
Design and Analysis of Jacket Substructures for Offshore Wind Turbines



Abstract
:1. Introduction
2. Design and Specification of Jacket Substructures
2.1. Basic Information for Design
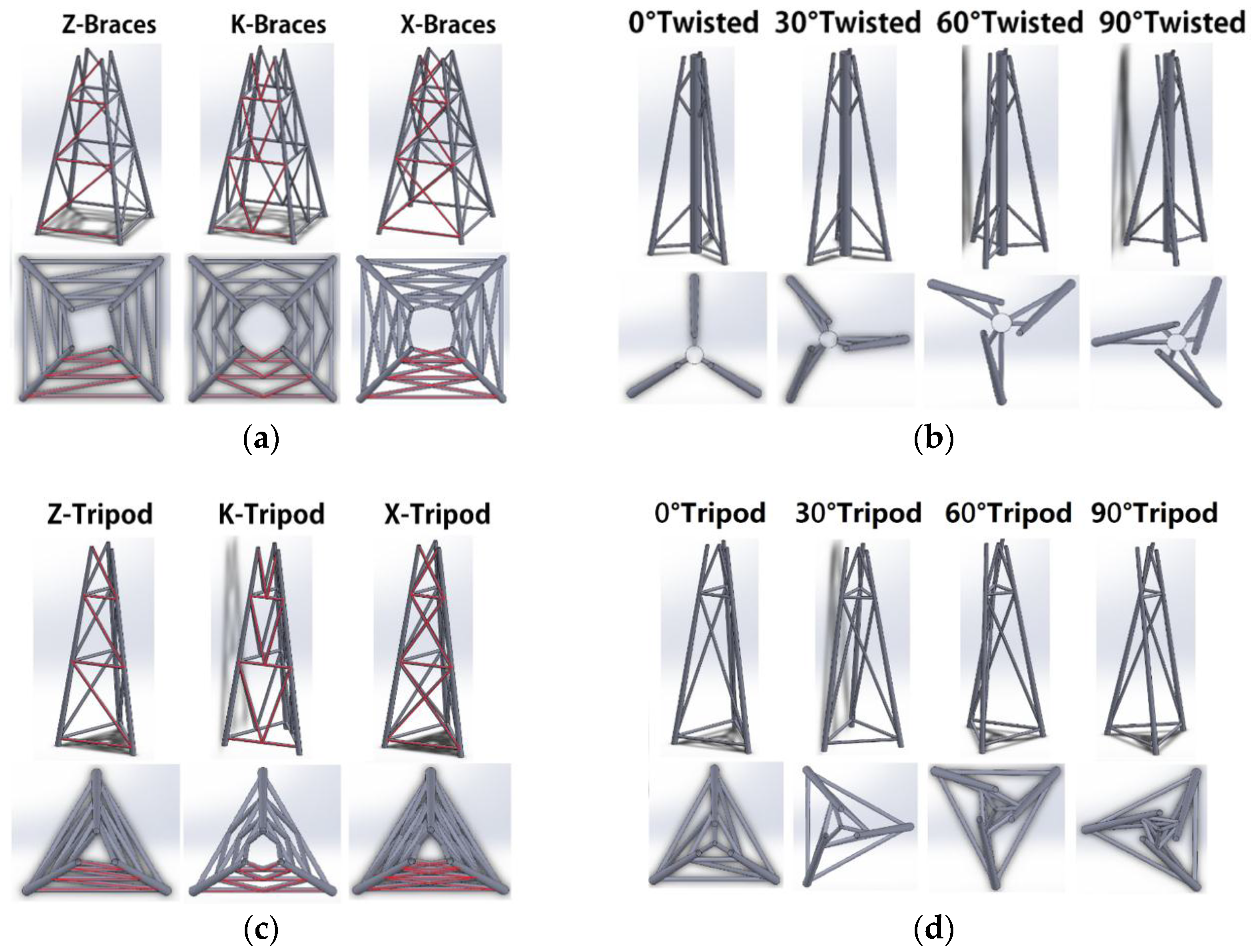
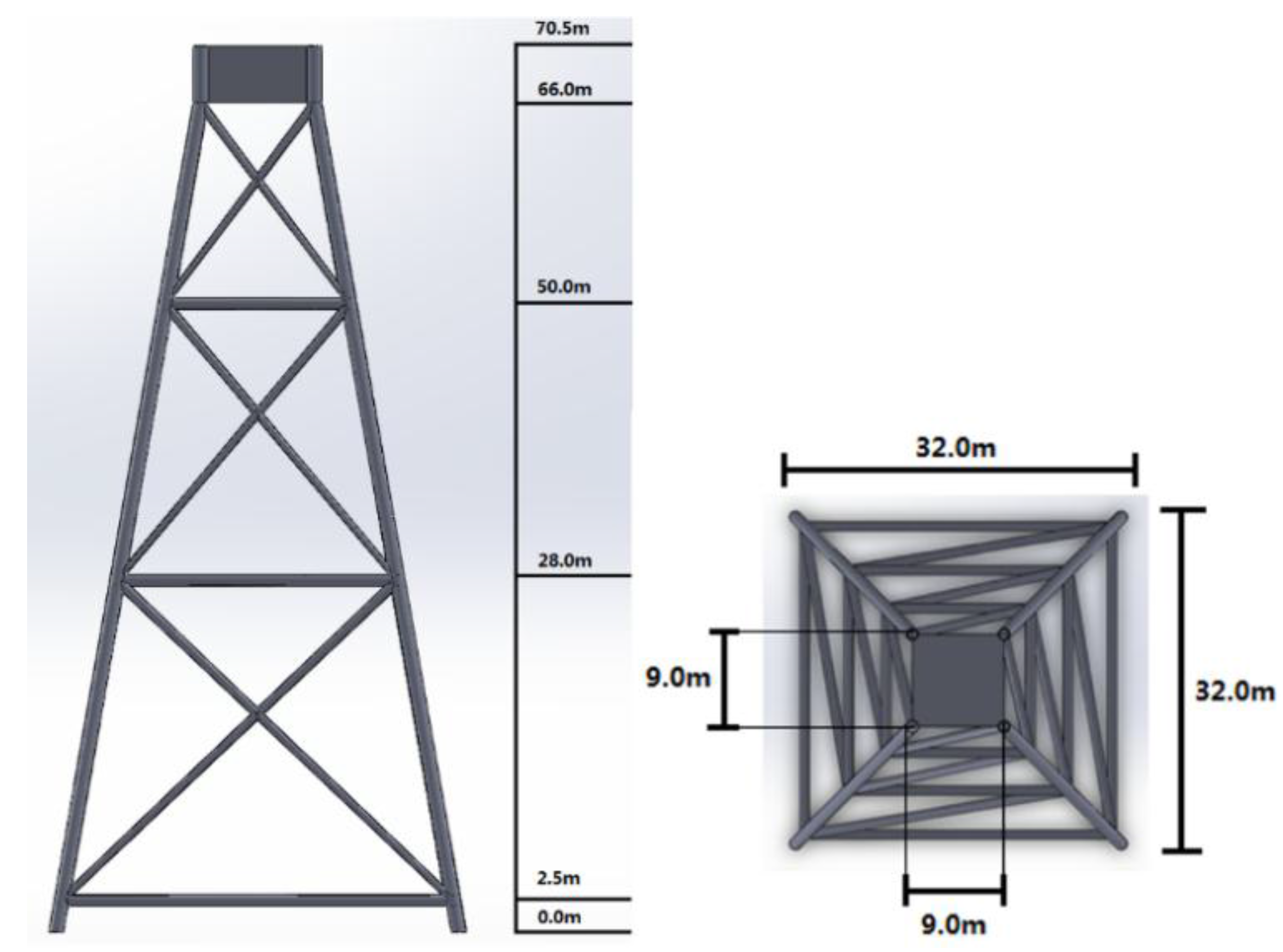
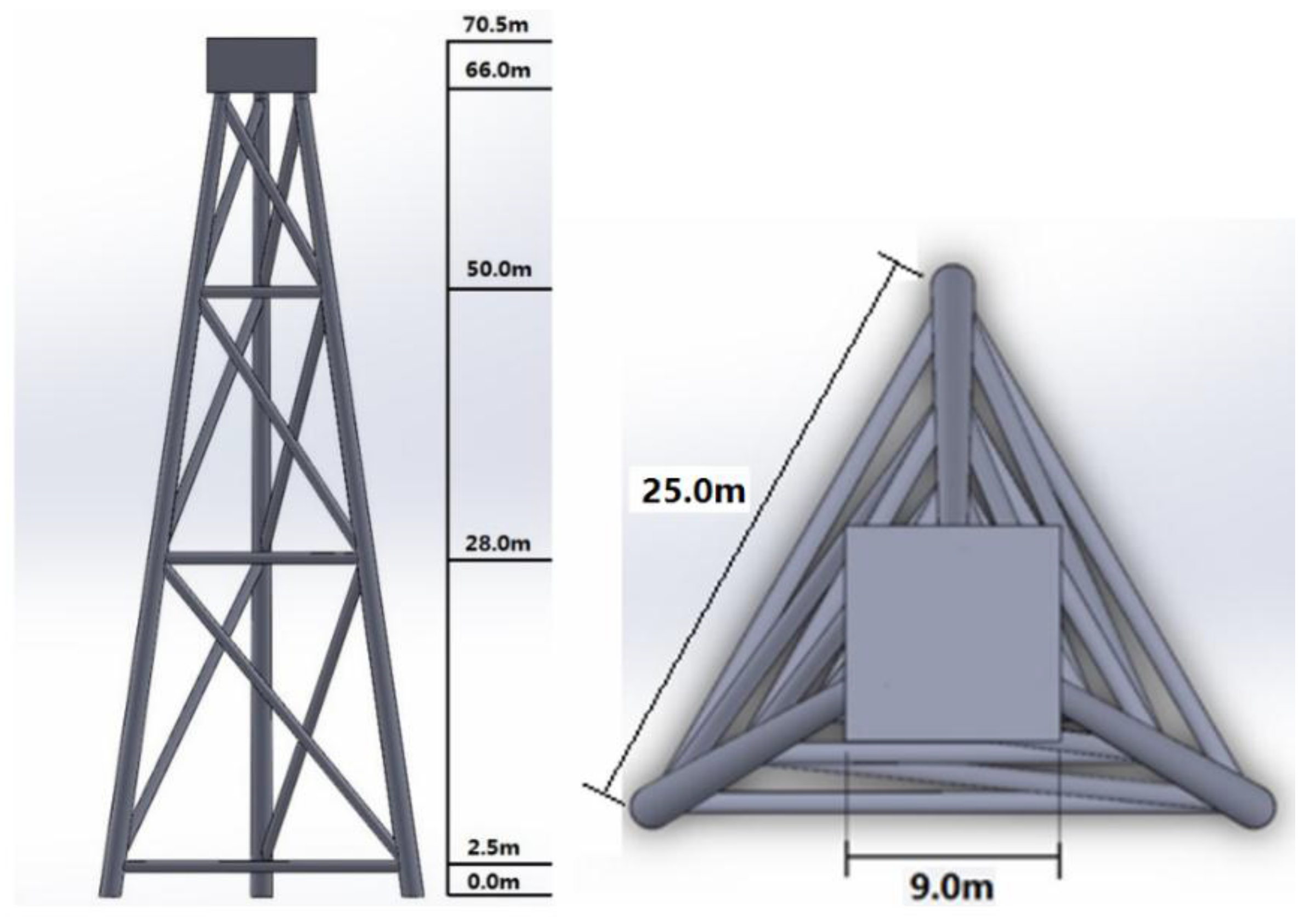
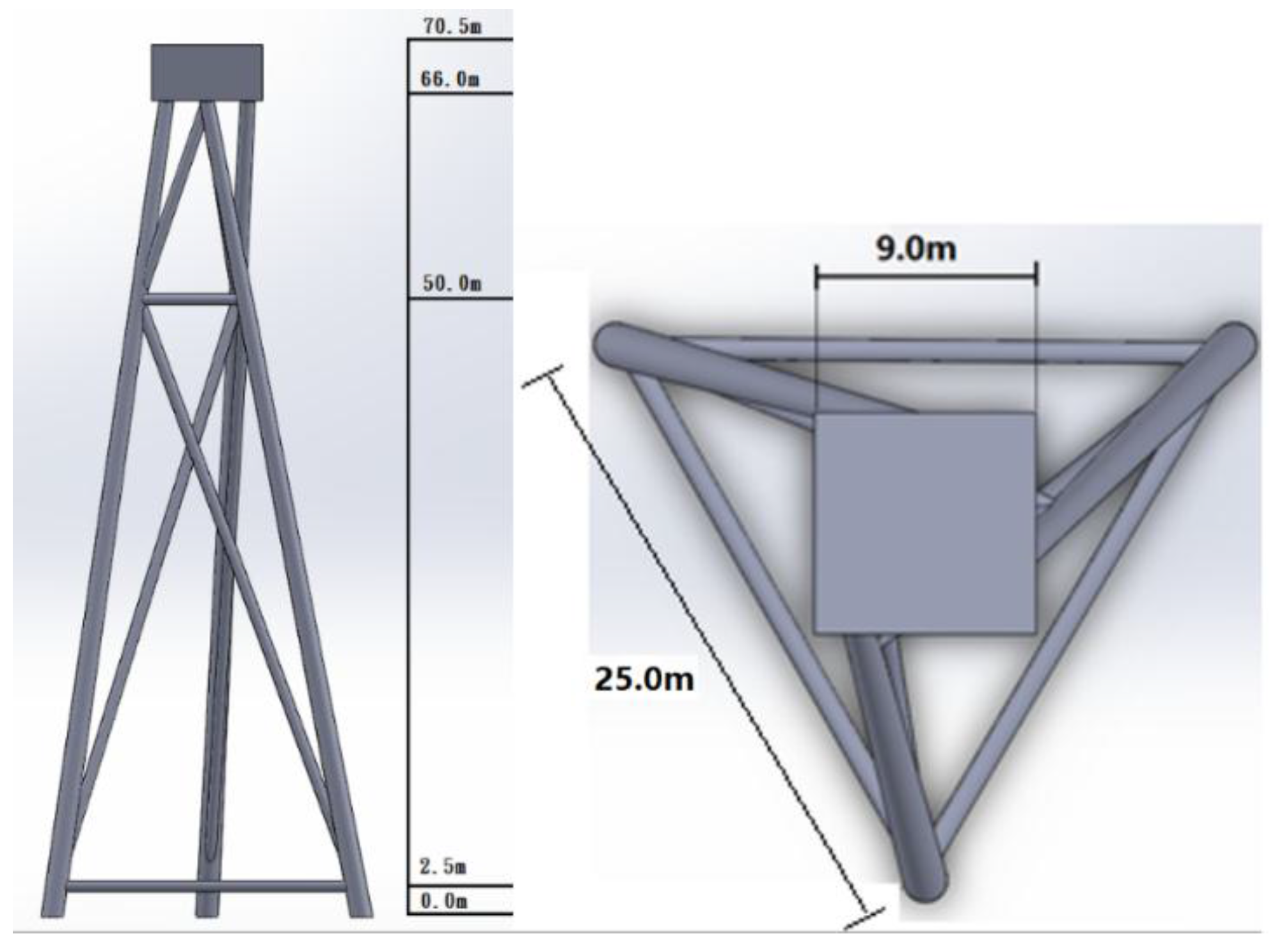
2.2. Dimensions of Jacket Substructures
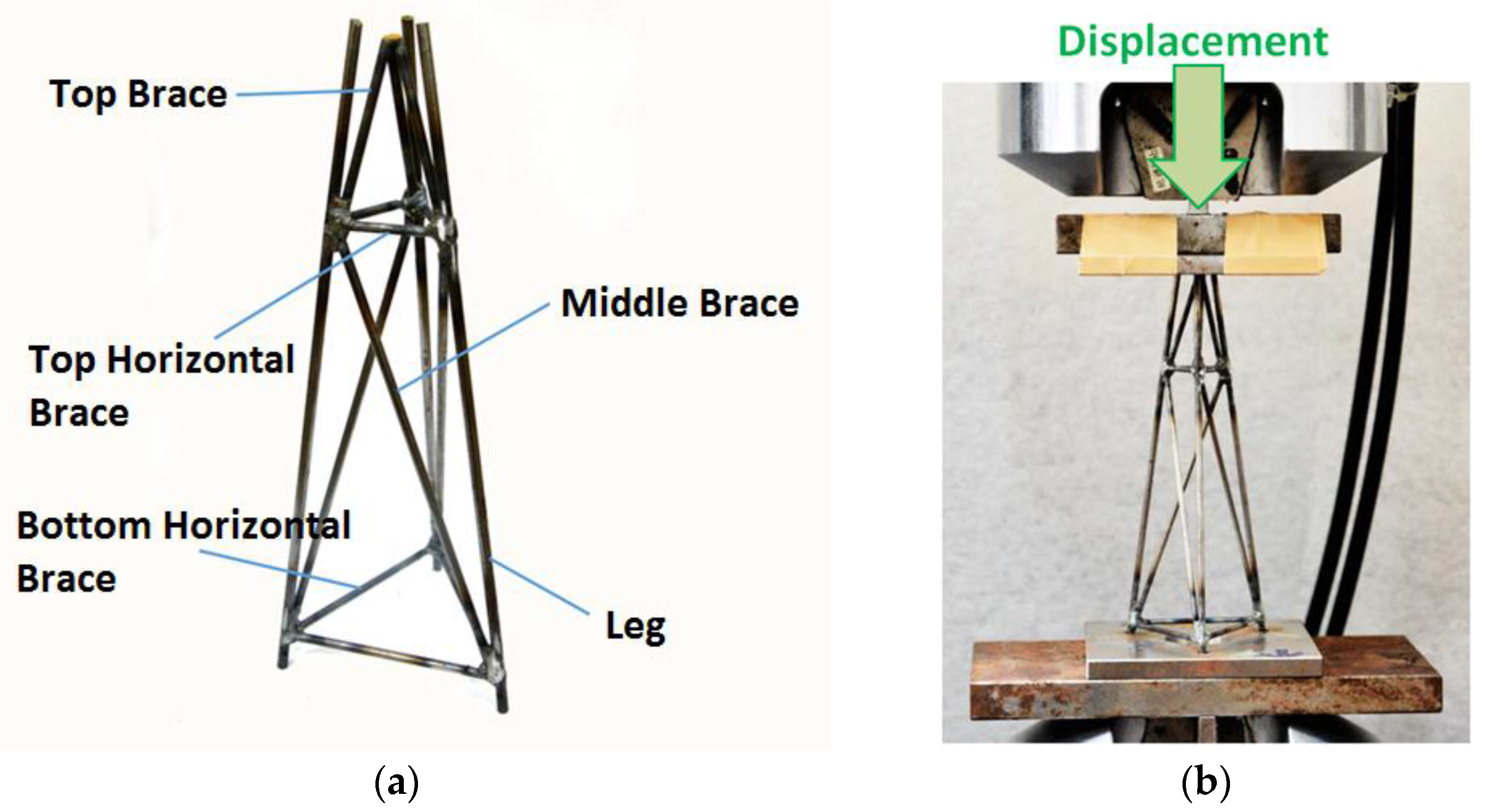
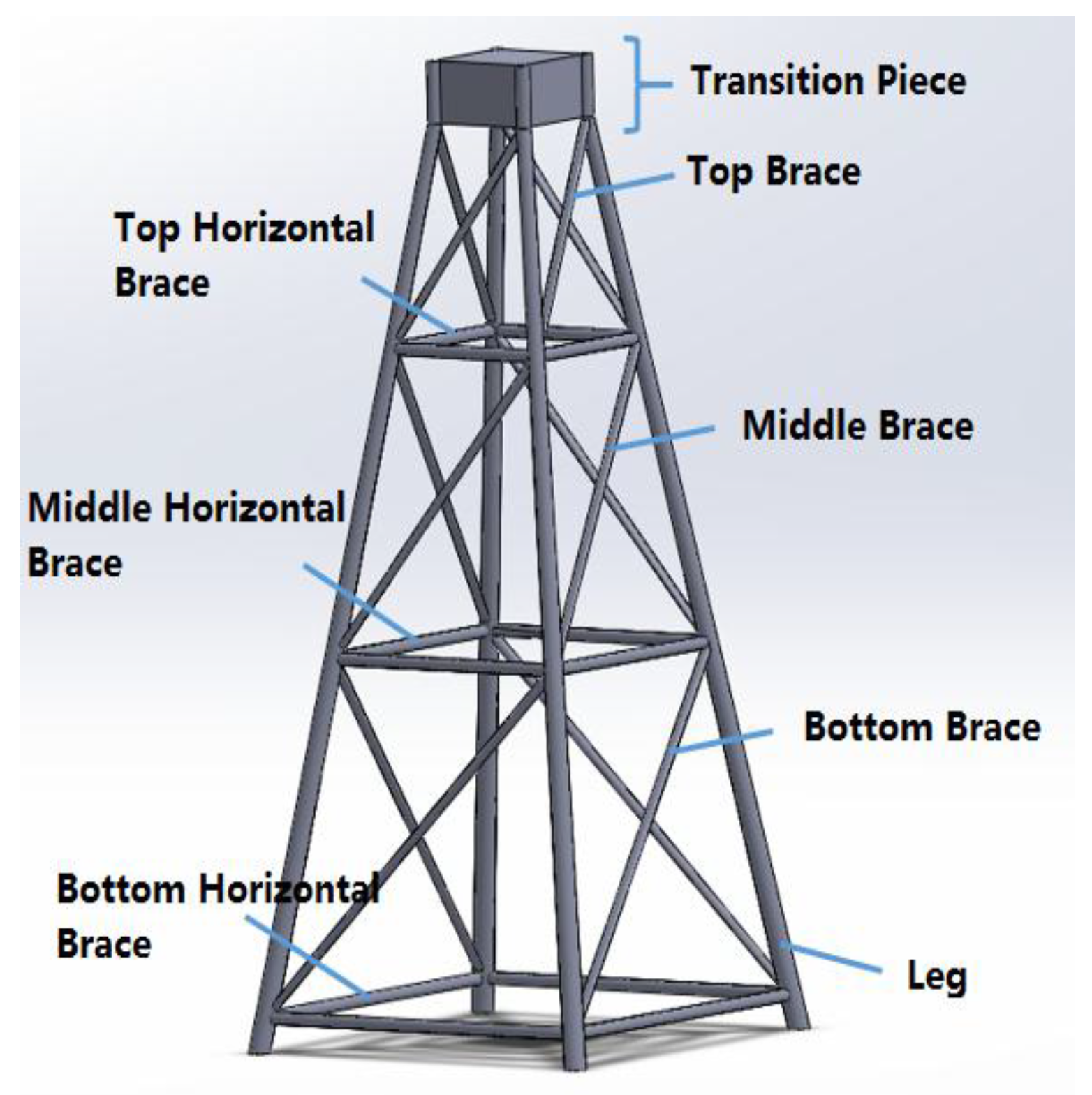
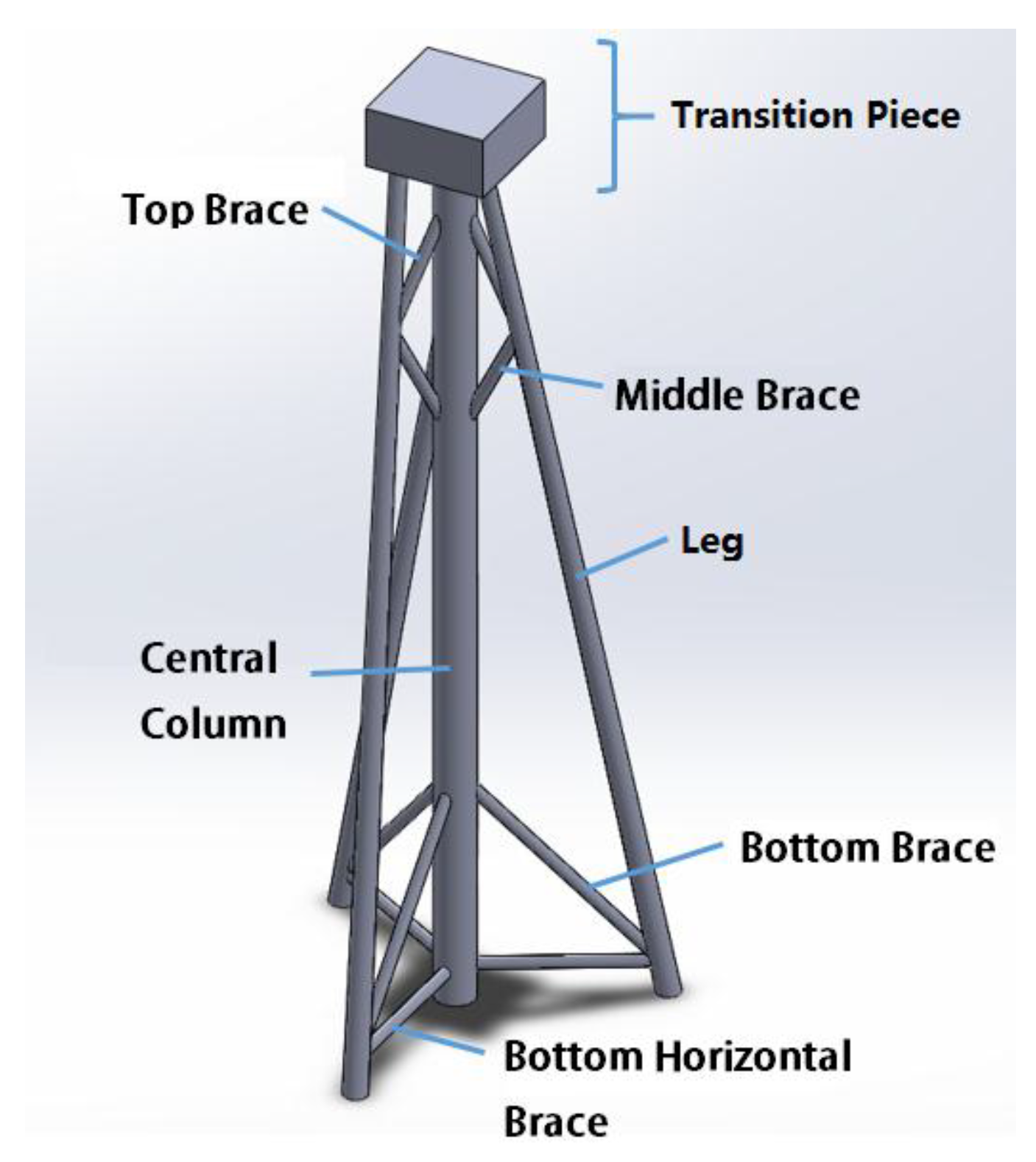
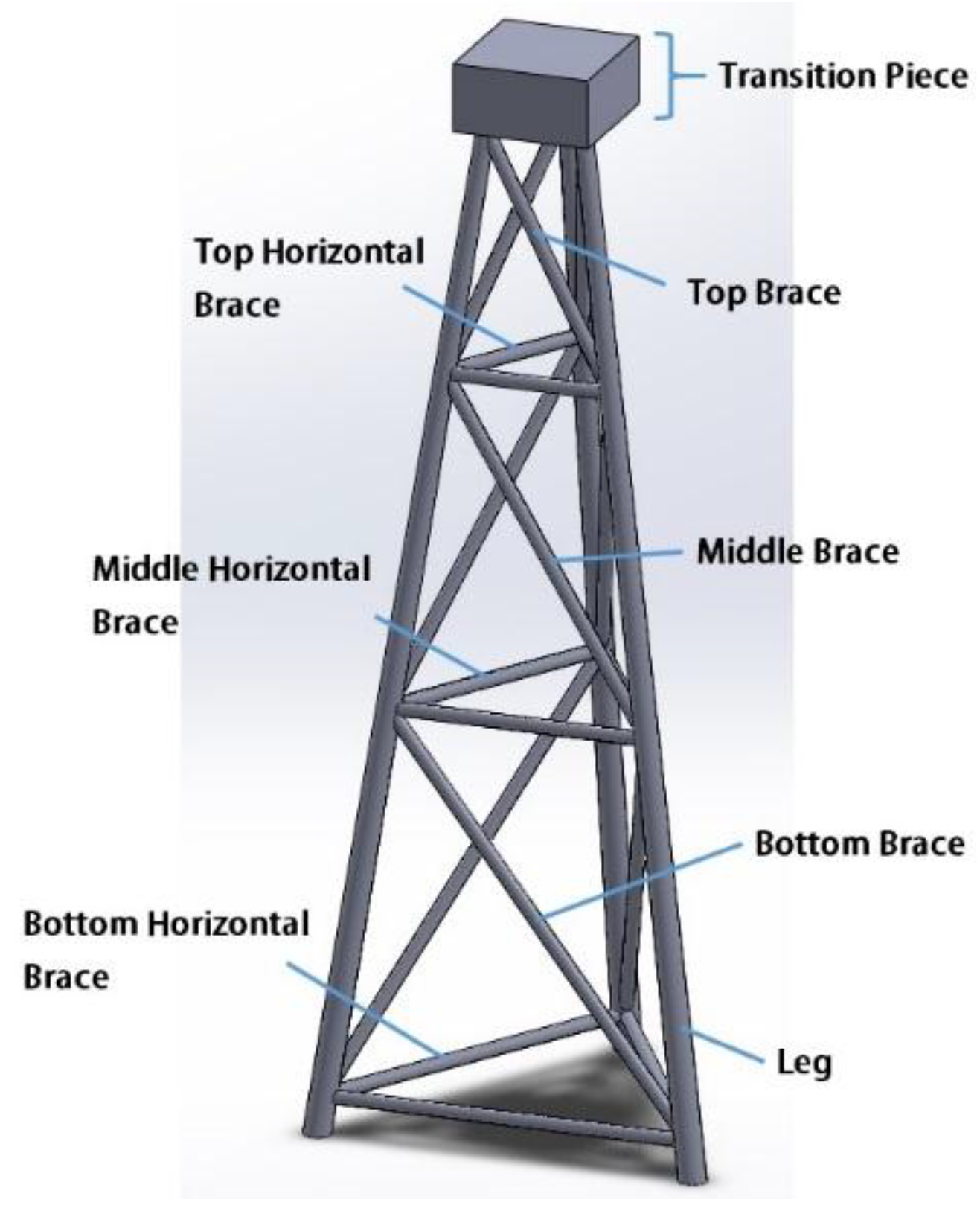
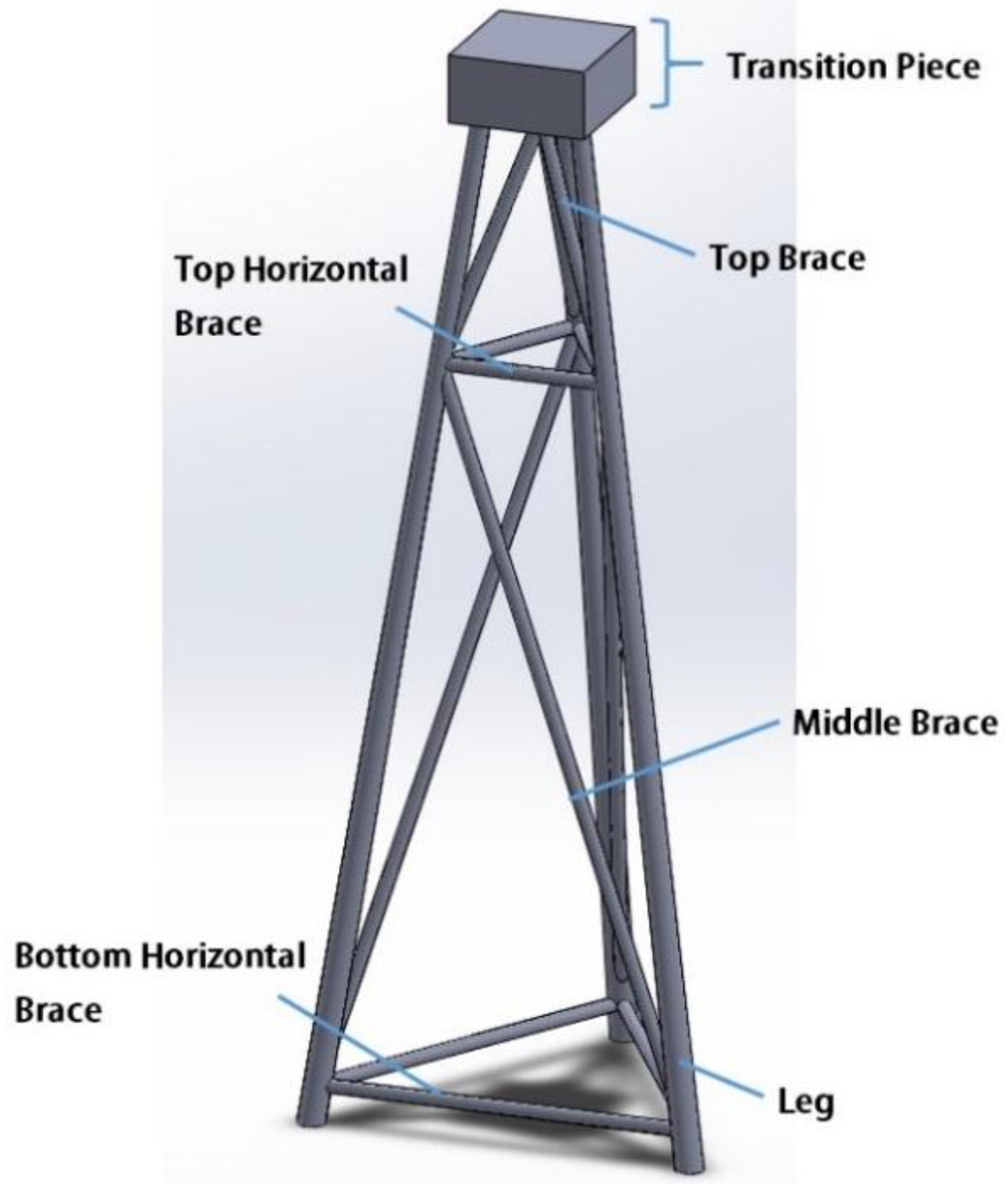
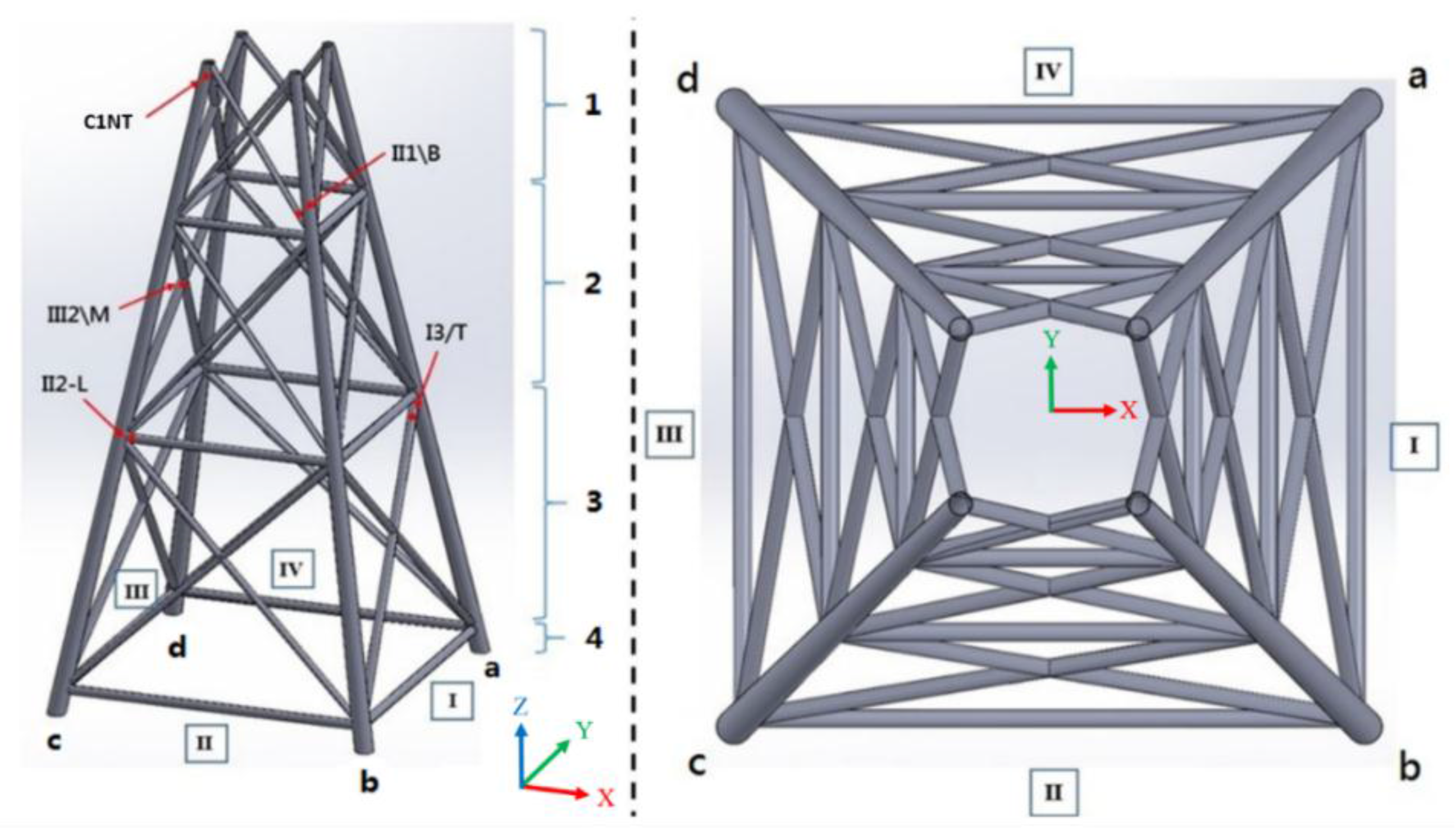
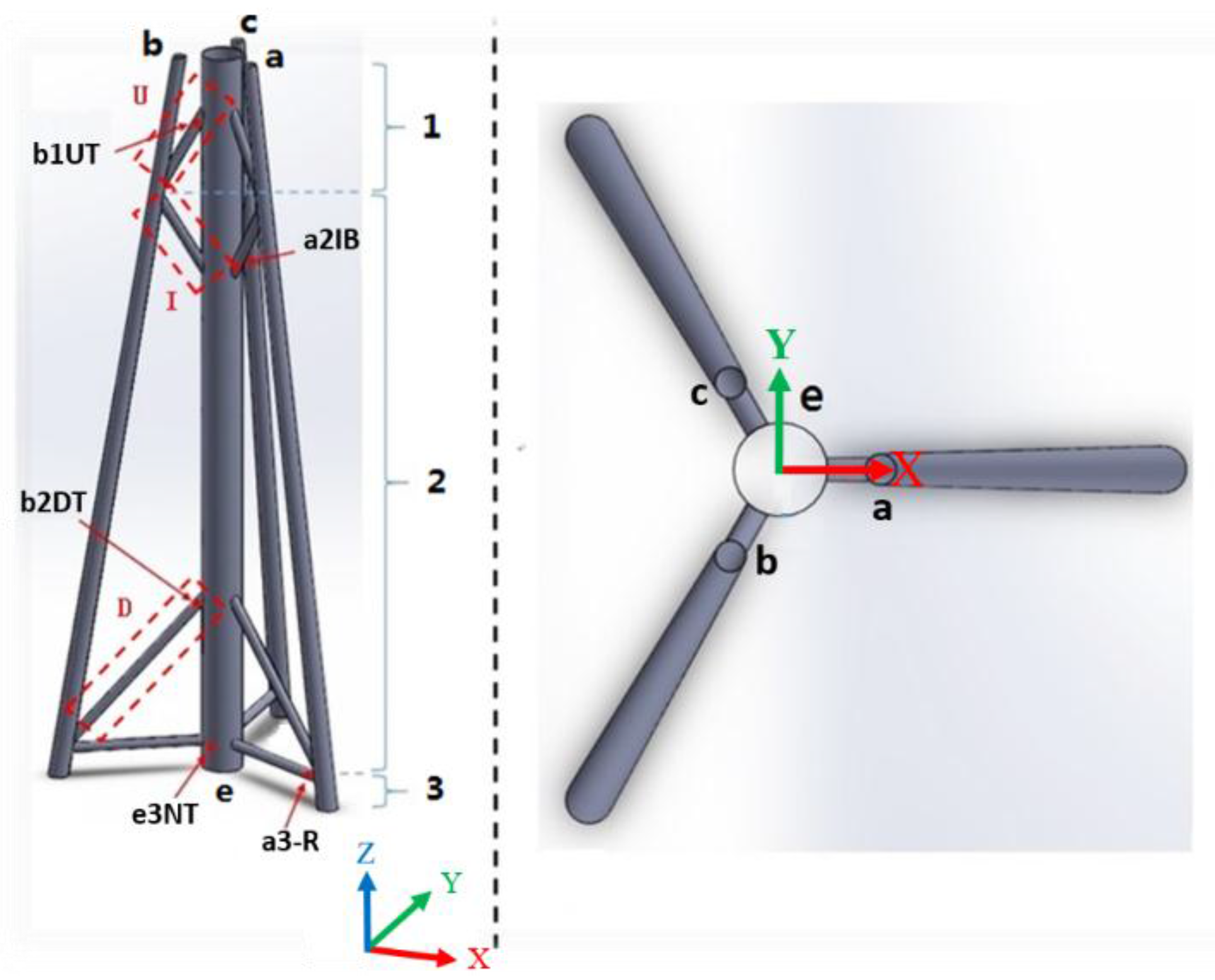
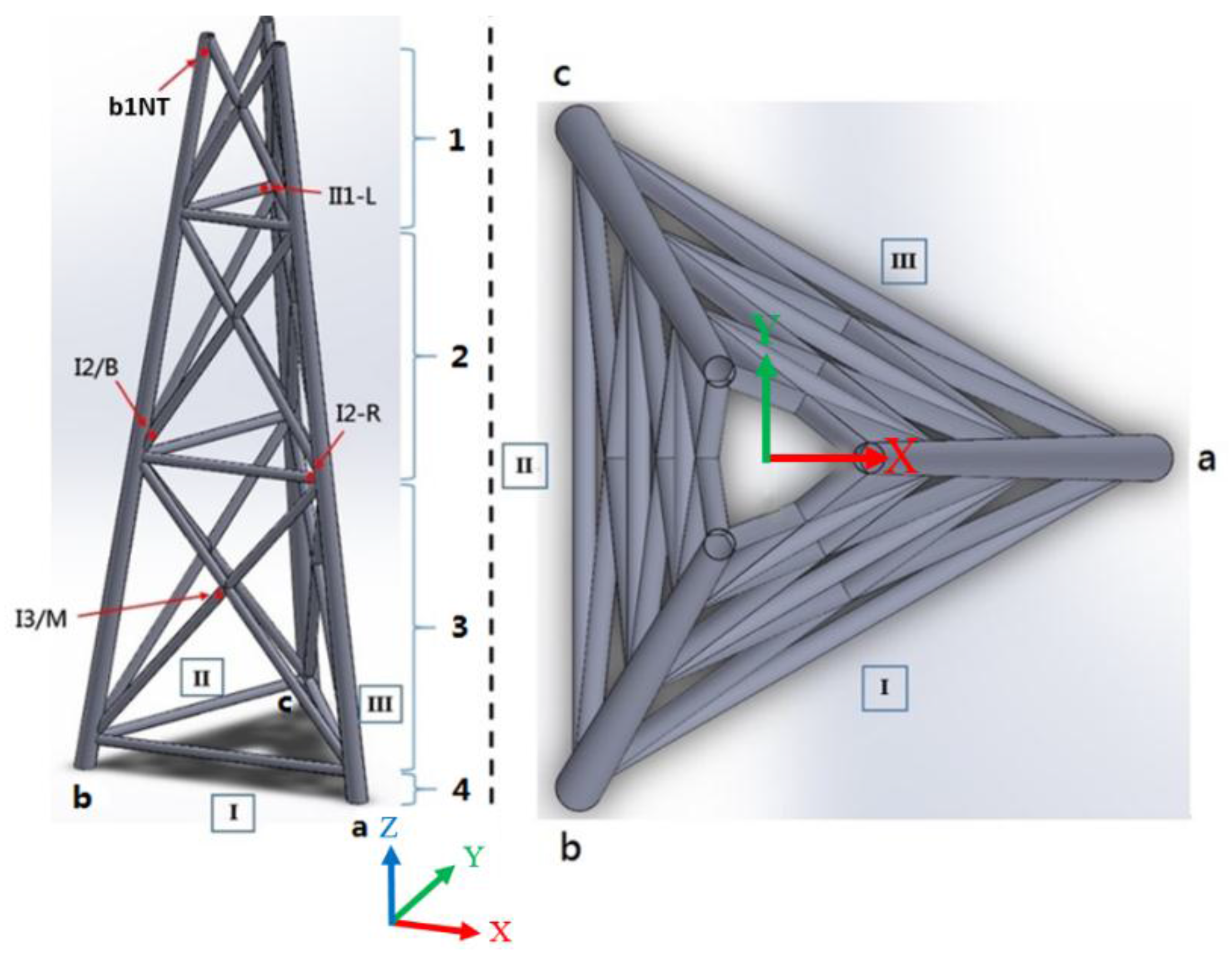
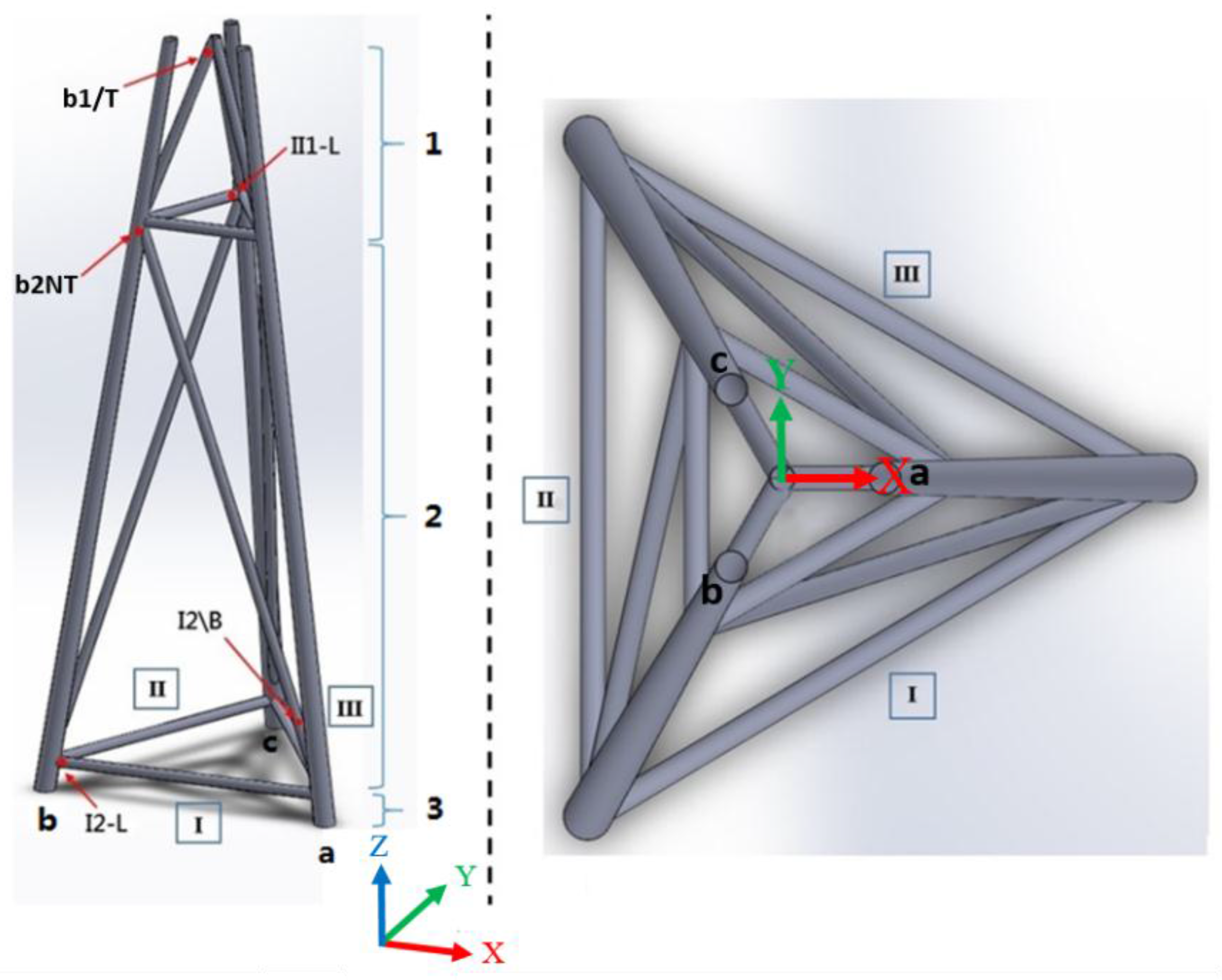
2.3. Terms and Definitions of Abbreviations for Jacket Members and Parts
3. Methods of Analysis
3.1. Basic Properties
3.2. Static Stress Analysis
3.2.1. Load Settings
3.2.2. Load Combination 1: Normal Condition with Simplified (2D) Loads
3.2.3. Load Combination 2: Extreme Condition with Comprehensive (3D) Loads
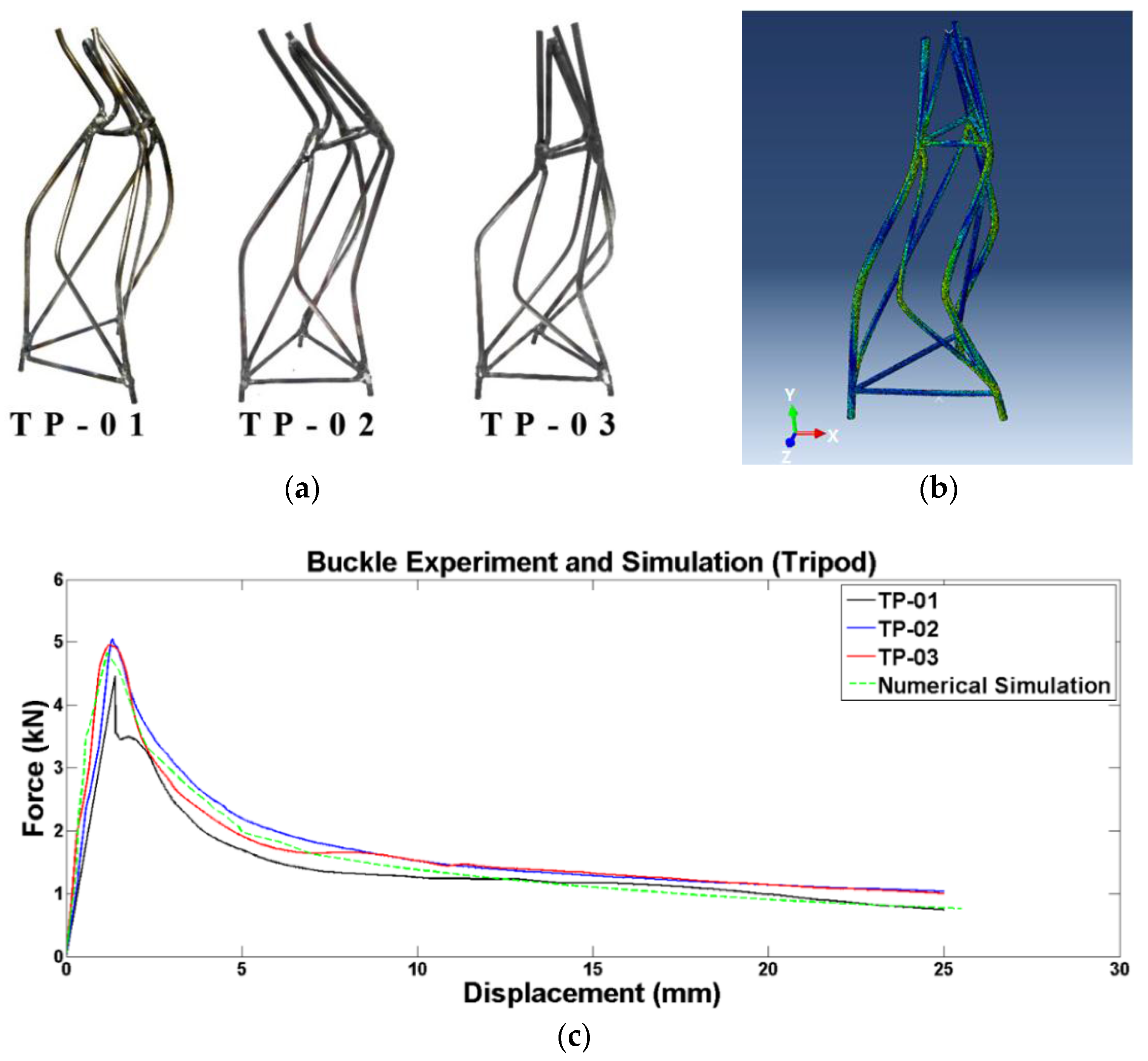
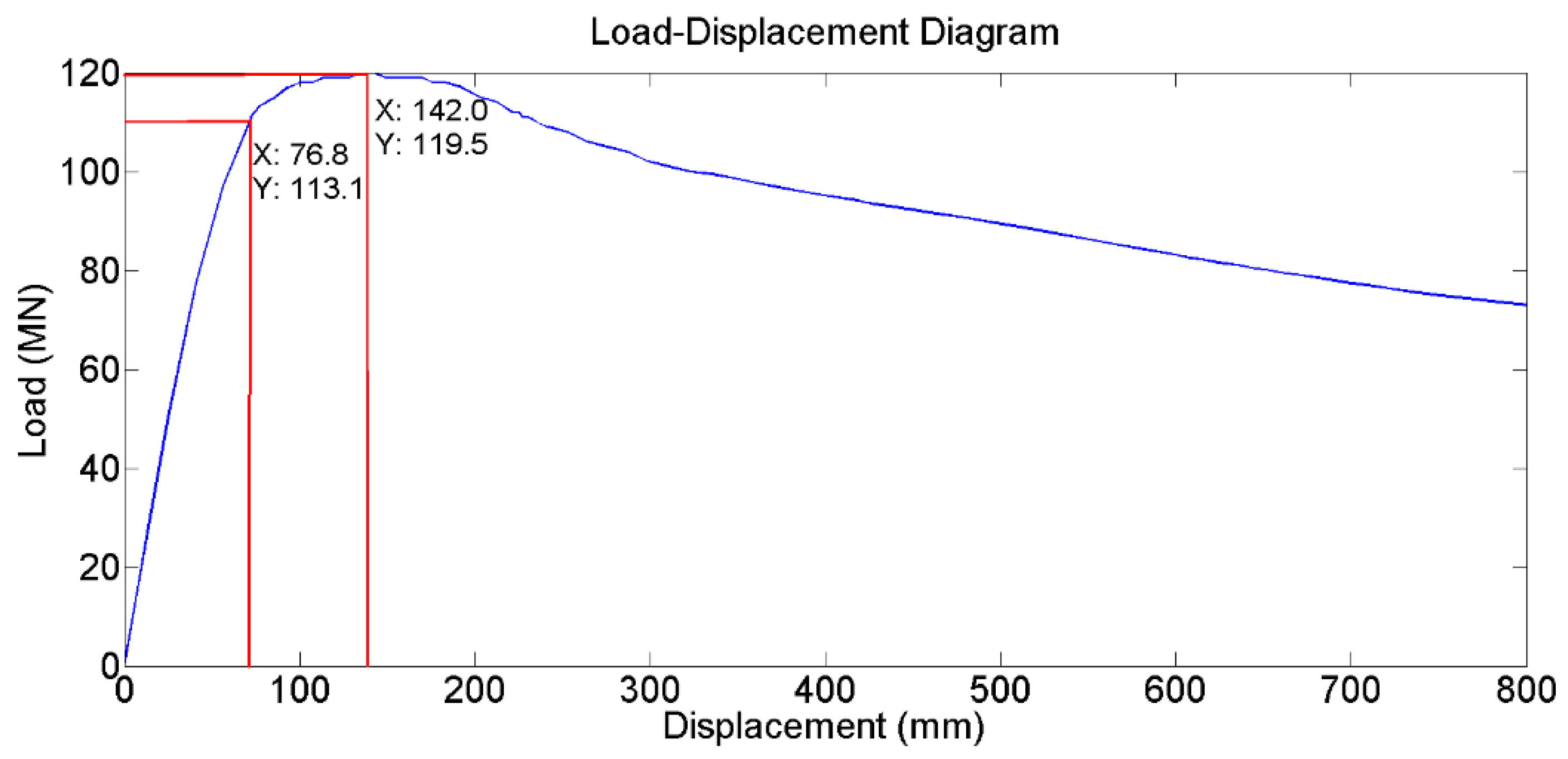
3.3. Unstable Collapse and Postbuckling Analysis
3.3.1. Experiment
3.3.2. Numerical Simulation
3.4. Analysis of Local Buckling Strength Using the NORSOK Standard
4. Results and Discussion
4.1. Stress Analysis
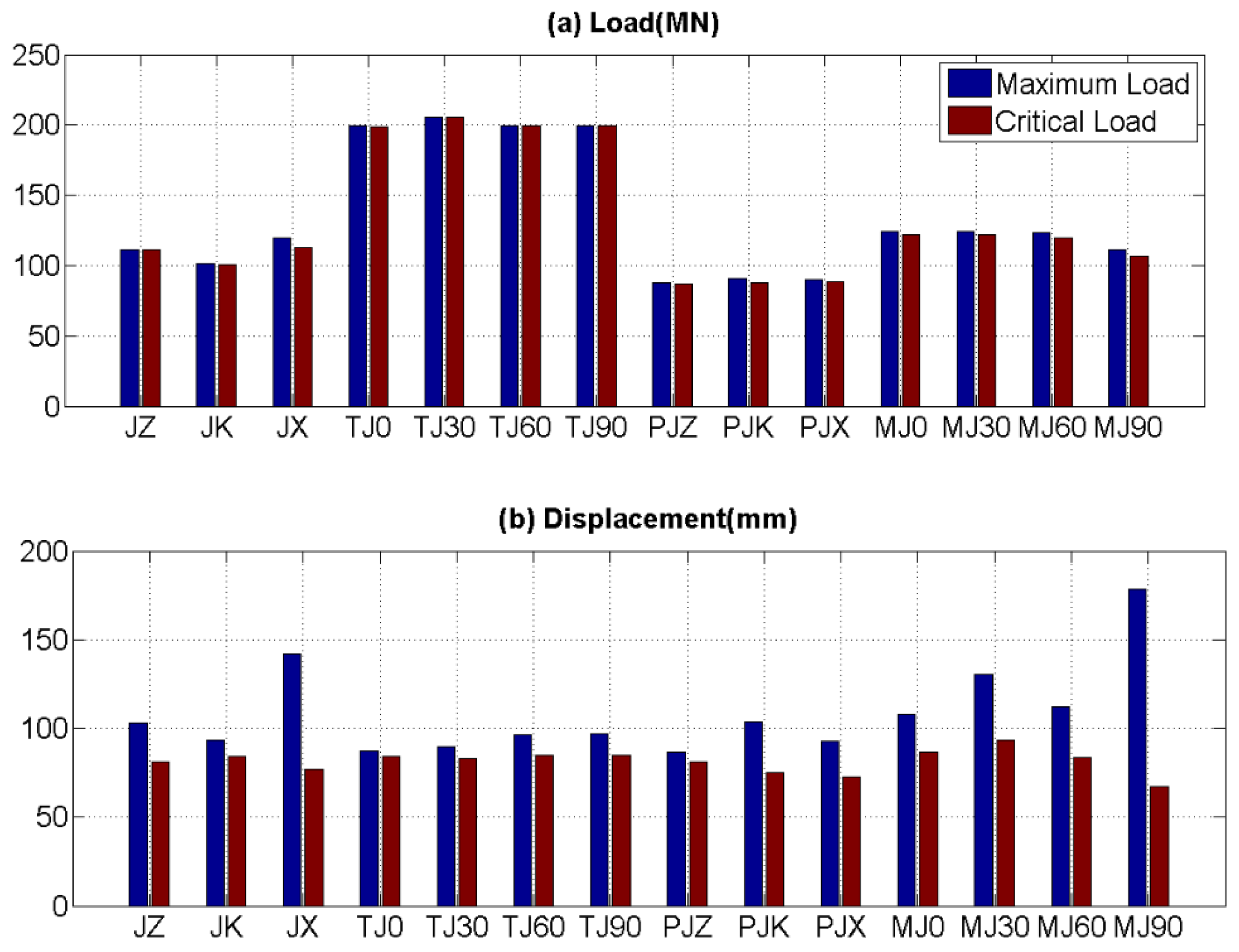
4.2. Unstable Collapse and Postbuckling Analysis
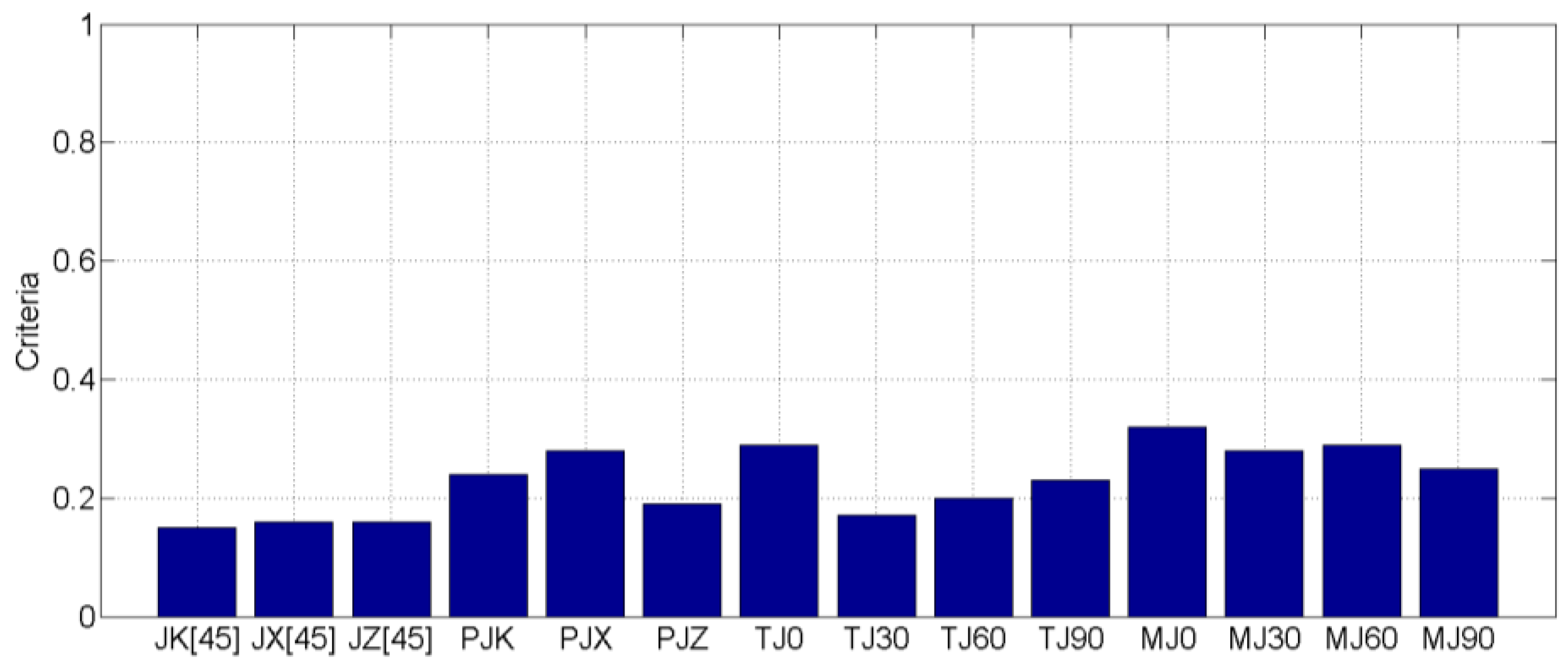
4.3. Analysis of Local Buckling Strength
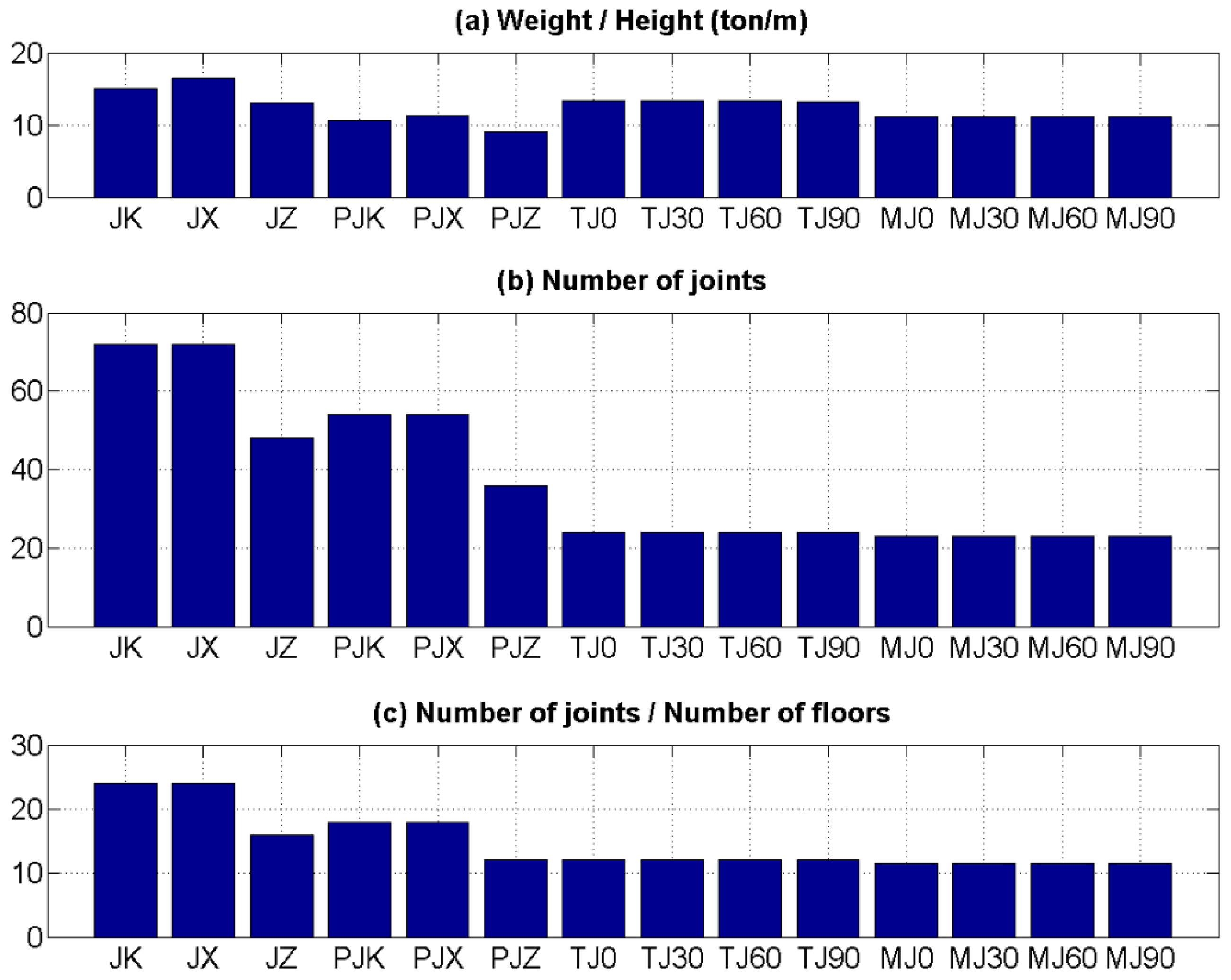
4.4. Miscellaneous Properties
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| J | Traditional jacket substructure |
| TJ | Twisted jacket substructure |
| PJ | Tripod jacket substructure |
| MJ | Twisted-tripod jacket substructure |
| JZ | Traditional jacket substructure Z-braces |
| JK | Traditional jacket substructure K-brace |
| JX | Traditional jacket substructure X-braces |
| TJ0 | Twisted jacket substructures 0° Twisted |
| TJ30 | Twisted jacket substructures 30° twisted |
| TJ60 | Twisted jacket substructures 60° twisted |
| TJ90 | Twisted jacket substructures 90° twisted |
