
RETRACTED: A Robust WLS Power System State Estimation Method Integrating a Wide-Area Measurement System and SCADA Technology
Abstract
:1. Introduction
2. A State Estimation Method Integrating WAMS and SCADA
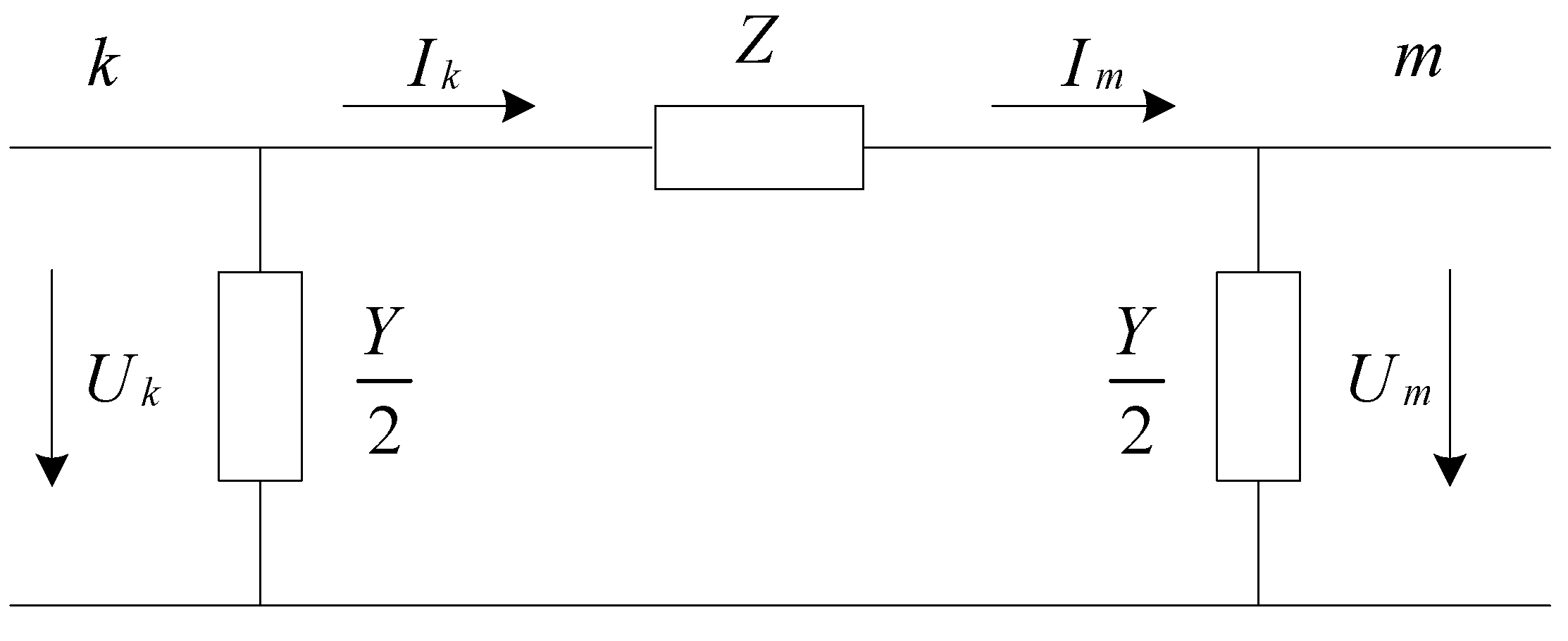
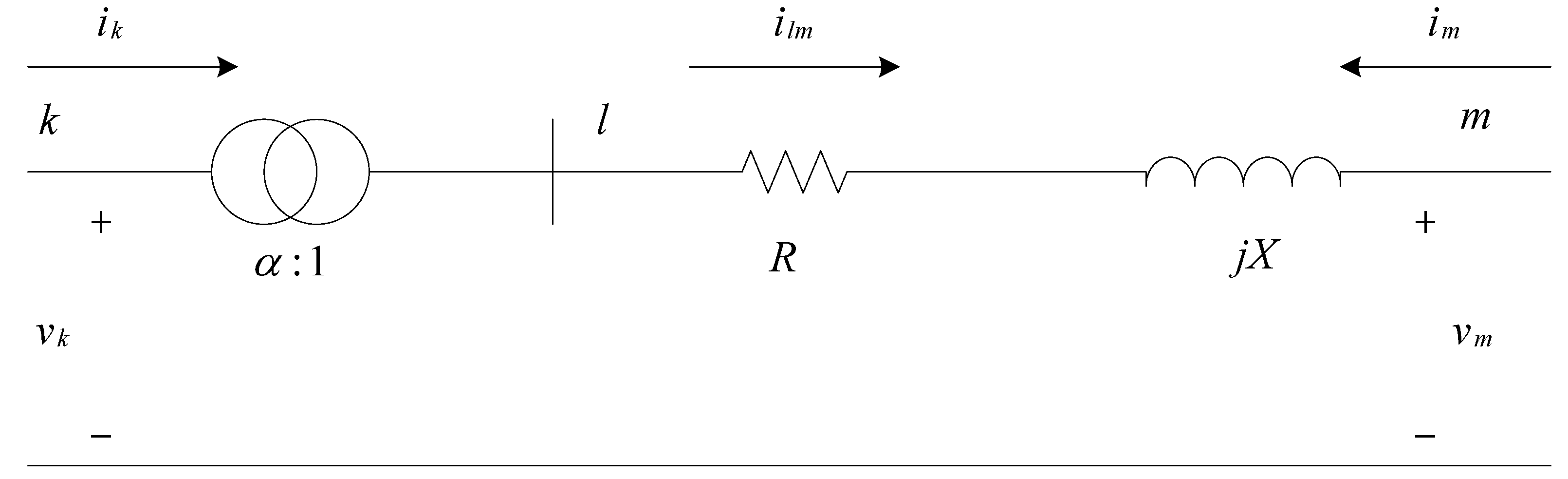
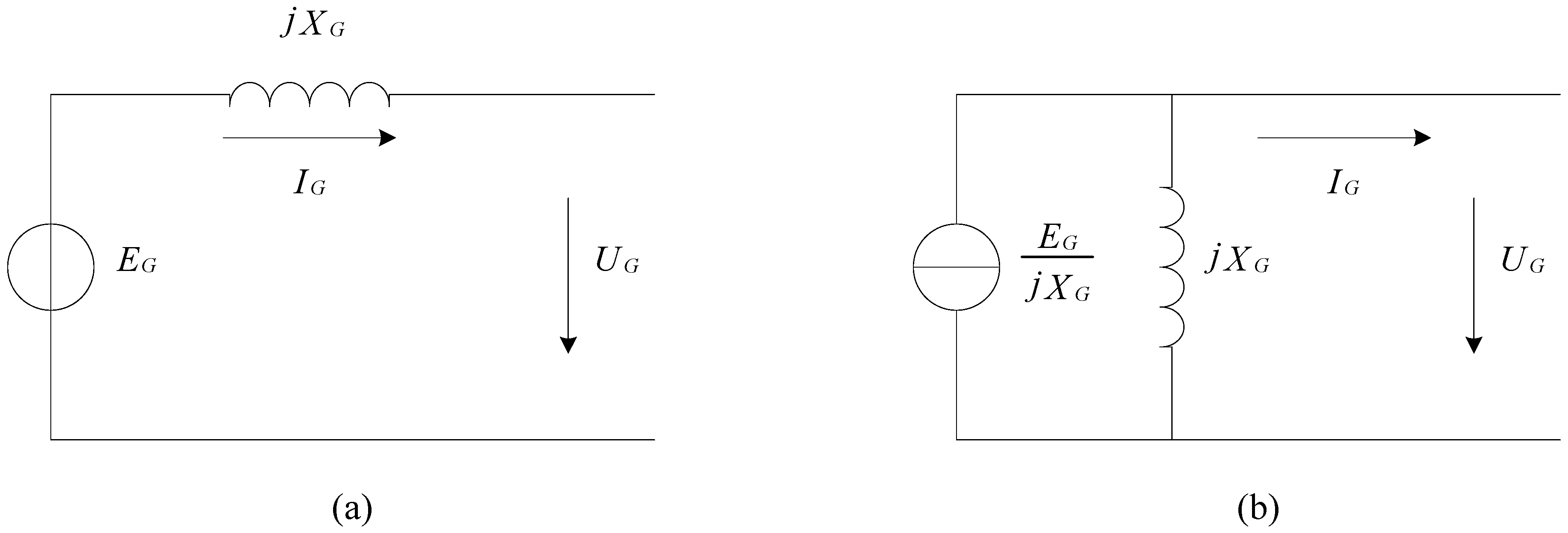
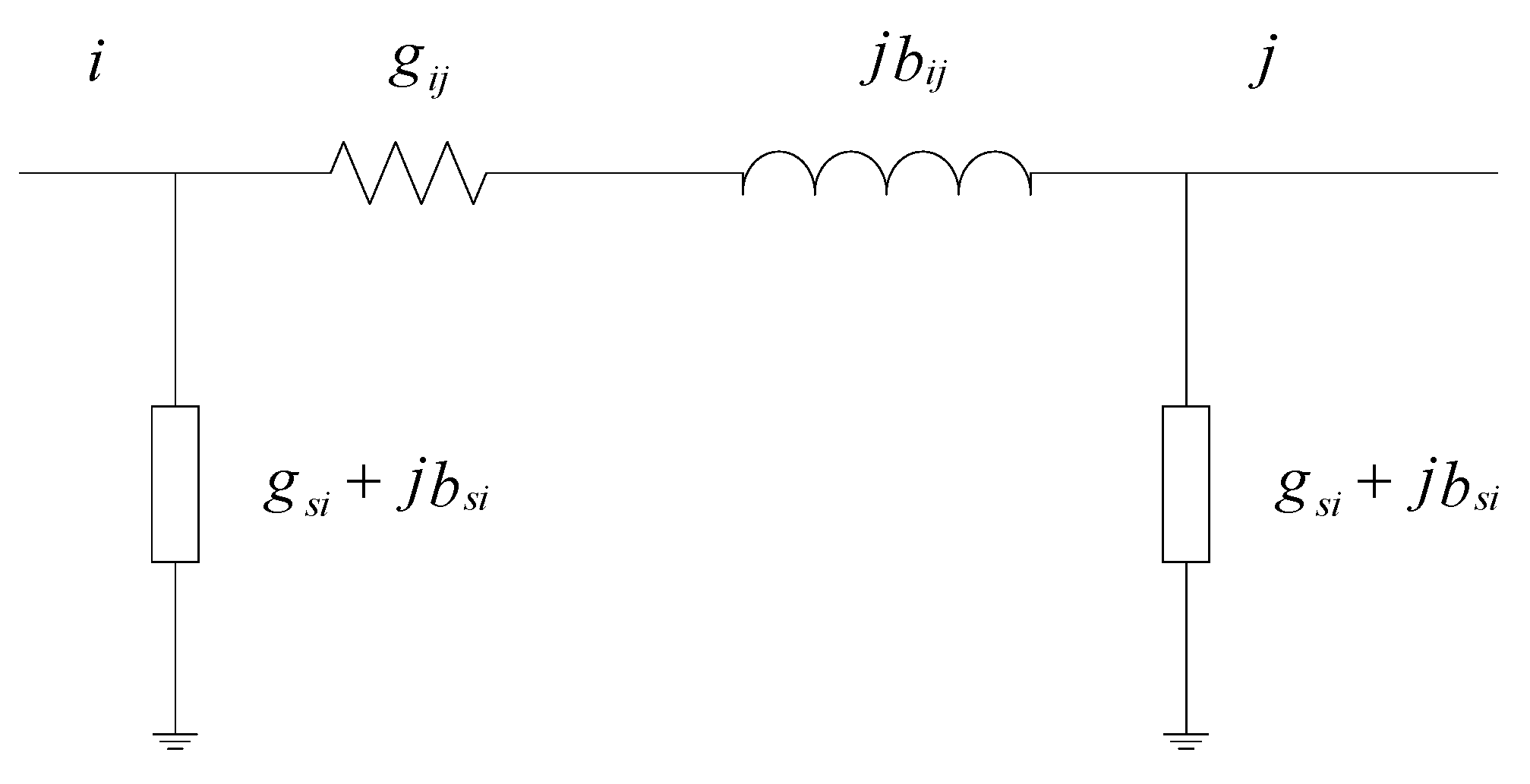
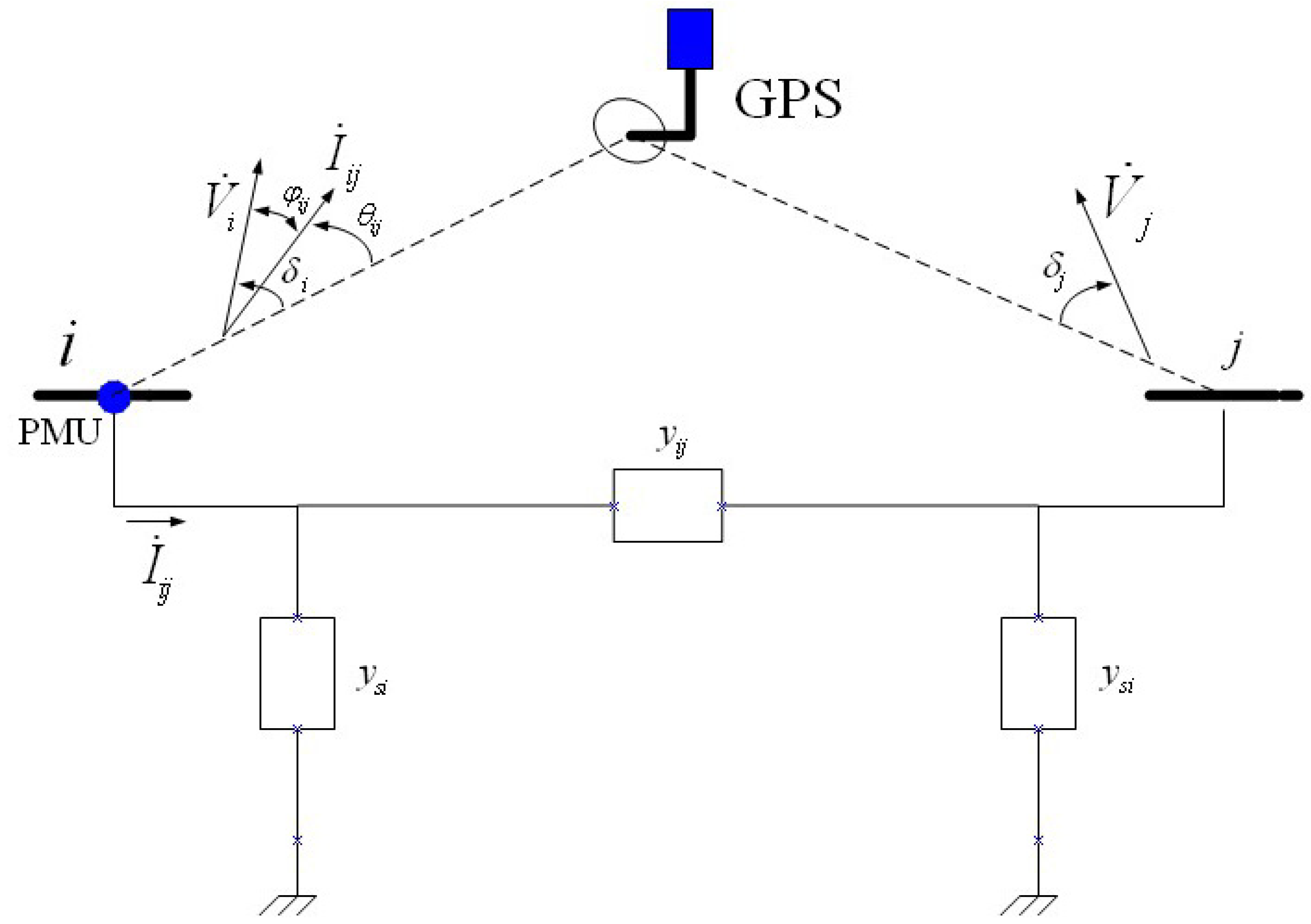
2.1. Model Analysis of Power System State Estimation




2.2. Proposed Power System State Estimation Method

3. Performance Evaluation
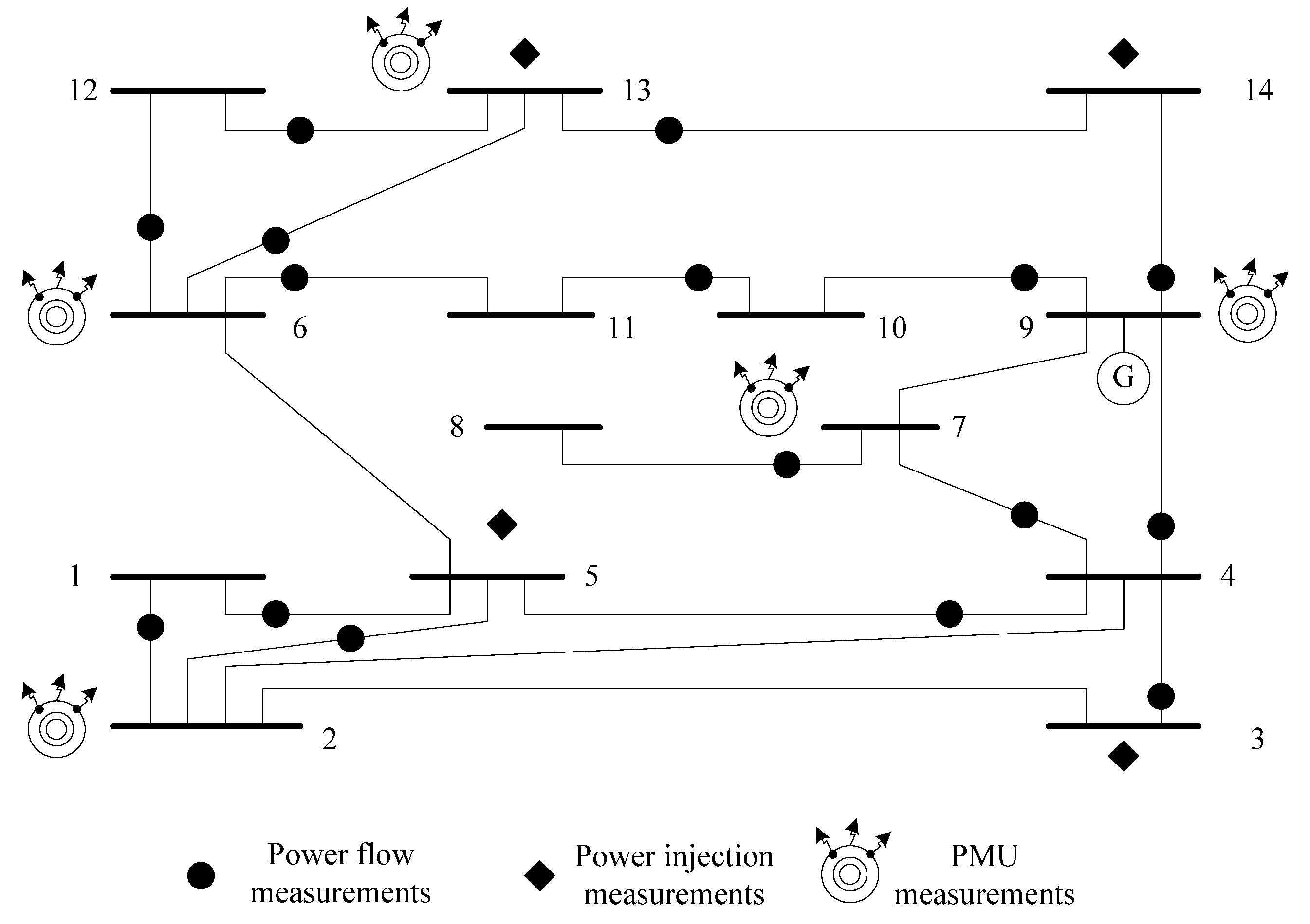
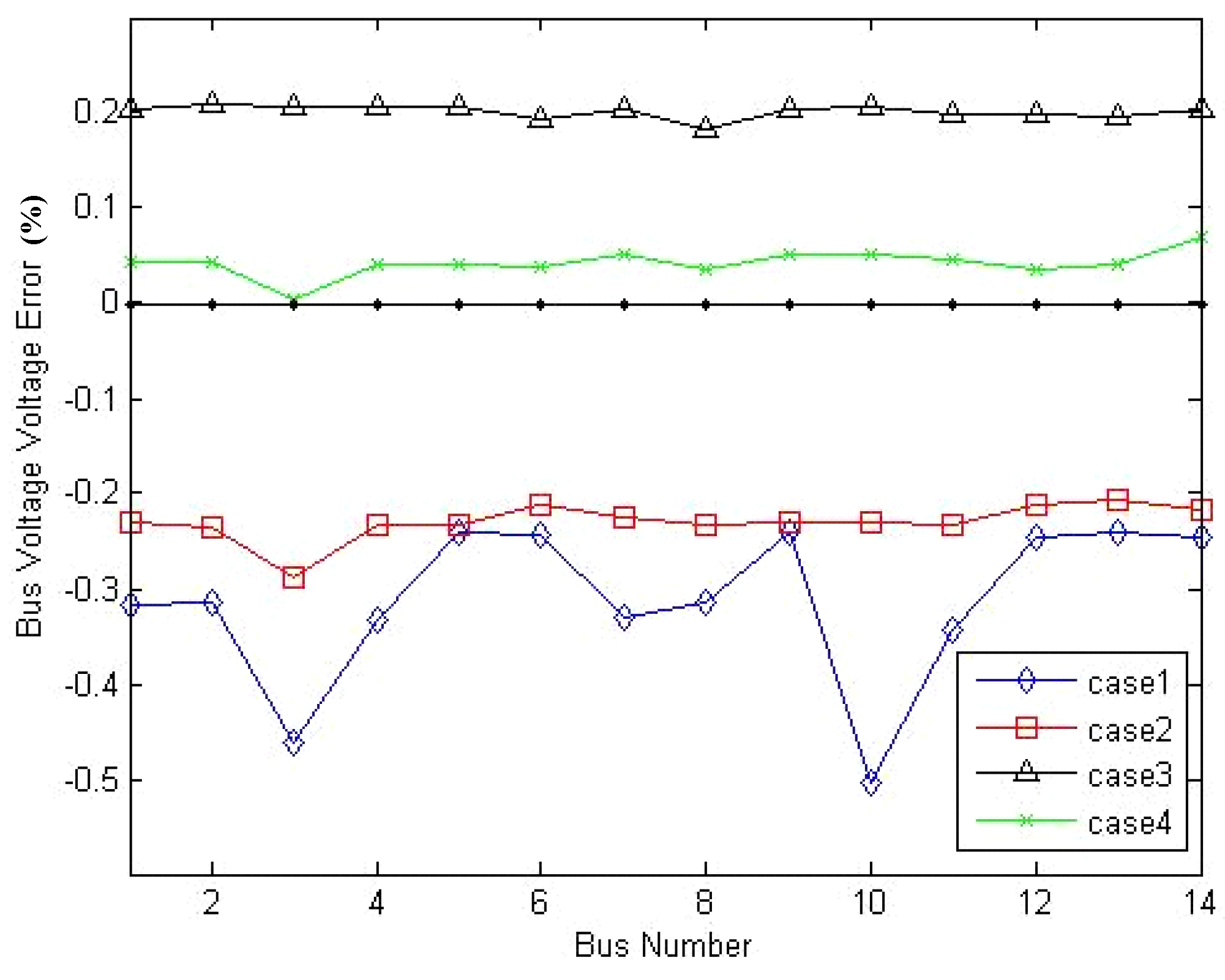
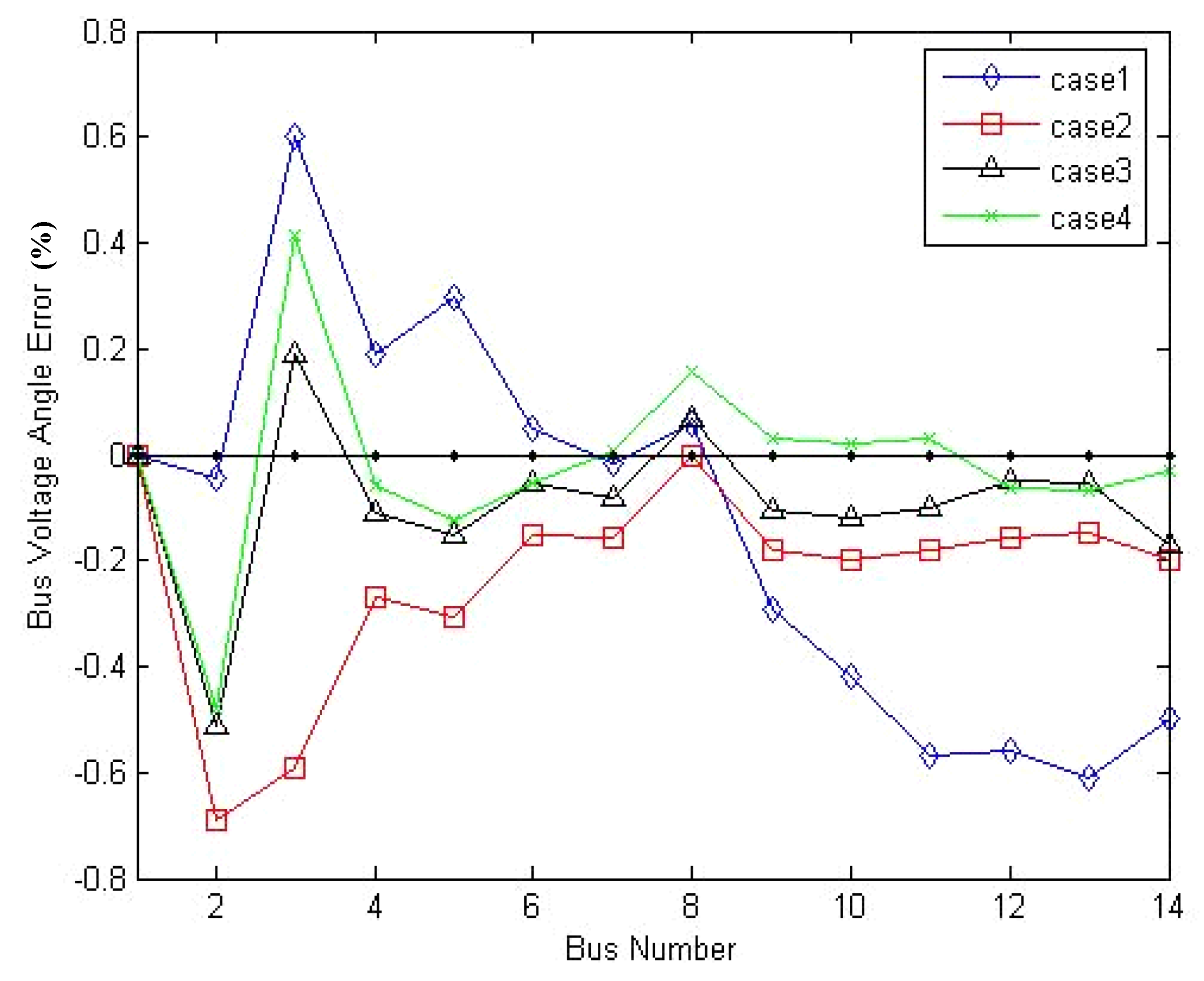
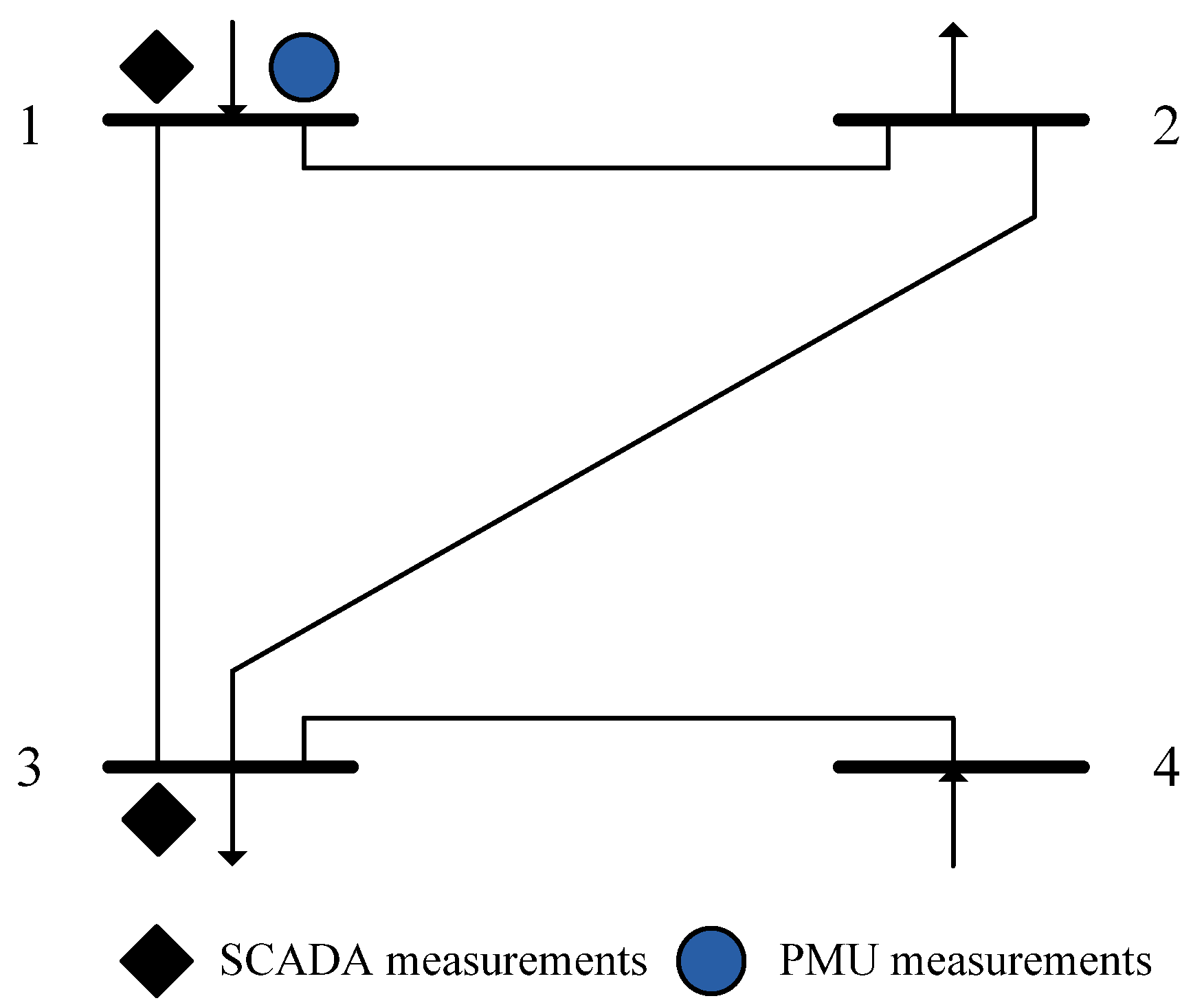
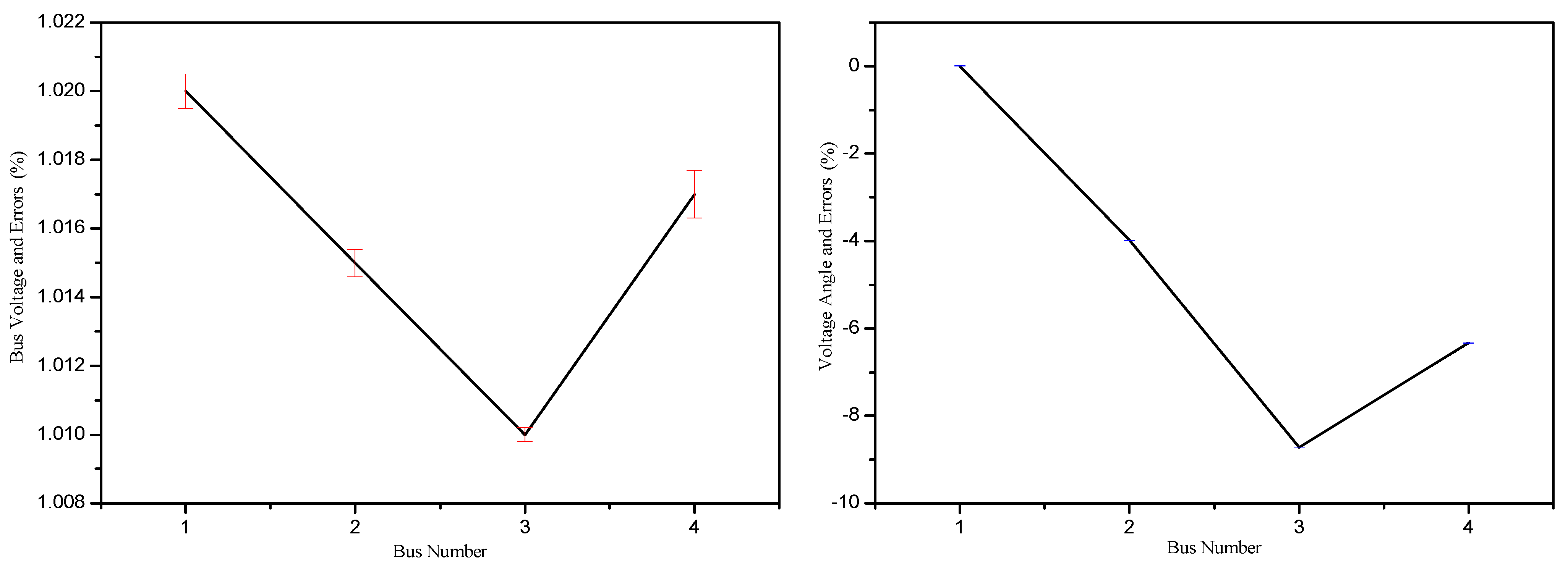
3.1. Computer Simulation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Measurement configuration | Number of measurements | Number of state | Redundancy |
|---|---|---|---|---|
| 1 | Only traditional measurements | 44 | 28 | 1.57 |
| 2 | Traditional measurements and PMUs in bus 2, 7, 9 | 50 | 28 | 1.78 |
| 3 | Traditional measurements and PMUs in bus 2, 6, 7, 9 | 50 | 28 | 1.78 |
