Comparison of Vegetation Indices Derived from UAV Data for Differentiation of Tillage Effects in Agriculture

 , ,
, ,
Abstract
:
1. Introduction
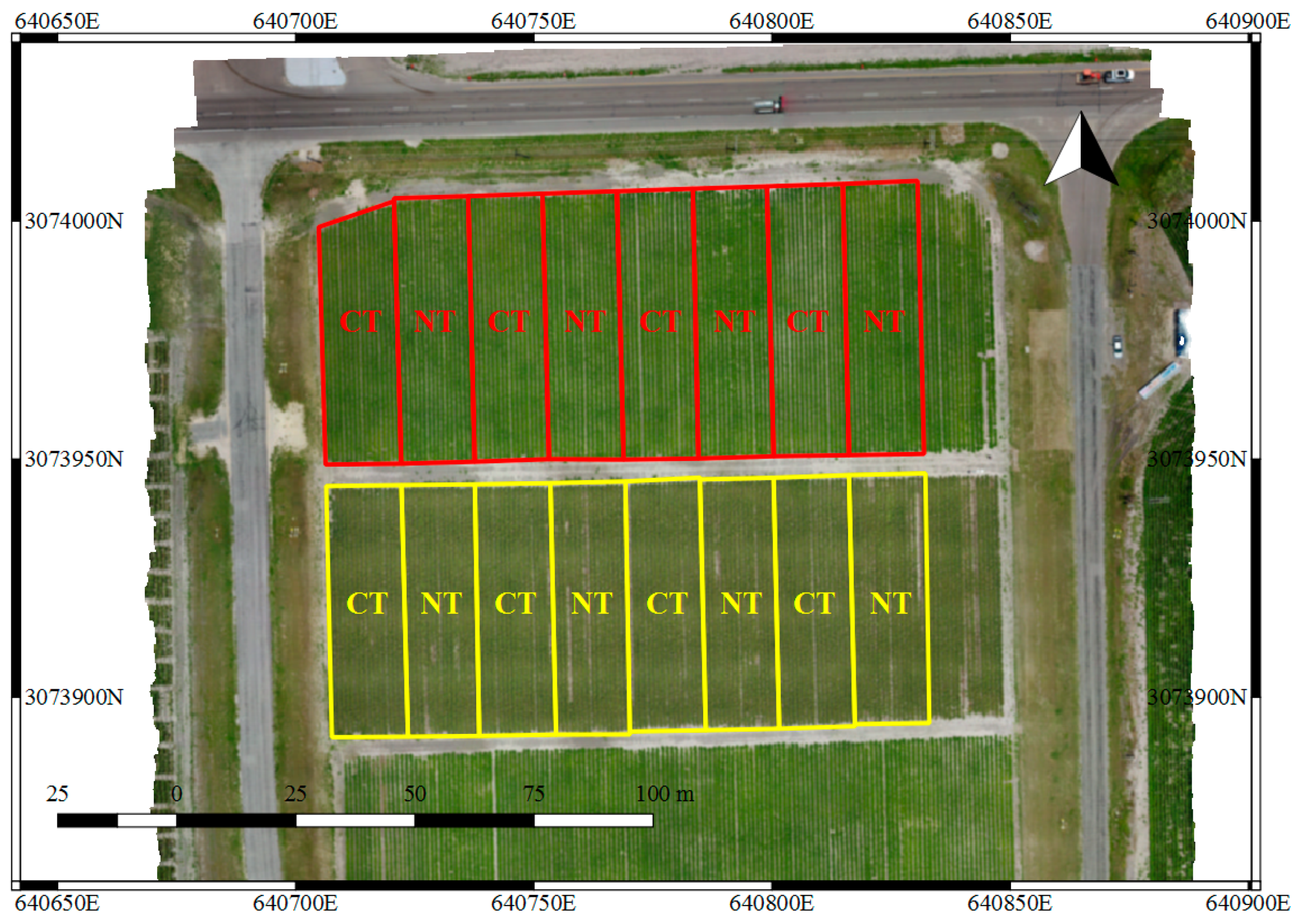
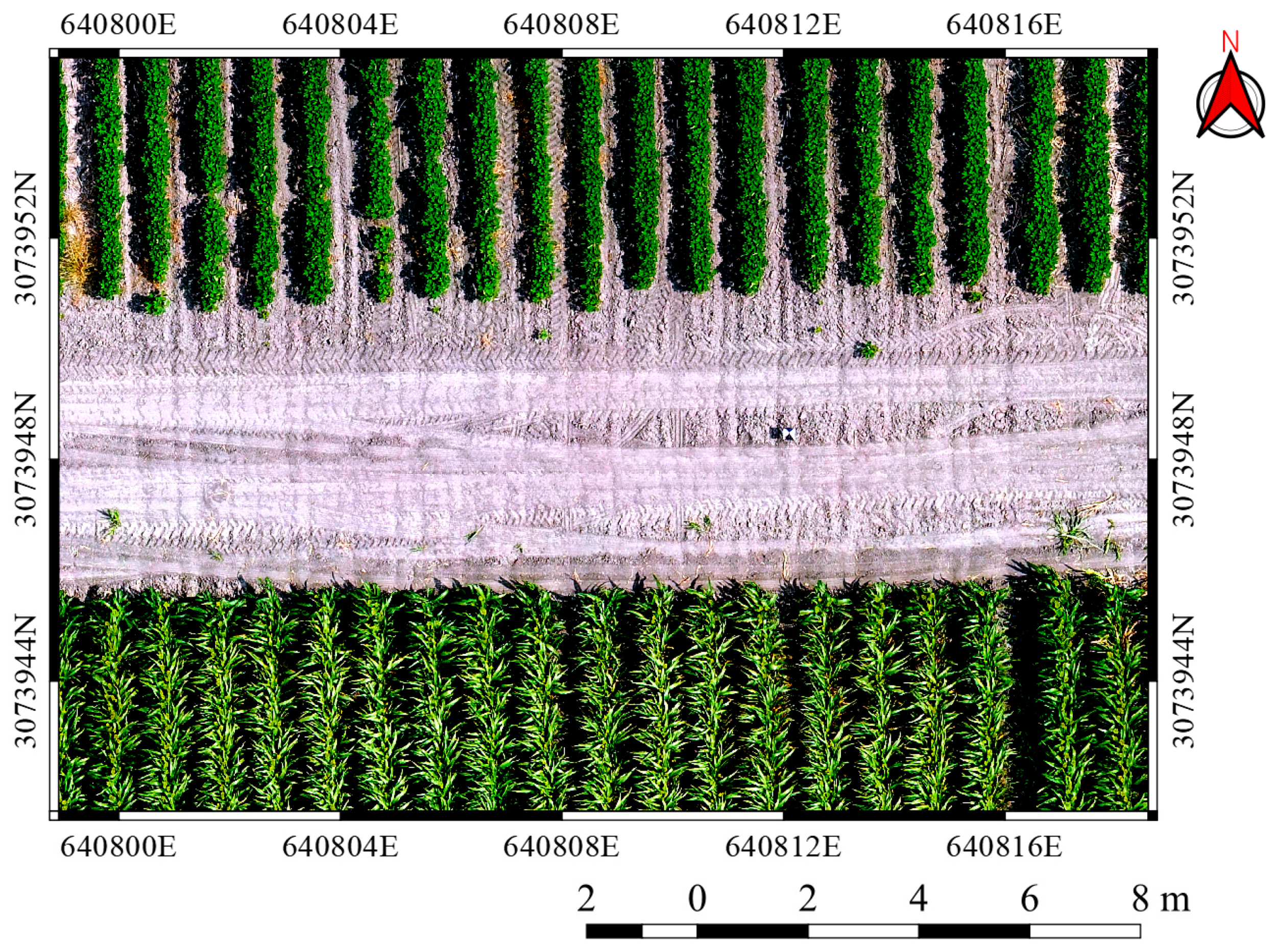
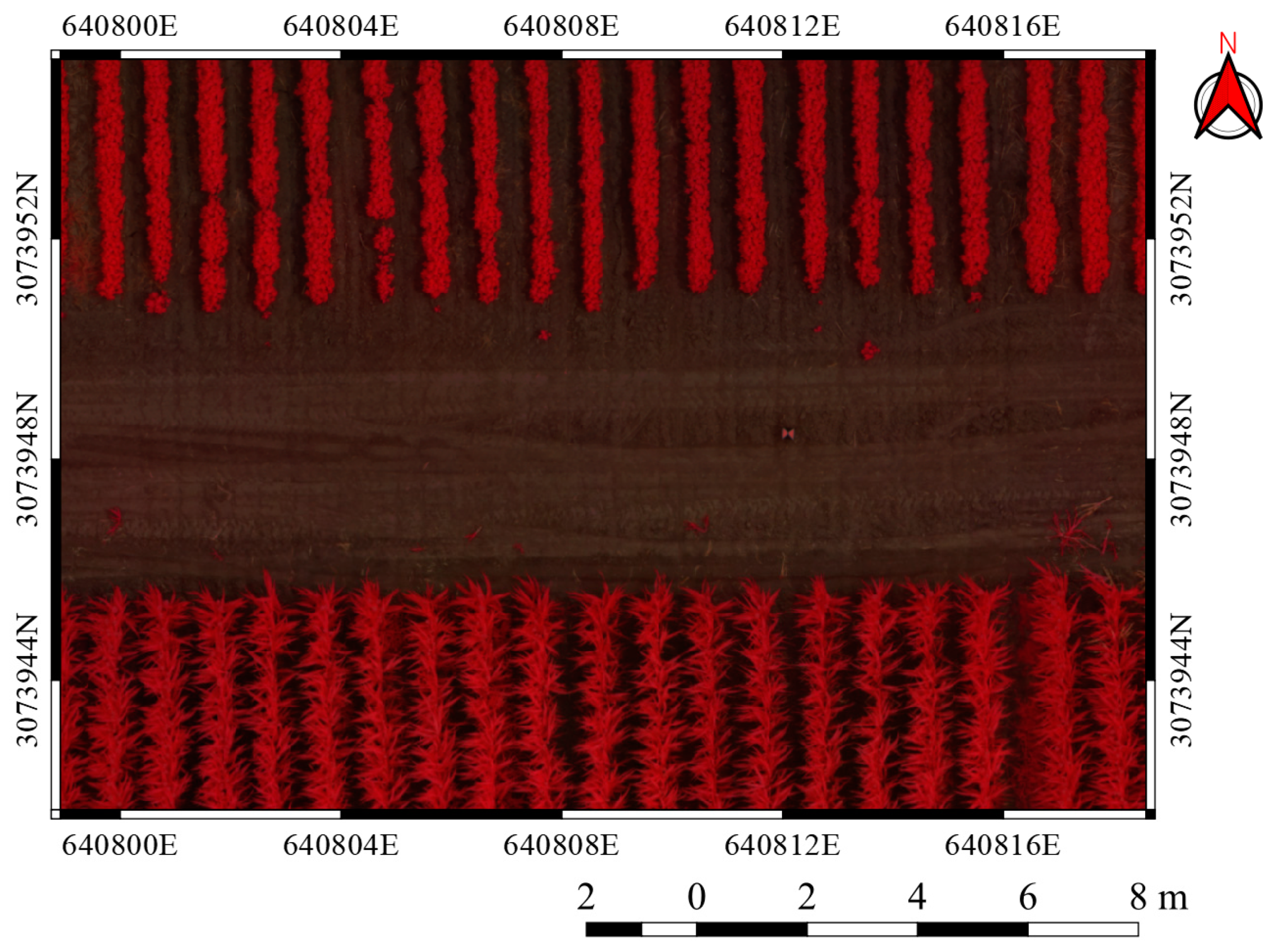
2. Study Area and Data
3. Methods
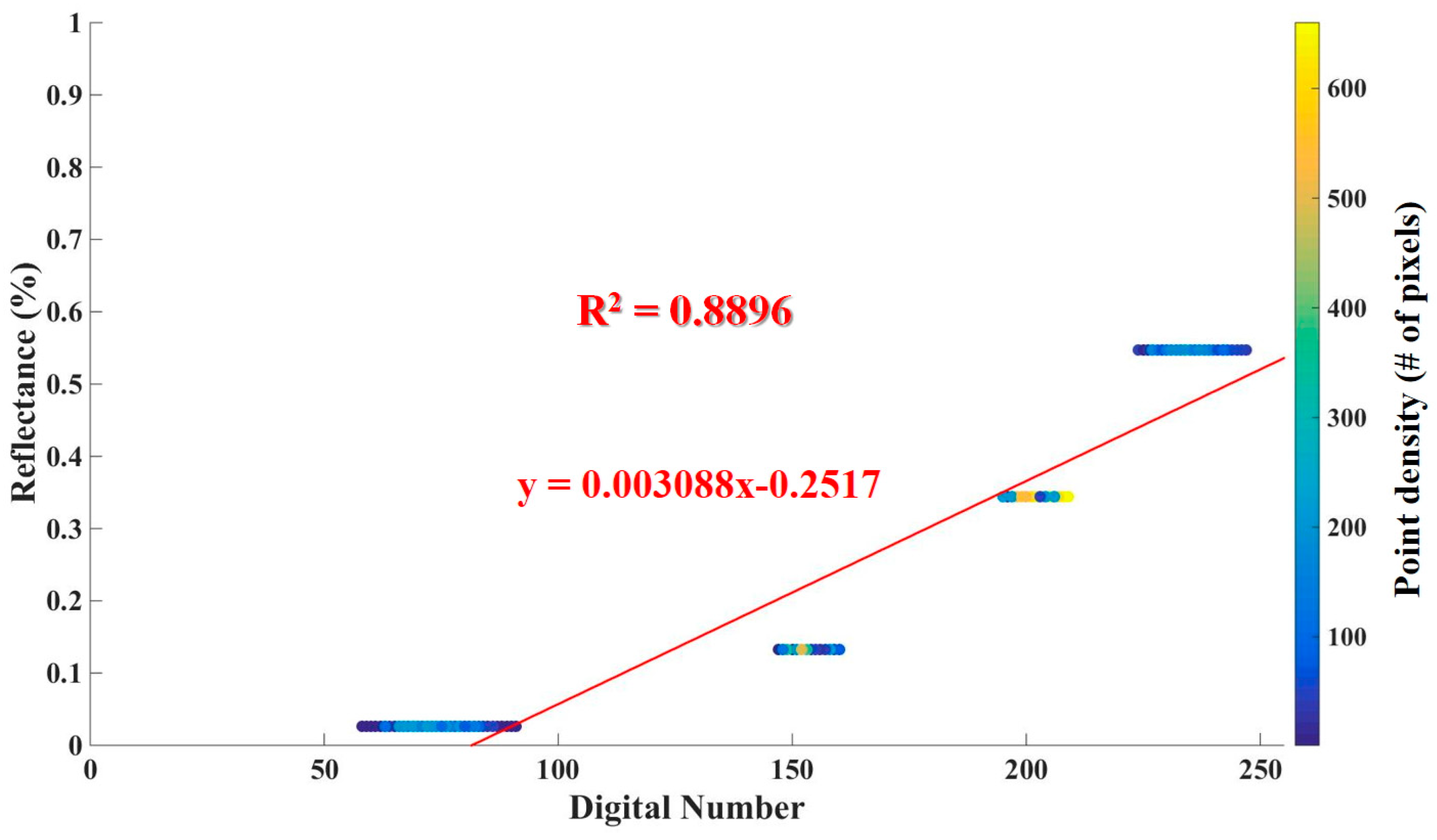
3.1. Radiometric Calibration
3.2. RGB and NIR VIs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name | Equation | Reference |
|---|---|---|---|
| RGB | GRVI (green red vegetation index) | [36] | |
| MGRVI (modified green red vegetation index) | [33] | ||
| RGBVI (red green blue vegetation index) | [33] | ||
| ExG (excess green) | 2 | [37] | |
| ExGR (excess green minus excess red) | [38] | ||
| NIR | NDVI (normalized difference vegetation index) | [39] | |
| NDRE (normalized difference red edge index) | [40] | ||
| GNDVI (green normalized difference vegetation index) | [41] | ||
| SAVI (soil adjusted vegetation index) | [42] | ||
| OSAVI (optimized soil adjusted vegetation index) | [43] | ||
| MSAVI (modified soil adjusted vegetation index) | [44] | ||
| GCI (green chlorophyll index) | [41] | ||
| RECI (red edge chlorophyll index) | [41] |
3.3. Time Series Difference Analysis and Z-Test
4. Results and Discussion
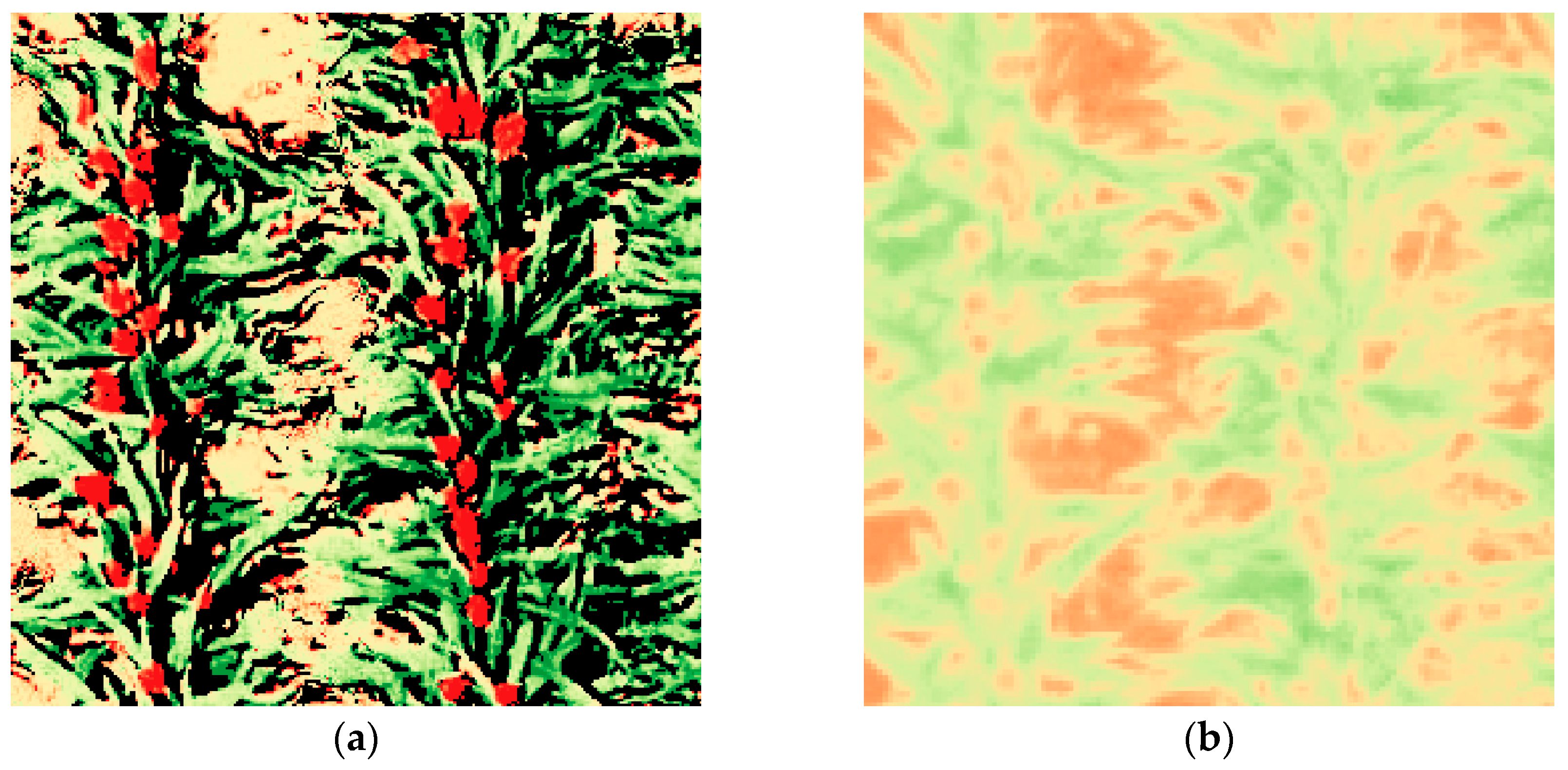
4.1. Radiometric Calibration
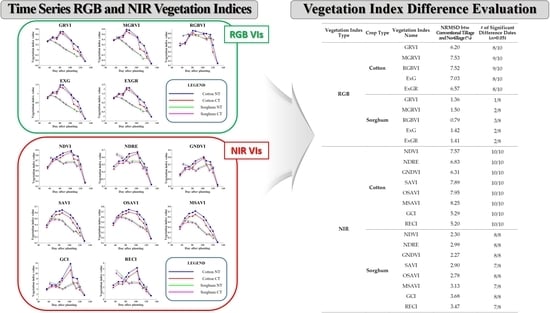
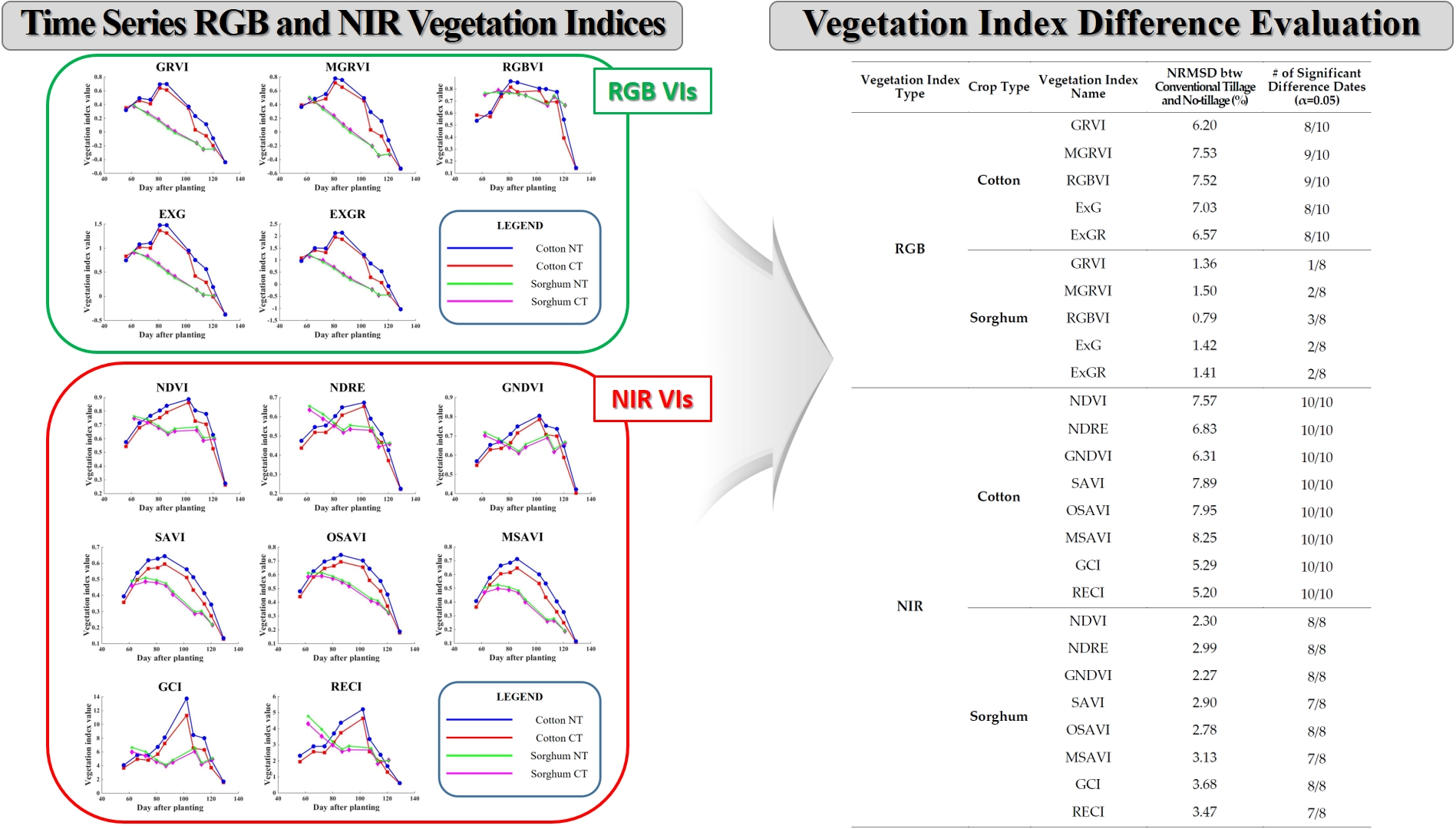
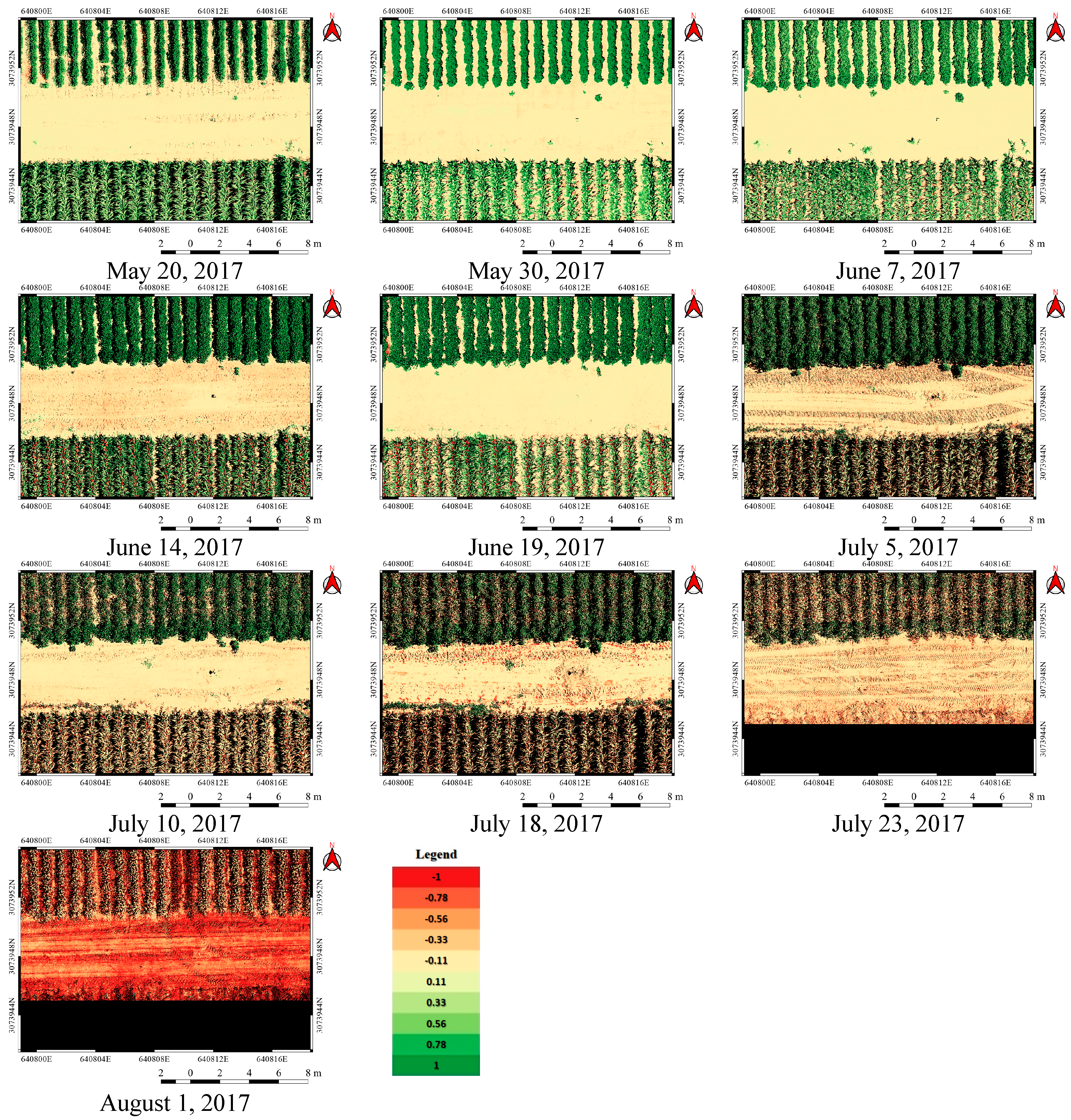
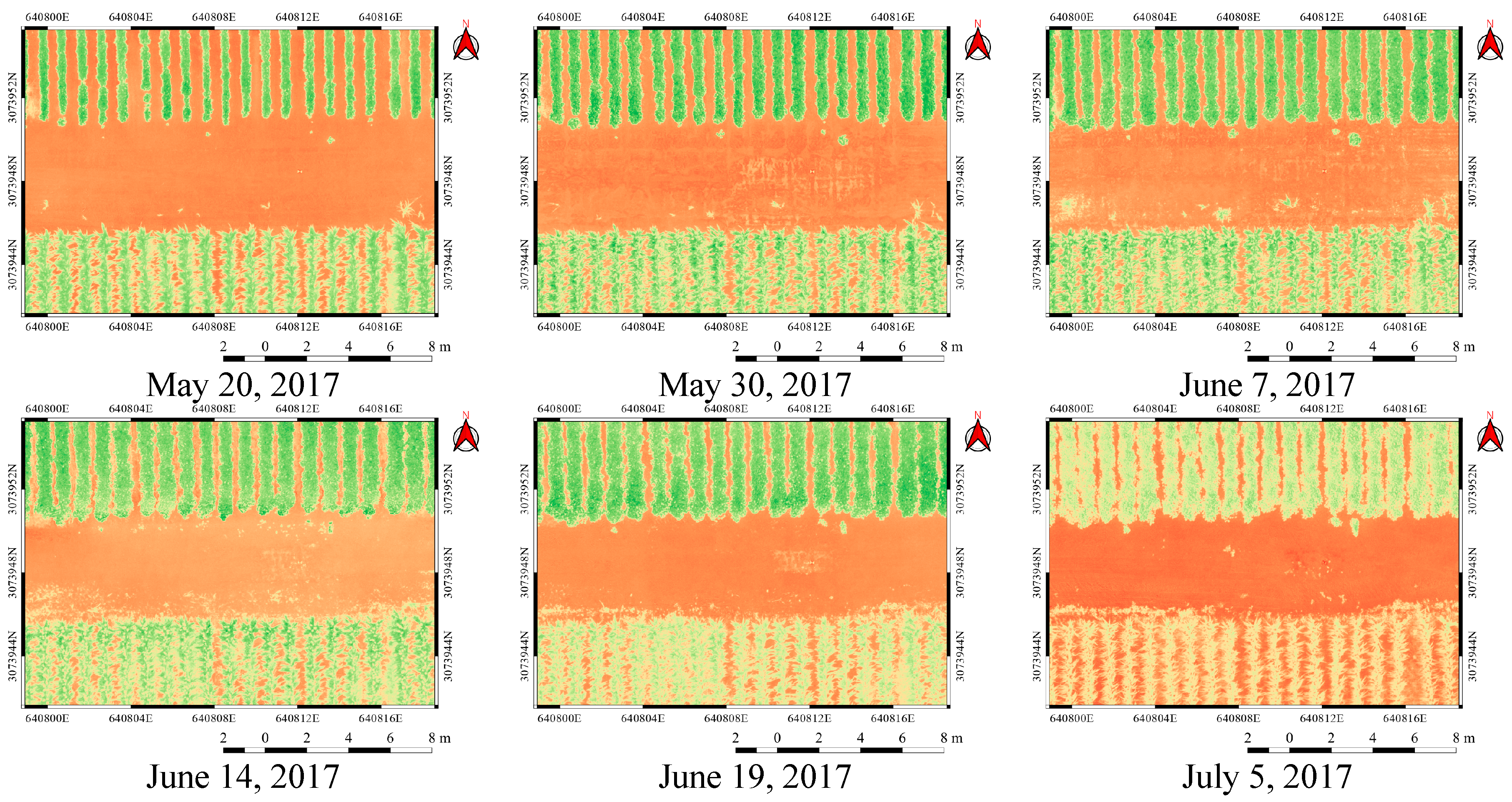
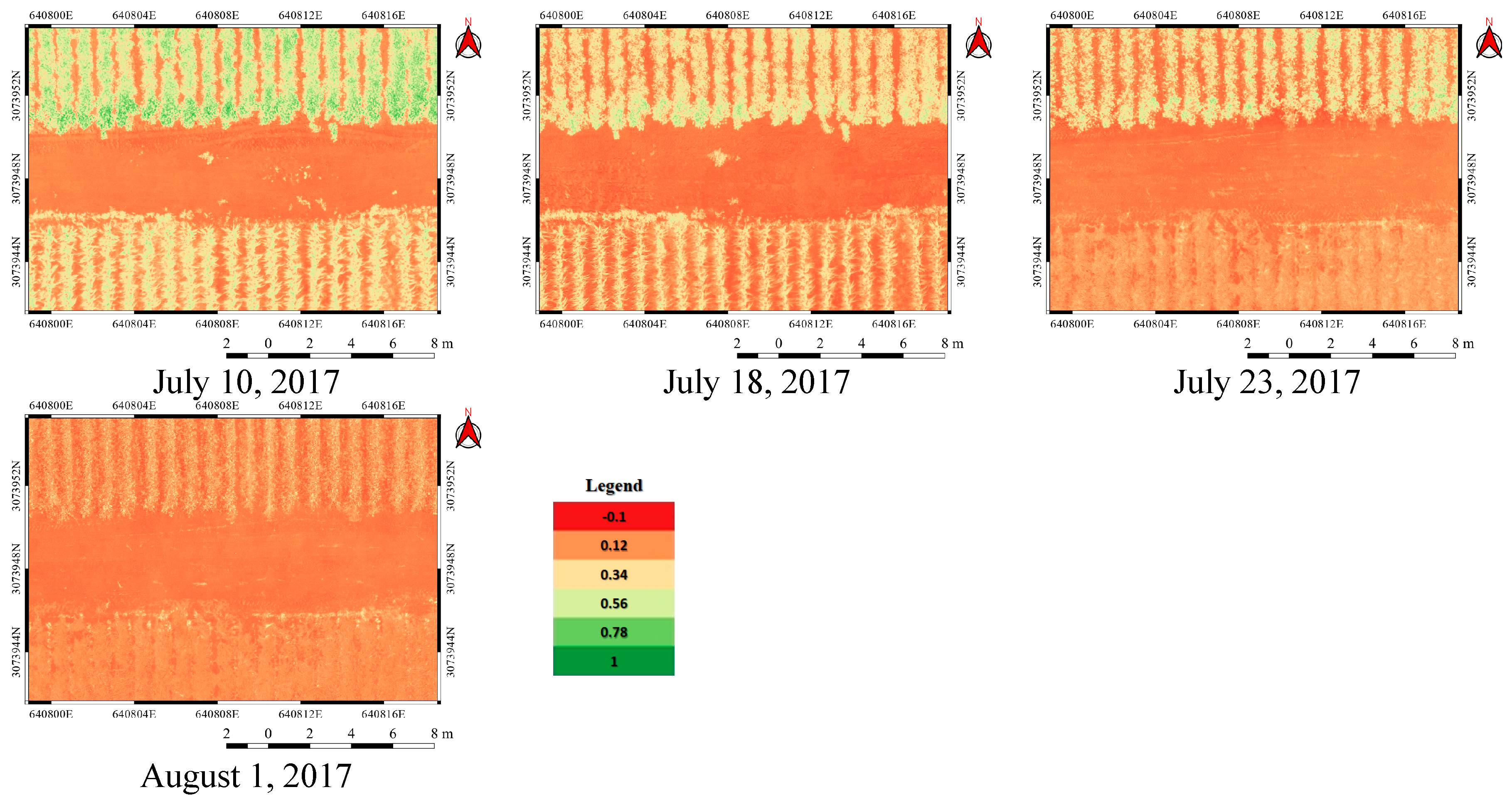
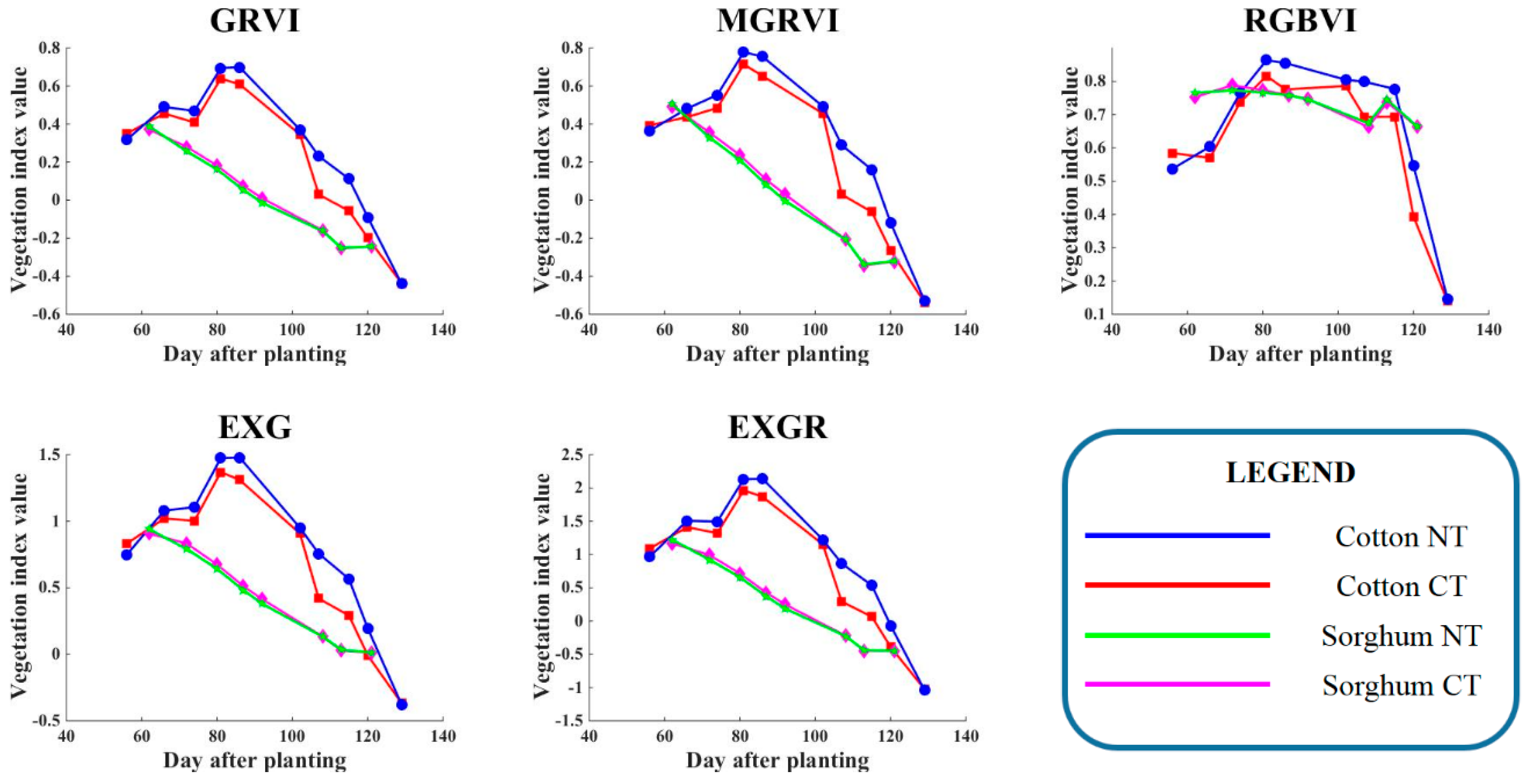
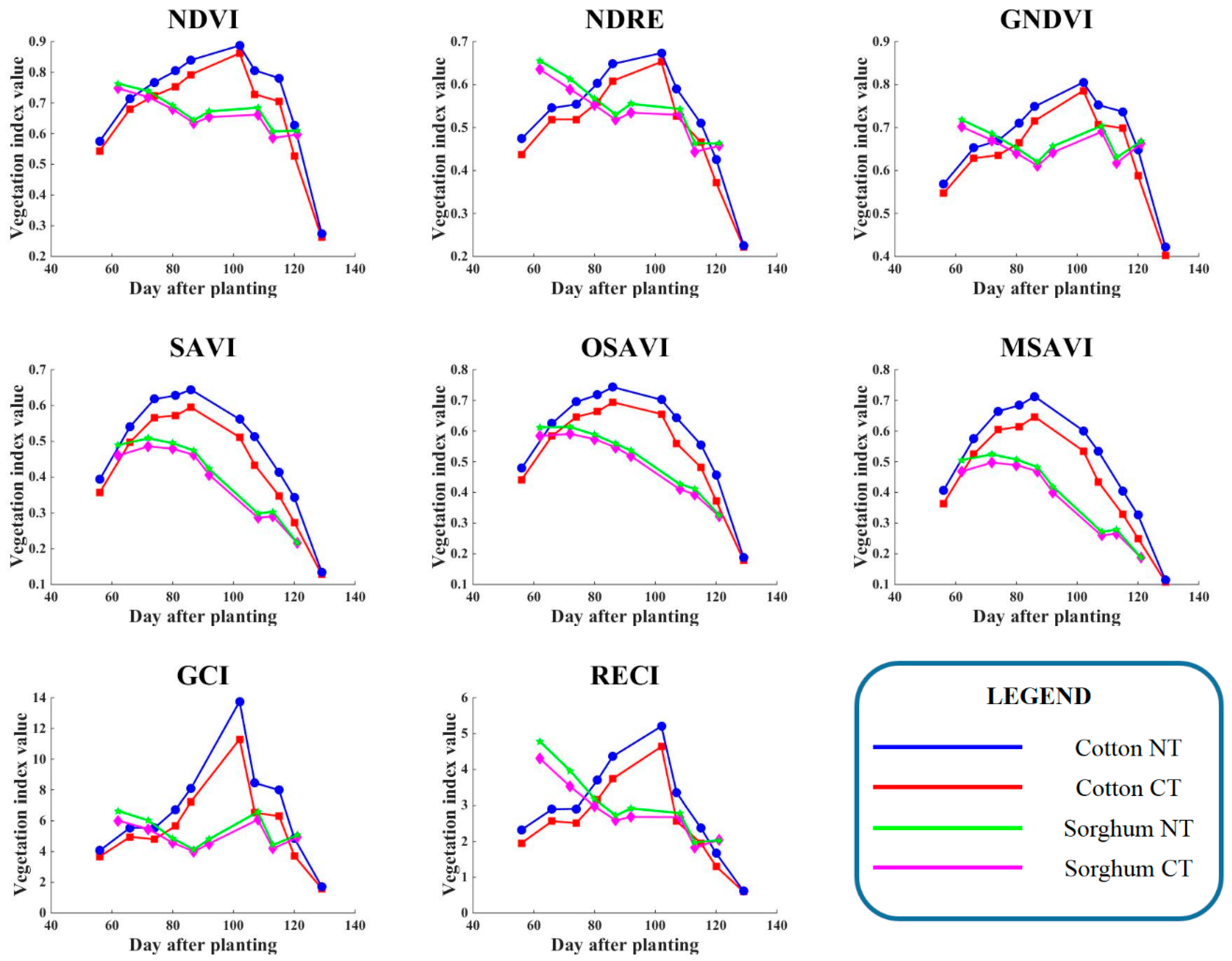
4.2. Time Series RGB and NIR VIs
4.3. Difference Measurement and Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arvor, D.; Jonathan, M.; Meirelles, M.S.P.; Dubreuil, V.; Durieux, L. Classification of MODIS EVI time series for crop mapping in the state of Mato Grosso, Brazil. Int. J. Remote Sens. 2011, 32, 7847–7871. [Google Scholar] [CrossRef]