| PJZ | Tripod jacket substructures Z-tripod |
| PJK | Tripod jacket substructures K-tripod |
| PJX | Tripod jacket substructures X-tripod |
| MJ0 | Twisted-tripod jacket substructures 0° tripod |
| MJ30 | Twisted-tripod jacket substructures 0° tripod |
| MJ60 | Twisted-tripod jacket substructures 60° tripod |
| MJ90 | Twisted-tripod jacket substructures 90° tripod |
Appendix A. Definitions and Dimensions of Jacket Substructure Members
A.1. Traditional Jacket Substructure (J-Structure)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traditional Jacket Substructure (J) | |||
|---|---|---|---|
| Jacket Type | Z-Braces | K-Braces | X-Braces |
| Total Height | 66.00 m | 66.00 m | 66.00 m |
| Length of Leg | 67.97 m | 67.97 m | 67.97 m |
| Length of Top Brace | 20.07 m | 16.85 m | 20.07 m |
| Length of Middle Brace | 28.94 m | 23.49 m | 28.94 m |
| Length of Bottom Brace | 37.18 m | 28.17 m | 37.18 m |
| Length of Top Horizontal Brace | 14.58 m | 14.58 m | 14.58 m |
| Length of Middle Horizontal Brace | 22.24 m | 22.24 m | 22.24 m |
| Length of Bottom Horizontal Brace | 31.13 m | 31.13 m | 31.13 m |
| Thickness of Brace | 0.03 m | 0.03 m | 0.03 m |
| Thickness of Leg | 0.04 m | 0.04 m | 0.04 m |
| Diameter of Brace | 0.90 m | 0.90 m | 0.90 m |
| Diameter of Leg | 1.80 m | 1.80 m | 1.80 m |

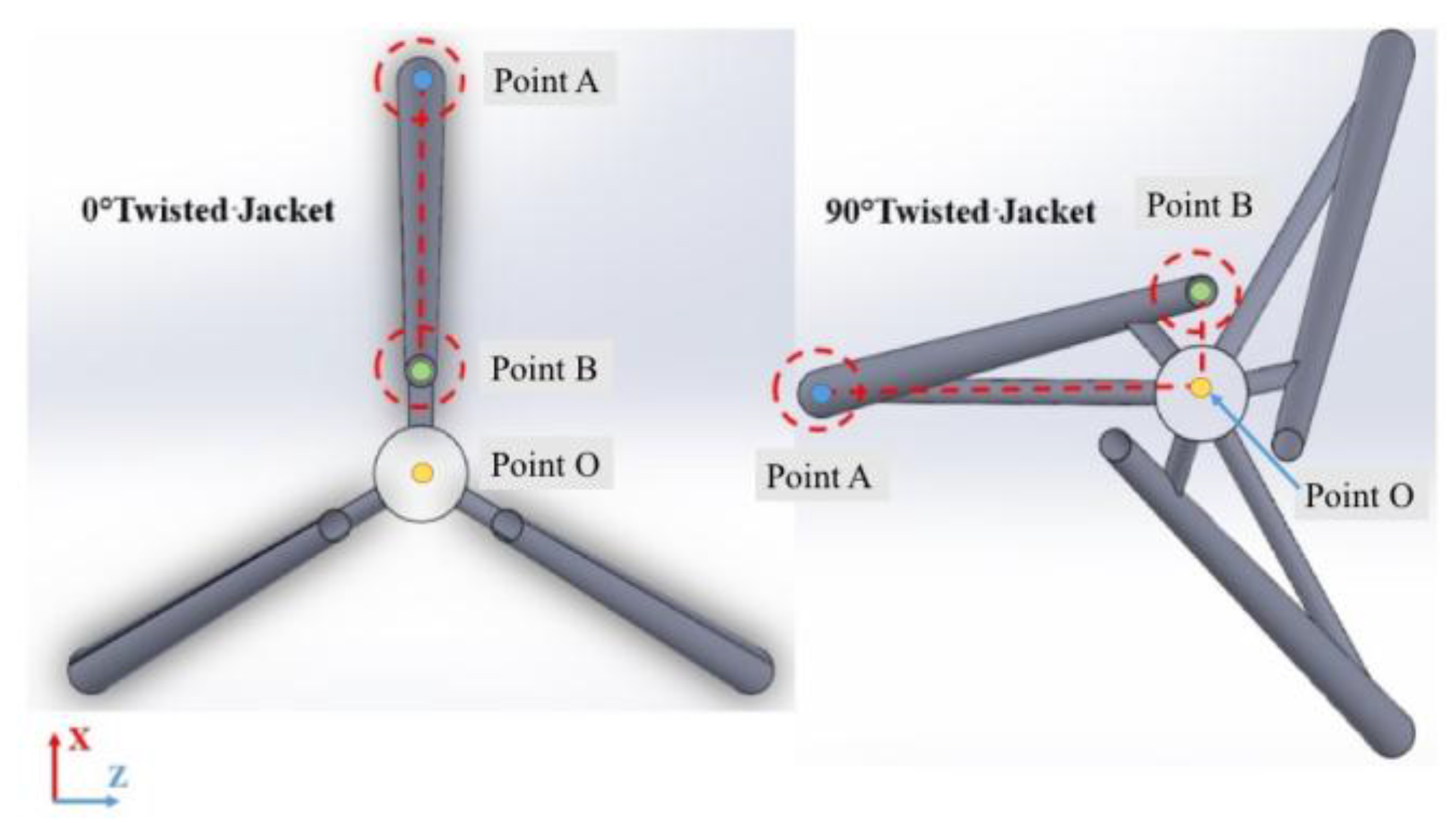
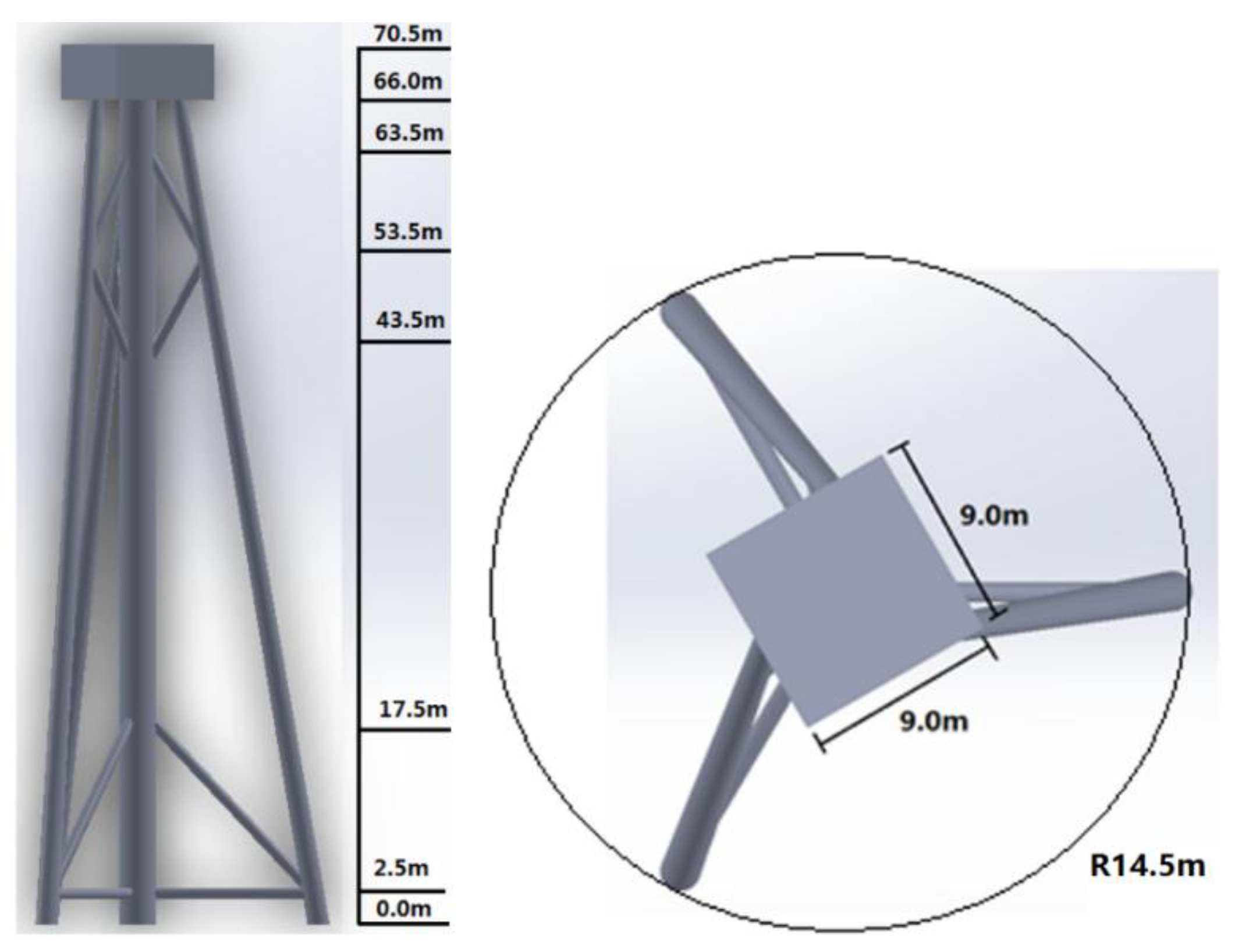
A.2. Twisted Jacket Substructure (TJ-Structure)


| Twisted Jacket Structure | ||||
|---|---|---|---|---|
| Jacket Structure | TJ0 | TJ30 | TJ60 | TJ90 |
| Total Height | 66.00 m | 66.00 m | 66.00 m | 66.00 m |
| Length of Leg | 66.86 m | 66.97 m | 67.28 m | 67.68 m |
| Length of Top Brace | 11.57 m | 11.48 m | 11.20 m | 10.82 m |
| Length of Middle Brace | 11.57 m | 11.48 m | 11.20 m | 10.82 m |
| Length of Bottom Brace | 20.58 m | 20.57 m | 20.54 m | 20.49 m |
| Length of Bottom Horizontal Brace | 14.09 m | 14.08 m | 14.03 m | 13.95 m |
| Thickness of Top Brace | 0.04 m | 0.04 m | 0.04 m | 0.04 m |
| Thickness of Middle Brace | 0.05 m | 0.05 m | 0.05 m | 0.05 m |
| Thickness of Bottom Brace | 0.05 m | 0.05 m | 0.05 m | 0.05 m |
