This section summarizes the formulation of the proposed robust UC. It is important to note that this approach is suitable for power systems with cost-based economic dispatch like in most Latin American countries.
3.1. Hedging against VGT Power Fluctuations
The previously described scenario generation approach enables TSOs to plan for a set of scenarios that take into account the inherent uncertainty of VGTs. The next phase is to use a mathematical model to incorporate these scenarios to optimize the UC decision. For such purposes, the strategy proposed by Álvarez-Miranda et al. [
17] is used. This modeling tool relies on an extension of the concept of budget of uncertainty originally proposed by Bertsimas and Sim [
19]. The main difference is that the model of uncertainty provided in Bertsimas and Sim [
19] corresponds to intervals, while the model of uncertainty proposed by Álvarez-Miranda et al. [
17] corresponds to a set of scenarios, and each of them associates intervals.
For the sake of simplicity, the remainder of this section considers wind power generation as unique VGT. However, the proposed model can easily be extended to other types of VGT.
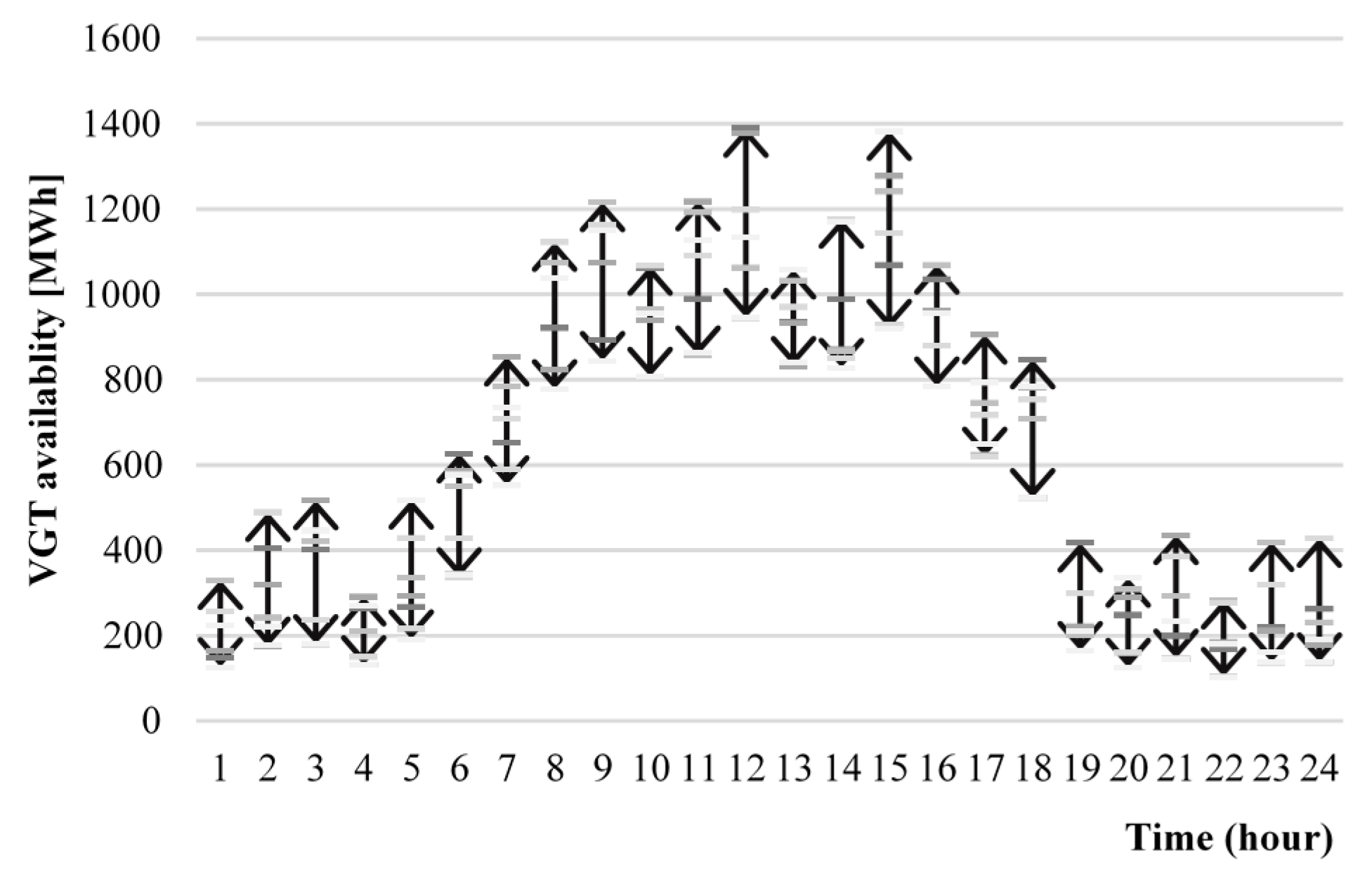
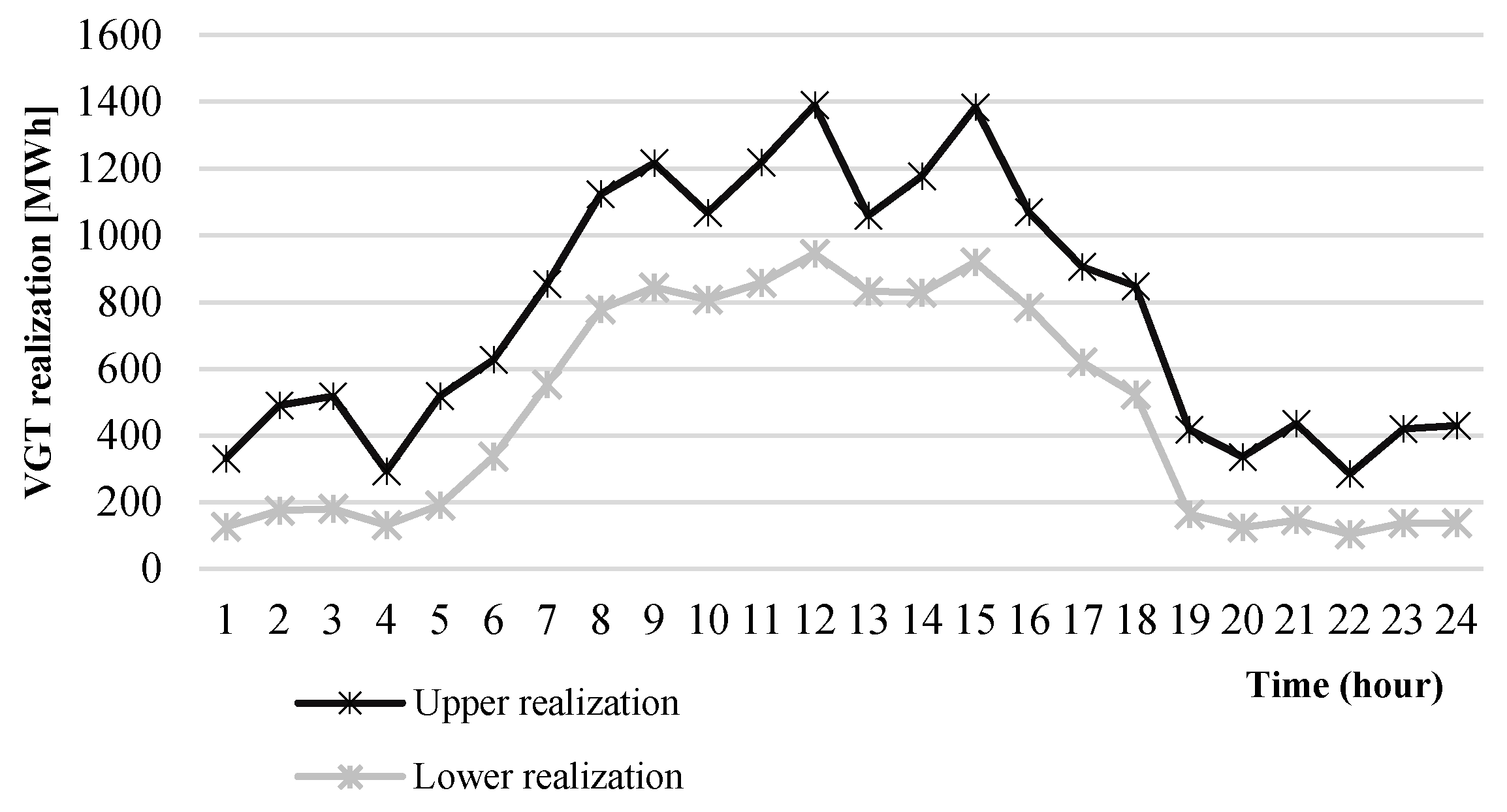
Recall that is a generic day (or set of days) divided into periods. Let be a set of scenarios (), so that for a given scenario and for a given period , there is an interval [] (with midpoint ). From the power generation point of view, an optimistic data realization is such that the actual wind power is ; on the contrary, a pessimistic one is .
Suppose that a decision-maker is able to translate her/his level of conservatism against uncertainty through a pair
; where
is the
maximum number of periods that the wind-power is at the upper limit, and
is the
minimum number of periods that the wind-power is at the lower limit. If
, it means that the TSO assumes that the wind-power values at all periods will be at the corresponding midpoints; if
and
, then
can take any value within [
]; if
(and regardless of the value of
), then wind-power values will be set at the lower bounds. In practice, parameters
and
allow TSOs to obtain solutions that are protected against scenarios with large fluctuations from the midpoints. This translates into a protection against the uncertainty and variability of wind power. The common setting considers only one parameter
(see, e.g., [
14,
19]), which in this context would correspond to
. One can see that
controls the level of
conservatism, while
controls the level of
optimism.
