1. Introduction
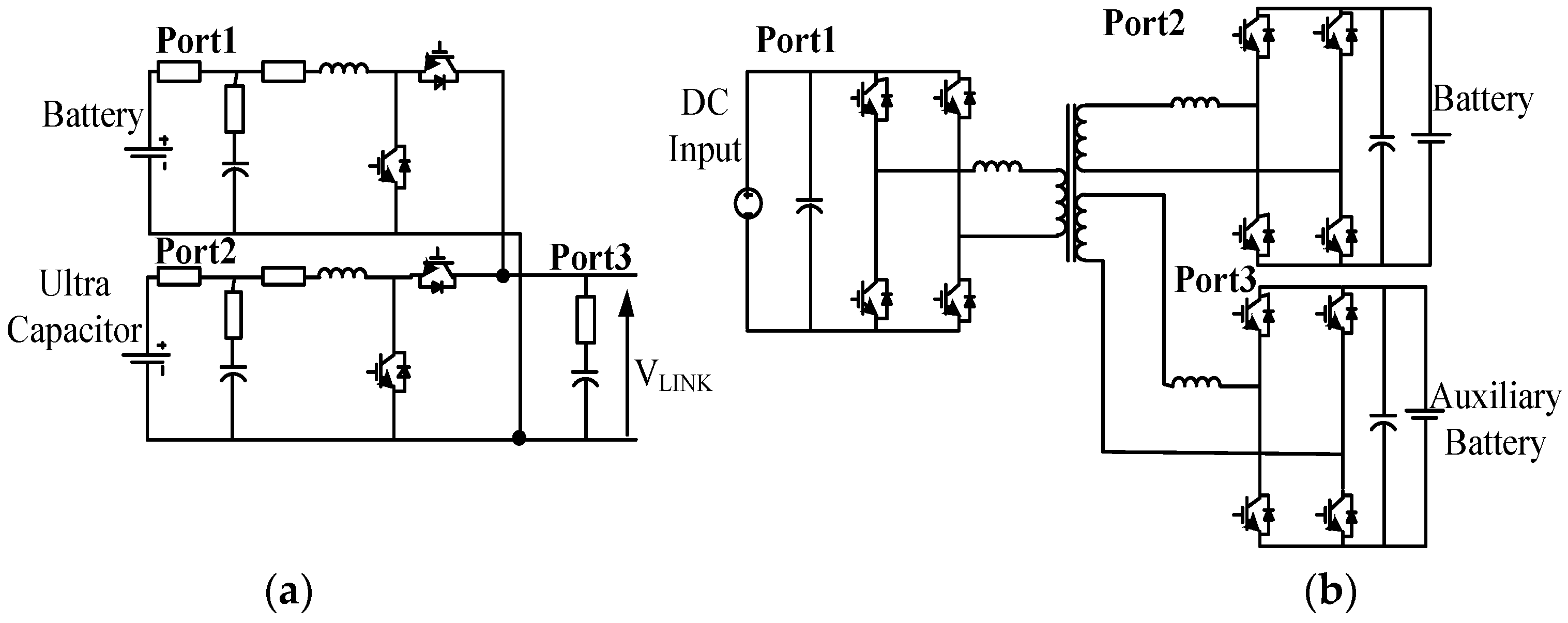
As concerns grow over environmental pollution, fossil fuel consumption and the energy crisis, electric vehicles (EVs) have been attracting wide interest. A diverse range of energy storage elements is available for use in EVs, and three-port active bridge (TAB) converters offer an optimal option to control the power flows of the different elements. TABs can be classified as DC link interfacing (DI) and magnetic coupler interfacing (MI) devices. A DI TAB is shown in
Figure 1a when connecting a battery unit, an ultracapacitor and a DC link [
1,
2]. The device has a simple topology and no electrical isolation, but it cannot cope with a wide operating voltage ratio; energy storage devices connected to different ports must have a similar operating voltage, so the DI cannot be applied directly. A typical MI TAB is shown in
Figure 1b when connecting a battery unit and an auxiliary battery, and it can convert DC voltages into high frequency AC voltages and achieve galvanic isolation [
3]. Using a high-frequency transformer, different types of energy storage device can be connected to the MI, and different voltages and currents can be matched [
4].
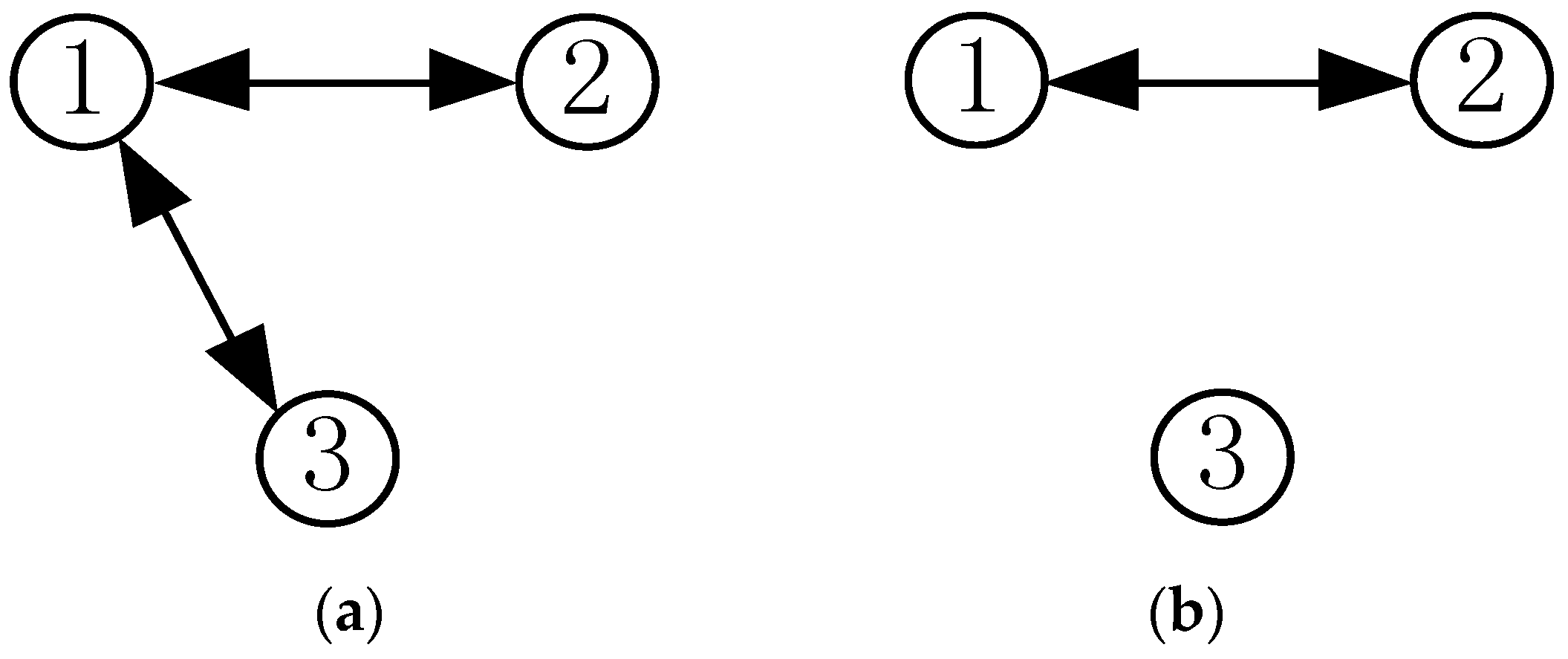
There are two types of power transmission in TABs.
