
Novel Segmentation Technique for Measured Three-Phase Voltage Dips

 ,
,  , and
, and 
Abstract
:1. Introduction
2. Methodology
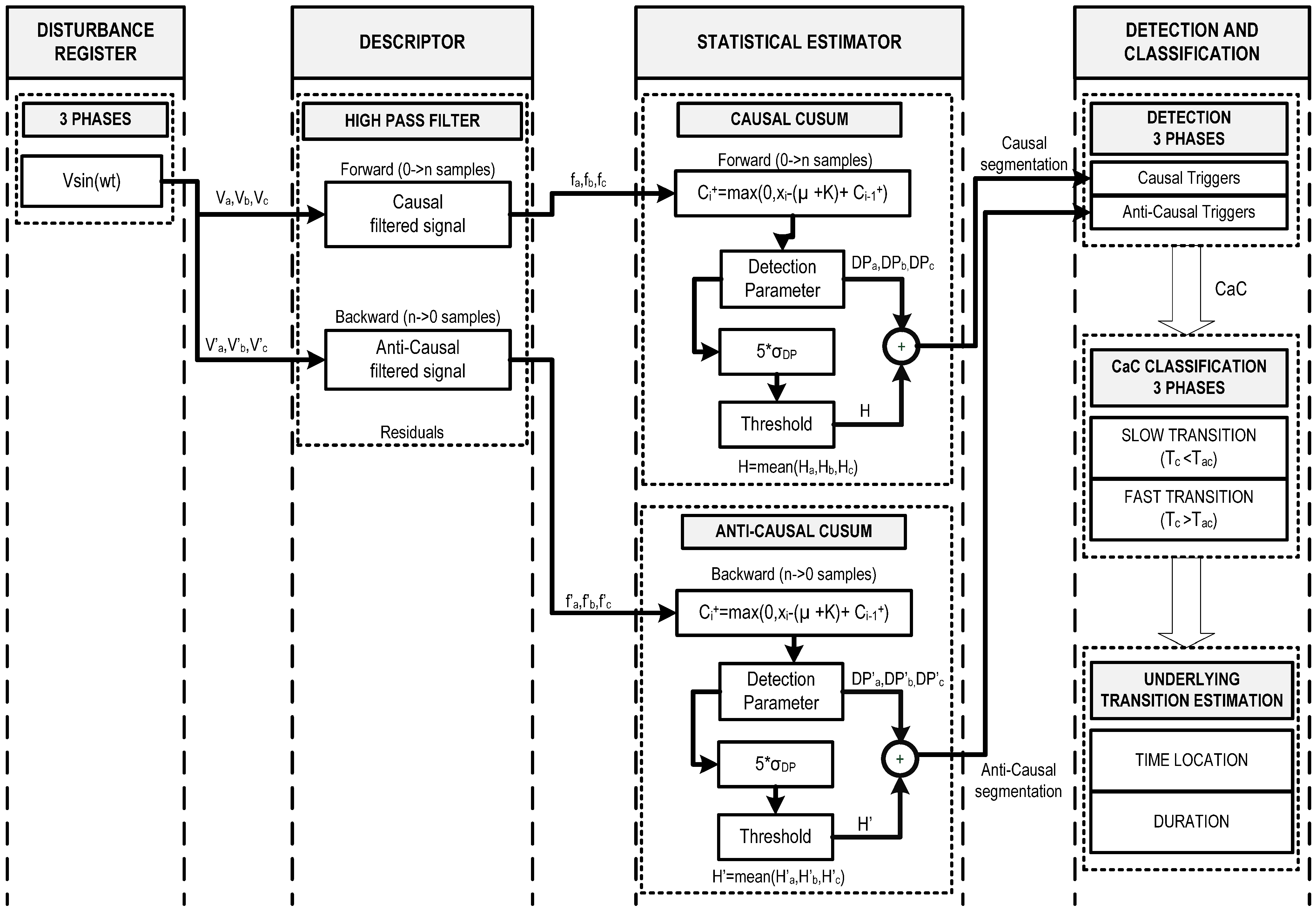
2.1. Detection Algorithm
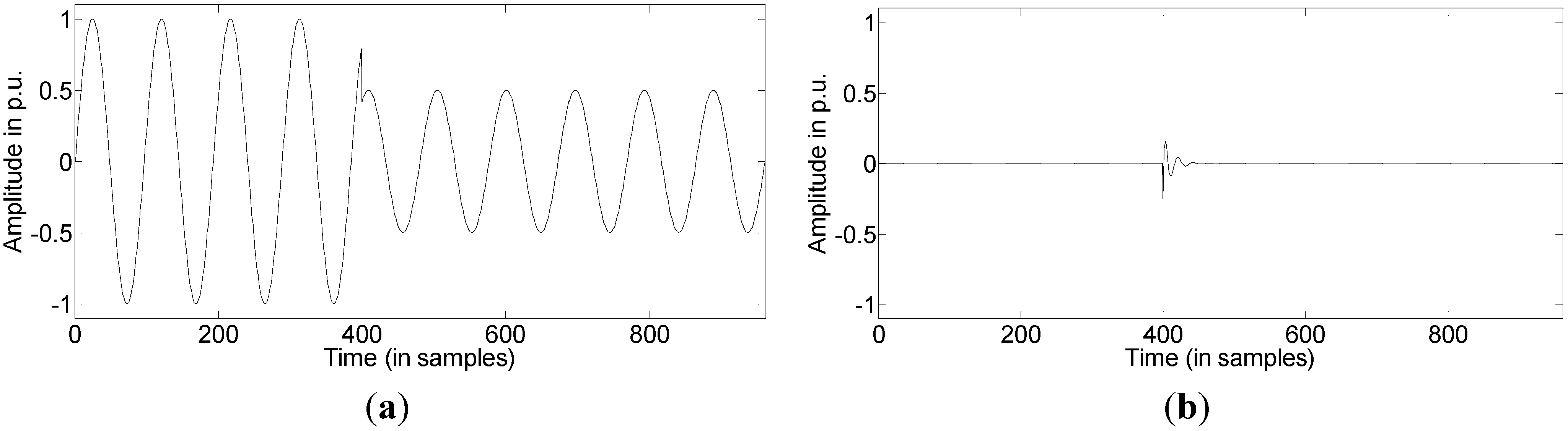
2.1.1. Signal Modelling Based on Filtering

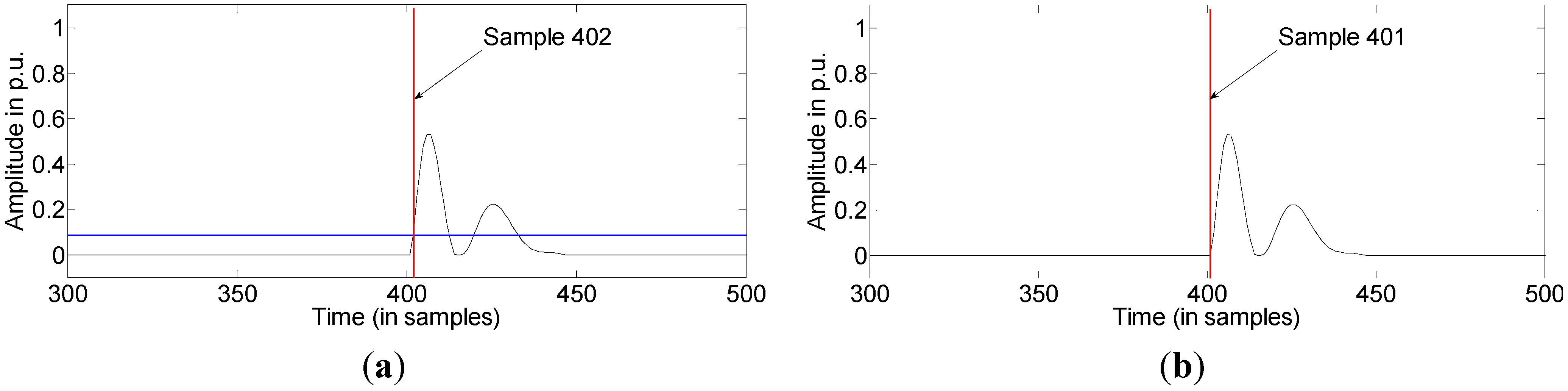
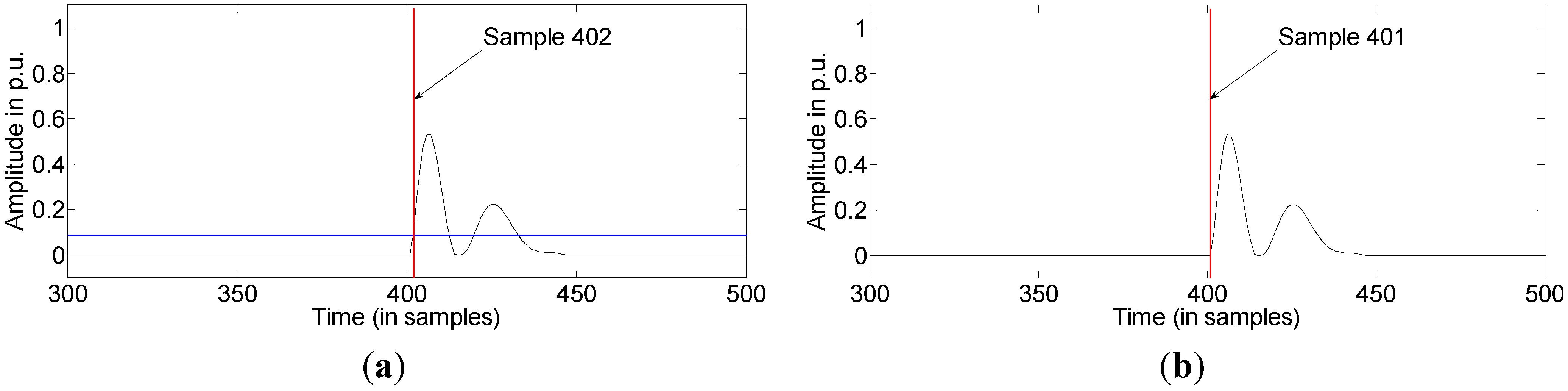
2.1.2. Detection Parameter Algorithm Based on Cumulative Sum Theory
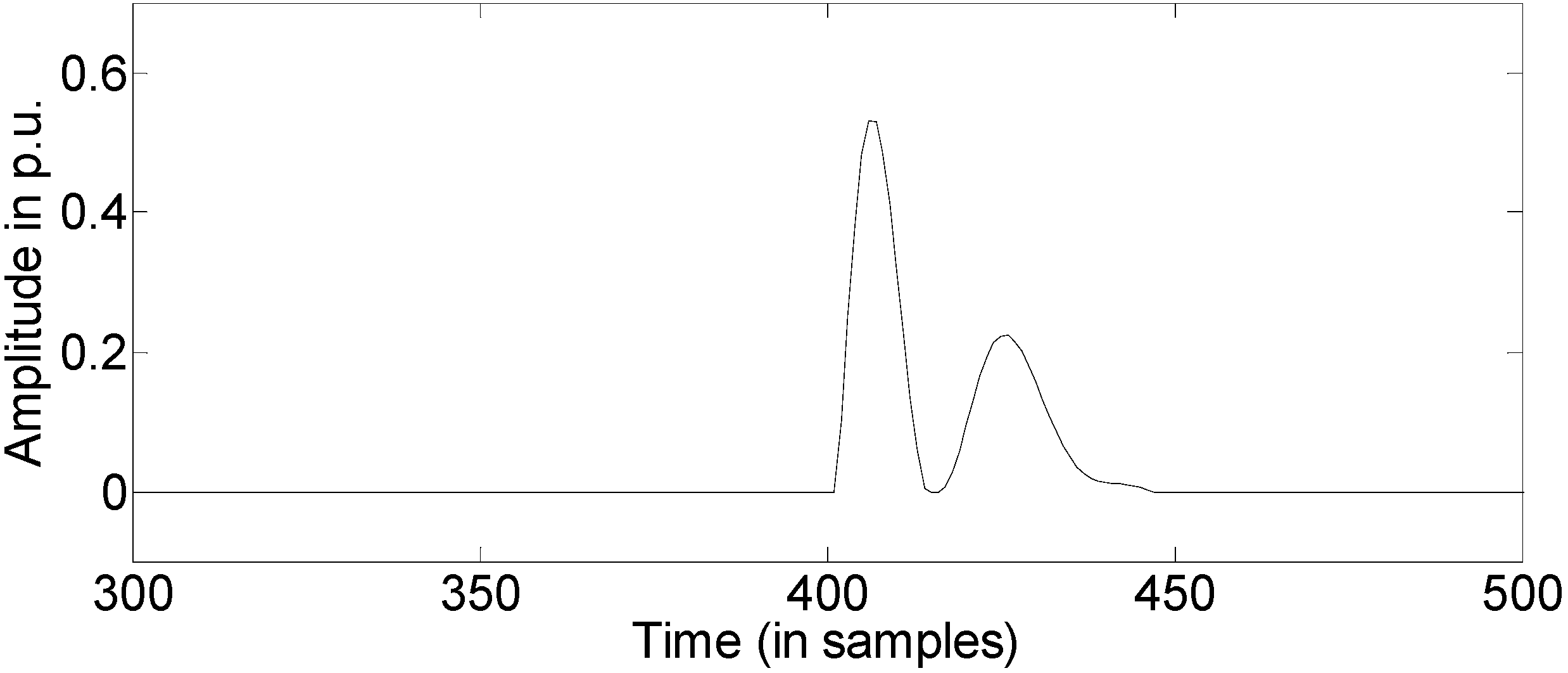
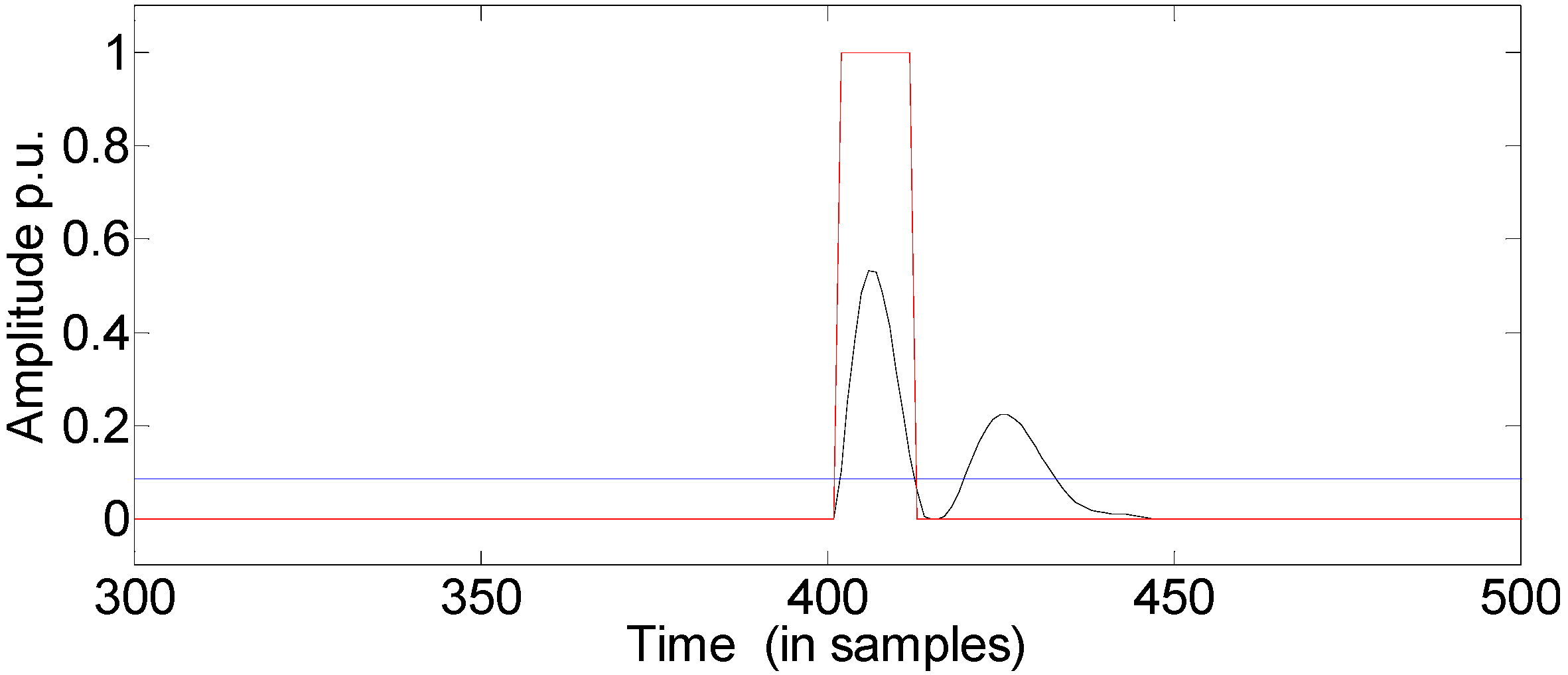
2.1.3. Decision-Making



2.2. Segmentation Algorithm

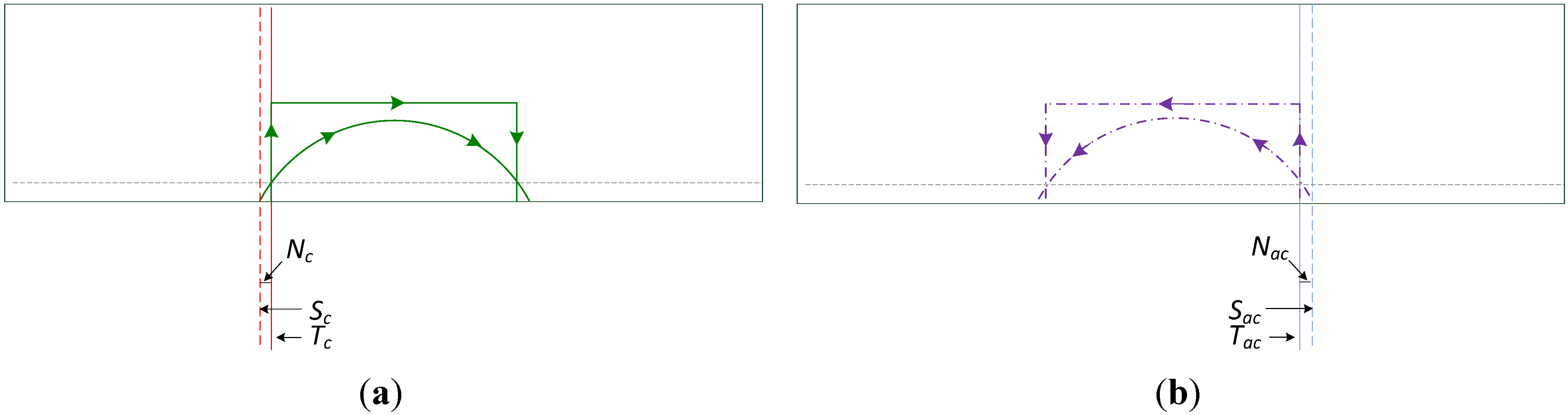
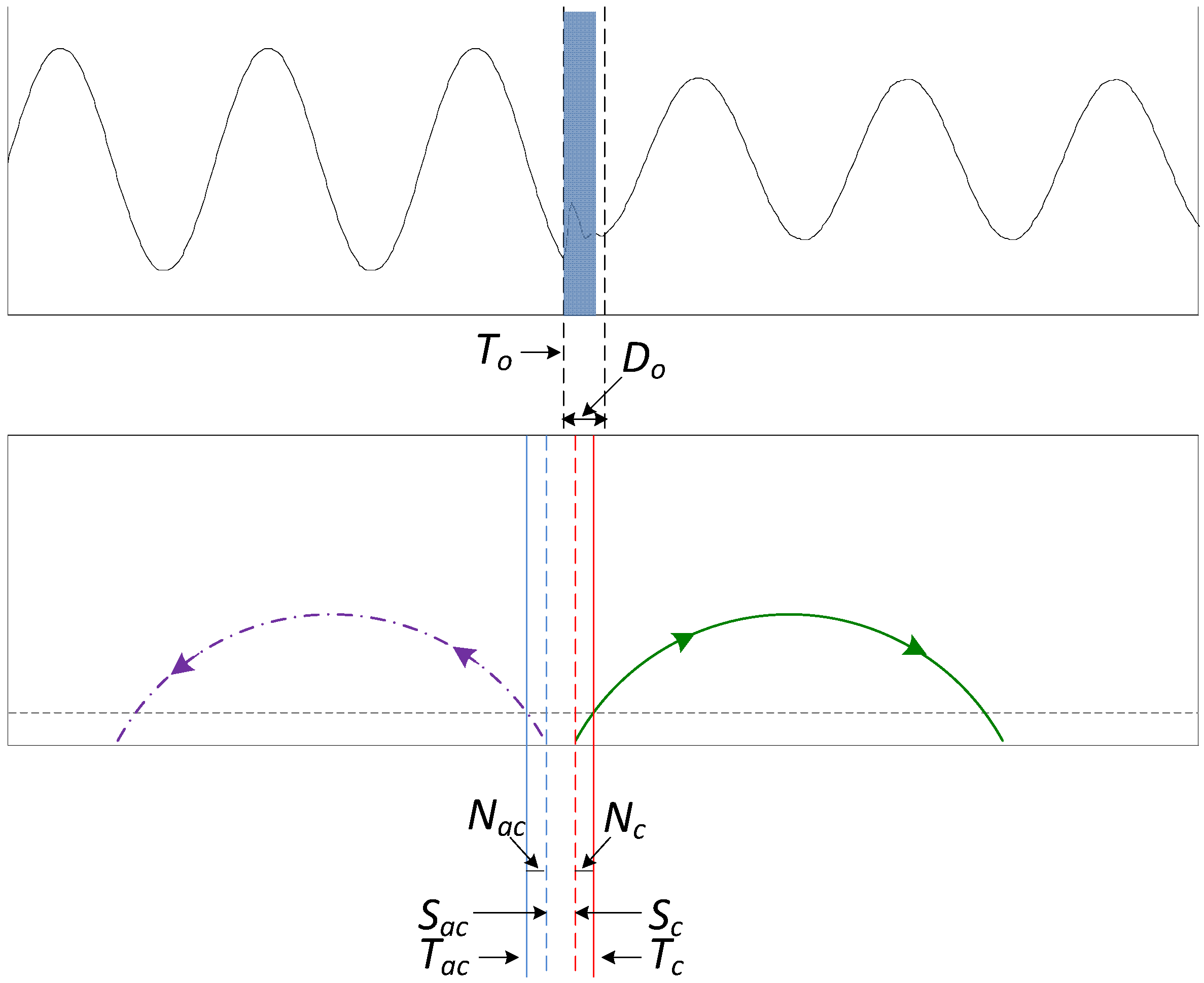
2.2.1. Causal and Anti-Causal Method

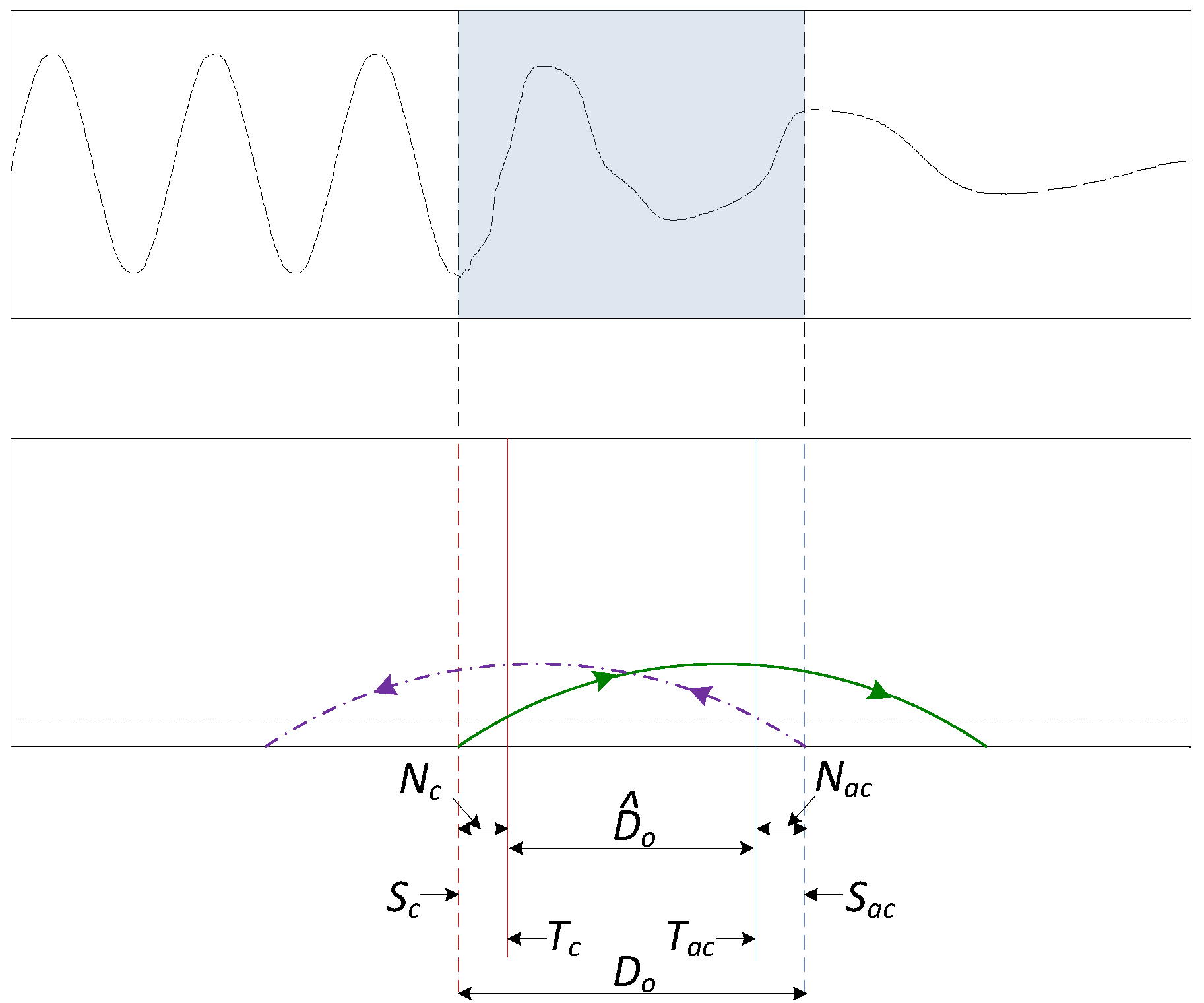
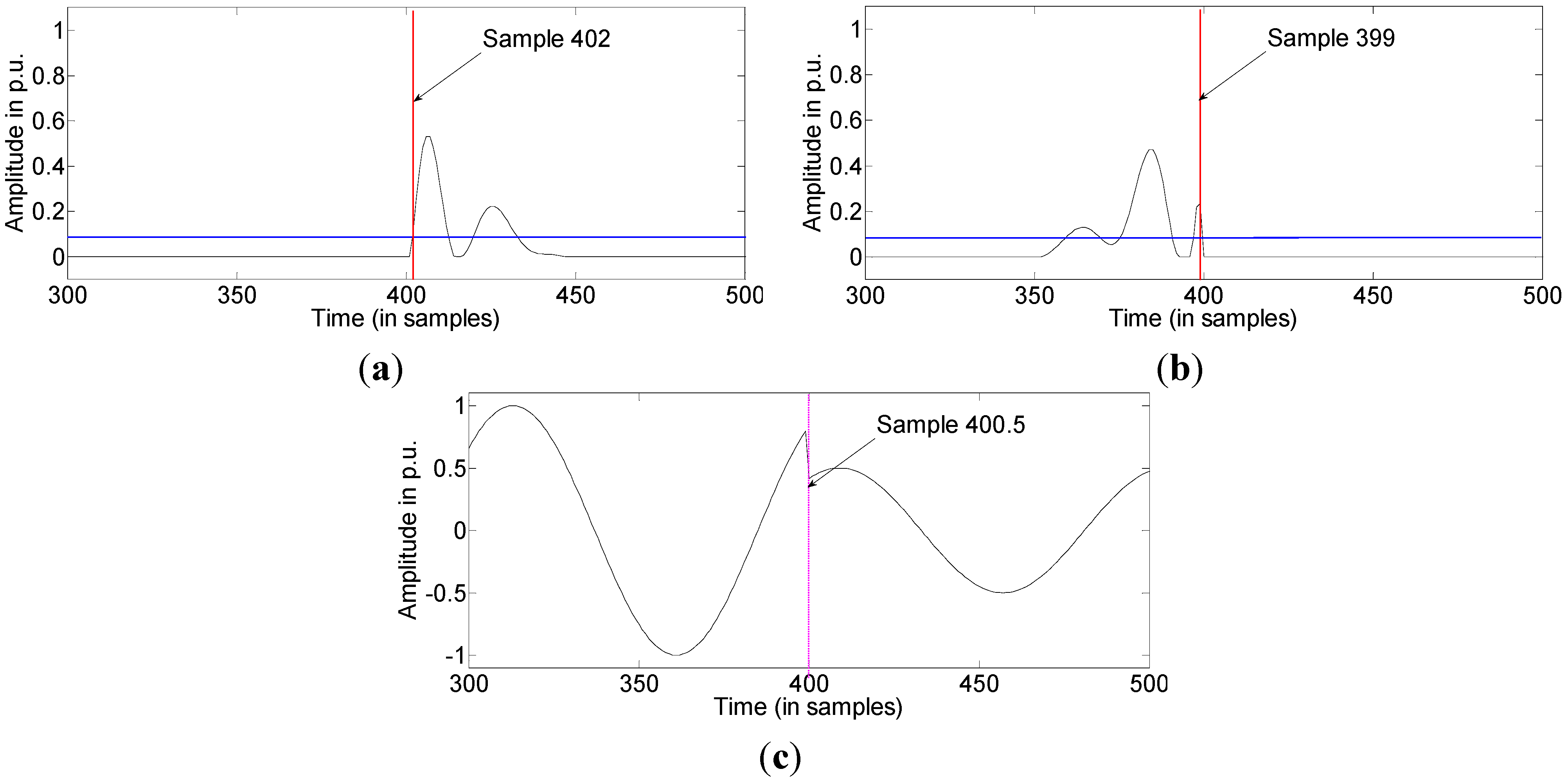