| 4 | Traditional measurements and PMUs in bus 2, 6, 7, 9, 13 | 50 | 28 | 1.78 |
| Bus Voltage | True value | Bus voltage amplitude estimation of simulation cases | |||
|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | ||
| (p.u.) | 1.0600 | 1.05663 | 1.05755 | 1.0622 | 1.0605 |
| (p.u.) | 1.0450 | 1.0417 | 1.0425 | 1.0472 | 1.0455 |
| (p.u.) | 0.9996 | 0.9950 | 0.9967 | 1.0017 | 0.9997 |
| (p.u.) | 1.0016 | 0.9982 | 0.9992 | 1.0036 | 1.0020 |
| (p.u.) | 1.0081 | 1.0056 | 1.0057 | 1.0102 | 1.0085 |
| (p.u.) | 0.9805 | 0.9781 | 0.9784 | 0.9824 | 0.9809 |
| (p.u.) | 0.9907 | 0.9874 | 0.9885 | 0.9927 | 0.9912 |
| (p.u.) | 1.0207 | 1.0175 | 1.0184 | 1.0226 | 1.0211 |
| (p.u.) | 0.9678 | 0.9654 | 0.9655 | 0.9697 | 0.9683 |
| (p.u.) | 0.9619 | 0.9571 | 0.9597 | 0.9639 | 0.9624 |
| (p.u.) | 0.9674 | 0.9640 | 0.9651 | 0.9693 | 0.9678 |
| (p.u.) | 0.9644 | 0.9620 | 0.9624 | 0.9663 | 0.9648 |
| (p.u.) | 0.9594 | 0.9571 | 0.9574 | 0.9613 | 0.9598 |
| (p.u.) | 0.9444 | 0.9421 | 0.9423 | 0.9463 | 0.9450 |
| Angle of bus voltage | True value | Bus voltage angle estimation of simulation cases | |||