- Li, Q.; Cao, X.; Jia, K.; Zhang, M.; Dong, Q. Crop type identification by integration of high-spatial resolution multispectral data with features extracted from coarse-resolution time-series vegetation index data. Int. J. Remote Sens. 2014, 35, 6076–6088. [Google Scholar] [CrossRef]
- Sonobe, R.; Yamaya, Y.; Tani, H.; Wang, X.; Kobayashi, N.; Mochizuki, K.I. Crop classification from Sentinel-2-derived vegetation indices using ensemble learning. J. Appl. Remote Sens. 2018, 12, 026019. [Google Scholar] [CrossRef] [Green Version]
- De Souza, C.H.W.; Mercante, E.; Johann, J.A.; Lamparelli, R.A.C.; Uribe-Opazo, M.A. Mapping and discrimination of soya bean and corn crops using spectro-temporal profiles of vegetation indices. Int. J. Remote Sens. 2015, 36, 1809–1824. [Google Scholar] [CrossRef]
- Murakami, T.; Ogawa, S.; Ishitsuka, N.; Kumagai, K.; Saito, G. Crop discrimination with multitemporal SPOT/HRV data in the Saga plains, Japan. Int. J. Remote Sens. 2001, 22, 1335–1348. [Google Scholar] [CrossRef]
- Siachalou, S.; Mallinis, G.; Tsakiri-Strati, M. Analysis of time-series spectral index data to enhance crop identification over a Mediterranean rural landscape. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1508–1512. [Google Scholar] [CrossRef]
- Yu, B.; Shang, S. Multi-year mapping of maize and sunflower in Hetao irrigation district of China with high spatial and temporal resolution vegetation index series. Remote Sens. 2017, 9, 855. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, M.; Zhang, X.; Zeng, H.; Wu, B. Mapping winter wheat biomass and yield using time series data blended from PROBA-V 100-and 300-m S1 products. Remote Sens. 2016, 8, 824. [Google Scholar] [CrossRef]
- Gouveia, C.M.; Trigo, R.M.; Beguería, S.; Vicente-Serrano, S.M. Drought impacts on vegetation activity in the Mediterranean region: An assessment using remote sensing data and multi-scale drought indicators. Glob. Planet. Chang. 2017, 151, 15–27. [Google Scholar] [CrossRef]
