2.1. Study Area
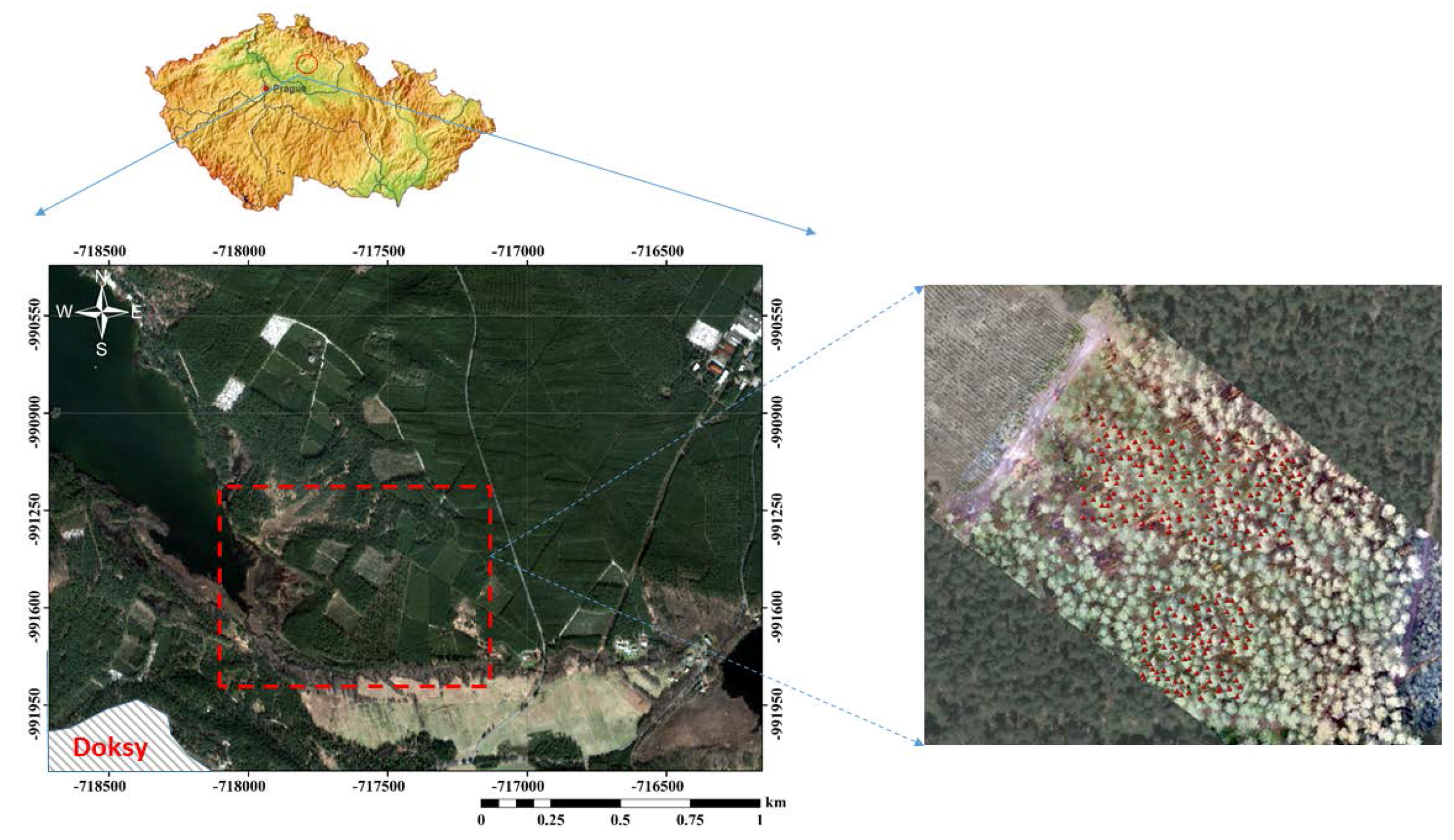
The Doksy territory lies on the shores of Lake Mácha in Northern Bohemia in the Czech Republic (
Figure 1). The lake is largely surrounded by dense forests covering an area of 300 km
2. Geologically, the area is characterized by sandstone pseudokarst in the late stages of development, and the soils are either sandy or peaty, with shallow, peaty basins over rocky sandstone hummocks and sporadic volcanic hills. We selected three evenly-aged (managed stands) 40 × 40 m experimental plots and sampled all trees in each plot to estimate the tree heights, DBH, crown diameters, and stem volume. All plots were located northeast of the city of Doksy (−718000, −991250 NW to −717000, −991950 SE in the local coordinate system S-JTSK/Krovak East North,
Figure 1). The research was carried out in a 140-year-old
Pinus sylvestris L. (Scots pine) monoculture natural stand established on sandy soils (68%). The vegetative period tends to be rather warm and dry. The mean annual air temperature is 7.3 °C and the average annual maximum temperature is 31.5 °C. The mean annual precipitation is 635 mm, with only 354 mm during the growing season.
2.2. Field Survey
For the acquisition of field measurements, we used field-map technology. Field-map is a software and hardware product which combines flexible real-time geographic information system (GIS) software field-map with electronic equipment of high accuracy for mapping and dendrometric measurement. For this study, the dendrometric device which we used was the TruPulse 360/B laser range finder by lnc. Centennial, Colorado, USA. For the purpose of this study, we used the TruPulse 360/B to measure (i) the positions of individual trees by distance based on the field triangulation approach, (ii) tree heights based on the functionality of the digital relascope, and (iii) the mean of the horizontal widths of the tree crown radius in four orientations (east, west, north, and south). The coordinate system was set to S-JTSK/Krovak East North (a local coordinate system that is mainly used in the vicinity of the Czech Republic). The whole data collection process is rather ergonomic since mapped data can be seen simultaneously in the monitor of the computer in the form of layers (either point, lines, or polygons). Each layer can have a number of attributes (i.e., tree positions, heights, etc.) which are stored in a fully relational database.
