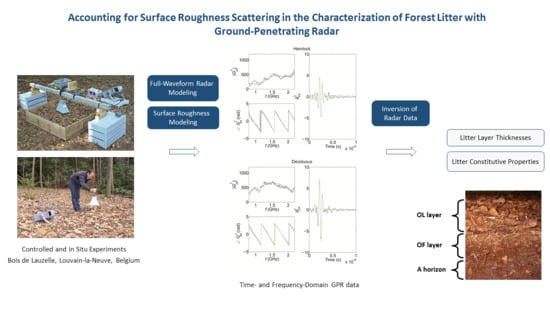
Accounting for Surface Roughness Scattering in the Characterization of Forest Litter with Ground-Penetrating Radar

 , , , and
, , , and
Abstract
:
1. Introduction
2. Material and Methods
2.1. Experimental Setups
2.2. Radar Measurements
2.3. Radar Data Processing
2.3.1. Radar Model
2.3.2. Model Configurations
2.3.3. Model Inversion
2.4. Statistics
3. Results and Discussion
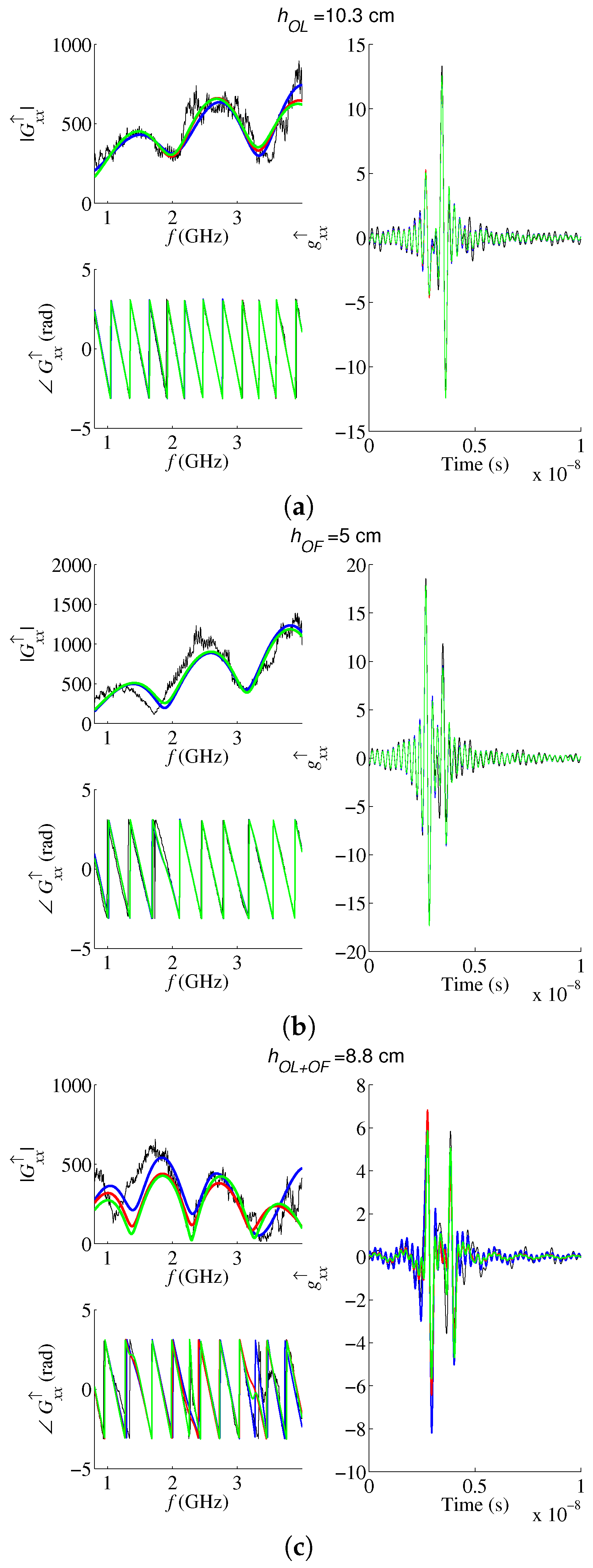
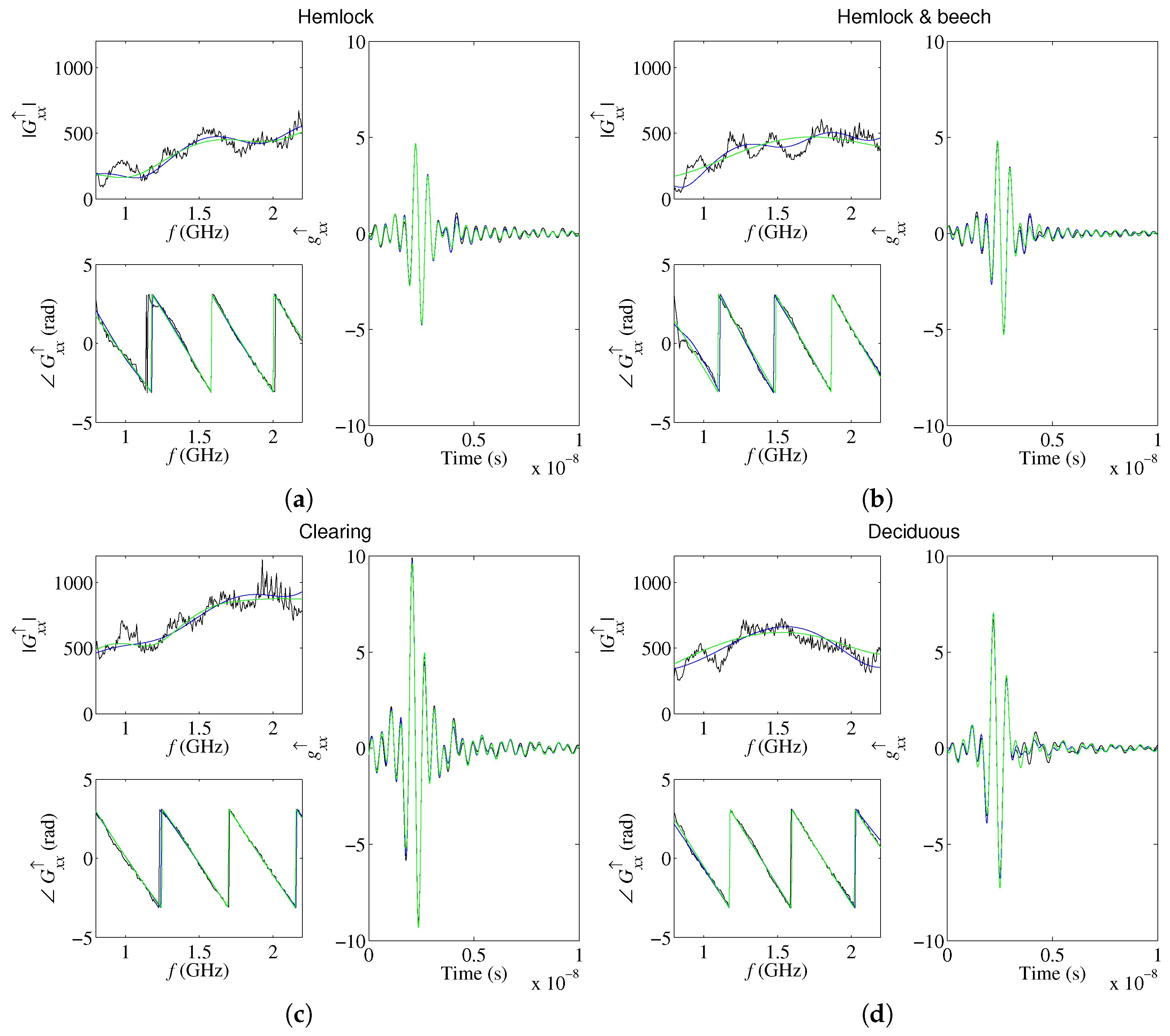
3.1. Radar Signal Modeling
3.2. Estimates of Litter Properties
3.2.1. Litter Layer Thicknesses
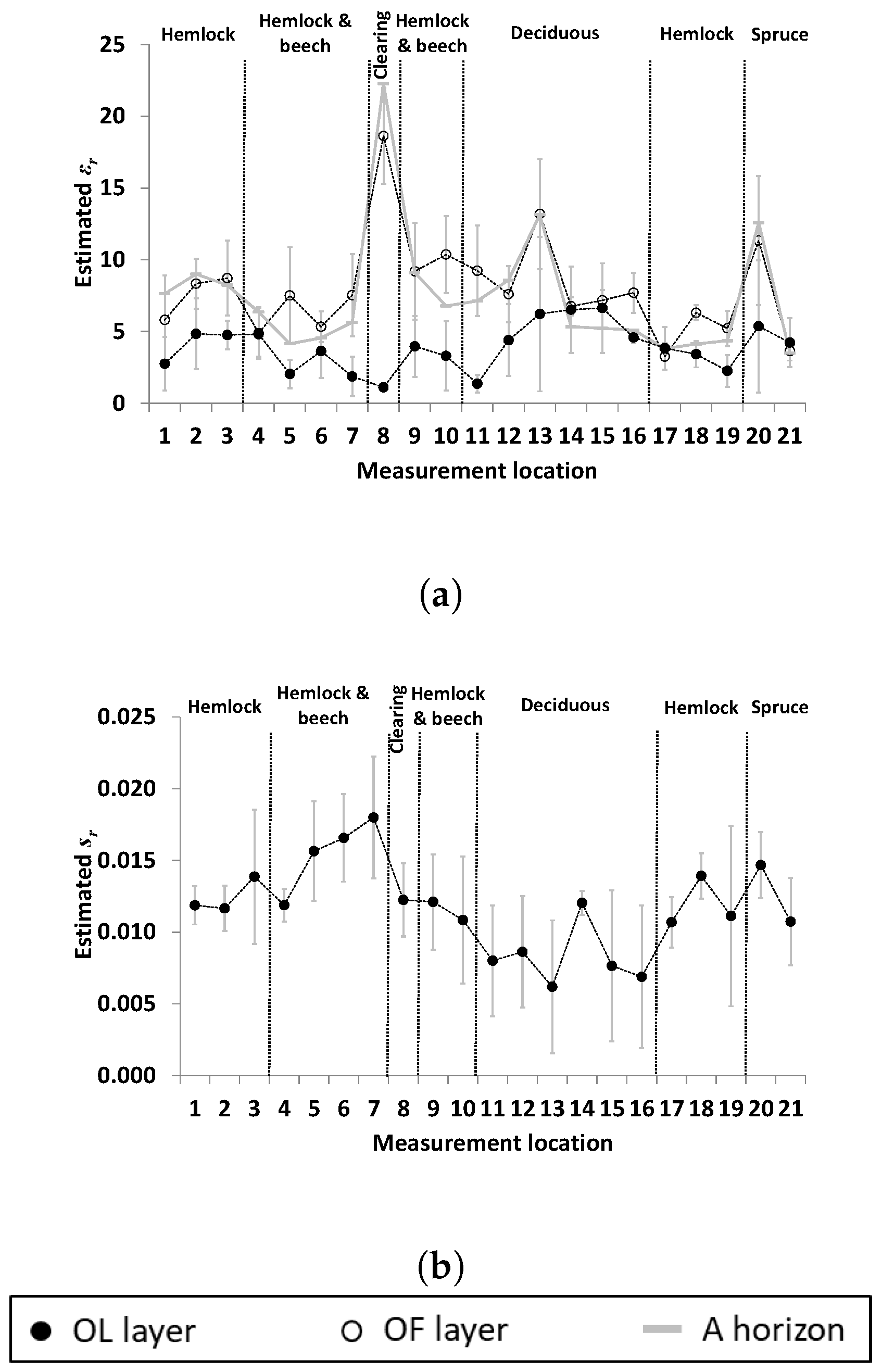
3.2.2. Litter Constitutive Properties
4. Conclusions and Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Saleh, K.; Wigneron, J.P.; Waldteufel, P.; de Rosnay, P.; Schwank, M.; Calvet, J.C.; Kerr, Y.H. Estimates of surface soil moisture under grass covers using L-band radiometry. Remote Sens. Environ. 2007, 109, 42–53. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Kerr, Y.; Waldteufel, P.; Saleh, K.; Escorihuela, M.J.; Richaume, P.; Ferrazzoli, P.; de Rosnay, P.; Gurney, R.; Calvet, J.C.; et al. L-band microwave emission of the biosphere (L-MEB) model: Description and calibration against experimental data sets over crop fields. Remote Sens. Environ. 2007, 107, 639–655. [Google Scholar] [CrossRef]
- Grant, J.P.; Wigneron, J.P.; Van de Griend, A.A.; Kruszewski, A.; Sobjaerg, S.S.; Skou, N. A field experiment on microwave forest radiometry: L-band signal behaviour for varying conditions of surface wetness. Remote Sens. Environ. 2007, 109, 10–19. [Google Scholar] [CrossRef]
- Panciera, R.; Walker, J.P.; Kalma, J.; Kim, E. A proposed extension to the soil moisture and ocean salinity level 2 algorithm for mixed forest and moderate vegetation pixels. Remote Sens. Environ. 2011, 115, 3343–3354. [Google Scholar] [CrossRef]
- Kurum, M.; O’Neill, P.E.; Lang, R.H.; Cosh, M.H.; Joseph, A.T.; Jackson, T.J. Impact of conifer forest litter on microwave emission at L-band. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1071–1084. [Google Scholar] [CrossRef]
- Guglielmetti, M.; Schwank, M.; Maetzler, C.; Oberdoerster, C.; Vanderborght, J.; Fluehler, H. FOSMEX: Forest soil moisture experiments with microwave radiometry. IEEE Trans. Geosci. Remote Sens. 2008, 46, 727–735. [Google Scholar] [CrossRef]
