
State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter

Abstract
:1. Introduction
2. Experimental Setup

3. Battery Modeling and Parameters Identification
3.1. Battery Equivalent Circuit Model

3.2. State–Space Equations
3.3. Parameters Identification with Forgetting Factor Least-Squares Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Ro | Rp1 | Cp1 | Rp2 | Cp2 |
|---|---|---|---|---|---|
| Values | 0.0380 Ω | 0.0268 Ω | 1125 F | 0.0129 Ω | 20701 F |

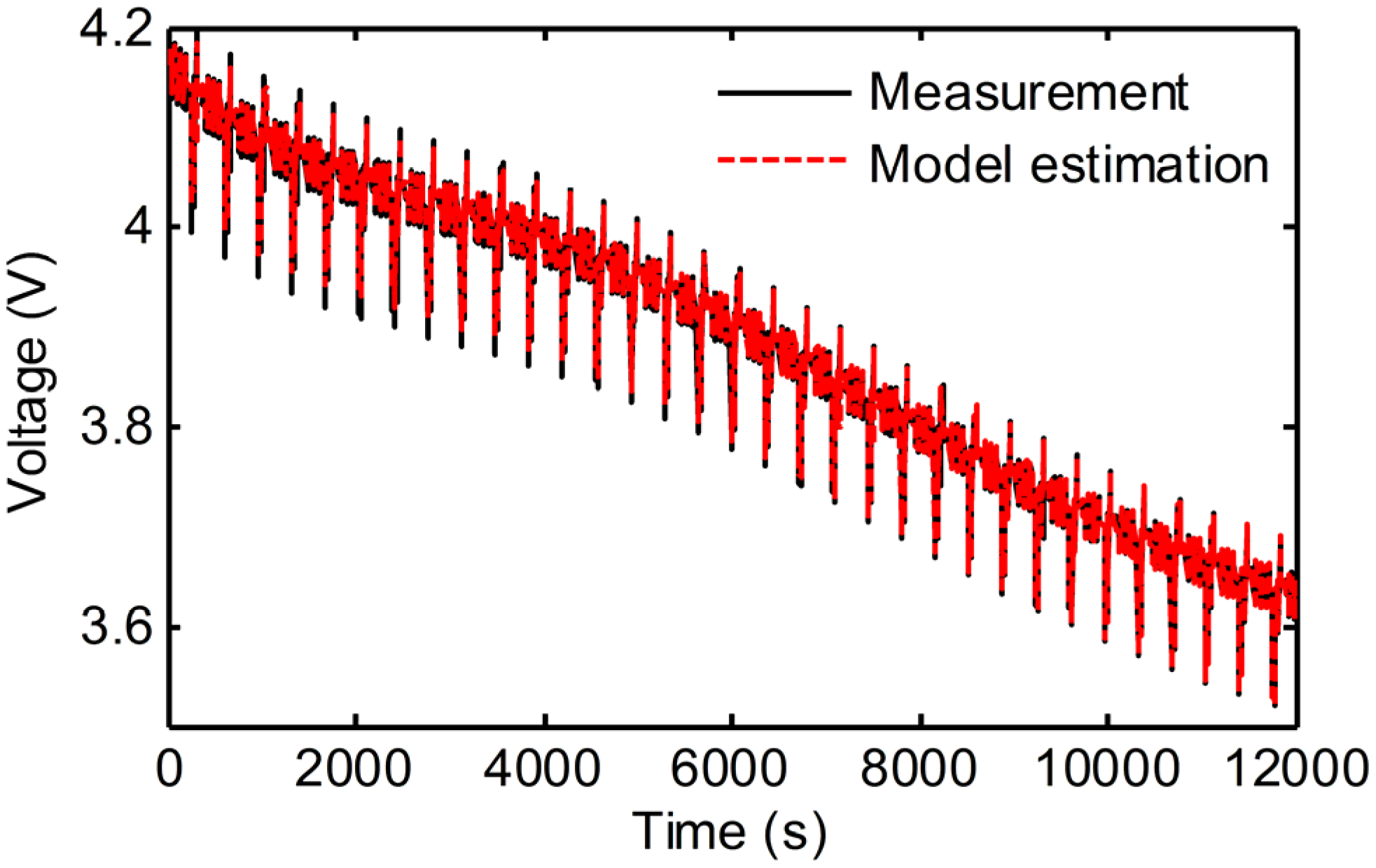
3.4. Model Validation

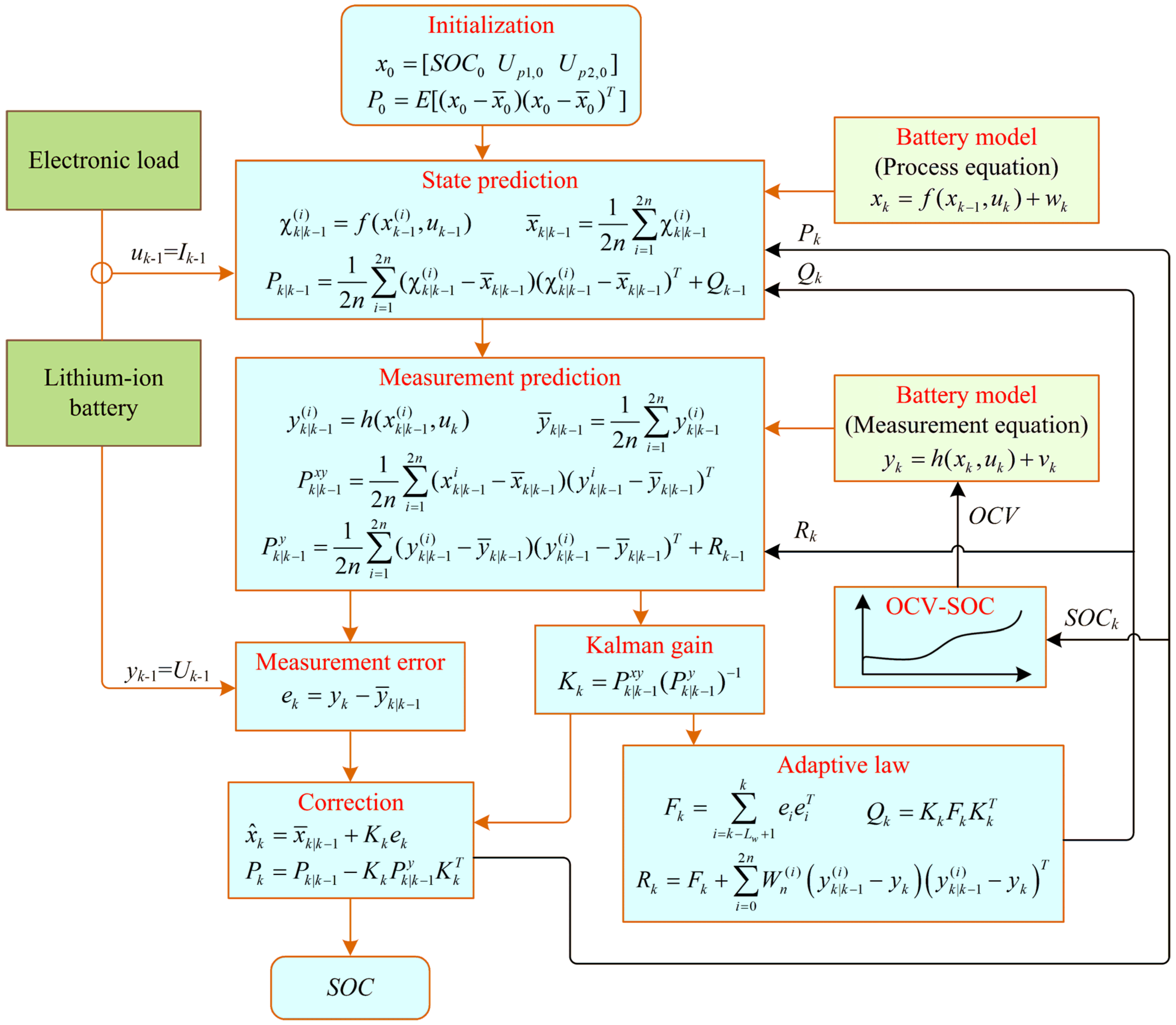
4. Adaptive Cubature Kalman Filter for SOC Estimation
- (i)
- Initialization
- Initial posteriori error covariance: P0;
- Initial process noise covariance: Q0;
- Initial measurement noise covariance: R0;
- Window size for covariance matching: Lw;
- Initial mean and covariance P0 with a random state vector x0 as follows
- (ii)
- Time update
- Factorize the error covariancewhere chol(∙) represents a Cholesky decomposition of a matrix returning a lower triangular Cholesky factor. That’s to say:
- Propagate the cubature points and calculate the predicted state
- Calculate the propagated covariancewhere Qk-1 is the process noise covariance matrix at time step k−1.