|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | ||
| 0.0000 | 0.0276 | 0.0077 | 0.0073 | 0.0252 | |
| −5.0125 | −5.0103 | −4.9779 | −4.9869 | −4.9886 | |
| −12.7398 | −12.8163 | −12.6647 | −12.7642 | −12.7926 | |
| −10.1673 | −10.1864 | −10.1399 | −10.1563 | −10.1612 | |
| −8.6505 | −8.6761 | −8.6238 | −8.6375 | −8.6397 | |
| −14.9247 | −14.9321 | −14.9019 | −14.9165 | −14.9167 | |
| −13.6736 | −13.6712 | −13.6519 | −13.6623 | −13.6743 | |
| −13.6636 | −13.6713 | −13.6630 | −13.6731 | −13.6847 | |
| −15.5817 | −15.5364 | −15.5535 | −15.5655 | −15.5862 | |
| −15.8072 | −15.7407 | −15.7757 | −15.7887 | −15.8105 | |
| −15.5225 | −15.4342 | −15.4944 | −15.5071 | −15.5275 | |
| −15.9298 | −15.8405 | −15.9049 | −15.9222 | −15.9195 | |
| −16.0145 | −15.9170 | −15.9912 | −16.0055 | −16.0033 | |
| −16.9687 | −16.8838 | −16.9349 | −16.9401 | −16.9634 | |


| Case No. | Bad data location | Noise |
|---|---|---|
| Case 2 | ||
| Case 3 | ||
| Case 4 | ||
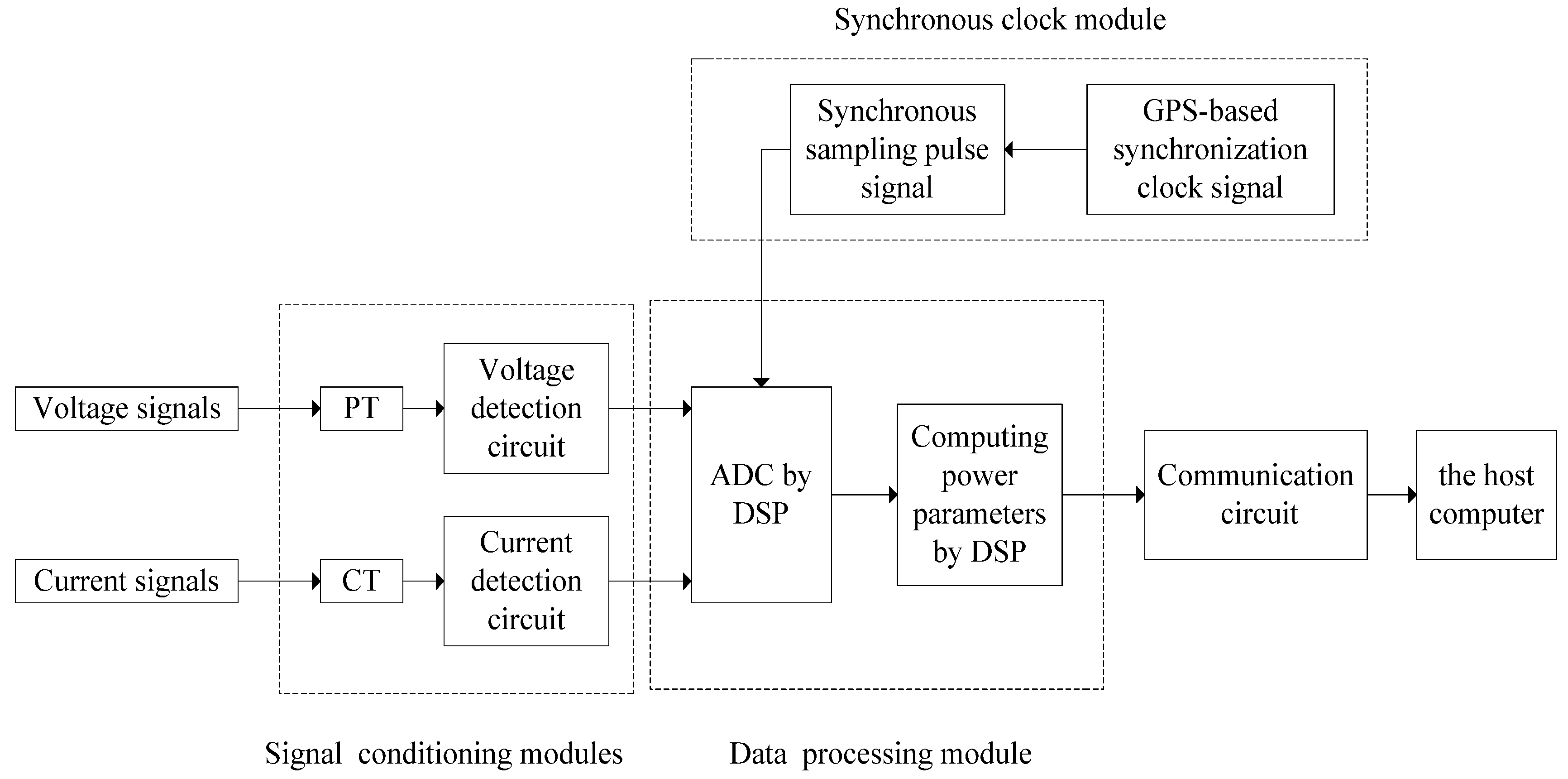
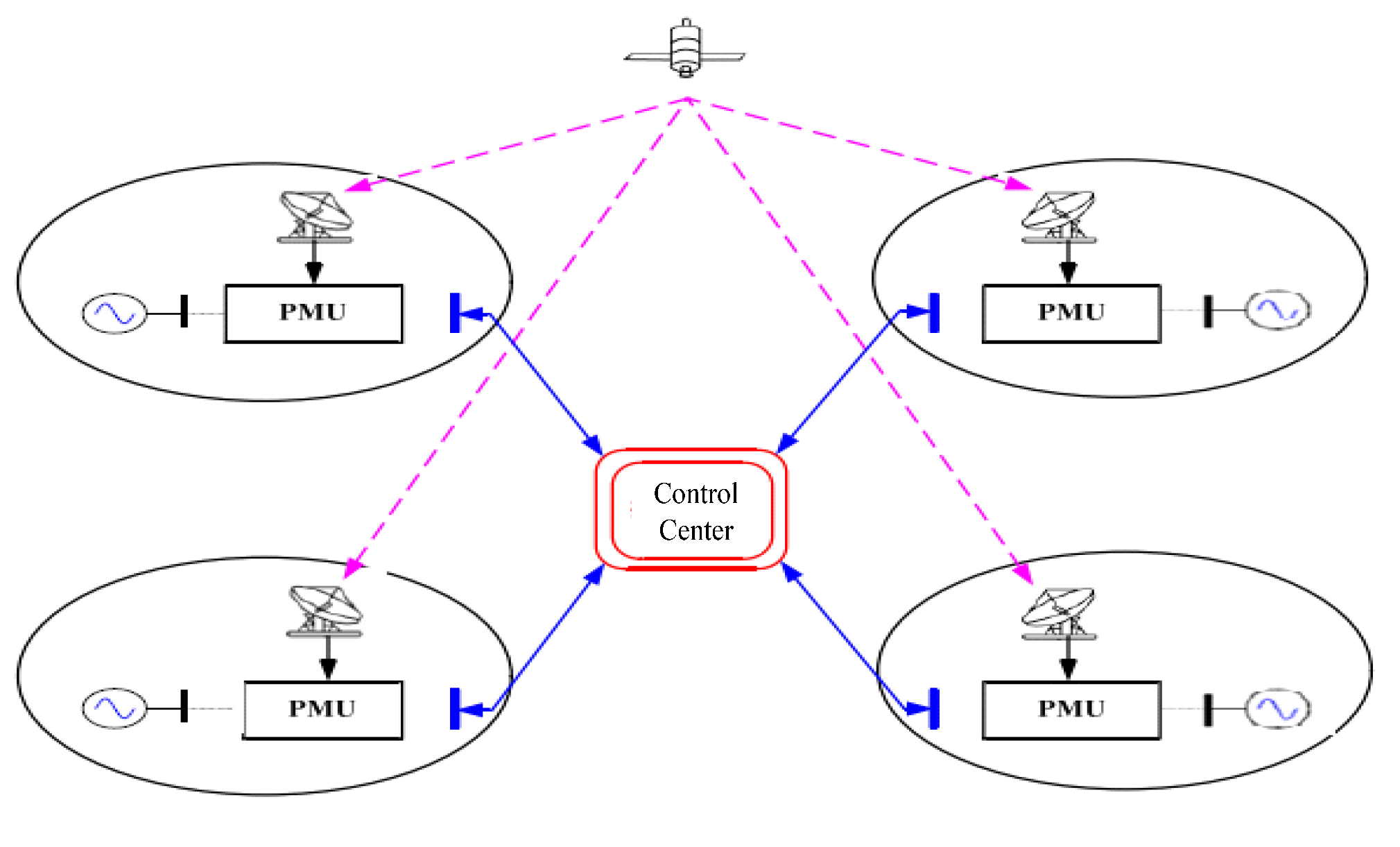
3.2. Hardware Application Experiments




