
Research on the Stability Control Strategy of Distributed Electric Vehicles Based on Cooperative Reconfiguration Allocation


Abstract
:1. Introduction
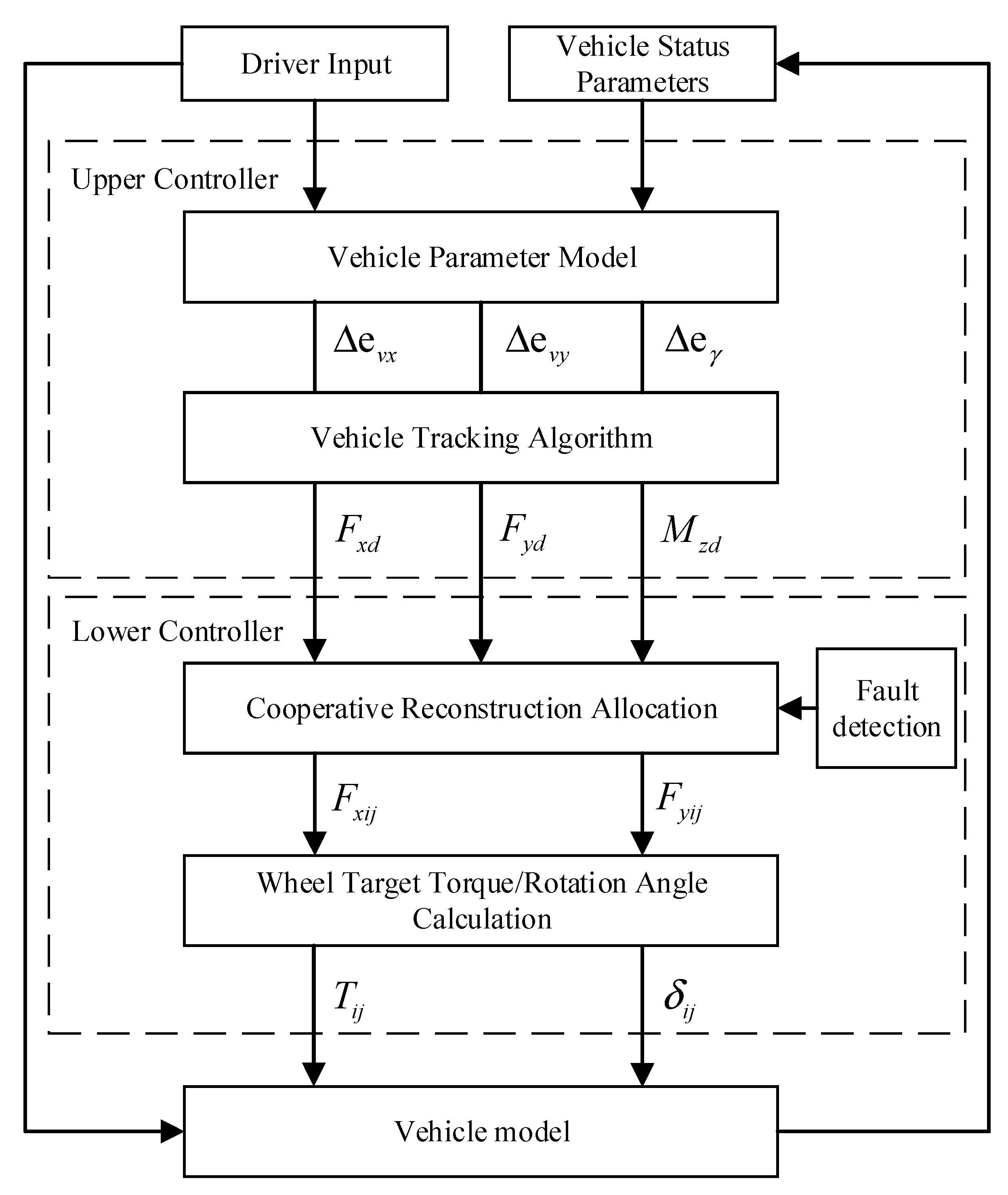
2. Controller Structure Design
2.1. Vehicle Modeling
2.1.1. Vehicle Dynamics Model
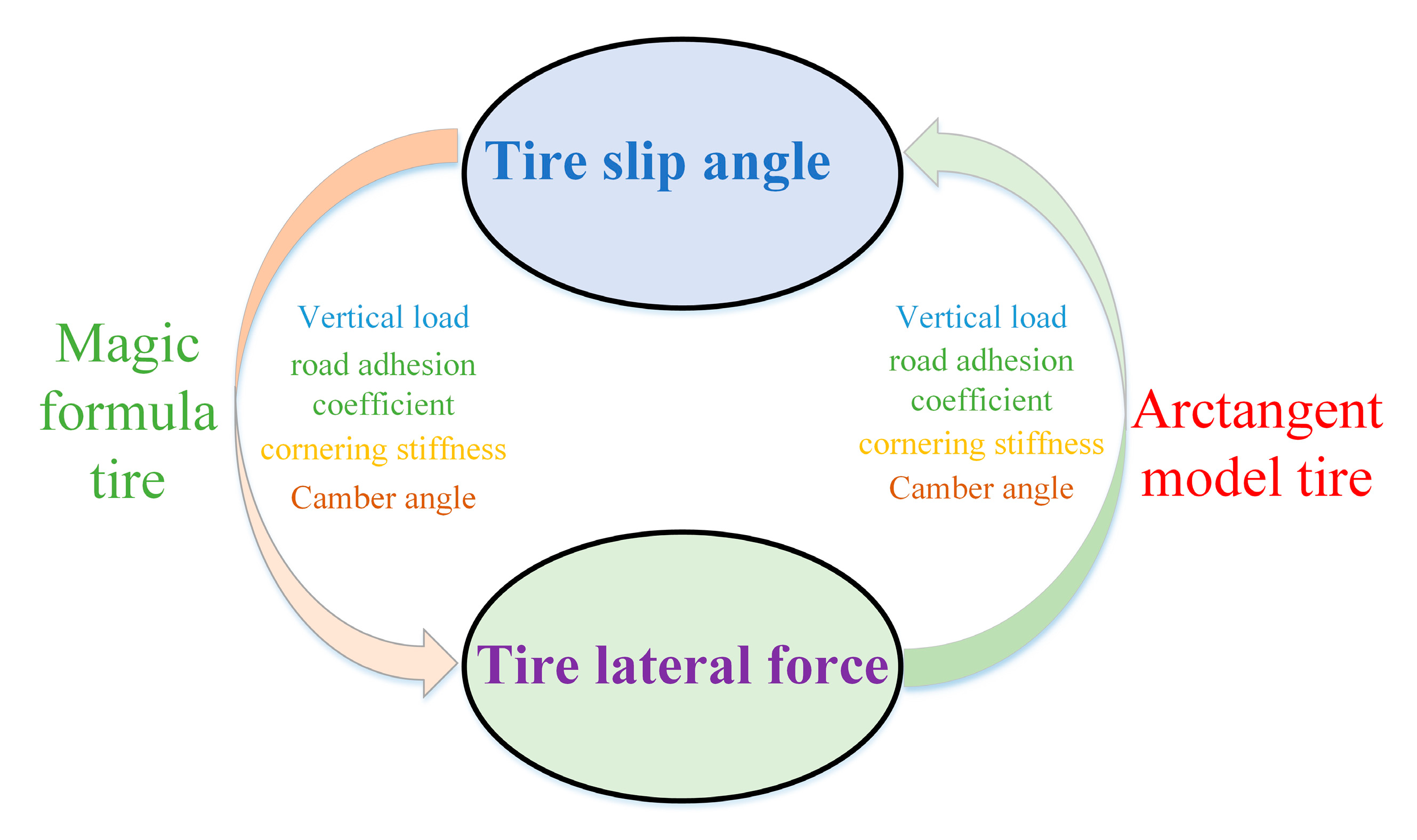
2.1.2. Tire Model
2.1.3. Motor Model
2.2. Upper Controller
2.2.1. Predictive Model
2.2.2. Constrained Optimization Solution
2.3. Lower Controller
2.3.1. Optimize the Objective Function
2.3.2. Tire Force Constraint
2.3.3. Calculated Wheel Angle
2.3.4. Failure Mode Control Strategy
3. Simulation and Analysis
3.1. Double Wheel Failure on a Straight Road
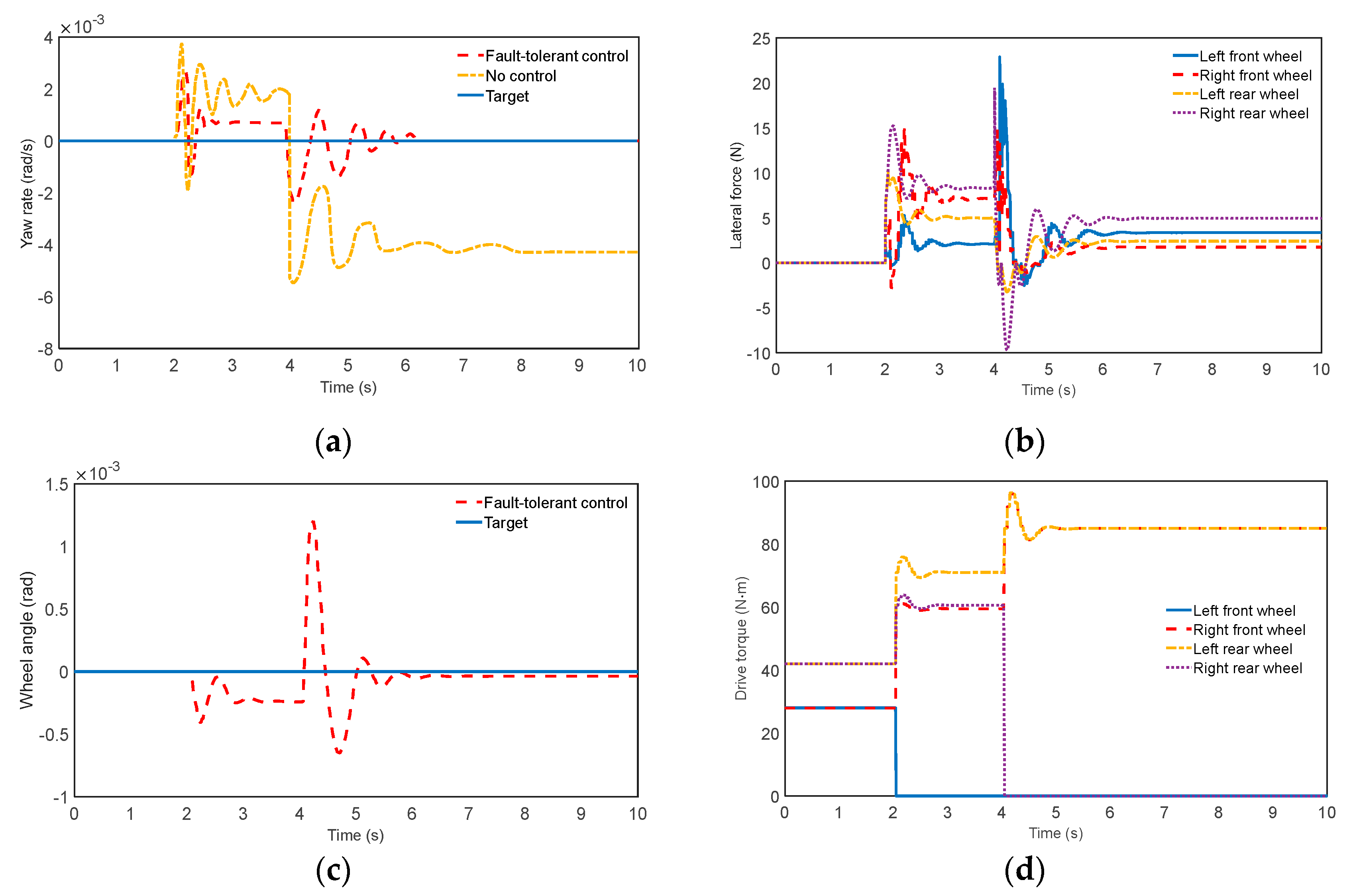
3.2. Single-Wheel Fail-in-Step Steering
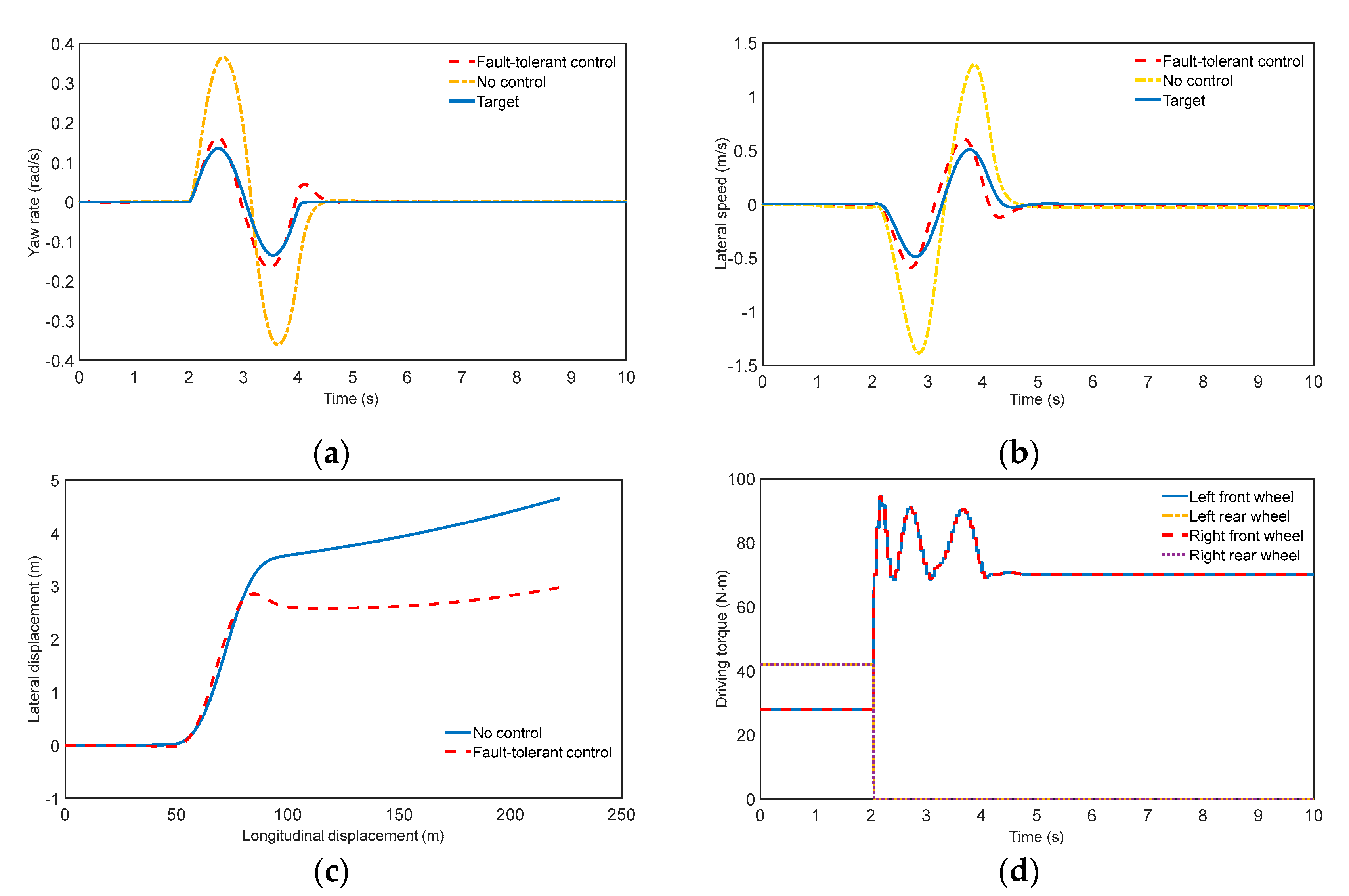
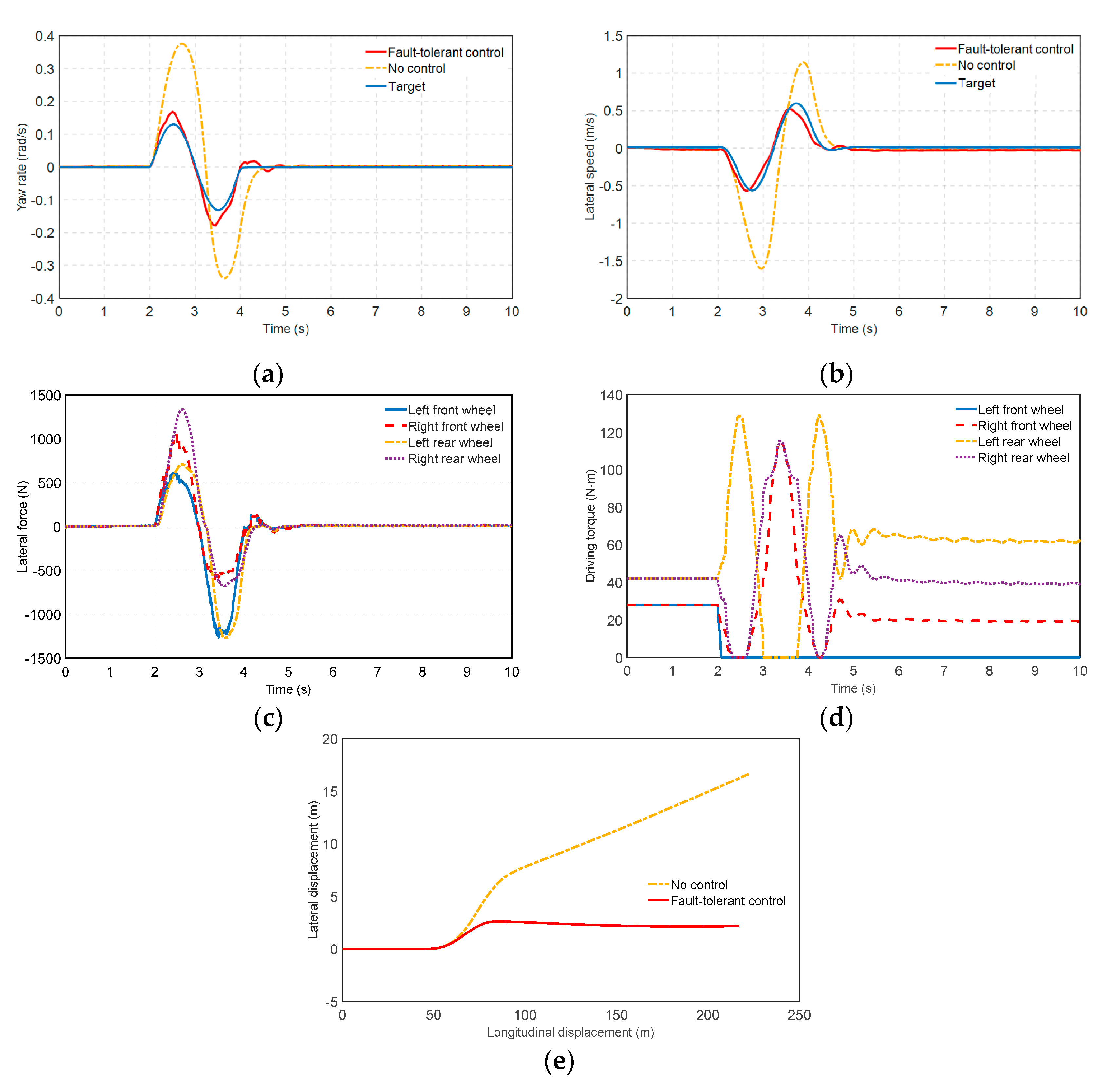
3.3. Double Wheel Failure in Sine Steering
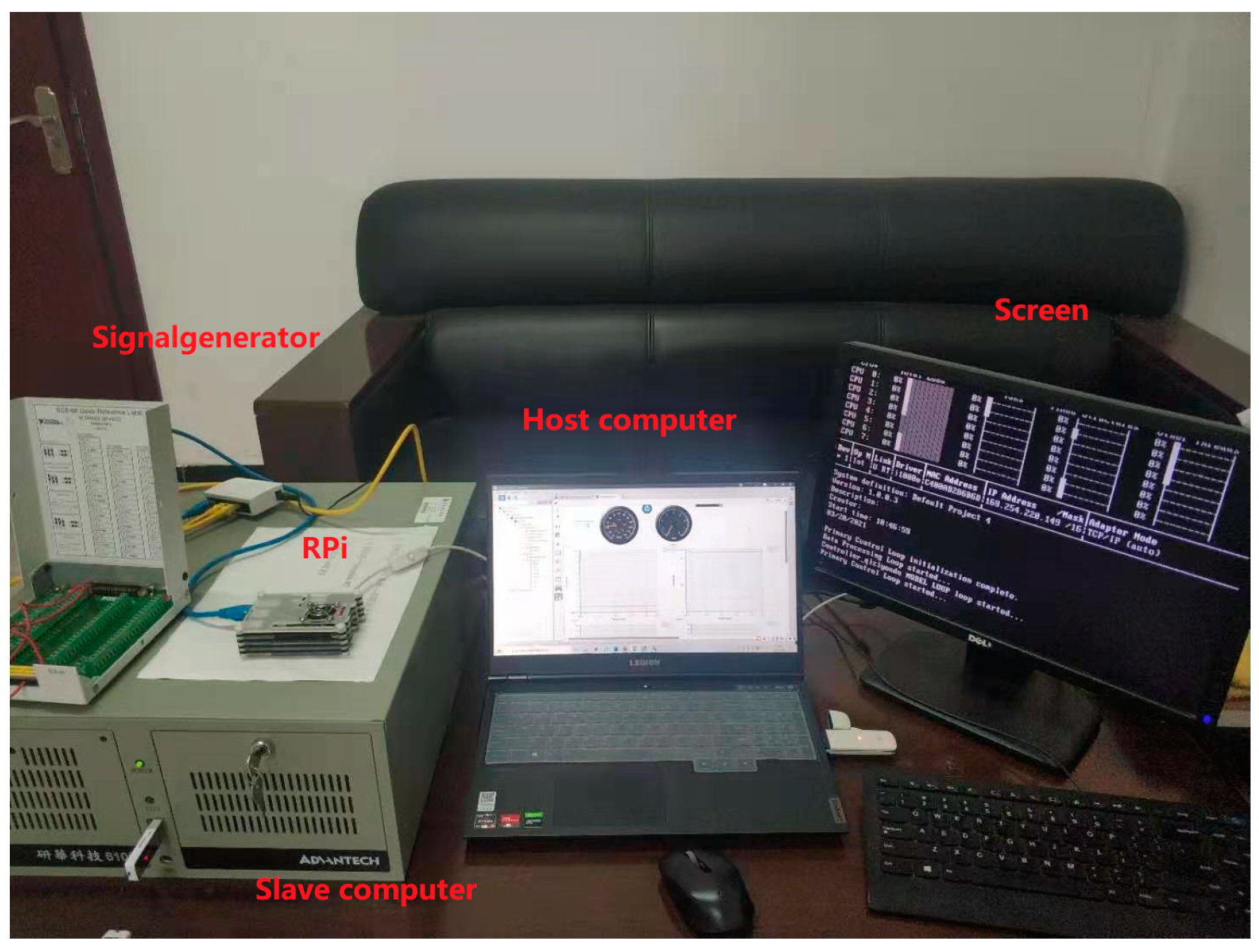
4. HIL Verification and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, Y.; Jiang, F.C.; Chen, R.; Luo, Y.G. Active fault-tolerant control based on MFAC for 4WID EV driving system. Automot. Eng. 2019, 41, 983–989. [Google Scholar]
