
A Study on a Linear Magnetic-Geared Interior Permanent Magnet Generator for Direct-Drive Wave Energy Conversion

Abstract
:1. Introduction
2. System Configuration and Operation Principle
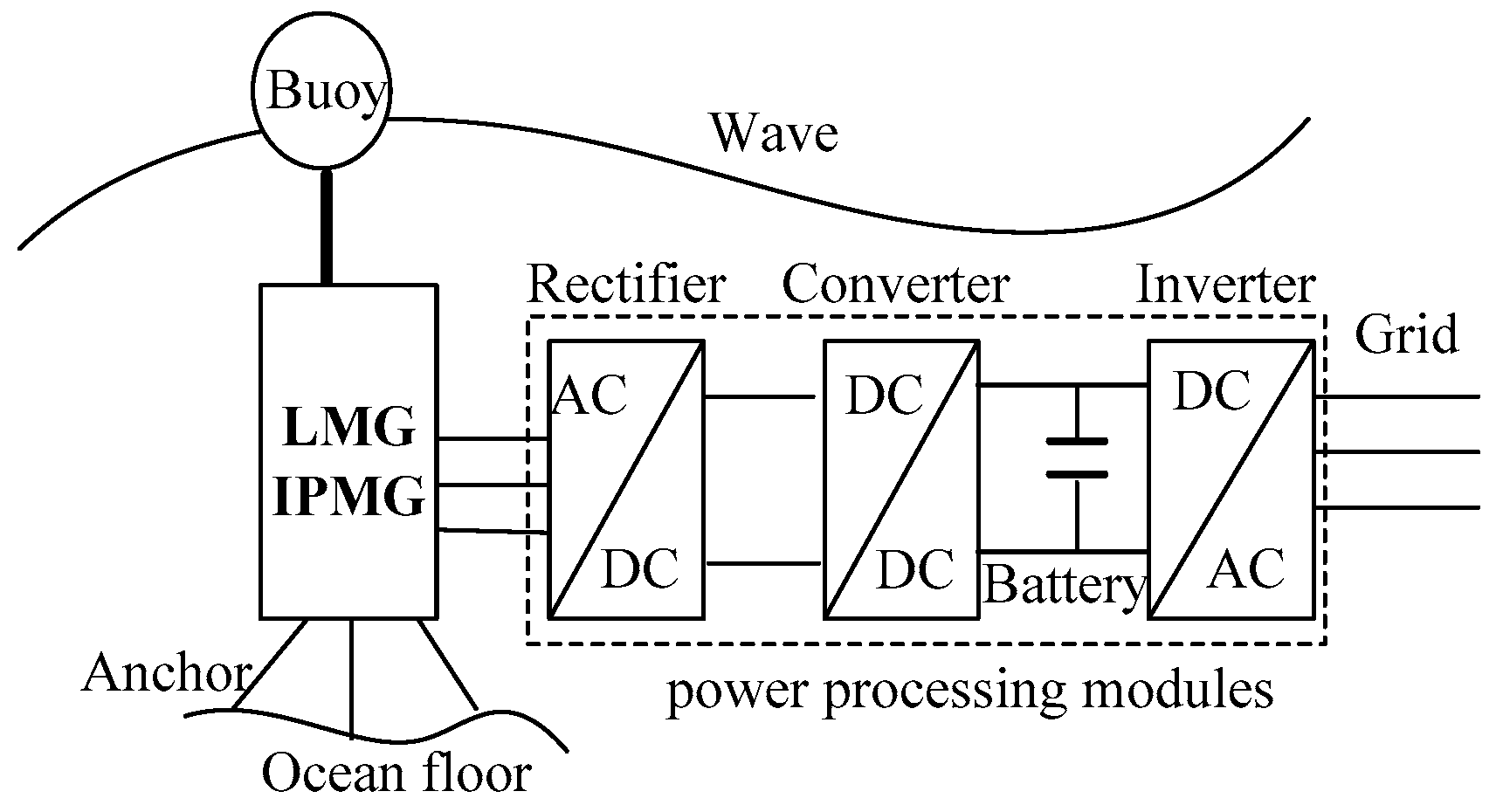
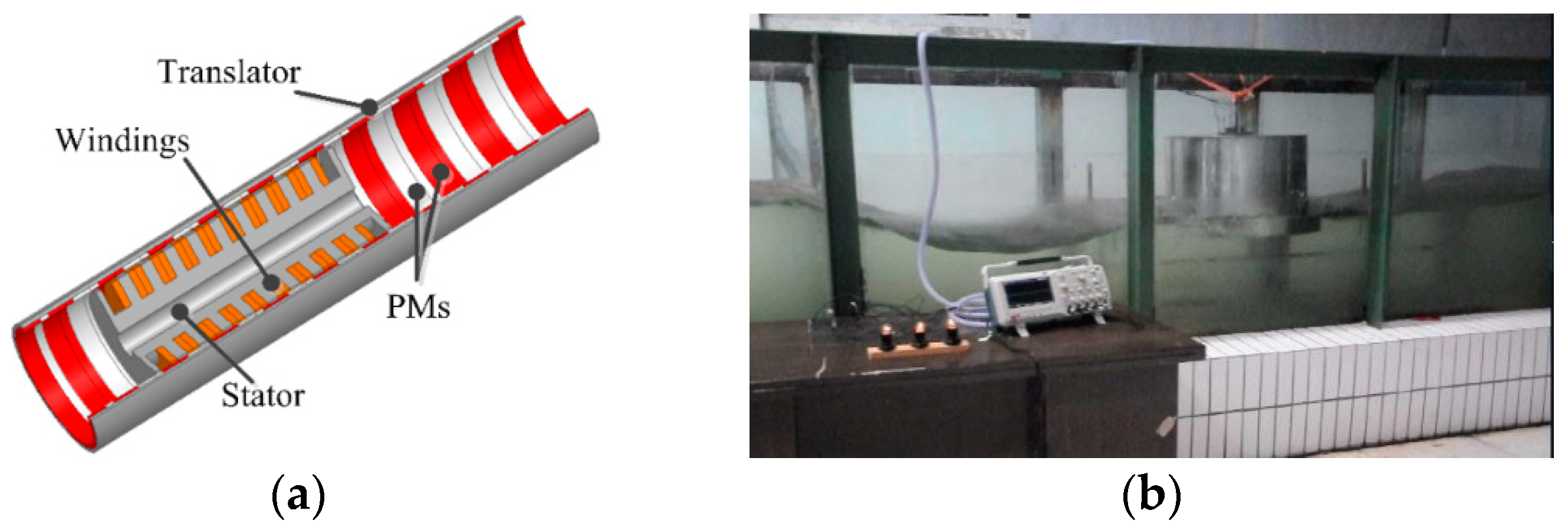
2.1. System Description
2.2. Operational Principle of LMGIPMG
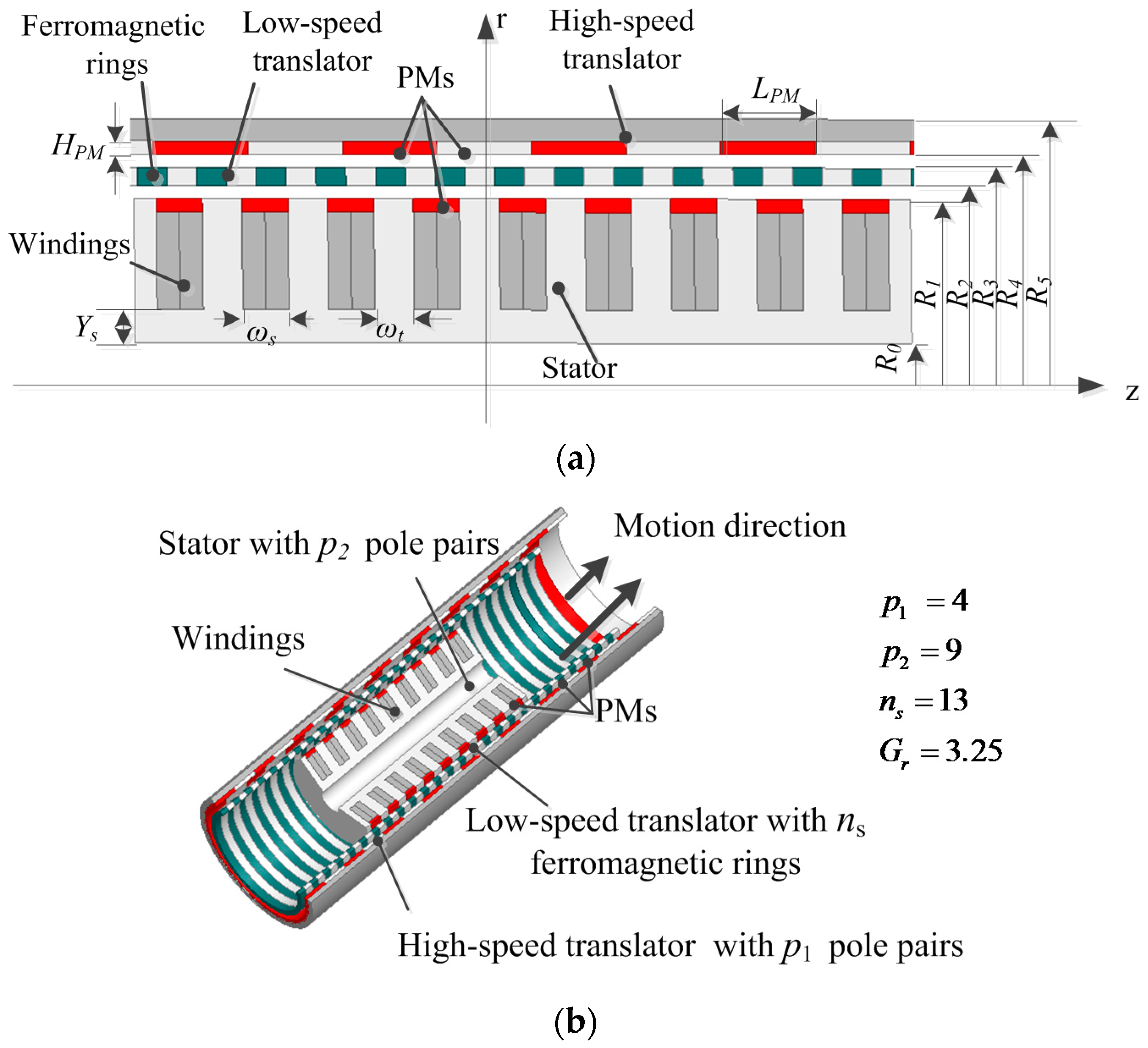
