Numerous optimization approaches have been proposed for HEVs to optimize fuel economy. Dynamic programming (DP) is considered to be a global optimization method to obtain optimal results for a given driving cycle and it has been previously investigated [
4,
5]. However, DP cannot be implemented directly on a real vehicle because it is impossible to know the specific driving conditions in advance (e.g., speed, road slope, etc.). To address this problem, a stochastic dynamic programming (SDP) algorithm is proposed by establishing a driver power demand sequence over different driving cycles based on the Markov chain to obtain a state transfer matrix of the driver’s power demand [
6,
7]. However, SDP presents computational issues in real-time applications. ECMS as a real-time optimization method, was first introduced by Paganelli et al. [
8] and the corresponding optimization algorithms have been supplemented by others [
9,
10]. ECMS can be implemented online for real-time control with improved adjustability performance, closely relating to the equivalent factor, EF, which converts the motor power into equivalent fuel consumption. The calculation of EF is more challenging. Several approaches have been previously proposed to determine EF [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22]. The simplest approach is to set EF as constant value for every type of driving cycle. In [
11], optimal EF is selected for different driving cycles to achieve better fuel economy and impose charge-sustainability, but there is a need for more calibration efforts and, using this method, EF cannot be automatically adapted to the driving cycle. Another approach is to obtain the optimal EF for a given driving cycle by an iterative method or DP [
12], but this is only possible with a prior knowledge of the whole cycle and cannot be applied in a real condition due to the variation in driving cycles. Zhang et al. [
12] used DP and backward ECMS to estimate the EF for plug-in HEVs considering the upcoming terrain information. Kim et al. [
13] developed a method based on pontryagin’s minimum principle (PMP) to calculate the optimal EF and this is feasible only for a given driving cycle. In addition, one commonly used approach is to adjust the EF using a feedback controller based on state of charge (
SoC) variation at each time step [
14,
15]; however, this requires extensive computational effort and parameters of the feedback controller may be diverse for different driving cycles. Serrao et al. [
16] indicated that the PMP can be shown as the underlying optimization principle for ECMS, but online implementation is not feasible due to the number of iterations required to find the initial value of the dynamic EF for CS operation. Sezer et al. [
17] developed a new ECMS for series HEVs considering the efficiency of the engine, battery, and generator to obtain the cost map combining fuel consumption and emissions; however, this method cannot adapt to different driving cycles. Musardo et al. [
18] proposed an adaptive ECMS by estimating EF to update the control parameters under different road loads, implementing CS operation and minimizing fuel consumption. Sciarretta et al. [
19] came up with a new method to redefine EF based on the coefficient of charging and discharging of the battery. Park et al. [
20] used ECMS to distribute the power between the engine and the motor for a hybrid vehicle. To find the optimal EF for a certain driving cycle, a model-based parameter optimization method using a genetic algorithm was investigated. Simona et al. [
21] proposed an adaptation law to adjust the EF of ECMS at an interval, with the advantage of lower computational burden. Han et al. [
22] used DP to extract the optimal EF for the whole driving cycle and designed the dynamic EF adaptation algorithm under hilly road conditions. Kessels et al. [
14] proposed an online energy management system for parallel HEVs using a PI controller to adjust the EF in real-time to obtain a charge-sustaining solution. Feng et al. [
23] presented a PI controller applied in ECMS to track the
SoC reference and determine the power-split for plug-in HEVs. Adaptive ECMS was deployed to implement
SoC tracking during the whole driving cycle. Ambuhl et al. [
24] also used a PI controller to adjust the EF in ECMS for HEVs, but they did not describe how to choose the parameters of the PI adaptation law. Moreover, the parameters of the PI adaptation law may be different for diverse driving cycles. In [
25], a PI feedback controller was designed to adapt online the emissions and
SoC to track the NO
x emissions and implement the charge-sustaining causal control.