- Schwank, M.; Guglielmetti, M.; Matzler, C.; Fluhler, H. Testing a new model for the L-band radiation of moist leaf litter. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1982–1994. [Google Scholar] [CrossRef]
- Grant, J.P.; Van de Griend, A.A.; Schwank, M.; Wigneron, J.P. Observations and modeling of a pine forest floor at L-band. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2024–2034. [Google Scholar] [CrossRef]
- Wang, Y.; Day, J.L.; Davis, F.W. Sensitivity of modeled C- and L-band radar backscatter to ground surface parameters in Loblolly pine forest. Remote Sens. Environ. 1998, 66, 331–342. [Google Scholar] [CrossRef]
- Townsend, P.A. Estimating forest structure in wetlands using multitemporal SAR. Remote Sens. Environ. 2002, 79, 288–304. [Google Scholar] [CrossRef]
- Roberts, J.W.; Tesfamichael, S.; Gebreslasie, M.; van Aardt, J.; Ahmed, F.B. Forest structural assessment using remote sensing technologies: An overview of the current state of the art. South. Hemisph. For. J. 2007, 69, 183–203. [Google Scholar] [CrossRef]
- Grant, J.P.; Saleh-Contell, K.; Wigneron, J.P.; Guglielmetti, M.; Kerr, Y.H.; Schwank, M.; Skou, N.; de Griend, A.A.V. Calibration of the L-MEB model over a coniferous and a deciduous forest. IEEE Trans. Geosci. Remote Sens. 2008, 46, 808–818. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Tanase, M.A.; Bourgeau-Chavez, L.L.; Borr, M. Soil moisture limitations on monitoring boreal forest regrowth using spaceborne L-band SAR data. Remote Sens. Environ. 2011, 115, 227–232. [Google Scholar] [CrossRef]
- Kurum, M.; Lang, R.H.; O’Neill, P.E.; Joseph, A.T.; Jackson, T.J.; Cosh, M.H. A first-order radiative transfer model for microwave radiometry of forest canopies at L-band. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3167–3179. [Google Scholar] [CrossRef]
- Rahmoune, R.; Ferrazzoli, P.; Kerr, Y.H.; Richaume, P. SMOS level 2 retrieval algorithm over forests: Description and generation of global maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1430–1439. [Google Scholar] [CrossRef]
- Tamai, K.; Abe, T.; Araki, M.; Ito, H. Radiation budget, soil heat flux and latent heat flux at the forest floor in warm, temperate mixed forest. Hydrol. Process. 1998, 12, 2105–2114. [Google Scholar] [CrossRef]