2.3. Machine Design and Parameters
3. Performance Analysis
3.1. Magnetic Field Distribution
3.2. Force Characteristics
3.3. Performance Analysis at a Constant Speed
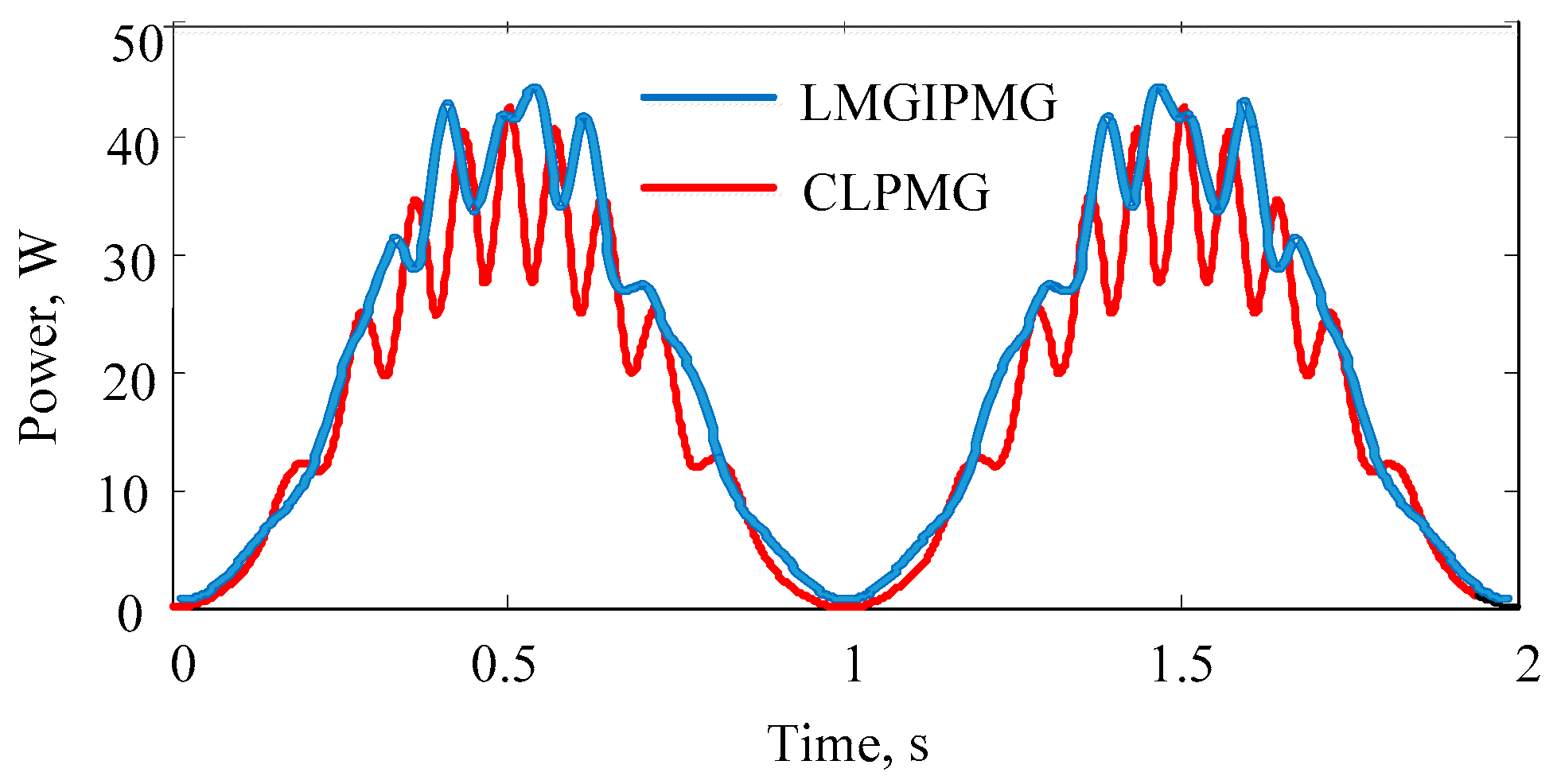
