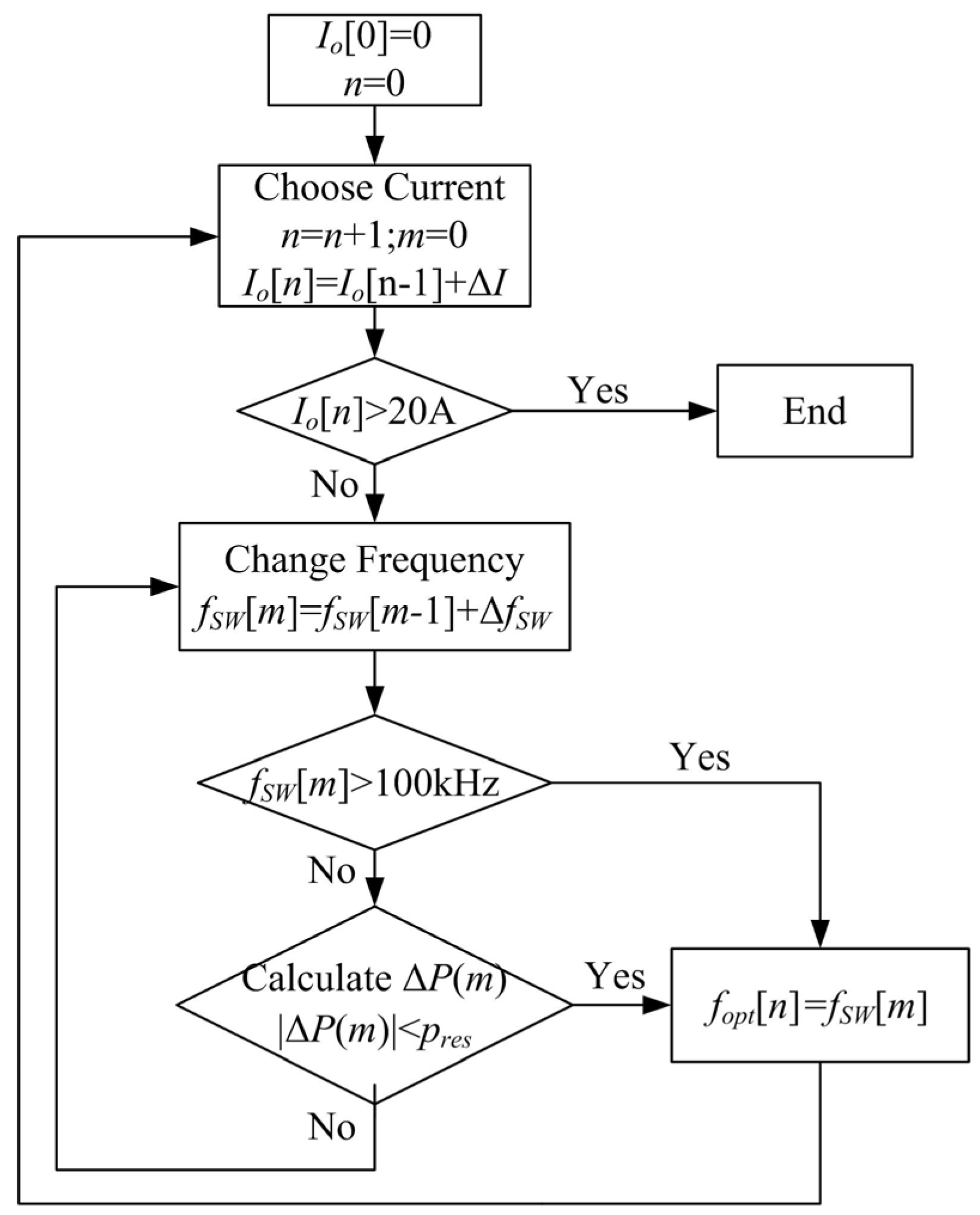
4.1. The Switching Frequency Optimization Procedure


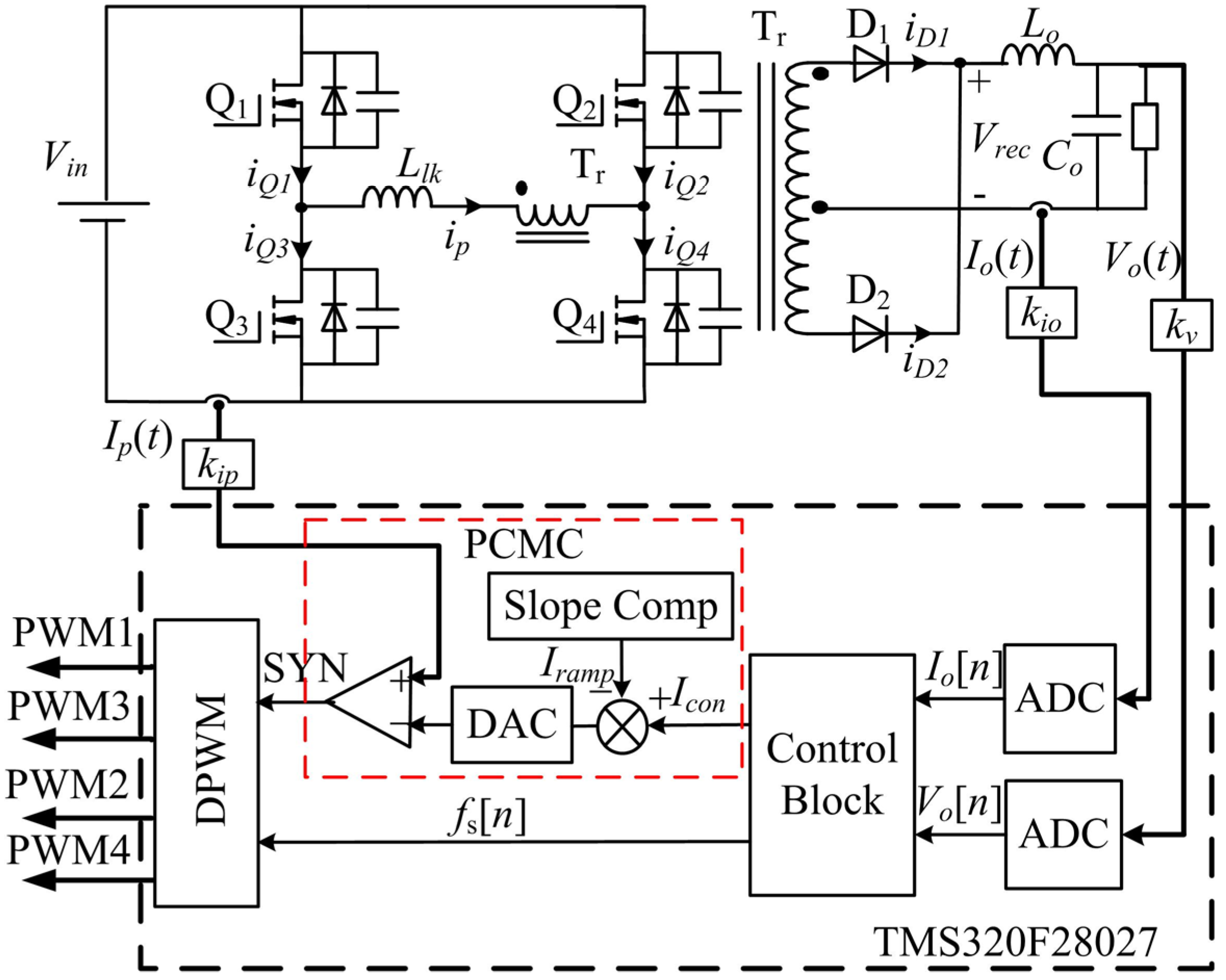
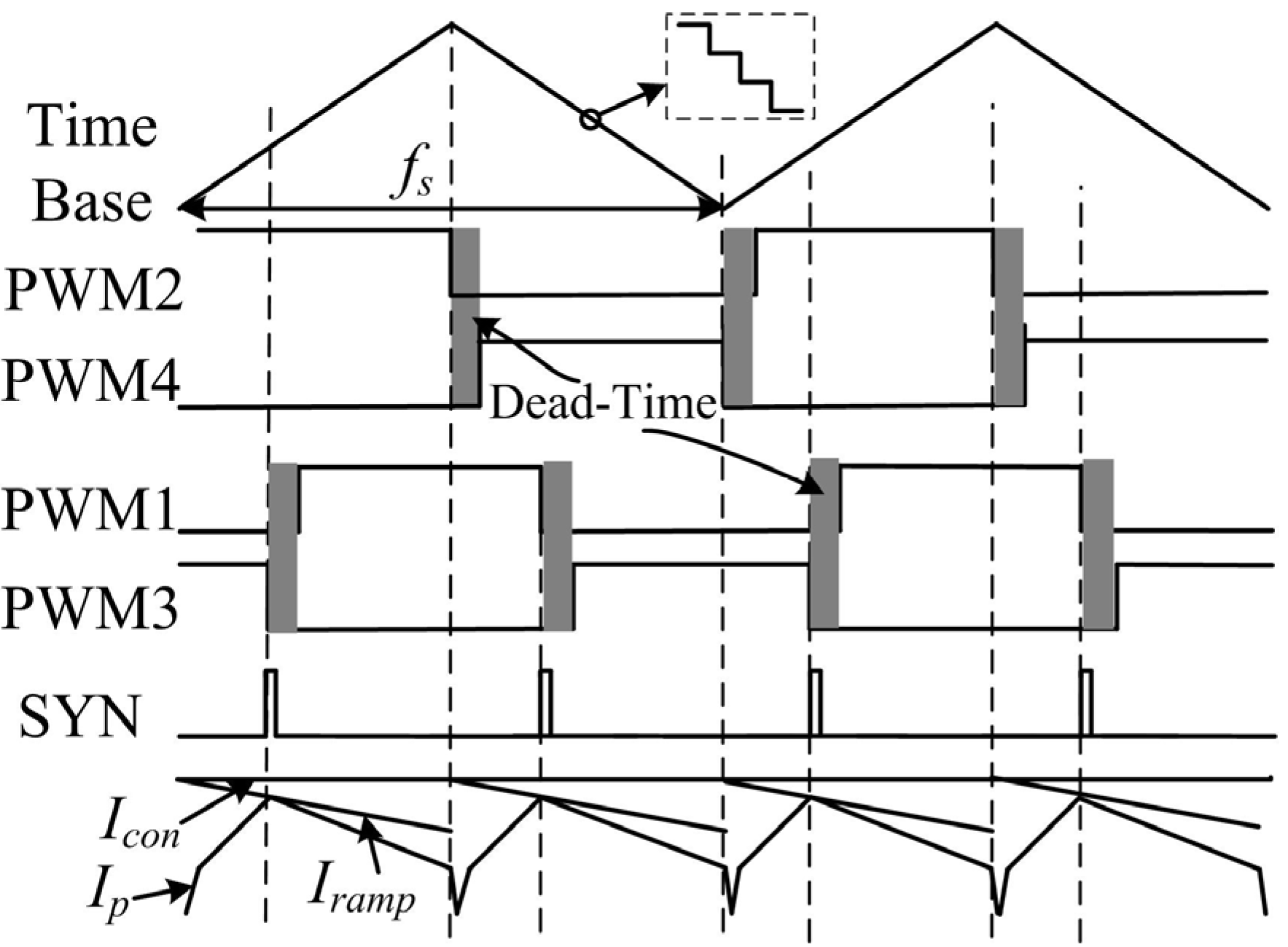
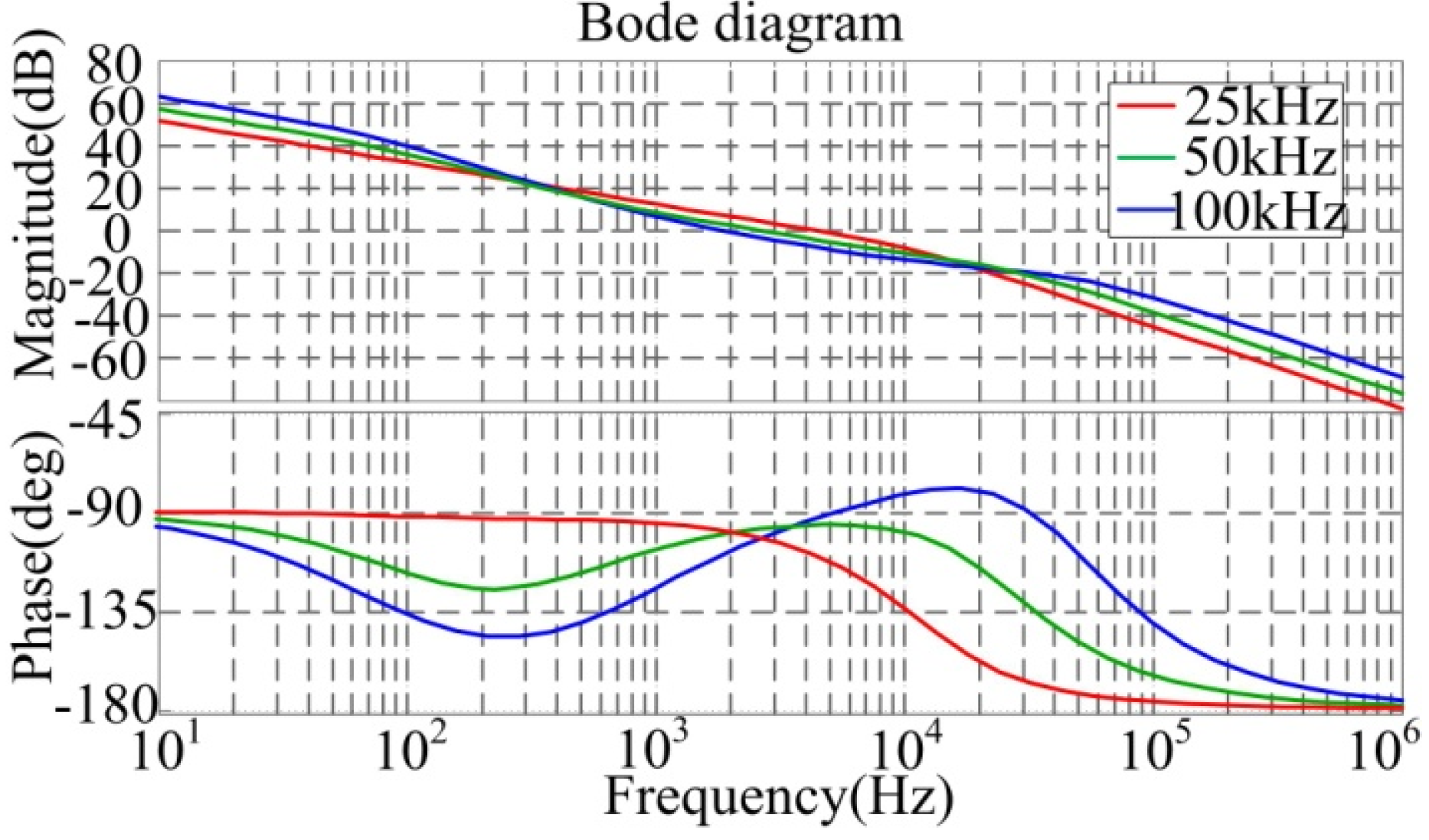
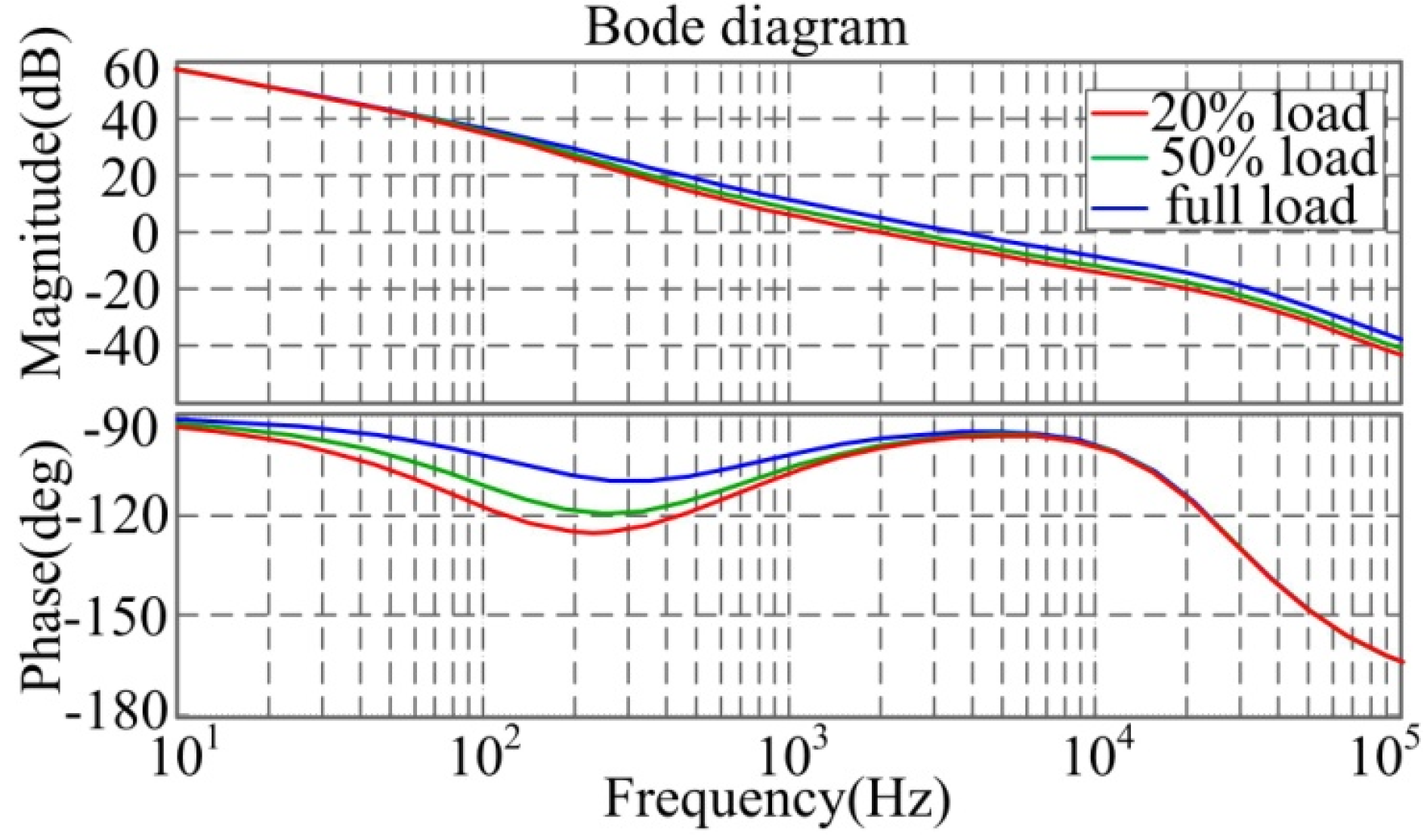
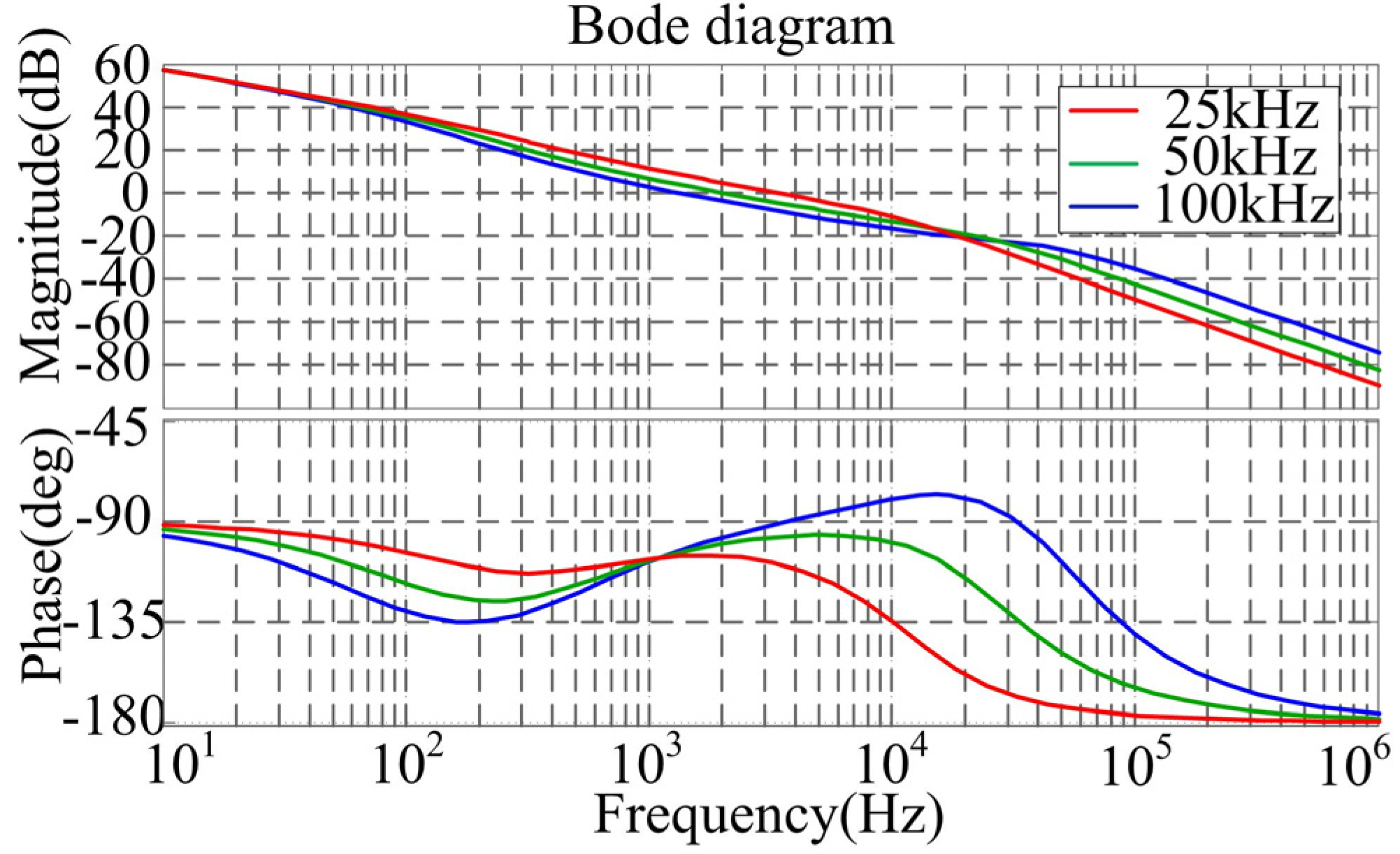
4.2. The Proposed Closed Loop Control System