- Sayer, E.J. Using experimental manipulation to assess the roles of leaf litter in the functioning of forest ecosystems. Biol. Rev. 2006, 81, 1–31. [Google Scholar] [CrossRef]
- Jonard, M.; André, F.; Jonard, F.; Mouton, N.; Proces, P.; Ponette, Q. Soil carbon dioxide efflux in pure and mixed stands of oak and beech. Ann. For. Sci. 2007, 64, 141–150. [Google Scholar] [CrossRef] [Green Version]
- Jonard, M.; Augusto, L.; Morel, C.; Achat, D.L.; Saur, E. Forest floor contribution to phosphorus nutrition: experimental data. Ann. For. Sci. 2009, 66, 510. [Google Scholar] [CrossRef]
- Gerrits, A.M.J.; Pfister, L.; Savenije, H.H.G. Spatial and temporal variability of canopy and forest floor interception in a beech forest. Hydrol. Process. 2010, 24, 3011–3025. [Google Scholar] [CrossRef]
- Ponge, J.F. Plant-soil feedbacks mediated by humus forms: A review. Soil Biol. Biochem. 2013, 57, 1048–1060. [Google Scholar] [CrossRef]
- Jonard, M.; Nicolas, M.; Coomes, D.A.; Caignet, I.; Saenger, A.; Ponette, Q. Forest soils in France are sequestering substantial amounts of carbon. Sci. Total Environ. 2017, 574, 616–628. [Google Scholar] [CrossRef] [Green Version]
- Kruse, J.; Simon, J.; Rennenberg, H. Soil respiration and soil organic matter decomposition in response to climate change. In Developments in Environmental Science; Matyssek, R., Clarke, N., Cudlin, P., Mikkelsen, T.N., Tuovinen, J.-P., Wieser, G., Paoletti, E., Eds.; Elsevier: Amsterdam, The Netherlands, 2013; Volume 13, pp. 131–149. [Google Scholar] [CrossRef]
- Jonard, F.; Bircher, S.; Demontoux, F.; Weihermüller, L.; Razafindratsima, S.; Wigneron, J.P.; Vereecken, H. Passive L-band microwave remote sensing of organic soil surface layers: A tower-based experiment. Remote Sens. 2018, 10, 304. [Google Scholar] [CrossRef]
- Yanai, R.D.; Stehman, S.V.; Arthur, M.A.; Prescott, C.E.; Friedland, A.J.; Siccama, T.G.; Binkley, D. Detecting change in forest floor carbon. Soil Sci. Soc. Am. J. 2003, 67, 1583–1593. [Google Scholar] [CrossRef]
- Jonard, M.; André, F.; Ponette, Q. Modeling leaf dispersal in mixed hardwood forests using a ballistic approach. Ecology 2006, 87, 2306–2318. [Google Scholar] [CrossRef]