2.2.2. Estimation of the Signal Transitions Based on Causal and Anti-Causal Method



2.3. Methodology of Proposed Method for Fast Detection and Segmentation of Three-Phase Dips

3. Results and Discussion
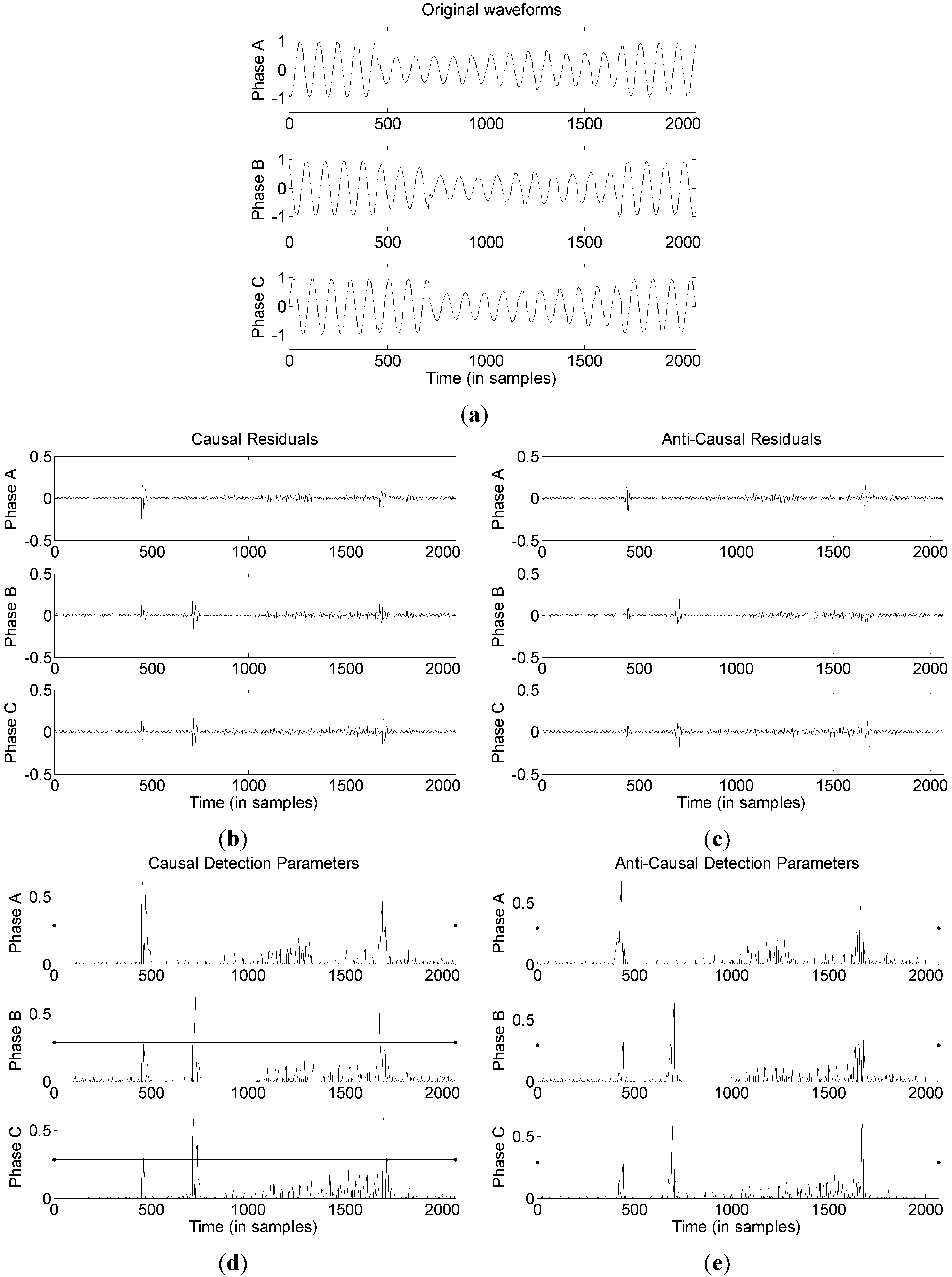
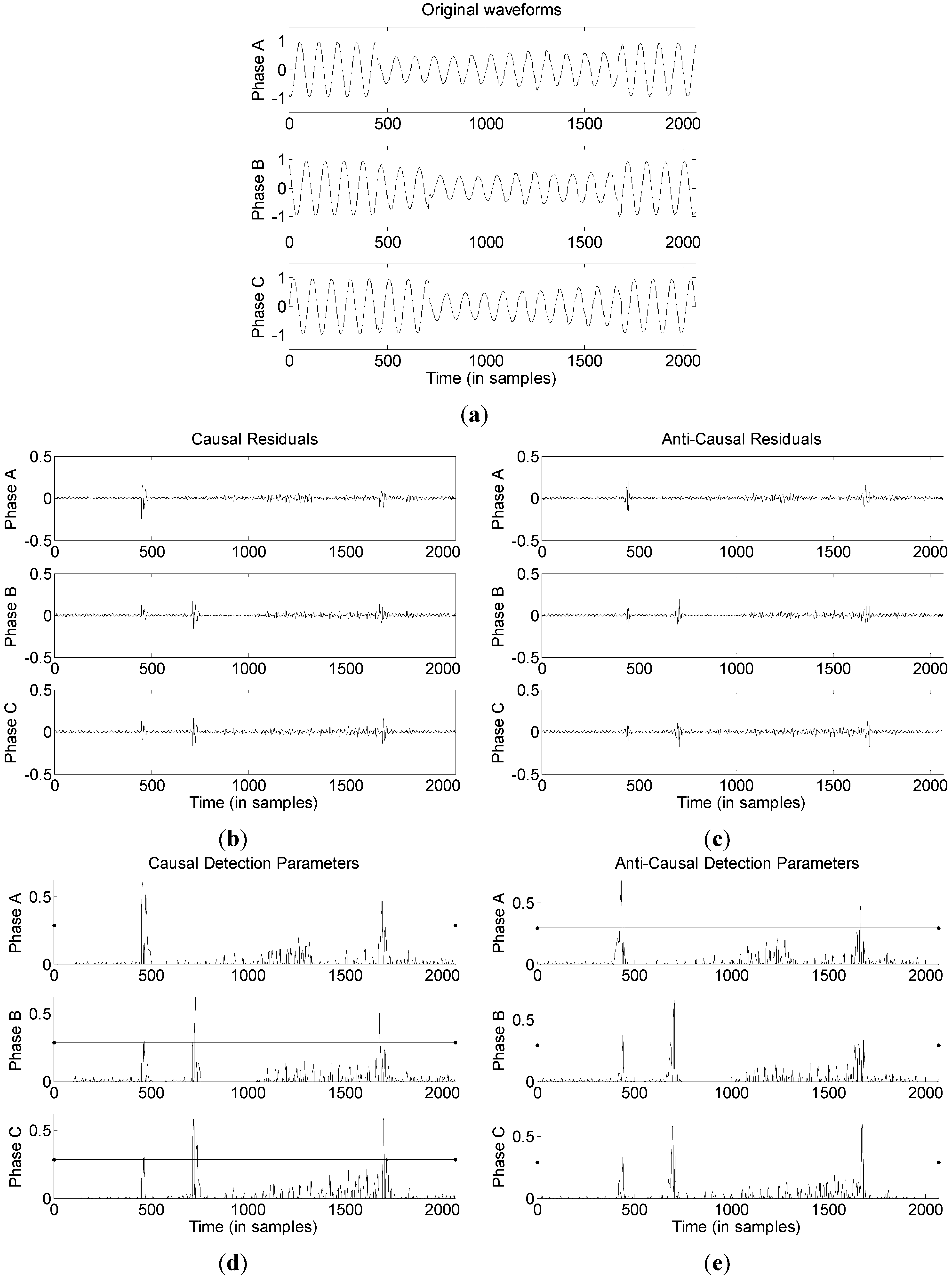
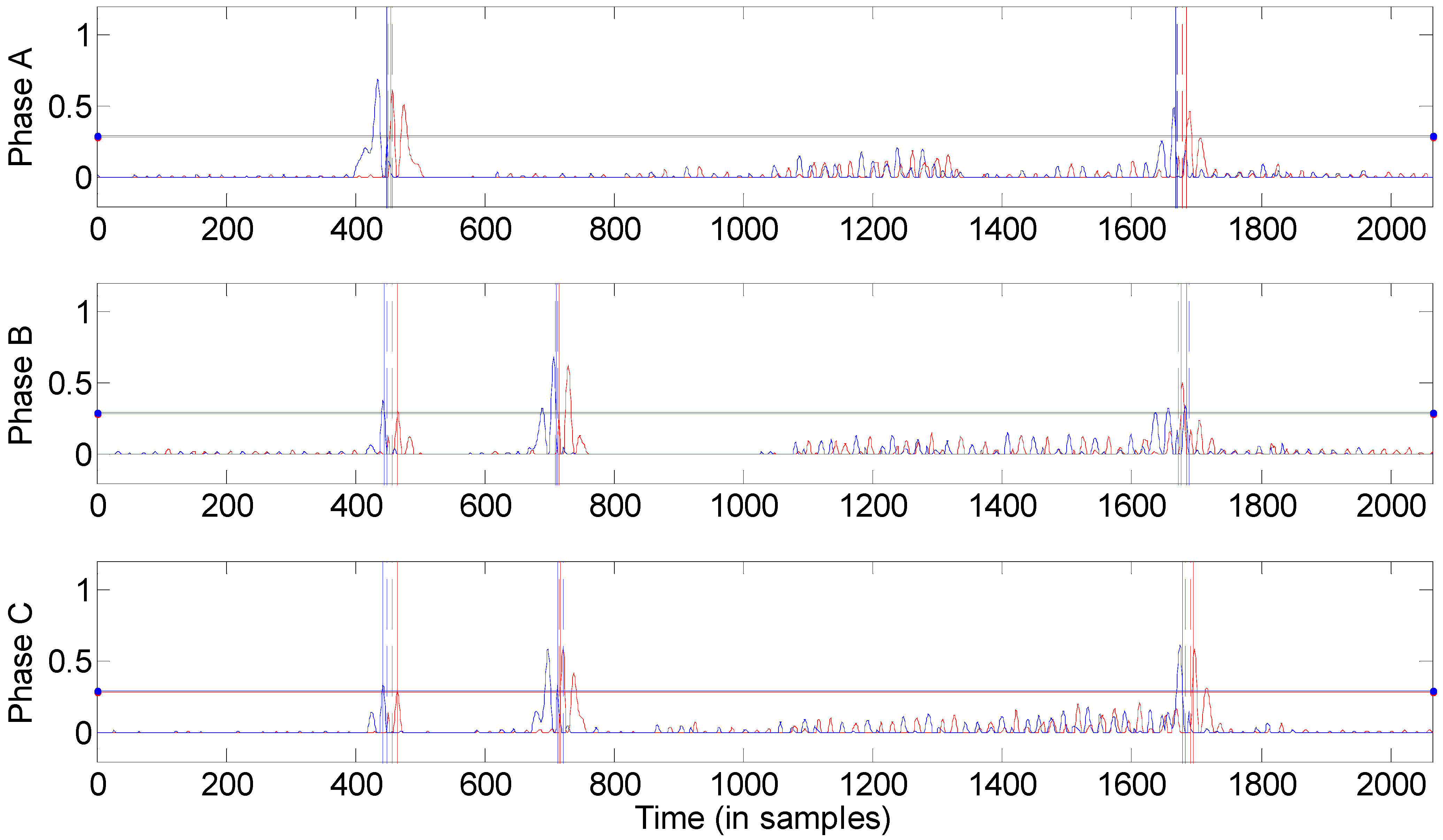
3.1. Segmentation Using Causal and Anti-Causal Methods

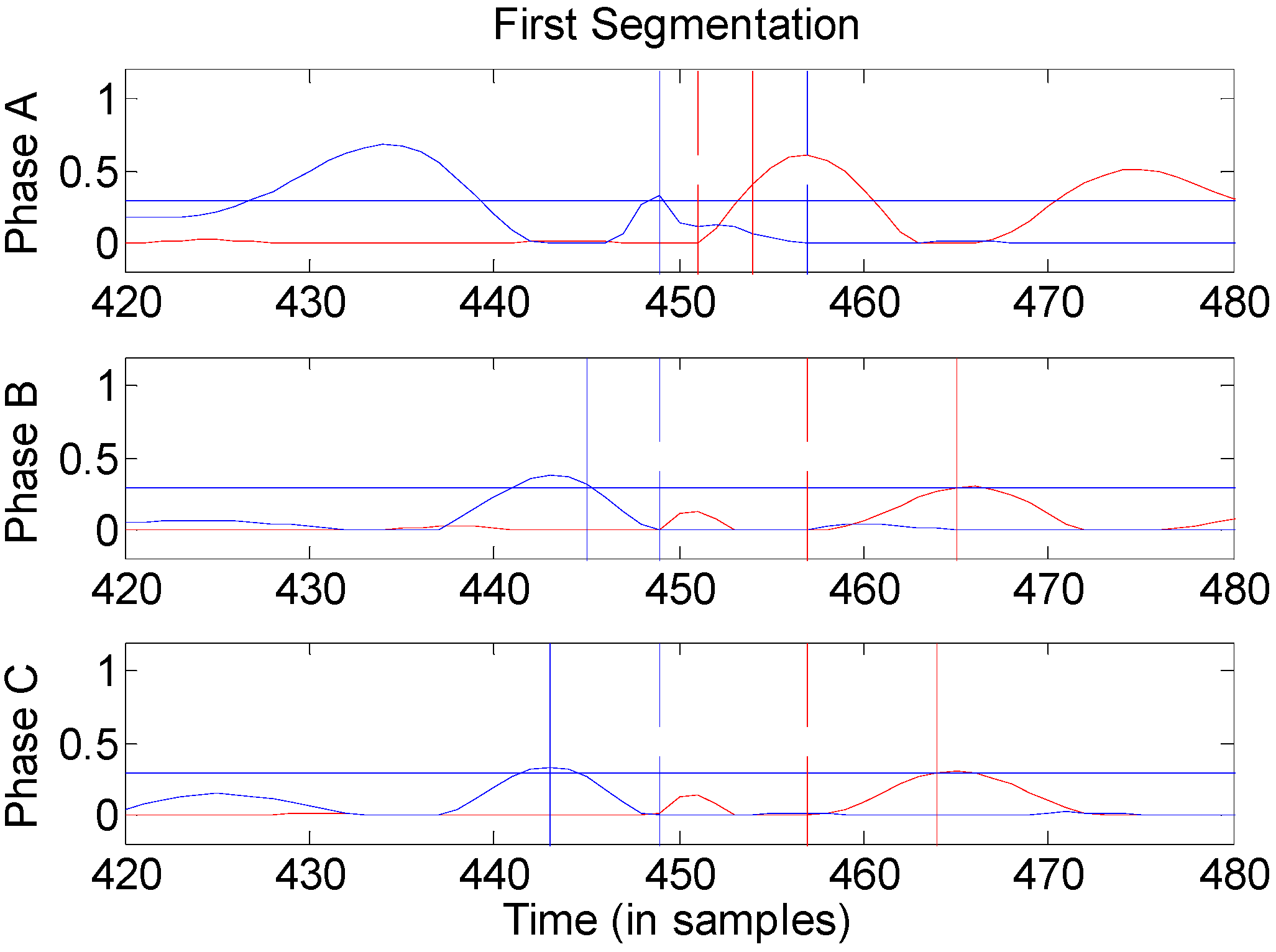
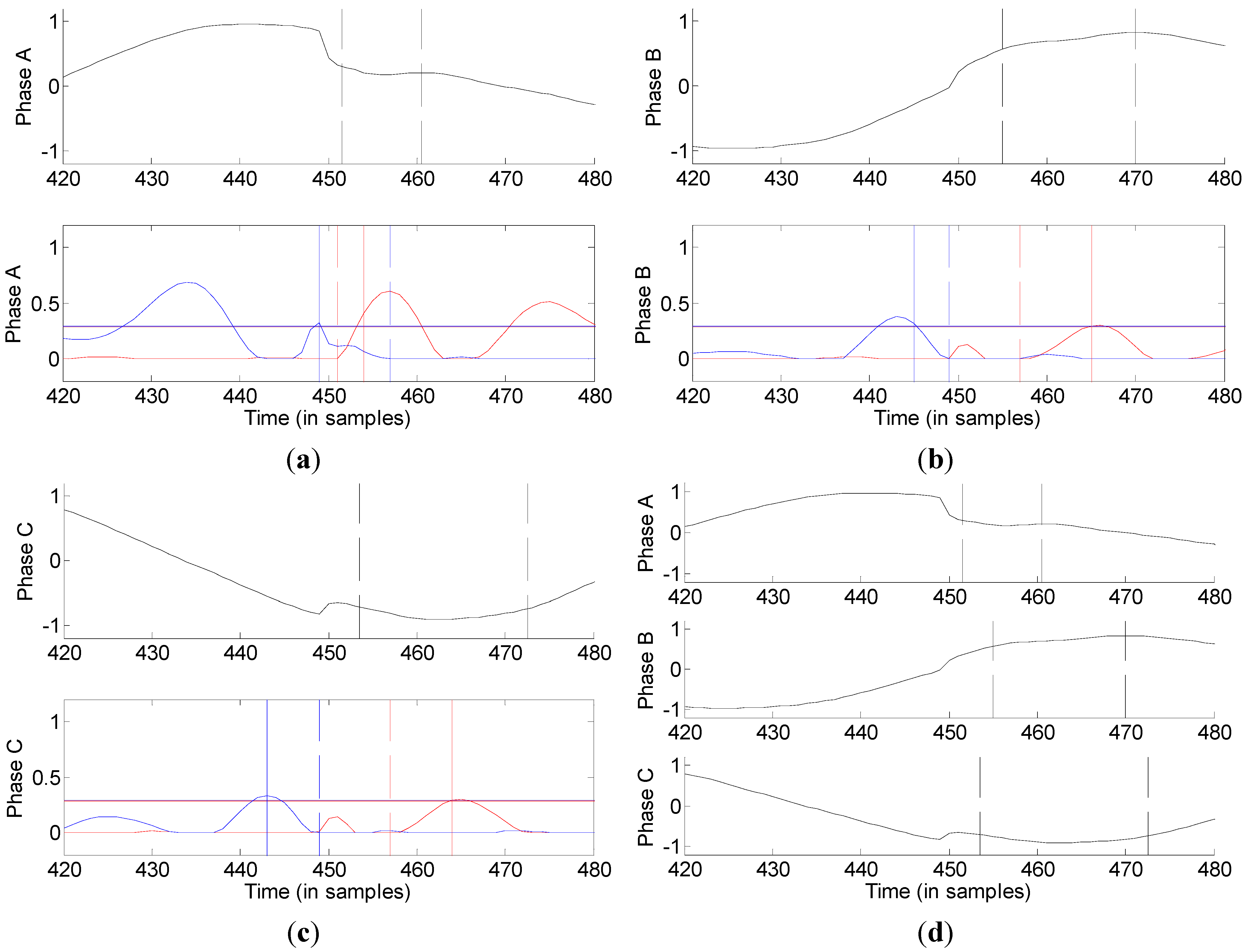
3.1.1. First Transition


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | Tc (sample) | Tac (sample) | Nc (sample) | Nac (sample) | Sc (sample) | Sac (sample) |
|---|---|---|---|---|---|---|
| A | 454 | 449 | 3 | 7 | 451 | 457 |
| B | 465 | 445 | 8 | 3 | 457 | 449 |
| C | 464 | 443 | 7 | 5 | 457 | 449 |
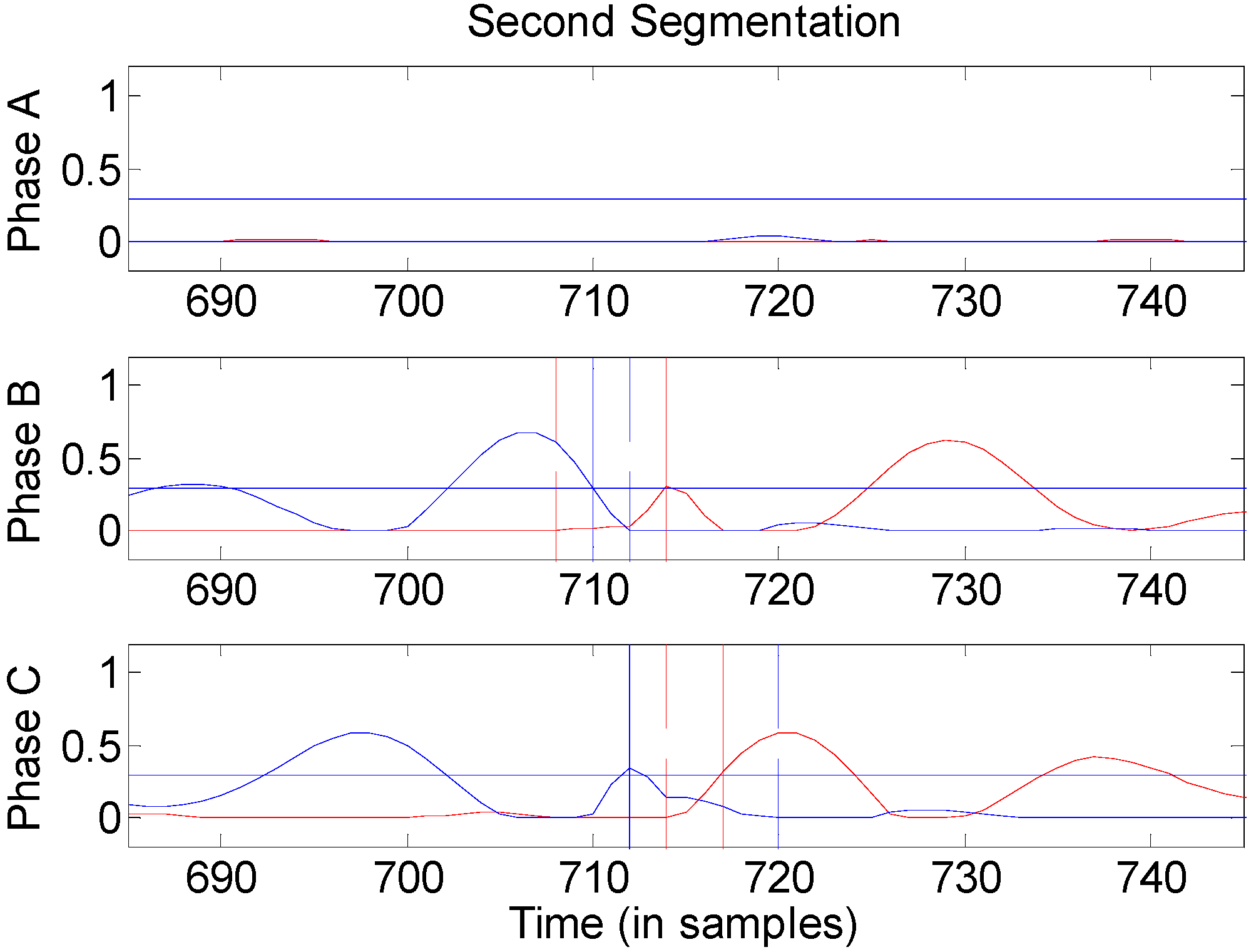
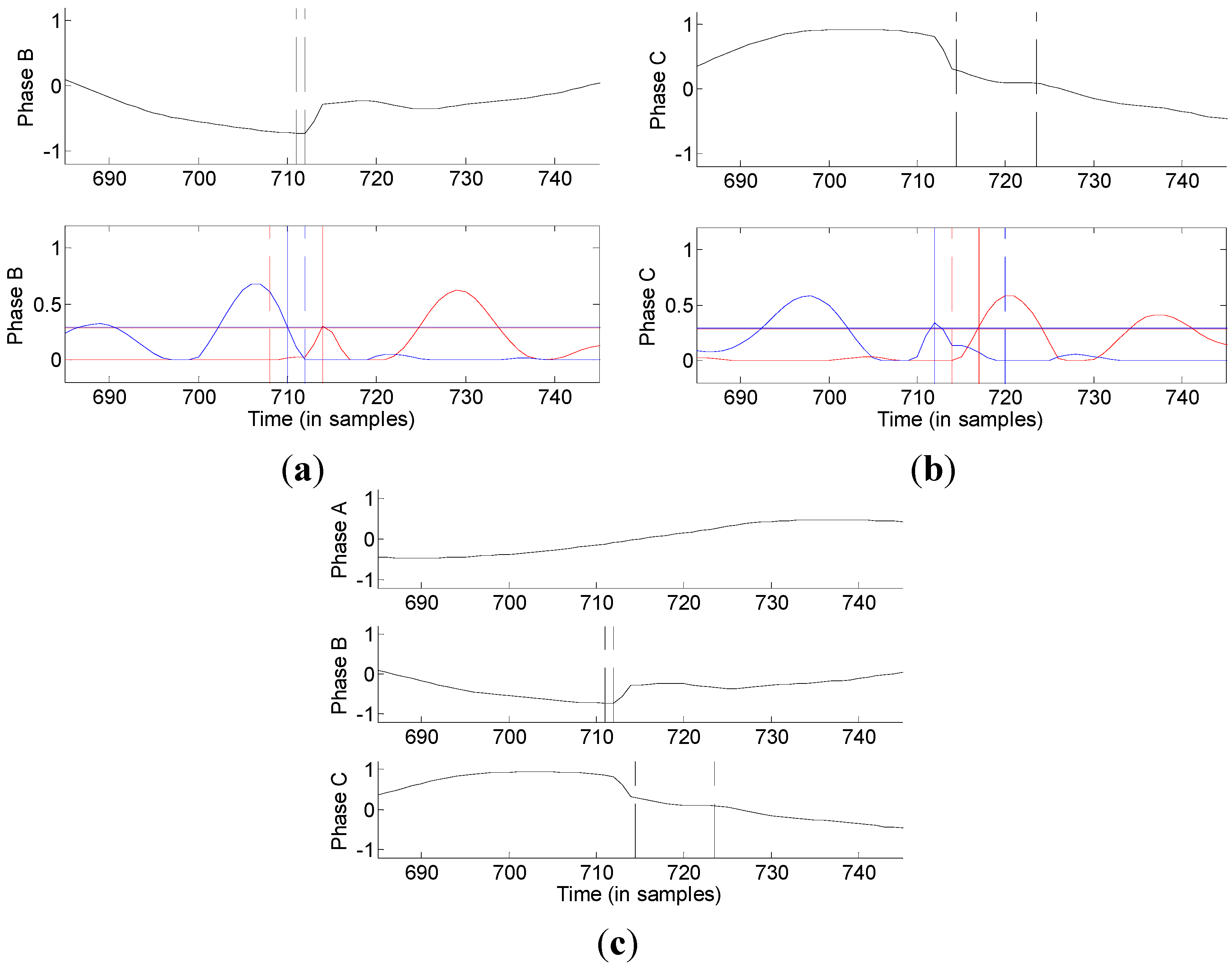
