4.1. Baseline Simulation and Validation
The static prediction precision of the solver has been validated in a previous study [
21] by comparing the numerical results of NREL S809 airfoil static characteristics with the experiment conducted in the Delft University of Technology [
34]. Here, the dynamic prediction precision of the solver will be validated by comparing results with experiment conducted at Ohio State University (OSU) [
22]. The pitch oscillation, as well as static characteristics, are both investigated in the OSU experiment in order to aid in the developments of new airfoil performance codes that account for unsteady behavior. The OSU-measured sectional static aerodynamic coefficients of the S809 airfoil with angle of attack will also be simulated and can be used to compare with the dynamic counterparts.
4.1.1. Static Aerodynamic Characteristics and Grid-Resolution Study
In the experiment, the original sharp trailing edge of a 457-mm chord S809 airfoil was thickened to 1.25-mm for fabrication purposes. This thickness was added to the upper surface over the last 10% of the chord. In the present simulation, this minor modification is taken into account for modeling and grid generation. For a locally blunt trailing edge,
O-mesh is a better choice than
C-mesh which is used for a previous static performance study [
21] on a sharp trailing edge S809 airfoil, since
O-mesh can easily ensure the mesh orthogonality in the vicinity of a blunt trailing edge.
The static simulation conditions are set in correspondence with its counterpart of oscillation simulation, with Ma = 0.076, Re = 1.0 × 10
6. First, the grid-resolution study is carried out for AoA = 4.1°. Three different mesh resolutions are tested: a course mesh of 1.28 × 10
4 cells, a medium mesh of 2.88 × 10
4 cells, and a fine mesh of 5.12 × 10
4 cells. Relevant dimensions and spacing of the three meshes are given in
Table 1. The mesh refinement is carried out in the airfoil’s normal direction as well as the wrapping direction. The first layer spacing is equal to or less than 1 × 10
−5 to ensure that the
y+ is less than 1.
Figure 3 shows the medium mesh.
The comparisons of aerodynamic coefficients for different mesh levels are listed in
Table 2. The lift and moment coefficients have a fairly good agreement with the experimental results, whereas the numerical drag coefficients are much larger. This discrepancy between numerical and experimental drag coefficients is probably because the numerical simulations are carried out under the assumption of full turbulence which causes the drag larger than that of a laminar flow. In the experiment there probably exists transition at a certain location on the suction surface, before which the flow is laminar, and hence the resulting drag is lower than the assumed full turbulent flow. The introduction of a transition model into the simulation is expected to reduce the discrepancy. From an overall view of
Table 2, the aerodynamic coefficients predicted with a finer mesh are closer to the experimental results, and there is a small difference between the medium and fine mesh. Therefore, all the simulations are performed using the medium mesh. The jet-off CFJ airfoil mesh is obtained by adding the corresponding part of the jet channel mesh to the baseline medium mesh. Similarly, the jet-on CFJ airfoil mesh is obtained by adding the corresponding parts of the jet channel mesh, the high-pressure and low-pressure cavities meshes to the baseline medium mesh.
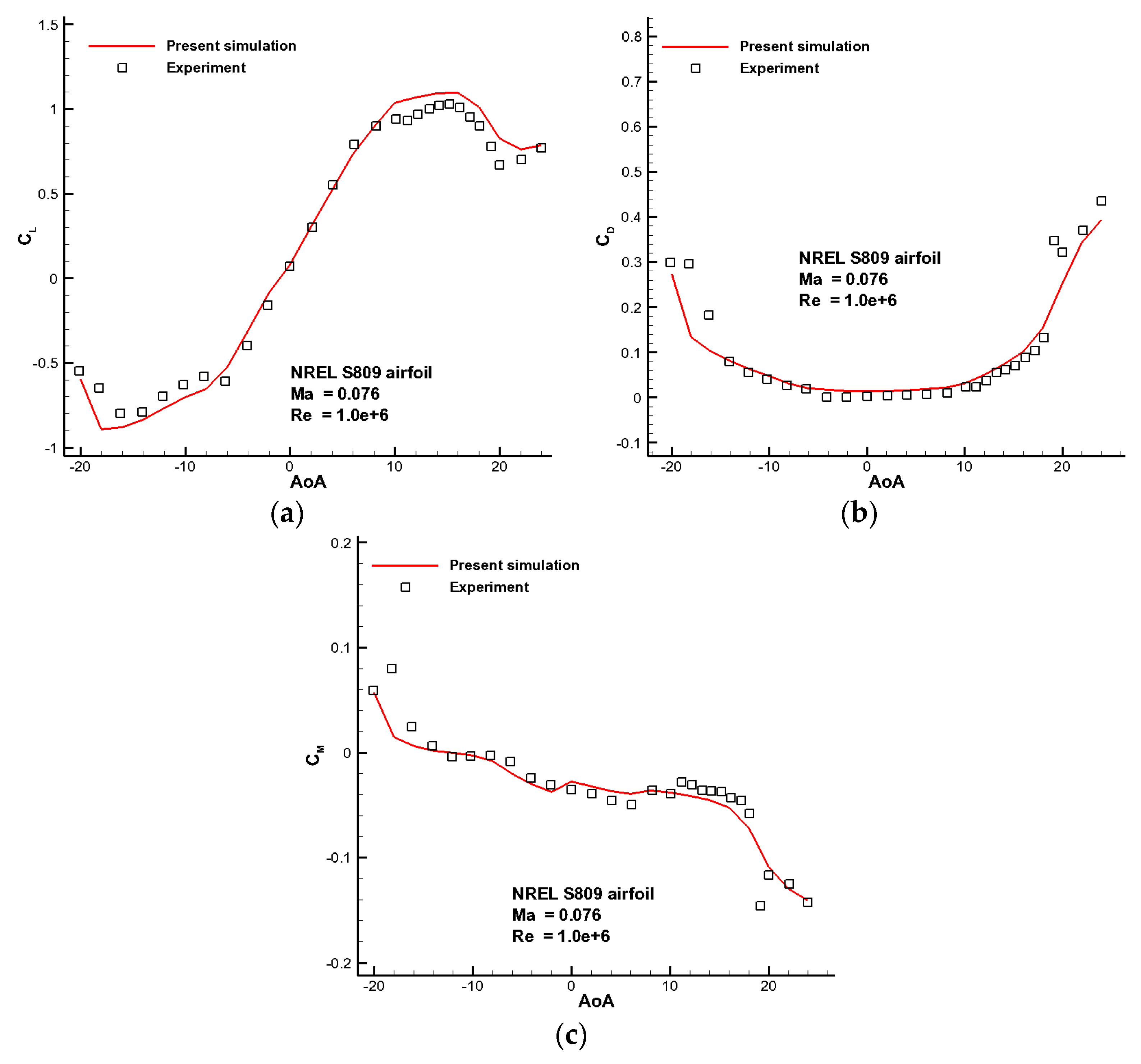
The medium mesh is further used to simulate a wide range of angles of attack from −20° to 24° for more validations. The computed aerodynamic force and moment coefficients are compared with experimental results in
Figure 4. All the simulations are carried out at same Mach number 0.076 and Reynolds number 1.0 × 10
6. The present static results will be used to compare with the next dynamic stall results which vary in a range of angles of attack between 4° and 24°. From
Figure 4, for the range of angles of attack from −6° to 8°, the numerical results agree rather well with the measurement. After the flow separation occurrence, the lift is a little over-predicted but within an acceptable degree, and the variation trend is well captured. Overall, the present numerical results agree fairly well with experiment.
Figure 5 gives the comparison of surface pressure coefficient distributions with measurements for several AoA conditions, also showing rather good agreements except for large angles of attack over 20°.