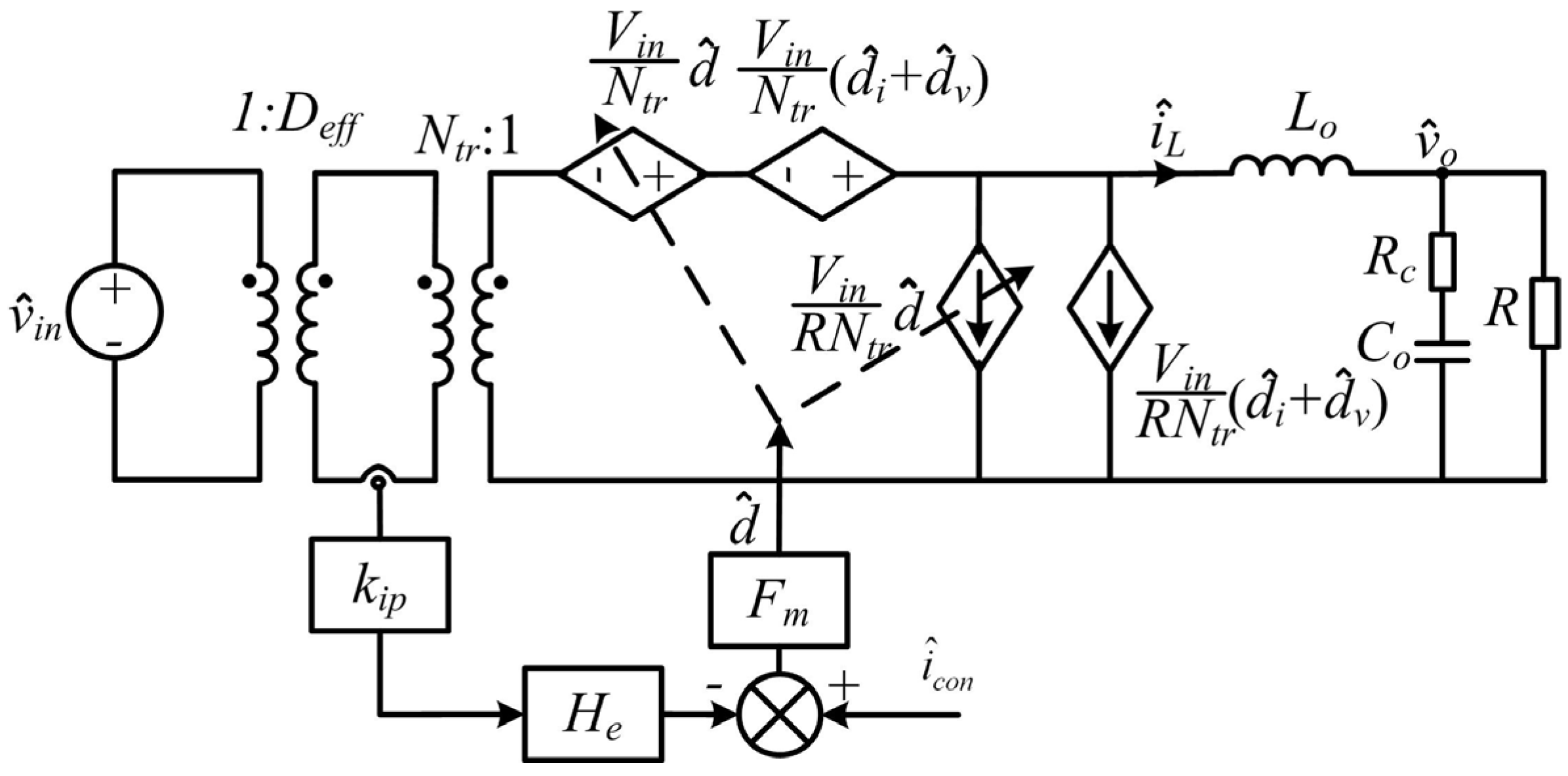
4.3. Design of the Adaptive Gain Adjustment Controller
- : the perturbation of duty cycle caused by ;
- : the perturbation of duty cycle caused by ;
- : the perturbation of peak current reference;






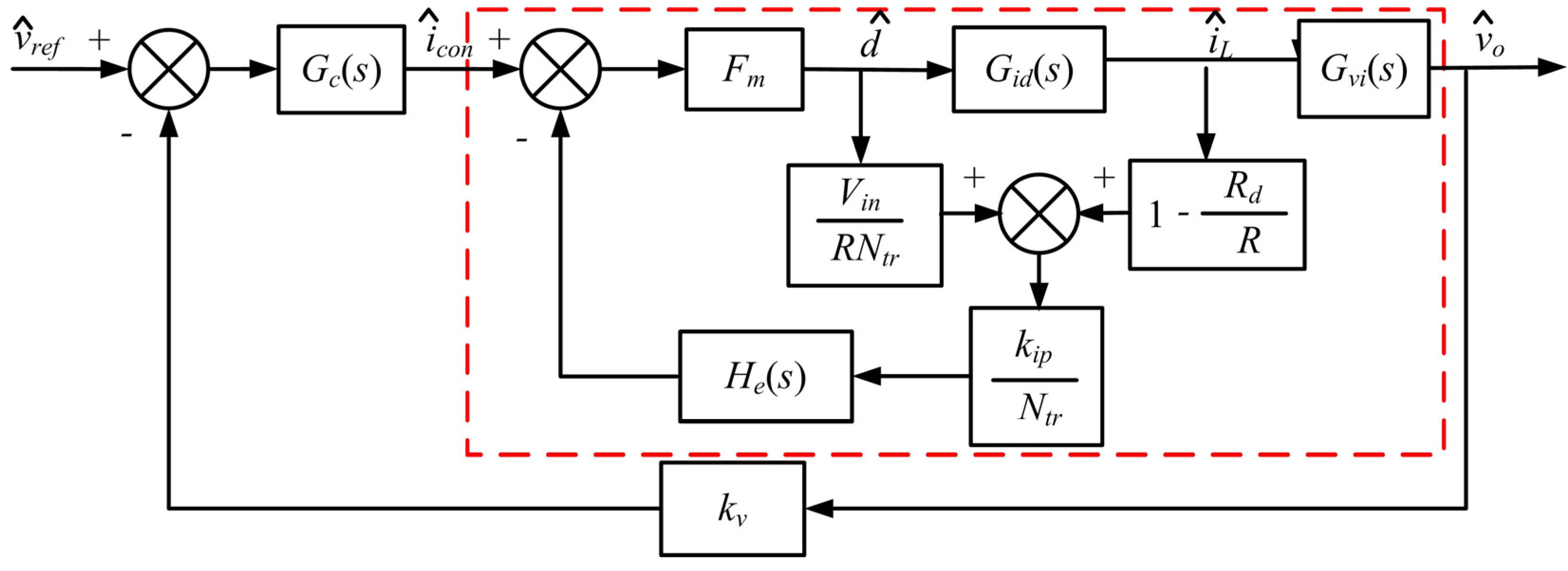
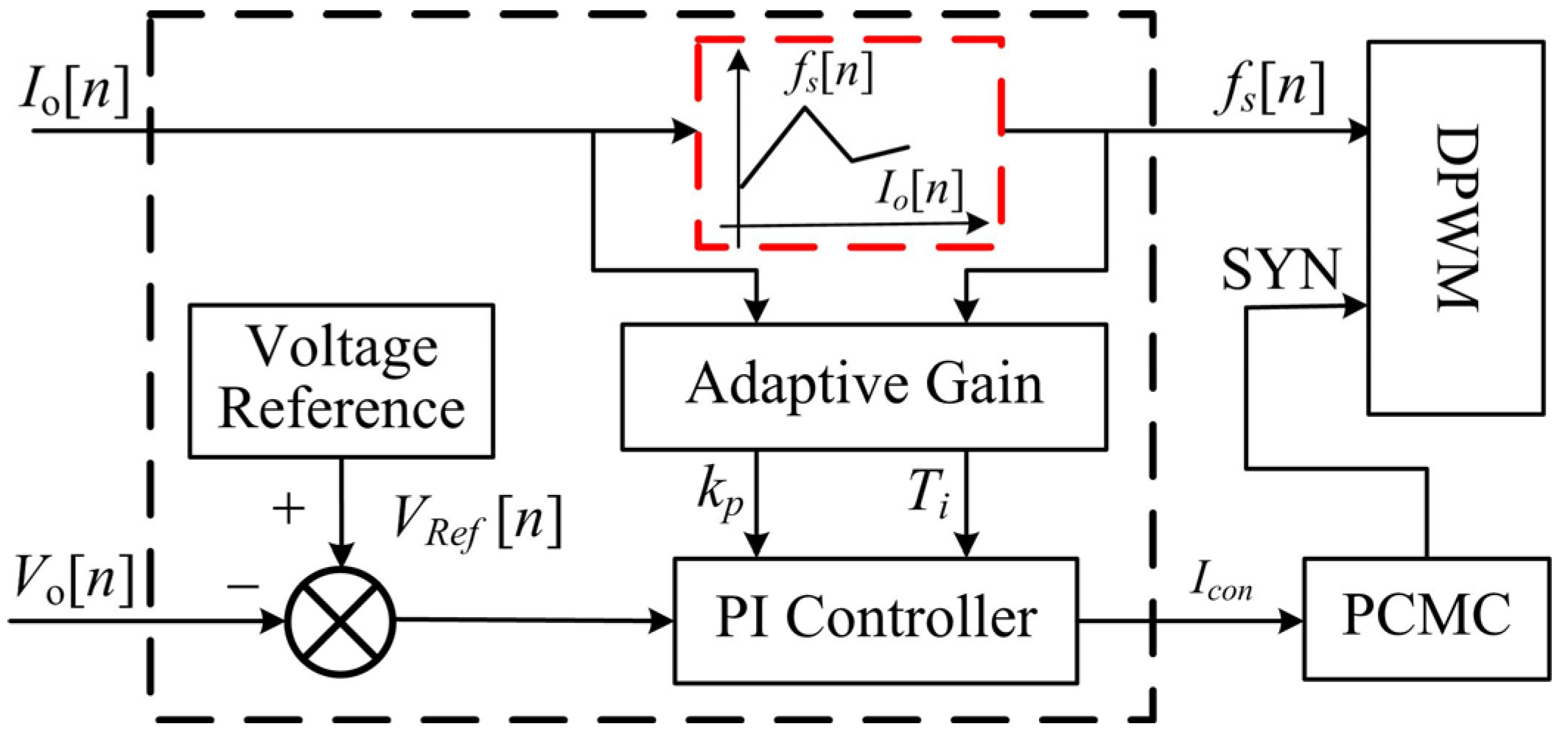