| Thickness of Bottom Horizontal Brace | 0.05 m | 0.05 m | 0.05 m | 0.05 m |
| Thickness of Leg | 0.04 m | 0.04 m | 0.04 m | 0.04 m |
| Thickness of Central Column | 0.04 m | 0.04 m | 0.04 m | 0.04 m |
| Diameter of Top Brace | 1.2 m | 1.2 m | 1.2 m | 1.2 m |
| Diameter of Middle Brace | 1.6 m | 1.6 m | 1.6 m | 1.6 m |
| Diameter of Bottom Brace | 1.6 m | 1.6 m | 1.6 m | 1.6 m |
| Diameter of Bottom Horizontal Brace | 1.6 m | 1.6 m | 1.6 m | 1.6 m |
| Diameter of Leg | 1.80 m | 1.80 m | 1.80 m | 1.80 m |
| Diameter of Central Column | 3.60 m | 3.60 m | 3.60 m | 3.60 m |

A.3. Tripod Jacket Substructure (PJ-Structure)

| Tripod Jacket Substructure (PJ) | |||
|---|---|---|---|
| Jacket Type | PJZ | PJK | PJX |
| Total Height | 66.00 m | 66.00 m | 66.00 m |
| Length of Leg | 66.86 m | 66.86 m | 66.86 m |
| Length of Top Brace | 18.32 m | 16.39 m | 18.32 m |
| Length of Middle Brace | 26.23 m | 22.76 m | 26.23 m |
| Length of Bottom Brace | 32.99 m | 27.00 m | 32.99 m |
| Length of Top Horizontal Brace | 11.07 m | 11.07 m | 11.07 m |
| Length of Middle Horizontal Brace | 17.25 m | 17.25 m | 17.25 m |
| Length of Bottom Horizontal Brace | 24.41 m | 24.41 m | 24.41 m |
| Thickness of Brace | 0.03 m | 0.03 m | 0.03 m |
| Thickness of Leg | 0.04 m | 0.04 m | 0.04 m |
| Diameter of Brace | 0.90 m | 0.90 m | 0.90 m |
| Diameter of Leg | 1.80 m | 1.80 m | 1.80 m |

A.4. Twisted-Tripod Jacket Substructure (MJ-Structure)

| Twisted Tripod Jacket Substructure (MJ) | ||||
|---|---|---|---|---|
| Jacket Type | MJ0 | MJ30 | MJ60 | MJ90 |
| Total Height | 66.00 m | 66.00 m | 66.00 m | 66.00 m |
| Length of Leg | 66.86 m | 66.97 m | 67.28 m | 67.68 m |
| Length of Top Brace | 17.23 m | 17.15 m | 16.93 m | 16.63 m |
| Length of Middle Brace | 50.85 m | 51.10 m | 51.12 m | 50.89 m |
| Length of Top Horizontal Brace | 11.07 m | 10.70 m | 9.61 m | 7.87 m |
| Length of Bottom Horizontal Brace | 24.41 m | 24.38 m | 24.32 m | 24.16 m |
| Thickness of Horizontal Brace | 0.03 m | 0.03 m | 0.03 m | 0.03 m |
| Thickness of Top Brace | 0.06 m | 0.06 m | 0.06 m | 0.06 m |
| Thickness of Middle Brace | 0.06 m | 0.06m | 0.06 m | 0.06 m |
| Thickness of Leg | 0.04 m | 0.04 m | 0.04 m | 0.04 m |