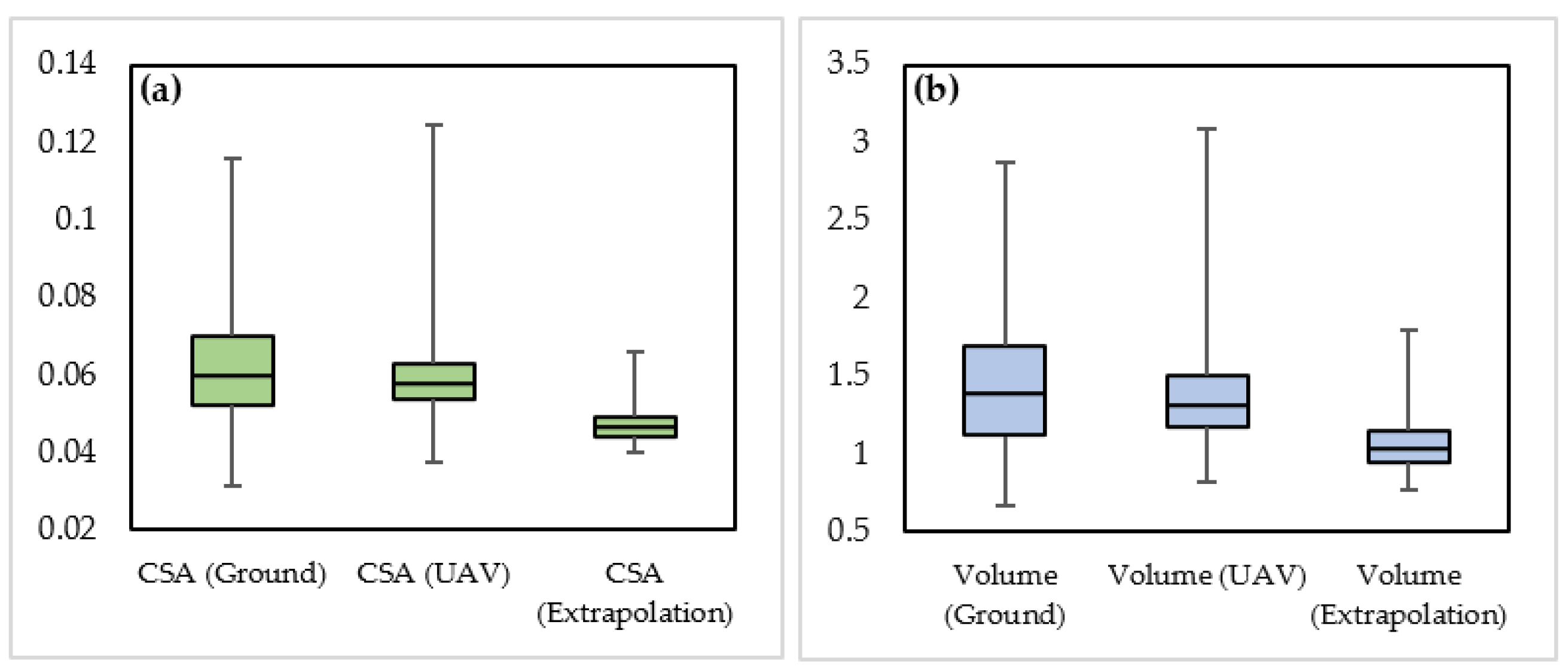
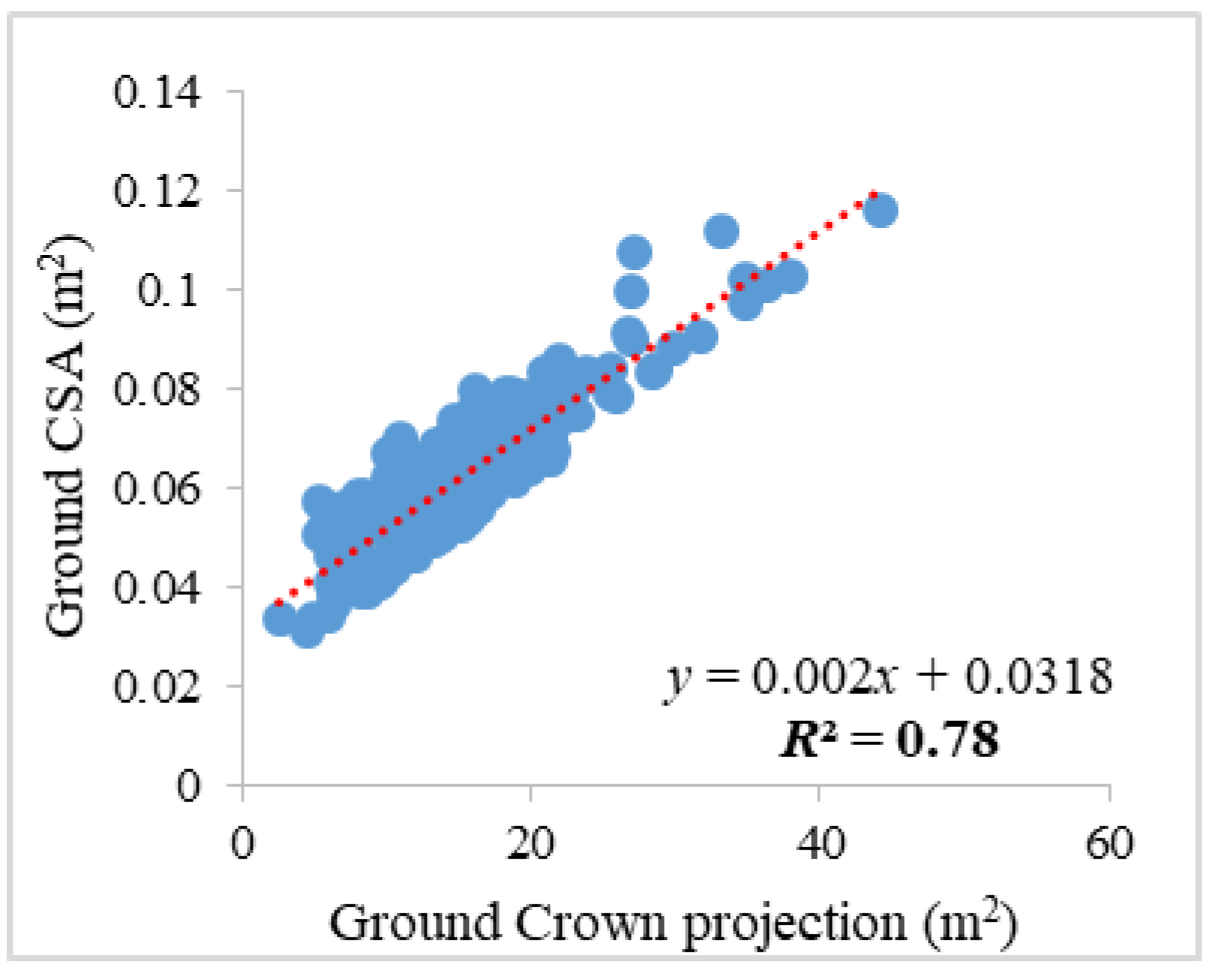
In addition, the DBH of trees (1.3 m above ground) was measured by a Häglof digital caliper (Häglof Sweden AB, Långsele, Sweden) in two perpendicular directions. Diameters were then transferred via bluetooth to the field-map computer and stored in the relative database. We considered the mean of measured diameters at breast height for computing the CSA. Finally, all the data was extracted by connecting the field-mapper with a universal serial bus (USB) to the personal computer (PC) for further processing. All field measurements were taken in November, 2015. In total, we sampled 223 live trees from all three plots.
