Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability

 , ,
, ,  , ,
, ,
Abstract
1. Introduction
2. Calibration Status of Landsat 8 Operational Land Imager (OLI)
2.1. Sensor Description
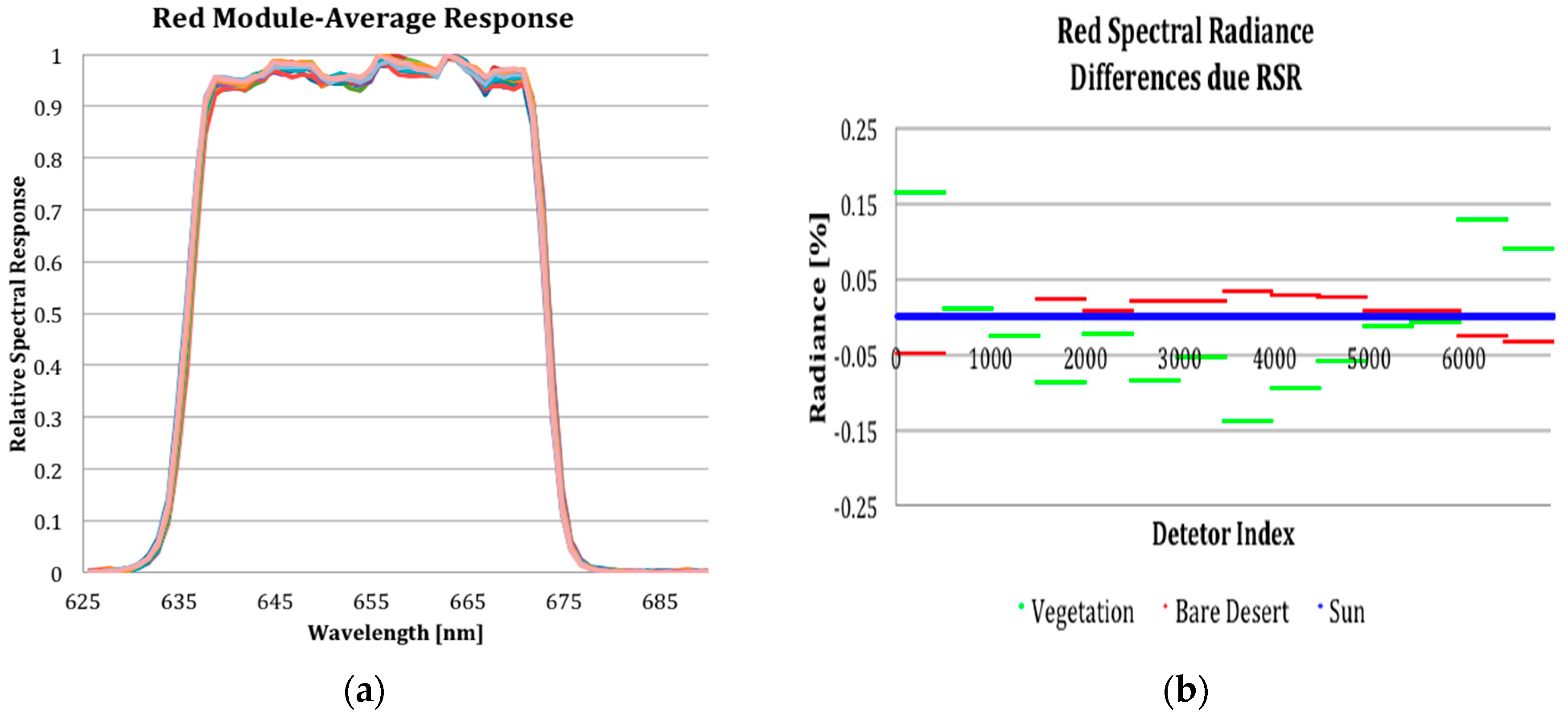
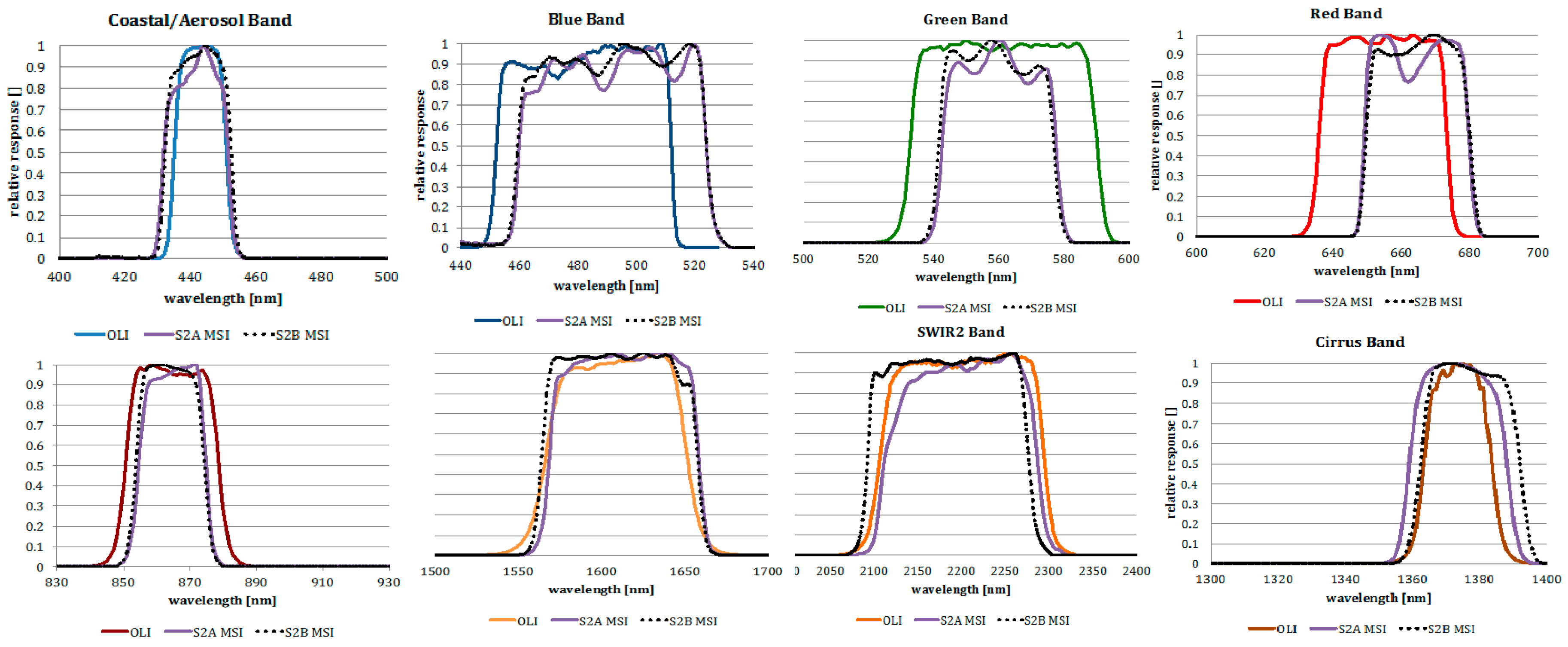
2.2. Spectral Characterization
2.3. Prelaunch Radiometric Characterization and Calibration
2.4. On-Orbit Radiometric Calibration of OLI
2.5. Landsat-8 Geometric Calibration
2.5.1. Geometric Calibration Parameters
2.5.2. Calibration, Reference Data, and Interoperability
3. Calibration Status of Sentinel-2
3.1. Sensor Description
3.2. Radiometric Calibration