Figure 2a shows power transfer from one port to the other two ports or from two ports to the third port simultaneously;
Figure 2b shows power transfer between two ports while the third port is isolated, i.e., the isolated port is in isolation control. This paper focuses on idling port isolation control of the MI TAB.
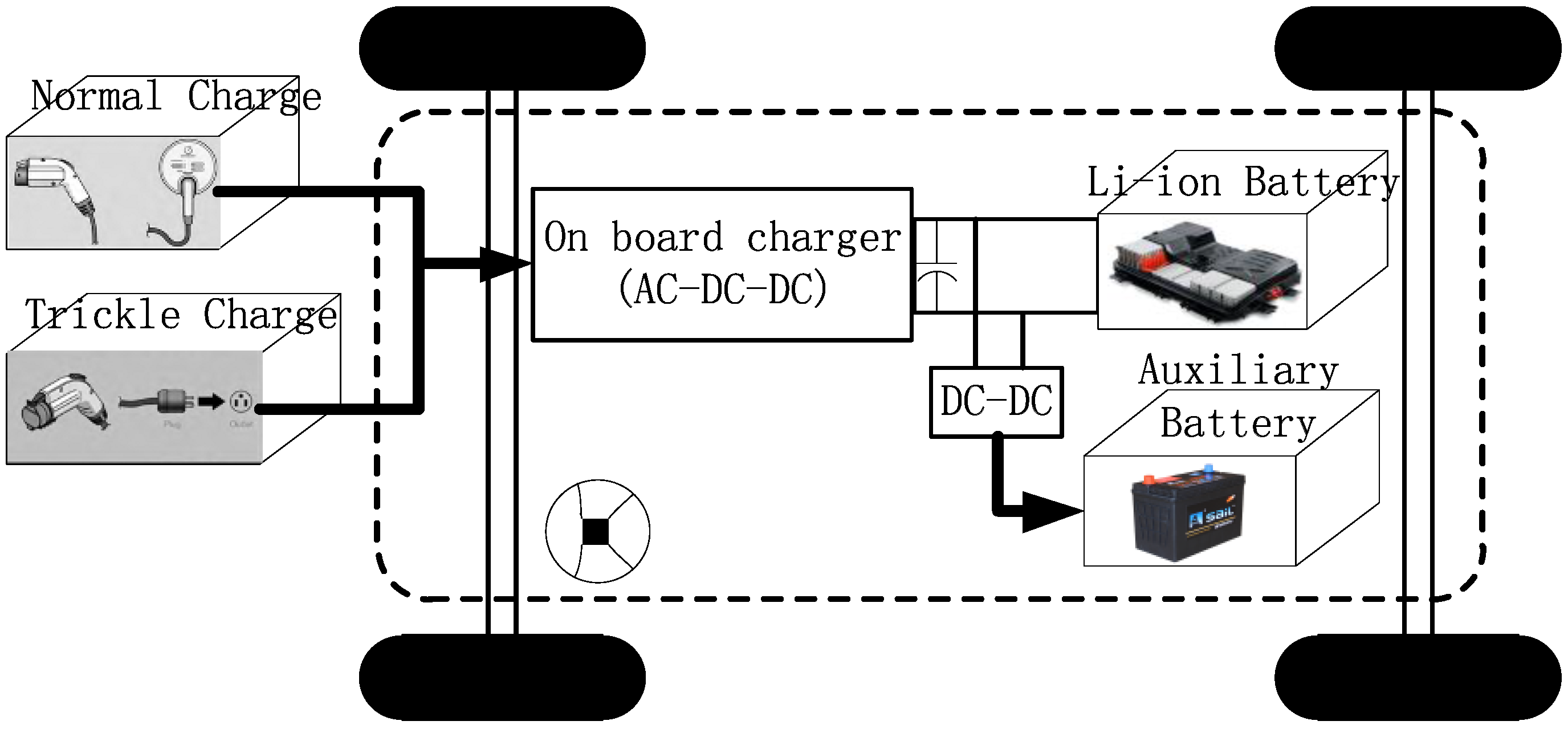
Two DC-DC converters are used in the EV charging system, as shown in
Figure 3. One of these converters is used in the on-board charger to charge the battery, which can then provide power to the entire EV system. The other converter is between the Li-ion battery and the auxiliary battery and is used to charge the auxiliary battery, which can then provide power to electrical installations such as wipers, air-conditioning, and lighting [
5,
6,
7,
8,
9]. The two converters in EVs work independently. The TAB is considered to be a combined charger composed of an on-board charger and a DC-DC converter for EVs, and was first proposed in [
9]. Power transfer isolation means the isolated port has zero average power [
9]. Because of idling port comes with power transfer isolation, it should points out that isolation refers to power transfer isolation in this article. The work focused on idling port isolation between the DC-DC converter and the on-board charger, i.e., where the DC-DC converter is isolated during the charging state and the on-board charger is isolated during the DC-DC operation state. The TAB structure, a mathematical model of the TAB, its zero-voltage-switching (ZVS) range and its root mean square (RMS) current performance were widely analyzed [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20]. However, these analyses did not take the idling port isolation control characteristics into consideration. A specific control strategy should be used to achieve isolation control. Single phase shift (SPS) control, where each active bridge operates in a fixed duty cycle at 0.5, is used to achieve idling port isolation. The SPS control strategy will generate high peak currents and RMS currents in the idling port, which results in high switching and conduction losses. However, it is not desirable for the active components in EVs to have high peak currents and RMS currents because they will increase the current stress and conduction losses. This poses challenges for the design of a combined charger. Dual phase shift (DPS) control, where each port operates with a flexible duty cycle, was proposed to improve on the characteristics of SPS control [
21,
22]. Each port operates in DPS on the basis that SPS has been used in the three-port DC-DC converter to achieve isolation control. Minimum overall system losses and a lower RMS current can then be achieved. However, adoption of DPS control for every port may result in large numbers of process variables and a complex control strategy.
