1. Introduction
Due to its unique structure and working principle, the free piston engine has the advantages of mechanical simplicity, low frictional losses, high efficiency, high suitability for multi-fuel or homogeneous charge compression ignition (HCCI) operation, and low emissions [
1,
2,
3,
4,
5,
6,
7,
8]. The history of the research and development on free piston engines can be divided into two phases [
2]. Since Pescara invented the free piston engine in 1928, this type of engine developed quickly in applications like gas compressors or gas generators. However, limited by the factors summarised in [
2], the research on these types of free piston engines stagnated after the 1960s. In recent decades, dramatic developments in the technologies of electrical motors and electronic control have made it possible to address the research difficulties of free piston engines, and most importantly, extended the research concerns to applications of a free piston engine coupled with a linear motor or a hydraulic sub-system [
9,
10,
11,
12,
13,
14,
15,
16,
17,
18]. The compression ignition (CI) free piston engine coupled with a linear motor (FPLG) is the very type of free piston engine studied in this paper, and a detailed illustration of structure and the operating principle of this type of free piston engine can be found in [
2]. The CI FPLG has the characteristics of being difficult to start and control, crude combustion, and high cyclic fluctuations [
2,
19]. Thus, this type of FPLG requires accurate parameter matching, a new operation scheme and an advanced control strategy [
4,
5,
6,
14]. Previous literature studies on FPLG [
14,
19,
20,
21,
22,
23,
24,
25,
26,
27] mostly focused on spark ignition types. Some researchers performed research work on the hydraulic CI free piston engine (FPE), but nearly no reports are found on CI FPLG. In addition, we find in reports from the literature that both simulation and experiments on FPLG performed by related institutions are mainly focused on the systematic mechanism of the engine and there is essentially no specific research on the fuel injection strategy, which is very important for the starting and running performance of CI FPLG.
This paper mainly considers the study of the injection control strategies in the one-stroke starting process on CI FPLG prototype. For FPLG, there are two starting modes, one of which is the oscillation starting mode [
28],
i.e., the linear electric machine operates as a motor and drives the mover reciprocate left and right to compress the in-cylinder gas until the firing conditions are obtained. However, if the linear motor force is high enough to compress the gas to reach fire conditions in one stroke, then the FPLG can be started in the so-called one-stroke starting process. The one-stroke starting process can be described as follows: a linear motor drives the mover to compress the gas in the cylinder of one side (defined as “launch cylinder”), for example, for the LC in this paper, the fuel is injected into the cylinder at a proper moment. As the in-cylinder pressure and temperature of LC reach the ignition thresholds, the in-cylinder mixture will burn and expand to drive the mover to the other side; as a result, the engine begins to operate. The permanent magnet rod rigidly connecting to the pistons slides inside the linear generator’s stator coil, transforms the mover’s mechanical energy partly into electric energy and partly transfers to the opposed cylinder. The one-stroke starting process can shorten the starting time, and has a stronger robustness.
The fuel injection strategy involves the control of many parameters or items, such as injection timing, injection shape, injection pressure, injection pulse width, injection orifice diameter, injection angle, and injection fuel mass. Different injection parameters, which are related to several aspects of engine’s overall parameters, are set in the different design steps or operation conditions. The adjustable injection parameters must be optimised according to the operation conditions. Based on the basic model or existing scheme, sketchy parameters are selected to implement the simulation models; the results, such as indicated work and emission, will be used to optimise the scheme. Next, the optimised scheme will be applied on the prototype to obtain the test results, and the parameters are finally amended referring to the result. An injection fuel quality and injection timing map is obtained by varying the operation conditions and repeating the same process again.