- Tang, Y. Research on Drive System Failure Control for Distributed Drive Electric Vehicles; Harbin Institute of Technology: Harbin, China, 2017. [Google Scholar]
- Zhou, D.H.; Ding, X. Theory and applications of fault tolerant control. Acta Autom. Sin. 2000, 26, 788–797. [Google Scholar]
- Nguyen, T.-H.; Chen, B.-C.; Yin, D.; Huynh, P.-S. Active fault tolerant torque distribution control of 4 in-wheel motors electric vehicles based on Kalman filter approach. In Proceedings of the 2017 International Conference on System Science and Engineering (ICSSE), Ho Chi Minh City, Vietnam, 21–23 July 2017; pp. 360–364. [Google Scholar] [CrossRef]
- Pan, H.M.; Lei, Y.L.; Wang, Z.H. Fault diagnosis of permanent magnets of electric car hub motor based on wavelet analysis. China Mech. Eng. 2016, 27, 1488–1492. [Google Scholar]
- Zhou, Z. Research on Fault Diagnosis Method of Hub Motor Bearing Based on Sparse Representation; Jiangsu University: Zhenjiang, China, 2019. [Google Scholar]
- Li, Z.X.; Qin, X.; Xue, H.T. In-wheel motor fault diagnosis method based on BN and improved DST. J. Huazhong Univ. Sci. Technol. 2021. [Google Scholar]