In this paper, an improved dual-phase-shift (IDPS) control strategy, in which only one port operates on a DPS basis while the other two ports operate with a fixed 0.5 duty ratio, was first applied to isolation control. There are six phase shift angles of DPS control in TAB [
23,
24] and four phase shift angles of IDPS control in TAB [
11,
13]. DPS control has two more switching actions than IDPS control. So IDPS control is easy and convenient to implement. In IDPS control, two bridges of TAB operate under a fixed 0.5 duty cycle, while the last bridge operates under a flexible duty cycle which is determined by the phase shift angles.
By taking the isolation control characteristics into consideration, this paper builds fundamental mathematical models of SPS control and IDPS control, including the current expression for the leakage inductance, the power transmission between each pair of ports, and the RMS current of the idling port. Based on this model, a detailed analysis and comparison of these two strategies is performed when under isolation control. The analyses include a ZVS area comparison and an RMS current comparison between SPS control and IDPS control. Additionally, the relationship between the RMS current and the transmission power has been revealed for the first time. Finally, based on the aforementioned analyses, the optimal turns ratio and phase shift angle of a three-port full bridge converter were deduced under isolation control to reduce the RMS current and the peak current in the idling port. Based on the above analysis, IDPS control is first applied in isolation control. It is possible to expand the ZVS