2.3. Aerial and Satellite Imagery
The UAV data were acquired in March 2016. The platform model used was an octocopter SteadiDrone EI8HT, ready to fly (RTF) embedded with an RGB (red, green, blue) high-resolution camera. The camera was a Sony Alpha 6000 with an adjusted focal length of 25 mm. The octocopter needed approximately 7 min to complete a flight for each plot based on the predefined parameters (e.g., the number of waypoints) and the flight mode was set to semi-automatic. The flight path lines covered the entire study area and produced a set of images of the area. The octocopter was guided by a DJI (Dà-Jiāng Innovations Science and Technology Company, Shen Zhen, China) ground station, which is a global positioning system (GPS) flight planning and waypoint-based autopilot software. We performed three flights in total, one flight per plot, at a height of approximately 70 m above the ground with 80% frontal overlap and 70% side overlap.
In order to improve the accuracy of the 3D model, we also set up four ground control points (GCPs) randomly distributed within each plot; these points were measured using the Leica real-time kinematic (RTK) system, model RX1250XC with centimeter accuracy. Due to the low image quality, four of the 596 original images were excluded from the alignment process. During the alignment process, we set the accuracy to high for optimization of the final 3D model. We used Agisoft Photoscan© software (V 1.2.6, St. Petersburg, Russia) to construct the digital terrain model (DTM) and DSM from the 3D model with a cell size of 0.01 × 0.01 m. The reconstructed mesh of the 3D model was based on automatic classification on certain point classes through the triangulated irregular network (TIN) method. Due to the relatively open canopy in large parts of the study area, small bushes were often abundant in the understory, and, therefore, we classified them as ground points. For setting the parameters for the automatic classification, due to the presence of small bushes near the trees, we decreased the maximum angle from 15 (default value) to 11, the maximum distance from 4 to 1.5 m, while the cell size remained the same. All of the processing was conducted by one computer operator using an Intel® Core™ i7-6700K with a base clock of 4 GHz and 32 GB random access memory (RAM) running with the Windows 10 Professional Edition 64-bit operating system.