4.1.2. Dynamic Characteristics and Time-Resolution Study
In the OSU experiment, unsteady data were obtained for the S809 airfoil model undergoing sinusoidal pitch oscillations with a comprehensive set of test conditions, including two angle of attack amplitudes, ±5.5° and ±10°; four Reynolds numbers, 0.75, 1.0, 1.25, and 1.4 million; three pitch oscillation reduced frequencies, 0.026, 0.052, and 0.077; and three mean angles of attack, 8°, 14°, and 20°. In the present study, the following conditions are selected for all of the validation simulations as well as the subsequent comparative studies: mean angle of attack α0 = 14°, angle of attack amplitude α1 = 10°, Reynolds number Re = 1.0 million, and reduced frequency κ = 0.077. The airfoil performs the sinusoidal pitch oscillation about its quarter chord point.
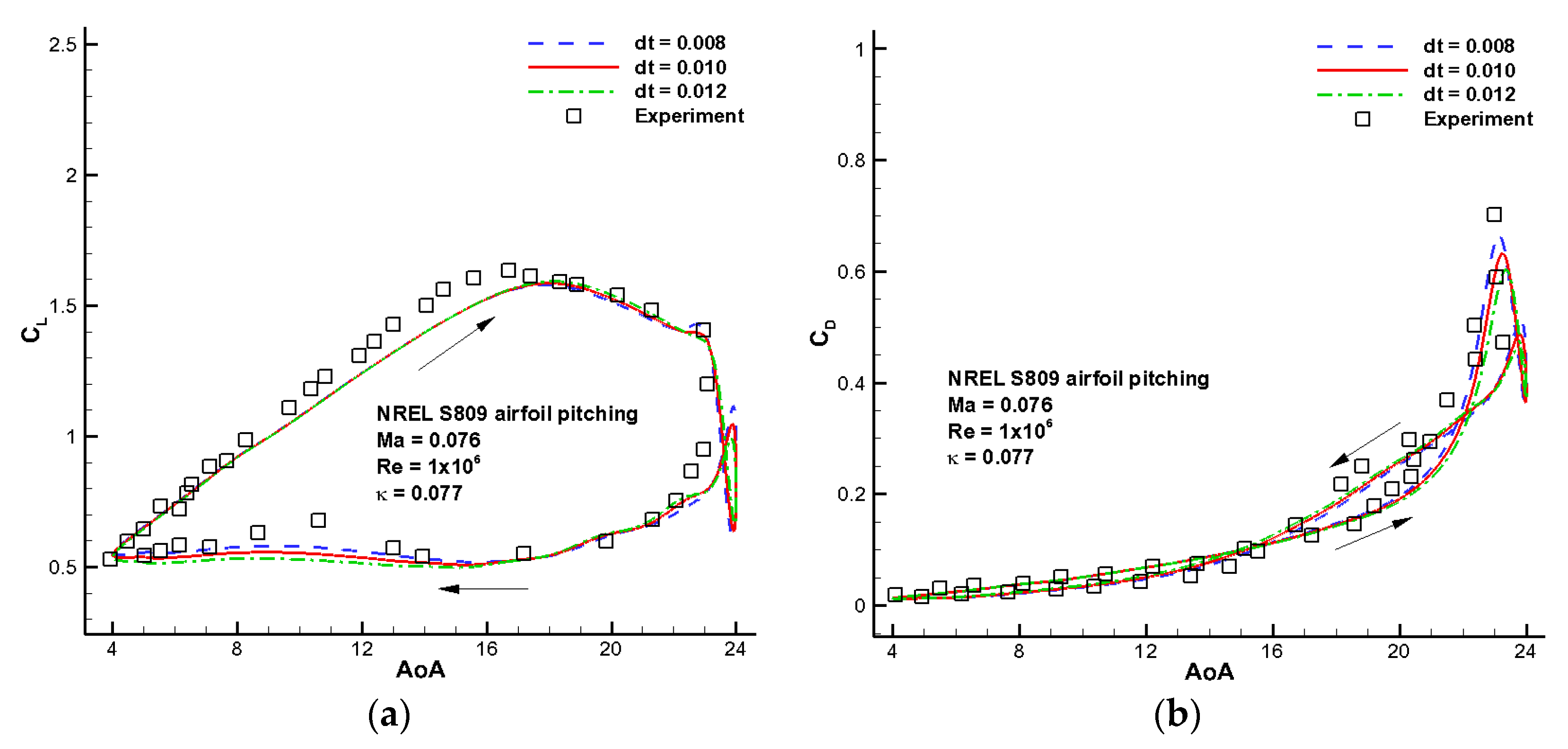
The simulations are performed using three different non-dimensional time steps (non-dimensionalized by
c/
V∞)
dt = 0.008, 0.010, 0.012, respectively, in order to investigate the time step sensitivity based on the aerodynamic coefficients. Four consecutive cycles are sufficient to obtain a periodic solution, and in the present study plotted curves are obtained from the fourth cycle. The comparison of numerical aerodynamic coefficients with experimental measurements are given in
Figure 6, showing a reasonably good agreement. Hysteresis is present in the aerodynamic force coefficient curves as well as the moment coefficient curve. It is also shown that smaller time steps have little effects on the accuracy of the results, and hence the middle time step of
dt = 0.010 is selected to carry out all the subsequent pitch oscillation cases for both the jet-off and jet-on configurations.
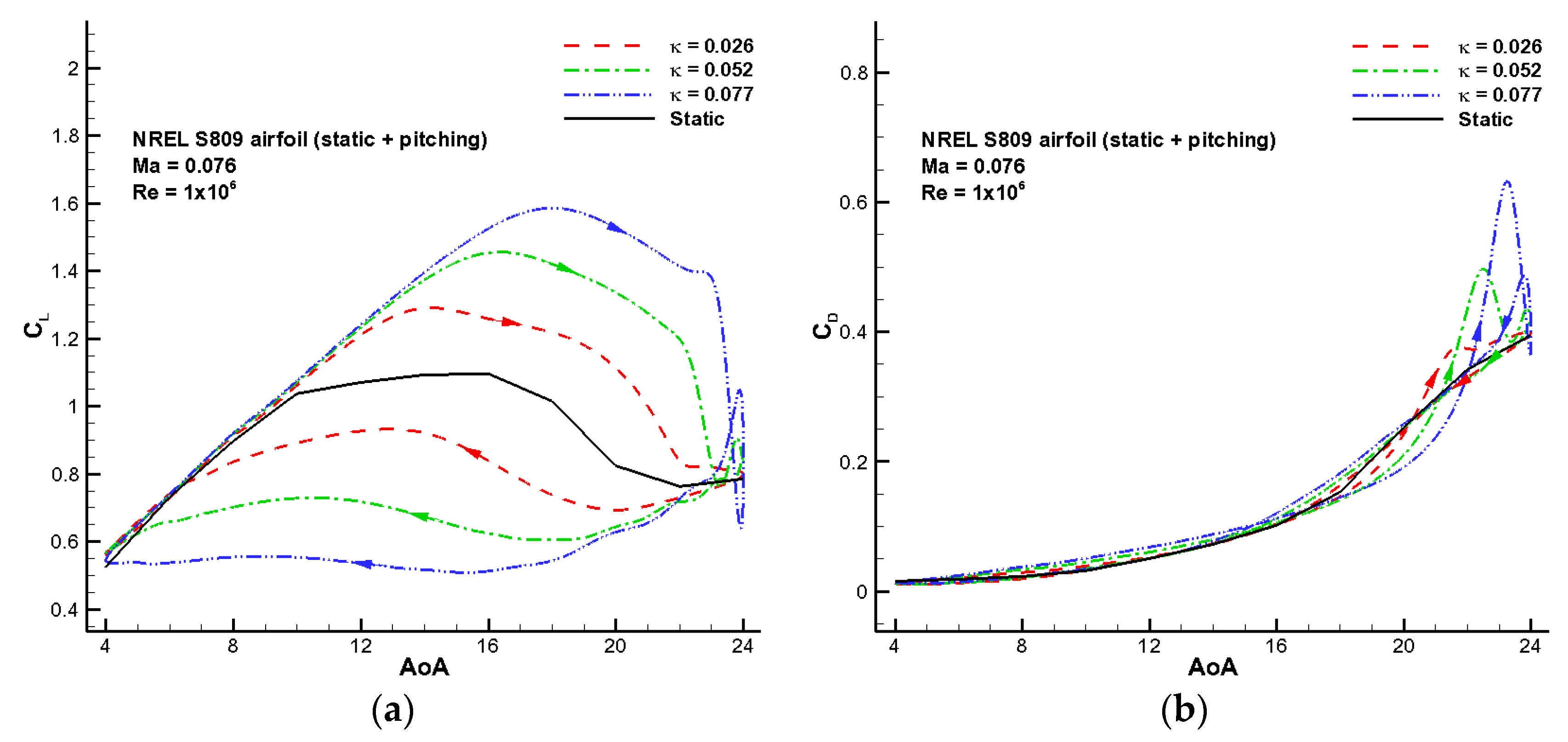
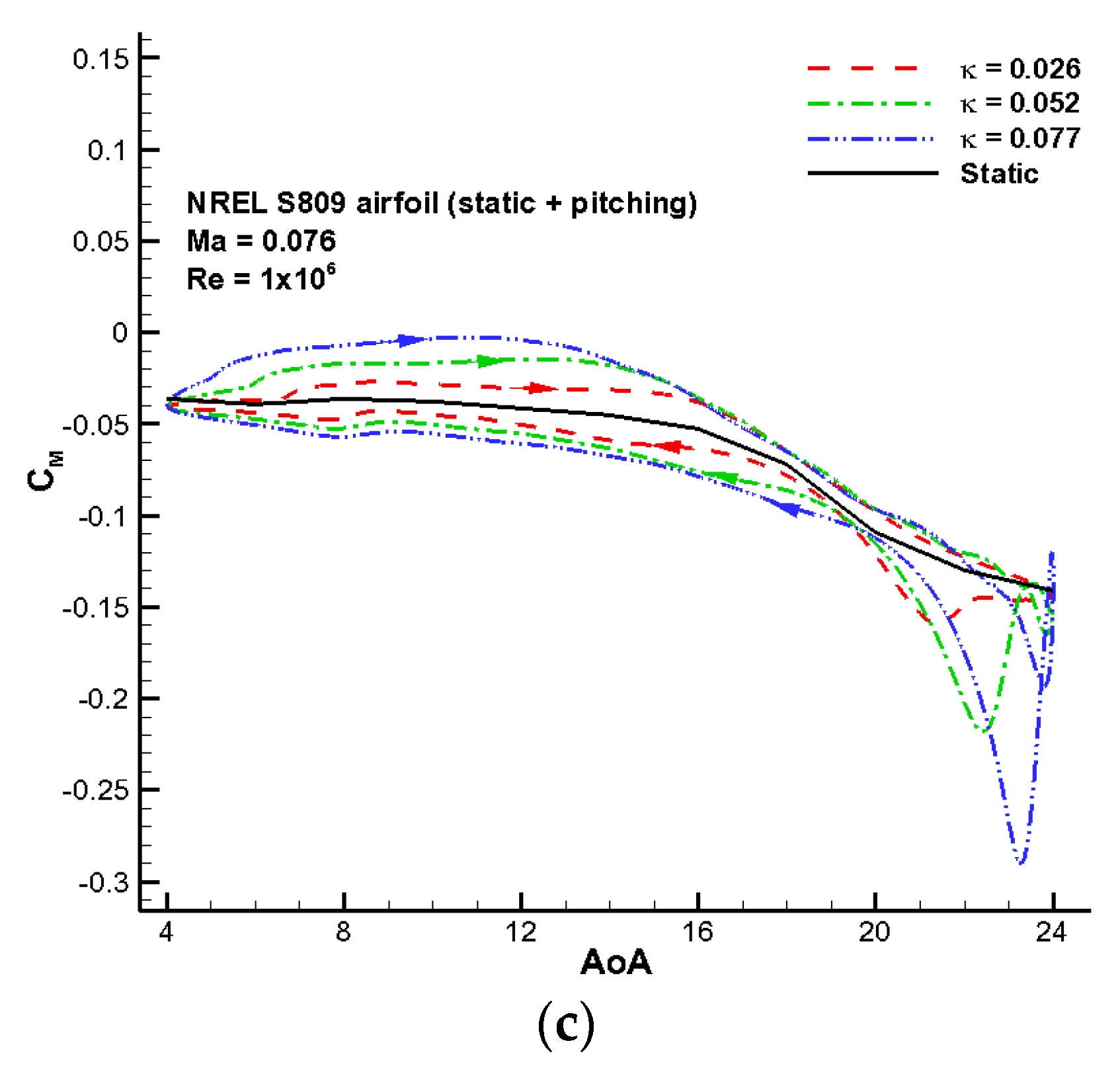
In