Through calibrating in advance, the free piston control system adjusts the load, injection fuel value and injection timing to control the piston motion characteristics. While the injection fuel value is proportional to the energy released in the cylinder, the optimisation of injection timing corresponds to the in-cylinder combustion condition. According to the relevant literature [
14,
19,
20,
21,
22,
23,
24,
26,
27], almost all of the injection schemes use a position injection strategy,
i.e., when the piston moves to the set position, the fuel is injected into the cylinder. However, the motion characteristics of FPLG differ greatly from CE, and the details regarding the relationship between the injection position and the engine performance have not yet been reported. Another notable aspect is that the injection timing signal of CE is the crank angle value, which is not suitable for FPE. As mentioned above, the injection timing of FPE uses the piston position as the injection signal. However, under set conditions, while the piston velocity variation of CE with respect to the crank angle is very low, the variation and interaction of FPLG between cycles are obvious. Thus, even at the same position, the piston velocity may be very different, and the in-cylinder conditions, such as gas flow, differ greatly too. The in-cylinder gas flow condition has a great influence on combustion, and the piston velocity may better represent the in-cylinder gas flow condition. Thus, a question arises, is it better if the piston velocity signals are set as the injection trigger references? Based on the above analysis, this paper mainly considers two problems regarding the one-stroke starting process in a CI FPLG:
Using the piston position signal (“triggering position”) to trigger the injection system, study the characteristics of the one-stroke starting process.
Using the piston velocity signal (“triggering velocity”) to trigger the injection system, test if the velocity signal trigger is better.
In this research, a mathematical model is established based on the experimental rig; according to the mathematical model, the simulation model is designed and the model’s parameters are assigned after testing the the experimental rig parameters. Next, the in-cylinder gas pressure results of the simulation and the experiment are compared to verify the simulation model. Both the test and simulation methods are used to study the injection control strategy of the position feedback, and the simulation model is thus further amended. By differentiating the position signals with respect to the time interval and then smoothing it, a test of the velocity feedback injection control strategy is also performed. Finally, after analysing the results from the experiment and simulation, it is found that the strategy of velocity feedback can achieve a slightly higher IW and that the prototype can operate in a better status.
4. Results and Discussion
Both simulation and experimental studies are conducted in this research. By comparing the results, on the one hand, the simulation result can help select the proper operation parameters for the test, and can help judge the errors from operation or measurement; on the other hand, the experimental results can verify the model’s validity and precision and further improve the model for subsequent research. In order to understand the in-cylinder process intuitively. The reference position for the injection “triggering position” is at the exhaust port close position of the corresponding cylinder.
4.1. Position Feedback Injection Strategy
4.1.1. Comparison of Test and Simulation Results
Figure 8 shows the test result of the in-cylinder gas pressure dynamics under the condition of changing injection triggering position.
Figure 8a,b is the magnified views of in-cylinder gas pressure in the LC and the RC. To facilitate a comparison with the simulation model, the same changes of the injection triggering position are set in the model to obtain the corresponding in-cylinder gas pressure curves shown in
Figure 8c,d. The values and timings of peak in-cylinder gas pressure of the simulation model are found to be in approximate agreement with the test results. The imaginary lines, which indicate the variation tendency of LC and RC, are also in agreement between the simulation and the experiment. Thus, we determine that both the simulation and the test result are reasonable and that the simulation model is appropriate for use in studying injection control strategies.