| Diameter of Horizontal Brace | 0.90 m | 0.90 m | 0.90 m | 0.90 m |
| Diameter of Top Brace | 0.90 m | 0.90 m | 0.90 m | 0.90 m |
| Diameter of Middle Brace | 1.20 m | 1.20 m | 1.20 m | 1.20 m |
| Diameter of Leg | 1.80 m | 1.80 m | 1.80 m | 1.80 m |

Appendix B. Definitions and Examples of the Terminology for Jacket Structural Members and Parts




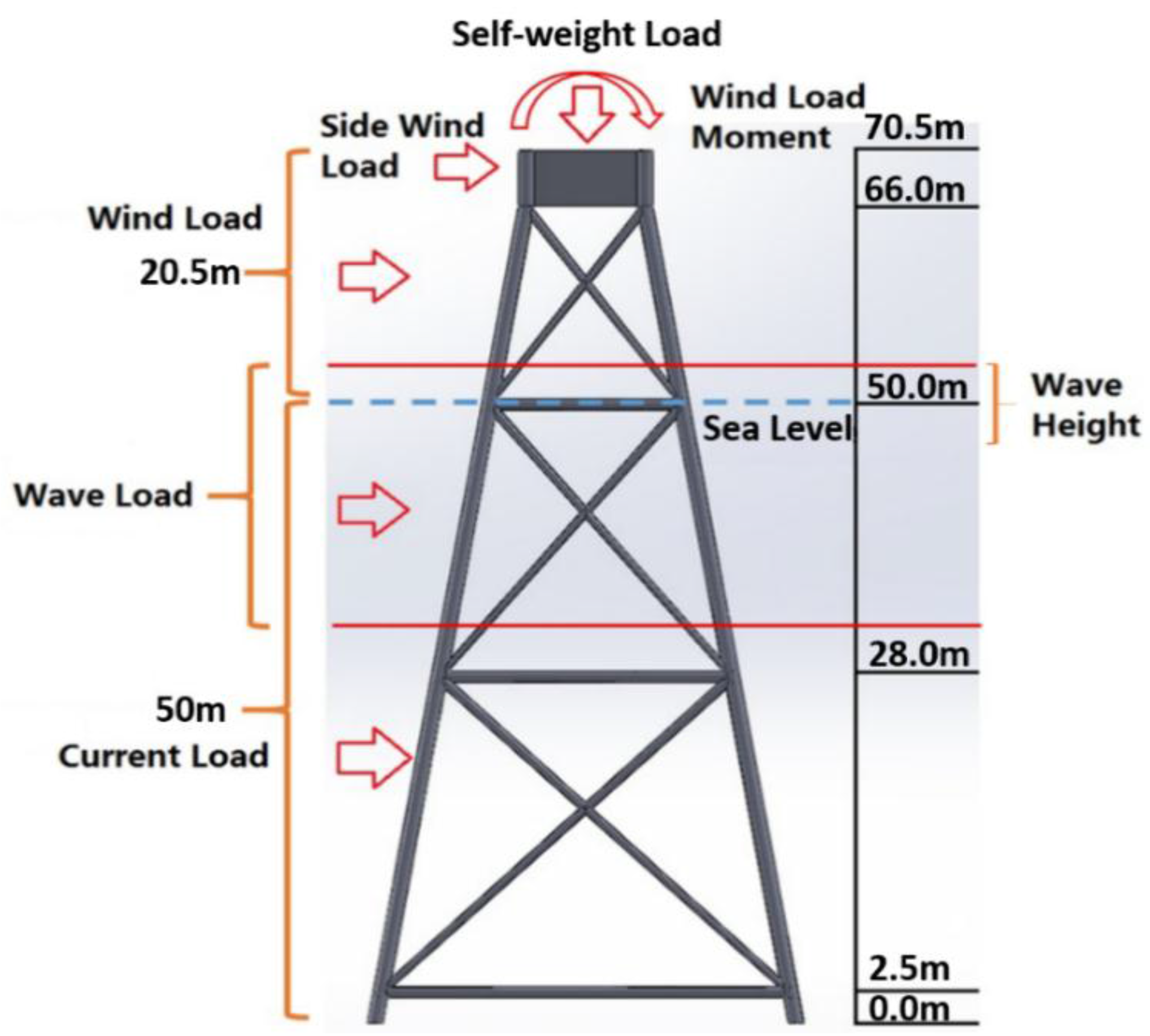
Appendix C. Detailed Description of Load Settings
C.1. General Information

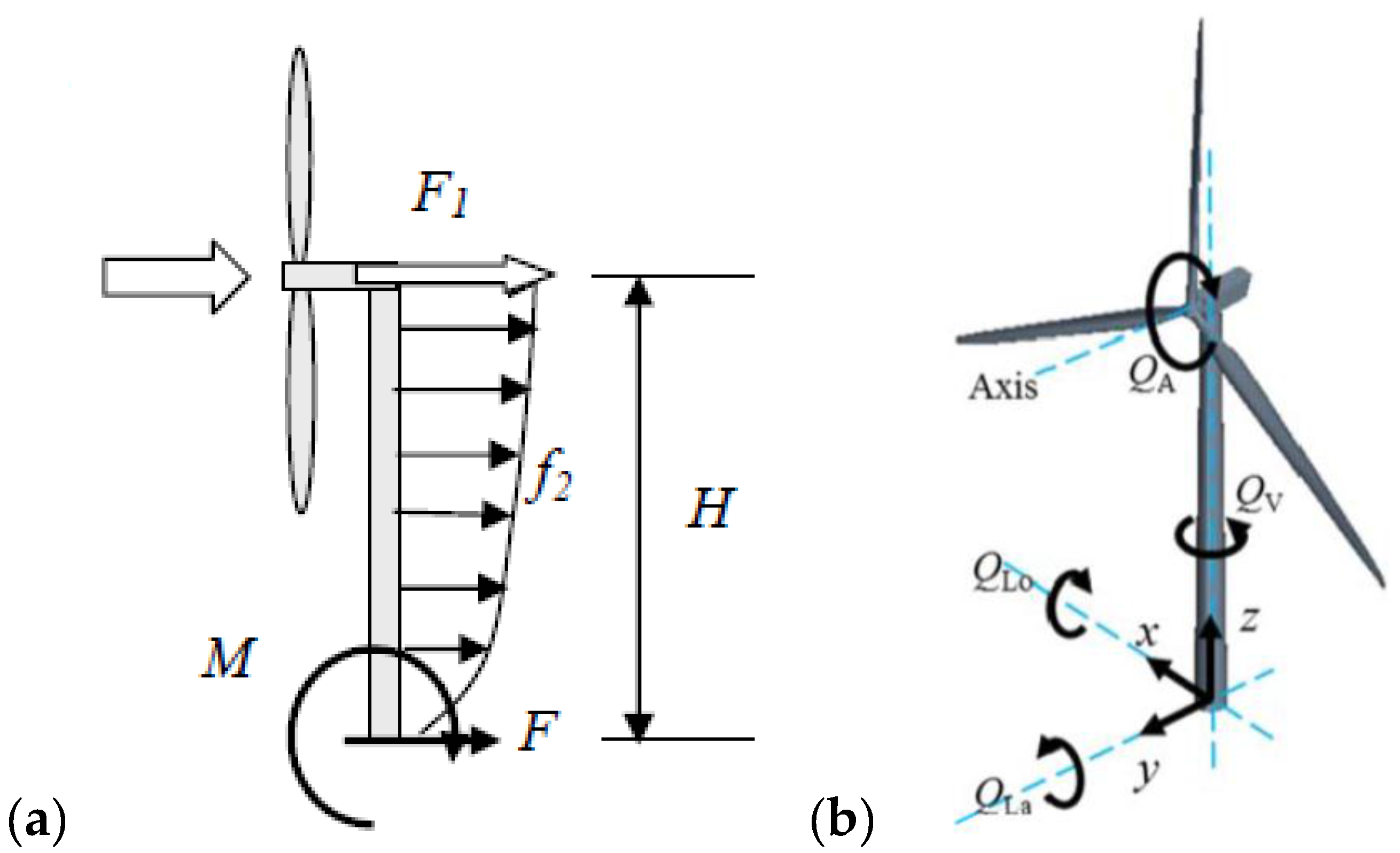
C.2. Wind Load

| Wind Speed | Component | Fx | Fy | Fz | QLo | QLa | Qv |
|---|---|---|---|---|---|---|---|
| 70 m/s | Blade | −38.948 kN | −118.5 kN | 411.21 kN | 13.89 MN-m | 5.38 MN-m | 0.849 MN-m |
| Nacelle | −5.177 kN | −10.226 kN | 0.405 kN | 0.975 MN-m | −0.454 MN-m | 6.556 kN-m | |
| Tower | 261.2 MN | −315.11 kN | 37.953 kN | 11.397 MN-m | 4.705 MN-m | −1.354 kN-m |
C.3. Wave and Current Loads
- v = fluid particle (waves and/or current) velocity (m/s)
- = fluid particle acceleration (m/s2)
- A = cross-sectional area (m2)
- D = diameter or typical cross-sectional dimension (m)
- = mass density of fluid (kg/m3)
- = added mass coefficient (with cross-sectional area as the reference area)
- = drag coefficient
C.4. Calculated Loads for Simulations

References
- Li, K.; Bian, H.; Liu, C.; Zhang, D.; Yang, Y. Comparison of geothermal with solar and wind power generation systems. Renew. Sustain. Energy Rev. 2015, 42, 1464–1474. [Google Scholar] [CrossRef]
- Dai, K.; Bergot, A.; Liang, C.; Xiang, W.N.; Huang, Z. Environmental issues associated with wind energy—A review. Renew. Energy 2015, 75, 911–921. [Google Scholar] [CrossRef]
- Baker, C. Wind engineering—Past, present and future. J. Wind Eng. Ind. Aerodyn. 2007, 95, 843–870. [Google Scholar] [CrossRef]
- Kaldellis, J.K.; Zafirakis, D. The wind energy (r) evolution: A short review of a long history. Renew. Energy 2011, 36, 1887–1901. [Google Scholar] [CrossRef]
- Global Wind Energy Concil (GWEC). Global Wind Report—Annual Market Update 2014; Global Wind Energy Concil: Brussels, Belgium, 2015. [Google Scholar]