4.4. Control Block Diagram of the Proposed Method

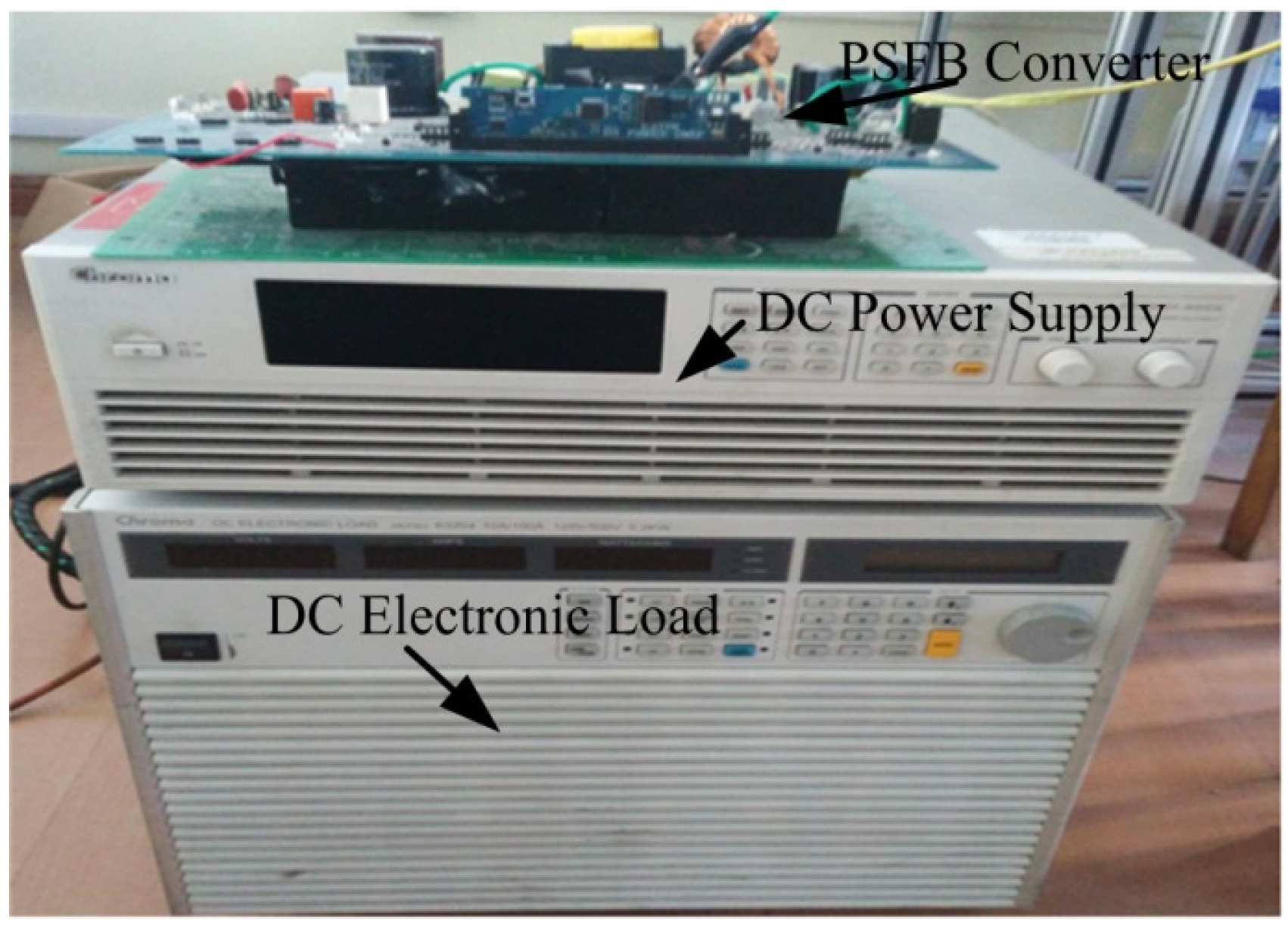
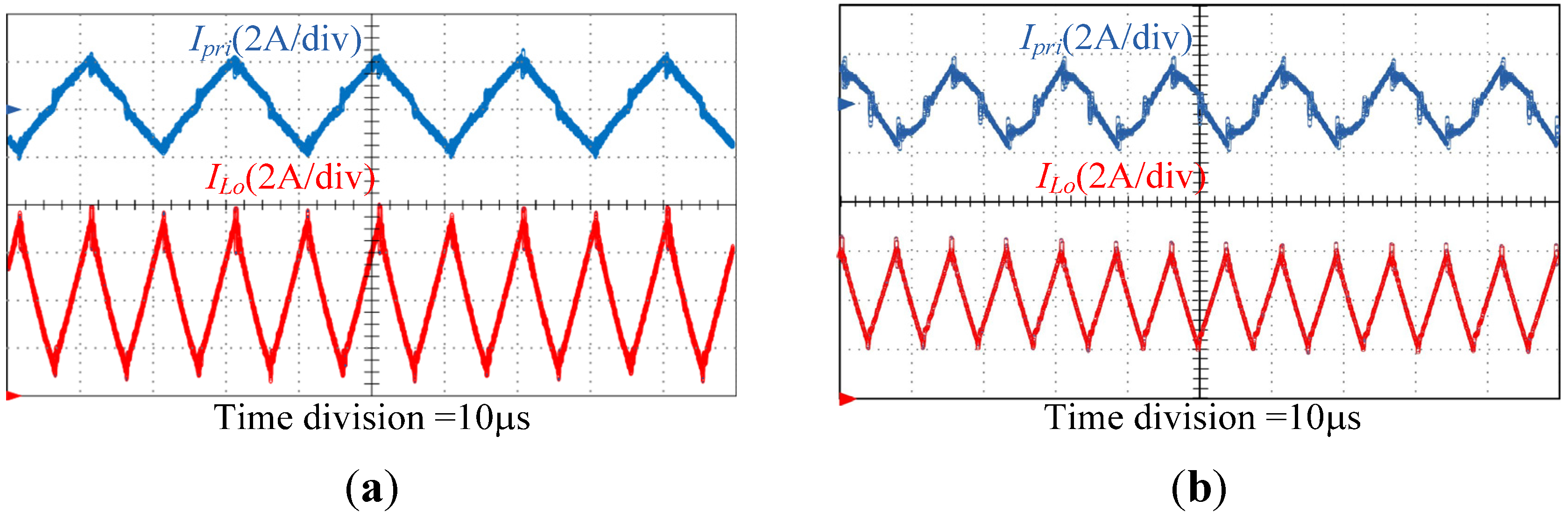
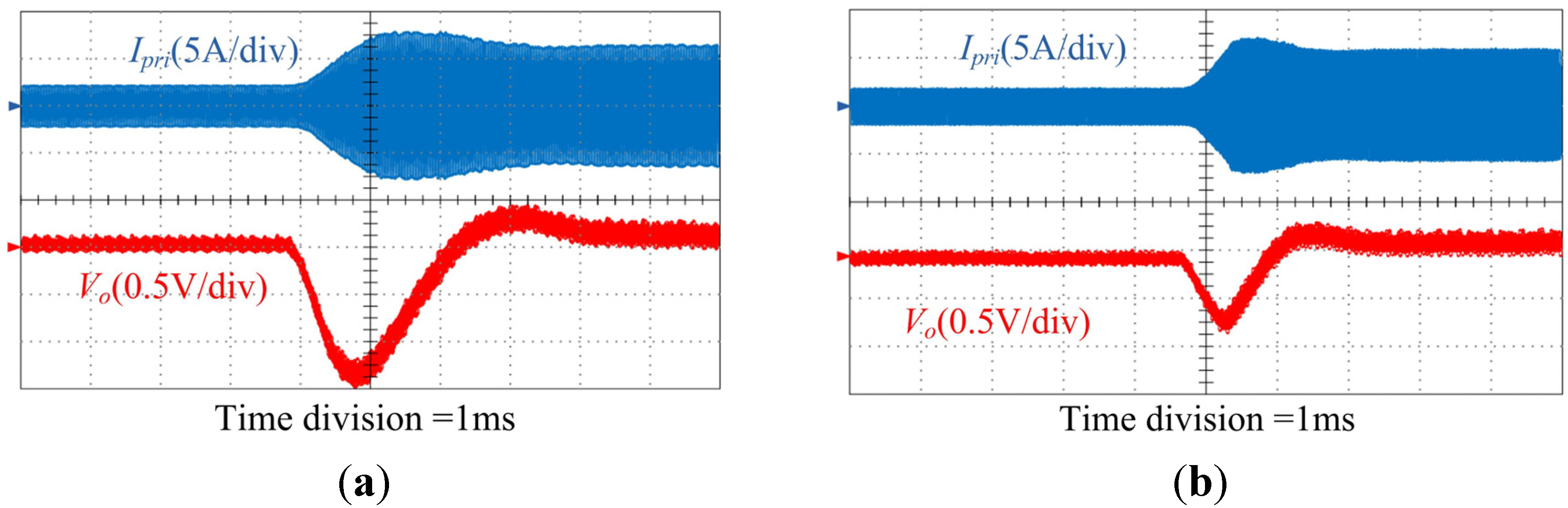
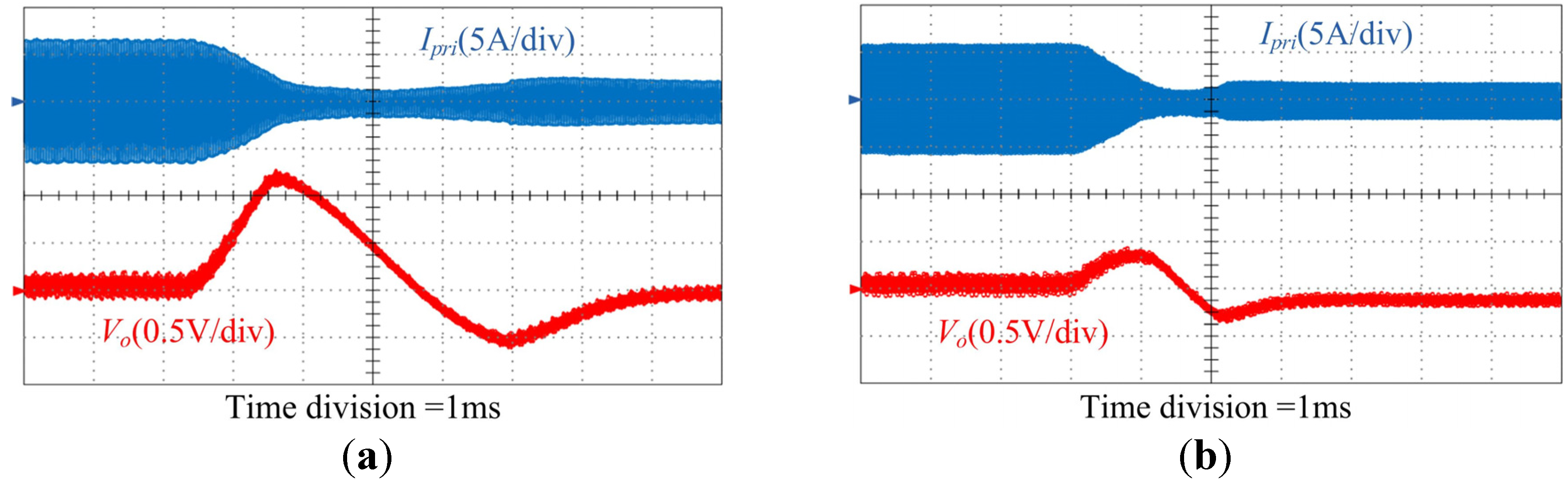
5. Experimental Results







6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, Y.D.; Cho, K.M.; Kim, D.-Y.; Moon, G.