- Jonard, M.; André, F.; Ponette, Q. Tree species mediated effects on leaf litter dynamics in pure and mixed stands of oak and beech. Can. J. For. Res. Revue Can. Rech. For. 2008, 38, 528–538. [Google Scholar] [CrossRef]
- Andivia, E.; Rolo, V.; Jonard, M.; Formánek, P.; Ponette, Q. Tree species identity mediates mechanisms of top soil carbon sequestration in a Norway spruce and European beech mixed forest. Ann. For. Sci. 2016, 73, 437–447. [Google Scholar] [CrossRef] [Green Version]
- Winkelbauer, J.; Volkel, J.; Leopold, M.; Bernt, N. Methods of surveying the thickness of humous horizons using ground penetrating radar (GPR): An example from the Garmisch-Partenkirchen area of the Northern Alps. Eur. J. For. Res. 2011, 130, 799–812. [Google Scholar] [CrossRef]
- Lambot, S.; Slob, E.C.; van den Bosch, I.; Stockbroeckx, B.; Vanclooster, M. Modeling of ground-penetrating radar for accurate characterization of subsurface electric properties. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2555–2568. [Google Scholar] [CrossRef]
- André, F.; Jonard, M.; Lambot, S. Non-invasive forest litter characterization using full-wave inversion of microwave radar data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 828–840. [Google Scholar] [CrossRef]
- André, F.; Jonard, F.; Jonard, M.; Lambot, S. In situ characterization of forest litter using ground-penetrating radar. J. Geophys. Res. G Biogeosci. 2016, 121, 879–894. [Google Scholar] [CrossRef]
- Jonard, F.; Weihermüller, L.; Vereecken, H.; Lambot, S. Accounting for soil surface roughness in the inversion of ultrawideband off-ground GPR signal for soil moisture retrieval. Geophysics 2012, 77, H1–H7. [Google Scholar] [CrossRef]
- Ament, W.S. Toward a theory of reflection by a rough surface. Proc. IRE 1953, 41, 142–146. [Google Scholar] [CrossRef]
- Beckmann, P.; Spizzichino, A. The Scattering of Electromagnetic Waves from Rough Surfaces; Artech House Inc.: Norwood, MA, USA, 1987; p. 511. [Google Scholar]
- Della Vecchia, A.; Ferrazzoli, P.; Wigneron, J.P.; Grant, J.P. Modeling forest emissivity at L-band and a comparison with multitemporal measurements. IEEE Geosci. Remote Sens. Lett. 2007, 4, 508–512. [Google Scholar] [CrossRef]