- The European Wind Energy Association (EWEA). The European Offshore Wind Industry—Key Trends and Statistics 1st half 2015; The European Wind Energy Association: Brussels, Belgium, 2015. [Google Scholar]
- Vries, W.E. Assessment of Bottom-Mounted Support Structure Types with Conventional Design Stiffness and Installation Techniques for Typical Deep Water Sites; Deliverable Report D4.2.1 (WP4: Offshore foundation and support structures); The European Wind Energy Association: Brussels, Belgium, 2007. [Google Scholar]
- Lesny, K.; Richwien, W. Design, Construction and Installation of Support Structures for Offshore. Wind Energy Systems Global Wind Report—Annual Market Update Optimising Design and Construction for Safe and Reliable Operation; Sørensen, J.D., Sørensen, J.N., Eds.; Woodhead Publishing Limited: Cambridge, UK, 2010. [Google Scholar]
- Golightly, C. Tilting of monopiles long, heavy and stiff; pushed beyond their limits. Available online: http://www.nce.co.uk/Journals/2014/06/03/z/h/d/GE-January-2014-Tilting-of-monopiles-Golightly.pdf (accessed on 17 January 2016).
- Kaldellis, J.K.; Zafirakis, D.P. Trends, prospects, and R&D directions in wind turbine technology. Compr. Renew. Energy 2012, 2, 671–724. [Google Scholar]
- Musial, W.; Butterfield, S.; Ram, B. Energy from offshore wind. In Proceedings of the Offshore Technology Conference (NREL/CP-500–39450), Houston, TX, USA, 1–4 May 2006.
- Pérez-Collazo, C.; Greaves, D.; Iglesias, G. A review of combined wave and offshore wind energy. Renew. Sustain. Energy Rev. 2015, 42, 141–153. [Google Scholar] [CrossRef]
- Moné, C.; Smith, A.; Maples, B.; Hand, M. 2013 Cost of Wind Energy Review; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2015.
- Gong, W. Lattice Tower Design of Offshore Wind Turbine Support Structures. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, June 2011. [Google Scholar]
- Fenech, L.; Sant, T.; Muscat, M. Design and cost evaluation of a deep water support structure for a wind turbine in central mediterranean waters. In Proceedings of the European Wind Energy Conference, Brussels, Belgium, 14–17 March 2011.