- Jay, S.; Maupas, F.; Bendoula, R.; Gorretta, N. Retrieving LAI, chlorophyll and nitrogen contents in sugar beet crops from multi-angular optical remote sensing: Comparison of vegetation indices and PROSAIL inversion for field phenotyping. Field Crop. Res. 2017, 210, 33–46. [Google Scholar] [CrossRef] [Green Version]
- Kooistra, L.; Clevers, J.G.P.W. Estimating potato leaf chlorophyll content using ratio vegetation indices. Remote Sens. Lett. 2016, 7, 611–620. [Google Scholar] [CrossRef] [Green Version]
- Serbin, G.; Hunt, E.R., Jr.; Daughtry, C.S.T.; McCarty, G.W. Assessment of spectral indices for cover estimation of senescent vegetation. Remote Sens. Lett. 2013, 4, 552–560. [Google Scholar] [CrossRef]
- Sivanpillai, R.; Claypool, D.A.; Siloju, R. Relating AEROCam-derived NDVI to apparent soil electrical conductivity (ECa) for corn fields in Wyoming, USA. Remote Sens. Lett. 2012, 3, 49–56. [Google Scholar] [CrossRef]
- Zhang, C.; Ren, H.; Qin, Q.; Ersoy, O.K. A new narrow band vegetation index for characterizing the degree of vegetation stress due to copper: The copper stress vegetation index (CSVI). Remote Sens. Lett. 2017, 8, 576–585. [Google Scholar] [CrossRef]
- Bala, S.K.; Islam, A.S. Correlation between potato yield and MODIS-derived vegetation indices. Int. J. Remote Sens. 2009, 30, 2491–2507. [Google Scholar] [CrossRef]
- Esquerdo, J.C.D.M.; Zullo Júnior, J.; Antunes, J.F.G. Use of NDVI/AVHRR time-series profiles for soybean crop monitoring in Brazil. Int. J. Remote Sens. 2011, 32, 3711–3727. [Google Scholar] [CrossRef]
- Huang, J.; Wang, H.; Dai, Q.; Han, D. Analysis of NDVI data for crop identification and yield estimation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 4374–4384. [Google Scholar] [CrossRef]
- Jiang, Z.; Chen, Z.; Chen, J.; Ren, J.; Li, Z.; Sun, L. The estimation of regional crop yield using ensemble-based four-dimensional variational data assimilation. Remote Sens. 2014, 6, 2664–2681. [Google Scholar] [CrossRef]
- Kern, A.; Barcza, Z.; Marjanović, H.; Árendás, T.; Fodor, N.; Bónis, P.; Bognár, P.; Lichtenberger, J. Statistical modelling of crop yield in Central Europe using climate data and remote sensing vegetation indices. Agric. For. Meteorol. 2018, 260, 300–320. [Google Scholar] [CrossRef]