- (iii)
- Measurement update
- Factorize the error covariance
- Recalculate the cubature points
- Propagate the cubature points and calculate the predicted measurement
- Calculate the estimated covariancewhere Rk-1 is the measurement noise covariance matrix at time step k-1.
- Calculate the Kalman gain
- Update the predicted statewhere yk is the measured output at time step k.
- Update the error covariance
- (iv)
- Adjustment of Qk and Rk

5. Results and Discussion
5.1. Estimation Results without Measurement Noise


| Methods | Initial SOC | Execution time | DST | NEDC | ||||
|---|---|---|---|---|---|---|---|---|
| Maximum error | RMSE | Convergence rate | Maximum error | RMSE | Convergence rate | |||
| EKF | 100% | 0.76 s | 4.0% | 0.8% | 1 step | 4.3% | 0.7% | 1 step |
| 80% | 1.3% | 108 step | 1.2% | 105 step | ||||
| 70% | 1.8% | 205 step | 1.7% | 203 step | ||||
| 60% | 2.3% | 310 step | 2.2% | 270 step | ||||
| CKF | 100% | 1.36 s | 3.8% | 1.2% | 1 step | 3.8% | 1.2% | 1 step |
| 80% | 1.6% | 160 step | 1.6% | 155 step | ||||
| 70% | 2.0% | 350 step | 2.0% | 300 step | ||||
| 60% | 2.4% | 405 step | 2.4% | 390 step | ||||
| ACKF | 100% | 1.89 s | 3.8% | 0.6% | 1 step | 3.8% | 0.5% | 1 step |
| 80% | 1.2% | 88 step | 1.1% | 90 step | ||||
| 70% | 1.6% | 160 step | 1.5% | 155 step | ||||
| 60% | 2.1% | 255 step | 2.0% | 250 step | ||||

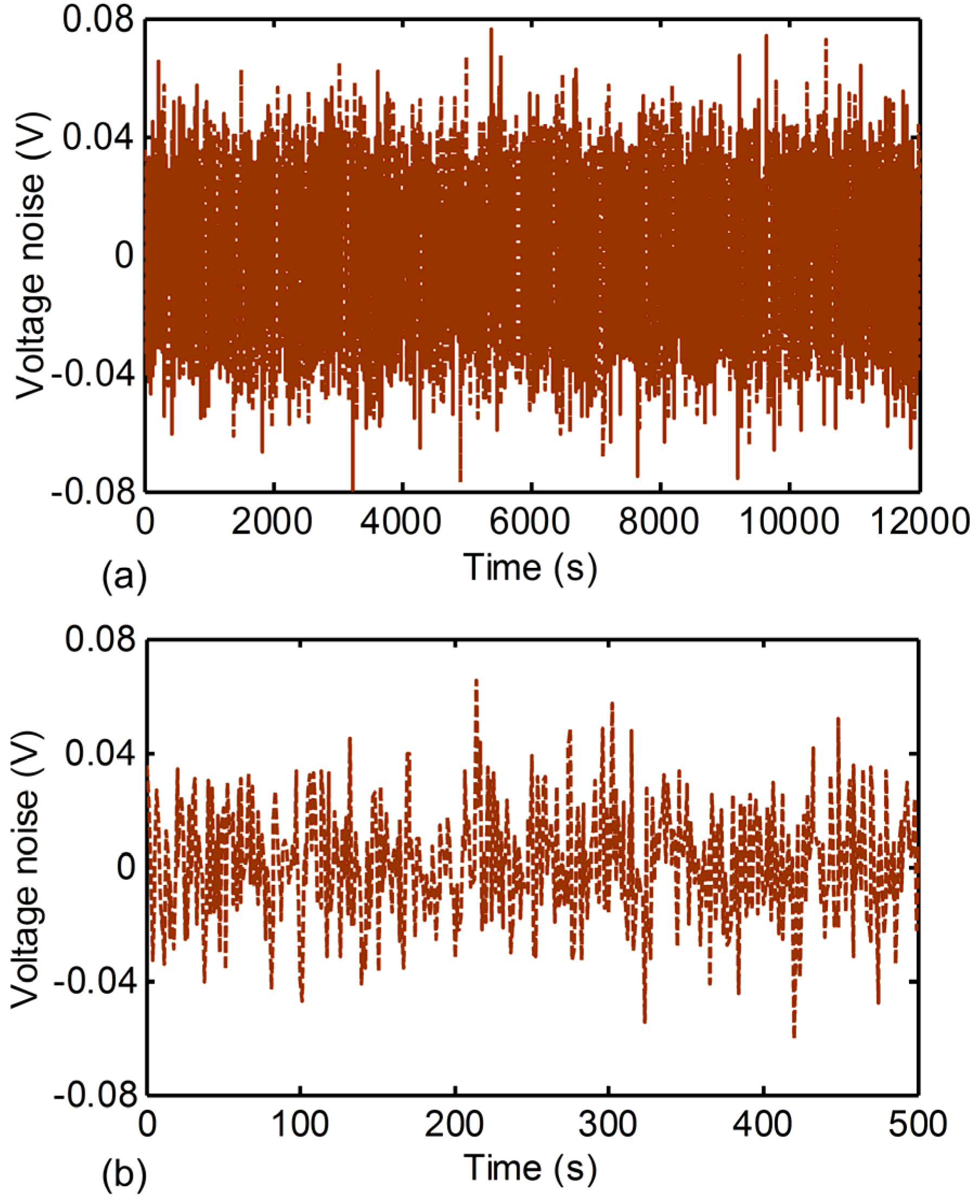
5.2. Estimation Results with Measurement Noise

| Methods | DST | NEDC | ||
|---|---|---|---|---|
| Maximum error | RMSE | Maximum error | RMSE | |
| EKF | 8.7% | 3.6% | 9.1% | 3.7% |
| CKF | 4.8% | 1.5% | 4.8% | 1.5% |
| ACKF | 4.3% | 0.5% | 4.3% | 0.4% |


6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Aylor, J.H.; Thieme, A.; Johnson, B.W. A battery state-of-charge indicator for electric wheelchairs. IEEE Trans. Ind. Electron. 1992, 39, 398–409. [Google Scholar] [CrossRef]
- Ng, K.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Xing, Y.J.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Feng, F.; Lu, R.G.; Wei, G.; Zhu, C.B. Online estimation of model parameters and state of charge of LiFePO4 batteries using a novel open-circuit voltage at various ambient temperatures. Energies 2015, 8, 2950–2976. [Google Scholar] [CrossRef]
- Do, D.V.; Forgez, C.; El Kadri Benkara, K.; Friedrich, G. Impedance observer for a Li-ion battery using Kalman filter. IEEE Trans. Veh. Technol 2009, 58, 3930–3937. [Google Scholar]
- Xu, J.; Mi, C.C.; Cao, B.G.; Cao, J.Y. A new method to estimate the state of charge of lithium-ion batteries based on the battery impedance model. J. Power Sources 2013, 233, 277–284. [Google Scholar] [CrossRef]