area and decrease the RMS current than SPS control. Simulated and experimental results for SPS control and DPS control were also provided to verify the effectiveness of DPS control in reducing both the RMS current and the peak current on the idling port.
2. Three-Port Active Bridge (TAB) Working as a Combined Charger
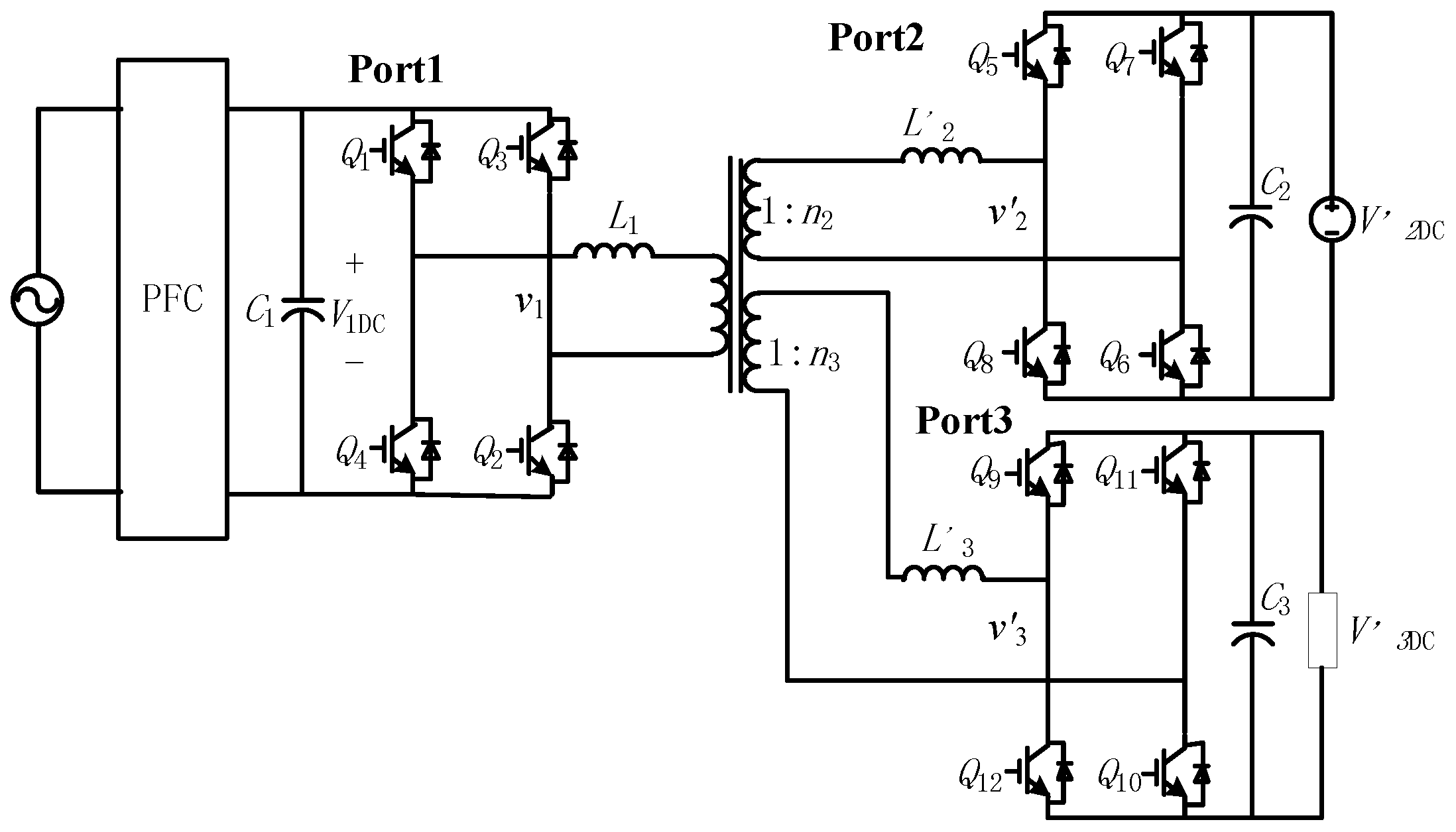
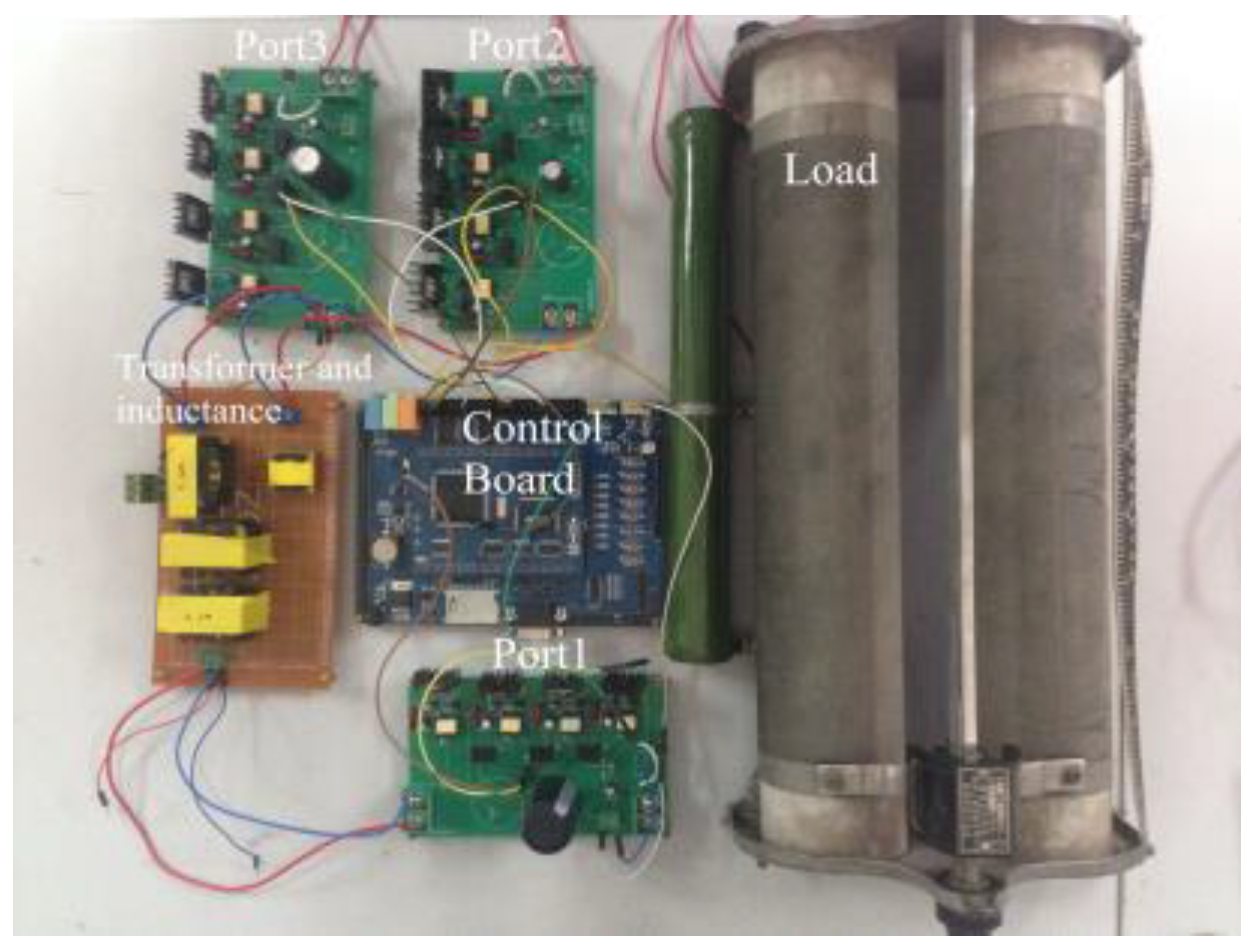
The TAB topology when used as a combined charger is shown in
Figure 4. Port1 is connected to
V1DC, which is rectified by the power grid through power factor correction (PFC) or using a diode rectifier. Port2 is connected to the auxiliary battery. Port3 is connected to the power battery. During certain operating states, one of the three ports in the TAB must stop. For example, during the charging state, the auxiliary battery does not need to work, and the power is transmitted from Port1 to Port3 while Port2 is idling. Similarly, during the DC-DC state, the battery charger is isolated, and thus power is transmitted from Port3 to Port2 while Port1 is idling. The peak current is obvious in the charging mode, and thus it is representative for analyzing the optimal isolation control in this mode; the DC-DC mode offers a similar analysis.
V1DC,
V’2DC, and
V’3DC represent the voltages of Port1, Port2, and Port3, respectively.
L1,
L’2, and
L’3 are the leakage inductances of the high-frequency transformer, where the turns ratio between the ports is 1:
n1:
n2.
v1,
v’
2, and
v’
3 represent the AC currents of each port. The TAB offers the advantages of size reduction and cost savings, and can provide galvanic isolation between the ports.