- Meroni, M.; Fasbender, D.; Balaghi, R.; Dali, M.; Haffani, M.; Haythem, I.; Hooker, J.; Lahlou, M.; Lopez-Lozano, R.; Mahyou, H.; et al. Evaluating NDVI data continuity between SPOT-VEGETATION and PROBA-V missions for operational yield forecasting in North African countries. IEEE Trans. Geosci. Remote Sens. 2016, 54, 795–804. [Google Scholar] [CrossRef]
- Rembold, F.; Atzberger, C.; Savin, I.; Rojas, O. Using low resolution satellite imagery for yield prediction and yield anomaly detection. Remote Sens. 2013, 5, 1704–1733. [Google Scholar] [CrossRef]
- Garonna, I.; Fazey, I.; Brown, M.E.; Pettorelli, N. Rapid primary productivity changes in one of the last coastal rainforests: The case of Kahua, Solomon Islands. Environ. Conserv. 2009, 36, 253–260. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Lee, S.J.; Cho, J.; Hong, S.; Ha, K.J.; Lee, H.; Lee, Y.W. On the relationships between satellite-based drought index and gross primary production in the North Korean croplands, 2000–2012. Remote Sens. Lett. 2016, 7, 790–799. [Google Scholar] [CrossRef]
- Liu, W.T.; Kogan, F. Monitoring Brazilian soybean production using NOAA/AVHRR based vegetation condition indices. Int. J. Remote Sens. 2002, 23, 1161–1179. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, L. The potential of the MERIS terrestrial chlorophyll index for crop yield prediction. Remote Sens. Lett. 2014, 5, 733–742. [Google Scholar] [CrossRef]
- Metternicht, G. Vegetation indices derived from high-resolution airborne videography for precision crop management. Int. J. Remote Sens. 2003, 24, 2855–2877. [Google Scholar] [CrossRef]
- Rud, R.; Shoshany, M.; Alchanatis, V. Spectral indicators for salinity effects in crops: A comparison of a new green indigo ratio with existing indices. Remote Sens. Lett. 2011, 2, 289–298. [Google Scholar] [CrossRef]
- Milas, A.S.; Vincent, R.K. Monitoring Landsat vegetation indices for different crop treatments and soil chemistry. Int. J. Remote Sens. 2017, 38, 141–160. [Google Scholar] [CrossRef]