- Shen, Y.Q. Adaptive online state-of-charge determination based on neuro-controller and neural network. Energy Convers. Manag. 2010, 51, 1093–1098. [Google Scholar] [CrossRef]
- Cheng, B.; Bai, Z.F.; Gao, B.G. State of charge estimation based on evolutionary neural network. Energy Convers. Manag. 2008, 49, 2788–2794. [Google Scholar]
- Charkhgard, M.; Farrokhi, M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Dai, H.F.; Guo, P.J.; Wei, X.Z.; Sun, Z.C.; Wang, J.Y. ANFIS (adaptive neuro-fuzzy inference system) based online SOC (State of Charge) correction considering cell divergence for the EV (electric vehicle) traction batteries. Energy 2015, 80, 350–360. [Google Scholar] [CrossRef]
- Salkind, A.J.; Fennie, C.; Singh, P.; Atwater, T.; Reisne, D.E. Determination of state-of-charge and state-of-health of batteries by fuzzy logic methodology. J. Power Sources 1999, 80, 293–300. [Google Scholar] [CrossRef]
- Singh, P.; Vinjamuri, R.R.; Wang, X.Q.; Reisner, D. Design and implementation of a fuzzy logic-based state-of-charge meter for li-ion batteries used in portable defibrillators. J. Power Sources 2006, 162, 829–836. [Google Scholar] [CrossRef]
- Cuma, M.U.; Koroglu, T. A comprehensive review on estimation strategies used in hybrid and battery electric vehicles. Renew. Sustain. Energy Rev. 2015, 42, 517–531. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Lee, J.; Nam, O.; Cho, B.H. Li-ion battery SOC estimation method based on the reduced order extended Kalman filtering. J. Power Sources 2007, 174, 9–15. [Google Scholar] [CrossRef]
- Yuan, S.F.; Wu, H.J.; Yin, C.L. State of charge estimation using the extended Kalman filter for battery management systems based on the ARX battery model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Dai, H.F.; Wei, X.Z.; Sun, Z.C.; Wang, J.Y.; Gu, W.J. Online cell SOC estimation of Li-ion battery packs using a dual time-scale Kalman filtering for EV applications. Appl. Energy 2012, 95, 227–237. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- Xiong, B.Y.; Zhao, J.Y.; Wei, Z.B.; Skyllas-Kazacos, M. Extended kalman filter method for state of charge estimation of vanadium redox flow battery using thermal-dependent electrical model. J. Power Sources 2014, 262, 50–61. [Google Scholar] [CrossRef]
- Sepasi, S.; Roose, L.R.; Matsuura, M.M. Extended kalman filter with a fuzzy method for accurate battery pack state of charge estimation. Energies 2015, 8, 5217–5233. [Google Scholar] [CrossRef]
- Xiong, R.; Gong, X.Z.; Mi, C.C.; Sun, F.C. A robust state-of-charge estimator for multiple types of lithium-ion batteries using adaptive extended Kalman filter. J. Power Sources 2013, 243, 805–816. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. A novel on-board state-of-charge estimation method for aged Li-ion batteries based on model adaptive extended Kalman filter. J. Power Sources 2014, 245, 337–344. [Google Scholar] [CrossRef]