4.1.2. Engine Performance Analysis
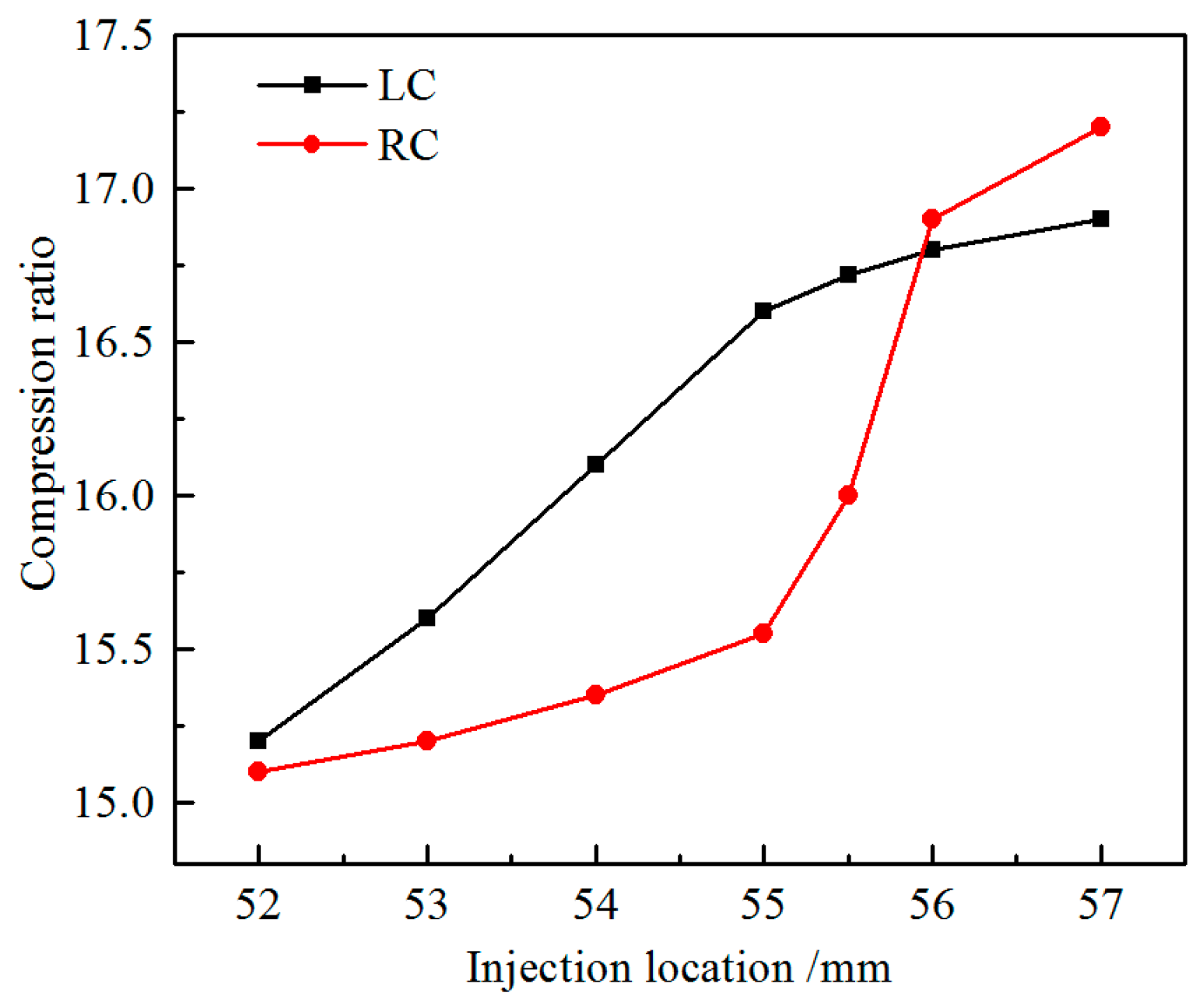
Without the crankshaft’s restraint, the compression ratio of FPLG is variable. On this test platform, the parameter can be calculated according to the mover position signal. Because the later ignition occurs before TDC, the compression ratio is higher.
Figure 9 shows that, as the “triggering position” value increases, the compression ratio of the LC and the RC both increase. However, the rates of increase of the compression ratios of the LC and the RC are different: with the “triggering position” value increasing from 52 mm to 55 mm, the compression ratio of the LC increases at a relatively higher rate and then increases at a lower rate, whereas the RC first increases at a lower rate and then increases at a higher rate. As the compression energy of the LC is from a linear motor, the force of the motor is limited, and when the compression ratio is high enough, the motor force and the mover’s inertia cannot compress the in-cylinder gas any further.
Regarding the RC, the compression work is from the IW of the LC, when the injection position value is less than 55 mm, although the IW of LC rises as shown in
Figure 10, relatively more IW of the LC is transformed into electrical energy consumed by the linear generator; thus, the compression ratio of RC rises slowly; when the “triggering position” value increases to between 55 mm to 56 mm, the good combustion heat release characteristic of the LC leads a higher growing rate of the compression ratio of the RC; when the ‘triggering position’ value increases to 57 mm, the IW of the LC decreases and the growth rate of compression ratio of RC reduces.
