
Inductive-Based Wireless Power Recharging System for an Innovative Endoscopic Capsule

Abstract
:1. Introduction
2. Objectives
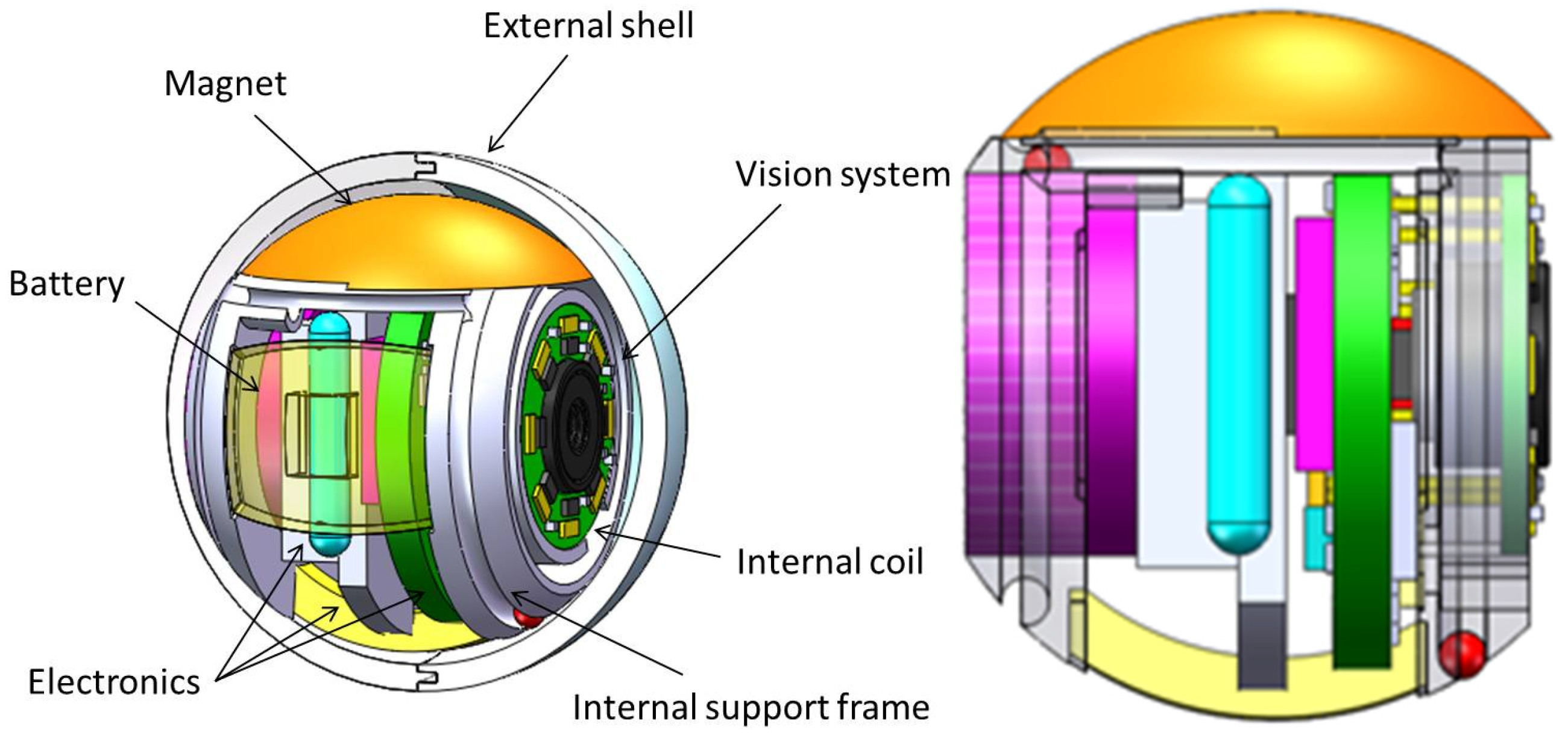
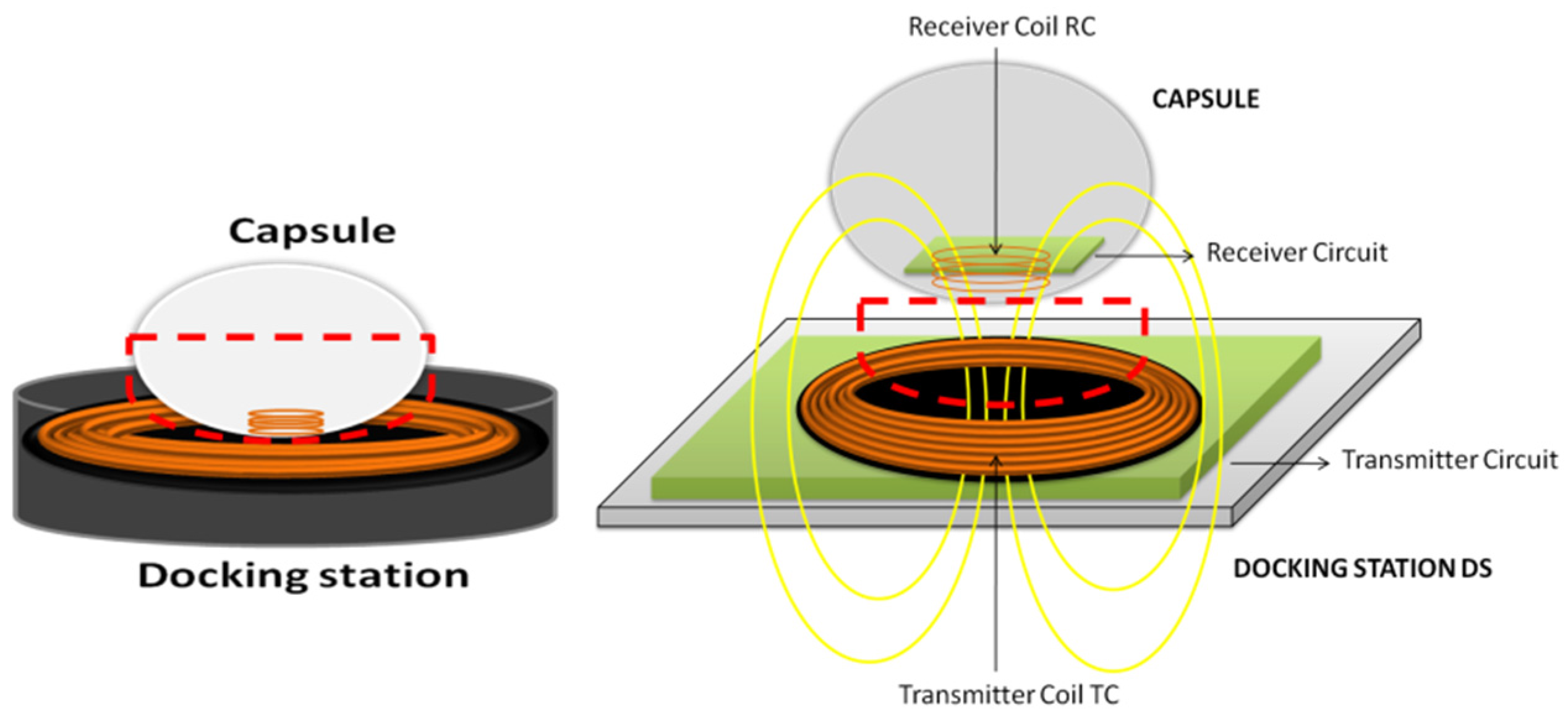
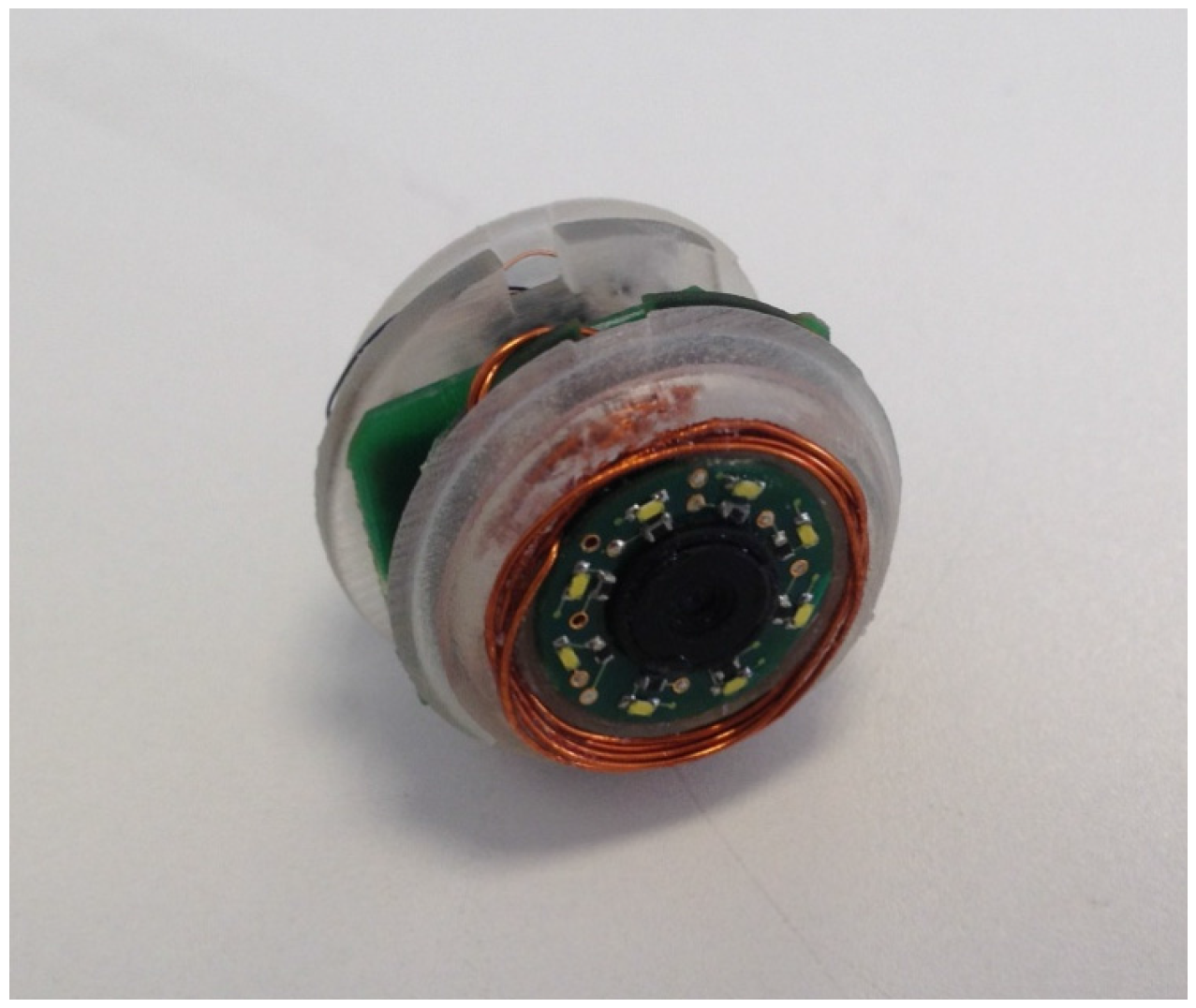
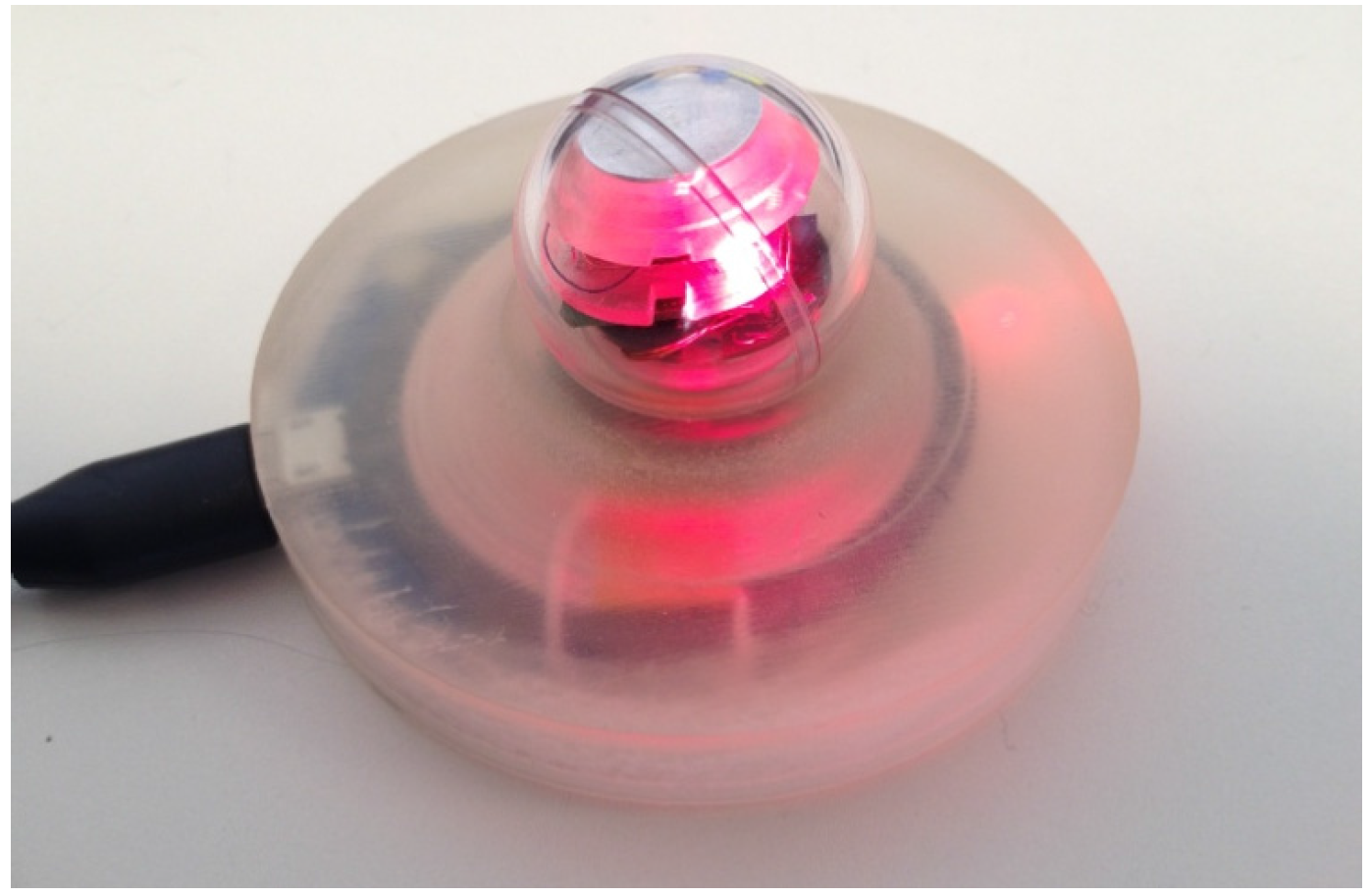