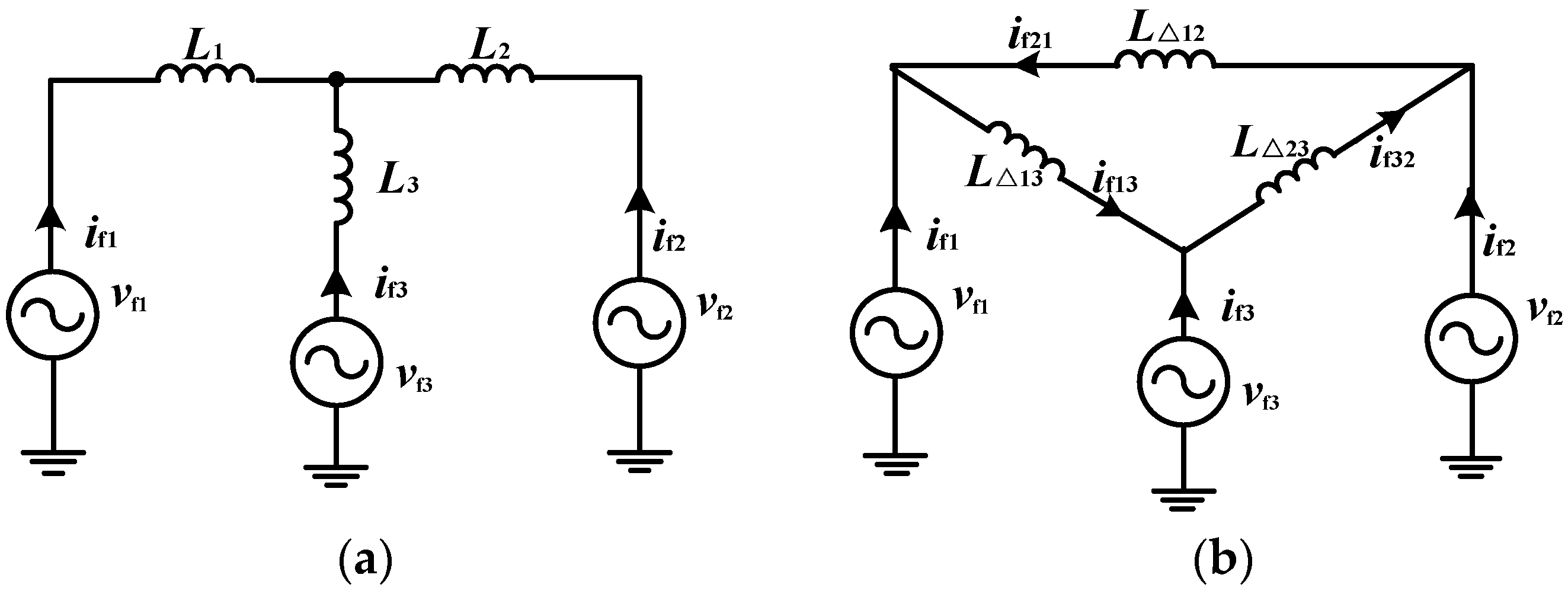
The simplified fundamental primary reference equivalent circuit is shown in
Figure 5; the Y-type is convenient for modelling, and the Δ-type is convenient for system analysis [
24], where
L2 =
L’2/
n22,
L3 =
L’3/
n32,
L△12 =
L1+
L2+
L1L2/
L3,
L△23 =
L2+
L3+
L2L3/
L1, and
L△13 =
L1+
L3+
L1L3/
L2.
vf1–
vf3 are the primary reference fundamental voltages of
V1DC,
V’2DC/
n2, and
V’3DC/
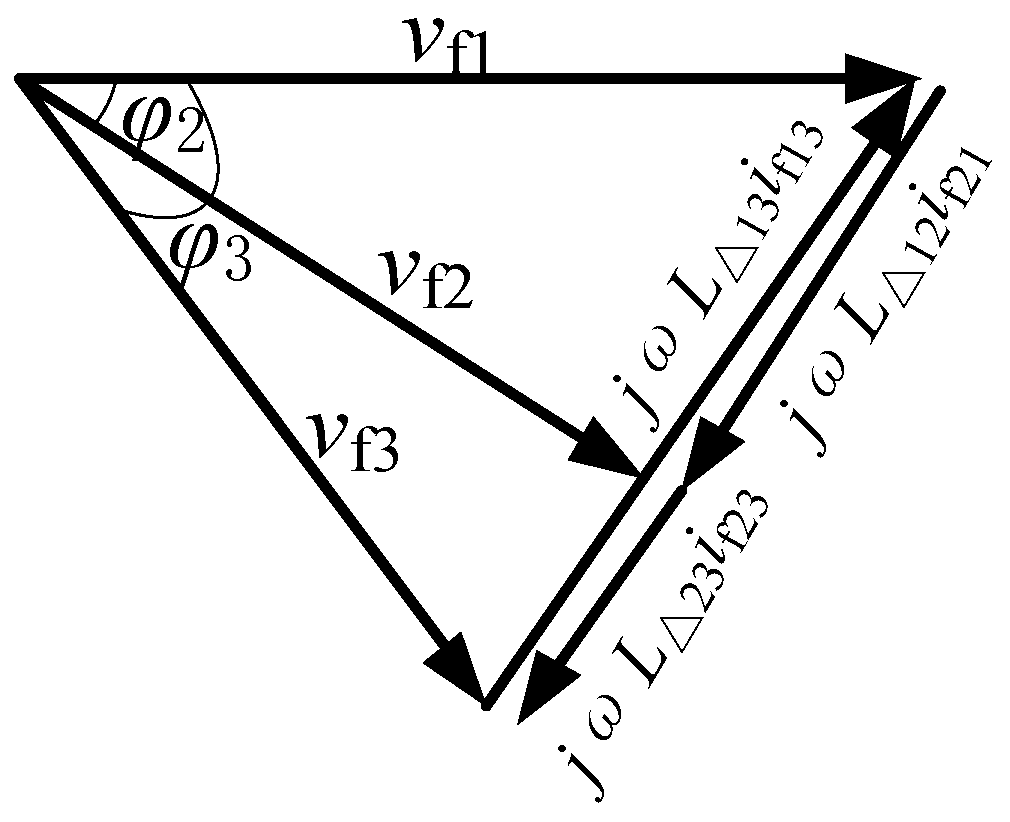
n3, respectively. The current vector is given in Equation (1), based on
Figure 5b. The fundamental parameters are given by the angles, where
. For ease of analysis and design, we can set
φ1 = 0. The vector diagram of isolation control is shown in
Figure 6, and is based on Equation (1).
SPS control has been used to achieve isolation control. When
φ1 is equal to zero,
φ2 and
φ3 denote the phase shift angles between
vf2 and
vf1 and between
vf3 and
vf1, respectively. The fundamental power is assumed to be equal to the active power. From studies of the Fourier transforms of the high-frequency voltage waveforms,
is deduced [
9]. The power transmission characteristics of each port are shown in Equation (2). Isolation control in Port2 can only be achieved when
P21 =
P32.