As shown in
Figure 11, the peak in-cylinder gas pressure of the LC decreases with the increase of the “triggering position” value.
As shown in Equation (12), the thermal energy increment of gas in the cylinder includes the compression work due to the reduced cylinder volume, the quantity of heat produced by fuel combustion, and the loss caused by heat transfer:
The in-cylinder pressure from the initiation of burning to TDC is caused by an additive effect of the gas compression, the increased amount of substances, and the heat release. For the “launch cylinder”, the released heat is the major contributor to the pressure. Earlier injection timing causes a large amount of the fuel to burn during the compression stroke, resulting in higher in-cylinder gas pressure.
Partly differing from the LC, the peak in-cylinder gas pressure of the RC increases as the “triggering position” value changes from 52 mm to 55 mm, and then decreases if the “triggering position” value exceeds 55 mm. This behaviour occurs because, without the flywheel (energy storage equipment) and crankshaft’s restraint, the IW of the LC is partly converted directly into the compression energy of the RC. Thus, the in-cylinder gas pressure of the RC is mainly affected by both the IW variation of the LC and the injection timing variation of the RC. In addition, in the “triggering position” range of 52 mm—55 mm, the IW increase of the LC is the main cause of the increase of the peak in-cylinder gas pressure of the RC. When the injection position value is over 55 mm, the injection timing becomes the primary reason why the peak in-cylinder gas pressure of the RC decreases.
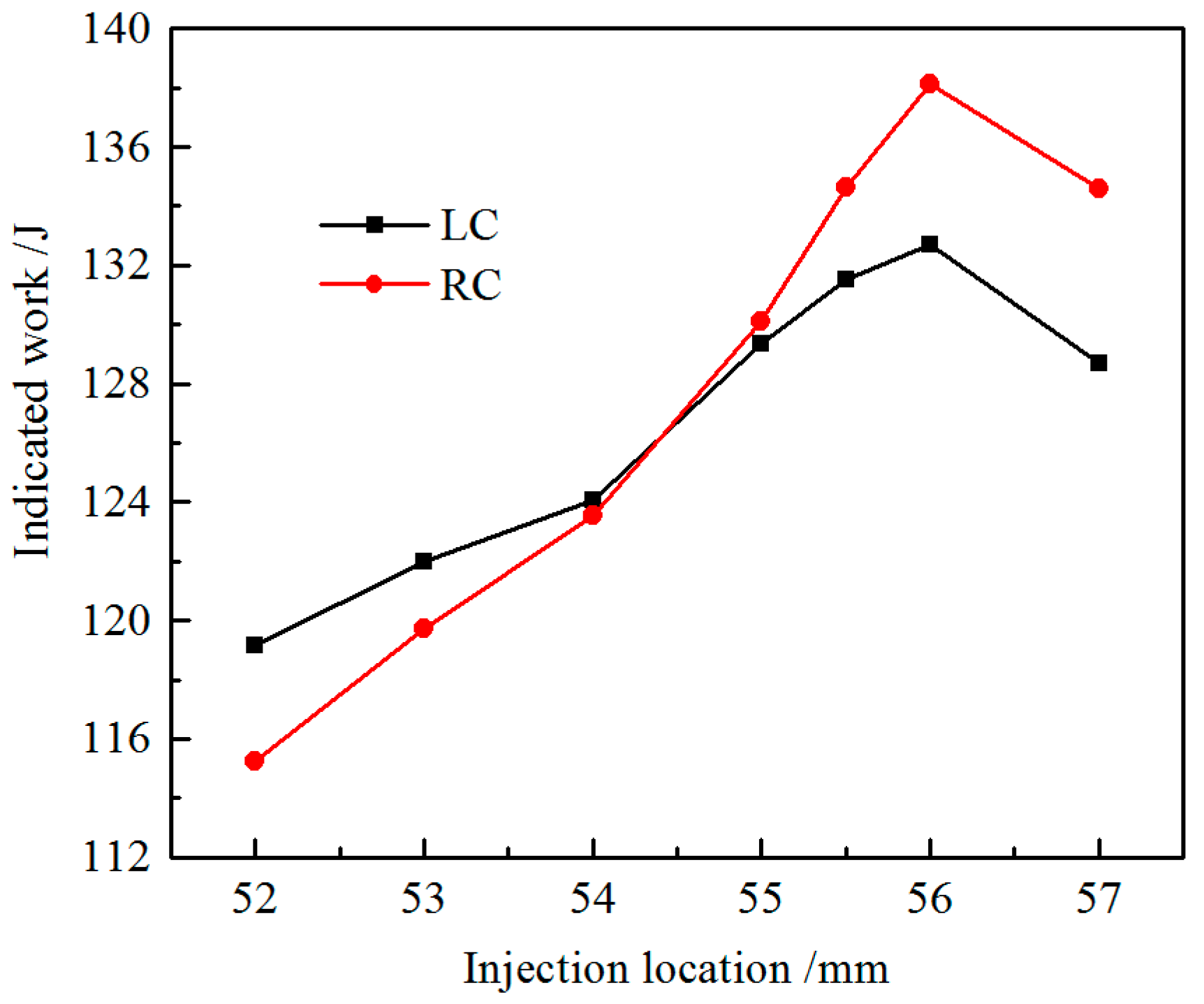
Based on the in-cylinder gas pressure and the mover position data, the IW can be calculated as a means to represent the work features of two cylinders. As shown in
Figure 10, when the “triggering position” value is approximately 56 mm, the IW of the LC and the RC both achieve the maximal values (132.7 J of LC and 138.1 J of RC). This behaviour occurs because of the following processes: when the injection timing is too early, the poor combustion condition and the compression negative work cause the loss of the IW; when the injection timing is too late, a large fraction of the fuel is ignited after TDC and the constant volume degree of combustion declines, thereby causing the reduction of IW. We also find that when the “triggering position” increases before 56 mm, the IW of the RC increases more quickly than that of the LC. As mentioned above, in the expansion stroke of the LC, the piston assembly motion is directly affected by the IW of the LC; the increase of the IW of the LC increases the compression ratio and the peak in-cylinder gas pressure of the RC, thereby causing the IW of the RC to increase. In addition, the increase of the “triggering position” value of the RC also increases the IW of the RC,