Figure 7, the calculated results of both static and oscillating motions at three reduced frequencies 0.026, 0.052, 0.077 are plotted together, in order to clearly exhibit the effect of oscillating motion and reduced frequency on the airfoil aerodynamic performance. It can be found that the motion of airfoil and the parameter of reduced frequency have a substantial impact on the flow field. The oscillating motion leads to the appearance of hysteresis loops for all aerodynamic coefficients, and a larger reduced frequency leads to a larger opening in the hysteresis loops. The highest lift coefficient obtained during oscillation is correspondingly much higher than its static counterpart. The higher the reduced frequency, the higher the highest lift coefficient. It is also shown that a higher reduced frequency can generate even larger drag and moment peaks at high angles of attack, causing a greater extreme aerodynamic load which could lead to structural fatigue or even worse the total damage of the structure. One purpose of the present research is to reduce this kind of fluctuating extreme aerodynamic load by implementing a co-flow jet on the airfoil suction surface and will be presented later.
4.2. CFJ Simulation and Validation
A CFJ airfoil based on the NACA 6415 airfoil was tested by Dano
et al. [
17] in the University of Miami 24″×24″ wind tunnel facilities. The CFJ airfoil was a NACA 6415 with the injection and suction located at 7.5% and 88.5% of the chord, respectively. The injection and suction slot heights were 0.65% and 1.42% of the chord. In the experiment, the CFJ is provided by a separated high pressure source for the injection and a low pressure vacuum sink for the suction. The injection and suction flow conditions were independently controlled. A compressor supplied the injection flow and a vacuum pump generates the necessary low pressure for suction. Both mass flow rates in the injection and suction slots were measured using orifice mass flow meters. More experiment details can be found in [
17]. The free stream Mach number was 0.03, and the chord-based Reynolds number was 195,000. The leading edge trip was used to achieve full turbulent boundary layer to be consistent with the CFD analysis. The open slot case in the experiment with momentum coefficient
Cμ = 0.08 is chosen to validate the present solver for CFJ simulation.