- Wang, R.; Wang, J. Fault-Tolerant Control for Electric Ground Vehicles With Independently-Actuated In-Wheel Motors. J. Dyn. Syst. Meas. Control. 2012, 134, 021014. [Google Scholar] [CrossRef]
- Wang, R.; Wang, J. Actuator-Redundancy-Based Fault Diagnosis for Four-Wheel Independently Actuated Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2013, 15, 239–249. [Google Scholar] [CrossRef]
- Zhou, W.Q.; Qi, X.; Chen, L.; Xu, X. Vehicle state estimation based on the combination of unscented kalman filtering and genetic algorithm. Automot. Eng. 2019, 41, 198–205. [Google Scholar]
- Chen, T.; Chen, L.; Cai, Y.F. Cascaded method for running state estimation of four-wheel independent drive electric vehicles. J. Cent. South Univ. 2019, 50, 241–249. [Google Scholar]
- Zhang, L. Research on State Estimation and Torque Vectoring Control of Distributed Drive Electric Vehicles; Jilin University: Changchun, China, 2019. [Google Scholar]
- Isa, K. Experimental Studies on Dynamics Performance of Lateral and Longitudinal Control for Autonomous Vehicle Using Image Processing. In Proceedings of the IEEE International Conference on Computer & Information Technology Workshops, Sydney, Australia, 8–11 July 2008; pp. 411–416. [Google Scholar] [CrossRef] [Green Version]