3.1.2. Second Transition

| Phase | Tc (sample) | Tac (sample) | Nc (sample) | Nac (sample) | Sc (sample) | Sac (sample) |
|---|---|---|---|---|---|---|
| A | - | - | - | - | - | - |
| B | 714 | 710 | 6 | 1 | 708 | 712 |
| C | 717 | 712 | 3 | 7 | 714 | 720 |
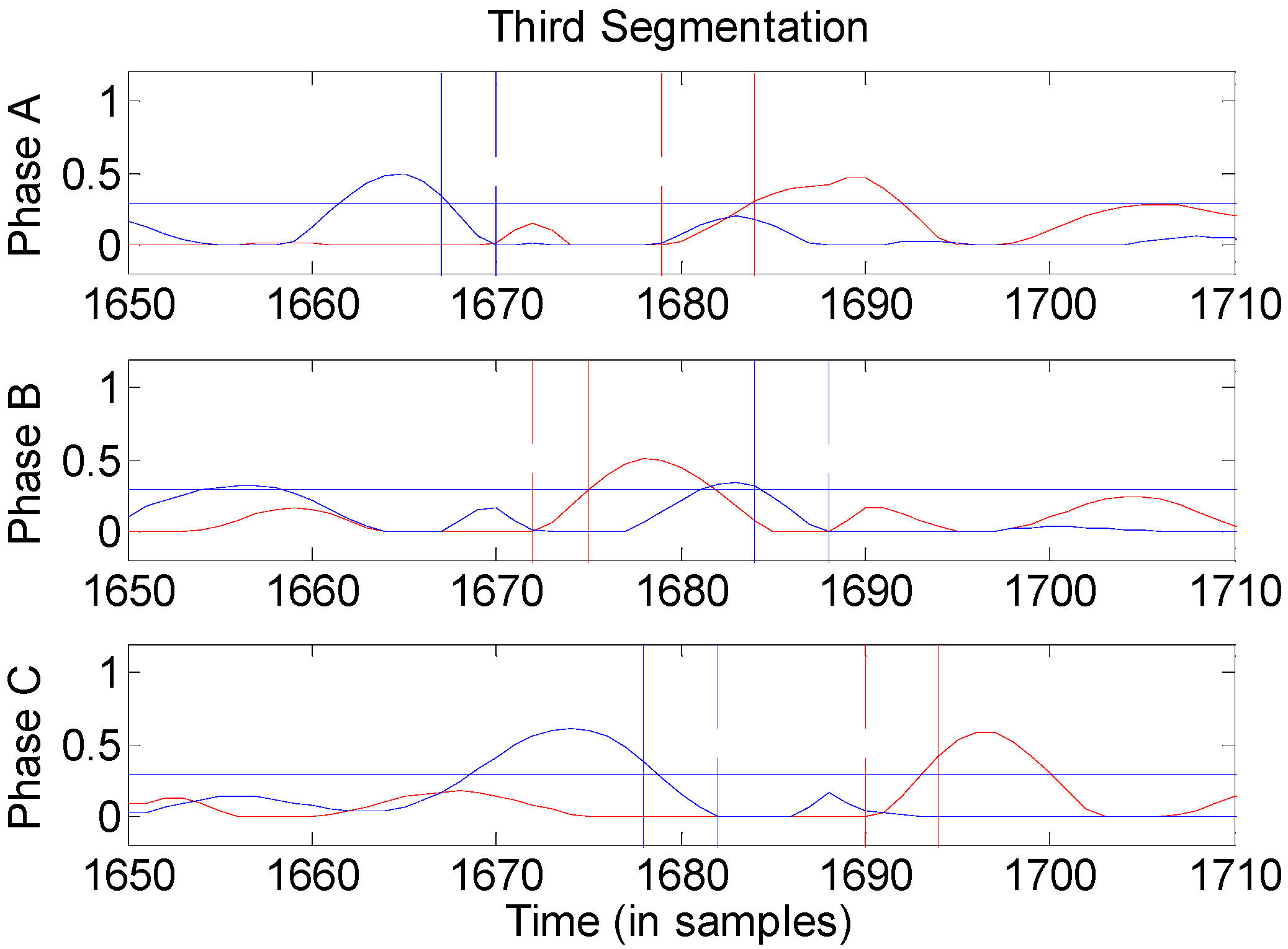
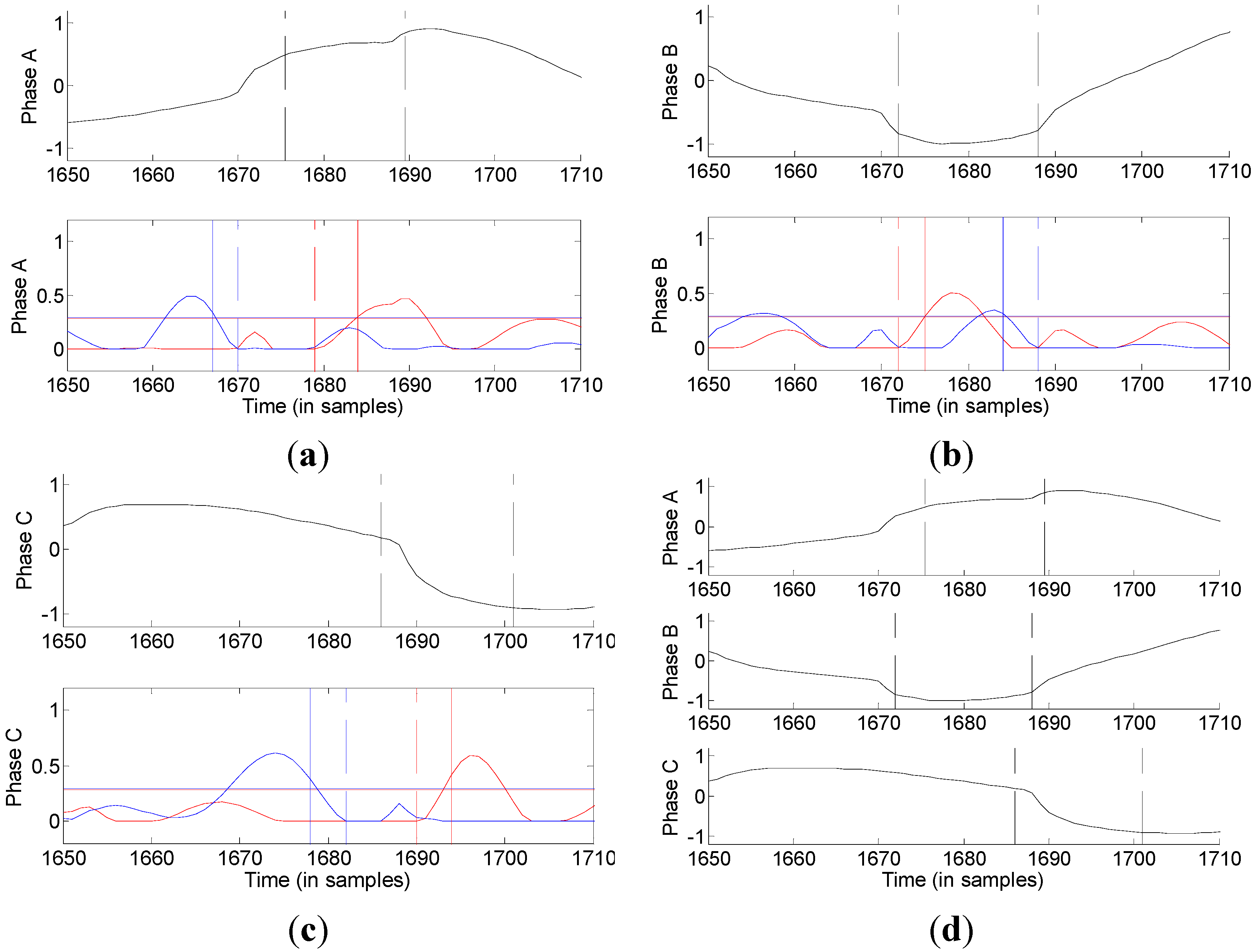
3.1.3. Third Transition

| Phase | Tc (sample) | Tac (sample) | Nc (sample) | Nac (sample) | Sc (sample) | Sac (sample) |
|---|---|---|---|---|---|---|
| A | 1684 | 1667 | 5 | 2 | 1679 | 1670 |
| B | 1675 | 1684 | 3 | 3 | 1672 | 1688 |
| C | 1694 | 1678 | 4 | 3 | 1690 | 1682 |
3.2. Estimate of the Signal Transitions Based on Causal and Anti-Causal Method
3.2.1. First Transition

3.2.2. Second Transition
3.2.3. Third Transition