3.4. Performance Analysis at a Sinusoidal Speed
4. Comparison Results
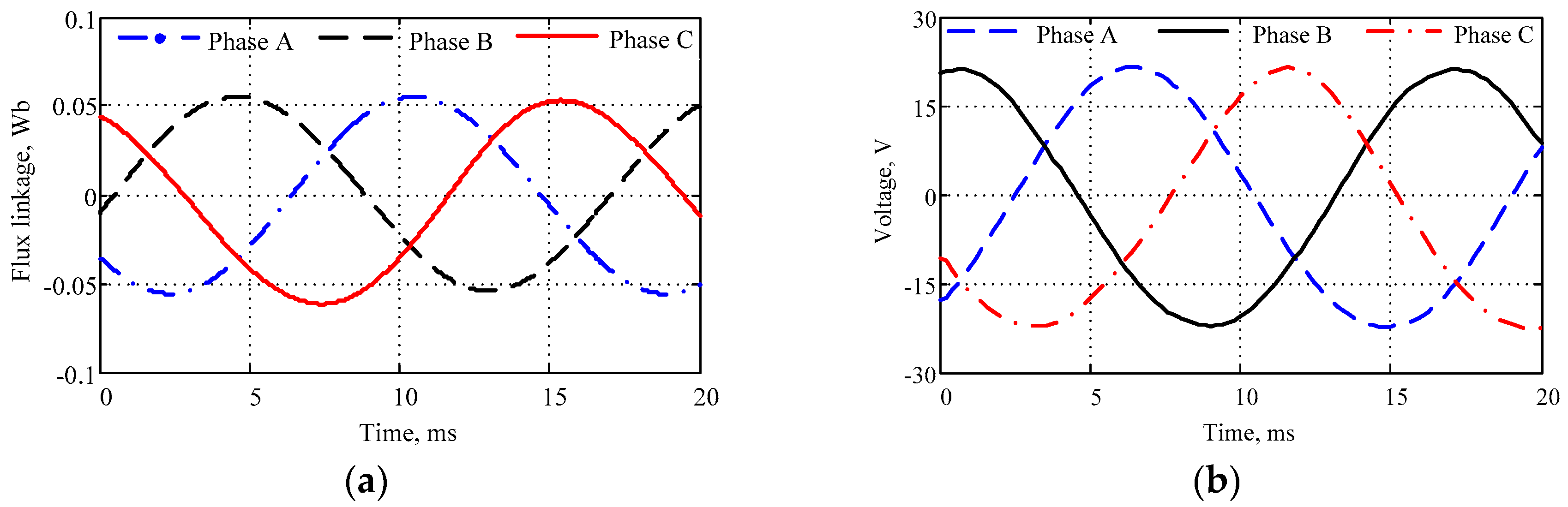
4.1. Three-Phase EMF
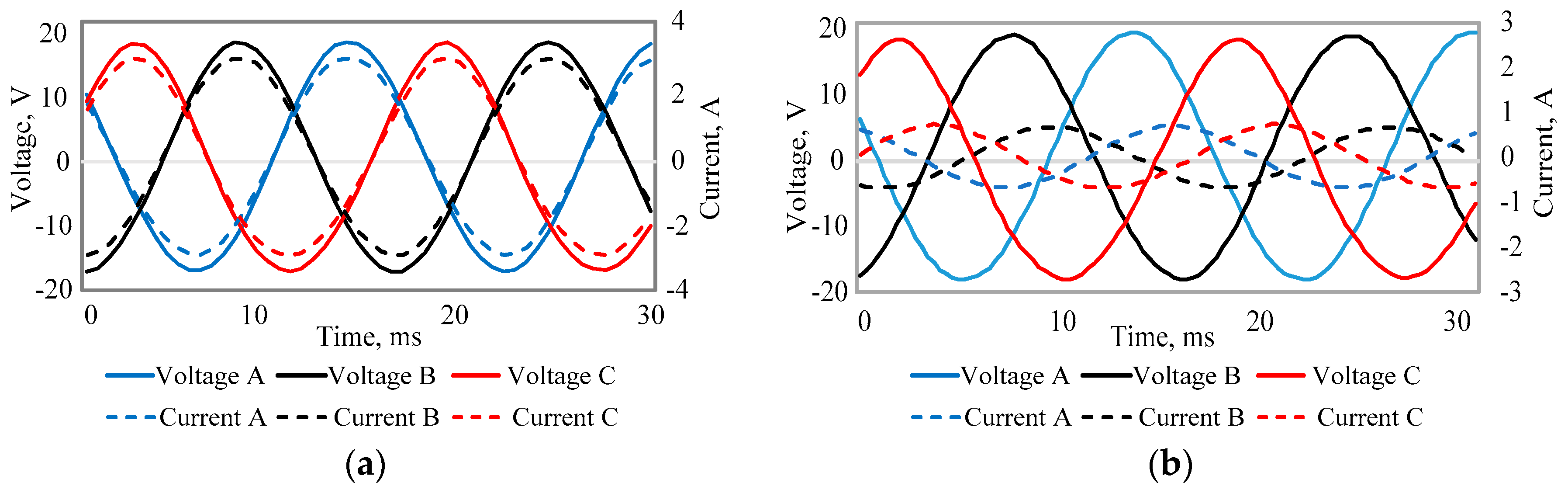