- He, H.W.; Xiong, R.; Zhang, X.W.; Sun, F.C.; Fan, J.X. State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved Thevenin model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Zhang, C.; Li, K.; Pei, L.; Zhu, C.B. An integrated approach for real-time model-based state-of-charge estimation of lithium-ion batteries. J. Power Sources 2015, 283, 24–36. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, J.H. Discrete wavelet transform-based denoising technique for advanced state-of-charge estimator of a lithium-ion battery in electric vehicles. Energy 2015, 83, 462–473. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1: Introduction and state estimation. J. Power Sources 2006, 161, 1356–1368. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2: simultaneous state and parameter estimation. J. Power Sources 2006, 161, 1369–1384. [Google Scholar] [CrossRef]
- Sun, F.C.; Hu, X.S.; Zou, Y.; Li, S.G. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- He, Z.W.; Gao, M.Y.; Wang, C.S.; Wang, L.Y.; Liu, Y.Y. Adaptive state of charge estimation for Li-ion batteries based on an unscented Kalman filter with an enhanced battery model. Energies 2013, 6, 4134–4151. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.C.; Pecht, M. State of charge estimation for electric vehicle batteries using unscented Kalman filtering. Microelectron. Reliab. 2013, 53, 840–847. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, B.Z.; Sun, W.; Xu, Z.H.; Zheng, W.W. A modified model based state of charge estimation of power lithium-ion batteries using unscented Kalman filter. J. Power Sources 2014, 270, 619–626. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G.J. An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of Lithium-ion batteries for autonomous mobile robots. IEEE Trans. Control. Syst. Technol. 2015, 23, 357–363. [Google Scholar] [CrossRef]
- Li, D.; Ouyang, J.; Li, H.Q.; Wan, J.F. State of charge estimation for LiMn2O4 power based on strong tracking sigma point Kalman filter. J. Power Sources 2015, 279, 439–449. [Google Scholar] [CrossRef]
- He, H.W.; Qin, H.Z.; Sun, X.K.; Shui, Y.P. Comparison study on the battery SoC estimation with EKF and UKF algorithms. Energies 2013, 6, 5088–5100. [Google Scholar] [CrossRef]
- Li, J.H.; Barillas, J.K.; Guenther, C.; Danzer, M.A. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles. J. Power Sources 2013, 230, 244–250. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman smoothers. Automatica 2011, 47, 2245–2250. [Google Scholar] [CrossRef]