2.1. Endoscopic Capsule Case Study

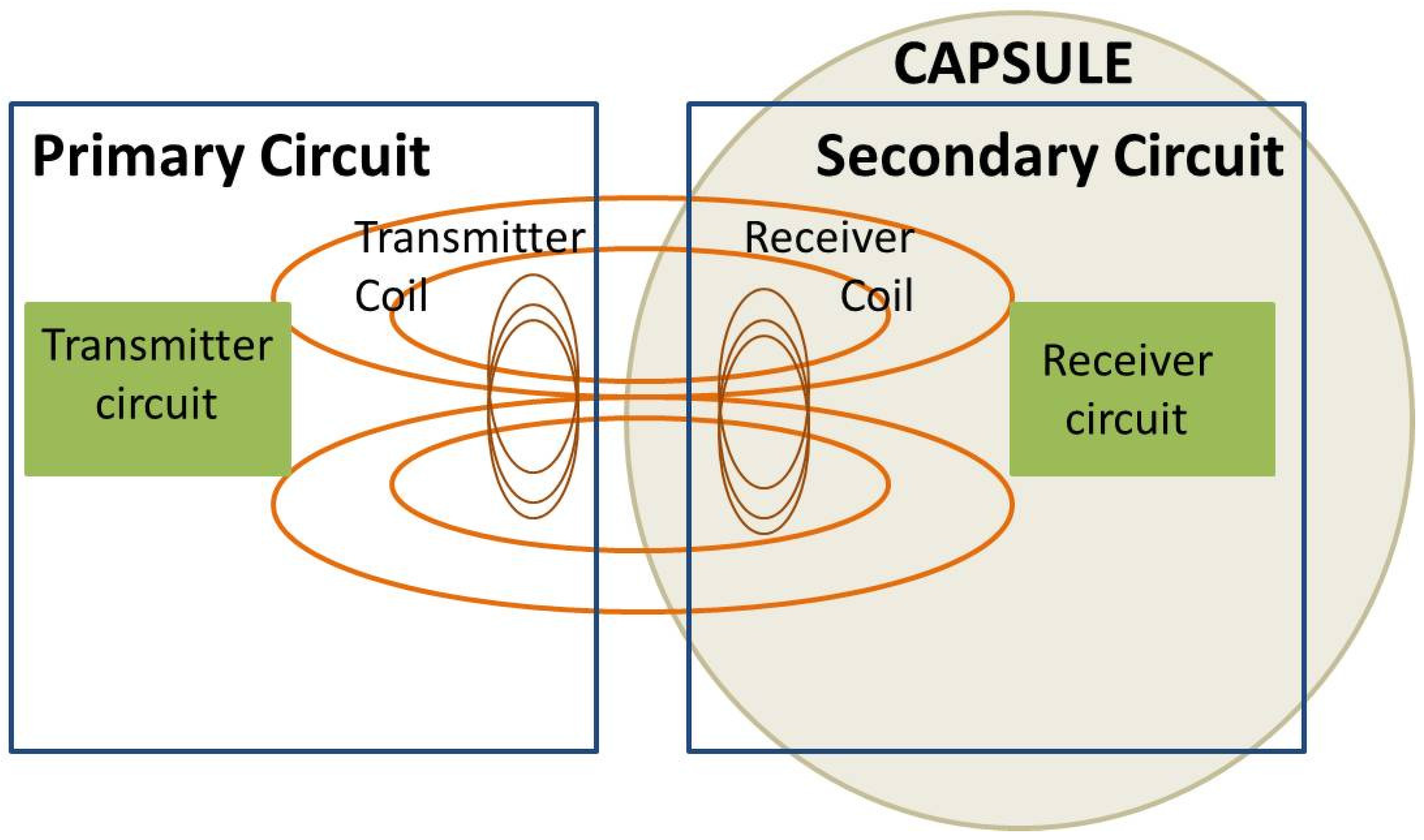
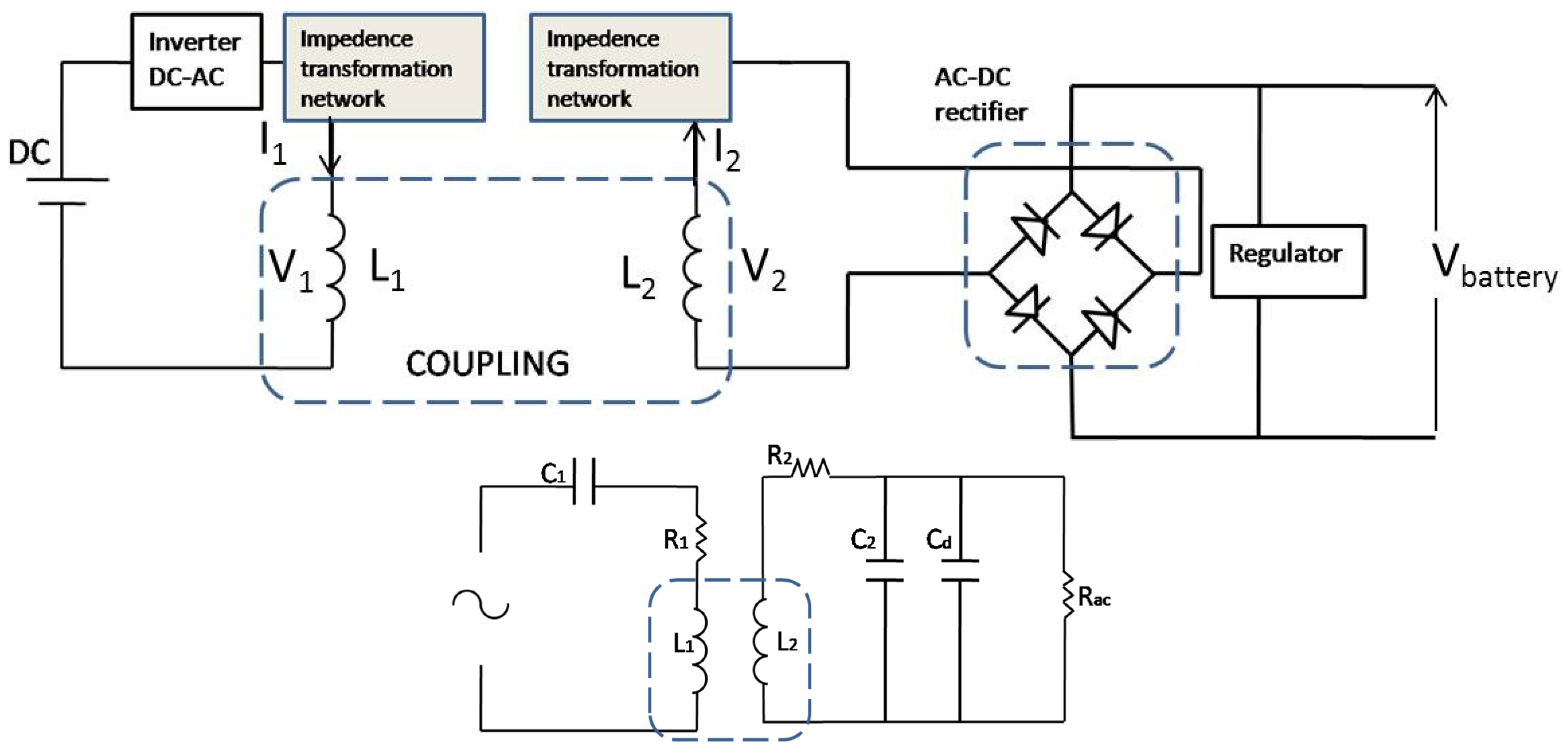
3. Implementation of the Wireless Recharging System
3.1. Design Overview


| Battery Type | Capacity C [mAh] | Max. Continuous discharge current [mA] | Pick current [mA] | Dimensions [mm3] | Weight [g] | Supply [V] | Charge Voltage [V] | Charge Current [mA] | |
|---|---|---|---|---|---|---|---|---|---|
| VARTA CP 1254 | Rechargeable Lithium button Cells | 50 | 100 mA | 150@2s | 12.1(Ø) × 5.4 | 1.6 | 3.7 | 4.2 | 0.5 C 25mA |
| Coil Type | Wire | dout | din | l | Number of Turns | Number of Layers | |
| Receiver coil | Multi-layer spiral coil | AWG 29 | 15.5 mm | 13.5 mm | 3 mm | 12 (6 per layer) | 2 |
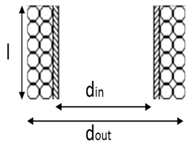
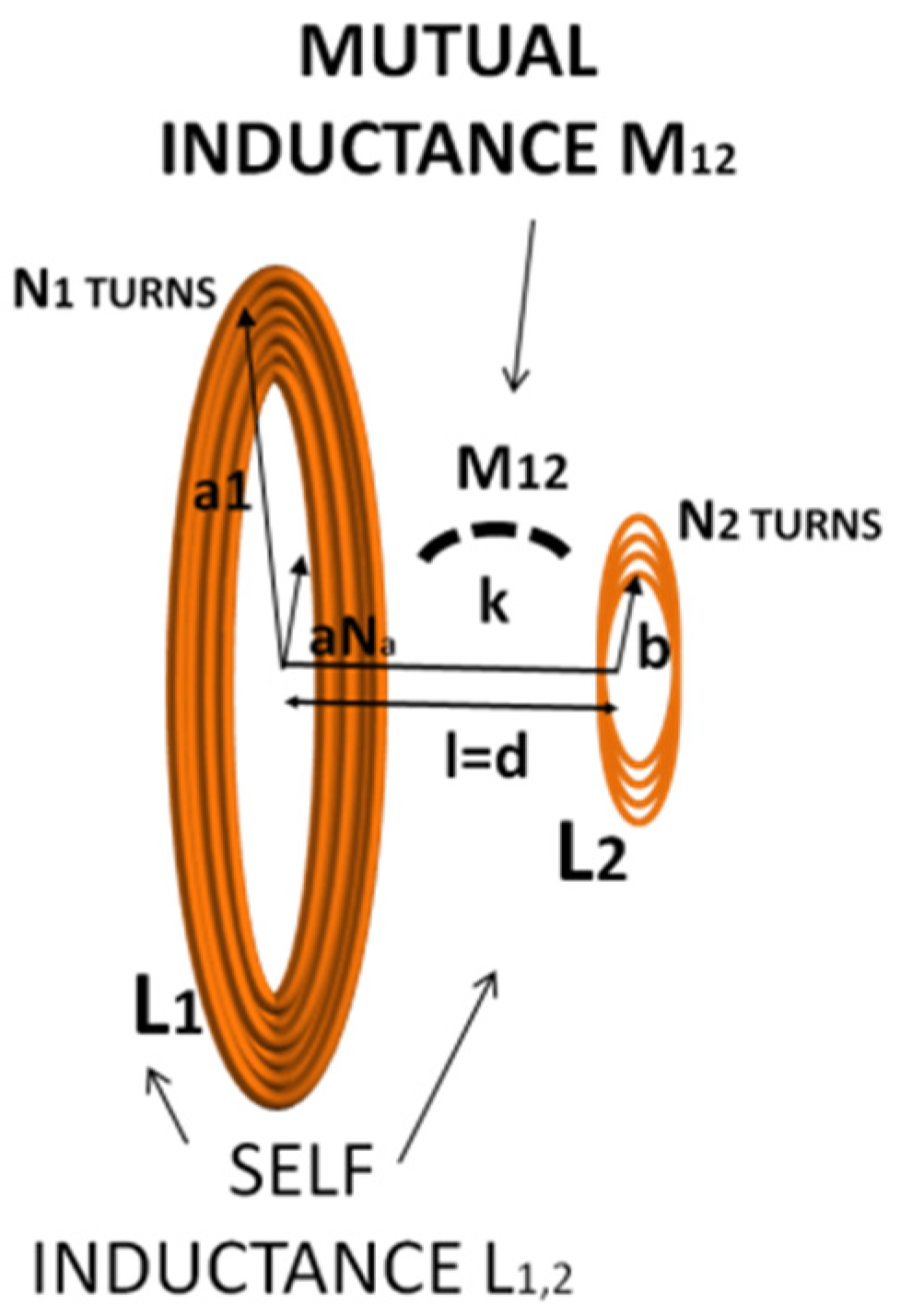
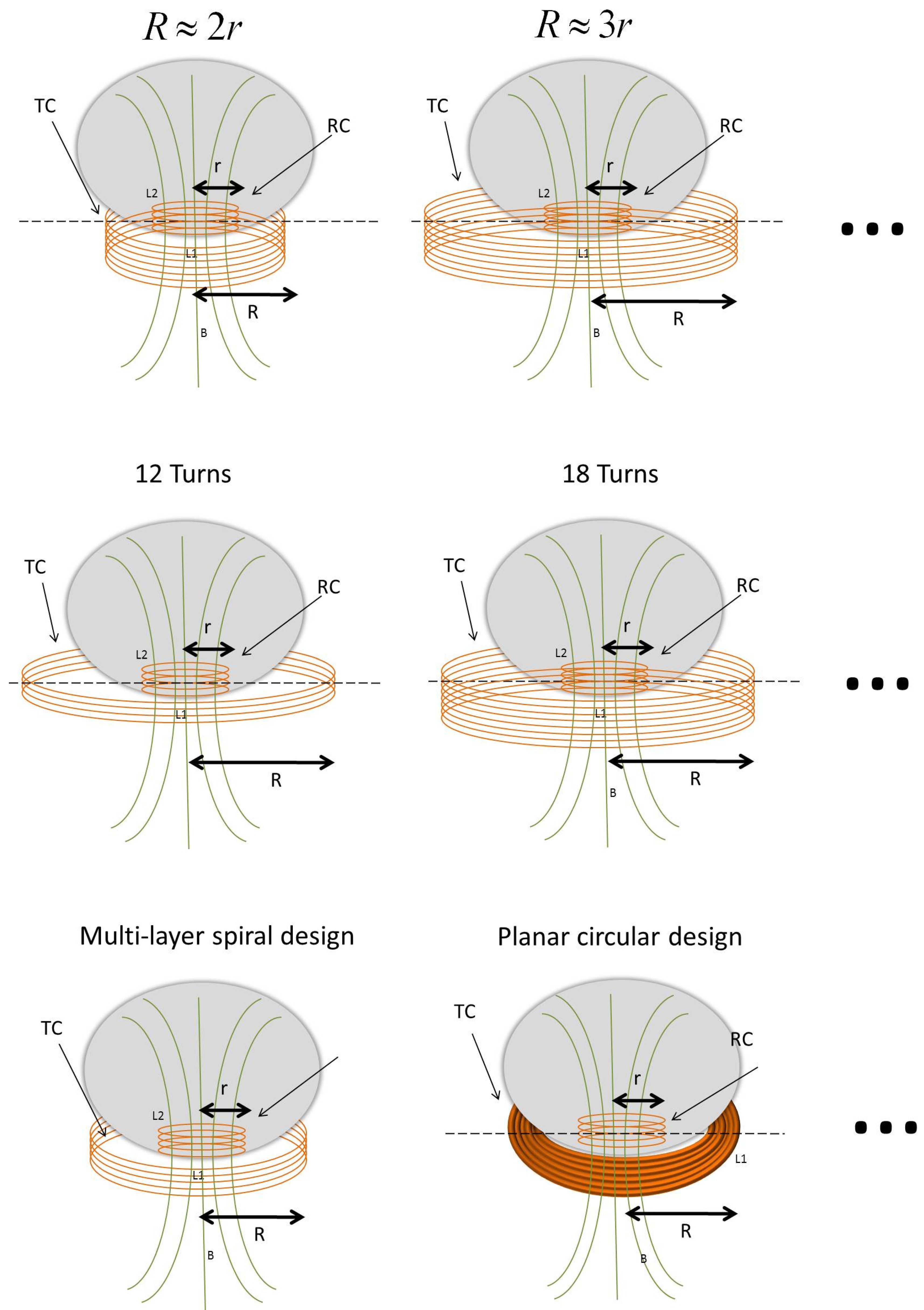
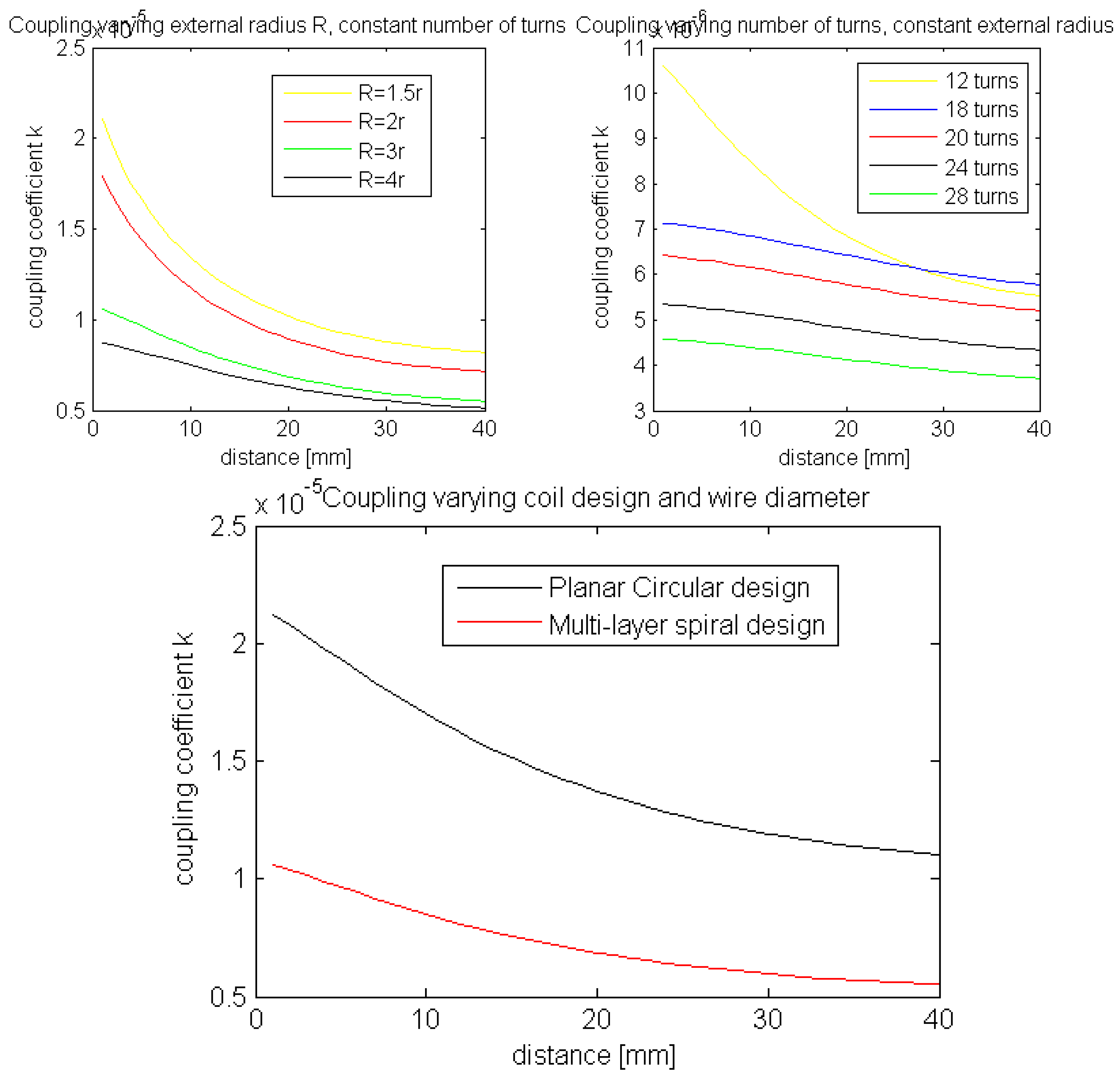