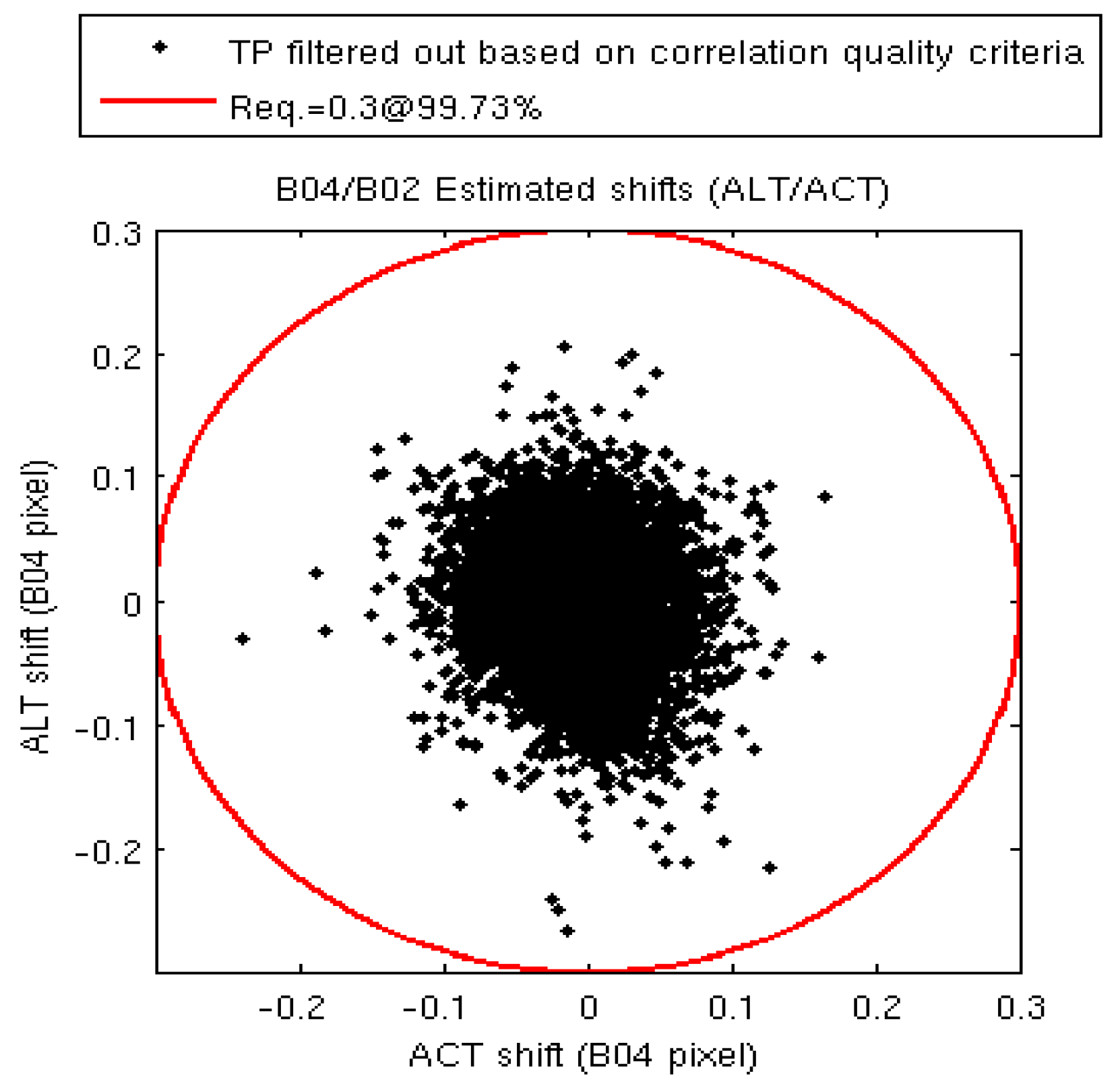
3.3. Geometric Calibration
- absolute geolocation performance better than 12.5 m (circular error at 95%);
- multi-temporal relative geolocation accuracy better 3 m (circular error at 95%);
- relative co-registration between any pair of spectral bands better than 0.3 pixel of the coarser spatial sampling distance (circular error at 99.7%).
- calibration of the relative viewing directions of each detector pixel;
- adjustment of on-board time lag;
- monitoring and adjustment of the spacecraft line-of-sight model;
- image geometric refinement using a global reference image.