- Li, W.; Jia, Y. Location of mobile station with maneuvers using an IMM-based cubature Kalman filter. IEEE Trans. Ind. Electron. 2012, 59, 4338–4348. [Google Scholar] [CrossRef]
- Dahmahi, M.; Meche, A.; Keche, M.; Oramri, A. Reduced cubature Kalman filtering applied to target tracking. In Proceedings of the 2nd International Conference on Control, Instrumentation and Automation (ICCIA’11), Shiraz, Iran, 27–29 December 2011; pp. 1097–1101.
- Tang, X.J.; Liu, Z.B.; Zhang, J.S. Square-root quaternion cubature Kalman filtering for spacecraft attitude estimation. Acta Astronautica 2012, 76, 84–94. [Google Scholar] [CrossRef]
- Guo, R.; Shi, P.F.; Cheng, X.Q.; Ma, Y.L.; Tan, Z. Effect of Ag additive on the performance of LiNi1/3Co1/3Mn1/3O2 cathode material for lithium ion battery. J Power Sources 2009, 189, 2–8. [Google Scholar] [CrossRef]
- Mousavi, G.S.M.; Nikdel, M. Various battery models for various simulation studies and applications. Renew. Sustain. Energy Rev. 2014, 32, 477–485. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, B.Z.; Wang, M.W.; Sun, W.; Xu, Z.H. Comparison study on two model-based adaptive algorithms for SOC estimation of lithium-ion batteries in electric vehicles. Energies 2014, 7, 8446–8464. [Google Scholar] [CrossRef]
- Hu, X.S.; Li, S.B.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Tian, Y.; Chen, C.R.; Xia, B.Z.; Sun, W.; Xu, Z.H.; Zheng, W.W. An adaptive gain nonlinear observer for state of charge estimation of lithium-ion batteries in electric vehicles. Energies 2014, 7, 5995–6012. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Feng, D.; Chen, T.W. Performance bounds of forgetting factor least-squares algorithms for time-varying systems with finite measurement data. IEEE Trans. Circuits Syst. Regul. Pap. 2005, 52, 555–566. [Google Scholar] [CrossRef]
- Pathuri Bhuvana, V.; Unterrieder, C.; Huemer, M. Battery internal state estimation: A comparative study of non-linear state estimation algorithms. In Proceedings of the 9th IEEE Vehicle Power and Propulsion Conference (IEEE VPPC’13), Beijing, China, 15−18 October 2013; pp. 65–70.
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, B.; Wang, H.; Tian, Y.; Wang, M.; Sun, W.; Xu, Z. State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter. Energies 2015, 8, 5916-5936. https://doi.org/10.3390/en8065916
Xia B, Wang H, Tian Y, Wang M, Sun W, Xu Z. State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter. Energies. 2015; 8(6):5916-5936. https://doi.org/10.3390/en8065916
Chicago/Turabian StyleXia, Bizhong, Haiqing Wang, Yong Tian, Mingwang Wang, Wei Sun, and Zhihui Xu. 2015. "State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter" Energies 8, no. 6: 5916-5936. https://doi.org/10.3390/en8065916