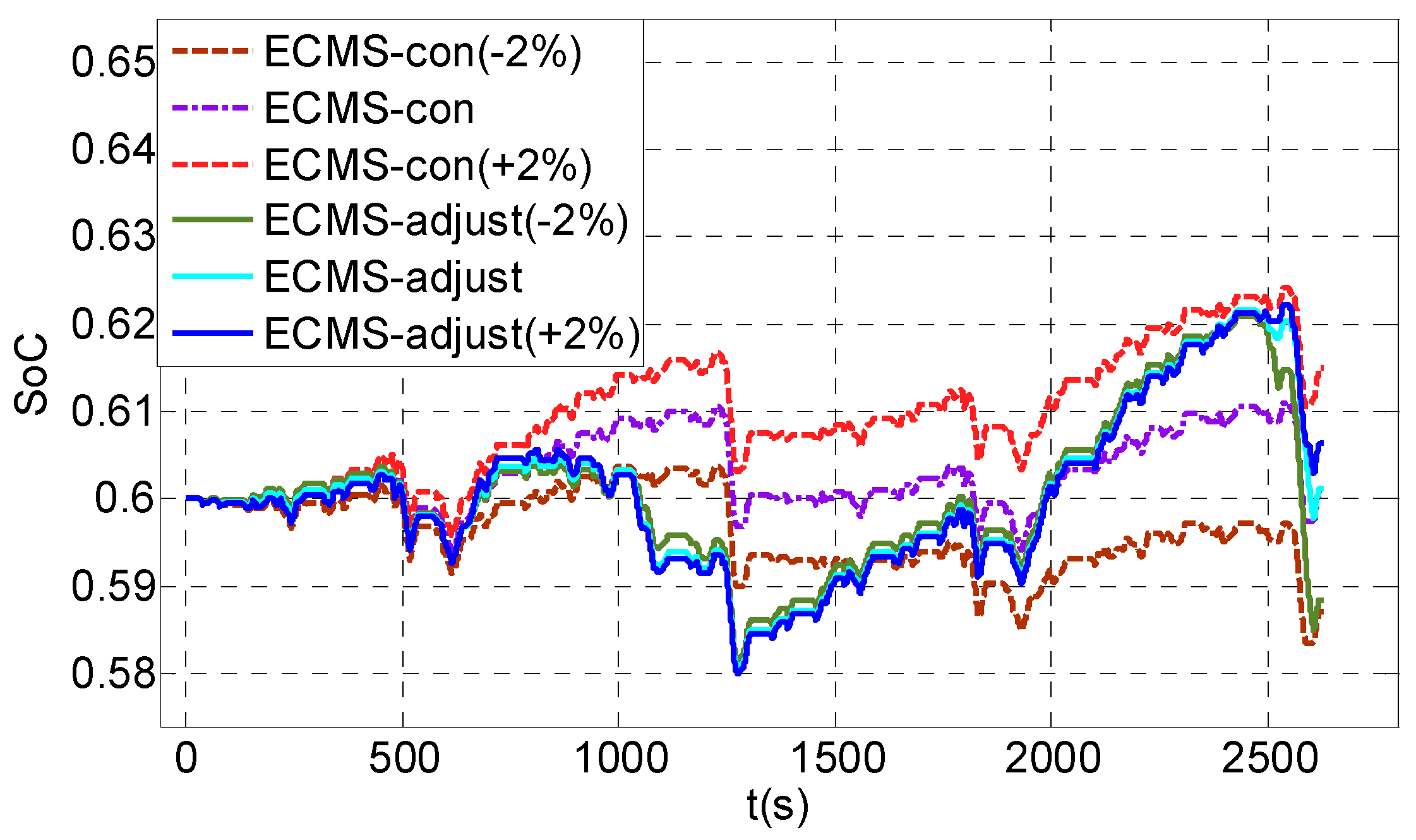
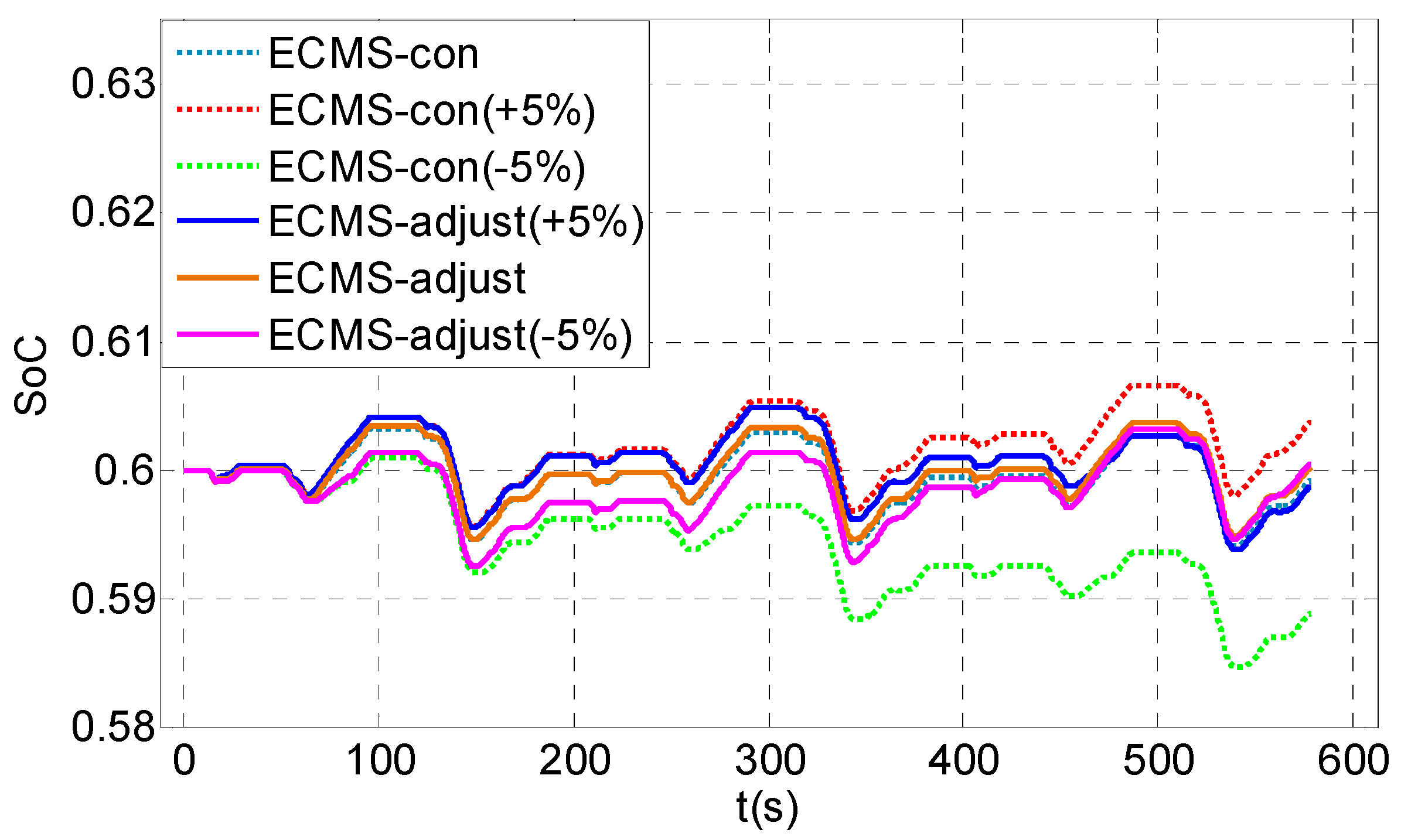
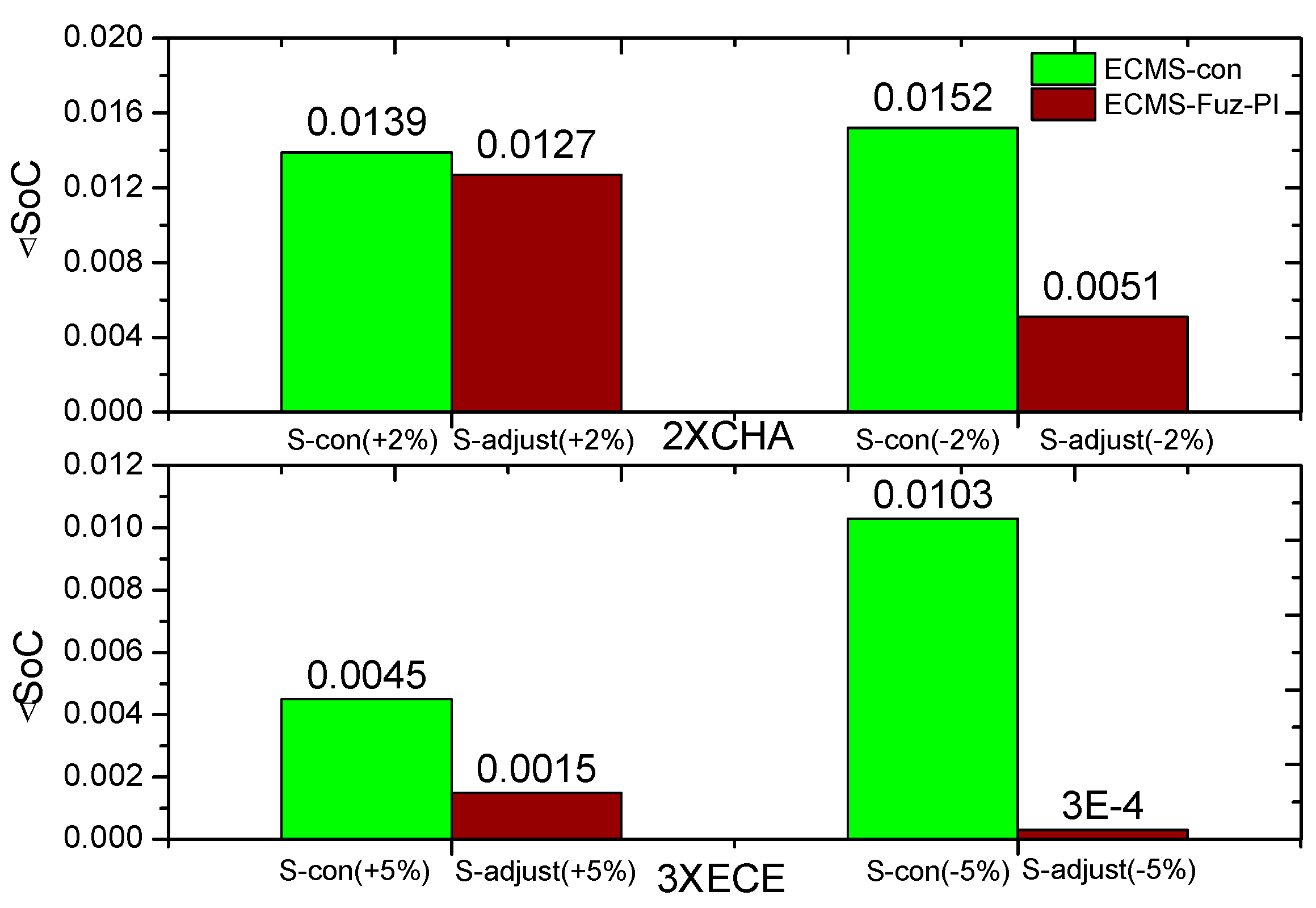
However, the robustness of the adaptation law of ECMS to the deviation of EF and driving cycle has not been considered among these approaches. In fact, the performance of ECMS is sensitive to variations in EF and driving cycle, especially for the charge-sustainability HEVs. The optimal EF for one driving cycle cannot be applied in another driving cycle. Thus, it is important to adjust EF in real-time to attain charge-sustainability for HEVs due to the error between optimal EF and estimated EF.