4. Calibration Comparison of Landsat 8 and Sentinel 2
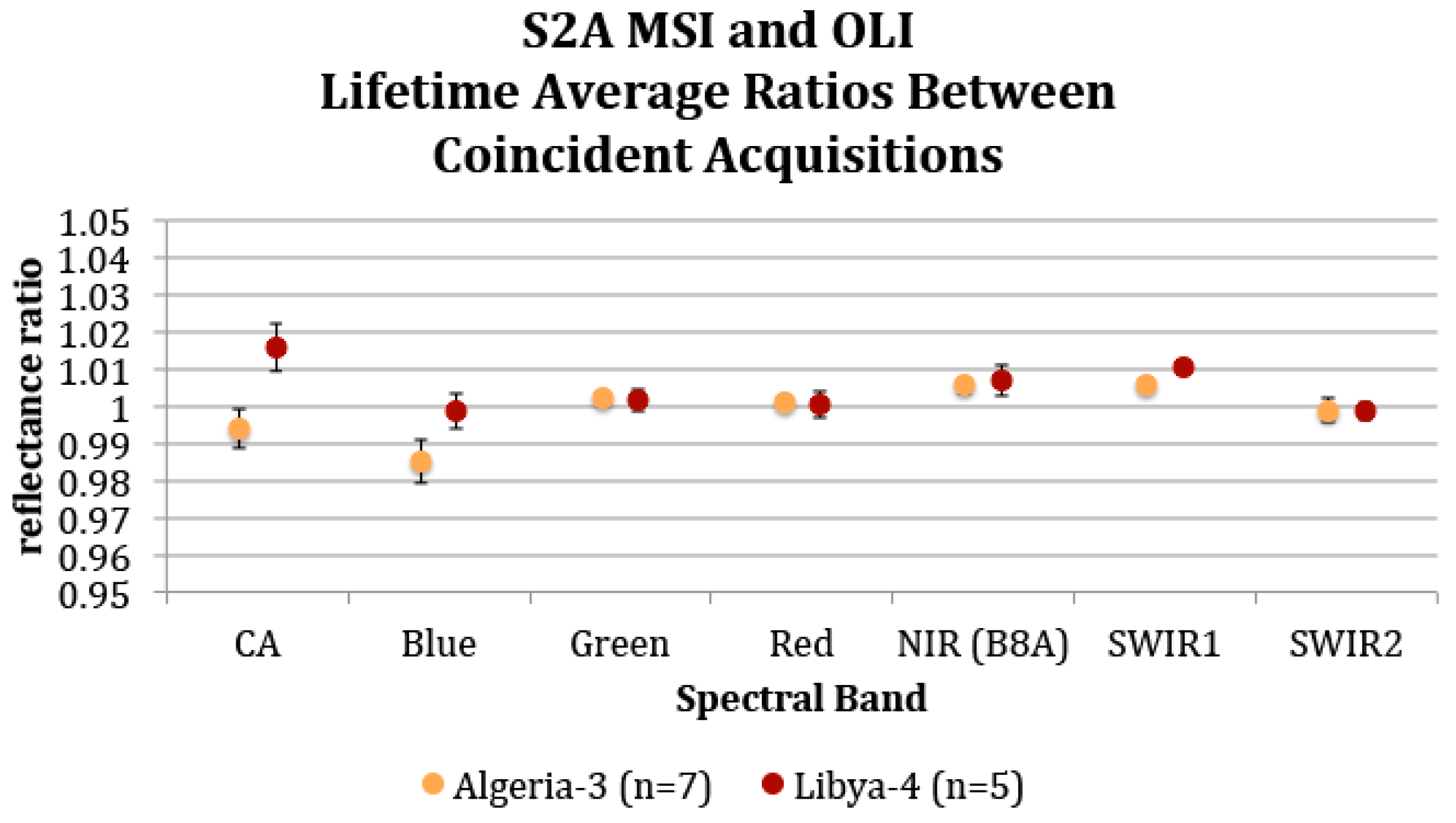
4.1. Calibration Comparison Using Coincident Acquisitions
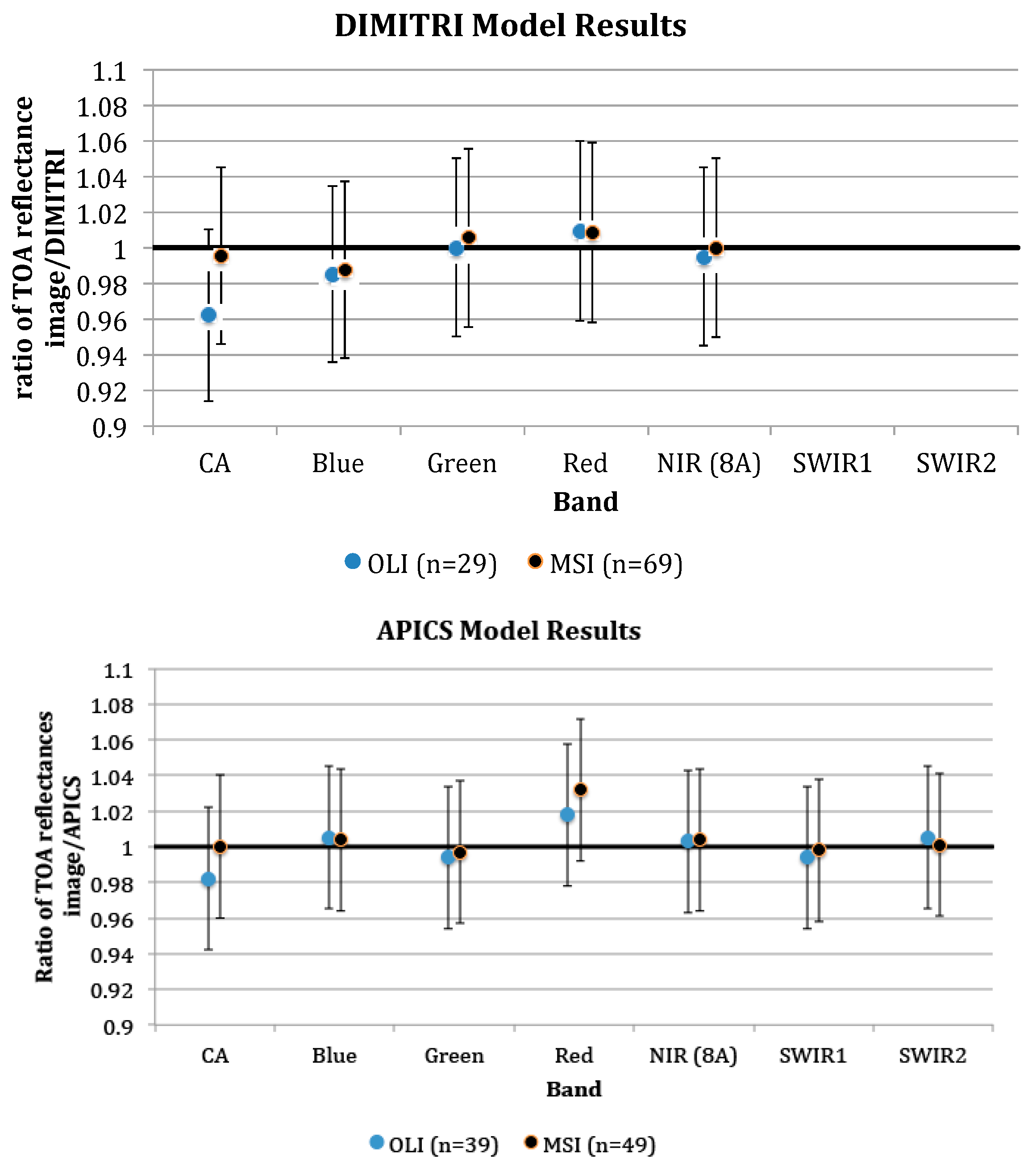
4.2. Pseudo Invariant Calibration Sites (PICS) Absolute Calibration Based on Hyperspectral Sensor Models
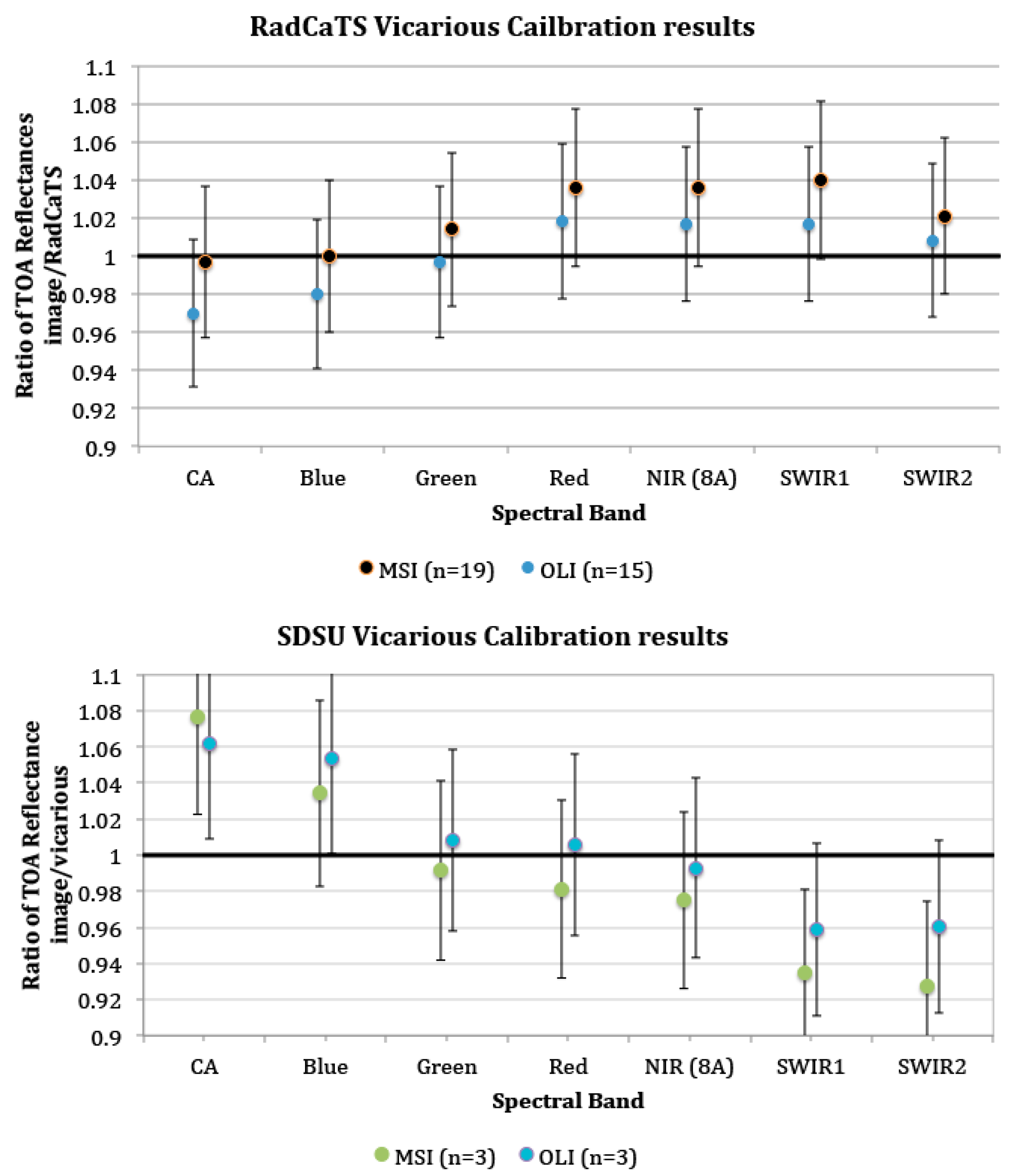
4.3. Vicarious Calibration Based on In Situ Surface Measurements
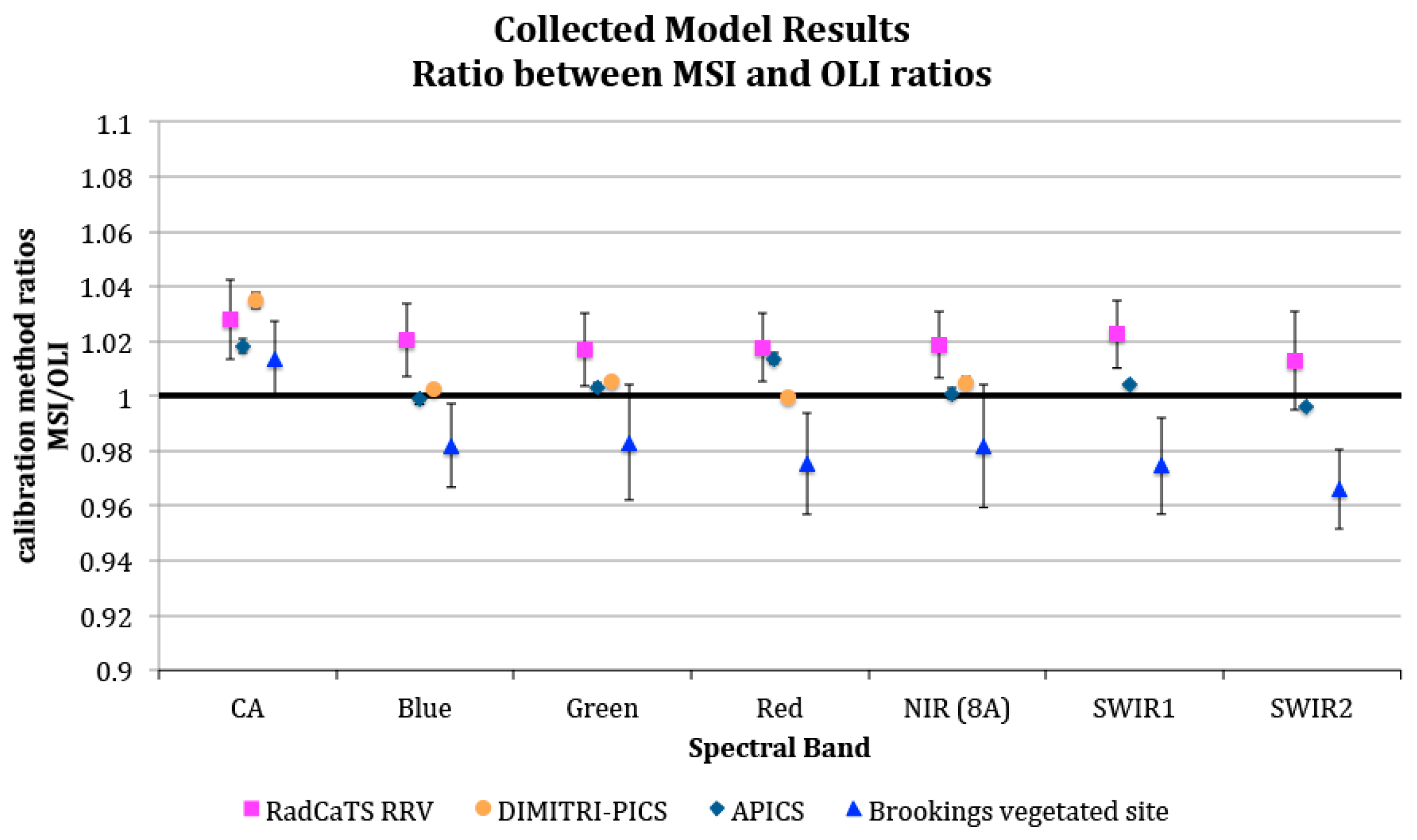
4.4. Summary of Results
5. Current Status and Limitations of Data Interoperability with Landsat and Sentinel
5.1. Harmonized Landsat/Sentinel-2 (HLS) Project
- Sensor misregistration: as noted above, Landsat 8 ground control differs from Sentinel-2. To minimize image-to-image variability when stacked as time series, HLS has implemented an approach whereby each Landsat image is co-registered to a “master” Sentinel-2a image using image cross-correlation techniques [30].