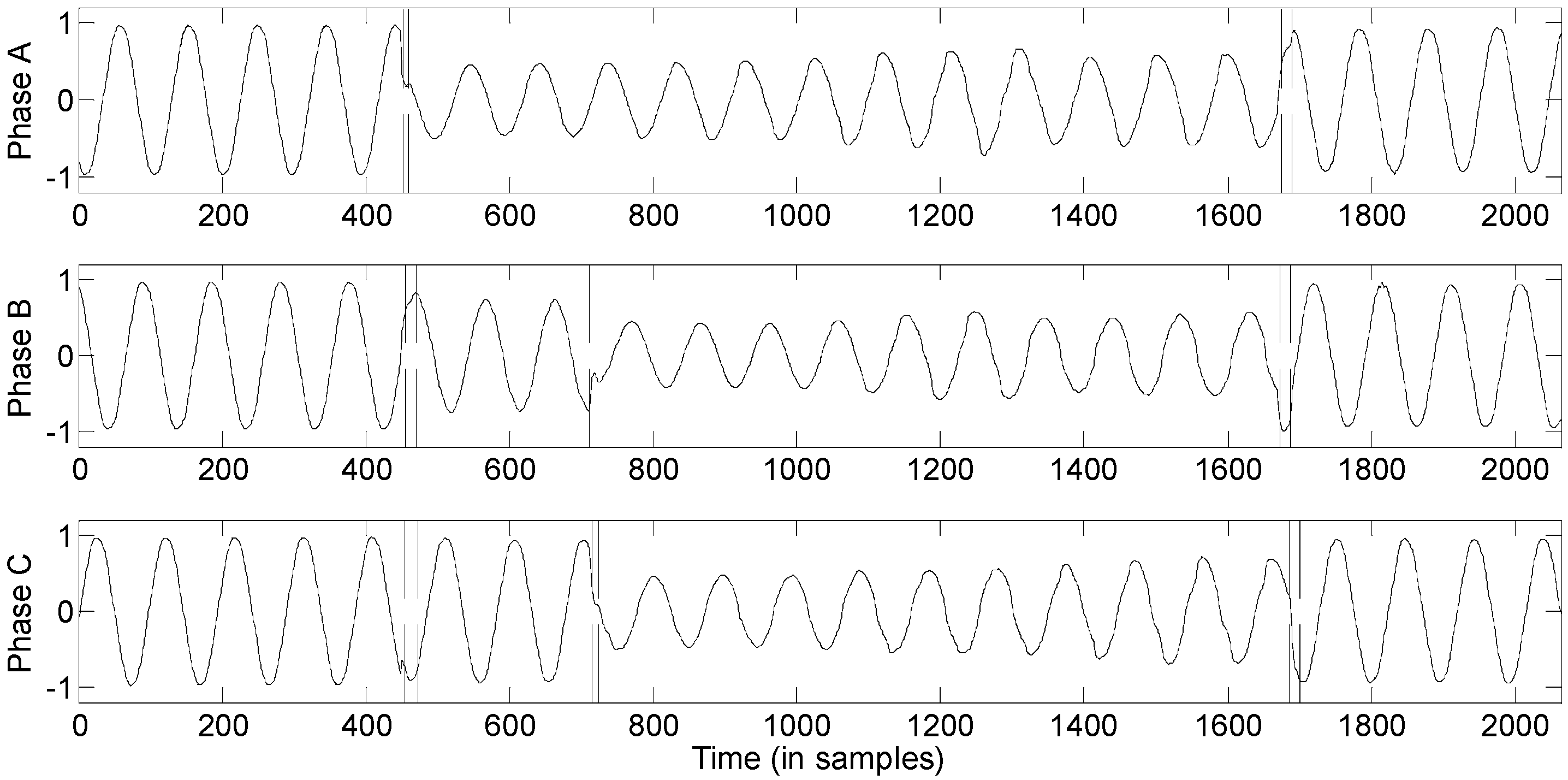
3.2.4. Final Three-Phase Segmentation of the Signal Transitions

4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dugan, R.C.; McGranaghan, M.F.; Santoso, S.; Beaty, H.W. Electrical Power Systems Quality, 3rd ed.; McGraw Hill Professional: New York, NY, USA, 2012. [Google Scholar]
- Moreno-Muñoz, A. Power Quality: Mitigation Technologies in a Distributed Environment; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Mozina, C.J. Interconnection protection of IPP generators at commercial/industrial facilities. IEEE Trans. Ind. Appl. 2001, 37, 681–688. [Google Scholar] [CrossRef]
- Moreno-Munoz, A.; de-la-Rosa, J.J.G.; Lopez-Rodriguez, M.A.; Flores-Arias, J.M.; Bellido-Outerino, F.J.; Ruiz-de-Adana, M. Improvement of power quality using distributed generation. Int. J. Electr. Power Energy Syst. 2010, 32, 1069–1076. [Google Scholar] [CrossRef]