- Lawrence, H.; Demontoux, F.; Wigneron, J.; Paillou, P.; Wu, T.; Kerr, Y.H. Evaluation of a numerical modeling approach based on the finite-element method for calculating the rough surface scattering and emission of a soil layer. IEEE Geosci. Remote Sens. Lett. 2011, 8, 953–957. [Google Scholar] [CrossRef]
- Brahy, V.; Delvaux, B. Estimation des quantités d’ammonium et de bases cationiques mobilisées à partir de dix sols forestiers wallons, suite à des apports croissants d’acide. In Vérification de la Pertinence de L’utilisation du Modèle Gibbsitique pour Prédire L’activité en Al3+ Critique. Convention RW-UCL: Estimation des Niveaux et Charges Critiques de Polluants Acidifiants au Niveau des éCosystèmes Forestiers en Région Wallonne; Rapport final; Université catholique de Louvain: Louvain -la-Neuve, Belgium, 2000; 147p. [Google Scholar]
- Tran, A.; André, F.; Craeye, C.; Lambot, S. Near-field or far-field full-wave ground penetrating radar modeling as a function of the antenna height above a planar layered medium. Prog. Electromagn. Res. 2013, 141, 415–430. [Google Scholar] [CrossRef]
- Lambot, S.; André, F. Full-wave modeling of near-field radar data for planar layered media reconstruction. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2295–2303. [Google Scholar] [CrossRef]
- Michalski, K.A.; Mosig, J.R. Multilayered media Green’s functions in integral equation formulations. IEEE Trans. Antennas Propag. 1997, 45, 508–519. [Google Scholar] [CrossRef]
- Slob, E.C.; Fokkema, J. Coupling effects of two electric dipoles on an interface. Radio Sci. 2002, 37, 1073. [Google Scholar] [CrossRef]
- Lambot, S.; Slob, E.; Vereecken, H. Fast evaluation of zero-offset Green’s function for layered media with application to ground-penetrating radar. Geophys. Res. Lett. 2007, 34, L21405. [Google Scholar] [CrossRef]
- Lambot, S.; Antoine, M.; Vanclooster, M.; Slob, E.C. Effect of soil roughness on the inversion of off-ground monostatic GPR signal for noninvasive quantification of soil properties. Water Resour. Res. 2006, 42, W03403. [Google Scholar] [CrossRef]
- Lambot, S.; Weihermüller, L.; Huisman, J.A.; Vereecken, H.; Vanclooster, M.; Slob, E.C. Analysis of air-launched ground-penetrating radar techniques to measure the soil surface water content. Water Resour. Res. 2006, 42, W11403. [Google Scholar] [CrossRef]
