1. Introduction
The measurement of the absolute calibration constant is vital to the radiometric calibration of synthetic aperture radar (SAR) systems, which influences the quantitative application of SAR, such as soil moisture mapping, marine parameters measurement, and biomass retrieval [
1,
2,
3,
4]. Manmade calibrators, like transponders, corner reflectors, and ground receivers, are commonly used to measure the calibration constant. They have known radar cross sections (RCSs) with a high radiometric accuracy (better than 0.2 dB) [
5,
6,
7]. The calibrators are usually placed in a uniform and low noise field. The calibration constant is calculated as the difference between the calibrator’s true RCS and its image intensity. However, the layout and maintenance of calibrators is costly; therefore, the calibrator-based method can only be conducted a few times in the whole lifetime of the SAR [
5], which influences the measurement accuracy of the constant. Monitoring of the constant is usually undertaken by the measurement of Amazon rainforest, which is a temporal stable and azimuthally isotropic natural target [
8,
9,
10]. The measurements of Radarsat-1 show that, if it chose a suitable area in Amazon, the backscatter coefficients of rainforest in C-band SAR are concentrated on −6.5 dB with a standard deviation of less than 0.3 dB [
11]. Therefore, its backscatter coefficient can be used as a calibration reference. However, the Amazon rainforest is located in a specific geographical area, so it can only be illuminated in the intervals of the observation tasks. Thus, the frequency of the constant measurement cannot be guaranteed.
Besides the manmade calibrators and rainforests, the researches about calibration reference mainly focus on deserts, oceans, and permanent scatters (PSs). The study about the Simpson Desert shows that its backscattering coefficients are consistently 12 dB with a root mean square error (RMSE) of 0.2 dB as time changes and the accuracy when it is used to cross-calibrate radar altimeters is about 1 dB [
12]. However, the desert’s backscattering stability depends on the surface topography and soil moisture. Oceans can also be used to derive the calibration constant, using the empirical models of the relationship between the oceans’ backscatter coefficient and the wind speed. The accuracy is about 0.5 dB when it is used to calibrate ERS-2 SAR images [
13]. Nevertheless, this method needs massive images to fit the model and then to obtain model parameters; so its accuracy is susceptible to the quantity and selection of dataset. Moreover, these two methods cannot resolve the regional-restricted problem and the accuracy is relatively low. The method based on PS has also been studied. PSs usually appear in urban areas, rocky areas, and some P-land forests [
14]; they can be detected in SAR images by the coherent or noncoherent methods in D’Aria, D et al. and Iannini, L et al. [
14,
15]. Since the RCSs rarely change with time, they can relatively calibrate multi-temporal images. If their RCSs are calibrated by corner reflectors or transponders, they can be used in absolute calibration. It has been proved that the stability of this method is better than 0.1 dB and the calibration difference between this method and the transponder method is less than 0.2 dB [
1,
16]. However, this method requires repeated-pass images with highly similar imaging geometry, such as the images that were used for differential interferometric applications [
14].
Given the above, the existing methods are difficult to measure the calibration constant continuously. If a stable backscattering feature can be found in common imaging scenes, we can extract this feature and use it as a calibration reference to monitor the constant, while the radar is performing normal observation tasks. Therefore, we analyzed the backscattering stability of different categories of objects and extracted a stable feature in urban areas. Some previous work had been presented in Yang, J [
17], in this study, we verified the backscattering stability of urban areas from other cities and other beams, and further improved the stability using a combined filtering model. It should be noted that the term “feature” in the article refers to the statistical value that are directly related to the backscatter coefficients of the ground objects.
The structure of this paper is as follows.
Section 2 introduces the Sentinel-1 dataset and the method of establishing a database. In
Section 3, we describe the methods of analyzing and extracting the stable feature. We compare the backscattering stability of different categories and select the most stable one. Then, we propose a method based on neural networks to finely filter within this category and then obtain a more stable backscattering feature. In
Section 4, we present the stability results of the extracted feature. Then, we validate its stability by a contrast experiment with rainforest and propose a calibration scheme that is based on it. In
Section 5, we discuss the advantages and disadvantages of the calibration method based on this stable feature, and we point out the further research in the future.