- Moreno-Munoz, A.; Flores-Arias, J.; Gil-de-Castro, A.; de-la-Rosa, J.J.G. Power quality for energy efficient buildings. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri Capri, Italy, 9–11 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 191–195. [Google Scholar]
- Ribeiro, P.F.; Duque, C.A.; Ribeiro, P.M.; Cerqueira, A.S. Power Systems Signal Processing for Smart Grids; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Bollen, M.; Gu, I.; Santoso, S.; Mcgranaghan, M.; Crossley, P.; Ribeiro, M.; Ribeiro, P. Bridging the gap between signal and power. IEEE Signal Process. Mag. 2009, 26, 12–31. [Google Scholar] [CrossRef]
- Gu, I.Y.H.; Ernberg, N.; Styvaktakis, E.; Bollen, M.H.J. A Statistical-Based Sequential Method for Fast Online Detection of Fault-Induced Voltage Dips. IEEE Trans. Power Deliv. 2004, 19, 497–504. [Google Scholar] [CrossRef]
- De Apráiz, M.; Barros, J.; Diego, R.I. A real-time method for time-frequency detection of transient disturbances in voltage supply systems. Electr. Power Syst. Res. 2014, 108, 103–112. [Google Scholar] [CrossRef]
- Huang, N.; Zhang, S.; Cai, G.; Xu, D. Power Quality Disturbances Recognition Based on a Multiresolution Generalized S-Transform and a PSO-Improved Decision Tree. Energies 2015, 8, 549–572. [Google Scholar] [CrossRef]
- Le, C.D.; Gu, I.Y.H.; Bollen, M.H.J. Joint causal and anti-causal segmentation and location of transitions in power disturbances. In Proceedings of the 2010 IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–6. [Google Scholar]
