
Enhanced Predictive Current Control of Three-Phase Grid-Tied Reversible Converters with Improved Switching Patterns

Abstract
:1. Introduction
2. Operating Principle of Predictive Current Control for Three-Phase Grid-Tied Reversible Converters
3. Performance Analysis of the Predictive Current Control Strategy
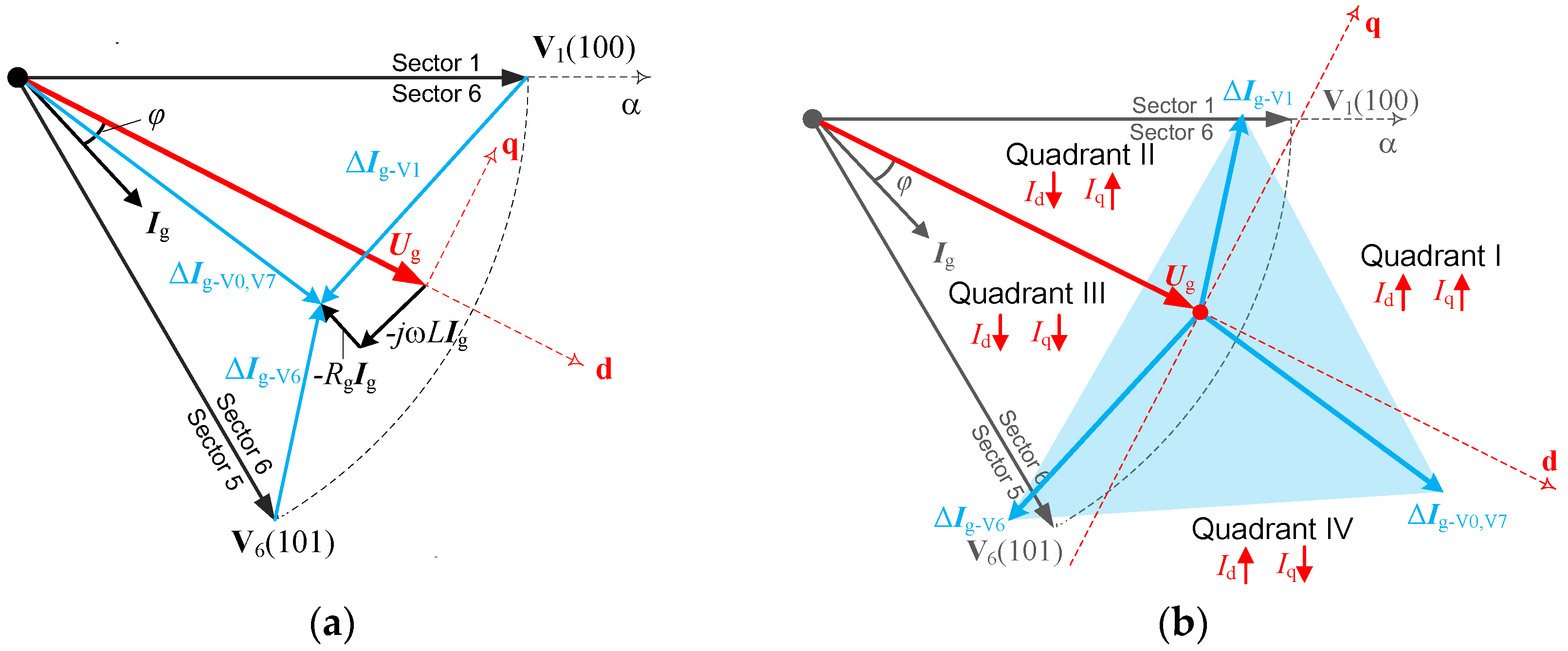
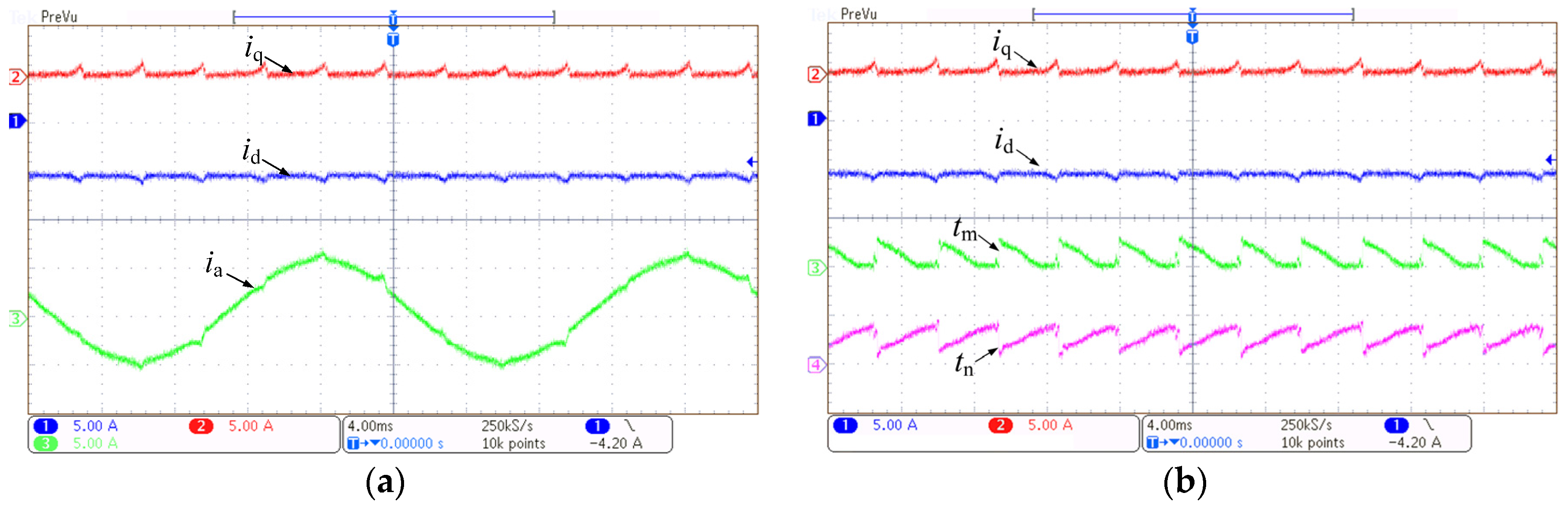