- Triplett, G.B.; Dick, W.A. No-tillage crop production: A revolution in agriculture! Agron. J. 2008, 100, S-153–S-165. [Google Scholar] [CrossRef]
- Pittelkow, C.M.; Linquist, B.A.; Lundy, M.E.; Liang, X.; Van Groenigen, K.J.; Lee, J.; Van Gestel, N.; Six, J.; Venterea, R.T.; Van Kessel, C. When does no-till yield more? a global meta-analysis. Field Crop. Res. 2015, 183, 156–168. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Peña, J.M.; De Castro, A.I.; López-Granados, F. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Prueger, J.H. Value of using different vegetative indices to quantify agricultural crop characteristics at different growth stages under varying management practices. Remote Sens. 2010, 2, 562–578. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Keefe, R.F.; Long, D.S.; Davis, A.S.; Vierling, L.A. Active ground optical remote sensing for improved monitoring of seedling stress in nurseries. Sensors 2010, 10, 2843–2850. [Google Scholar] [CrossRef] [PubMed]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Camargo Neto, J. A Combined Statistical-Soft Computing Approach for Classification and Mapping Weed Species in Minimum-Tillage Systems. ETD Collection for University of Nebraska-Lincoln. Ph.D. Thesis, University of Nebraska-Lincoln, Lincoln, NE, USA, 2004. [Google Scholar]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In NASA Goddard Space Flight Center 3d ERTS-1 Symposium; NASA: Washington, DC, USA, 1974; Volume 1, pp. 309–317. [Google Scholar]
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.; et al. Coincident detection of crop water stress, nitrogen status and canopy density using ground based multispectral data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000; Volume 1619. [Google Scholar]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Peñuelas, J.; Gamon, J.A.; Fredeen, A.L.; Merino, J.; Field, C.B. Reflectance indices associated with physiological changes in nitrogen- and water-limited sunflower leaves. Remote Sens. Environ. 1994, 48, 135–146. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Reed, B.C.; Brown, J.F.; VanderZee, D.; Loveland, T.R.; Merchant, J.W.; Ohlen, D.O. Measuring phenological variability from satellite imagery. J. Veg. Sci. 1994, 5, 703–714. [Google Scholar] [CrossRef]