- Shi, W.; Park, H.C.; Chung, C.W.; Kim, Y.C. Comparison of dynamic response of monopole, tripod and jacket foundation system for a 5-MW wind turbine. In Proceedings of the 21th International Offshore and Polar Engineering Conferenece, Maui, HI, USA, 19–24 June 2011.
- Seidel, M. Jacket substructures for the REpower 5M wind turbine. In Proceedings of the Conference European Offshore Wind 2007, Berlin, Germany, 4–6 December 2007.
- Shi, W.; Park, H.; Chung, C.; Baek, J.; Kim, Y.; Kim, C. Load analysis and comparison of different jacket foundations. Renew. Energy 2013, 54, 201–210. [Google Scholar] [CrossRef]
- Sun, X. Structure form selection of wind turbine towers. Sciencepaper Online, 2013. Available online: http://www.paper.edu.cn/download/downPaper/201302-190 (accessed on 14 January 2016).
- Shi, W.; Park, H.; Han, J.; Na, S.; Chang, W. A study on the effect of different modeling parameters on the dynamic response of a jacket-type offshore wind turbine in the Korean southwest sea. Renew. Energy 2013, 58, 50–59. [Google Scholar] [CrossRef]
- Alanjari, P.; Asgarian, B.; Bahaari, M.R.; Honarvar, M.R. On the energy dissipation of jacket type offshore platforms with different pile–leg interactions. Appl. Ocean Res. 2009, 31, 82–89. [Google Scholar] [CrossRef]
- Alanjari, P.; Asgarian, B.; Kia, M. Nonlinear joint flexibility element for the modeling of jacket-type offshore platforms. Appl. Ocean Res. 2011, 33, 147–157. [Google Scholar] [CrossRef]
- Hall, R.A.; Shaw, R.L. Offshore Structure Support. U.S. Patent 7,942,611 B2, 17 May 2011. [Google Scholar]
- Hall, R.A. Offshore Support Structure and Associated Method of Installing. U.S. Patent 8,511,940 B2, 20 August 2013. [Google Scholar]
- Keystone Keystone Engineering Inc., Inward Battered Guide Structure—The “Twisted Jacket”, Keystone Engineering IBGS brochure 2.0, 2015. Available online: http://issuu.com/keystoneengineering/docs/ibgs_brochure_2.0/5?e=0/10933386 (accessed on 9 January 2016).
- Li, P. Analysis and Design of Offshore Jacket Wind Turbine. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, June 2010. [Google Scholar]
- Jonkman, J.M.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW reference wind turbine for offshore system development. National Renewable Energy Laboratory 2009, 1. [Google Scholar] [CrossRef]