i.e., both of these factors lead to the higher rate of increase of the IW of the RC. Certainly, this phenomenon reflects the one-stroke starting process mechanism, rather than the performance differences of the two cylinders.
According to analysis described above, in the starting process under the position feedback injection strategy, the change laws of the compression ratio, the peak in-cylinder gas pressure, and the IW of the “launch cylinder” LC, along with the change of the “triggering position” values, are similar to the change laws of the CE. However, because of the characteristic of FPLG, the laws of the RC are different from the laws of the CE. For example, the shape of the peak in-cylinder gas pressure of the RC has the form of a parabola. In the one-stroke staring process, because the compression energy of the LC is from a motor, the characteristics of the LC are partly related to the linear motor force; the characteristics of the RC can reflect the FPLG operation features under the condition that the one-stroke starting succeeds in the LC. Considering the variation tendency of the IW, the “triggering position” value of 56 mm is optimised for the one-stroke starting process under this strategy.
4.2. Velocity Feedback Injection Strategy
During the research process, using the position feedback injection strategy, we found that after starting the engine, the prototype frequently misfired. As mentioned above, this phenomenon is mainly caused by the characteristics of FPLG, such as high interaction between cycles, high variation, and instability. At the same position, the mover’s velocity may vary substantially, and thus the in-cylinder conditions differ substantially as well.
For the FPLG, because of the lack of mechanical restraint, the thermal energy produced by combustion is first converted into the mover’s kinetic energy; thus, the mover’s velocity is relative to the last cycle’s combustion condition, and the interaction between cycles is caused by the mover’s motion. Thus, the velocity signal reflects the operation condition of the prototype, and an injection system using the velocity signal to optimise the injection timing should improve the operation performance.