- Hill, M.J.; Donald, G.E. Estimating spatio-temporal patterns of agricultural productivity in fragmented landscapes using AVHRR NDVI time series. Remote Sens. Environ. 2003, 84, 367–384. [Google Scholar] [CrossRef]











| Type | Date | Altitude | Overlap | Spatial Resolution (cm) |
|---|---|---|---|---|
| RGB | 20 May 2017 | 30 m | 80% | 0.84 |
| 30 May 2017 | 30 m | 80% | 0.76 | |
| 7 June 2017 | 30 m | 80% | 0.80 | |
| 14 June 2017 | 30 m | 80% | 0.79 | |
| 19 June 2017 | 30 m | 80% | 0.78 | |
| 5 July 2017 | 20 m | 80% | 0.51 | |
| 10 July 2017 | 30 m | 80% | 0.83 | |
| 18 July 2017 | 30 m | 80% | 0.82 | |
| 23 July 2017 | 25 m | 85% | 0.62 | |
| 1 August 2017 | 25 m | 85% | 0.68 | |
| NIR | 20 May 2017 | 40 m | 60% | 1.69 |
| 30 May 2017 | 40 m | 60% | 1.58 | |
| 7 June 2017 | 40 m | 60% | 1.58 | |
| 14 June 2017 | 40 m | 60% | 1.65 | |
| 19 June 2017 | 40 m | 60% | 1.62 | |
| 5 July 2017 | 40 m | 60% | 1.60 | |
| 10 July 2017 | 40 m | 60% | 1.64 | |
| 18 July 2017 | 40 m | 60% | 1.63 | |
| 23 July 2017 | 40 m | 60% | 1.67 | |
| 1 August 2017 | 40 m | 75% | 1.63 |
| Reflectance (%) | Wavelength (nm) | |||
|---|---|---|---|---|
| 460 nm (Blue) | 525 nm (Green) | 625 nm (Red) | ||
| Reflectance panels | Black | 2.5694 | 2.5794 | 2.6259 |
| Dark gray | 13.2275 | 13.0259 | 12.7661 | |
| Light gray | 34.3803 | 33.9623 | 33.3508 | |
| White | 54.7198 | 55.6298 | 56.1708 | |
| VIs Type | Crop Type | VIs Name | Peak Day after Plating (Days) | NRMSD between CT and NT (%) | # of Inflection Points |
|---|---|---|---|---|---|
| RGB | Cotton | GRVI | 81(CT), 86(NT) | 6.20 | 3 |
| MGRVI | 81 | 7.53 | 1 | ||
| RGBVI | 81 | 7.52 | 6(CT), 1(NT) | ||
| ExG | 81(CT), 86(NT) | 7.03 | 3(CT), 1(NT) | ||
| ExGR | 81(CT), 86(NT) | 6.57 | 3 | ||
| Sorghum | GRVI | - | 1.36 | 1 | |
| MGRVI | - | 1.50 | 1 | ||
| RGBVI | - | 0.79 | 3 | ||