- Jalali, K.; Uchida, T.; McPhee, J.; Lambert, S. Development of an Integrated Control Strategy Consisting of an Advanced Torque Vectoring Controller and a Genetic Fuzzy Active Steering Controller. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2013, 6, 222–240. [Google Scholar] [CrossRef] [Green Version]
- Katriniok, A.; Maschuw, J.P.; Christen, F.; Eckstein, L.; Abel, D. Optimal vehicle dynamics control for combined longitudinal and lateral autonomous vehicle guidance. In Proceedings of the European Control Conference, Zurich, Switzerland, 17–19 July 2013. [Google Scholar] [CrossRef]
- Xie, B.Y. Vehicle Cooperative Control Based on Information Exchange and Motion Coupling; Tsinghua University: Beijing, China, 2014. [Google Scholar]
- Dai, Y.F. Integrated Longitudinal and Lateral Motion Control of Distributed Electric Vehicles; Tsinghua University: Beijing, China, 2013. [Google Scholar]
- Jiao, G.K. Study on Longitudinal and Lateral Force Coordinated Control of Four Wheel Independent Driving/Steering Electric Vehicle; Chongqing University: Chongqing, China, 2018. [Google Scholar]
- Amato, G.; Marino, R. Fault-Tolerant Distributed and Switchable PI Slip Control Architecture in Four In-Wheel Motor Drive Electric Vehicles. In Proceedings of the Mediterranean Conference on Control and Automation (MED), Saint-Raphael, France, 16–18 September 2020; pp. 7–12. [Google Scholar] [CrossRef]
- Goodarzi, A.; Mohammadi, M. Stability enhancement and fuel economy of the 4-wheel-drive hybrid electric vehicles by optimal tyre force distribution. Veh. Syst. Dyn. 2013, 52, 539–561. [Google Scholar] [CrossRef]
- Kumarawadu, S.; Lee, T.T. Neuroadaptive Combined Lateral and Longitudinal Control of Highway Vehicles Using RBF Networks. IEEE Trans. Intell. Transp. Syst. 2006, 7, 500–512. [Google Scholar] [CrossRef]
- Devineau, G.; Polack, P.; Altche, F.; Moutarde, F. Coupled Longitudinal and Lateral Control of a Vehicle using Deep Learning. In Proceedings of the Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 642–649. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Cao, K.; Li, K. Coordinated Control of Longitudinal/Lateral/Vertical Tire Forces for Distributed Electric Vehicles; Tsinghua University: Beijing, China, 2014. [Google Scholar] [CrossRef]
- Xia, Z.K. Research on Fault-Tolerant Control Method of Yaw Stability of Distributed Electric Vehicle; Chongqing University of Technology: Chongiqng, China, 2019. [Google Scholar]