In addition to the aforementioned notation, let
be the set of buses, and
be the set of generators at bus
. Now, let
, be a vector of real-valued variables such that
corresponds to the
actual wind-power (in
) injected at bus
in period
, if scenario
is realized. For simplicity, let
and
. In addition, the auxiliary variables
and
are needed. These variables are such that if
and
, then the wind-power injection at bus
, at a given period
and for a given scenario
, is at its upper limit
. Likewise, if
and
, then the wind-power is at its lower limit
; and if
, then the wind-power is at its midpoint
. Variables
,
and
are related by the following inequalities:
Consequently, for a given scenario
, the corresponding
uncertainty set is given by:
This uncertainty set, which is shaped by the pair , is embedded into the mathematical optimization model presented next.
3.2. MILP Formulation for the TSRUC
In the following, the Mixed Integer Linear Programming (MILP) formulation for the two-stage RUC is presented.
3.2.1. Parameters
is the start-up cost for generator at bus ; is the shutdown cost for generator at bus ; is the minimum time that generator , at bus , must be operating after it is turned on; is the minimum time that generator , at bus , must be down after it is turned off; is the ramp-up limit for generator at bus ; is the ramp-down limit for generator at bus ; is the minimal output of electricity if generator at bus is on ; is the maximum output of electricity if generator at bus is on ; and is the total demand on the system in period (including an estimation of the system losses).
3.2.2. First-Stage Variables
, binary variables such that if generator at bus is on in period , and otherwise; , binary variables such that if generator at bus is started up in period , and otherwise; , binary variables such that if thermal generator at bus is shut down in period , and otherwise. These first-stage variables allow us to define today which generating units will be operating, and for how long, tomorrow. Note that, for practical purposes, variables are also defined for .
3.2.3. Second-Stage Variables
, real-valued variables such that corresponds to the amount of power generated by generator at bus in period , if scenario is realized ; , real-valued variables such that corresponds to the amount of primary reserve of generator at bus in period , if scenario is realized ; and (resp. ), real-valued variables such that (resp. ) corresponds to the amount of positive (resp. negative) secondary reserve sustained by generator at bus in period , if scenario is realized . Second-stage decisions define the so-called dispatching problem, i.e., how much energy will be produced tomorrow by each of the committed units.
The goal of the mathematical optimization setting is to find a cost-efficient one-day-ahead operation policy, i.e., a UC schedule for tomorrow, such that it minimizes a worst-case measure of the operating cost of the second-stage decisions.
Any feasible unit schedule must respect the typical time coupling constraints related to the minimum up and down times of the SGs: (i) if a unit
at bus
is turned on, then it must remain in that state for at least the minimum-up time
; (ii) if a unit
at bus
is shut down, then it must remain in that state at least the minimum-down time
. These two constraints, plus the nature of the variables, are modeled as follows:
Constraints (6) and (7) model the two operating constraints described above. Constraints (8) and (9) relate variables , and . Constraint (10) defines the boundary conditions for any feasible unit scheduling and constraint (11) requires that all first-stage variables be binary.
3.2.4. Reserves
Along with Constraints (6)–(11), a conventional cost-based economic UC model includes primary and secondary reserve requirements. Let
be a function indicating the amount of primary reserve required at each period; let
be the maximum portion of the nominal capacity of the generators that can be used for primary reserve. Likewise,
(resp.
) represents the amount of positive (resp. negative) secondary reserve required at each period. The amount of operating reserve at each period depends on the practices of the pertinent TSO and on characteristics of the system. The quantification of the operating reserves is done in order to cope with wind power variability and uncertainty, and also with demand fluctuations. Considering this, the constraints that ensure the operating reserves of the system for a given scenario
are given by:
Constraints (12) and (13) ensure the feasibility of both the dispatched power and operating reserves. Constraints (14) and (15) enforce the primary reserve. Finally, constraints (16) and (17) model the positive and negative secondary reserves, respectively.
3.2.5. Dispatch Problem
Without loss of generality, we will assume that the generation cost of a generator
, at bus
, in period
, and in scenario
, is given by a piecewise linear function
. Thus, for a given feasible scheduling encoded by a collection
satisfying (6)–(11), a pair
, and a scenario
, the corresponding second-stage dispatching problem is given by:
The objective Equation (18) aims to find the minimum cost of the dispatch of the SGs. Constraint (19) ensures that if a generating unit is operative, then it must produce at least and at most . Constraints (20) and (21) correspond to the up and down ramp constraints, respectively. Constraint (22) indicates that the total generated power, including the used wind-power, must satisfy the demand (and the expected losses) in every period. Constraints (23) and (24) ensure the technical correctness of the solution, and constraint (25) characterizes the nature of the second-stage variables. Although transmission constraints are not considered, they could be easily included in the formulation. This was done because the main focus of this work is to include frequency stability constraints in the UC problem.
3.2.6. RUC
For a given first-stage solution
, the
robust dispatching cost corresponds to the maximum (minimum) dispatching cost among all
, i.e.,
Combining the aforementioned constraints and definitions, the RUC is formally defined as:
Regardless of which scenario is actually realized, an optimal first-stage scheduling can be categorized as robust if it displays the following three characteristics: (i) it is economically efficient (due to the minimization of the worst case); (ii) it is protected against fluctuations of wind-power (which is possible due to the combined effect of ); and (iii) it is reliable with respect to possible errors in the wind-power forecasting (due to the tailored procedure to generate forecast data).


 and
and 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}