- Processing baselines: in 2017 USGS moved from the earlier L1T product to the “Collection 1” products, and announced plans to make analysis ready data (ARD) the default product by the launch of Landsat 9 in 2020. Similarly, ESA evolved the L1C baseline processing over several iterations during the early phases of the Sentinel-2 mission, including changes to the product filename and file structure. While welcome, these changes have made it difficult to standardize and synchronize the HLS processing. In addition, ESA has not yet implemented a “collection” model that includes archive-scale reprocessing.
5.2. Landsat-8 and Sentinel-2 Burned Area Mapping
5.3. Aquatic Applications: Potentials and Limitations
5.4. Data Interoperability for the International Community
- Continuity so that down-stream products can be developed with confidence that the data streams will continue, with smooth transitions as old instruments are retired and replaced with newer versions;
- Interoperability between data streams to allow reliable and high-quality products, as demonstrated in the NASA HLS Project; and
- That data are fit for use by specialists in agriculture, security, civil engineering, disaster management and so on, who may not be remote sensing scientists. These users will need data that are ‘ready to use’.
6. Recommendations
6.1. Improve Communications
6.2. Adopt Collection-Based Processing
6.3. Improve Calibration Methodologies
6.4. Develop Validation of Level 2 Products
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Markham, B.; Storey, J.; Morfitt, R. Landsat-8 sensor characterization and calibration. Remote Sens. 2015, 7, 2279–2282. [Google Scholar] [CrossRef]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A calibration and products validation status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef]
- Knight, E.; Kvaran, G. Landsat-8 Operational Land Imager design, characterization and performance. Remote Sens. 2014, 6, 10286–10305. [Google Scholar] [CrossRef]
- Barsi, J.; Lee, K.; Kvaran, G.; Markham, B.; Pedelty, J. The spectral response of the Landsat-8 Operational Land Imager. Remote Sens. 2014, 6, 10232–10251. [Google Scholar] [CrossRef]
- Markham, B.; Barsi, J.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 Operational Land Imager radiometric calibration and stability. Remote Sens. 2014, 6, 12275–12308. [Google Scholar] [CrossRef]
- Morfitt, R.; Barsi, J.; Levy, R.; Markham, B.; Micijevic, E.; Ong, L.; Scaramuzza, P.; Vanderwerff, K. Landsat-8 Operational Land Imager (OLI) radiometric performance on-orbit. Remote Sens. 2015, 7, 2208–2237. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Thome, K.; Biggar, S.; Helder, D.; Aaron, D.; Leigh, L.; Mishra, N. The ground-based absolute radiometric calibration of Landsat 8 OLI. Remote Sens. 2015, 7, 600–626. [Google Scholar] [CrossRef]
- Helder, D.L.; Markham, B.L.; Thome, K.J.; Barsi, J.A.; Chander, G.; Malla, R. Updated radiometric calibration for the Landsat-5 Thematic Mapper reflective bands. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3309–3325. [Google Scholar] [CrossRef]
- Czapla-Myers, J.S.; Leisso, N.P.; Anderson, N.J.; Biggar, S.F. On-orbit radiometric calibration of Earth-observing sensors using the Radiometric Calibration Test Site (RadCaTS). In Proceedings of the SPIE 8390, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XVIII, Baltimore, MD, USA, 24 May 2012; Shen, S.S., Lewis, P.E., Eds.; SPIE: Bellingham, WA, USA, 2012. [Google Scholar] [CrossRef]
- Storey, J.; Choate, M.; Lee, K. Landsat 8 Operational Land Imager on-orbit geometric calibration and performance. Remote Sens. 2014, 6, 11127–11152. [Google Scholar] [CrossRef]
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A note on the temporary misregistration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar] [CrossRef]
- Chorvalli, V.; Cazaubiel, V.; Bursch, S.; Welsch, M.; Sontag, H.; Martimort, P.; Del Bello, U.; Sy, O.; Laberinti, P.; Spoto, F. Design and development of the Sentinel-2 Multi Spectral Instrument and satellite system. In Proceedings of the SPIE 7826, Sensors, Systems, and Next-Generation Satellites XIV, Toulouse, France, 13 October 2010; Meynart, R., Neeck, S.P., Shimoda, H., Eds.; SPIE: Bellingham, WA, USA, 2010. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The Solar Spectral Irradiance from 200 to 2400 nm as Measured by the SOLSPEC Spectrometer from the Atlas and Eureca Missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Maisonobe, L.; Pommier, V.; Parraud, P. Orekit: An open-source library for operational flight dynamics applications. In Proceedings of the 4th International Conference on Astrodynamics Tools and Techniques: Astrodynamics Beyond Borders, 4th ICATT, Madrid, Spain, 3–6 May 2010; ESA: Paris, France, 2010. [Google Scholar]
- Alhammoud, B.; Bouvet, M.; Jackson, J.; Arias, M.; Thepaut, O.; Lafrance, B.; Gascon, F.; Cadau, E.; Berthelot, B.; Francesconi, B. On the vicarious calibration methodologies in DIMITRI: Applications on Sentinel-2 and Landsat-8 products and comparison with in-situ measurements. In ESA Special Publication SP-740, Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; Ouwehand, L., Ed.; ESA: Noordwijk, The Netherlands, 2016; p. 413. [Google Scholar]
- Bouvet, M. Radiometric comparison of multispectral imagers over a pseudo-invariant calibration site using a reference radiometric model. Remote Sens. Environ. 2014, 140, 141–154. [Google Scholar] [CrossRef]
- Thome, K.J. Absolute radiometric calibration of Landsat 7 ETM+ using the reflectance-based method. Remote Sens. Environ. 2001, 78, 27–38. [Google Scholar] [CrossRef]
- Markham, B.L.; Barker, J.L.; Kaita, E.; Barsi, J.A.; Helder, D.L.; Palluconi, F.D.; Schott, J.R.; Thome, K.J.; Morfitt, R.; Scaramuzza, P. Landsat-7 ETM+ radiometric calibration: Two years on-orbit. In Scanning the Present and Resolving the Future, Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Vol. VII, Sydney, NSW, Australia, 9–13 July 2001; IEEE: Piscataway, NJ, USA, 2001; pp. 518–520. [Google Scholar] [CrossRef]