4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Phadke, A.G.; Moraes, R.M. The wide world of wide-area measurement. IEEE Power Energy Mag. 2008, 6, 52–65. [Google Scholar] [CrossRef]
- Yu, K.C.; Watson, N.R.; Arrillaga, J. Error analysis in static harmonic state estimation: A statistical approach. IEEE Trans. Power Deliv. 2005, 20, 1045–1050. [Google Scholar] [CrossRef]
- Jiang, W.Q.; Vittal, V.; Heydt, G.T. A distributed state estimator utilizing synchronized phasor measurements. IEEE Trans. Power Syst. 2007, 22, 563–571. [Google Scholar] [CrossRef]
- Wang, B.; He, G.Y.; Liu, K.C. A new scheme for guaranteed state estimation of power system. IEEE Trans. Power Syst. 2013, 28, 4875–4876. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, W.C.; Zhang, B.M.; Sun, H.B. A fast solution for the lagrange multiplier-based electric power network parameter error identification model. Energies 2014, 7, 1288–1299. [Google Scholar] [CrossRef]
- Luque, J.; Gomez, I. The role of medium access control protocols in SCADA systems. IEEE Trans. Power Deliv. 1996, 11, 1195–1200. [Google Scholar] [CrossRef]
- Thomas, M.S.; Kumar, P.; Chandna, V.K. Design, development, and commissioning of a supervisory control and data acquisition (SCADA) laboratory for research and training. IEEE Trans. Power Syst. 2004, 19, 1582–1588. [Google Scholar] [CrossRef]
- Ree, D.L.; Centeno, V.C.; Thorp, J.S.; Phadke, A.G. Synchronized phasor measurement applications in power systems. IEEE Trans. Smart Grid. 2010, 1, 20–27. [Google Scholar] [CrossRef]
- Zhong, Z.; Xu, C.; Billian, B.J.; Zhang, L.; Tsai, S.J.; Conners, R.W.; Centeno, V.C.; Phadke, A.G.; Liu, Y. Power system frequency monitoring network (FNET) implementations. IEEE Trans. Power Syst. 2005, 20, 1914–1921. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-dependent stability analysis of the power system with a wide-area damping controller embedded. IEEE Trans. Power Syst. 2011, 26, 233–240. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Development of rule-based classifiers of rapid stability assessment of wide-area post-disturbances records. IEEE Trans. Power Syst. 2009, 24, 258–270. [Google Scholar] [CrossRef]