- Pauca, O.; Caruntu, C.F.; Lazar, C. Predictive control for the lateral and longitudinal dynamics in automated vehicles. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–11 October 2019; pp. 797–802. [Google Scholar]
- Wang, R.C.; Wei, Z.D.; Ye, Q. A research on visual preview longitudinal and lateral cooperative control of intelligent vehicle. Automot. Eng. 2019, 41, 763–770. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Dai, Y.F.; Luo, Y.G.; Li, K.Q. Dynamic coordinated control for a full hybrid electric vehicle with single motor. Automot. Eng. 2011, 33, 1007–1012. [Google Scholar]
- Liu, J.; Jayakumar, P.; Overholt, J.L.; Stein, J.L.; Ersal, T. The Role of Model Fidelity in Model Predictive Control Based Hazard Avoidance in Unmanned Ground Vehicles Using LIDAR Sensors. In Proceedings of the Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013. [Google Scholar] [CrossRef] [Green Version]
- Shin-Ichiro, S.; Hideo, S.; Yoichi, H. Dynamic driving/braking force distribution in electric vehicle with independently driven four heels. IEEE Trans. Ind. Appl. 2000, 138, 79–89. [Google Scholar]
- Kranz, T.; Hahn, S.; Zindler, K. Nonlinear Lateral Vehicle Control in Combined Emergency Steering and Braking Maneuvers. In 2016 IEEE Intelligent Vehicles Symposium (IV); IEEE: Manhattan, NY, USA, 2016; pp. 603–610. [Google Scholar]
- Wang, H.; Han, J.; Zhang, H. Lateral Stability Analysis of 4WID Electric Vehicle Based on Sliding Mode Control and Optimal Distribution Torque Strategy. Actuators 2022, 11, 244. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S. Fault-tolerant control for four-wheel independent actuated electric vehicle using feedback linearization and cooperative game theory. Control Eng. Pract. 2020, 101, 104510. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Failure Mode | Failure Constraints (Example) | Controllable or Not |
|---|---|---|
| A single drive motor failure | Controllable | |
| Two diagonal drive motors failure | Controllable | |
| Two coaxial drive motors failure | Controllable | |
| Two ipsilateral drive motors failure | Uncontrollable | |
| Three drive motors failure | Uncontrollable | |
| Four drive motors failure | Uncontrollable |
| Vehicle Parameters | Values |
|---|---|
| Vehicle mass | 870 |
| Distance from front axle to center of mass | 1.013 |