Based on the grid-resolution study in
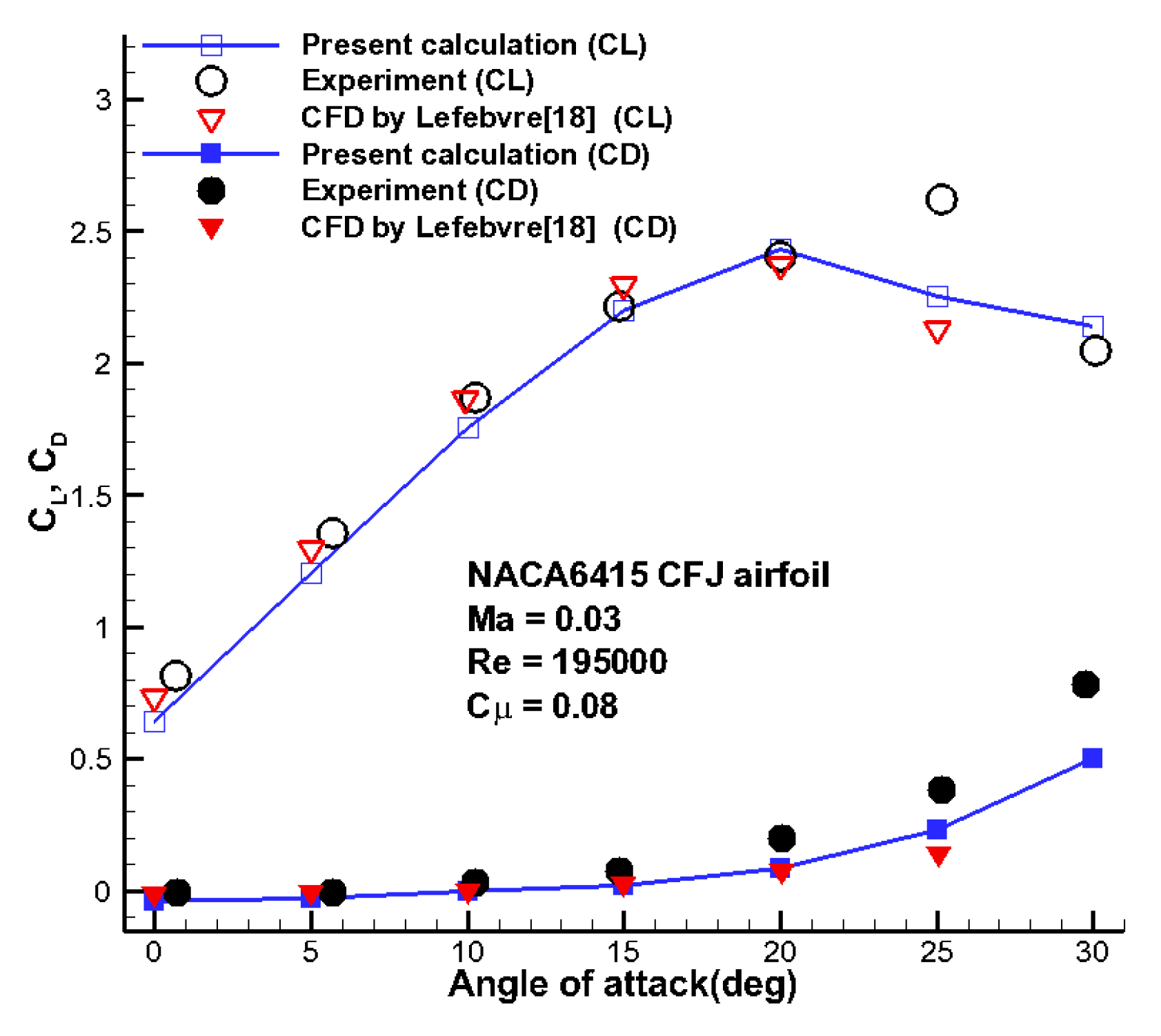
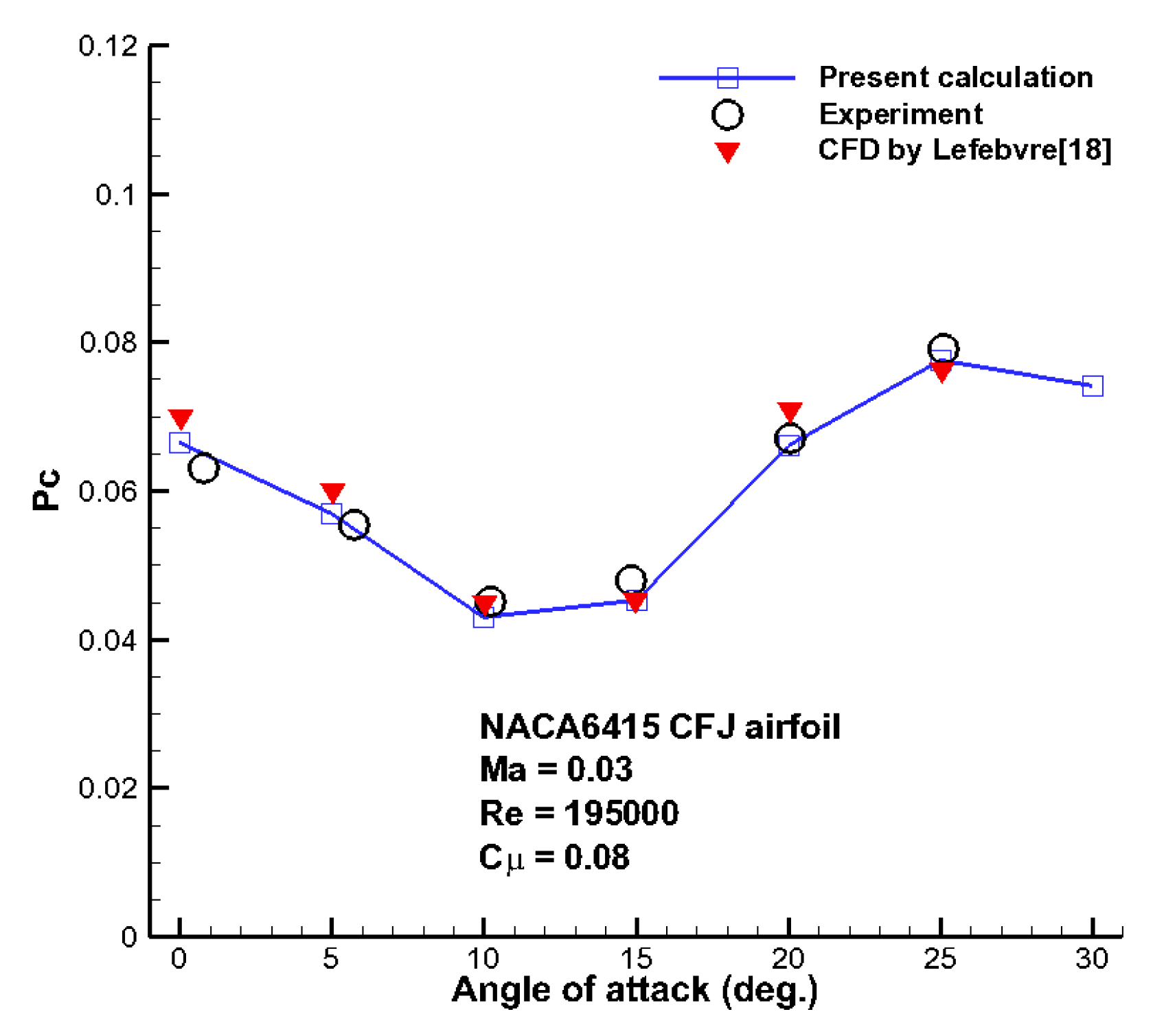
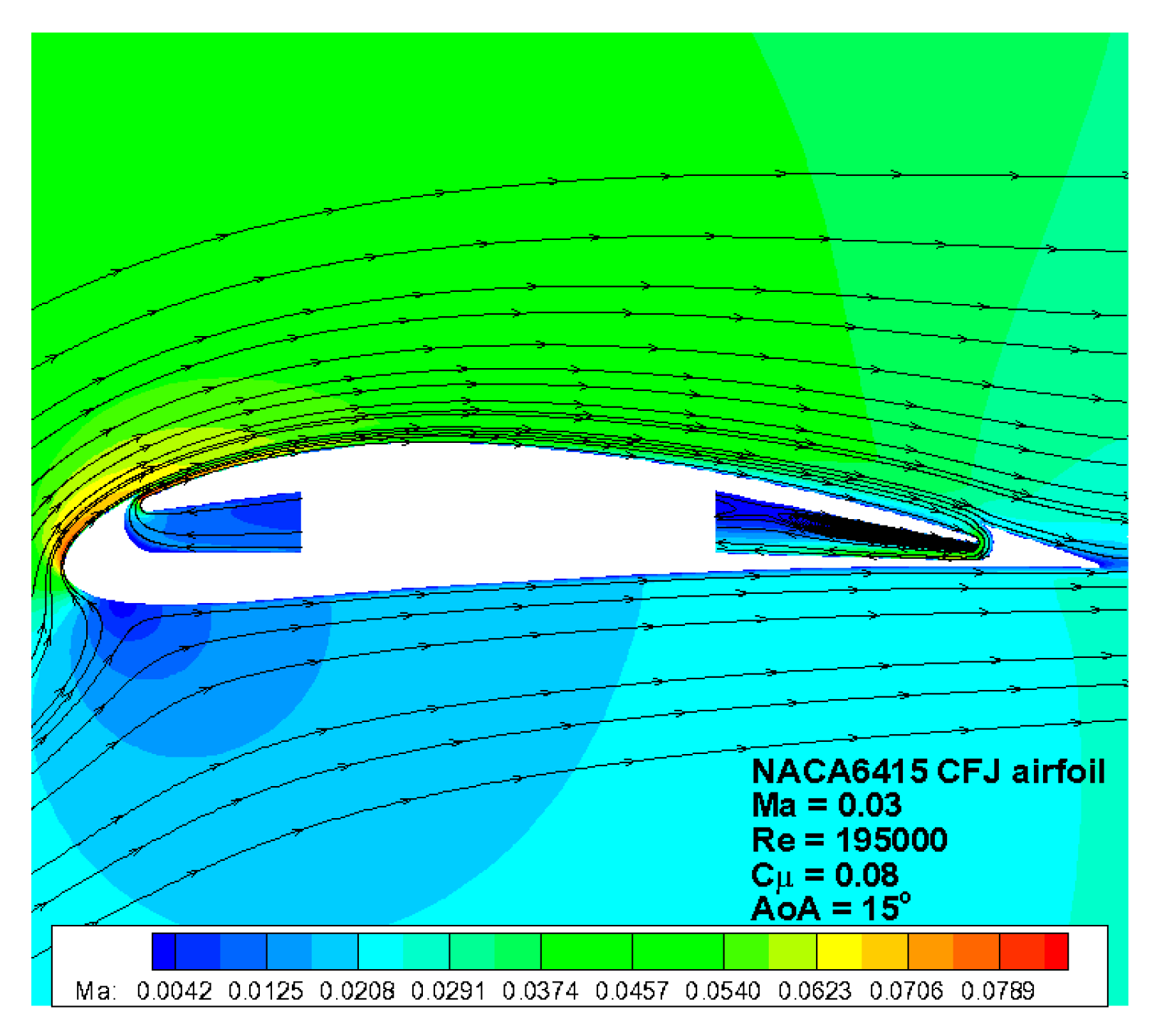
Section 4.1.1, the computational mesh for the present NACA 6415 CFJ airfoil is generated in a similar way according to the medium mesh for the NREL S809 CFJ airfoil. The computed lift, drag and power coefficients are presented in
Figure 8 and
Figure 9, and the flow field at AoA = 15° is shown in
Figure 10. The present numerical results are compared with experimental as well as CFD results by Lefebvre
et al. [
18], showing fairly good agreements, especially for the power coefficient. For the lift coefficient, good agreement is achieved up to the highest AoA of 30°, except AoA of 25° where the lift is underpredicted by the present solver as well as Lefebvre
et al. [
18]. The computed drag coefficient is underpredicted when the AoA is greater than 15°. Among the comparisons, the computed power coefficient agrees the best with the experiment. The reason may be that the total pressure and total temperature are integrated parameters using mass average, which is easier to predict accurately than the drag that is determined by skin friction and pressure distribution. Overall, it is demonstrated that the present solver can predict the CFJ flow with a fairly good precision, and it is reliable to be used for the present numerical study of CFJ.
4.3. Inactive CFJ Cases
The co-flow jet flow control concept has a distinct feature with a jet channel on a large portion of the airfoil suction surface by a translation and slight rotation operation. This channel is necessary for the co-flow jet concept. However, the presence of a channel inevitably affects the original well-designed aerodynamic performance of the baseline airfoil when the co-flow jet is inactive, since it has changed the aerodynamic shape of the airfoil. The effect of the presence of a channel on the static characteristics of airfoil has been investigated in a previous work [
21], showing that the channel will lead to a mild lift decrease, earlier stall, and drag increase. In the present study, the effect of a jet-off channel on the dynamic characteristics is studied by simulating the sinusoidal oscillation of the jet-off configuration at the same conditions as the baseline.
The numerical results are shown in
Figure 11, and are compared with the baseline results. For the lift coefficient, the jet-off cases have an overall lower value than the baseline, especially in the range of lower angles of attack during down-stroke motion. In the upstroke process, the lift coefficient is constantly lower than the baseline till the angle of attack about 20°, after which the lift increases to a peak even larger than the corresponding baseline, and then experiences a rapid drop. This drastic variation consequently causes corresponding peaks in the drag coefficient and moment coefficient hysteresis loops. That is to say, with the jet-off channel, the wind turbine airfoil will experience a more severe extreme air load in terms of drag and moment.