- Vries, W.D.; Vemula, N.K.; Passon, P.; Fischer, T.; Kaufer, D.; Matha, D. Support Structure Concepts for Deep Water Sites: Deliverable D4.2.8 (WP4: offshore foundations and support structures); The European Wind Energy Association: Brussels, Belgium, 2011. [Google Scholar]
- Chew, K.H.; Ng, E.Y.K.; Tai, K. Offshore wind turbine jacket substructure: A comparison study between four-legged and three-legged designs. J. Ocean Wind Energy 2014, 1, 77–81. [Google Scholar]
- Det Norske Veritas—Germanischer Lloyd (DNV GL). Recommended Practice DNV-OS-J101—Design of Offshore Wind Turbine Structures; DNV GL: Høvik, Norway, 2014. [Google Scholar]
- Det Norske Veritas—Germanischer Lloyd (DNV GL). Recommended Practice DNV-RP-C201—Environmental Conditions and Environmental Loads; DNV GL: Høvik, Norway, 2010. [Google Scholar]
- Su, C.H.; Liaw, C.T. Oceanographical Observation Data—Annual Report 2011 (Penghu Harbor); Harbor & Marine Technology Center: Taipei, Taiwan, 2013. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence modeling for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Abaqus 6.14. Abaqus Analysis User’s Guide; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2015. [Google Scholar]
- N-004 Design of Steel Structures (Rev 3). Available online: https://www.standard.no/en/sectors/energi-og-klima/petroleum/norsok-standard-categories/n-structural/n-0042/ (accessed on 1 August 2015).
- Kawai, H.; Michishita, K.; Deguchi, A. Design Wind Loads on a Wind Turbine for Strong Wind, Proceedings of the BBAA VI International Colloquium on: Bluff Bodies Aerodynamics & Applications, Milano, Italy, 20–24 July 2008.
- Morison, J.R. The Force Distribution Exerted by Surface Waves on Piles; University of California: Berkeley, CA, USA, 1950. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures, 1st ed.; Cambridge University Press: Cambridge, UK, 1990; pp. 174–256. [Google Scholar]







| Level | Abbreviation | Definition |
|---|---|---|
| I, II, III, IV | First, second, third and fourth face | |
| a, b, c, d | Leg member | |