3.1. Rectifier Mode Analysis



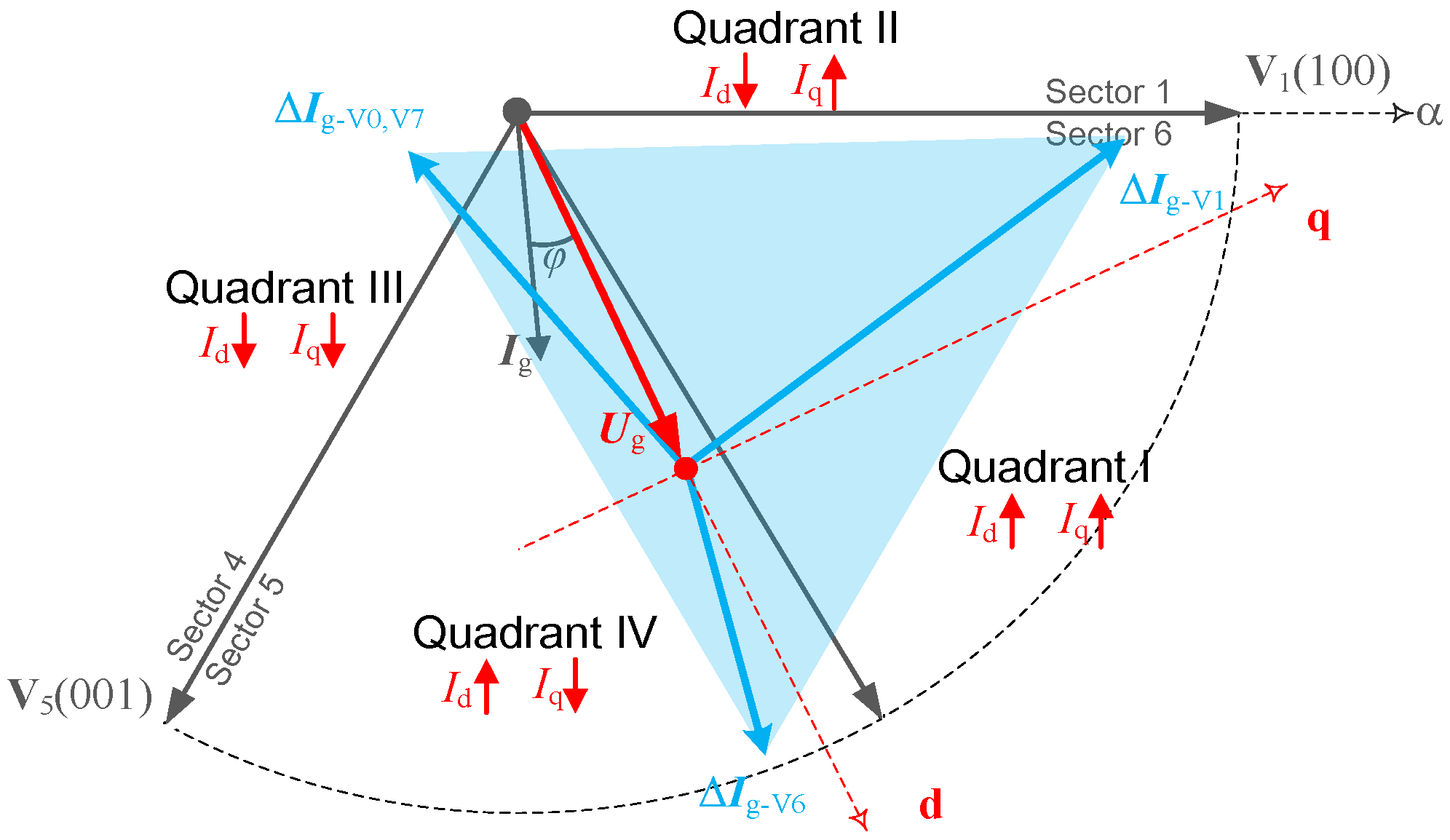
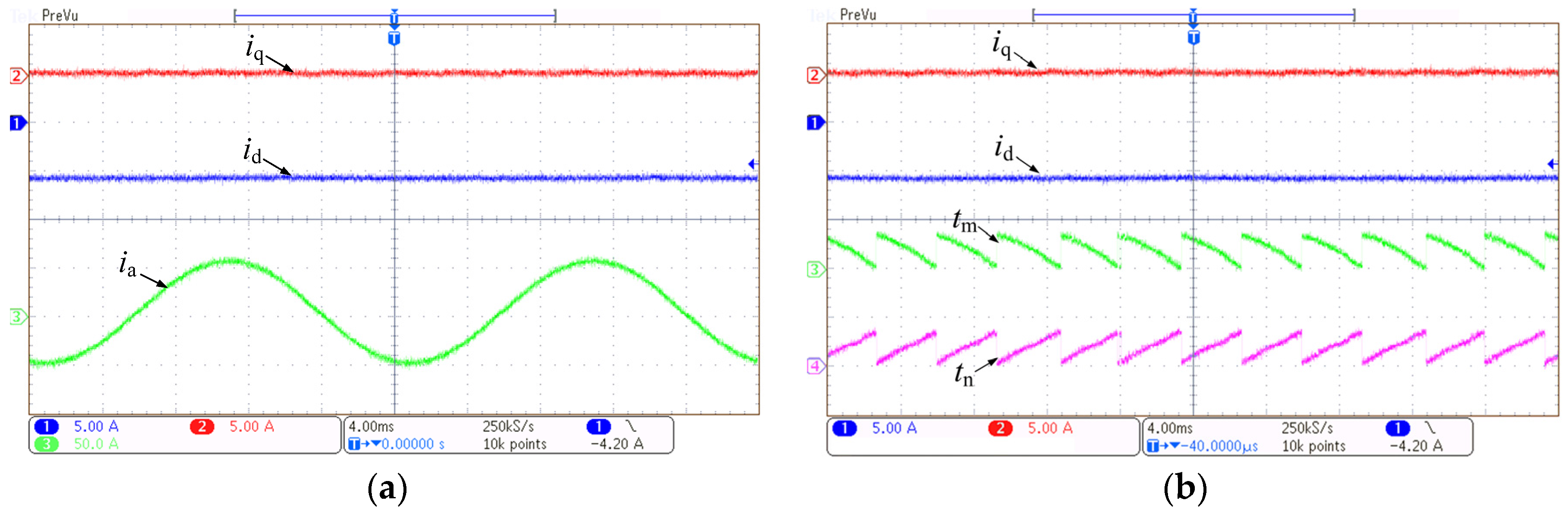
3.2. Inverter Mode Analysis



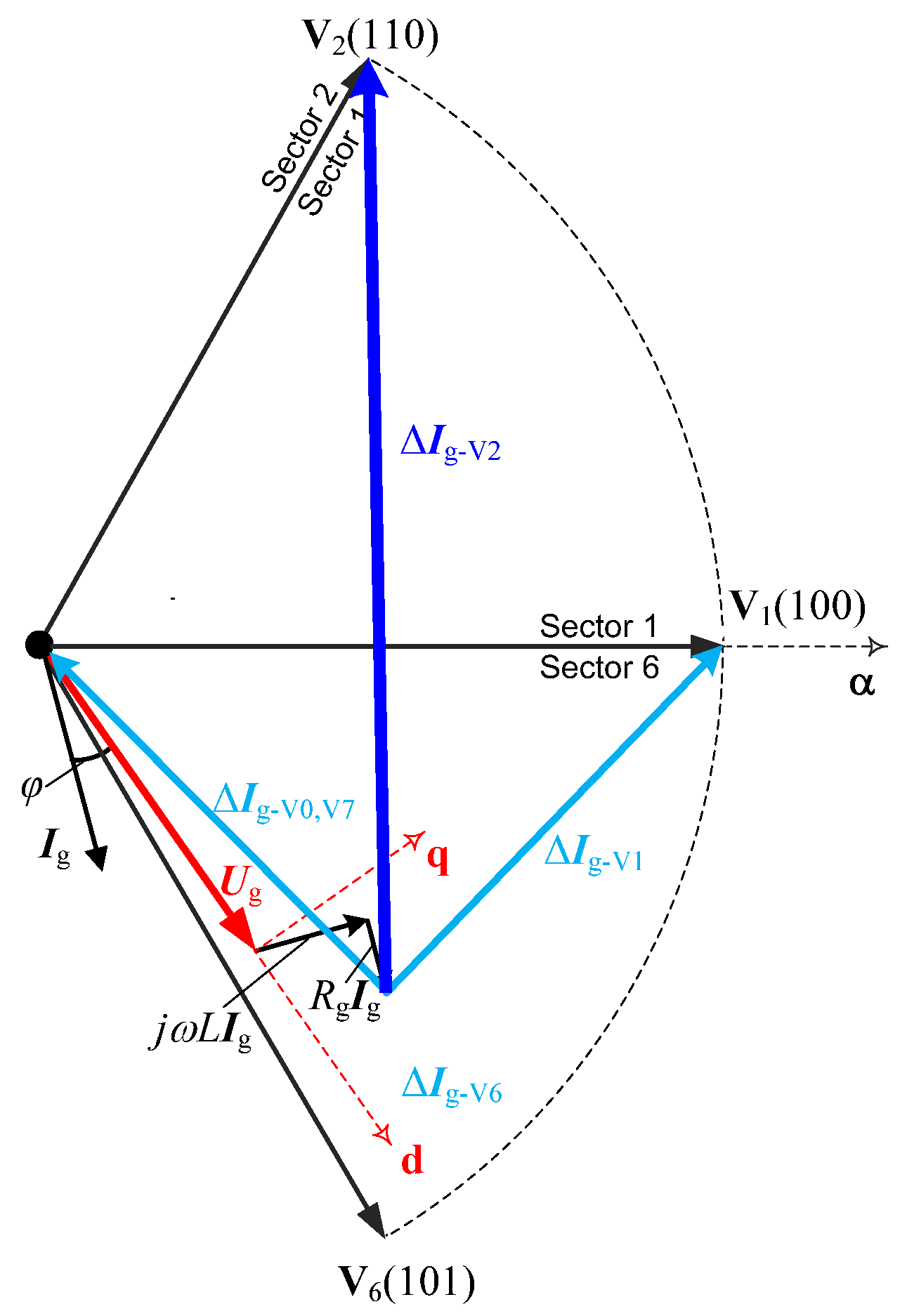
3.3. Modified Switching Patterns for Reversible Converters


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | tm > 0 and tn > 0 | tm > 0 and tn < 0 | tm < 0 and tn > 0 | tm < 0 and tn < 0 |
|---|---|---|---|---|