In the previous static study [
21], the force and moment coefficient peaks in the jet-off case were not present, and hence it is expected to be the reflection of the pitch oscillation effect on the flow. To make clear the reason of the peak’s existence, the flow fields and pressure coefficient distributions of six specific time locations are plotted in
Figure 12 and
Figure 13, respectively. The six time locations are denoted by
A,
B,
C,
D,
E, and
F in
Figure 11a, which cover the range of angles of attack that see the peak occurrence. For the purpose of comparison, the corresponding baseline flow fields and pressure coefficient distributions are also plotted in the same scale. At the time location
A, the flow pattern of jet-off case is similar to the baseline, except that a small recirculating region exists behind the injection slot surface. It can be seen from the comparison of pressure coefficient distribution in
Figure 13a that the presence of a channel results in a lower suction peak and a lower suction for a large proportion of the channel surface, causing the lift to decrease by a small amount, although the local suction is increased in the small recirculating region. Then the small standing vortex continues to increase in streamwise size as the angle of attack increases. At the time location
B, the front vortex develops enough to connect with the trailing edge vortex. At the time location
C, the front vortex and the trailing edge vortex start to combine together, causing the corresponding surface pressure lower than the baseline as shown in the comparison of pressure coefficient distribution in
Figure 13c. At the time location
D, the two vortices continue to merge, and the lift continues to increase. At time location
E, the two vortices completely merge into one larger vortex, causing the lift to reach a maximum. By comparing the Mach contours in
Figure 12i,j, it can be found that the flow velocity on the jet-off suction surface at the location about 70%
c from the leading edge is much larger than that of baseline, causing much lower pressure. The difference between the pressures of this particular part of suction surface is evidently the reason that the forces and moment reach a peak. After the formation of a single larger vortex, the lift starts to decrease rapidly due to the convection of the vortex into the wake. At the time location
F, the jet-off flow field presents a more complicated multiple-vortex feature, and the lift is lower than the baseline. Therefore, the dynamic process of vortex merging gives rise to the presence of peak which is a kind of extreme aerodynamic load.
4.4. Active CFJ Cases
As the main focus of present study, the dynamic characteristics of the S809 CFJ airfoil are investigated with three jet momentum coefficients
Cμ = 0.06, 0.09, 0.12.