- Mishra, N.; Helder, D.; Barsi, J.; Markham, B. Continuous calibration improvement in solar reflective bands: Landsat 5 through Landsat 8. Remote Sens. Environ. 2016, 185, 7–15. [Google Scholar] [CrossRef] [PubMed]
- Barsi, J.; Alhammoud, B.; Czapla-Myers, J.; Gascon, F.; Haque, M.H.; Maewmanee, M.; Leigh, L.; Markham, B. Sentinel-2A MSI and Landsat-8 OLI Radiometric Cross Comparison. Eur. J. Remote Sens. 2018, in press. [Google Scholar]
- Chander, G.; Mishra, N.; Helder, D.L.; Aaron, D.; Choi, T.; Angal, A.; Xiong, X. Use of EO-1 Hyperion data to calculate spectral band adjustment factors (SBAF) between the L7 ETM+ and Terra MODIS sensors. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1667–1670. [Google Scholar] [CrossRef]
- Lacherade, S.; Fougnie, B.; Henry, P.; Gamet, P. Cross calibration over desert sites: Description, methodology, and operational implementation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1098–1113. [Google Scholar] [CrossRef]
- Mishra, N.; Helder, D.; Angal, A.; Choi, J.; Xiong, X. Absolute calibration of optical satellite sensors using Libya 4 pseudo invariant calibration site. Remote Sens. 2014, 6, 1327–1346. [Google Scholar] [CrossRef]
- Anderson, N.; Czapla-Myers, J.; Leisso, N.; Biggar, S.; Burkhart, C.; Kingston, R.; Thome, K. Design and calibration of field deployable ground-viewing radiometers. Appl. Opt. 2013, 52, 231–240. [Google Scholar] [CrossRef] [PubMed]
- Thome, K.J.; Helder, D.L.; Aaron, D.; Dewald, J.D. Landsat-5 TM and Landsat-7 ETM+ absolute radiometric calibration using the reflectance-based method. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2777–2785. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- Roy, D.P.; Zhang, H.K.; Ju, J.; Gomez-Dans, J.L.; Lewis, P.E.; Schaaf, C.B.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L.; Huang, H.; Li, Z. Examination of Sentinel-2A multi-spectral instrument (MSI) reflectance anisotropy and the suitability of a general method to normalize MSI reflectance to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2017, 199, 25–38. [Google Scholar] [CrossRef]
- Franch, B.; Vermote, E.F.; Claverie, M. Intercomparison of Landsat albedo retrieval techniques and evaluation against in situ measurements across the US SURFRAD network. Remote Sens. Environ. 2014, 152, 627–637. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.G.; Wolfe, R.E. Automated registration and orthorectification package for Landsat and Landsat-like data processing. J. Appl. Remote Sens. 2009, 3, 033515. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Hall, D.K.; Ormsby, J.P.; Johnson, L.; Brown, J. Landsat digital analysis of the initial recovery of burned tundra at Kokolik River, Alaska. Remote Sens. Environ. 1980, 10, 263–272. [Google Scholar] [CrossRef]
- Arino, O.; Piccolini, E.; Kasischke, F.; Siegert, E.; Chuvieco, P.; Martin, Z.; Li, R.; Fraser, H.; Eva, H.; Stroppiana, D.; et al. Methods of mapping surfaces burned in vegetation fires. In Global and Regional Wildfire Monitoring from Space: Planning a Coordinated International Effort; Ahern, F.J., Goldammer, J., Justice, C., Eds.; SPB Academic Publishing: The Hague, The Netherlands, 2001; pp. 227–255. ISBN 9789051031409. [Google Scholar]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Boschetti, L.; Stehman, S.V.; Roy, D.P. A stratified random sampling design in space and time for regional to global scale burned area product validation. Remote Sens. Environ. 2016, 186, 465–478. [Google Scholar] [CrossRef]
- Mouillot, F.; Schultz, M.G.; Yue, C.; Cadule, P.; Tansey, K.; Ciais, P.; Chuvieco, E. Ten years of global burned area products from spaceborne remote sensing—A review: Analysis of user needs and recommendations for future developments. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 64–79. [Google Scholar] [CrossRef]
- Roy, D.P.; Boschetti, L.; Justice, C.O.; Ju, J. The collection 5 MODIS burned area product—Global evaluation by comparison with the MODIS active fire product. Remote Sens. Environ. 2008, 112, 3690–3707. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Huang, H.; Roy, D.; Boschetti, L.; Zhang, H.; Yan, L.; Kumar, S.; Gomez-Dans, J.; Li, J. Separability analysis of Sentinel-2A Multi-Spectral Instrument (MSI) data for burned area discrimination. Remote Sens. 2016, 8, 873. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A global analysis of Sentinel-2A, Sentinel-2B and Landsat-8 data revisit intervals and implications for terrestrial monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L. Best practices for the reprojection and resampling of Sentinel-2 Multi Spectral Instrument Level 1C data. Remote Sens. Lett. 2016, 7, 1023–1032. [Google Scholar] [CrossRef]
- Wolfe, R.E.; Roy, D.P.; Vermote, E. MODIS land data storage, gridding, and compositing methodology: Level 2 grid. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1324–1338. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P. Using the 500 m MODIS land cover product to derive a consistent continental scale 30 m Landsat land cover classification. Remote Sens. Environ. 2017, 197, 15–34. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.; Zhang, H.; Li, J.; Huang, H. An automated approach for sub-pixel registration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sens. 2016, 8, 520. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.P.; Li, Z.; Zhang, H.K.; Huang, H. Sentinel-2A multi-temporal misregistration characterization and an orbit-based sub-pixel registration methodology. Remote Sens. Environ. 2018, 215, 495–506. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, H.K.; Roy, D.P.; Yan, L.; Huang, H.; Li, J. Landsat 15-m Panchromatic-Assisted Downscaling (LPAD) of the 30-m reflective wavelength bands to Sentinel-2 20-m resolution. Remote Sens. 2017, 9, 755. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Müller-Wilm, U. S2 MPC: Sen2Cor Configuration and User Manual; Ref. S2-PDGS-MPC-L2A-SUM-V2.3; ESA: Darmstadt, Germany, 2016; Available online: http://step.esa.int/thirdparties/sen2cor/2.3.0/[L2A-SUM]%20S2-PDGS-MPC-L2A-SUM%20[2.3.0].pdf (accessed on 4 November 2017).