We used the Pléiades 1A satellite (launched 16 December 2012) to acquire the space-borne image. The image was taken 27 March 2016, and it had 20 bits/pixel dynamic range of acquisition. For this study, we used one frame with a total area of 25 km
2 (5 × 5 km). The image consisted of four multispectral bands: RGB, infrared (IR), and one panchromatic (PAN), as can be seen in
Table 1. We used six GCPs for georeferencing the satellite image. For point acquisition, we used GPS RTK Leica model RX1250XC with a maximum error of two centimeters. The RTK correction was carried out by using a base/rover set, which sends and receives fast-rate over-the-air RTK data corrections, using the PDLGFU15 radio module.
Also, dark object correction was used to derive atmospheric optical information for radiometric normalization using the minimum digital number (DN) value of satellite images = water.
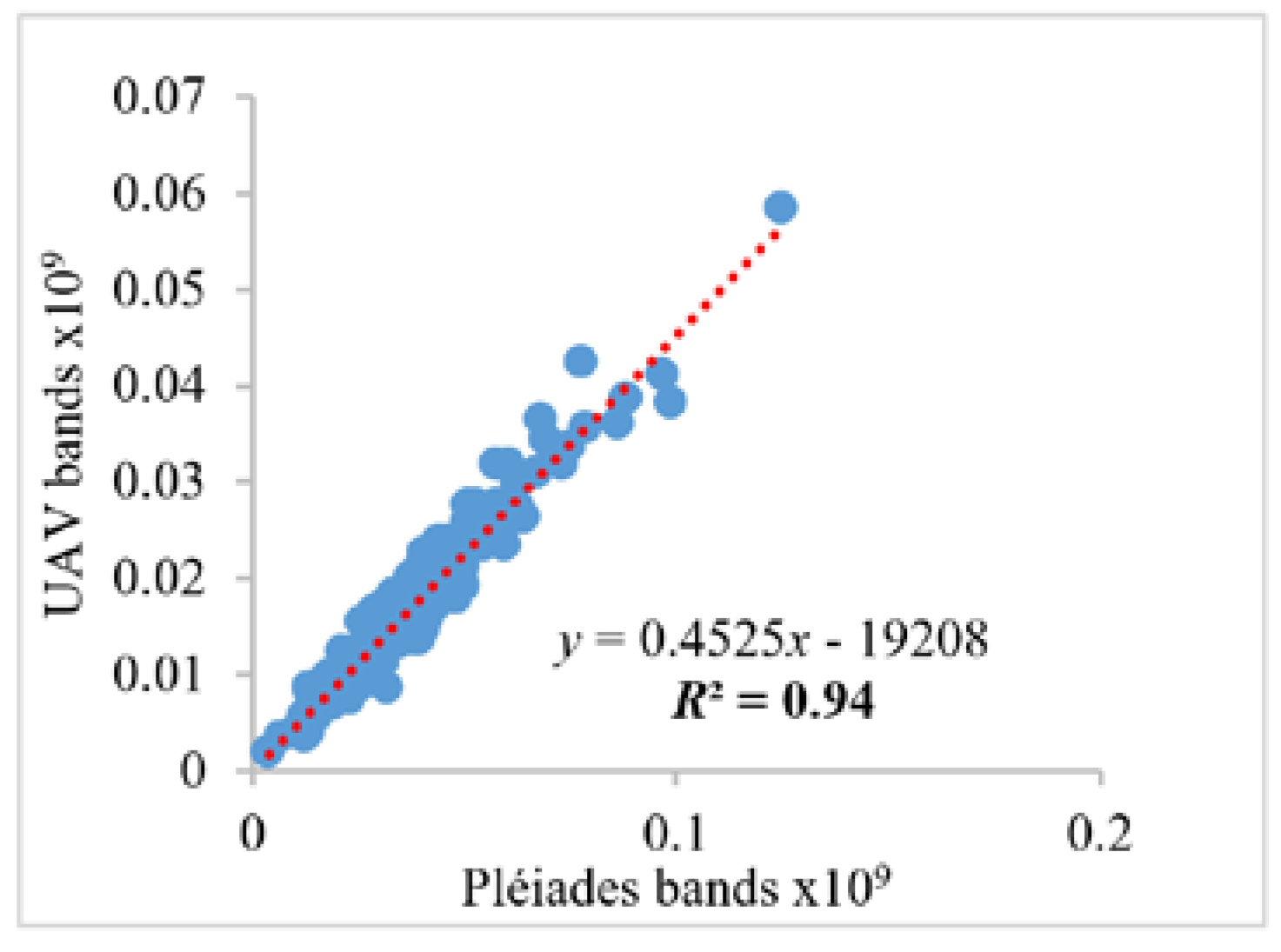
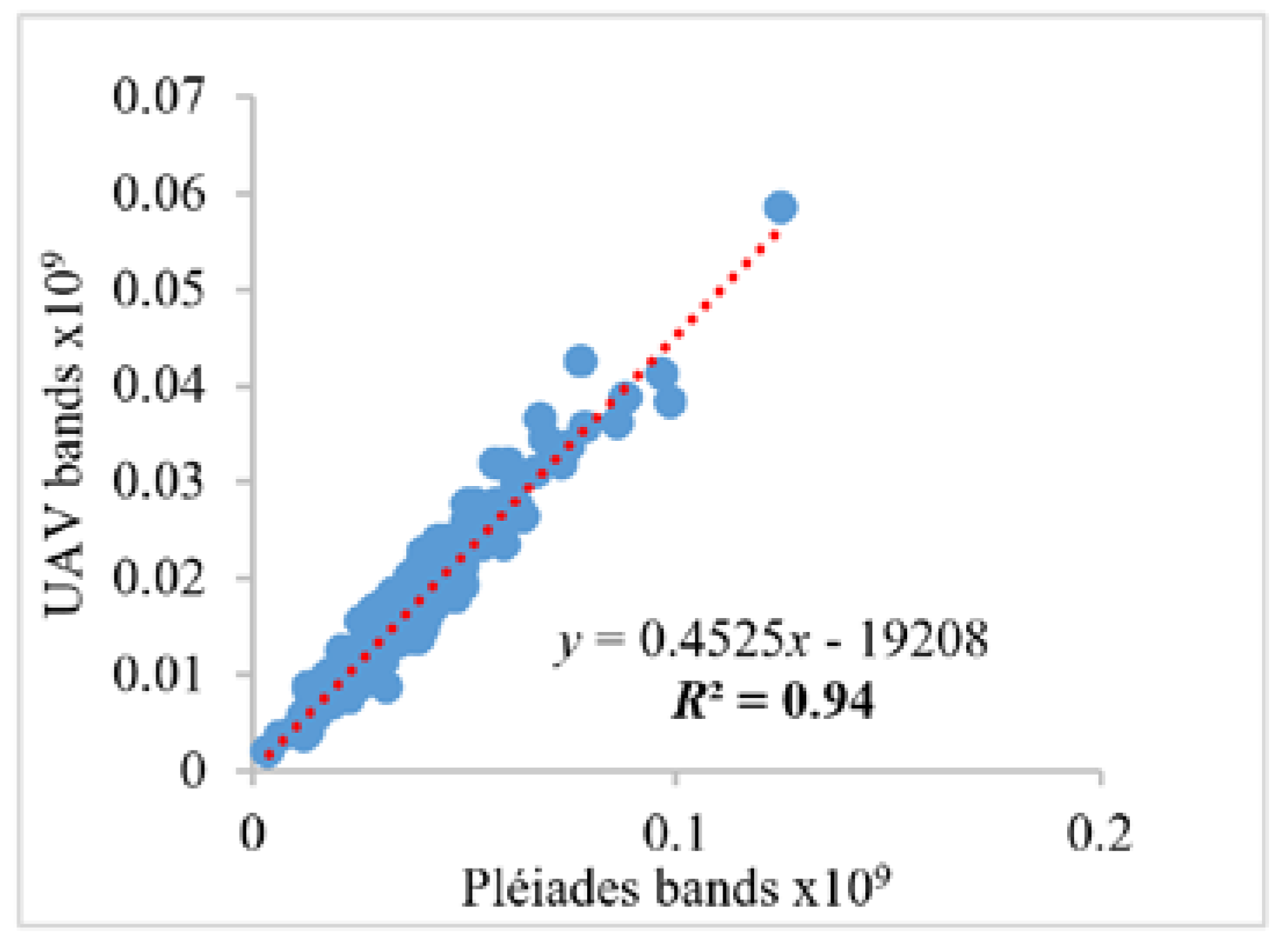
Normalized values of each band (RGB) from the UAV and satellite were then used to compare the spectral data (DN) between the UAV and Pléiades bands (separately) at the individual tree level using Equation (1):
where
Zi describes the normalized data between 0 and 1,