Figure 14 shows comparison of unsteady aerodynamic characteristics between the baseline and CFJ cases with three momentum coefficients at Re = 1 × 10
6. The overall lift coefficients of the CFJ cases are much higher than that of the baseline, while the drag and moment coefficients of the CFJ cases are much lower than that of the baseline. It is obvious for the CFJ cases that the co-flow jet with a higher momentum coefficient has a greater ability in the lift enhancement, and results in a wider range of the linear portion of the lift coefficient curves. With increasing momentum coefficient from 0.06 to 0.12, the aerodynamic coefficient loops exhibit smaller hysteresis as expected. A stronger jet can suppress the separation at higher angles of attack. It can be found in
Figure 14a that for the CFJ case with
Cμ = 0.06, at higher angles of attack larger than 21° and during the down-stroke, the lift coefficient curve presents a flow-separation characteristic, indicating that this
Cμ level is not strong enough to suppress flow separation at angle of attack greater than 21°. However, for the case with
Cμ = 0.12, the lift coefficient curve does not present a noticeable stall feature, demonstrating that a stronger jet can fully control the dynamic stall.
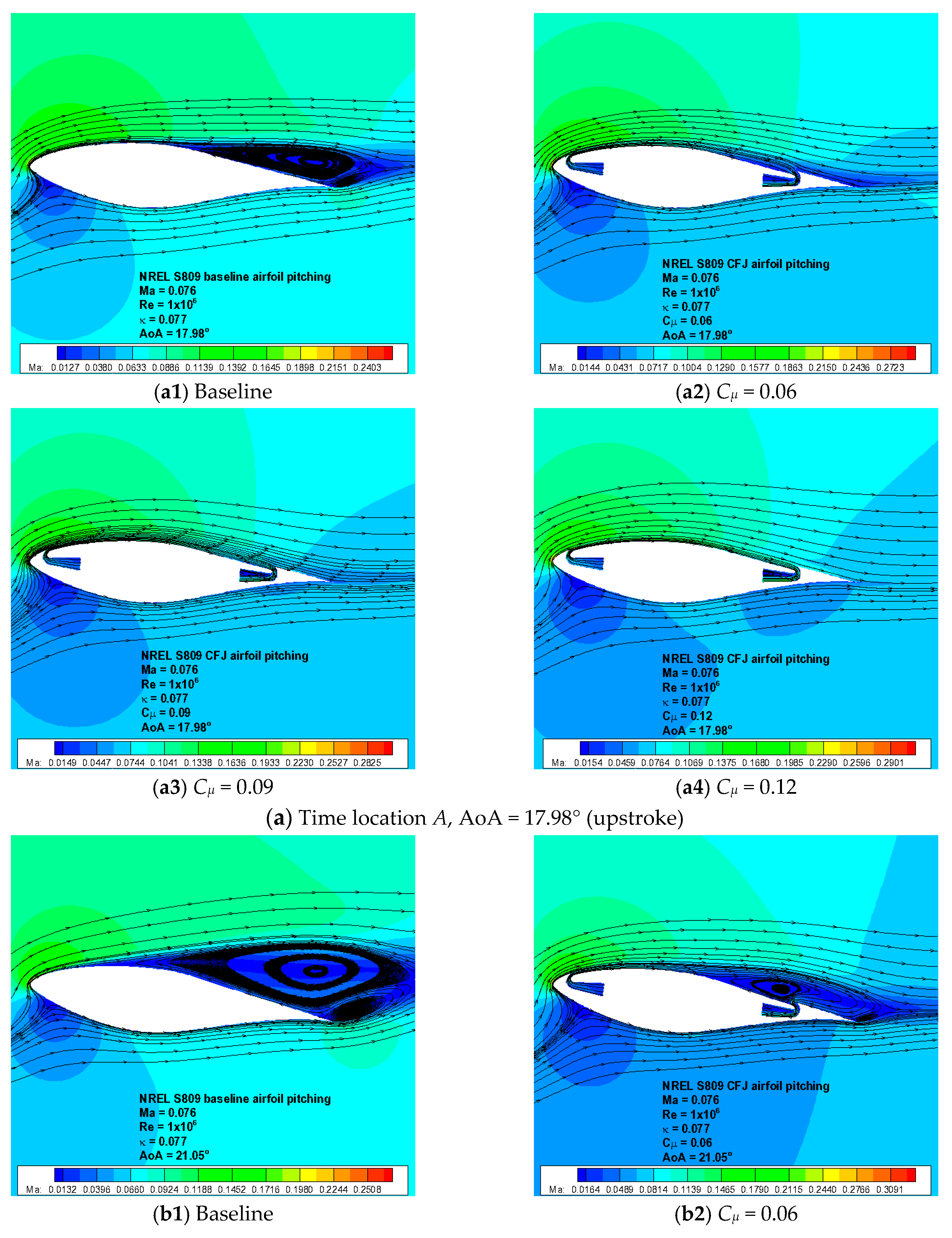
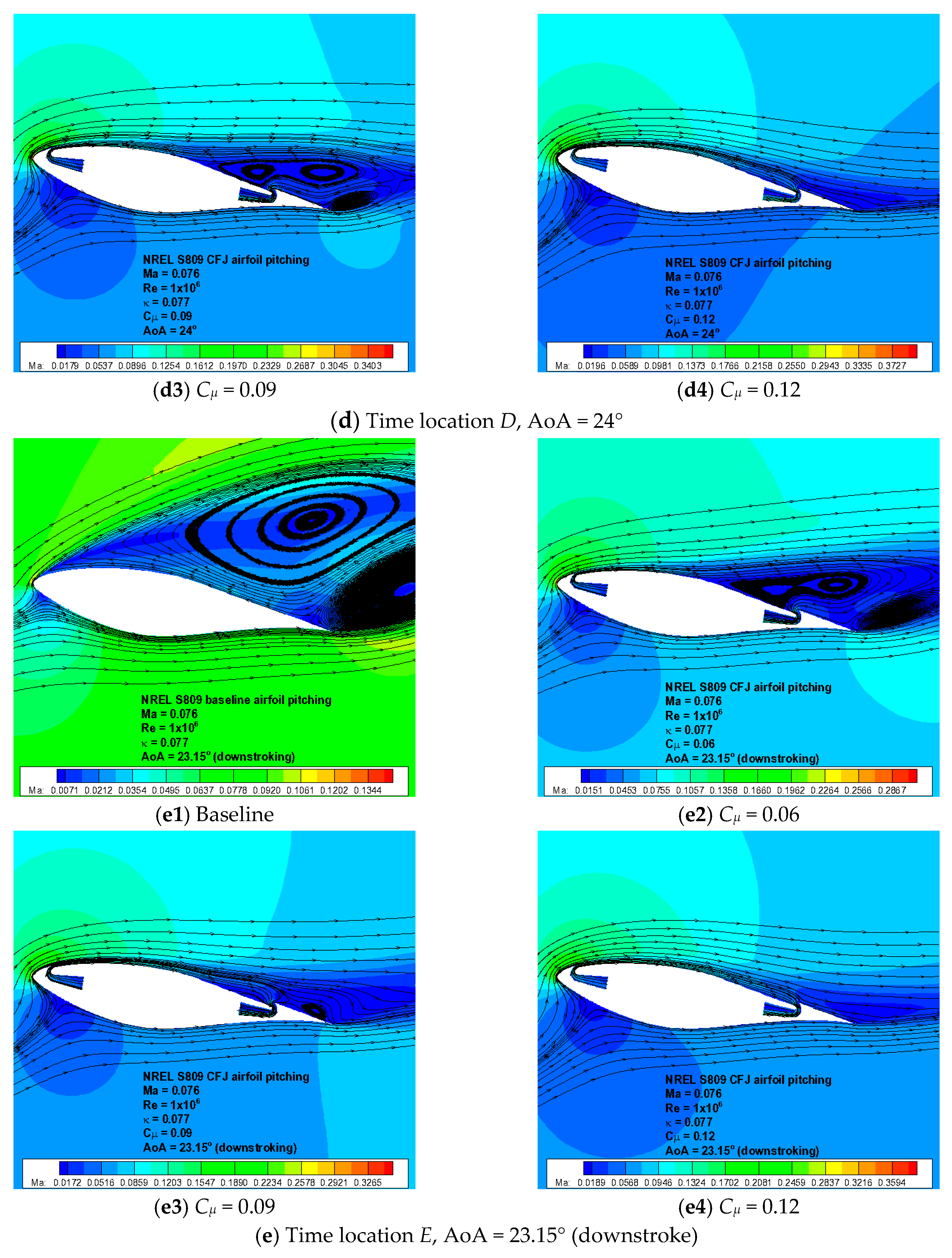
To show in detail and compare the abilities of co-flow jets with different
Cμ levels in suppressing separation at large angles of attack, five typical instantaneous time locations for the case of
κ = 0.077 are investigated in terms of flow field contours and streamlines as well as surface pressure coefficient distributions, as shown in
Figure 15 and
Figure 16. The five time locations are labeled in
Figure 14a. The lift coefficients of time locations
A,
B,
C are the highest values for the baseline, CFJ with
Cμ = 0.06, CFJ with
Cμ = 0.09, respectively. The angle of attack of the time location
D is 24°, the maximum of the investigated pitch oscillation motion. The time location E is the position that it is most likely to occur a separation flow since it is the locally lowest point in the down-stroke hysteresis loop. All the four cases of baseline,
Cμ = 0.06, 0.09, 0.12 are simultaneously investigated at each of the five time locations. In
Figure 15a, it is shown that the baseline has a mild trailing edge separation, whereas the CFJ cases with all the three
Cμ levels can completely suppress the separation. In
Figure 15b, the baseline experiences a massive separation, and the CFJ with
Cμ = 0.06 is not strong enough to suppress it. With stronger CFJ with
Cμ = 0.09 and 0.12, this massive separation can still be completely suppressed. In
Figure 15c, a stronger separation exists in the baseline case as well as the CFJ case with
Cμ = 0.06 due to the large angle of attack being 22.77°. But with a stronger CFJ with