3.2. Receiver and Transmitter Coil Design
- optimization of the coil geometry with respect to the given constraints;
- external coil geometry;
- type and size of wire used;
- number of turns;
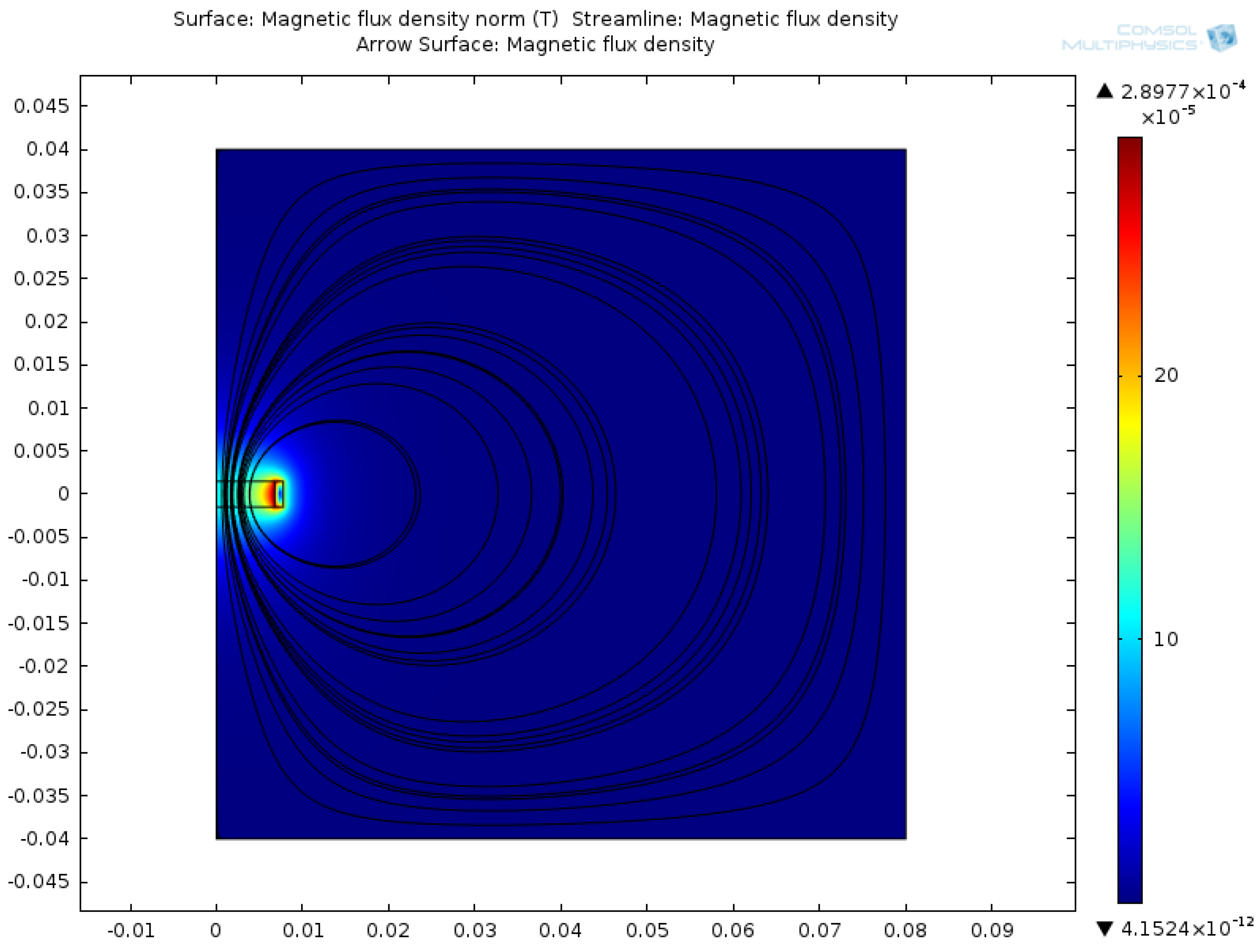
- analysis of the magnetic field generated by the two coils.