describes the spectral data (for both the UAV and satellite), and
xmax and
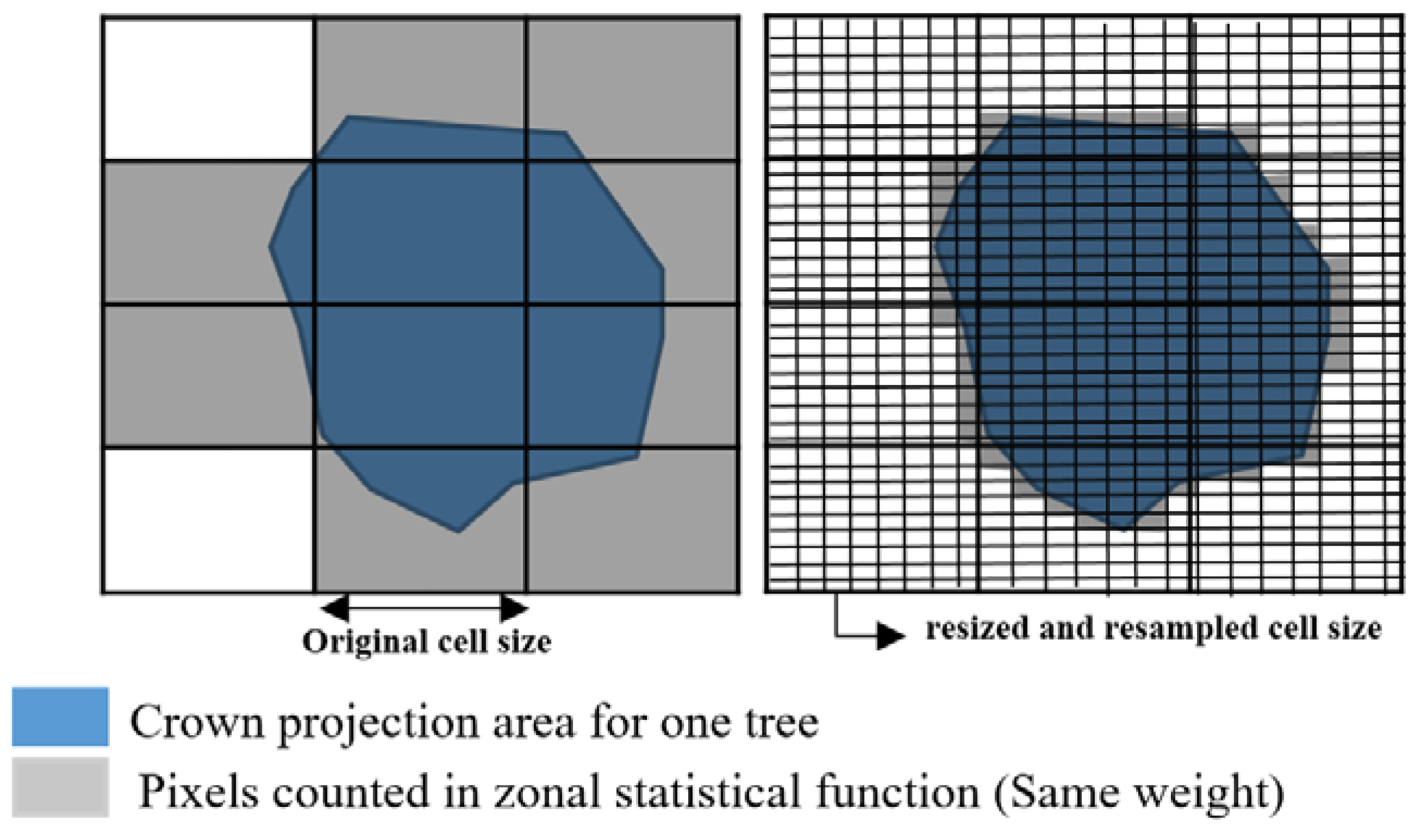
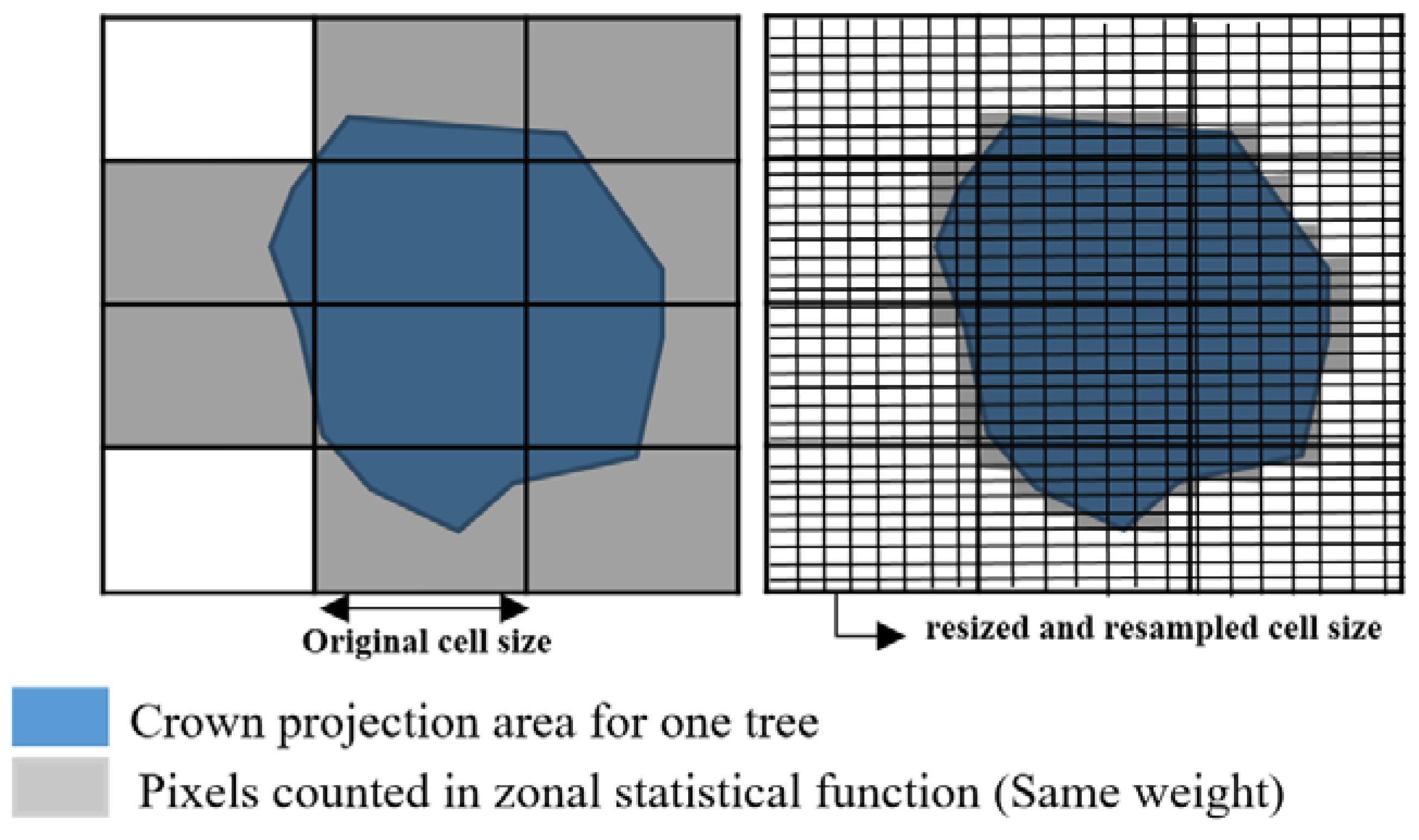
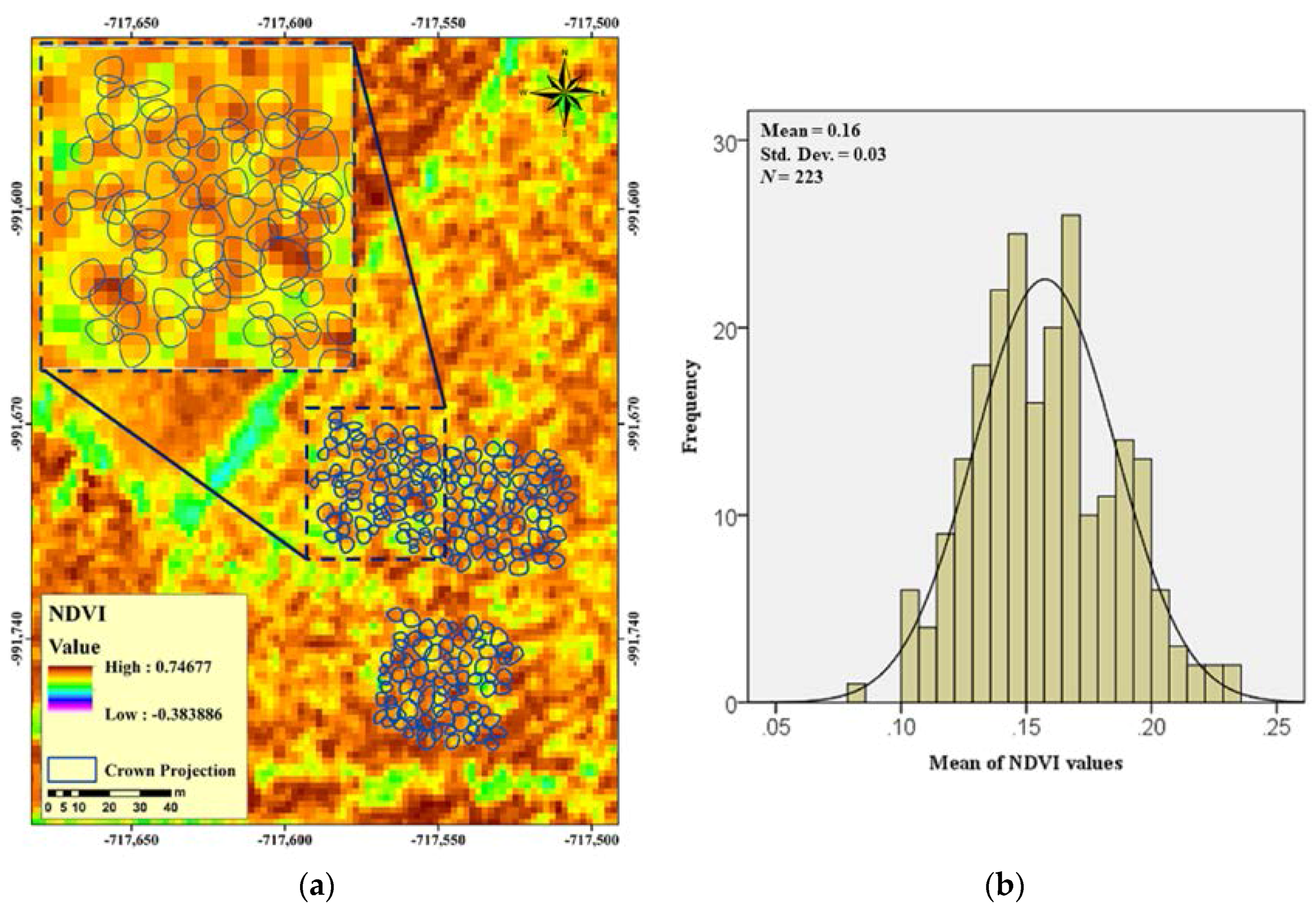
xmin are the maximum and minimum value for each band, respectively. In addition, using the nearest neighbor method, we resampled all three multi-spectral bands from the satellite from 2 m to 1 cm to assign more weight to pixels that cover more crown area (
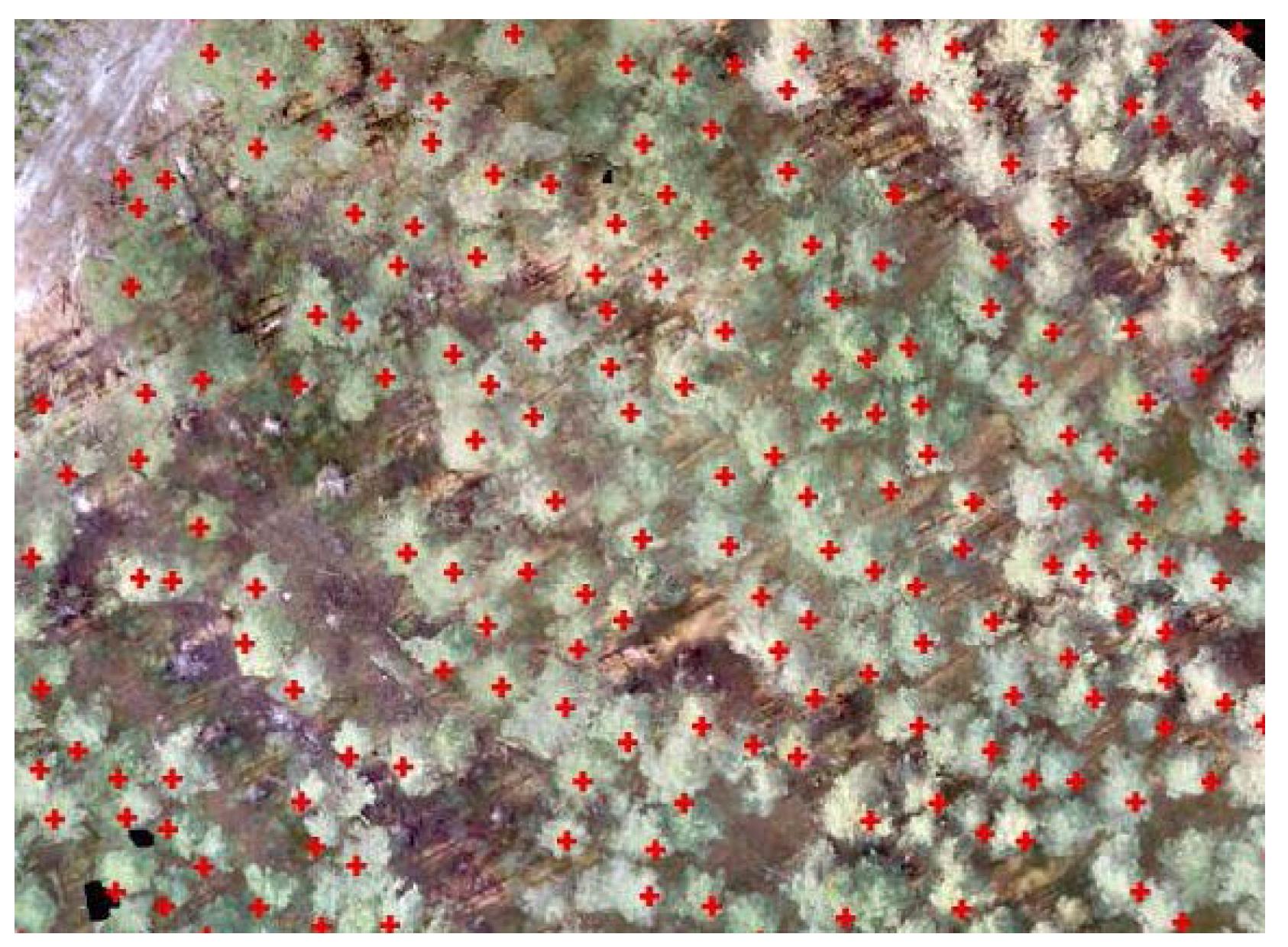
Figure 2). For extracting the spectral data (UAV and satellite), we used zonal statistics in ArcGIS desktop V.10.4.1 (ESRI Inc., Redlands, CA, USA), with the crown area for each individual tree as the zonal layer. We considered the same weight for averaging the DN values of pixels within the zonal layer.
To evaluate the greenness of the detected trees from the UAV and eliminate the dry trees and gap areas, the normalized difference vegetation index (NDVI) was used as a detector index (Equation (2)). This index is usually used to determine the visible spectral response by defining the ratio of greenness per individual tree applied to satellite data [
18]:
where
NIR stands for near-infrared and
R refers to the red band.