Section 6 summarizes the full text.
3. Analysis Method
After establishing the sample database, we can use it to analyze and extract the stable backscattering feature of the ground objects. The method is shown in
Figure 3. Firstly, we need to determine a description feature of backscatter coefficients in an image slice, and then compare the temporal stability of this feature among different ground categories to select the most stable category. Secondly, we propose a classification method based on neural networks to finely filter the more stable image slices of this category, using, respectively, SAR images and the combination of SAR and optical images. After filtering, stable image slices are selected; then, we can use them to obtain a more stable backscattering feature.
3.1. Selecting a Stable Ground Category
We have found that the median value is an appropriate description feature of backscatter coefficient through a theoretical analysis in (Yang, J) [
17]; therefore, we compared the stability of this feature among different categories. In particular, the stability that is mentioned in this paper mainly refers to the temporal stability, the characteristic that the backscatter coefficient changes little in the long term. To describe temporal stability, we introduced the concept of “identical slices” to refer to slices that are corresponding to the same geographical area in different images, as shown in
Figure 4. The temporal stability was measured by the standard deviation of the identical slices’ medians. The ground category with the smallest standard deviation will be selected.
In the experiment, we used 33 multi-temporal images that operated on beam S3 in Houston and classified them into 17 categories of slices that were based on the method mentioned in
Section 2.2. The classification result of the identical slices is shown in
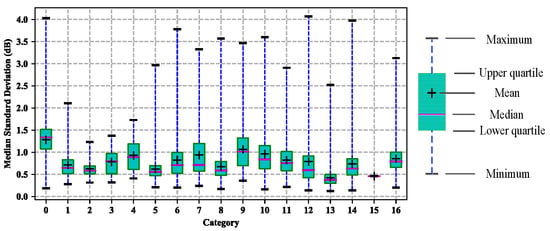
Figure 5. For each slice, we calculated a median value of backscatter coefficients. For each group of identical slices, we determined the standard deviation of 33 medians. To evaluate the backscattering stability of each category, we calculated the minimum, lower quartile, median, mean, higher quartile, and maximum of all the standard deviations of the same category. These values are shown as a box plot in
Figure 6.
The quantities of categories 1, 3, 4, 7, 9, and 15 are too small; these categories have not been included in the analysis because conclusions that are based on them are not representative in the statistical sense. Among the remaining 11 categories, the box of the 13th category named “Urban and built-up” (hereinafter “urban areas”) was the flattest with the lowest position; this indicated that the median standard deviations of the identical slices in urban areas were concentrated on a smaller value, and their average was 0.42 dB. Some types of vegetation cover, such as the 14th category of cropland/natural vegetation mosaic, the 12th type of croplands, and the 10th type of grasslands, have certain growth cycles. Therefore, different growth stages and different water contents can lead to large changes in their backscatter coefficients with changing seasons. However, artificial objects, such as buildings, roads, and bridges in urban areas are not so easily influenced by the season as natural objects; thus, their backscatter coefficients are relatively more stable over time. Therefore, we selected urban areas as a stable ground category.
3.2. Extracting the Stable Backscattering Feature Using Synthetic Aperture Radar (SAR) Images
Although urban areas’ backscattering was generally stable, we could see from
Figure 6 that the median standard deviations of identical slices in urban areas ranged from 0.1 dB to 2.5 dB, that is, stable or unstable differences were still present among the slices of urban areas. In order to figure out the spatial distribution of the stable or unstable urban slices, we drew the median standard deviations of all the groups of identical slices in urban areas, as
Figure 7 shows. We can see that the image brightness of the stable slices is overall uniform with a few strong scattering points. The corresponding actual objects are mainly low residential areas having similar heights and shapes. Unstable slices behave very brightly in the images, and the corresponding actual objects are mainly downtown areas and buildings having very different heights and shapes.
