Increasing the Number of Sea Surface Reflected Signals Received by GNSS-Reflectometry Altimetry Satellite Using the Nadir Antenna Observation Capability Optimization Method

Abstract
:
1. Introduction
2. Data Sets
2.1. TDS-1 Space GPS Receiver Remote Sensing Instrument Data Collections
- The SNR of the peak DDM. This data is recorded in the metadata.nc file of the L1 products and is used to verify the accuracy of NASNRM.
- The nadir antenna gain map. The gain of the antenna in different directions is not the same. For better simulation calculation in Section 4.1, the TDS-1 nadir antenna gain map file is used to calculate the SNR.
- TDS-1 satellite ephemeris. Since TDS-1 products have been a threshold in terms of signal channel number, it is not possible to obtain all available SPs information within a period of time through this product. Based on this restriction, the SPs information is recalculated. In order to avoid errors introduced by the orbital simulation, the coordinates of the TDS-1 in the L1 product are used.
- Wind speed. In order to calculate the weight of different wind speeds in a period of time, this paper gets the wind speed information from the TDS-1 observation based on the ‘L2_FDI.nc’ in the L2 product.
2.2. Global Navigation Satellite System Precision Ephemeris
3. Methodology
3.1. The Nadir Antenna Signal-to-Noise Ratio Model (NASNRM)
3.2. The Specular Point Filtering Algorithm (SPFA)
- When , , ;
- When , , ;
- When , , .
4. Results and Discussions
4.1. The Signal-to-Noise Ratio of Received Reflected Signals
- As the elevation angle increases, the SNR increases. This is because as the elevation angle increases, the length of the GNSS signal propagation path is reduced, which in turn reduces the power loss due to signal propagation. At the same time, the higher the elevation angle, the stronger the scattering ability of the signal on the sea surface. When the elevation angle at the range of 0 to 10 degrees, the SNR increases obviously. As the elevation angle increases gradually, the change gradually becomes gentle. This indicates that SNR is sensitive to the change of the elevation angle in a low angle range, while SNR is less affected by the change of the elevation angle in a medium and high angle range. This can provide a reference for the parameter setting of future GNSS-R spaceborne multi-channel antenna.
- In order to ensure the quality of the observation, the TDS-1 has threshold settings at both the elevation angle (~45°) and the SNR (~−10 dB). The SNR obtained from NASNRM is consistent with the trend of TDS-1 observations, and the values are also in the same order of magnitude.
- The calculated SNR is based on the wave spectrum. However, there is still a difference between the real sea conditions and the sea surface simulated according to the wave spectrum.
- The measured antenna temperature mainly ranges from 300 to 800 K. In this paper, the antenna temperature is set to 550 K when calculating SNR. This may cause the results to deviate from the actual measurement.
- The effect of the TDS-1 attitude is not taken into account when calculating the SNR, which may be biased when using the gain of nadir antenna.
- The transmission power of different GPS satellites is different, and there is also a problem that the transmission power changes with time with the GPS IIF satellite. This factor is not considered in the calculation.
4.2. Minimum Elevation Angle That Meets SNR Requirements
4.3. The Number of Received Reflected Signals
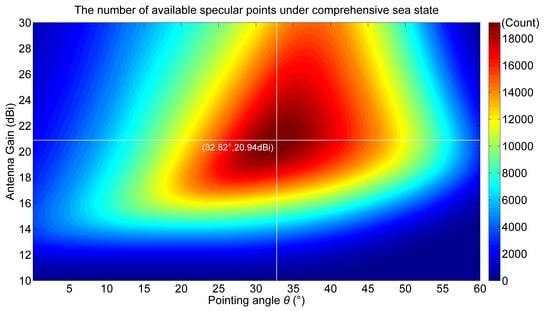
- Under different wind speeds, as the antenna gain and the pointing angle increase, the number of SPs can be peaked. This shows that the reasonable design of antenna gain and pointing angle can optimize the number of received GNSS-R altimetry reflected signals.
- When the pointing angle is constant, the number of SPs can be increased first as the antenna gain increases, and then gradually decreases after reaching the peak. This is because the initial increase in antenna gain will increase the weak signal power, so that more reflected signals are captured by the antenna. The number of signals increased is more than the number of signals decreased by the decrease in the antenna operating range (HPBW reduction) due to the increase of antenna gain. When the two parts are equal, the number of available SPs can reach the peak value. As the antenna gain continues to increase, the number of signals increased due to the increase in power is gradually less than the number of signals reduced due to the diminish in the antenna view field, and the number of available SPs gradually decreased.