- Roy, D.P.; Lewis, P.E.; Justice, C.O. Burned area mapping using multi-temporal moderate spatial resolution data—A bi-directional reflectance model-based expectation approach. Remote Sens. Environ. 2002, 83, 263–286. [Google Scholar] [CrossRef]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P.; Yan, L.; Li, Z.; Huang, H.; Vermote, E.; Skakun, S.; Roger, J.-C. Characterization of Sentinel-2A and Landsat-8 top of atmosphere, surface, and nadir BRDF adjusted reflectance and NDVI differences. Remote Sens. Environ. 2018, 215, 482–494. [Google Scholar] [CrossRef]
- Gerace, A.D.; Schott, J.R.; Nevins, R. Increased potential to monitor water quality in the near-shore environment with Landsat’s next-generation satellite. J. Appl. Remote Sens. 2013, 7, 073558. [Google Scholar] [CrossRef]
- Hedley, J.; Roelfsema, C.; Koetz, B.; Phinn, S. Capability of the Sentinel 2 mission for tropical coral reef mapping and coral bleaching detection. Remote Sens. Environ. 2012, 120, 145–155. [Google Scholar] [CrossRef]
- Pahlevan, N.; Schott, J.R. Leveraging EO-1 to evaluate capability of new generation of Landsat sensors for coastal/inland water studies. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 360–374. [Google Scholar] [CrossRef]
- Mobley, C.D.; Werdell, J.; Franz, B.; Ahmad, Z.; Bailey, S. Atmospheric Correction for Satellite Ocean Color. Radiometry; Technical Report, GSFC-E-DAA-TN35509, NASA/TM-2016-217551; NASA: Greenbelt, MD, USA, 2016. Available online: https://ntrs.nasa.gov/search.jsp?R=20160011399 (accessed on 1 December 2017).
- Gordon, H.R. Atmospheric correction of ocean color imagery in the Earth Observing System era. J. Geophys. Res. 1997, 102, 17081–17106. [Google Scholar] [CrossRef]
- IOCCG. Mission Requirements for Future Ocean-Colour Sensors; McClain, C.R., Meister, G., Eds.; Reports of the International Ocean-Colour Coordinating Group, no. 13; IOCCG: Dartmouth, NS, Canada, 2012; Available online: http://ioccg.org/wp-content/uploads/2015/10/ioccg-report-13.pdf (accessed on 1 December 2017).
- Hu, C.; Lee, Z.; Franz, B. Chlorophyll a algorithms for oligotrophic oceans: A novel approach based on three-band reflectance difference. J. Geophys. Res. 2012, 117, C01011. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Maritorena, S.; Siegel, D.A.; O’Brien, M.C.; Toole, D.; Mitchell, B.G.; Kahru, M.; Chavez, F.P.; Strutton, P.; Cota, G.F.; et al. Ocean Color Chlorophyll a Algorithms for SeaWiFS, OC2, and OC4: Version 4; Hooker, S.B., Firestone, E.R., Eds.; SeaWiFS Postlaunch Calibration and Validation Analyses, Part 3, NASA Tech. Memo. 2000-206892; NASA: Washington, DC, USA, 2000; pp. 9–23. Available online: https://oceancolor.gsfc.nasa.gov/docs/technical/seawifs_reports/postlaunch/post_vol11_abs/ (accessed on 2 December 2017).
- Franz, B.A.; Bailey, S.W.; Werdell, P.J.; McClain, C.R. Sensor-independent approach to the vicarious calibration of satellite ocean color radiometry. Appl. Opt. 2007, 46, 5068–5082. [Google Scholar] [CrossRef] [PubMed]
- Pahlevan, N.; Schott, J.R.; Franz, B.A.; Zibordi, G.; Markham, B.; Bailey, S.; Schaaf, C.B.; Ondrusek, M.; Greb, S.; Strait, C.M. Landsat 8 remote sensing reflectance (Rrs) products: Evaluations, intercomparisons, and enhancements. Remote Sens. Environ. 2017, 190, 289–301. [Google Scholar] [CrossRef]
- Pahlevan, N.; Sarkar, S.; Franz, B.A.; Balasubramanian, S.V.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Pahlevan, N.; Lee, Z.; Wei, J.; Schaaf, C.B.; Schott, J.R.; Berk, A. On-orbit radiometric characterization of OLI (Landsat-8) for applications in aquatic remote sensing. Remote Sens. Environ. 2014, 154, 272–284. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Li, F.; Jupp, D.L.B.; Thankappan, M.; Lymburner, L.; Mueller, N.; Lewis, A.; Held, A. A physics-based atmospheric and BRDF correction for Landsat data over mountainous terrain. Remote Sens. Environ. 2012, 124, 756–770. [Google Scholar] [CrossRef]
- European Space Agency. User Guides, Sentinel-2 MSI, Level-2; ESA: Paris, France, 2018; Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-2-msi/processing-levels/level-2 (accessed on 12 January 2018).
- United States Geological Survey. Landsat 8 Surface Reflectance Code (LASRC) Product Guide; LSDS-1574, Version 2.0; USGS: Reston, VA, USA, 2017. Available online: https://landsat.usgs.gov/sites/default/files/documents/lasrc_product_guide.pdf (accessed on 12 January 2018).
- Collison, A.; Wilson, N. Planet. Surface Reflectance Product; Planet Labs, Inc.: San Francisco, CA, USA, 2017; Available online: https://assets.planet.com/marketing/PDF/Planet_Surface_Reflectance_Technical_White_Paper.pdf (accessed on 12 January 2018).
- Kirches, G.; Wevers, J.; Arino, O.; Boettcher, M.; Bontemps, S.; Brockmann, C.; Defourny, P.; Danne, O.; Fincke, T.; Lamarche, C.; et al. Sentinel-2 cloud free surface reflectance composites for Land Cover Climate Change Initiative’s long-term data record extension. In Proceedings of the ESA Worldcover 2017 Conference, Frascati, Rome, Italy, 14–16 March 2017; Available online: http://worldcover2017.esa.int/conftool/default_107.html#paperID143 (accessed on 1 November 2017).