Since there were obvious differences in the stable and unstable SAR images, we used a two-class classification model to finely filter the urban slices—the unstable ones were filtered out, and the stable ones were chosen. We determined the positive and negative samples by using a threshold of the median standard deviation of the identical slices.
Figure 7 shows that 0.3 dB is a suitable threshold to distinguish two kinds of SAR image slices. Therefore, positive samples were those identical slices whose median standard deviations were less than or equal to 0.3 dB, whereas the negative samples were those whose median standard deviations were greater than 0.3 dB.
Figure 8 shows some examples of positive and negative slices. To evaluate the model’s classification performance, recall ratio, and precision ratio were used; they were calculated as follows:
where
,
, and
are, respectively, the number of times that the model identified the positive samples as positive, the positive samples as negative, and the negative samples as positive. A higher recall ratio indicates that the model can classify more positive slices as positive ones; a higher precision ratio indicates that more slices of those that are classified as positive by the model are actually positive.
We randomly chose 15 SAR images in Houston (S3) as the training set and the other 18 images were the test set, with each image containing 9826 slices of urban areas. We used a full-connected neural network (FNN) as the classification model (as shown in
Figure 9). The input was the urban slice’s image intensity. To make pre-calibrated images and after-calibrated images equivalent to the model, the inputs were preprocessed by converting to the decibel form and then reducing the average level, since the after-calibrated images differ by only a calibration constant from pre-calibrated images, according to the Equation (3):
where
is the backscatter coefficient;
is the image intensity after internal calibration, antenna pattern correction, and slant range normalization; and,
is the absolute calibration constant; all variables are in decibels.
Testing on 18 Houston (S3) images, the FNN model obtained an average recall ratio of 97.98% and an average precision of 80.39%.
Figure 10 draws the histogram of the median standard deviations of the identical slices before and after filtering. We could see that almost all of the positive samples were identified as positive, and only a few of those slices identified as positive were actually negative. Therefore, the FNN model has good filtering ability, which also indicates that the two classes divided by 0.3 dB are separable.
However, when the model trained by Houston (S3) images was applied on Houston (S6) and Chicago (S4) datasets, the filtering performance got worse. From
Table 2, it could be seen that the precision recall of Houston (S6) was only 59.02%. For Chicago (S4) dataset, there were only two actually positive samples, but the model classified about 1128 slices as positive ones, indicating that the model had poor classification ability on this dataset. The model that was trained by S3 dataset has bad generalization ability on datasets from other beam or other city. One possible reason is that the resolution of images that were used in this study is not high enough and the ability of SAR images to express information is relatively weaker than that of optical images. Thus in next section, we proposed a method that used both SAR and optical images to finely filter the urban slices.
3.3. Extracting the Stable Backscattering Feature Using the Combination of Synthetic Aperture Radar (SAR) and Optical Images
Optical images have better information expression ability; therefore, they were added to the classification model to achieve better filtering performance. The features that were extracted from the optical and SAR images were different in the physical sense. Thus, they were used to train two separate models. Then, the results of these two models were combined by voting to produce the final classification result, that is, the final result was positive only when the results of both models were positive. Since the SAR model has been described in
Section 3.2, we introduced how to train an optical model in this section.
Firstly the optical image slices of urban areas should be obtained. We used the software named BIGEMAP (Chengdu BIGEMAP Data Processing Co., Ltd., Chengdu, China, version 20.0.0) to crop the optical images in Houston and Chicago from Google Earth, with a resolution of 4.78 m. Then, the urban slices were extracted from these images using the method that was mentioned in
Section 2.2. Since a group of identical slices in the SAR images corresponded to the same slice in the optical image, the quantity of optical slices that could be used to train the model were much smaller than that of SAR slices. There were only 9826, 6809, and 4296 optical slices of Houston (S3), Houston (S6), and Chicago (S4) datasets, respectively. Since the quantity of the optical slices was small, we used a pre-trained CNN model named SqueezeNet as the optical classification model and used the optical slices in Houston (S3) to fine-tune the model. SqueezeNet is a small deep learning neural network structure (see
Figure 11); it can achieve the accuracy that is comparable to AlexNet with 50 times fewer parameters [
22].