- Matysek, D.; Raclavska, H.; Raclavsky, K. Correlation between magnetic susceptibility and heavy metal concentrations in forest soils of the eastern Czech Republic. J. Environ. Eng. Geophys. 2008, 13, 13–26. [Google Scholar] [CrossRef]
- Magiera, T.; Parzentny, H.; Róg, L.; Chybiorz, R.; Wawer, M. Spatial variation of soil magnetic susceptibility in relation to different emission sources in southern Poland. Geoderma 2015, 255–256, 94–103. [Google Scholar] [CrossRef]
- Moré, J. The Levenberg-Marquardt algorithm: Implementation and theory. In Numerical Analysis; Watson, G.A., Ed.; Springer: Berlin/Heidelberg, Germany, 1978; Volume 630, Lecture Notes in Mathematics, Section 10; pp. 105–116. [Google Scholar] [CrossRef]
- Huyer, W.; Neumaier, A. Global optimization by multilevel coordinate search. J. Glob. Optim. 1999, 14, 331–355. [Google Scholar] [CrossRef]
- Lambot, S.; Javaux, M.; Hupet, F.; Vanclooster, M. A global multilevel coordinate search procedure for estimating the unsaturated soil hydraulic properties. Water Resour. Res. 2002, 38, 1224. [Google Scholar] [CrossRef]
- Lambot, S.; Slob, E.C.; van den Bosch, I.; Stockbroeckx, B.; Scheers, B.; Vanclooster, M. Estimating soil electric properties from monostatic ground-penetrating radar signal inversion in the frequency domain. Water Resour. Res. 2004, 40, W04205. [Google Scholar] [CrossRef]
- Janssen, P.H.M.; Heuberger, P.S.C. Calibration of process-oriented models. Ecol. Model. 1995, 83, 55–66. [Google Scholar] [CrossRef]
- Markovsky, I.; Van Huffel, S. Overview of total least-squares methods. Signal Process. 2007, 87, 2283–2302. [Google Scholar] [CrossRef] [Green Version]
- Efron, B.; Tibshirani, R. An Introduction to the Bootstrap; Taylor & Francis Ltd.: Boca Raton, FL, USA, 1994; p. 456. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| f | frequency (Hz) |
| free space wavelength of the incident wave (m) | |
| antenna phase center (m) | |
| complex ratio between the backscattered and the incident electromagnetic fields (−) | |
| global reflection of the radar antenna in free space (−) | |
| global reflection for the field incident from the layered medium onto the field point (−) | |
| global transmission coefficient for the field incident from the VNA reference calibration plane onto the point source (−) | |