- Song, H.L.; Wu, J.Y.; Wu, K. A wide-area measurement systems-based adaptive strategy for controlled islanding in bulk power systems. Energies 2014, 4, 2631–2657. [Google Scholar] [CrossRef]
- Dobakhshari, A.S.; Ranjbar, A.M. A circuit approach to fault diagnosis in power systems by wide area measurement system. Int. Trans. Elect. Energy Syst. 2013, 63, 272–1288. [Google Scholar]
- Xu, W.; Wang, M.; Cai, J.; Tang, A. Sparse error correction from nonlinear measurements with applications in bad data detection for power networks. IEEE Trans. Sign. Proc. 2013, 61, 6175–6178. [Google Scholar] [CrossRef]
- Chen, J.; Abur, A. Placement of PMUs to enable bad data detection in state estimation. IEEE Trans. Power Syst. 2006, 21, 1608–1615. [Google Scholar] [CrossRef]
- Huang, Y.; Esmalifalak, M.; Nguyen, H.; Zheng, R.; Han, Z.; Li, H.; Song, L. Bad data injection in smart grid: attack and defense mechanisms. IEEE Comm. Mag. 2013, 51, 27–33. [Google Scholar] [CrossRef]
- Brameller, A.; Karaki, S.H. Power-system state estimation using linear programming. Proc. Inst. Electr. Eng. 1979, 126, 246–247. [Google Scholar] [CrossRef]