The weights of the pre-trained SqueezeNet model were downloaded from Github (
https://github.com/rcmalli/keras-squeezenet/releases). We used 80% of the optical slices of Houston (S3) dataset as the training set and 20% as the validation set. After fine-tuning, SqueezeNet achieved 86% and 85% accuracy on training and validation set, respectively. The filtering performance of optical model on three datasets is shown in
Table 3. When compared to the SAR model, the optical model improved the precision ratio of the Houston (S6) dataset and classified less slices of the Chicago (S4) dataset as positive. However, the recall and precision ratio on Houston (S3) got lower. In order to utilize the advantages of two models, we combined their classification results by voting. The performance of the combined model is shown in
Table 4. We could see that, when compared with the SAR model and the optical model, the combined model increased the precision ratio at the expense of the reduction of recall ratio, both for Houston (S3) and Houston (S6) datasets. Since the purpose of filtering is to obtain stable urban slices and then use them to extract stable feature, the precision ratio is more important than recall ratio. In this sense, the combined model performed well, with the precision ratios of 96.40% and 90.16% on two Houston datasets. For Chicago, there were only 131 slices extracted, which was in line with the reality. Therefore, we can use this combined model to classify all of the urban slices; then, select the positive samples and only use them to extract stable backscattering feature.
In order to clarify how the spatial distribution of urban slices changes after combined model filtering, we draw the figures as below. When compared with all urban slices in
Figure 12a, the stable urban slices in
Figure 12b,c correspond to those areas where the image brightness is not very strong. In addition, the stable slices that were extracted by the model (see
Figure 12c) are similar to the actually stable slices (see
Figure 12b) in the terms of spatial distribution. Therefore, the stable slices after combined model filtering are still representative to estimate the calibration constant.
5. Discussion
Since it is difficult for exiting methods to monitor the absolute calibration constant continuously, we need to find a stable backscattering feature in common scenes and use it as a calibration reference. In this paper, we proposed a method of analyzing and exacting the stable backscattering feature, and finally determined that the median center of backscatter coefficients in urban areas is a stable feature with a temporal standard deviation of 0.19 dB. A contrast experiment suggests that this feature is even more stable than the of the Amazon rainforest. Then, we provided a scheme of calculating the calibration constant using this feature. The estimation errors were within 0.5 dB when it was tested by three datasets.
Different from those distributed targets that are concentrated in a specific area, urban areas are dispersedly distributed in common imaging scenes. Therefore, the radar can easily obtain urban images while completing the normal observation tasks and monitor the calibration constant from these images without the regional restriction of calibration field. Thus, it can increase the measurement frequency of the constant and is then beneficial for improving the accuracy of the calibration constant. Furthermore, this feature has a better temporal stability than the distributed targets.
When compared with the method based on PSs, this scheme reduces the demanding for registration, although these two methods have similar estimated accuracy. The PSs-based method needs lots of long-term and coherent PSs in the imaging scenes, whereas the feature used in this scheme is the statistical median center of urban slices, which is more fault-tolerant, and therefore is simpler to implement.
Nevertheless, there are still several problems. The stability analysis requires multi-temporal images from the same city, so we used only two cities for analysis and validation due to the lack of data. Verification experiments on other cities need to be conducted to draw a more general conclusion. Despite this, the difference in backscattering stability between these two cities is still obvious, as we find that the stability of urban areas in Houston is 0.19 dB but 0.45 dB in Chicago. Further studies should be carried out to figure out the reasons, such as the influence of the precipitation, and then eliminate the differences. The SAR images that are used in this paper have a relatively low resolution, which affects the classification results of the model. If there are images with higher resolution available, then the filtering performance may be better.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}