3. Mathematical Model for Isolation Control
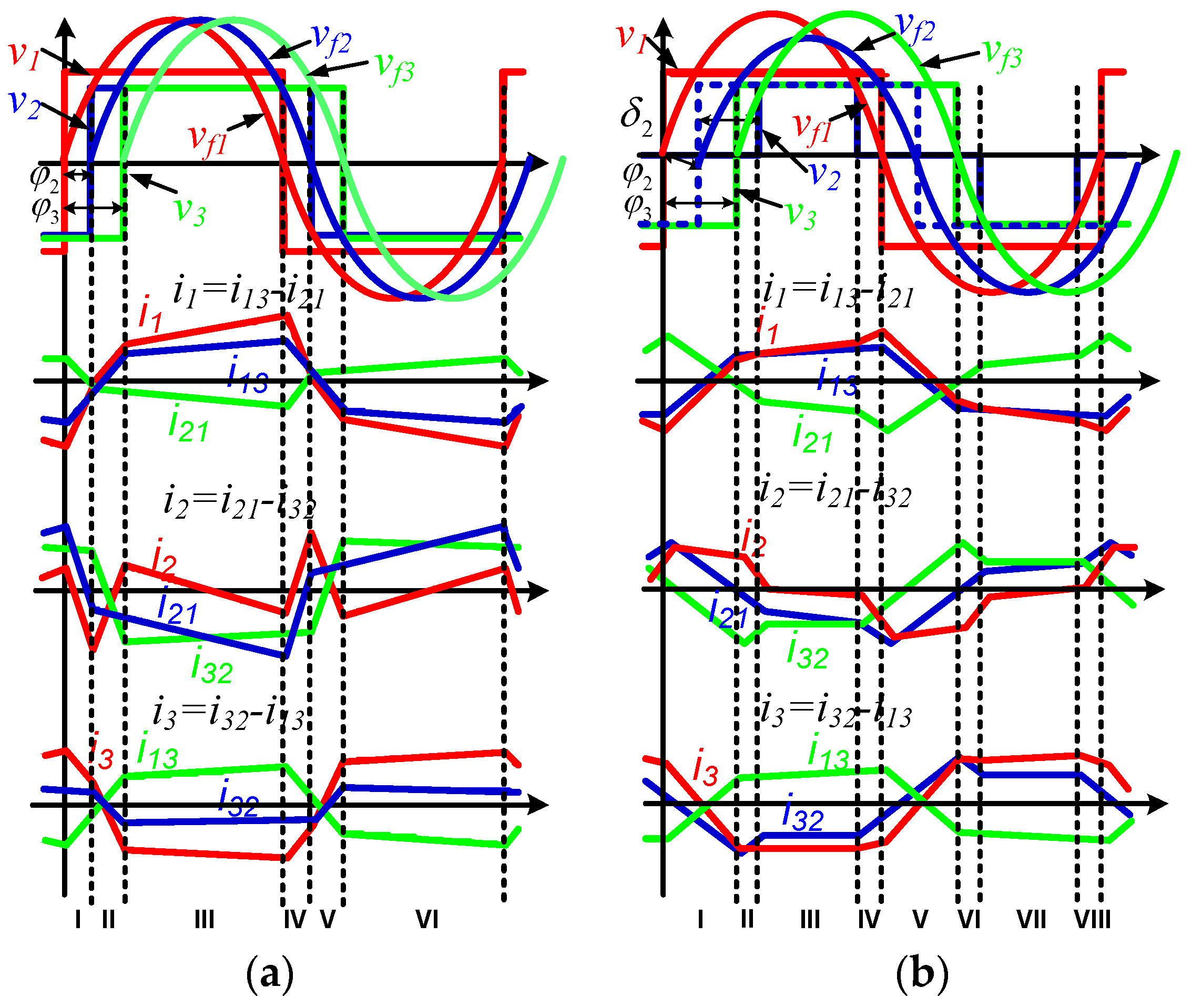
In the charging mode, Port2 is idling. The SPS control and IDPS control waveforms are shown in
Figure 7. It should be noted here that we only use DPS on Port2 because it has the lowest voltage that will cause serious peak currents.
The fundamental power is assumed to be equal to the active power. The Fourier transform is therefore used for analysis of the SPS control waveforms of
Figure 7a. To provide a comparison between SPS and IDPS, we set the appropriate variables such that
φ2 denotes the phase shift angle between
vf1 and
vf2,
φ3 denotes the phase shift angle between
v1 and
v3, and
δ2 denotes the phase shift angle between
vf2 and
v2.
δ2 and
φ2 must meet the constraints of DPS control, as given by
φ2<
δ2 [
18].
Based on
Figure 7b, the IDPS operation over a single switching cycle can be classified into eight stages, numbered I through VIII. Because of the symmetry and voltage-second balance characteristics, a half cycle (I–IV) is analyzed here rather than a full cycle. The leakage currents
iL21,
iL32, and
iL13 through
L△12,
L△32, and
L△13 can be deduced as follows, where ω = 2π
f and the start time is zero.
Mode I ends at
φ =
φ3. In mode II,
Mode II ends at
φ =
φ2+
δ2. In mode III,
Mode III ends at
φ = π+
φ2−
δ2. In mode IV,
Under isolation control, IDPS control and SPS control have the same vector diagrams, as shown in
Figure 6. From study of the Fourier transforms of the high-frequency voltage waveforms,
can be deduced. The IDPS power transmission at each port is shown in Equation (7) under the hypothesis that the start time of the switching cycle is zero.
Equations (3)–(6) are controlled by five variables, i.e., n2, n3, δ2, φ2, and φ3, which gain one more variable than Equation (2), i.e., n2, n3, φ2 and φ3. We assume that L△12 = L△23 = L△13 = L in the following analysis. A detailed analysis and comparison between SPS control and IDPS control in terms of the ZVS range and the RMS current are given below to optimize the isolation control process.
4. Zero-Voltage-Switching (ZVS) Region and Root Mean Square (RMS) Current Analysis
IDPS control has already been used in TABs to enlarge the ZVS region, reduce the RMS current and improve the characteristics under abnormal operating conditions. However, isolation control under IDPS control conditions and the required optimal parameters have not yet been analyzed. This section takes the isolation control characteristics into consideration to perform a comparison between SPS and IDPS control. Using this analysis, we can obtain the optimal parameters for the TAB and IDPS control.
4.1. Zero-Voltage-Switching (ZVS) Analysis and Comparison
Switching losses and conduction losses are the two main loss factors in converter efficiency. To reduce the switching losses and achieve ZVS, IDPS control can be used on Port2 on the basis of SPS control. Based on the ZVS analysis, we can determine the required turns ratio.
M21 and
M31 are defined as:
The idealized steady-state waveforms are shown in
Figure 7. The ZVS conditions for each active component can be summarized as follows: when
v1,
v2, and
v3 are at the rising edges, the corresponding currents
i1,
i2, and
i3 are negative or zero, and when
v1,
v2, and
v3 are at the falling edges, the corresponding currents are positive. Based on the current direction shown in
Figure 7, the currents in the three ports are defined as:
i1 =
i13−
i21,
i2 =
i21−
i32, and
i3 =
i32−
i13.