- When the antenna gain is low, the number of available SPs gradually decreases as the pointing angle increases. This is because the increase of the pointing angle causes the signal propagation path to become longer and causes more power loss, so that some signals cannot be captured by the low-gain antenna. When the antenna gain is high, the number of available SPs will reach the peak and then gradually decrease with the increase of the pointing angle. This is because the increase of the pointing angle will increase the coverage area of the antenna. Although the increase of the angle will lengthen the signal propagation path and cause more power loss, which will make some signals unable to be captured, the increase of the angle will also make more reflection signals received by the high-gain antenna, thus increasing the number of available SPs. When the number of available SPs reaches its peak, compared to the number of reflected signals that are increased due to the increase in angle, the number of signals that cannot meet the SNR requirement due to the longer signal propagation path is larger, which ultimately leads to the decrease of the number of available SPs.
4.4. The Nadir Antenna Parameters Combination Optimization
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jin, S.; Cardellach, E.; Xie, F. GNSS Remote Sensing: Theory, Methods and Applications; Springer-Verlag: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Jin, S.; Feng, G.P.; Gleason, S. Remote sensing using GNSS signals: Current status and future directions. Adv. Space Res. 2011, 47, 1645–1653. [Google Scholar] [CrossRef]
- Martin-Neira, M. A Passive Reflectometry and Interferometry System (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Martín-Neira, M.; Caparrini, M.; Font-Rossello, J.; Lannelongue, S.; Vallmitjana, C.S. The PARIS concept: An experimental demonstration of sea surface altimetry using GPS reflected signals. IEEE Trans. Geosci. Remote Sens. 2001, 39, 142–150. [Google Scholar] [CrossRef]
- Martín-Neira, M.; Colmenarejo, P.; Ruffini, G.; Serra, C. Altimetry precision of 1 cm over a pond using the wide-lane carrier phase of GPS reflected signals. Can. J. Remote Sens. 2002, 28, 394–403. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.; Cipollini, P.; Zuffada, C. First spaceborne observation of sea surface height using GPS-Reflectometry. Geophys. Res. Lett. 2016, 43, 767–774. [Google Scholar] [CrossRef]
- Rius, A.; Cardellach, E.; Fabra, F.; Li, W.; Ribó, S.; Hernández-Pajares, M. Feasibility of GNSS-R ice sheet altimetry in Greenland using TDS-1. Remote Sens. 2017, 9, 742. [Google Scholar] [CrossRef]
- Cardellach, E.; Rius, A.; Martín-Neira, M.; Fabra, F.; Nogués-Correig, O.; Ribó, S.; Kainulainen, J.; Camps, A.; D’Addio, S. Consolidating the precision of interferometric GNSS-R ocean altimetry using airborn eexperimental data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4992–5004. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Sekulic, I.; Rius, J.M. GNSS-R altimetry performance analysis for the GEROS Experiment on board the International Space Station. Sensors 2017, 17, 1583. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Lake Level and Surface Topography Measured with Spaceborne GNSS-Reflectometry from CYGNSS Mission: Example for the Lake Qinghai. Geophys. Res. Lett. 2018, 45, 13332–13341. [Google Scholar] [CrossRef]
- Fabra, F.; Cardellach, E.; Rius, A.; Ribó, S.; Oliveras, S.; Nogués-Correig, O.; Rivas, M.B.; Semmling, M.; D’Addio, S. Phase altimetry with dual polarization GNSS-R oversea ice. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2112–2121. [Google Scholar] [CrossRef]
- Semmling, A.M.; Wickert, J.; Schön, S.; Stosius, R.; Markgraf, M.; Gerber, T.; Ge, M.; Beyerle, G. A zeppelin experiment to study airborne altimetry using specular Global Navigation Satellite System reflections. Radio Sci. 2013, 48, 427–440. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Zheng, W.; Li, Z. Preferred design and error analysis for the future dedicated deep-space Mars-SST satellite gravity mission. Astrophys. Space Sci. 2018, 363, 172. [Google Scholar] [CrossRef]
- Zheng, W.; Xu, H.; Zhong, M.; Yun, M. Requirements analysis for future satellite gravity mission Improved-GRACE. Surv. Geophys. 2015, 36, 87–109. [Google Scholar] [CrossRef]
- Zheng, W.; Hsu, H.; Zhong, M.; Yun, M. Improvement in the recovery accuracy of the lunar gravity field based on the future Moon-ILRS spacecraft gravity mission. Surv. Geophys. 2015, 36, 587–619. [Google Scholar] [CrossRef]