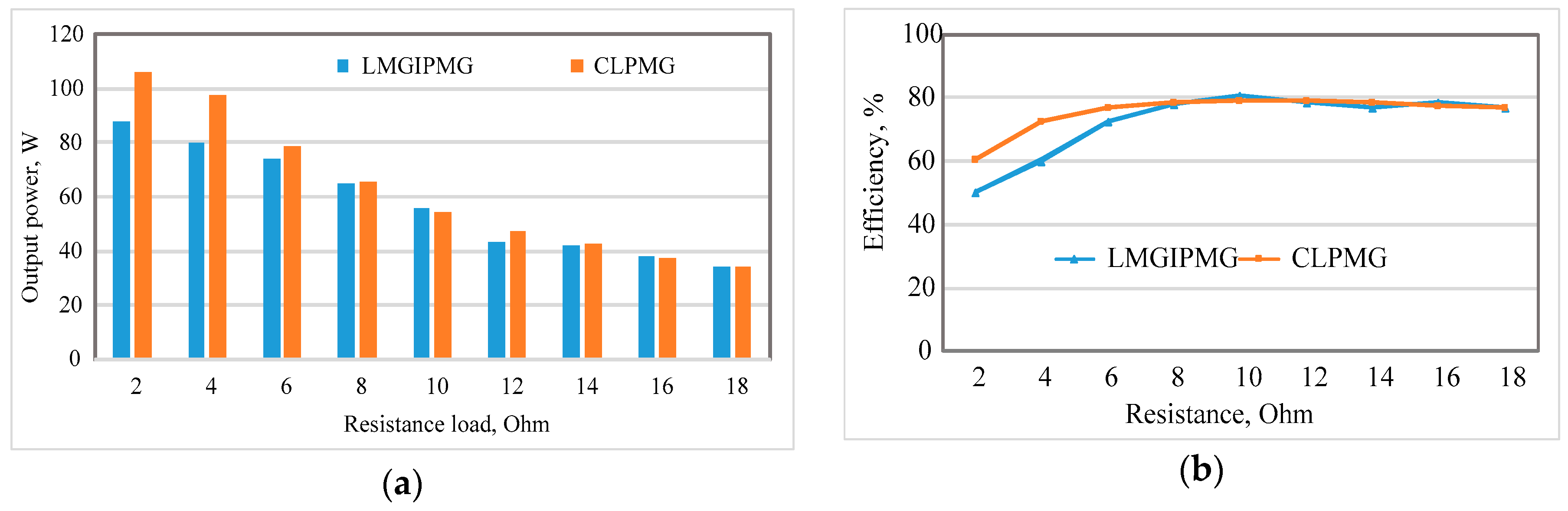
4.2. Output Power and Efficiency
4.3. Voltage Regulation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brekken, T.K.A.; von Jouanne, A.; Han, H.Y. Ocean wave energy overview and research at Oregon State University. In Proceedings of Power Electronics and Machines in Wind Applications, Lincoln, NE, USA, 24–26 June 2009; IEEE: New York, NY, USA.