-W. Wide-range ZVS phase-shift full-bridge converter with reduced conduction loss caused by circulating current. IEEE Trans. Power Electron. 2013, 28, 3308–3316. [Google Scholar] [CrossRef]
- Shi, X.; Jiang, J.; Guo, X. An efficiency-optimized isolated bidirectional DC-DC converter with extended power range for energy storage systems in microgrids. Energies 2013, 6, 27–44. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, C.; Xiong, R.; Zhou, W. Study on the optimal charging strategy for lithium-ion batteries used in electric vehicles. Energies 2014, 7, 6783–6797. [Google Scholar] [CrossRef]
- Shiau, J.-K.; Ma, C.-W. Li-ion battery charging with a buck-boost power converter for a solar powered battery management system. Energies 2013, 6, 1669–1699. [Google Scholar] [CrossRef]
- Lai, C.-M.; Yang, M.-J.; Liang, S.-K. A zero input current ripple ZVS/ZCS boost converter with boundary-mode control. Energies 2014, 7, 6765–6782. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, S.; Shi, L. A soft switching full bridge converter with reduced parasitic oscillation in a wide load range. IEEE Trans. Power Electron. 2014, 29, 801–811. [Google Scholar] [CrossRef]
- Yang, B.J.; Duarte, L.; Li, W.; Yin, K.X.; Deng, Y. Phase-shifted full bridge converter featuring ZVS over the full load range. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 644–649.