- Bollen, M.H.; Gu, I. Signal Processing of Power Quality Disturbances; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Gustafsson, F. Adaptive Filtering and Change Detection; Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Mohanty, S.R.; Pradhan, A.K.; Routray, A. A Cumulative Sum-Based Fault Detector for Power System Relaying Application. IEEE Trans. Power Deliv. 2008, 23, 79–86. [Google Scholar] [CrossRef]
- Noori, M.R.; Jamali, S.; Shahrtash, S.M. Security assessment for a cumulative sum-based fault detector in transmission lines. In Proceedings of the 2011 10th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 8–11 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Montgomery, D.C. Introduction to Statistical Quality Control; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Basseville, M.; Nikiforov, I.V. Detection of Abrupt Changes: Theory and Application; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moreno-Garcia, I.M.; Moreno-Munoz, A.; Gil-de-Castro, A.; Bollen, M.; Gu, I.Y.H. Novel Segmentation Technique for Measured Three-Phase Voltage Dips. Energies 2015, 8, 8319-8338. https://doi.org/10.3390/en8088319
Moreno-Garcia IM, Moreno-Munoz A, Gil-de-Castro A, Bollen M, Gu IYH. Novel Segmentation Technique for Measured Three-Phase Voltage Dips. Energies. 2015; 8(8):8319-8338. https://doi.org/10.3390/en8088319
Chicago/Turabian StyleMoreno-Garcia, Isabel M., Antonio Moreno-Munoz, Aurora Gil-de-Castro, Math Bollen, and Irene Y. H. Gu. 2015. "Novel Segmentation Technique for Measured Three-Phase Voltage Dips" Energies 8, no. 8: 8319-8338. https://doi.org/10.3390/en8088319