- Scruggs, J.; Jacob, P. Harvesting Ocean Wave Energy. Science 2009, 323, 1176–1178. [Google Scholar] [CrossRef] [PubMed]
- Muetze, A.; Vining, J.G. Ocean wave energy conversion—A survey. Proc. IEEE Ind. Appl. Conf. 2006, 3, 1410–1417. [Google Scholar]
- Mueller, M.A. Electrical generators for direct drive wave energy converters. IEE P-GENER TRANSM D 2002, 149, 446–456. [Google Scholar] [CrossRef]
- Chen, Z.X.; Yu, H.T.; Hu, M.Q. The research on direct-drive wave energy conversion system and performance optimization. Acta Oceanol. Sin. 2014, 33, 178–183. [Google Scholar] [CrossRef]
- Liu, C.Y.; Yu, H.T.; Hu, M.Q.; Liu, Q.; Zhou, S.G.; Huang, L. Research on a permanent magnet tubular linear generator for direct drive wave energy conversion. IET Renew. Power Gener. 2014, 8, 281–288. [Google Scholar] [CrossRef]
- Tsurumoto, K.; Kikushi, S. A new magnetic gear using permanent magnet. IEEE Trans. Magn. 1987, 23, 3622–3624. [Google Scholar] [CrossRef]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Holehouse, R.C.; Atallah, K.; Wang, J. Design and Realization of a linear magnetic gear. IEEE Trans. Magn. 2011, 47, 4171–4174. [Google Scholar] [CrossRef]
- Jian, L.; Chau, K.T.; Jiang, J.Z. A magnetic-geared outer-rotor permanent-magnet brushless machine for wind power generation. IEEE Trans. Ind. Appl. 2009, 45, 954–962. [Google Scholar] [CrossRef]
- Atallah, K.; Rens, J.; Mezani, S.; Howe, D. A novel ‘pseudo’ direct-drive brushless permanent magnet machine. IEEE Trans. Magn. 2008, 44, 4349–4352. [Google Scholar] [CrossRef]
- Li, W.; Chau, K.T.; Jiang, J.Z. Application of linear magnetic gears for pseudo-direct-drive oceanic wave energy harvesting. IEEE Trans. Magn. 2011, 47, 2624–2627. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Chau, K.T.; Zhang, Z. Novel Design of Double-Stator Single-Rotor Magnetic-Geared Machines. IEEE Trans. Magn. 2012, 48, 4180–4183. [Google Scholar] [CrossRef] [Green Version]
- Niu, S.; Ho, S.L.; Fu, W.N. Performance analysis of a novel magnetic-geared tubular linear permanent magnet machine. IEEE Trans. Magn. 2011, 47, 3598–3601. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LMGIPMG | CLPMG | ||||
|---|---|---|---|---|---|
| R0 | Inner radius of stator (mm) | 10 | R0 | Inner radius of stator (mm) | 10 |
| R1 | Outer radius of stator (mm) | 28 | R1 | Outer radius of stator (mm) | 45.5 |
| R2 | Inner radius of low-speed translator (mm) | 29 | R2 | Inner radius of translator (mm) | 48.5 |
| R3 | Outer radius of low-speed translator (mm) | 32 | R3 | Outer radius of l translator (mm) | 54.5 |
| R4 | Inner radius of high-speed translator (mm) | 33 | ωs | Width of slot (mm) | 10.5 |
| R5 | Outer radius of high-speed translator (mm) | 40.5 | ωt | Width of tooth (mm) | 9 |
| ωs | Width of slot (mm) | 6 | Ys | Yoke thickness of stator (mm) | 13.5 |
| ωt | Width of tooth (mm) | 3.75 | HPM | Thickness of PMs (mm) | 3 |
| Ys | Yoke thickness of stator (mm) | 4.5 | τp | Pole pitch (mm) | 21.5 |
| HPM | Thickness of PMs (mm) | 2.5 | τs | Coil pitch (mm) | 19.5 |
| LPM | PMs length of high-speed translator (mm) | 10.75 | Hb | Thickness of back iron (mm) | 3 |
| N | Stator winding turns per coil | 50 | N | Stator winding turns per coil | 60 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, N.; Yu, H.; Hu, M.; Liu, C.; Huang, L.; Shi, Z. A Study on a Linear Magnetic-Geared Interior Permanent Magnet Generator for Direct-Drive Wave Energy Conversion. Energies 2016, 9, 487. https://doi.org/10.3390/en9070487
Feng N, Yu H, Hu M, Liu C, Huang L, Shi Z. A Study on a Linear Magnetic-Geared Interior Permanent Magnet Generator for Direct-Drive Wave Energy Conversion. Energies. 2016; 9(7):487. https://doi.org/10.3390/en9070487
Chicago/Turabian StyleFeng, Ningjun, Haitao Yu, Minqiang Hu, Chunyuan Liu, Lei Huang, and Zhenchuan Shi. 2016. "A Study on a Linear Magnetic-Geared Interior Permanent Magnet Generator for Direct-Drive Wave Energy Conversion" Energies 9, no. 7: 487. https://doi.org/10.3390/en9070487