| e | Central vertical member (for TJ-structures only) | |
| 1, 2, 3, 4 | First, second, third and fourth layer counting from the top | |
| \ and / | Oblique member with “\” and “/” orientation | |
| - | Horizontal member (“-“ orientation) | |
| U, I, D | Upper, middle and lower oblique member (for TJ-structures only) | |
| N | Particularly for leg members | |
| T, B, M, R, L | Top, bottom, middle, right and left part |
| Jacket Type (Wave, Current Directions) | Normal Condition + 2D | Extreme Condition + 3D | ||
|---|---|---|---|---|
| Max. von Mises Stress (MPa) | Location | Max. von Mises Stress (MPa) | Location | |
| JZ (0) | 18.48 | a4NB | N/A | N/A |
| JK (0) | 19.81 | a4NB | N/A | N/A |
| JX (0) | 21.15 | a4NB | N/A | N/A |
| JZ (45) | N/A | N/A | 32.60 | II3/M |
| JK (45) | N/A | N/A | 32.05 | b4NB |
| JX (45) | N/A | N/A | 35.02 | III3\T and IIII3/T |
| TJ0 | 17.10 | a3NB | 32.84 | a3NB |
| TJ30 | 18.53 | a3NB | 37.26 | a3NT |
| TJ60 | 18.84 | a3NB | 37.59 | a2DB |
| TJ90 | 19.31 | b3NB | 46.24 | a2IT |
| PJZ | 20.11 | a4NB | 39.55 | I3/M |
| PJK | 21.65 | a4NB | 39.30 | I3/B |
| PJX | 22.47 | a4NB | 32.71 | I3\T |
| MJ0 | 23.04 | a3NB | 45.30 | c2NM |
| MJ30 | 30.19 | a2NT | 39.83 | a3NB |
| MJ60 | 46.53 | I2-L | 41.79 | a2NM |
| MJ90 | 34.62 | II2-L | 39.73 | a2NM |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, I.-W.; Wong, B.-L.; Lin, Y.-H.; Chau, S.-W.; Huang, H.-H. Design and Analysis of Jacket Substructures for Offshore Wind Turbines. Energies 2016, 9, 264. https://doi.org/10.3390/en9040264
Chen I-W, Wong B-L, Lin Y-H, Chau S-W, Huang H-H. Design and Analysis of Jacket Substructures for Offshore Wind Turbines. Energies. 2016; 9(4):264. https://doi.org/10.3390/en9040264
Chicago/Turabian StyleChen, I-Wen, Bao-Leng Wong, Yu-Hung Lin, Shiu-Wu Chau, and Hsin-Haou Huang. 2016. "Design and Analysis of Jacket Substructures for Offshore Wind Turbines" Energies 9, no. 4: 264. https://doi.org/10.3390/en9040264
APA StyleChen, I.-W., Wong, B.-L., Lin, Y.-H., Chau, S.-W., & Huang, H.-H. (2016). Design and Analysis of Jacket Substructures for Offshore Wind Turbines. Energies, 9(4), 264. https://doi.org/10.3390/en9040264