This injection strategy uses the mover’s velocity directly: when the mover’s velocity reaches the pre-set “triggering velocity”, fuel is injected into the cylinder. In this research, we first run the simulation model to analyse this strategy briefly and obtain a feasible experimental parameter scheme; afterwards, the test result is obtained by conducting a series of tests.
4.2.1. Injecting at the Same “Triggering Velocity”
In this case, the “triggering velocity” values of the two cylinders are set to be the same. After modifying the simulation model in injection triggering mode and some other specific details, the simulation model was run.
Figure 12a shows the values of the feature points, such as injection timing, exhaust port opening timing, and TDC. We find that in this “triggering velocity” range, as the “triggering velocity” value increases, the piston reaches the LDC and the RDC in advance, and the position value of the LDC decreases whereas that of the RDC increases.
Figure 12b shows that, along with the increasing of the triggering velocity, the peak in-cylinder gas pressure of the LC declines in a linear tendency, whereas that of the RC increases linearly. As the “triggering velocity” value increases, the differences between the in-cylinder gas pressures of the two cylinders become obvious. The phenomenon is partly caused by the different compression work sources of the two cylinders during the one-stroke starting process--the gas of the LC is compressed by the motor force and that of RC is compressed by the IW of the LC. The compression work can influence the mover’s motion, and the motion characteristic will influence the combustion further.
According to the simulation results, when there is a big substantial difference of in-cylinder gas pressure between the two cylinders, the peak in-cylinder gas pressure can reach 14.7 MPa, which far exceeds the maximum gas pressure value under the injection strategy of position feedback.
Because the injection timing is determined based on the kinetic energy of the mover, the combustion condition is supposed to be less sensitive to cycle variation of the mover’s motion. Thus, the combustion efficiency of this strategy may be higher than that of the other control strategy.
4.2.2. Injecting at Different “Triggering Velocity” Values
Considering the asymmetry of the two cylinders above, in this part, the “triggering velocities” of two cylinders can be set as different values; thus, the difference problem between the two sides can be restrained.
The IW is calculated to estimate the engine’s performance under the injection strategy of velocity feedback and to make a comparison with the position feedback injection strategy.
Figure 13 shows the IW of the LC