| 1 | V1, V2 | V6, V1 | V2, V3 | V4, V5 |
| 2 | V2, V3 | V1, V2 | V3, V4 | V5, V6 |
| 3 | V3, V4 | V2, V3 | V4, V5 | V6, V1 |
| 4 | V4, V5 | V3, V4 | V5, V6 | V1, V2 |
| 5 | V5, V6 | V4, V5 | V6, V1 | V2, V3 |
| 6 | V6, V1 | V5, V6 | V1, V2 | V3, V4 |
4. Experimental Validations
| Parameter | Value |
|---|---|
| Rated power | 11 kW |
| Line-to-line voltage (Root mean squar value) | 245 V |
| Grid frequency | 50 Hz |
| Filter inductance | 7.8 mH |
| Filter resistance | 0.1 Ω |
| DC-link capacitor | 950 μF |
| Sampling period | 100 μs |
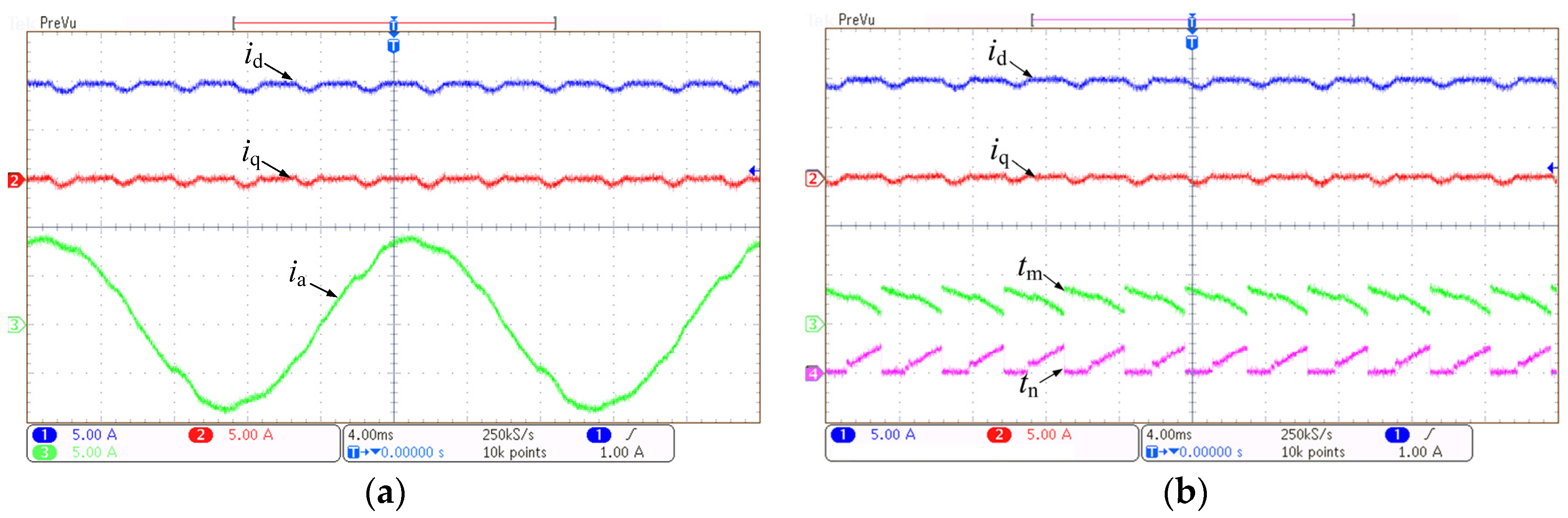
4.1. Steady-State Behaviours




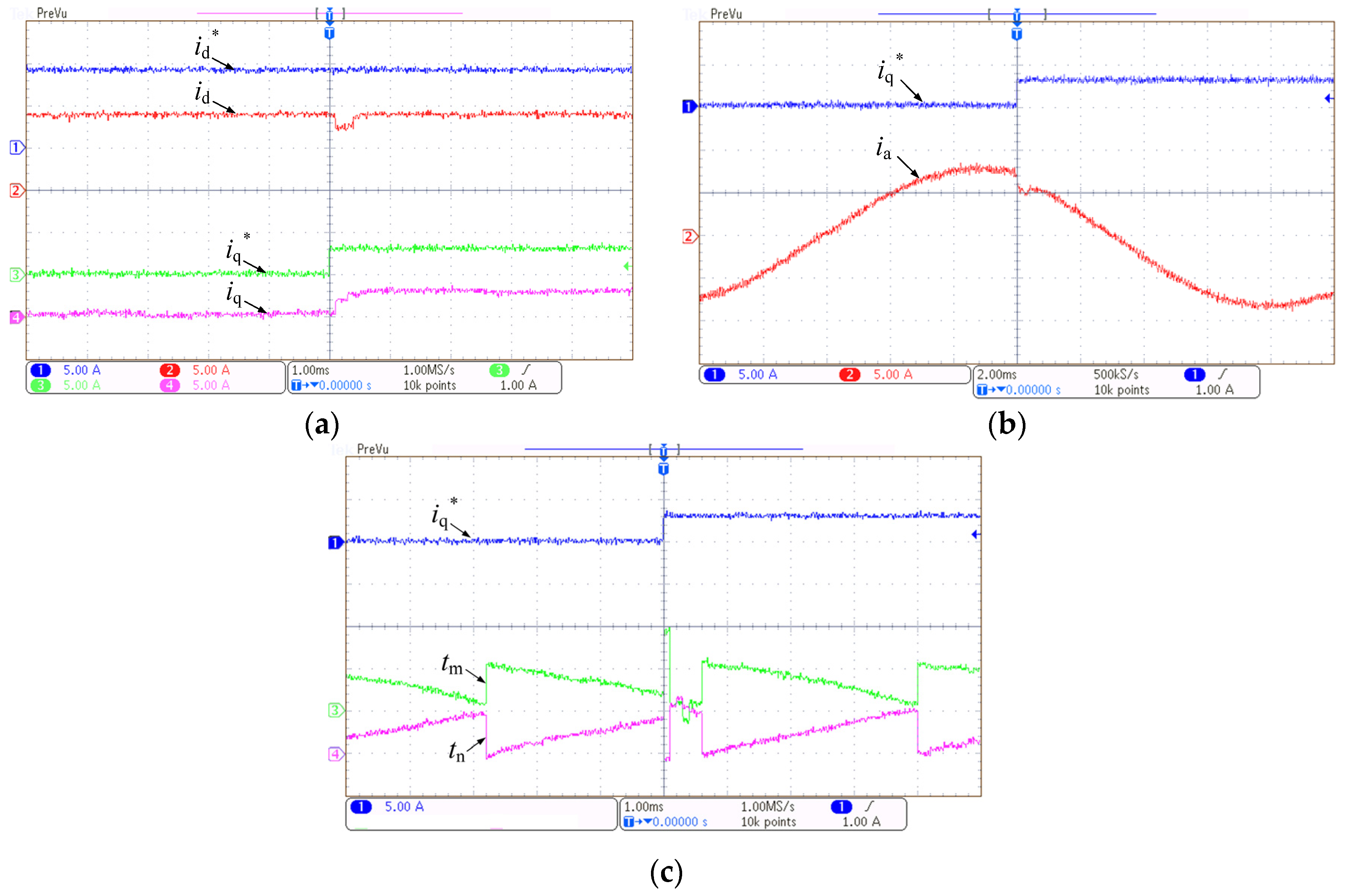
4.2. Transient Responses




5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Min, R.; Chen, C.; Zhang, X.; Zou, X.; Tong, Q.; Zhang, Q. An optimal current observer for predictive current controlled buck DC-DC converters. Sensors 2014, 14, 8851–8868. [Google Scholar] [CrossRef] [PubMed]
- Tong, Q.; Chen, C.; Zhang, Q.; Zou, X. A sensorless predictive current controlled boost converter by using an EKF with load variation effect elimination function. Sensors 2015, 15, 9986–10003. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Xie, W.; Li, Z.; Zhang, Y. Low-complexity model predictive power control: Double-vector-based approach. IEEE Trans. Ind. Electron. 2014, 61, 5871–5880. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Quevedo, D.E.; Vazquez, S.; Franquelo, L.G. Generalized predictive direct power control for AC/DC converters. In Proceeding of the IEEE Annual International Energy Conversion Congress and Exhibition (ECCE Asia), Melbourne, VIC, Australia, 3–6 June 2013.