- Haughton, D.A.; Heydt, G.T. A linear state estimation formulation for smart distribution systems. IEEE Trans. Power Syst. 2013, 28, 1187–1195. [Google Scholar] [CrossRef]
- Yang, T.; Sun, H.; Bose, A. Transition to a two-level linear state estimator-part I: Architecture. IEEE Trans. Power Syst. 2011, 26, 46–53. [Google Scholar] [CrossRef]
- Yang, T.; Sun, H.; Bose, A. Transition to a two-level linear state estimator-part II: Algorithm. IEEE Trans. Power Syst. 2011, 26, 54–62. [Google Scholar] [CrossRef]
- Huang, C.H.; Lee, C.H.; Shih, K.R.; Wang, Y.J. Bad data analysis in power system measurement estimation using complex artificial neural network based on the extended complex Kalman filter. European Trans. Electr. Power. 2010, 20, 1082–1100. [Google Scholar] [CrossRef]
- Singh, D.; Pandey, J.P.; Chauhan, D.S. Topology identification, bad data processing, and state estimation using fuzzy pattern matching. IEEE Trans. Power Syst. 2005, 20, 1570–1579. [Google Scholar] [CrossRef]
- Zhang, J.H.; Welch, G.; Bishop, G.; Huang, Z.Y. A two-stage kalman filter approach for robust and real-time power system state estimation. IEEE Trans. Sust. Energy 2014, 2, 629–636. [Google Scholar] [CrossRef]
- Yu, K.C.; Watson, N.R. An approximate method for transient state estimation. IEEE Trans. Power Deliv. 2007, 22, 1680–1687. [Google Scholar] [CrossRef]
- Kundu, P.; Pradhan, A.K. Wide area measurement based protection support during power swing. Int. J. Electr. Power Energy Syst. 2014, 635, 546–554. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, T.; Chu, F.; Ling, C.; Nzongo, D.L.M. RETRACTED: A Robust WLS Power System State Estimation Method Integrating a Wide-Area Measurement System and SCADA Technology. Energies 2015, 8, 2769-2787. https://doi.org/10.3390/en8042769
Jin T, Chu F, Ling C, Nzongo DLM. RETRACTED: A Robust WLS Power System State Estimation Method Integrating a Wide-Area Measurement System and SCADA Technology. Energies. 2015; 8(4):2769-2787. https://doi.org/10.3390/en8042769
Chicago/Turabian StyleJin, Tao, Fuliang Chu, Cong Ling, and Daniel Legrand Mon Nzongo. 2015. "RETRACTED: A Robust WLS Power System State Estimation Method Integrating a Wide-Area Measurement System and SCADA Technology" Energies 8, no. 4: 2769-2787. https://doi.org/10.3390/en8042769