Cμ = 0.09 and 0.12, the separation still disappears. In
Figure 15d, at the highest angle of attack in the pitch motion, the baseline, CFJ with
Cμ = 0.06 and 0.09 are all undergoing a separation, while the CFJ with
Cμ = 0.12 remains the ability of completely suppressing separation. At the down-stroke time location
E, the flow field with CFJ
Cμ = 0.12 remains attached, demonstrating a perfect performance of CFJ in suppressing dynamic stall.
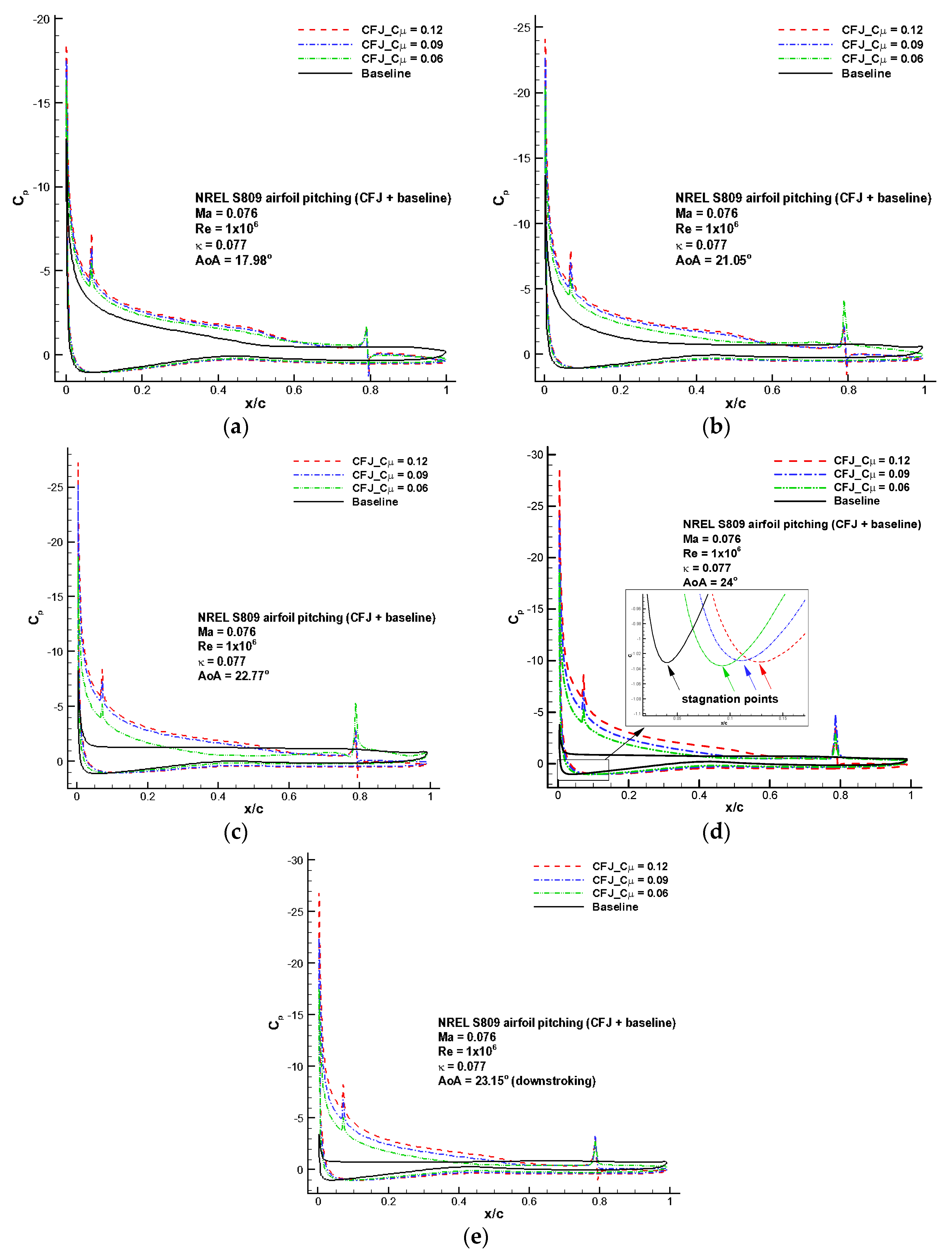
Figure 16 presents the corresponding pressure coefficient distributions for the five time locations, showing that enclosed area is larger for the cases with a higher jet momentum coefficient, representing a higher lift. From the view of the Kutta-Joukowski theorem [
35], a higher lift corresponds to a larger circulation, which is embodied in how far downstream the location of stagnation point is.
The time location
D is chosen to show this interesting phenomenon in
Figure 16d, which in the enlarged window shows that the CFJ case with the highest
Cμ = 0.12 has the most downstream stagnation point while the baseline has the most front stagnation point.
One purpose of the present study is to find out the performance of the CFJ in reducing the fluctuating extreme loads, especially the pitching drag force and moment.
Table 3 presents the amplitudes of the aerodynamic hysteresis loops for all cases with three different jet momentum coefficients, as well as the variation quantities of the amplitudes of the CFJ cases relative to those of the baseline. It is shown that the amplitude of lift coefficient can be significantly increased by implementing CFJ, while the amplitudes of drag and moment coefficients can be significantly reduced. The enhanced lift is beneficial for power generation, while the reduction of drag and moment is beneficial to the structural fatigue problem. The amplitude of lift can be enhanced by up to 51.14% in the CFJ case with
Cμ = 0.12, the amplitude of drag can be reduced by as much as 78.72% with
Cμ = 0.09, and the amplitude of moment can be reduced by 76.57% with
Cμ = 0.12, as shown in
Table 3. It should also be noted that in terms of drag and moment reduction, the CFJ with
Cμ = 0.09 and 0.12 have an equivalent ability, meaning that a stronger jet with
Cμ larger than 0.09 cannot necessarily result in a better performance in further reducing the amplitudes of drag and moment coefficients, although it may bring a further enhancement in lift. The amount of moment amplitude reduction only increases from 76.15% to 76.57% when
Cμ varies from 0.09 to 0.12, and the amount of drag amplitude reduction even decreases from 78.72% to 78.01%. Overall, the study exhibits a rather encouraging and desired result: the CFJ concept can greatly enhance the lift, reduce the fluctuating drag and moment, leading to a larger output of wind energy, while reducing the potential structural fatigue damage.