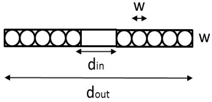
| Coil Type | Wire | dout | din | l | Number of Turns | Number of Layers | |
| Transmitter coil | Planar circular coil | AWG 18 | 42.61 mm | 20.81 mm | - | 10 | Single |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Self-inductance (measured) | Self-inductance (calculated) | Self-inductance (simulated) | |
|---|---|---|---|
| Transmitter coil | 3.6 µH | 3.95 µH | 3.84 µH |
| Receiver coil | 3.3 µH | 3.45 µH | 3.36 µH |
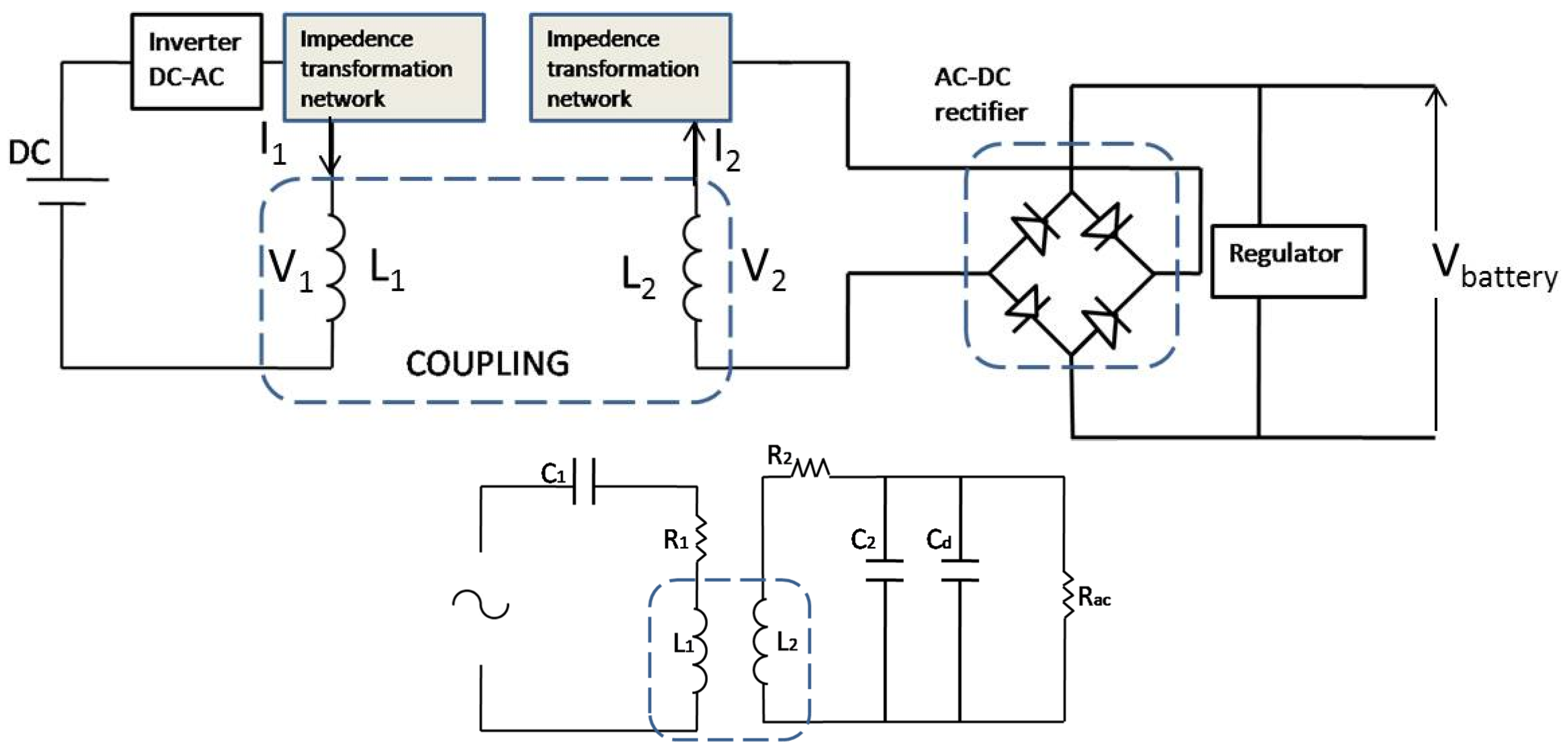
3.3. Overview of Internal and External Circuits
4. System Integration



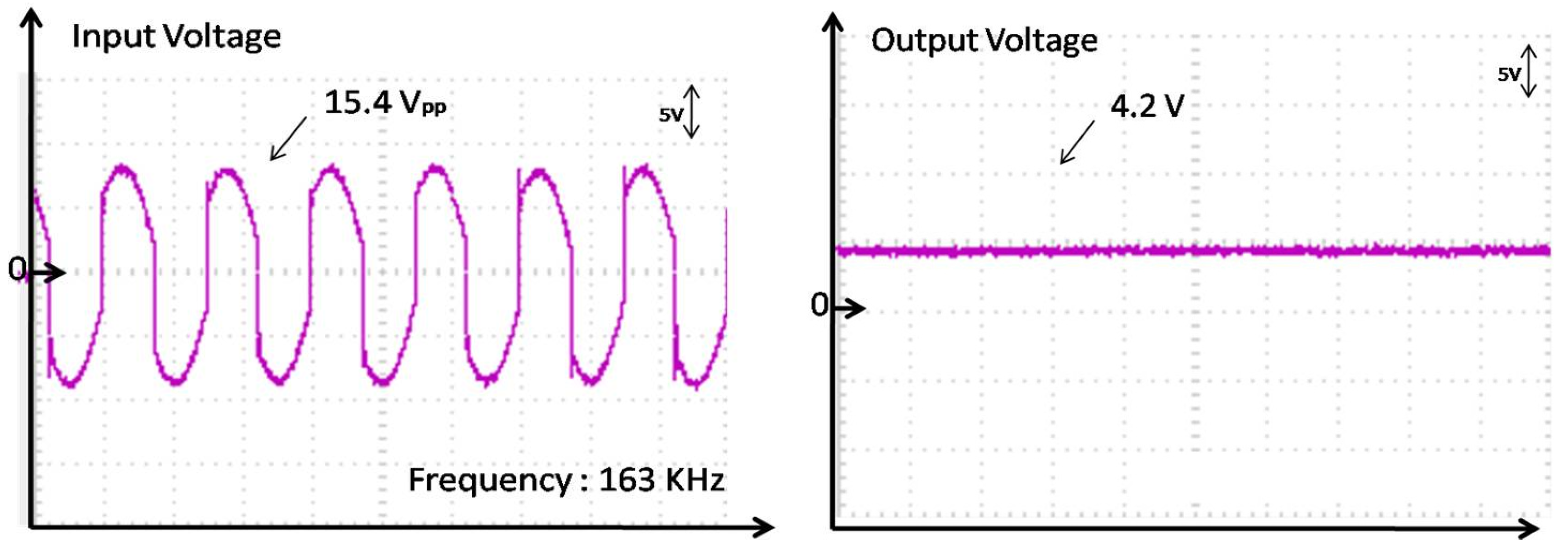
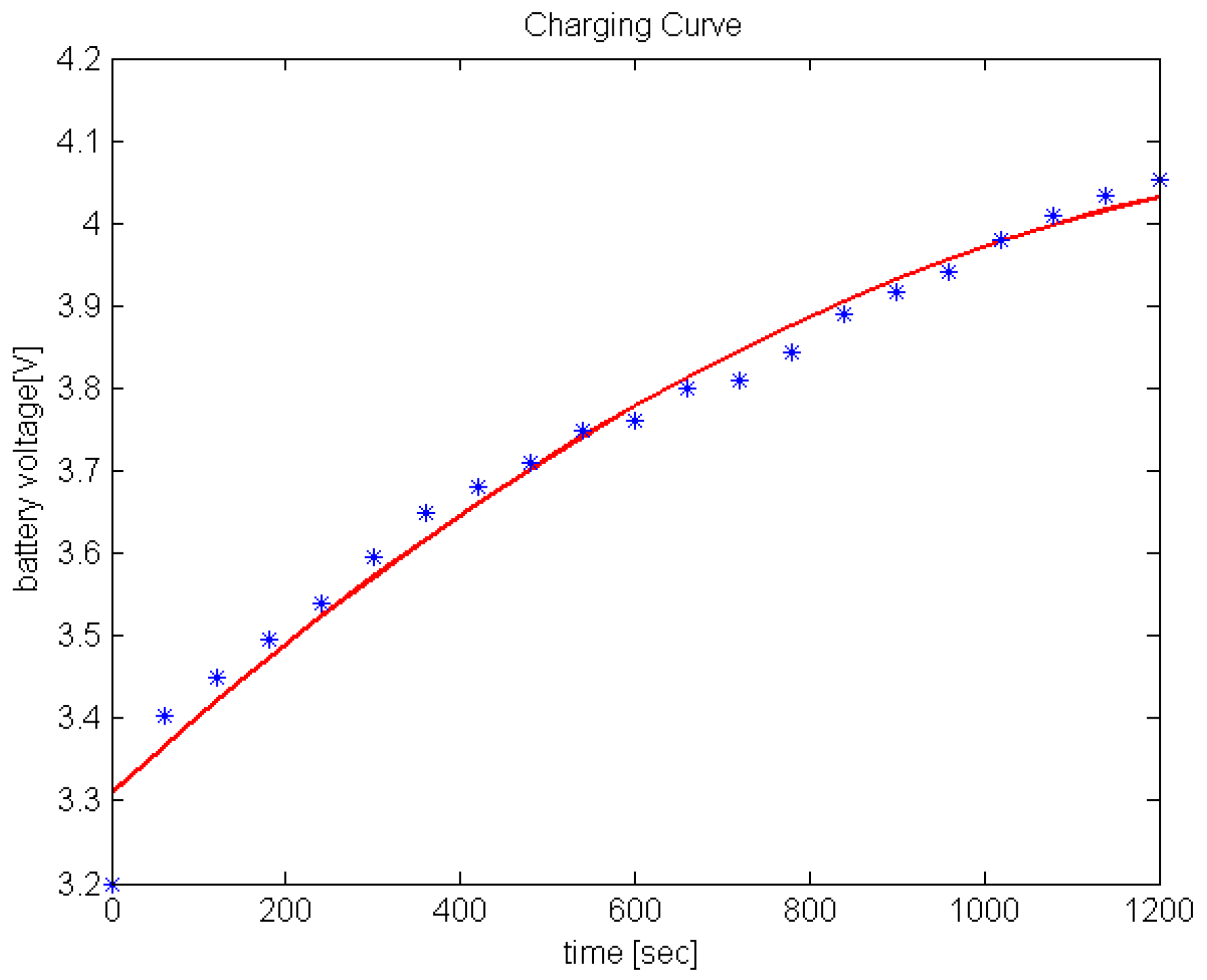
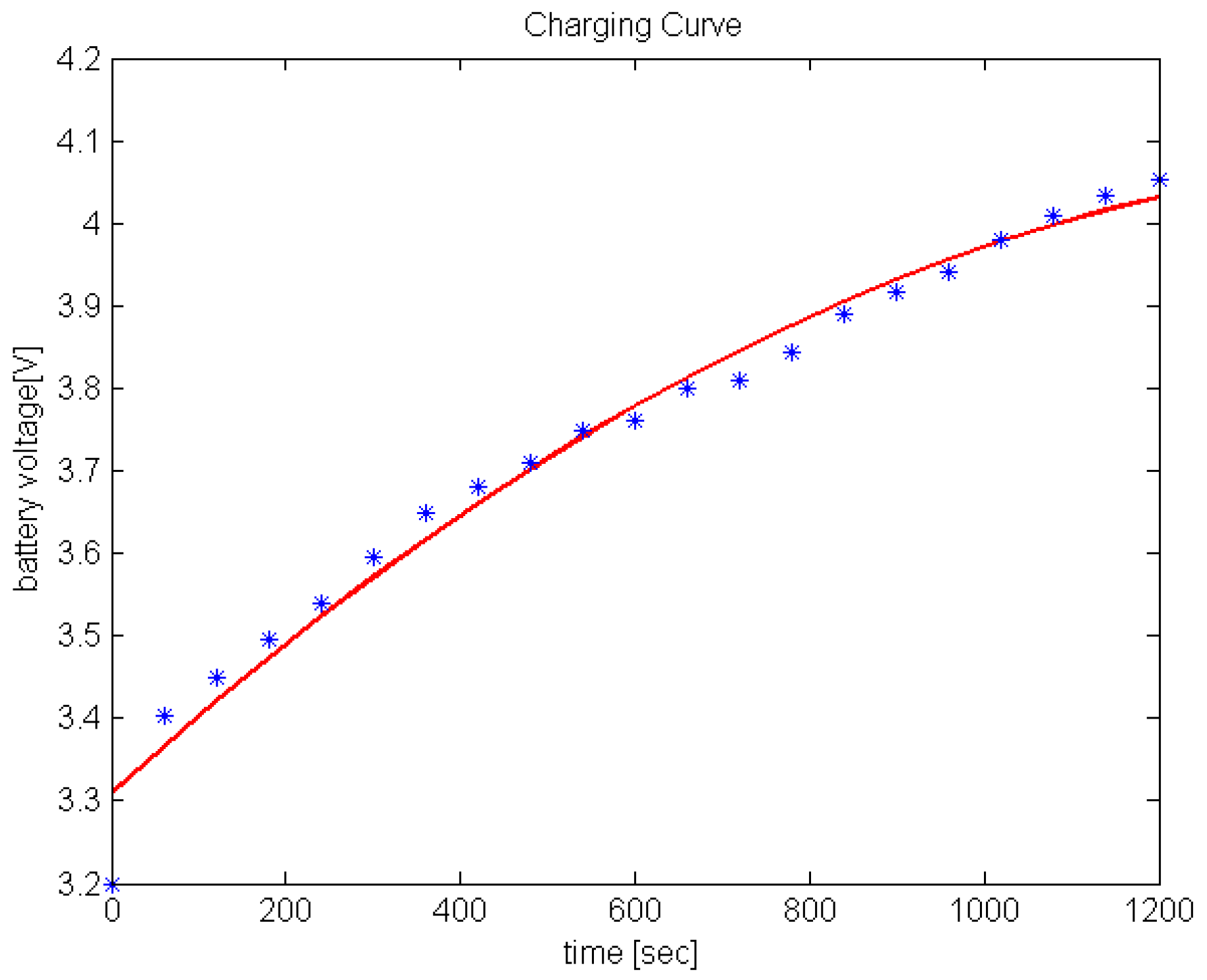
5. Experimental Results

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Toennies, J.L.; Tortora, G.; Simi, M.; Valdastri, P.; Webster, R.J., III. Swallowable medical devices for diagnosis and surgery: The state of the art. J. Mech. Eng. Sci. 2010, 224, 1397–1414. [Google Scholar] [CrossRef] [Green Version]
- Waterman, M.; Eliakim, R. Capsule enteroscopy of the small intestine. Abdom. Imaging 2009, 34, 452–458. [Google Scholar] [CrossRef] [PubMed]
- De Falco, I.; Tortora, G.; Dario, P.; Menciassi, A. An Integrated System for Wireless Capsule Endoscopy in a Liquid-Distended Stomach. IEEE Transact. Biomed. Eng. (TBME) 2013, 61, 794–804. [Google Scholar] [CrossRef] [PubMed]
- Tortora, G.; Valdastri, P.; Susilo, E.; Menciassi, A.; Dario, P.; Rieber, F.; Schurr, M.O. Propeller-based wireless device for active capsular endoscopy in the gastric district. Minim. Invasive Ther. Allied Technol. (MITAT) 2009, 18, 280–290. [Google Scholar] [CrossRef] [PubMed]
- Arezzo, A.; Menciassi, A.; Valdastri, P.; Ciuti, G.; Lucarini, G.; Salerno, M.; Di Natali, C.; Verra, M.; Dario, P.; Morino, M. Experimental assessment of a novel robotically-driven endoscopic capsule compared to traditional colonoscopy. Dig. Liver Dis. 2013, 45, 657–662. [Google Scholar] [CrossRef] [PubMed]