vs. “triggering velocity”, and
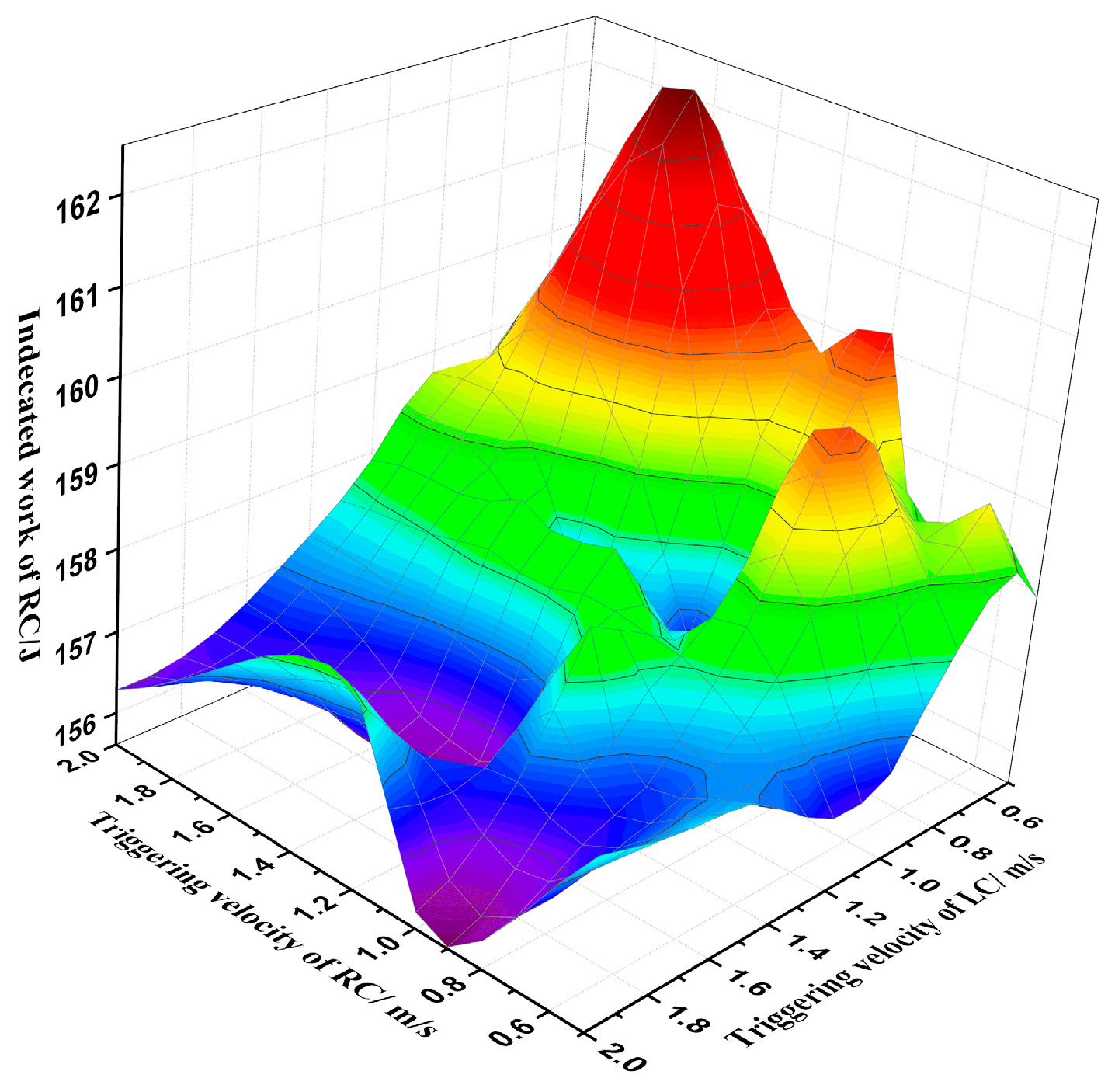
Figure 14 shows the map of the IW of the RC
vs. the two cylinders’ “triggering velocity” values.
The IW of the LC exhibits a monotonic decreasing trend with the increase of “triggering velocity”. The greater “triggering velocity” of CI FPLG correspond to the greater fuel injection advance angle in a conventional engine. This phenomenon is the reason for the trend shown in
Figure 13. To be specific, the higher triggering velocity indicates that more fuel is ignited before TDC; thus, the compression negative work and heat transfer losses reduce the IW.
The IW map of the RC presents a “hump” shape. As analysed above, the IW of the RC is affected by both the IW of the LC and the “triggering velocity” of the RC; thus, the appearance of two peaks is reasonable. The peak value of IW of the RC reaches 174.8 J, thus, the IW in this strategy is greater than that in the injection strategy of position feedback.
By differentiating the position signal with respect to the sampling time interval, the controller can use the velocity signal to trigger the injection system. After setting different “triggering velocity” schemes of the two cylinders, we conducted a series of tests. On the basis of the in-cylinder gas pressure data and the piston position data, the IW of the RC and the LC were calculated.
Figure 15 shows that the IW tendency of the LC coincides with the simulation result. To compare the IW of the RC with the simulation result, we convert the final test result of the three-dimensional vector (“triggering velocity” of the LC, “triggering velocity” of the RC, IW of the RC) to matrix gridding using the interpolation method. Comparing
Figure 16 with
Figure 14, we find that the map shape of the test result is similar to that of the simulation, and the peak value is approximately 162.3 J, with an error in a reasonable range.
Figure 17 shows the contrast diagram of the in-cylinder gas pressure under the same experimental condition for the two injection strategies. On the basis of the injection strategy of position feedback, the operation condition of this prototype is extremely unstable (the controller drives the motor automatically when the peak in-cylinder less than a pre-set value). In contrast, for testing with the injection strategy of velocity feedback, the prototype can achieve a better starting condition and is able to continuously operate over dozens of cycles. This test result not only verifies the feasibility of using velocity as the injection triggering signal but also indicates that the strategy may provide advantages, according to the characteristics of the FPE.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}