- Yaramasu, V.; Rivera, M.; Narimani, M.; Wu, B.; Rodriguez, J. Model predictive approach for a Simple and effective load voltage control of four-leg inverter with an output LC filter. IEEE Trans. Ind. Electron. 2014, 61, 5259–5270. [Google Scholar] [CrossRef]
- Riveros, J.A.; Barrero, F.; Levi, E.; Durán, M.J.; Toral, S.; Jones, M. Variable-speed five-phase induction motor drive based on predictive torque control. IEEE Trans. Ind. Electron. 2013, 60, 2957–2968. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Zanchetta, P.; Watson, A.; Bifaretti, S.; Clare, J.C. Modulated model predictive control for a seven-level cascaded h-bridge back-to-back converter. IEEE Trans. Ind. Electron. 2014, 61, 5375–5383. [Google Scholar] [CrossRef]
- Zhang, Q.; Min, R.; Tong, Q.; Zou, X.; Liu, Z.; Shen, A. Sensorless predictive current controlled DC-DC converter with a self-correction differential current observer. IEEE Trans. Ind. Electron. 2014, 61, 6747–6757. [Google Scholar] [CrossRef]
- Tong, Q.; Zhang, Q.; Min, R.; Zou, X.; Liu, Z.; Chen, Z. Sensorless Predictive peak current control for boost converter using comprehensive compensation strategy. IEEE Trans. Ind. Electron. 2014, 61, 2754–2766. [Google Scholar] [CrossRef]
- Vu, T.; Chen, C.K.; Hung, C.W. A model predictive control approach for fuel economy improvement of a series hydraulic hybrid vehicle. Energies 2014, 7, 7017–7040. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; Yan, J.; He, H.; Wu, Y. Load Frequency control in isolated micro-grids with electrical vehicles based on multivariable generalized predictive theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G.; Morari, M. Model predictive direct torque control—Part I: Concept, algorithm and analysis. IEEE Trans. Ind. Electron. 2009, 56, 1894–1905. [Google Scholar] [CrossRef]
- Papafotiou, G.; Kley, J.; Papdopoulos, K.; Bohren, P.; Morari, M. Model predictive direct torque control—Part II: Implementation and experimental evaluation. IEEE Trans. Ind. Electron. 2009, 56, 1906–1915. [Google Scholar] [CrossRef]
- Karamanakos, P.; Pavlou, K.; Manias, S. An enumeration-based model predictive control strategy for the cascaded H-bridge multilevel rectifier. IEEE Trans. Ind. Electron. 2014, 61, 3480–3489. [Google Scholar] [CrossRef]
- Choi, D.; Lee, K. Dynamic performance improvement of AC/DC converter using model predictive direct power control with finite control set. IEEE Trans. Ind. Electron. 2015, 62, 757–767. [Google Scholar] [CrossRef]
- Lim, C.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W. A fault-tolerant two-motor drive with FCS-MP-Based flux and torque control. IEEE Trans. Ind. Electron. 2014, 61, 6603–6614. [Google Scholar] [CrossRef]
- Ramírez, R.O.; Espinoza, J.R.; Villarroel, F.; Maurelia, E.; Reyes, M.E. A novel hybrid finite control set model predictive control scheme with reduced switching. IEEE Trans. Ind. Electron. 2014, 61, 5912–5920. [Google Scholar] [CrossRef]
- Davari, S.S.; Khaburi, D.; Kennel, R. An improved FCS–MPC algorithm for an induction motor with an imposed optimized weighting factor. IEEE Trans. Power Electron. 2012, 27, 1540–1551. [Google Scholar] [CrossRef]