The conditions for ZVS under SPS control are shown in Equation (9). Based on Equations (8) and (9), the simplified conditions are given in Equation (10).
Analogously, the conditions for ZVS under IDPS control are given in Equation (11). Based on Equations (8) and (11), the simplified conditions are then shown in Equation (12).
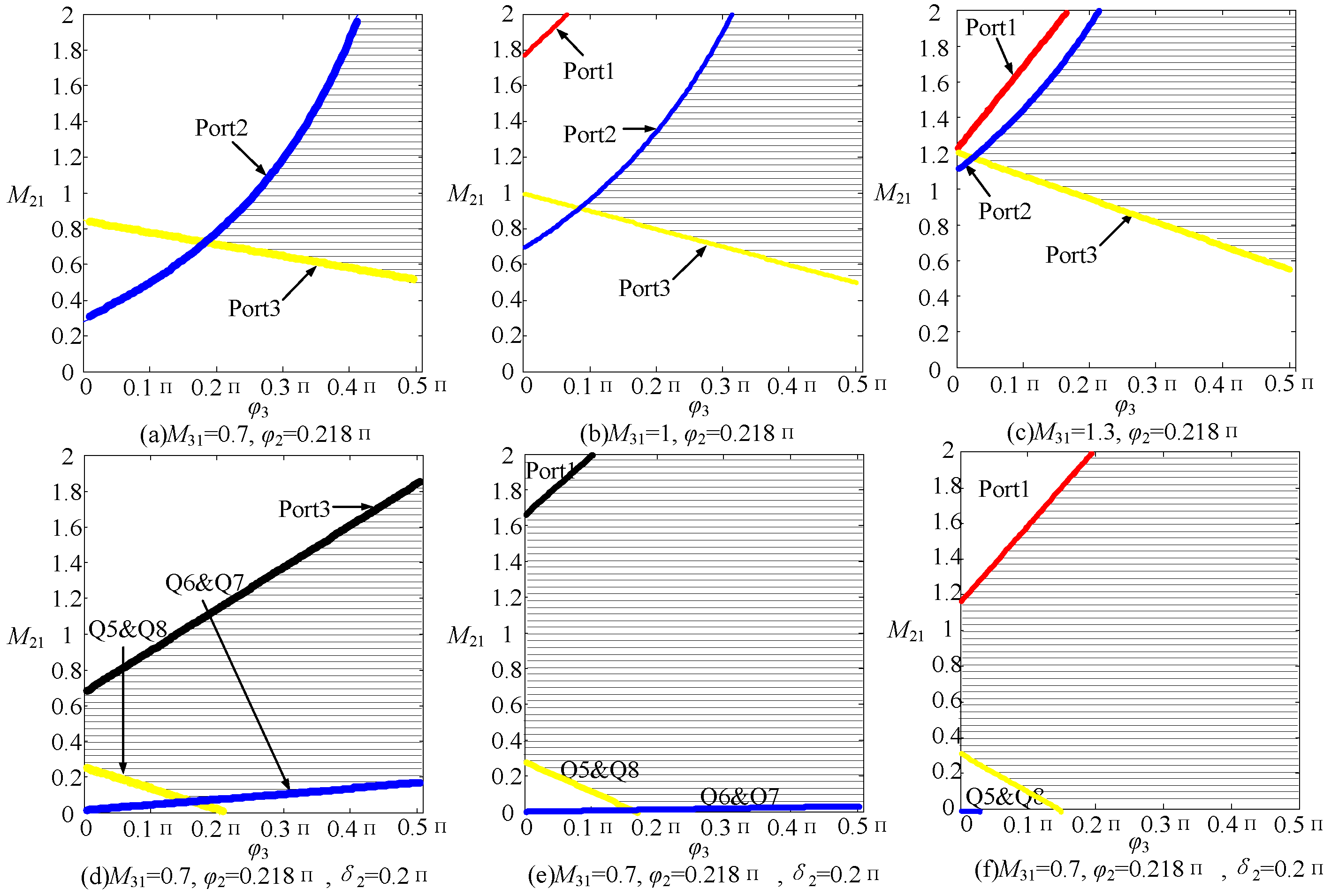
Under SPS control, the ZVS condition has a relationship with
M21,
M31,
φ2 and
φ3 that is based on Equation (10). This relationship is difficult to analyze, and thus we set
M31 and
φ2 at constant values to enable analysis of the relationship between
M21 and
φ3. The resulting relationship is shown in
Figure 8a–c, based on Equation (10). Similarly, the ZVS condition has a relationship with
M21,
M31,
φ2,
φ3 and
δ2 under IDPS control, and in this case, we set
M31,
δ2 and
φ2 at constant values. The relationship between
M21 and
φ3 is shown in
Figure 8d–f based on Equation (12). The scope of the shaded part indicates the ZVS region. The conditions for Port1–Port3 are also given.
According to
Figure 8a–c, when
φ2 is a constant, as the difference in absolute value between 1 and
M31 becomes larger, then the ZVS range of the converter becomes smaller. To increase the efficiency of this converter, we set
M31 to be equal to 1 under SPS control in this paper.
Similarly, we can obtain the same conclusion based on
Figure 8d–f. The TAB can achieve its maximum ZVS range under IDPS control when
M31 is equal to 1. When
M31 is equal to 1, then according to Equations (2) and (7) and the condition that
P21−
P32 = 0, we can obtain the same isolation conditions under both SPS control and IDPS control: 2
φ2 =
φ3. The ZVS region for SPS shown in Equation (10) and the ZVS region for IDPS shown in Equation (12) can be further simplified, as shown in
Table 1.
Based on
Table 1 and the IDPS limiting condition of
φ2 <
δ2, we can deduce the conclusion that the ZVS regions for Port1 and Port3 are expanded, while the region corresponding to Port2 is reduced. We therefore set
M31 = 1. We still must select the appropriate values of
M21,
φ3 and
δ2 to ensure not only that we meet the ZVS condition but also that we can achieve the minimum RMS current under a specific transmission power.
4.2. RMS Current Analysis and Comparison
To reduce the conduction losses, we need to minimize the RMS current. IDPS control can be adopted on Port2 on the basis of SPS control. By performing the RMS analysis, we can determine the appropriate phase shift angles and M21.