- Ciuti, G.; Valdastri, P.; Menciassi, A.; Dario, P. Robotic magnetic steering and locomotion of capsule endoscope for diagnostic and surgical endoluminal procedures. Robotica 2010, 28, 199–207. [Google Scholar] [CrossRef]
- Lucarini, G.; Ciuti, G.; Mura, M.; Rizzo, R.; Menciassi, A. A new concept for magnetic capsule colonoscopy based on an electromagnetic system. Int. J. Adv. Robot. Syst. 2015. [Google Scholar] [CrossRef]
- Carta, R.; Tortora, G.; Lenaerts, B.; Thoné, J.; Valdastri, P.; Menciassi, A.; Dario, P.; Puers, R. Wireless powering for a self-propelled endoscopic capsule. Biosens. Bioelectron. 2009, 25, 845R–851R. [Google Scholar] [CrossRef] [PubMed]
- Carta, R.; Lenaerts, B.; Thoné, J.; Tortora, G.; Valdastri, P.; Menciassi, A.; Puers, R.; Dario, P. Wireless power supply as enabling technology towards active locomotion in capsular endoscopy. In Proceedings of the Eurosensors XXII, Book of abstracts, Dresden, Germany, 7–10 September 2008; pp. 1369–1372.
- Basar, M.R.; Ahmad, M.Y.; Cho, J.; Ibrahim, F. Application of wireless power transmission systems in wireless capsule endoscopy: An overview. Sensors 2014, 14, 10929–10951. [Google Scholar] [CrossRef] [PubMed]
- Xin, W.; Yan, G.; Wang, W. Study of a wireless power transmission system for an active capsule endoscope. Int. J. Med. Robot. Comput. Assist. Surg. 2010, 6, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Flack, F.C.; James, E.D.; Schlapp, D.M. Mutual inductance of air-cored coils: Effect on design of radio-frequency coupled implants. Med. Biol. Eng. 1971, 9, 79–85. [Google Scholar] [CrossRef]
- Chen, S.C.Q.; Thomas, V. Optimization of inductive RFID technology. In Proceedings of the Electronics and the Environment, Denver, CO, USA, 7–9 May 2001; pp. 82–87.
- Salim, A.; Baldi, A.; Ziaie, B. Indutive link modeling and design guidelines for optimum power transfer in implantable wireless microsystems. In Proceedings of the 25th IEEE EMBS, Cancum, Mexico, 17–27 September 2003; pp. 3368–3371.
- Heetderks, W.J. RF powering of millimeter- and submillimeter-sized neural prosthetic implants. IEEE Trans. Biomed. Eng. 1988, 35, 323–327. [Google Scholar] [CrossRef] [PubMed]