- Chen, B.Y.; Lai, Y.S. Switching control technique of phase-shift-controlled full-bridge converter to improve efficiency under light-load and standby conditions without additional auxiliary components. IEEE Trans. Power Electron. 2010, 25, 1001–1012. [Google Scholar] [CrossRef]
- Kim, J.W.; Kim, D.Y.; Kim, C.E.; Moon, G.W. A simple switching control technique for improving light load efficiency in a phase-shifted full-bridge converter with a server power system. IEEE. Power Electron. Lett. 2014, 29, 1562–1566. [Google Scholar] [CrossRef]
- Kim, D.Y.; Kim, C.E.; Moon, G.W. Variable delay time method in the phase-shifted full-bridge converter for reduced power consumption under light load conditions. IEEE Trans. Power Electron. 2013, 28, 5120–5127. [Google Scholar] [CrossRef]
- Abu-Qahouq, J.A.; Al-Hoor, W.; Mikhael, W.; Huang, L.; Batarseh, I. Analysis and design of an adaptive-step-size digital controller for switching frequency autotuning. IEEE Trans Circuits Syst. I Reg. Pap. 2009, 56, 2749–2759. [Google Scholar] [CrossRef]
- Al-Hoor, W.; Abu-Qahouq, J.A.; Huang, L.; Mikhael, W.B.; Batarseh, I. Adaptive digital controller and design considerations for a variable switching frequency voltage regulator. IEEE Trans. Power Electron. 2009, 24, 2589–2602. [Google Scholar] [CrossRef]
- Arbetter, B.; Erickson, R.; Maksimovid, D. DC-DC converter design for battery-operated systems. In Proceedings of the 26th Annual IEEE Power Electronics Specialists Conference, Atlanta, GA, USA, 18–22 June 1995; pp. 103–109.
- Abu-Qahouq, J.A.; Abdel-Rahman, O.; Huang, L.; Batarseh, I. On load adaptive control of voltage regulators for power managed loads: Control schemes to improve converter efficiency and performance. IEEE Trans. Power Electron. 2007, 22, 1806–1819. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, S.; Shi, L.; Ji, F. A power loss comparison of two full bridge converters with auxiliary networks. In Proceedings of the 7th International Power Electronics and Motion Control Conference (IPEMC), Harbin, China, 2–5 June 2012; pp. 1888–1893.
- Petkov, R. Optimum design of a high-power, high-frequency transformer. IEEE Trans. Power Electron. 1996, 11, 33–42. [Google Scholar] [CrossRef]
- Cho, B.H.; Sabate, J.A.; Vlatkovic, V.; Ridely, R.B.; Lee, F.C. Design considerations for high-voltage high-power full-bridge zero-voltage-switched PWM converter. In Proceedings of the Fifth Annual Applied Power Electronics Conference and Exposition, Los Angeles, CA, USA, 11–16 March 1990; pp. 275–284.
- Vlatkovic, V.; Sabate, J.A.; Ridley, R.B.; Lee, F.C.; Cho, B.H. Small-signal analysis of the phase-shifted PWM converter. IEEE Trans. Power Electron. 1992, 7, 128–135. [Google Scholar] [CrossRef]
- Peterchev, A.V.; Sanders, S.R. Quantization resolution and limit cycling in digitally controlled PWM converters. IEEE Trans. Power Electron. 2003, 18, 301–308. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer: New York, NY, USA, 2001. [Google Scholar]
- Emami, Z.; Nikpendar, M.; Shafiei, N.; Motahari, S.R. Leading and lagging legs power loss analysis in ZVS phase-shift full bridge converter. In Proceedings of the 2nd Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Tehran, Iran, 16–17 February 2011; pp. 632–637.
- Burkel, R.; Schneider, T. Characteristics and Applications of Fast Recovery Epitaxial Diodes; IXYS Corporation: Milpitas, CA, USA, 1999. [Google Scholar]
- Chen, Z.; Liu, S.; Ji, F. Power loss analysis and comparison of two full-bridge converters with auxiliary networks. IET Power Electron. 2012, 5, 1934–1943. [Google Scholar] [CrossRef]
- Yan, Y.; Lee, F.C.; Mattavelli, P. Comparison of small signal characteristics in current mode control schemes for point-of-load buck converter applications. IEEE Trans. Power Electron. 2013, 28, 3405–3414. [Google Scholar] [CrossRef]
- Xu, X. Small-signal model for current mode control full-bridge phase-shifted ZVS converter. In Proceedings of the Third International Power Electronics and Motion Control Conference, Beijing, China, 15–18 August 2000; pp. 514–518.
- Suntio, T. Analysis and modeling of peak-current-mode-controlled buck converter in DICM. IEEE Trans. Ind. Electron. 2001, 48, 127–135. [Google Scholar] [CrossRef]
- Ridley, R.B. A new, continuous-time model for current-mode control. IEEE Trans. Power Electron. 1991, 6, 271–280. [Google Scholar] [CrossRef]
- Zhang, J.; Zou, Y.; Zhang, Y.; Tang, J. DSP Implementation of digitally controlled SMPS. In Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1484–1488.
- Liu, Y.F.; Meyer, E.; Liu, X. Recent developments in digital control strategies for DC/DC switching power converters. IEEE Trans. Power Electron. 2009, 24, 2567–2577. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Li, H.; Liu, Y.; Li, Z. High Efficiency Variable-Frequency Full-Bridge Converter with a Load Adaptive Control Method Based on the Loss Model. Energies 2015, 8, 2647-2673. https://doi.org/10.3390/en8042647
Zhao L, Li H, Liu Y, Li Z. High Efficiency Variable-Frequency Full-Bridge Converter with a Load Adaptive Control Method Based on the Loss Model. Energies. 2015; 8(4):2647-2673. https://doi.org/10.3390/en8042647
Chicago/Turabian StyleZhao, Lei, Haoyu Li, Yuan Liu, and Zhenwei Li. 2015. "High Efficiency Variable-Frequency Full-Bridge Converter with a Load Adaptive Control Method Based on the Loss Model" Energies 8, no. 4: 2647-2673. https://doi.org/10.3390/en8042647