From an analysis of the ZVS region, we can determine that
M21 = 1 and simplify, such that
φ2 = 0.5
φ3. The original analysis of five variables (
M21,
M31,
φ2,
φ3,
δ2) is now reduced to an analysis of three (
M21,
φ3,
δ2). The square of the RMS current of
i2 under IDPS in isolation control is deduced based on Equations (3)–(7), as follows:
The transmission powers of Port1 and Port3 under IDPS in isolation control are deduced from Equation (7) as follows:
Analogously, the square of the RMS current of
i2 under SPS in isolation control is deduced as follows:
The transmission powers of Port1 and Port3 under SPS in isolation control are deduced from Equation (2) as follows:
P(p.u) and
Irms(p.u) are the per unit values for SPS and IDPS, and are defined as shown in Equation (17), where
Irms represents
I2rms or
I*
2rms,
P represents
P1 or
P*
1, and
.
When the transmission power is constant, a smaller
Irms means reduced conduction losses. The optimal values of
M21,
φ3, and
δ2 under isolation control conditions can be determined using MATLAB based on the Lagrange equation shown in Equation (18), where
P(p.u) represents the normalized transmission power and
λ is the Lagrange multiplier. The objective function is
, and the constraint conditions are as follows:
M21 ≥ 1;
P(p.u)(
M21,
φ3,
δ2) =
P(p.u); and
φ2 <
δ2.
The minimum objective function can then be solved using the following conditions:
A group of equations for DPS that was derived from Equations (13), (14), (17)–(19) can then be given as follows:
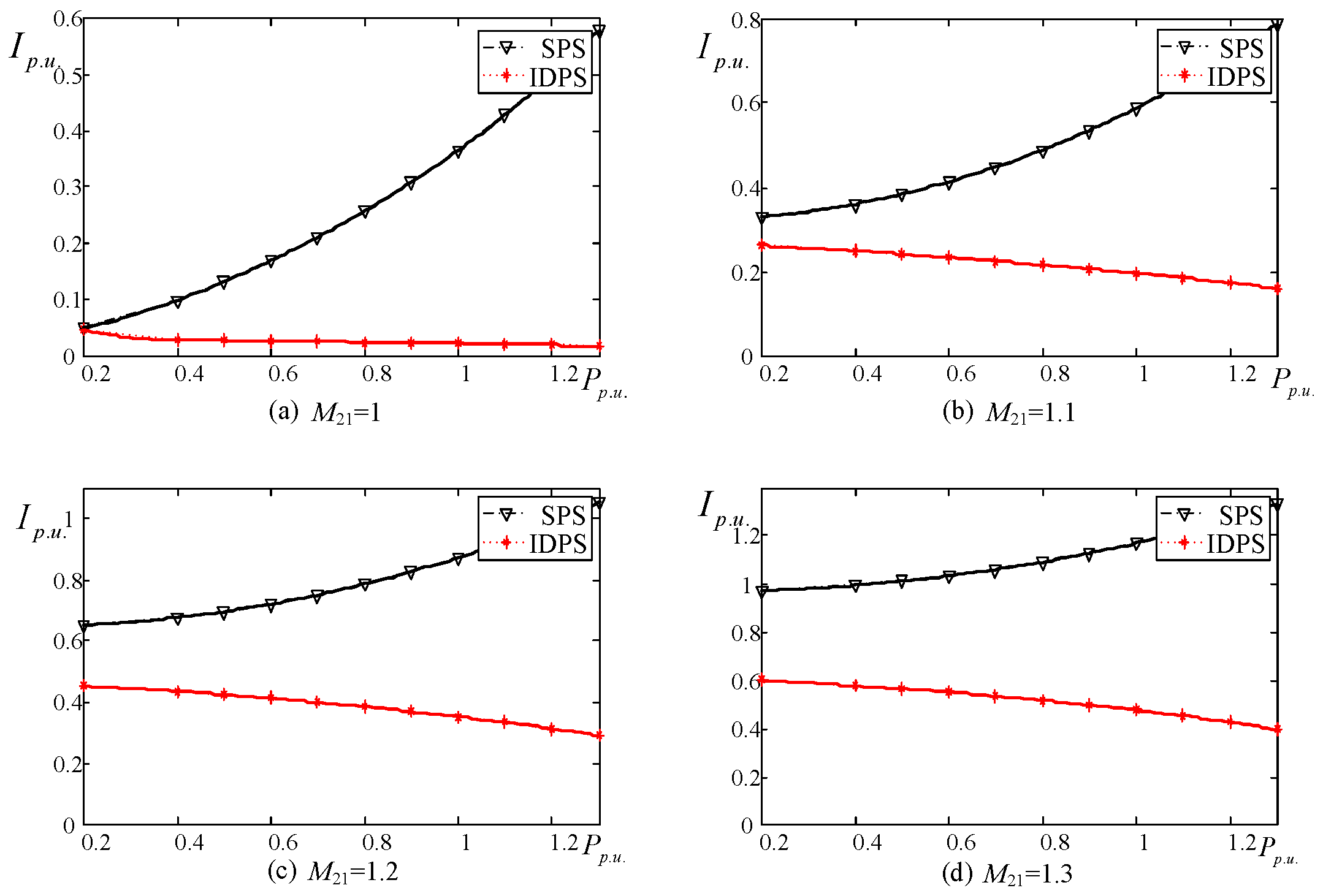
The relationship between the RMS current and the transmission power under the conditions of SPS and IDPS control is shown in
Figure 9. From
Figure 9, it can be seen that if
M21≥1, IDPS control has a smaller RMS current than that of SPS control when the TAB transfers a fixed power. This conclusion is particularly obvious under the condition where
M21 = 1. The RMS current of
i2 under IDPS control decreases as the value of
M21 becomes closer to 1. With an increase in the transmission power, the RMS current of
i2 also increases. High transmission power also means that there will be a large phase-shift angle, and this large phase-shift angle means that there will be a high RMS current; thus, there is a positive correction among the transmission power, the phase-shift angles and the RMS current.
In the charging state, the maximum power rating is 3.5 kW, which is restricted by the limitations of household electricity. In the DC-DC state, the auxiliary battery receives power from the Li-ion battery, which has a power rating of 1.6–2.2 kW. For a specific car, the transmission power has a constant value. Because the transmission power in the EV is a constant value, we thus only need to determine the optimal parameters that mean that M21 = 1 and M31 = 1, without considering abnormal operation conditions.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}