| Distance from rear axle to center of mass | 0.702 |
| Centroid height | 0.51 |
| Moment of inertia | 617 |
| Wheel pitch | 1.3 |
| Wheel radius | 0.302 |
| Peak power | 6900 |
| Rated power | 4700 |
| Maximum speed | 1055 |
| Rated speed | 440 |
| Peak torque | 150 |
| Time constant | 0.01 |
| Road adhesion coefficient | 0.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ou, J.; Yan, D.; Zhang, Y.; Yang, E.; Huang, D. Research on the Stability Control Strategy of Distributed Electric Vehicles Based on Cooperative Reconfiguration Allocation. World Electr. Veh. J. 2023, 14, 31. https://doi.org/10.3390/wevj14020031
Ou J, Yan D, Zhang Y, Yang E, Huang D. Research on the Stability Control Strategy of Distributed Electric Vehicles Based on Cooperative Reconfiguration Allocation. World Electric Vehicle Journal. 2023; 14(2):31. https://doi.org/10.3390/wevj14020031
Chicago/Turabian StyleOu, Jian, Dehai Yan, Yong Zhang, Echuan Yang, and Dong Huang. 2023. "Research on the Stability Control Strategy of Distributed Electric Vehicles Based on Cooperative Reconfiguration Allocation" World Electric Vehicle Journal 14, no. 2: 31. https://doi.org/10.3390/wevj14020031