- Calle-Prado, A.; Alepuz, S.; Bordonau, J.; Nicolas-Apruzzese, J.; Cortés, P.; Rodriguez, J. Model predictive current control of grid-connected neutral-point-clamped converters to meet low-voltage ride-through requirements. IEEE Trans. Ind. Electron. 2015, 62, 1503–1514. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B. Model predictive decoupled active and reactive power control for high-power grid-connected four-level diode-clamped inverters. IEEE Trans. Ind. Electron. 2014, 61, 3407–3416. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Alepuz, S.; Kouro, S. Predictive control for low-voltage ride-through enhancement of three-level-boost and NPC-Converter-Based PMSG wind turbine. IEEE Trans. Ind. Electron. 2014, 61, 6832–6843. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, H.; Xue, M.; Chen, Z.; Sun, T.; Kennel, R.; Hackl, C.M. Predictive control with novel virtual-flux estimation for back-to-back power converters. IEEE Trans. Ind. Electron. 2015, 62, 2823–2834. [Google Scholar] [CrossRef]
- López, M.; Rodriguez, J.; Silva, C.; Rivera, M. Predictive torque control of a multidrive system fed by a dual indirect matrix converter. IEEE Trans. Ind. Electron. 2015, 62, 2731–2741. [Google Scholar] [CrossRef]
- Lim, C.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W. A comparative study of synchronous current control schemes based on FCS-MPC and PI-PWM for a two-motor three-phase drive. IEEE Trans. Ind. Electron. 2014, 61, 3867–3878. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Quevedo, D.E.; Silva, C. Predictive current control strategy with imposed load current spectrum. IEEE Trans. Power Electron. 2008, 23, 612–618. [Google Scholar] [CrossRef]
- Song, Z.; Xia, C.; Liu, T. Predictive current control of three-phase grid-connected converters with constant switching frequency for wind energy systems. IEEE Trans. Ind. Electron. 2013, 60, 2451–2464. [Google Scholar] [CrossRef]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation. IEEE Trans. Ind. Inf. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Vazquez, S.; Marquez, A.; Aguilera, R.; Quevedo, D.; Leon, J.I.; Franquelo, L.G. Predictive Optimal switching sequence direct power control for grid-connected power converters. IEEE Trans. Ind. Electron. 2015, 62, 2010–2020. [Google Scholar] [CrossRef]
- Song, Z.; Xia, C.; Liu, T.; Dong, N. A modified predictive control strategy of three-phase grid-connected converters with optimized action time sequence. Sci. China Technol. Sci. 2013, 56, 1017–1028. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, Z. Investigation on switching patterns of direct power control strategies for grid-connected DC–AC converters based on power variation rates. IEEE Trans. Power Electron. 2011, 26, 3582–3598. [Google Scholar] [CrossRef]
- Song, Z.; Chen, W.; Xia, C. Predictive direct power control for three-phase grid-connected converters without sector information and voltage vector selection. IEEE Trans. Power Electron. 2014, 29, 5518–5531. [Google Scholar] [CrossRef]
- Sergio, A.; Rodriguez, M.A.; Oyarbide, E.; Torrealday, J.R. Predictive direct power control—A new control strategy for DC/AC converters. In Proceeding of the IECON 2006–32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 1661–1666.
- Larrinaga, S.A.; Vidal, M.A.R.; Oyarbide, E.; Apraiz, J.R.T. Predictive control strategy for DC/AC converters based on direct power control. Ind. Electron. IEEE Trans. 2007, 54, 1261–1271. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Z.; Tian, Y.; Chen, Z.; Hu, Y. Enhanced Predictive Current Control of Three-Phase Grid-Tied Reversible Converters with Improved Switching Patterns. Energies 2016, 9, 41. https://doi.org/10.3390/en9010041
Song Z, Tian Y, Chen Z, Hu Y. Enhanced Predictive Current Control of Three-Phase Grid-Tied Reversible Converters with Improved Switching Patterns. Energies. 2016; 9(1):41. https://doi.org/10.3390/en9010041
Chicago/Turabian StyleSong, Zhanfeng, Yanjun Tian, Zhe Chen, and Yanting Hu. 2016. "Enhanced Predictive Current Control of Three-Phase Grid-Tied Reversible Converters with Improved Switching Patterns" Energies 9, no. 1: 41. https://doi.org/10.3390/en9010041