| ExG | - | 1.42 | 0 | ||
| ExGR | - | 1.41 | 1(CT), 0(NT) | ||
| NIR | Cotton | NDVI | 102 | 7.57 | 1 |
| NDRE | 102 | 6.83 | 3(CT), 1(NT) | ||
| GNDVI | 102 | 6.31 | 1 | ||
| SAVI | 86 | 7.89 | 1 | ||
| OSAVI | 86 | 7.95 | 1 | ||
| MSAVI | 86 | 8.25 | 1 | ||
| GCI | 102 | 5.29 | 3 | ||
| RECI | 102 | 5.20 | 3(CT), 1(NT) | ||
| Sorghum | NDVI | - | 2.30 | 3 | |
| NDRE | - | 2.99 | 3(CT), 2(NT) | ||
| GNDVI | - | 2.27 | 3 | ||
| SAVI | - | 2.90 | 3 | ||
| OSAVI | - | 2.78 | 1 | ||
| MSAVI | - | 3.13 | 3 | ||
| GCI | - | 3.68 | 3 | ||
| RECI | - | 3.47 | 3 |
| VIs Type | Crop Type | VIs Name | Dates | # of Significant Dates (α = 0.05) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 20 May | 30 May | 7 June | 14 June | 19 July | 5 July | 10 July | 18 July | 23 July | 1 August | ||||
| RGB | Cotton | GRVI | −14.76 | 19.34 | 32.68 | 27.18 | 35.59 | 13.28 | 45.69 | 44.07 | 33.99 | −1.29 | 8/10 |
| MGRVI | −10.86 | 21.29 | 32.45 | 31.88 | 38.52 | 15.92 | 46.40 | 44.75 | 34.77 | 4.20 | 9/10 | ||
| RGBVI | −20.77 | 20.21 | 16.39 | 34.13 | 45.11 | 18.69 | 50.82 | 48.01 | 46.74 | 2.80 | 9/10 | ||
| ExG | −20.91 | 19.22 | 31.15 | 29.85 | 38.30 | 13.54 | 47.69 | 45.46 | 37.04 | −5.31 | 8/10 | ||
| ExGR | −19.17 | 19.22 | 32.15 | 28.32 | 36.99 | 12.98 | 46.55 | 44.56 | 35.39 | −3.21 | 8/10 | ||
| Sorghum | GRVI | 4.87 | −7.98 | −10.59 | −11.16 | −17.61 | −2.06 | 1.11 | −0.04 | - | - | 1/8 | |
| MGRVI | 2.61 | −6.76 | −9.74 | −10.28 | −17.82 | −0.52 | 1.95 | 0.75 | - | - | 2/8 | ||
| RGBVI | 3.54 | −3.83 | −2.01 | 0.02 | −0.29 | 3.75 | 3.03 | 0.62 | - | - | 3/8 | ||
| ExG | 5.22 | −7.59 | −8.30 | −8.38 | −12.94 | −0.23 | 2.68 | 0.39 | - | - | 2/8 | ||
| ExGR | 5.17 | −7.92 | −9.47 | −9.89 | −15.53 | −1.04 | 1.85 | 0.12 | - | - | 2/8 | ||
| NIR | Cotton | NDVI | 21.38 | 27.26 | 37.31 | 40.67 | 42.57 | 29.69 | 48.44 | 45.83 | 47.92 | 19.25 | 10/10 |
| NDRE | 28.80 | 25.47 | 31.56 | 30.61 | 34.01 | 22.58 | 47.21 | 35.30 | 40.98 | 9.04 | 10/10 | ||
| GNDVI | 21.31 | 25.35 | 37.46 | 40.47 | 35.64 | 24.59 | 42.31 | 35.11 | 45.40 | 23.64 | 10/10 | ||