- Jircitano, A.; Dosch, D. Gravity aided inertial navigation system (GAINS). In Proceedings of the ION 47th Annual Meeting, Williamsburg, VA, USA, 10–12 June 1991. [Google Scholar]
- Metzger, E.H.; Jircitano, A. Inertial Navigation Performance Improvement Using Gravity Gradient Matching Techniques. J. Spacecr. Rocket. 2012, 13, 323–324. [Google Scholar] [CrossRef]
- Silver, S. Microwave Antenna Theory and Design; Rad. Lab Series; Institution of Electrical Engineers: London, UK, 1949. [Google Scholar]
- Hajj, G.A.; Zuffada, C. Theoretical description of a bistatic system for ocean altimetry using the GPS signal. Radio Sci. 2003, 38, 1089. [Google Scholar] [CrossRef]
- Jales, P. Spaceborne Receiver Design for Scatterometric GNSS Reflectometry. Ph.D. Thesis, University of Surrey, Guildford, UK, 2012. [Google Scholar]
- Gao, F.; Xu, T.; Wang, N.; Jiang, C.; Du, Y.; Nie, W.; Xu, G. Spatiotemporal Evaluation of GNSS-R Based on Future Fully Operational Global Multi-GNSS and Eight-LEO Constellations. Remote Sens. 2018, 10, 67. [Google Scholar] [CrossRef]
- Bussy-Virat, C.D.; Ruf, C.S.; Ridley, A.J. Relationship Between Temporal and Spatial Resolution for a Constellation of GNSS-R Satellites. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Barbarossa, S.; Levrini, G. An antenna pattern synthesis technique for spaceborne SAR performance optimization. IEEE Trans. Geosci. Remote Sens. 1991, 29, 254–259. [Google Scholar] [CrossRef]
- Unwin, M.J.; Gleason, S.; Brennan, M. The space GPS reflectometry experiment on the UK disaster monitoring constellation satellite. In Proceedings of the ION-GPS/GNSS, Portland, OR, USA, 1 January 2003. [Google Scholar]
- Jales, P.; Unwin, M. MERRByS Product Manual—GNSS Reflectometry on TDS-1 with the SGR-ReSI; Surrey Satellite Technology LTD: Guildford, UK, 2017. [Google Scholar]
- Carreno-Luengo, H.; Camps, A.; Via, P.; Munoz, J.F.; Cortiella, A.; Vidal, D.; Jané, J.; Catarino, N.; Hagenfeldt, M.; Palomo, P. 3Cat-2—An Experimental Nanosatellite for GNSS-R Earth Observation: Mission Concept and Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4540–4551. [Google Scholar] [CrossRef]
- Ruf, C.; Chang, P.; Clarizia, M.P.; Gleason, S.; Jelenak, Z.; Murray, J.; Morris, M.; Musko, S.; Posselt, D.; Provost, D.; et al. CYGNSS Handbook; Michigan Publishing: Ann Arbor, MI, USA, 2016. [Google Scholar]
- Available online: http://www.cma.gov.cn/2011xwzx/2011xmtjj/201906/t20190608_526702.html (accessed on 12 July 2019).
- Feng, Y.; Zheng, Y. Efficient interpolations to GPS orbits for precise wide area applications. GPS Solut. 2005, 9, 273–282. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef] [Green Version]
- Skolnik, M.I. Radar Handbook; McGraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Picardi, G.; Seu, R.; Sorge, S.G. Bistatic model of ocean scattering. IEEE Trans. Antennas Propag. 2002, 46, 1531–1541. [Google Scholar] [CrossRef]
- Beckmann, P.; Spizzichino, A. The Scattering of Electromagnetic Wavesfrom Rough Surfaces; Pergamon Press: Oxford, UK, 1963. [Google Scholar]
- Soriano, G.; Saillard, M. A two-scale model for the ocean surface bistatic scattering. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Cox, C.; Munk, W. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. JOSA 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Chapron, B.; Katsaros, K. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. Oceans. 1997, 102, 157781–157796. [Google Scholar] [CrossRef]
- Angelopoulou, E. Specular Highlight Detection Based on the Fresnel Reflection Coefficient. In Proceedings of the IEEE International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007. [Google Scholar]
- Li, W.; Cardellach, E.; Fabra, F.; Ribo, S.; Rius, A. Assessment of Spaceborne GNSS-R Ocean Altimetry Performance Using CYGNSS Mission Raw Data. IEEE Trans. Geosci. Remote Sens. 2019, 99, 1–13. [Google Scholar] [CrossRef]
- Li, W.; Rius, A.; Fabra, F.; Cardellach, E.; Ribo, S.; Martín-Neira, M. Revisiting the GNSS-R Waveform Statistics and Its Impact on Altimetric Retrievals. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2854–2871. [Google Scholar] [CrossRef]
- Wu, F.; Zheng, W.; Li, Z.; Liu, Z. Improving the GNSS-R specular reflection point positioning accuracy using the gravity field normal projection reflection reference surface combination correction method. Remote Sens. 2019, 11, 33. [Google Scholar] [CrossRef]
- Mission and Product Descriptions. May 2016. Available online: http://www.merrbys.co.uk/Resources%20Page.htm (accessed on 12 July 2019).