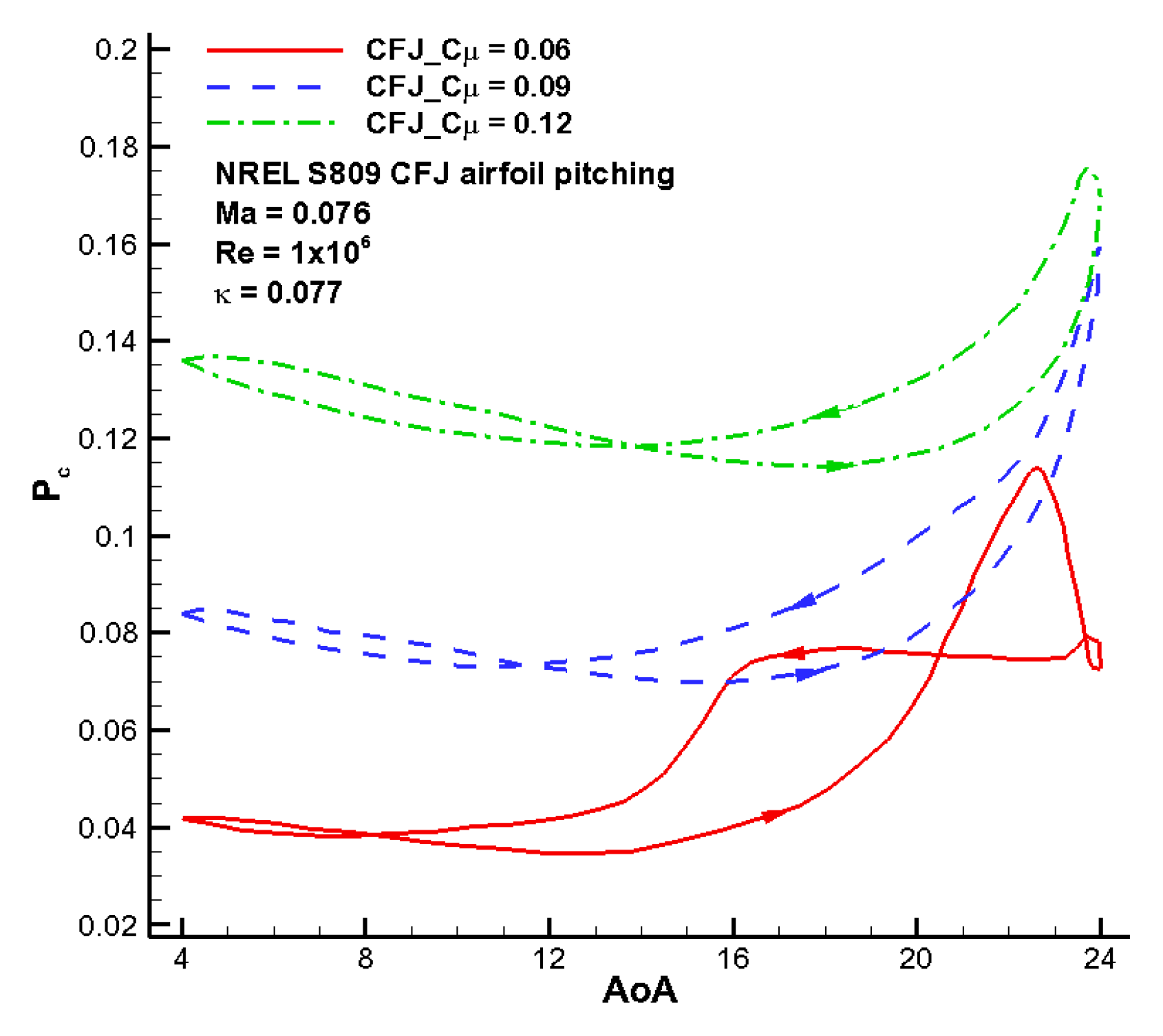
4.5. Energy Consumption Analysis
The consideration of energy cost of a flow control method is important in the all-round assessment of the method’s practicability and economy. As an active flow control method, the CFJ implementation needs a certain amount of energy input to perform its effect on the flow field.
Figure 17 gives the comparison of power coefficient hysteresis loops for all three
Cμ levels, showing that more power input is required to pressurize the jet flow for a higher
Cμ level jet. In the attached flow regime, the required power input decreases as the angle of attack increases. The reason is, from the view of airfoil aerodynamics, the pressure in the vicinity of the injection slot which is near the leading edge becomes lower when angle of attack increases, namely the suction peak becomes gradually higher with increasing angle of attack before the flow separates. The low pressure will benefit the power consumption, because the pump will perform less work to drive the jet flow. On the other hand, the pressure around the suction slot which is near the trailing edge is relatively higher due to the pressure recovery process on the airfoil suction surface. This higher pressure also makes it easier for the pump to suck flow from the suction slot. The combination of injection and suction takes full advantage of the pressure difference between the injection and suction slots, and hence results in relatively lower energy consumption. At very high angles of attack, the energy input increases with increasing angle of attack, regardless the flow is attached or separated. For the separated flow at the high angles of attack in the case with
Cμ = 0.06, the energy input reaches a peak during the upstroke process, while keeps at a nearly constant high level during the down-stroke process. Even so, the cycle averaged value of energy input of the case with
Cμ = 0.06 is still much lower than that of cases with higher
Cμ levels, which will be seen in
Table 4.
The analysis of energy consumption performance of the present two-dimensional CFJ implementation is given here based on an average estimation, and more comprehensive computation and analysis are left to be conducted in further three-dimensional wind turbine rotor simulation work.
Table 4 gives the time-averaged aerodynamic and power coefficients, which are calculated from one oscillation cycle. It is shown that the lift and power increase with
Cμ, while drag and moment decrease with
Cμ. The reduction of drag with increasing
Cμ is attributed to the contribution of jet reaction force. Indeed, the energy consumed by the pump is partly injected into the main flow and energizes the main flow as well as the boundary layer, resulting in a reduced drag.
For simplicity, assume that the free stream flow direction is perpendicular to the rotor plane with a magnitude of
(
V∞ is the local coming flow seen by the sectional airfoil, which is equal to 0.076 × 340 m/s = 25.84 m/s). Assume that the controlled S809 airfoil is located at a position that rotates at a speed equal to the free stream velocity. Hence, a decomposed component of airfoil lift by multiplying the total lift with
will contribute to the energy generation. Assume that the wind turbine efficiency of energy generation from the torque is
ηe = 0.85. Then the coefficient of rotor power generation
Pe by 2-D airfoil with unit span can be calculated by:
The power loss for pumping can be calculated in percentage of baseline rotor power by
The power gain through increased
CL,ave can be calculated by
Table 5 shows the power performance analyses for different
Cμ levels. It is shown that more power can be gained by using larger jet strength. However, it should be noted that the increase of net power gain from
Cμ = 0.09 to
Cμ = 0.12 is much lower than that from
Cμ = 0.06 to
Cμ = 0.09, implying that a too strong jet will not necessarily have a better performance, and there is an optimal jet strength choice.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}