- Giuliani, G.; Chatenoux, B.; De Bono, A.; Rodila, D.; Richard, J.-P.; Allenbach, K.; Dao, H.; Peduzzi, P. Building an Earth Observations Data Cube:Lessons learned from the Swiss Data Cube (SDC) on generating Analysis Ready Data (ARD). Big Earth Data 2017, 1, 100–117. [Google Scholar] [CrossRef]
- Lewis, A.; Oliver, S.; Lymburner, L.; Evans, B.; Wyborn, L.; Mueller, N.; Raevksi, G.; Hooke, J.; Woodcock, R.; Sixsmith, J.; et al. The Australian Geoscience Data Cube—Foundations and lessons learned. Remote Sens. Environ. 2017, 202, 276–292. [Google Scholar] [CrossRef]
- Kotchenova, S.Y.; Vermote, E.F.; Levy, R.; Lyapustin, A. Radiative transfer codes for atmospheric correction and aerosol retrieval: Intercomparison study. Appl. Opt. 2008, 47, 2215–2226. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Panel Member | Affiliation | Expertise |
|---|---|---|
| Brian Markham | NASA | Landsat Prelaunch Radiometric Calibration |
| Ron Morfitt | USGS EROS | Landsat On-Orbit Radiometric Calibration |
| Jim Storey | SGT/USGS EROS | Landsat Geometric Calibration |
| Sebastien Clerc | ACRI/ESA | Sentinel 2 Geometric Calibration |
| Ferran Gascon | ESA | Sentinel 2 Quality Assurance |
| Bruno LaFrance | CS-SI/ESA | Sentinel 2 Radiometric Calibration |
| Adam Lewis | Geoscience Australia | International Data Quality Requirements |
| Jeff Masek | NASA | Harmonized Landsat and Sentinel Data |
| Nima Pahlevan | SSAI/NASA GSFC | Water applications of Landsat and Sentinel 2 |
| David Roy | SDSU | Burned Area Mapping |
| Wavelength Range | Band Number | Center Wavelength (Average Measured) (nm) | Bandwidth (Average Measured) (nm) | IFOV (Nominal) (m) | SNR @ MSI Ref Radiance (Average Measured) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| OLI | MSI | OLI | MSI | OLI | MSI | OLI | MSI | OLI | MSI | |
| Deep Blue | 1 | 1 | 443 | 443 | 16 | 20 | 30 | 60 | 500 | 1365 |
| Blue | 2 | 2 | 482 | 492 | 60 | 65 | 30 | 10 | 880 | 211 |
| Green | 3 | 3 | 561 | 560 | 57 | 35 | 30 | 10 | 940 | 239 |
| Red | 4 | 4 | 655 | 664 | 37 | 30 | 30 | 10 | 780 | 222 |
| Red Edge | 5 | 704 | 14 | 20 | 247 | |||||
| Red Edge | 6 | 740 | 14 | 20 | 216 | |||||
| Red Edge | 7 | 783 | 19 | 20 | 224 | |||||
| NIR | (5) * | 8 | (865) | 835 | (28) | 105 | (30) | 10 | (540) | 217 |
| NIR | 5 | 8a | 865 | 865 | 28 | 20 | 30 | 20 | 540 | 158 |
| Water Vapor | 9 | 945 | 19 | 60 | 223 | |||||
| Cirrus | 9 | 10 | 1373 | 1374 | 20 | 30 | 30 | 60 | 160 | 390 |
| SWIR-1 | 6 | 11 | 1609 | 1613 | 85 | 90 | 30 | 20 | 260 | 159 |
| SWIR-2 | 7 | 12 | 2201 | 2200 | 187 | 174 | 30 | 20 | 330 | 167 |
| Pan | 8 | 590 | 172 | 15 | ||||||
| Term | Uncertainty (1σ) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| CA | Blue | Green | Red | NIR | SWIR1 | SWIR 2 | Pan | Cirrus | |
| Initial Diffuser BRDF | 1.4% | 1.3% | 1.1% | 1.0% | 1.0% | 1.7% | 1.4% | 1.1% | 1.7% |
| Diffuser Geometry | 0.9% | 0.9% | 0.9% | 0.9% | 0.9% | 0.9% | 0.9% | 0.9% | 0.9% |
| Diffuser Stray Light | 0.7% | 0.7% | 0.7% | 0.7% | 0.7% | 0.7% | 0.7% | 0.7% | 0.7% |
| Pristine, Wkg Non-Linearity | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Wkg, Scene Non-Linearity | 1.0% | 1.0% | 1.0% | 1.0% | 1.0% | 1.0% | 1.0% | 1.0% | 1.0% |
| FFOV Non-Uniformity | 0.3% | 0.2% | 0.3% | 0.3% | 0.3% | 0.3% | 0.4% | 0.3% | 0.3% |
| Long Term Stability | 0.1% | 0.1% | 0.1% | 0.0% | 0.0% | 0.3% | 0.2% | 0.1% | 0.6% |
| Total | 2.1% | 1.9% | 1.7% | 1.7% | 1.7% | 2.2% | 2.0% | 1.7% | 2.3% |
| Operation | Parameter | Purpose | Frequency |
|---|---|---|---|
| OLI Sensor Alignment | OLI to attitude control system alignment matrix | Estimate OLI orientation relative to attitude control system to improve absolute pointing knowledge/geolocation. | During commissioning. Update quarterly as needed. |
| OLI Focal Plane Alignment | Pan band sensor chip lines-of-sight | Estimate corrections to pan band line-of-sight model for each sensor chip assembly to improve internal alignment of sensor modules. | During commissioning. Monitor and update if needed. |
| OLI Band Alignment | MS band sensor chip lines-of-sight | Estimate corrections to MS band line-of-sight models to improve band-to-band alignment, holding pan band fixed. | During commissioning. Monitor and update if needed. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Helder, D.; Markham, B.; Morfitt, R.; Storey, J.; Barsi, J.; Gascon, F.; Clerc, S.; LaFrance, B.; Masek, J.; Roy, D.P.; et al. Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability. Remote Sens. 2018, 10, 1340. https://doi.org/10.3390/rs10091340
Helder D, Markham B, Morfitt R, Storey J, Barsi J, Gascon F, Clerc S, LaFrance B, Masek J, Roy DP, et al. Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability. Remote Sensing. 2018; 10(9):1340. https://doi.org/10.3390/rs10091340
Chicago/Turabian StyleHelder, Dennis, Brian Markham, Ron Morfitt, Jim Storey, Julia Barsi, Ferran Gascon, Sebastien Clerc, Bruno LaFrance, Jeff Masek, David P. Roy, and et al. 2018. "Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability" Remote Sensing 10, no. 9: 1340. https://doi.org/10.3390/rs10091340
APA StyleHelder, D., Markham, B., Morfitt, R., Storey, J., Barsi, J., Gascon, F., Clerc, S., LaFrance, B., Masek, J., Roy, D. P., Lewis, A., & Pahlevan, N. (2018). Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability. Remote Sensing, 10(9), 1340. https://doi.org/10.3390/rs10091340