- Adeeb, M.A.; Islam, A.B.; Haider, M.R.; Tulip, F.S.; Ericson, M.N.; Islam, S.K. An inductive link-based wireless power transfer system for biomedical applications. Act. Passiv. Electron. Compon. 2012, 2012. [Google Scholar] [CrossRef]
- Sadiku, M.N.O. Elements of Electromagnetics, 4th ed.; Oxford University Press: Oxford, UK, 2007; p. 386. [Google Scholar]
- Rafael, M.D.; Gordana, K.F. Analysis of the Coupling Coefficient in Inductive Energy Transfer Systems. Passiv. Electron. Compon. 2014, 2014. [Google Scholar] [CrossRef]
- Babic, S.I.; Akyel, C. New analytic-numerical solutions for the mutual inductance of two coaxial circular coils with rectangular cross section in air. IEEE Trans. Magn. 2006, 42, 1661–1669. [Google Scholar] [CrossRef]
- Zierhofer, C.M.; Hochmair, E.S. Geometric approach for coupling enhancement of magnetically coupled coils. IEEE Trans. Biomed. Eng. 1996, 43, 708–714. [Google Scholar] [CrossRef] [PubMed]
- Lukas, K.; Martin, P.; Milan, A.; Roman, J. Coil optimization with aid of flat coil optimizer. In Proceedings of the 5th WSEAS Congress on Applied Computing Conference and 1st International Conference on Biologically Inspired Computation, Faro, Portugal, 2–4 May 2012; pp. 124–127.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tortora, G.; Mulana, F.; Ciuti, G.; Dario, P.; Menciassi, A. Inductive-Based Wireless Power Recharging System for an Innovative Endoscopic Capsule. Energies 2015, 8, 10315-10334. https://doi.org/10.3390/en80910315
Tortora G, Mulana F, Ciuti G, Dario P, Menciassi A. Inductive-Based Wireless Power Recharging System for an Innovative Endoscopic Capsule. Energies. 2015; 8(9):10315-10334. https://doi.org/10.3390/en80910315
Chicago/Turabian StyleTortora, Giuseppe, Francesca Mulana, Gastone Ciuti, Paolo Dario, and Arianna Menciassi. 2015. "Inductive-Based Wireless Power Recharging System for an Innovative Endoscopic Capsule" Energies 8, no. 9: 10315-10334. https://doi.org/10.3390/en80910315