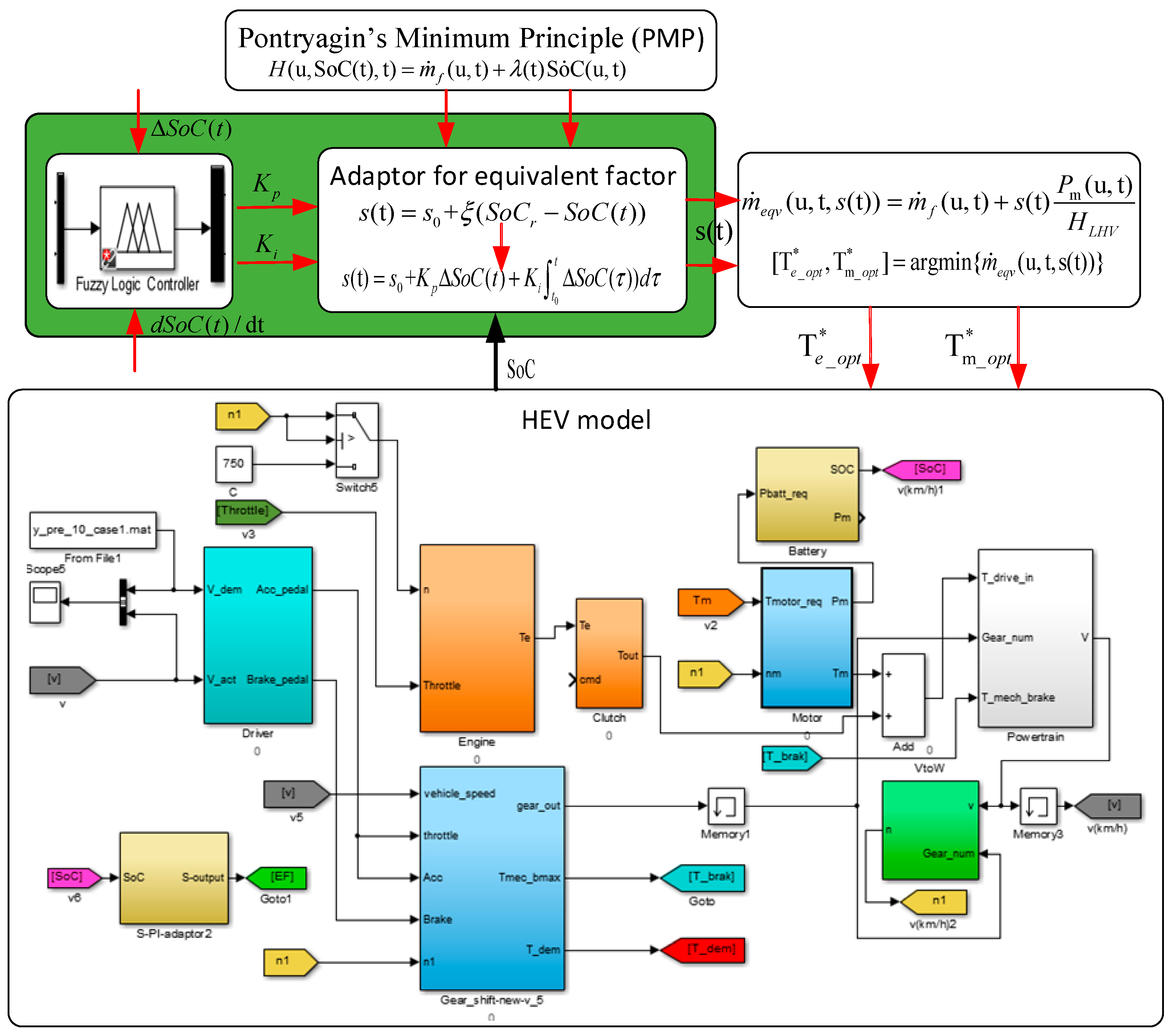
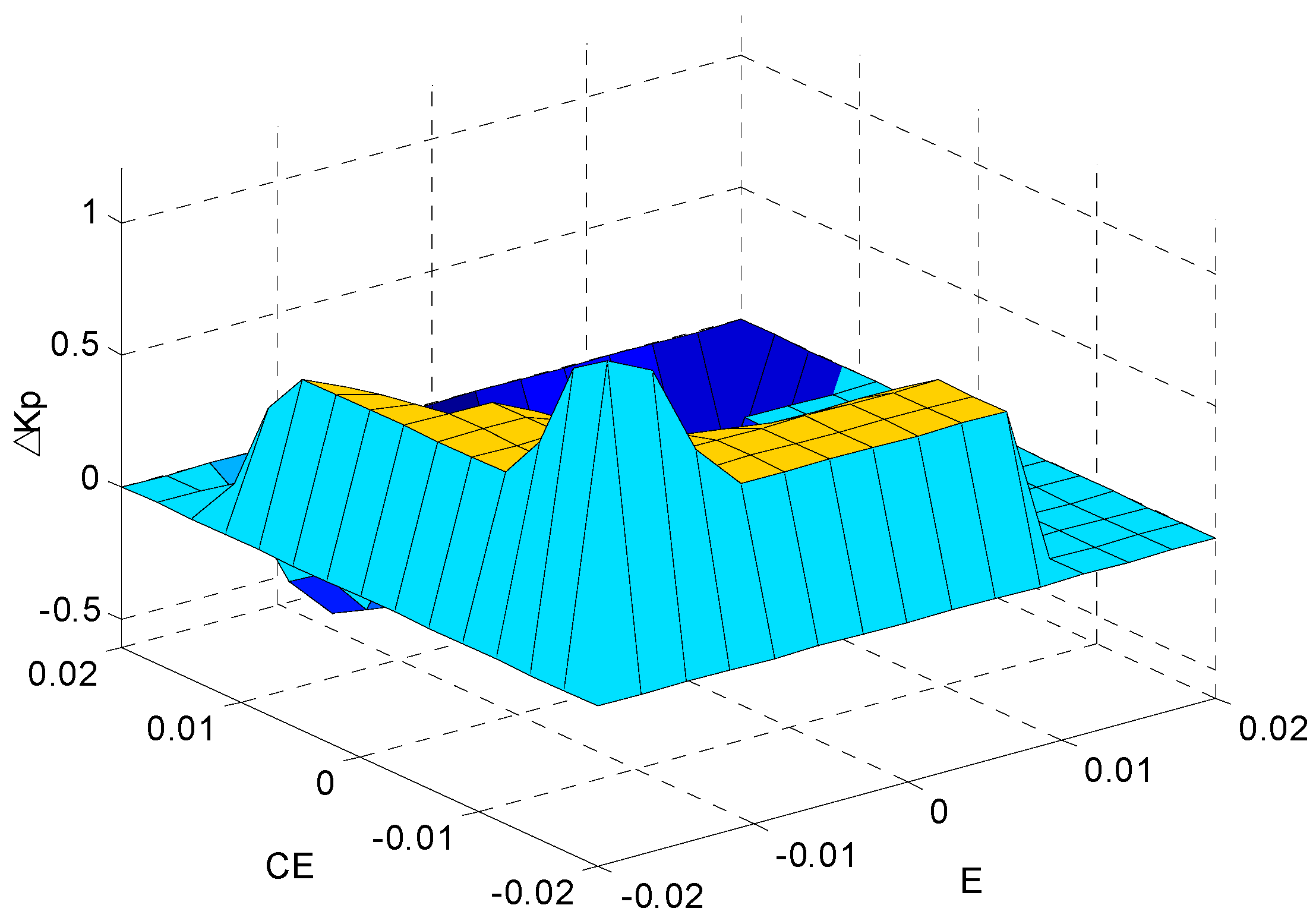
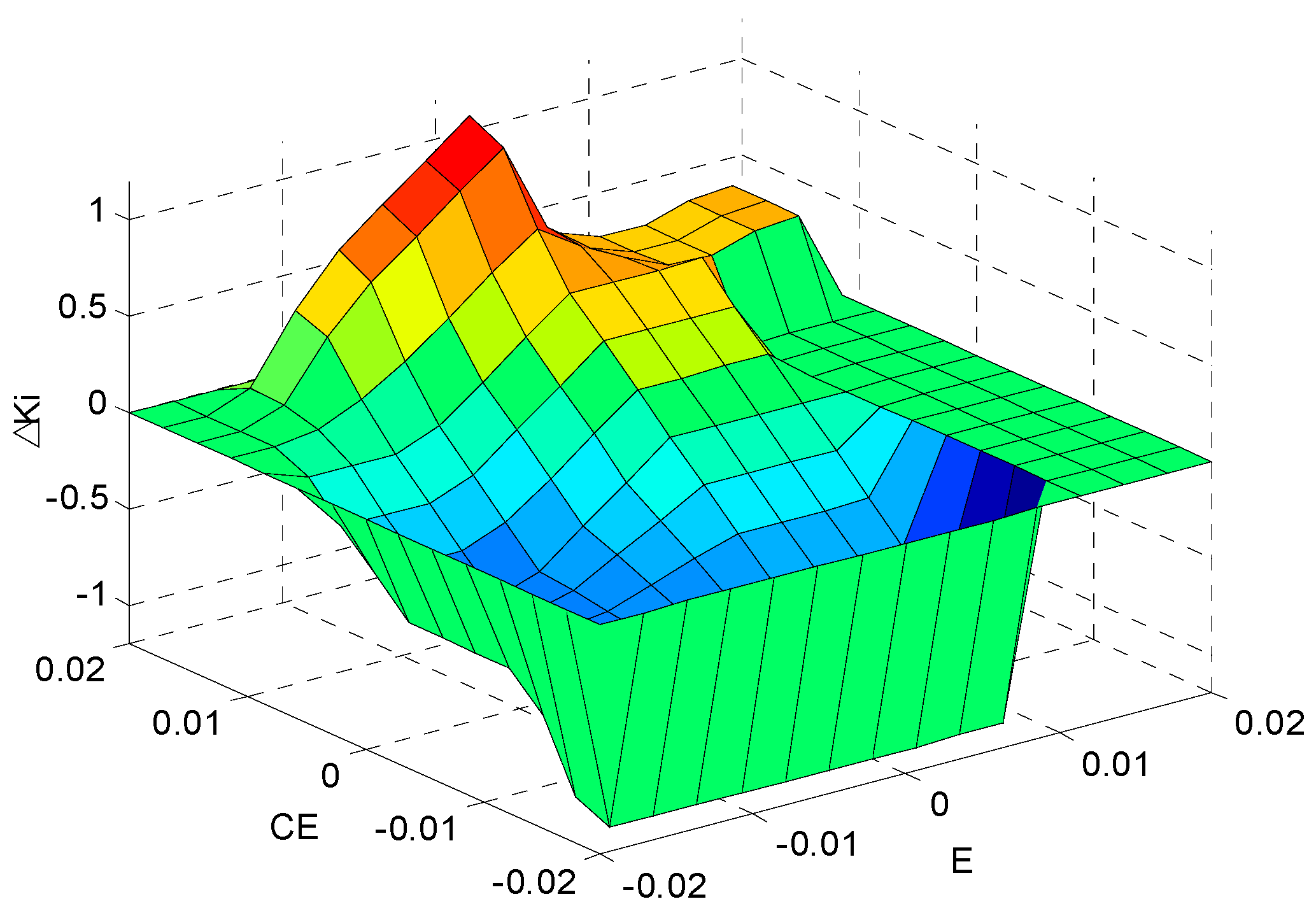
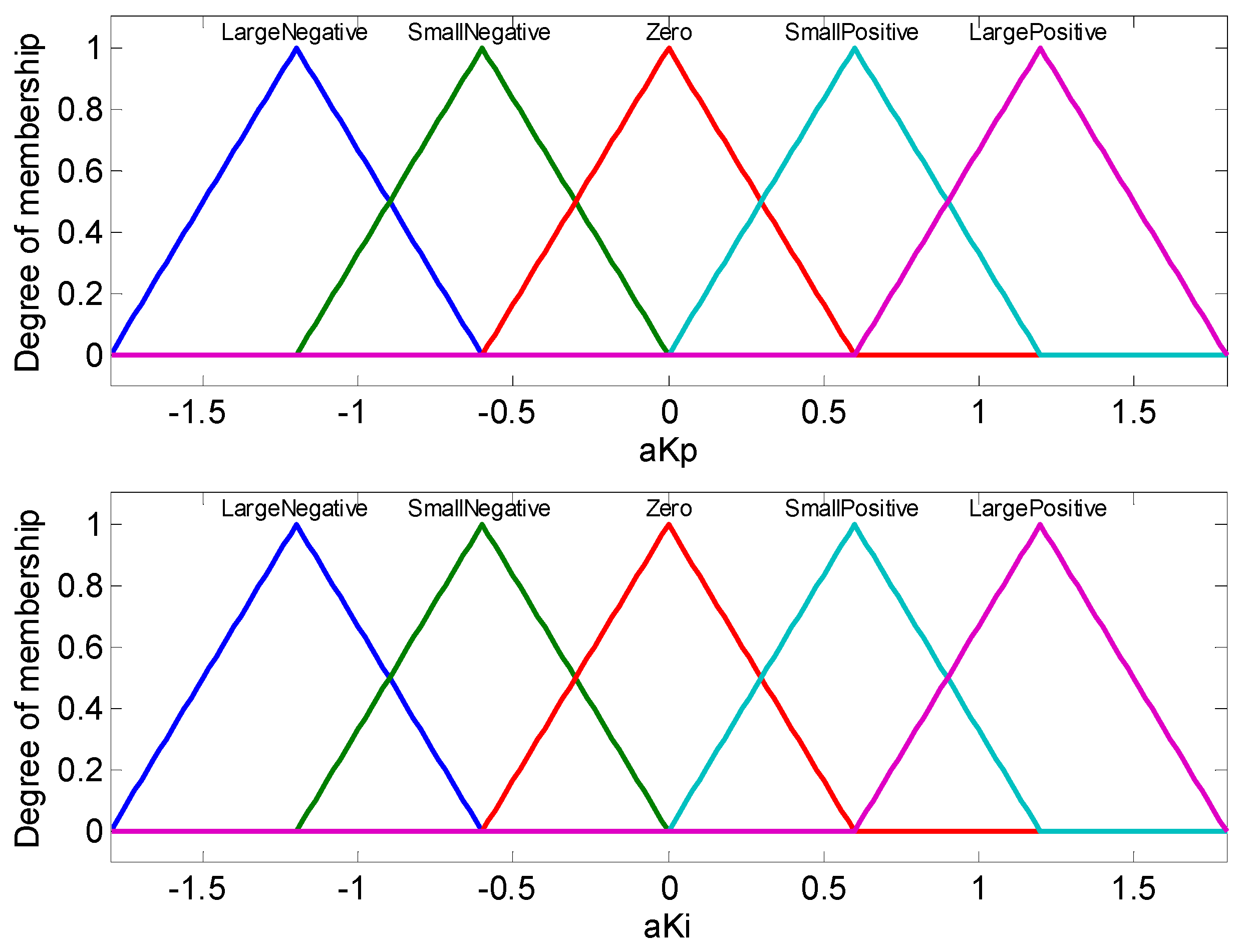
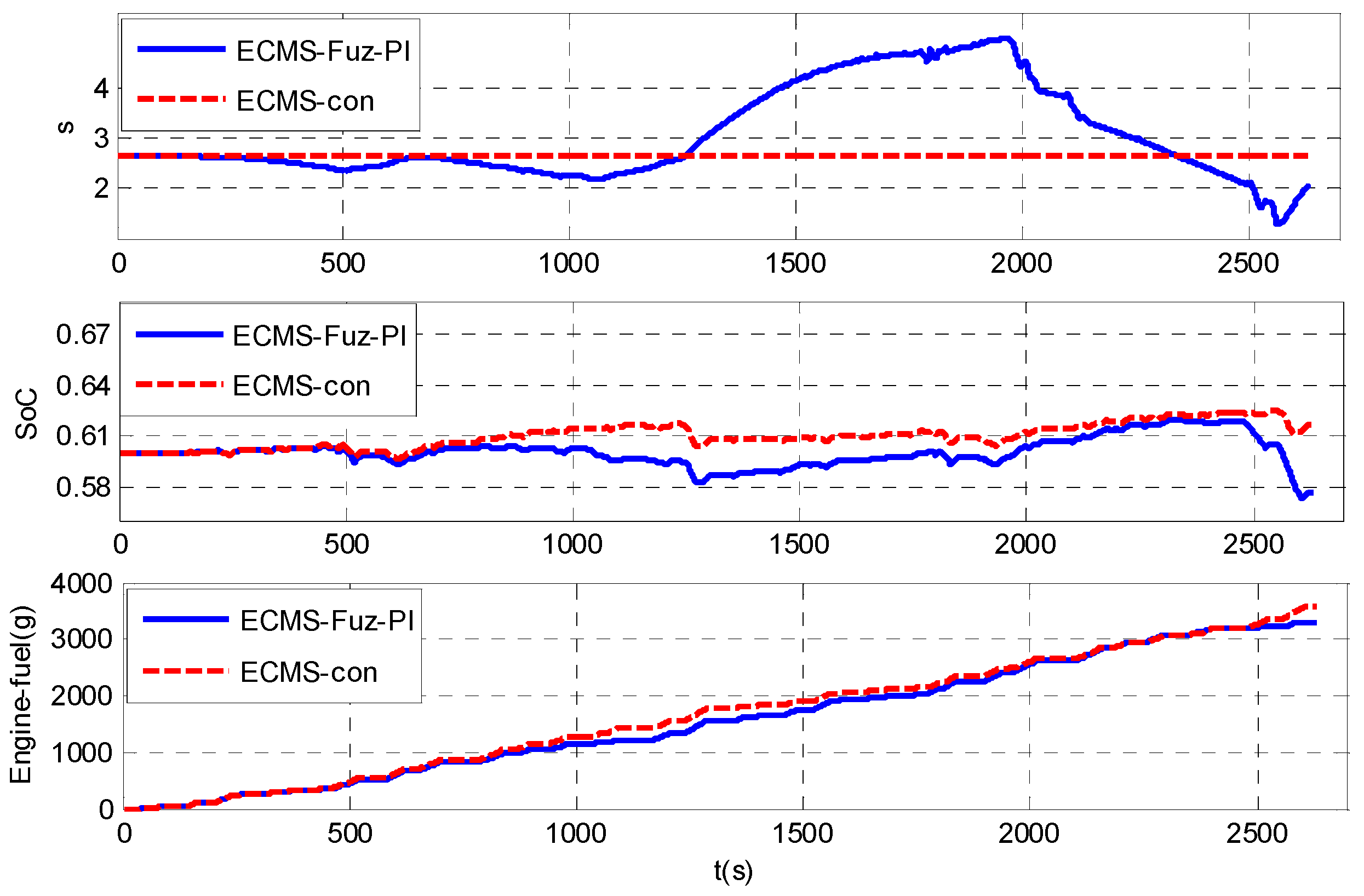
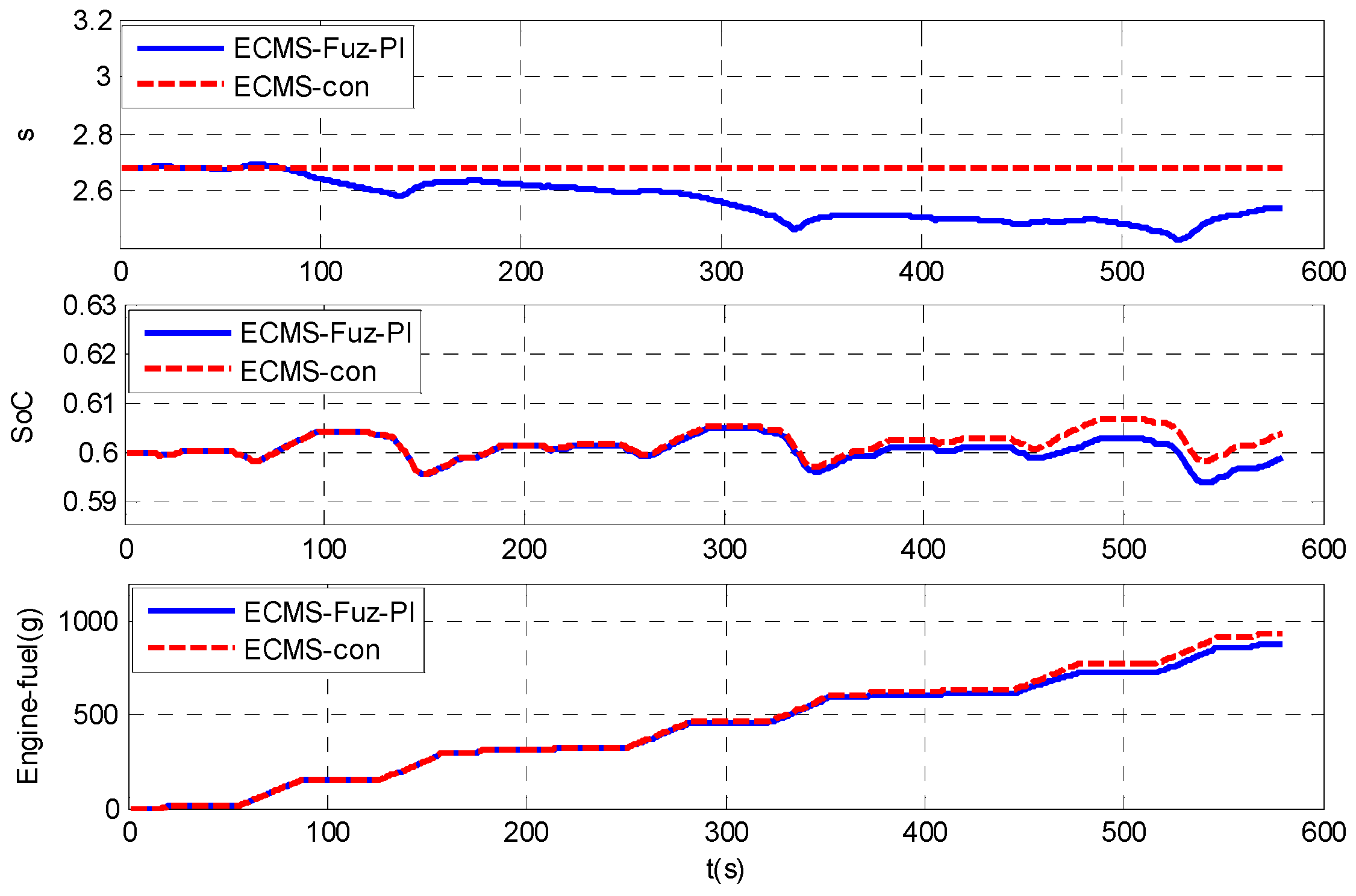
In light of this, an adaptive ECMS is proposed to improve the adaptability using a new adaptation law for different driving cycles in this paper. First, the relationship between EF of ECMS and co-state of PMP is given. Second, a new adaptation law is derived to tune the EF using a fuzzy PI controller to impose charge-sustainability and enhance robustness. The parameters of the PI are tuned dynamically by a fuzzy logic controller to improve the robustness of the adaptation law in ECMS. To our best knowledge, the second finding in this study (the adaptation law) is believed to be an original contribution. Finally, simulation results over different driving cycles are evaluated to demonstrate the effectiveness of the proposed energy management strategy compared with a rule-based control strategy. Three control strategies, namely ECMS with Fuzzy PI adaptation law, ECMS with PI adaptation law, and ECMS with constant EF, are also investigated in terms of SoC charge-sustainability and fuel economy.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}