| SAVI | 32.57 | 34.43 | 39.21 | 42.52 | 37.61 | 31.08 | 48.68 | 38.75 | 44.41 | 12.38 | 10/10 | ||
| OSAVI | 29.86 | 32.98 | 39.62 | 44.72 | 40.93 | 34.17 | 50.80 | 43.22 | 46.64 | 15.98 | 10/10 | ||
| MSAVI | 33.26 | 35.82 | 41.50 | 43.22 | 39.73 | 30.62 | 48.08 | 37.39 | 42.92 | 11.02 | 10/10 | ||
| GCI | 23.51 | 26.06 | 33.52 | 33.11 | 25.26 | 28.46 | 40.11 | 30.23 | 38.39 | 21.38 | 10/10 | ||
| RECI | 31.57 | 27.61 | 29.48 | 24.85 | 29.43 | 21.05 | 46.30 | 31.78 | 37.34 | 8.79 | 10/10 | ||
| Sorghum | NDVI | 6.14 | 8.41 | 5.28 | 5.33 | 9.92 | 14.37 | 15.70 | 8.02 | - | - | 8/8 | |
| NDRE | 10.00 | 14.30 | 9.31 | 8.79 | 15.35 | 13.24 | 21.05 | 4.86 | - | - | 8/8 | ||
| GNDVI | 9.25 | 9.06 | 7.42 | 5.88 | 9.67 | 9.83 | 11.77 | 3.65 | - | - | 8/8 | ||
| SAVI | 16.08 | 11.82 | 8.84 | 8.29 | 11.77 | 11.39 | 14.72 | 1.05 | - | - | 7/8 | ||
| OSAVI | 13.42 | 10.79 | 7.52 | 7.05 | 11.40 | 14.42 | 17.44 | 3.89 | - | - | 8/8 | ||
| MSAVI | 17.12 | 12.06 | 9.07 | 8.35 | 12.21 | 10.74 | 13.96 | 0.12 | - | - | 7/8 | ||
| GCI | 16.57 | 16.94 | 10.65 | 6.12 | 12.90 | 12.09 | 10.61 | 5.98 | - | - | 8/8 | ||
| RECI | 15.26 | 18.51 | 11.35 | 9.98 | 17.03 | 8.61 | 17.73 | −0.90 | - | - | 7/8 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeom, J.; Jung, J.; Chang, A.; Ashapure, A.; Maeda, M.; Maeda, A.; Landivar, J. Comparison of Vegetation Indices Derived from UAV Data for Differentiation of Tillage Effects in Agriculture. Remote Sens. 2019, 11, 1548. https://doi.org/10.3390/rs11131548
Yeom J, Jung J, Chang A, Ashapure A, Maeda M, Maeda A, Landivar J. Comparison of Vegetation Indices Derived from UAV Data for Differentiation of Tillage Effects in Agriculture. Remote Sensing. 2019; 11(13):1548. https://doi.org/10.3390/rs11131548
Chicago/Turabian StyleYeom, Junho, Jinha Jung, Anjin Chang, Akash Ashapure, Murilo Maeda, Andrea Maeda, and Juan Landivar. 2019. "Comparison of Vegetation Indices Derived from UAV Data for Differentiation of Tillage Effects in Agriculture" Remote Sensing 11, no. 13: 1548. https://doi.org/10.3390/rs11131548