2.4. Estimation of Height
To extract the height from the UAV, we computed the CHM, which was derived from the subtraction of the DSM from the DTM. The local maxima algorithm was then used to estimate the height; this algorithm enhances the maximum value within a specified kernel size. As a first step, we used the focal statistics tool in ArcGIS to identify the highest pixel value using the CHM as the input data layer. We performed a low-pass filter to reduce the noise effect and regulate the values of the smoothing window [
19]. Among the several processing types we tested in different variances of radius using circular-shaped areas, the best results were at a kernel size with a radius of 1 m based on the average crown diameter derived from the ground measurements (
Figure 3). For matching the pixel values, we used the conditional if/else statement on each of the input cells of CHM and focal statistics results, by entering the following command “Con (“CHM” = “focal statistics result”, 1)” using the ArcGIS V. 10.4.1 (ESRI, Redlands, CA, United States) raster calculator.
This conditional tool performs an if/else statement on each input cell and it returns a binary layer with a value of zero assigned as no data and a value of one for data. Finally, the return value was the value when the CHM value equaled the focal statistics output.
2.8. Statistical Evaluation and Validation of Data
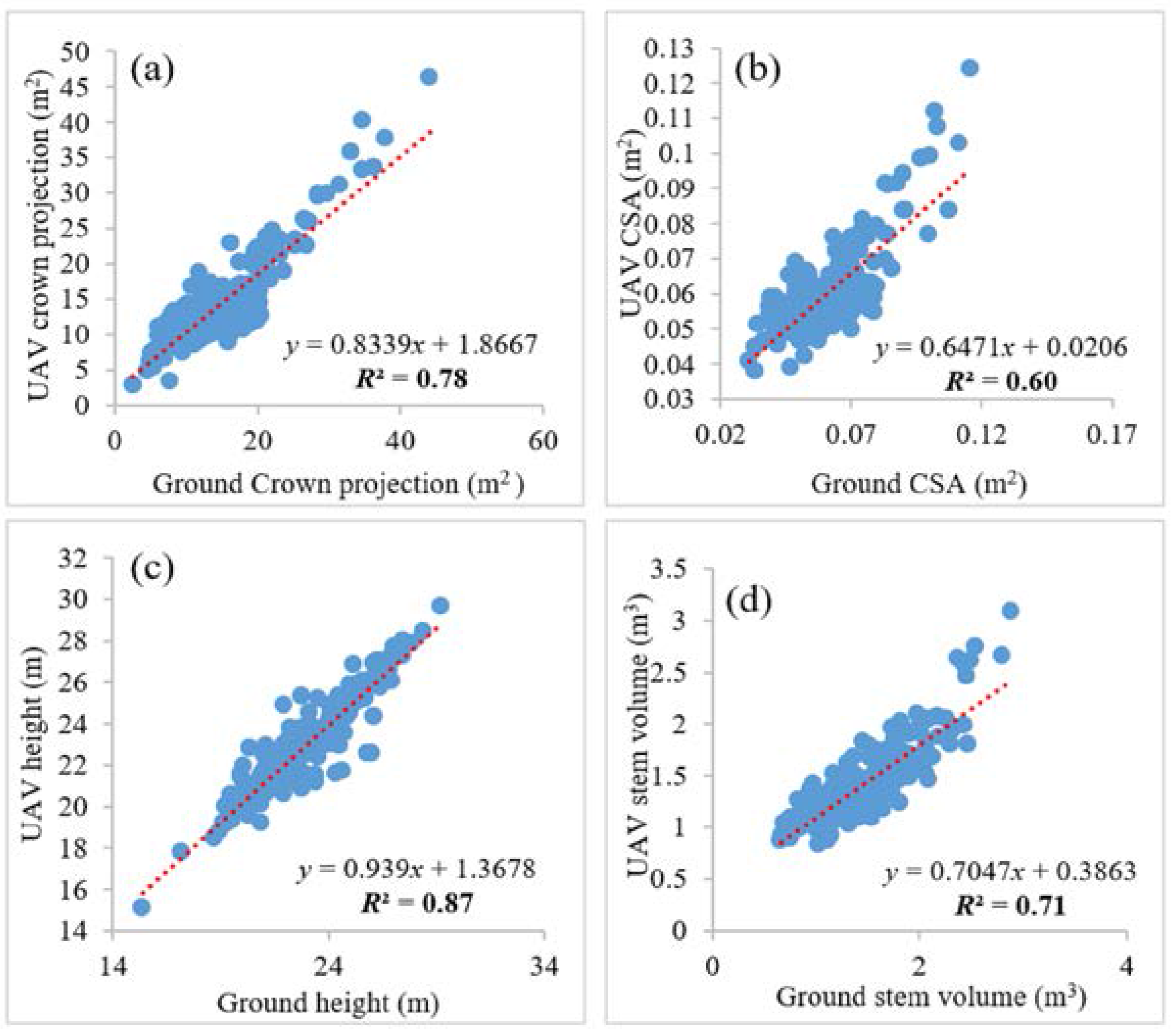
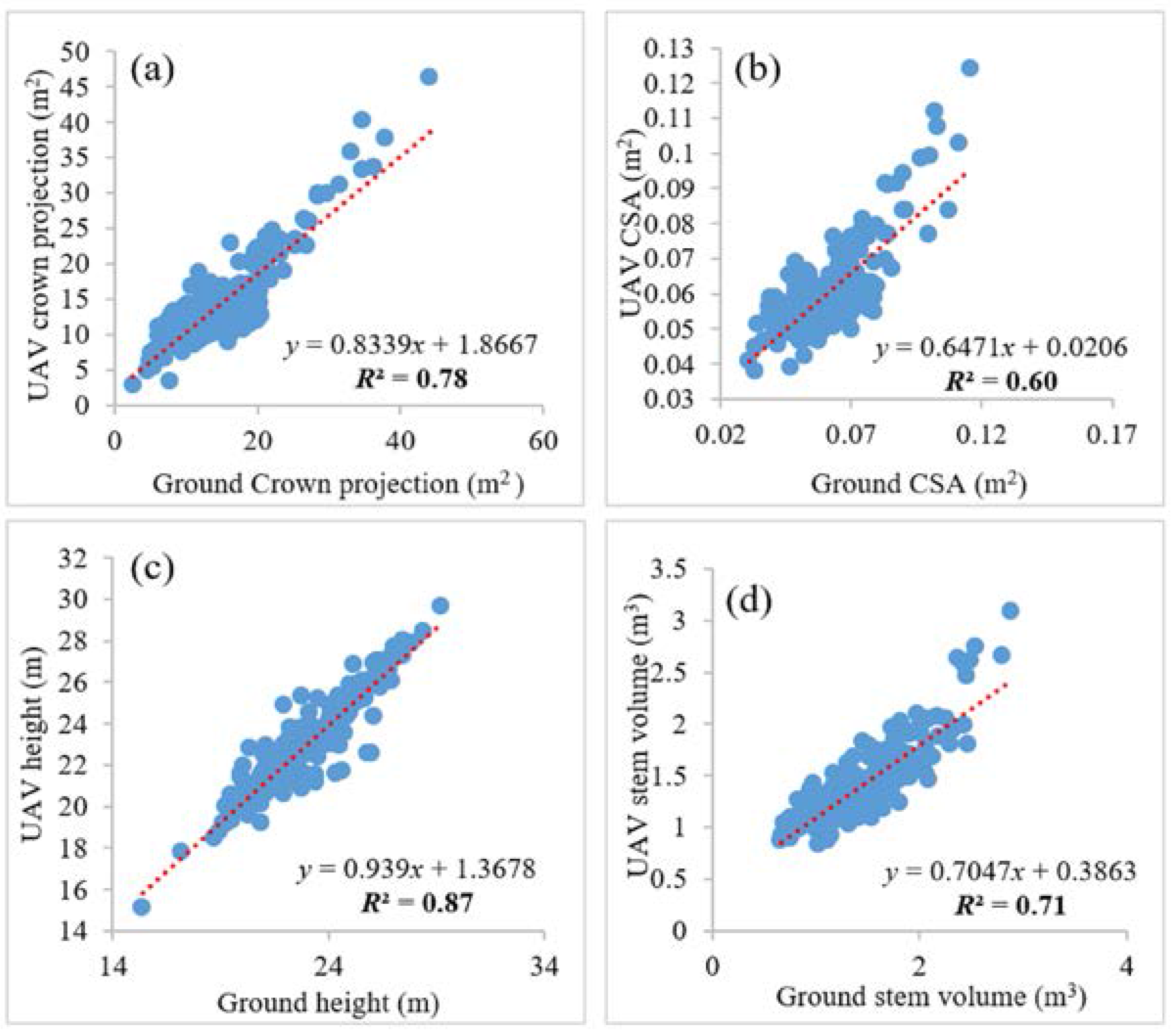
All statistical analyses were conducted in IBM SPSS V.24 (64-bit 2016) and Excel (Microsoft® Office). The linear regression was used to study correlation between the ground data and tree parameters predicted by the UAV.
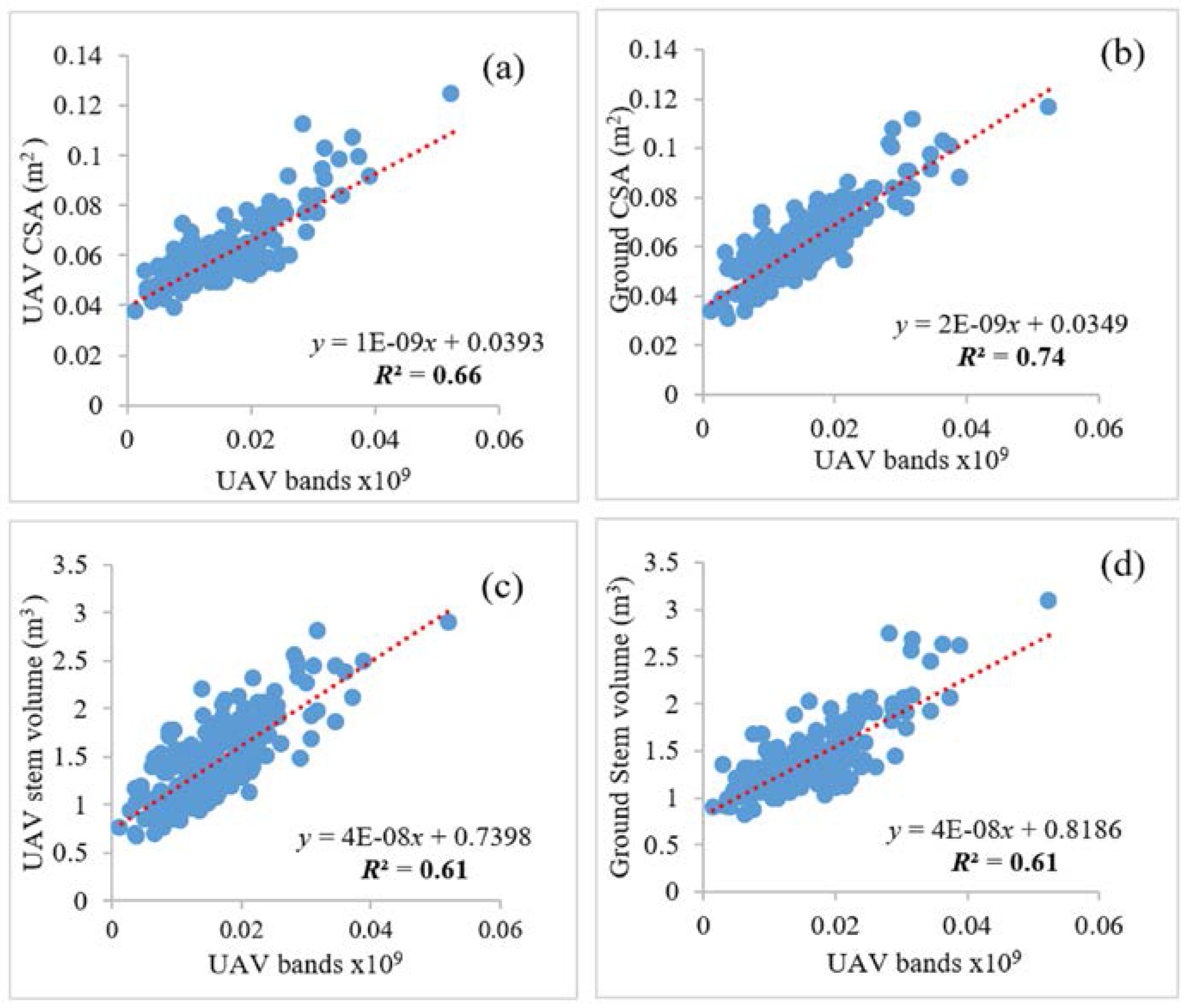
Pearson correlation coefficient was computed to analyze the relationships between the spectral values of the UAV RGB bands and tree parameters derived from ground inventory and UAV in two different probability values (
p < 0.05 and
p < 0.01). In this study, due to the lack of an IR band in the UAV approach, we computed the vegetation index (VI) [
22], green-red vegetation index (GRVI) [
22], and visible atmospherically-resistant index, green (VARI g) [
23] using the following equations:








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}