- Lu, W.; Shuai, F.; Yang, R. Synthetic Array Processing for GNSS receiver in multipath environments. In Proceedings of the International Conference on Automatic Control and Artificial Intelligence, Xiamen, China, 3–5 March 2012. [Google Scholar]
- Pascual, D.; Onrubia, R.; Querol, J. Calibration of GNSS-R receivers with PRN signal injection: Methodology and validation with the microwave interferometric reflectometer (MIR). In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Cardellach, E.; Wickert, J.; Baggen, R.; Benito, J.; Camps, A.; Catarino, N.; Chapron, B.; Dielacher, A.; Fabra, F.; Flato, G.; et al. GNSS Transpolar Earth Reflectometry Exploring System (G-TERN): Mission Concept. IEEE Trans. Geosci. Remote Sens. 2018, 6, 13980–14018. [Google Scholar] [CrossRef]
- Martín-Neira, M.; Li, W.; Andrés-Beivide, A.; Ballesteros-Sels, X. Cookie: A satellite concept for GNSS remote sensing constellations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4593–4610. [Google Scholar] [CrossRef]
- Visser, H.J. Array and Phased Array Antenna Basics; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Orbital altitude of GPS satellite | 20200 |
| Orbital altitude of GNSS-R satellite (km) | 635 |
| Pointing angle (°) | 0 |
| Antenna peak gain (dBi) | 13.3 |
| Antenna gain pattern | TDS-1 nadir antenna gain map |
| Signal frequency (MHz) | 1575.42 |
| Signal wavelength (m) | 0.19 |
| Coherent integration time (ms) | 1 |
| Antenna temperature (K) | 550 |
| Noise bandwidth (Hz) | 1000 |
| Integration area (km × km) | 100 × 100 |
| Sampling size (m × m) | 100 × 100 |
| Integration approach | Numerical integration |
| U10 (m/s) | 1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 | 19 | 21 | 23 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Standard deviation (dB) | 0.70 | 0.71 | 0.69 | 0.62 | 0.73 | 0.85 | 1.12 | 0.92 | 1.22 | 1.32 | 1.54 | 1.59 |
| Wind Speed U10 (m/s) | Antenna Gain (dBi) | Pointing Angle | Received Signal Quantity (Count) | Reflected Signal Utilization (%) |
|---|---|---|---|---|
| 1 | 16.80 | 30.02 | 21068 | 19.85 |
| 3 | 18.18 | 31.02 | 20670 | 19.47 |
| 5 | 19.02 | 31.54 | 20055 | 18.89 |
| 7 | 20.00 | 31.96 | 19925 | 18.77 |
| 9 | 20.33 | 32.01 | 19507 | 18.38 |
| 11 | 20.97 | 32.58 | 19473 | 18.34 |
| 13 | 21.35 | 32.99 | 19004 | 17.90 |
| 15 | 21.77 | 32.78 | 18756 | 17.67 |
| 17 | 21.98 | 32.78 | 18597 | 17.52 |
| 19 | 22.60 | 33.83 | 18488 | 17.42 |
| 21 | 22.87 | 33.46 | 18399 | 17.33 |
| 23 | 23.19. | 33.46 | 18299 | 17.24 |
| Parameter Combination | Antenna Gain (dBi) | Pointing Angle | Received Signal Quantity (Count) | Reflected Signal Utilization (%) |
|---|---|---|---|---|
| Optimization parameters | 20.94 | 32.82 | 19104 | 18.00% |
| TDS-1 satellite nadir antenna parameters | 13.30 | 0 | 2994 | 2.82% |
| Optimized parameters using TDS-1 nadir antenna gain | 13.30 | 20.23 | 4390 | 4.14% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Zheng, W.; Wu, F.; Kang, G.; Li, Z.; Wang, Q.; Cui, Z. Increasing the Number of Sea Surface Reflected Signals Received by GNSS-Reflectometry Altimetry Satellite Using the Nadir Antenna Observation Capability Optimization Method. Remote Sens. 2019, 11, 2473. https://doi.org/10.3390/rs11212473
Liu Z, Zheng W, Wu F, Kang G, Li Z, Wang Q, Cui Z. Increasing the Number of Sea Surface Reflected Signals Received by GNSS-Reflectometry Altimetry Satellite Using the Nadir Antenna Observation Capability Optimization Method. Remote Sensing. 2019; 11(21):2473. https://doi.org/10.3390/rs11212473
Chicago/Turabian StyleLiu, Zongqiang, Wei Zheng, Fan Wu, Guohua Kang, Zhaowei Li, Qingqing Wang, and Zhen Cui. 2019. "Increasing the Number of Sea Surface Reflected Signals Received by GNSS-Reflectometry Altimetry Satellite Using the Nadir Antenna Observation Capability Optimization Method" Remote Sensing 11, no. 21: 2473. https://doi.org/10.3390/rs11212473