| global transmission coefficient for the field incident from the layered medium onto the field point (−) | |
| frequency domain Green’s function, representing the response of the air-subsurface system (−) | |
| time domain Green’s function (−) | |
| transverse electric global reflection coefficient for multilayered medium with smooth surface (−) | |
| transverse magnetic global reflection coefficient for multilayered medium with smooth surface (−) | |
| transverse electric global reflection coefficient for multilayered medium with rough surface (−) | |
| transverse magnetic global reflection coefficient for multilayered medium with rough surface (−) | |
| scattering loss factor (−) | |
| incidence angle (rad) | |
| standard deviation of the litter surface height (m) | |
| height of the radar antenna above litter surface (m) | |
| thickness of the OL litter layer (m) | |
| thickness of the OF litter layer (m) | |
| litter thickness (m) | |
| = for the OL litter configuration (see Figure 1a) | |
| = for the OF litter configuration (see Figure 1b) | |
| = + for the OL-OF litter configuration (see Figure 1c) | |
| air layer electrical conductivity, set to 0 Sm | |
| OL litter layer electrical conductivity at 0.8 GHz, set to 0 Sm | |
| OF litter layer electrical conductivity at 0.8 GHz, set to 0 Sm | |
| A horizon electrical conductivity, set to 0 Sm | |
| air layer relative dielectric permittivity, set to 1 (−) | |
| OL litter layer relative dielectric permittivity (−) | |
| OF litter layer relative dielectric permittivity (−) | |
| A horizon relative dielectric permittivity (−) | |
| linear variation rate of OL litter layer effective electrical conductivity with frequency (SHzm) | |
| linear variation rate of OF litter layer effective electrical conductivity with frequency (SHzm) |
| Parameter | Paired t-Test | a | b (m) | c (p-Value) | Total Least Squares Regression | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| -Ratio (-Value) | Intercept [CI95] d | Slope [CI95] d | ||||||||
| All Data | ||||||||||
| −0.098 | (0.923) | −0.0004 | 0.009 | 0.585 | (0.005) | −0.006 | [−0.028; 0.017] | 1.10 | [0.26; 1.82] | |
| −0.094 | (0.926) | −0.0010 | 0.017 | 0.630 | (0.002) | 0.009 | [−0.004; 0.022] | 0.59 | [0.26; 0.89] | |
| = + | −0.137 | (0.892) | −0.0027 | 0.020 | 0.740 | (0.001) | 0.010 | [−0.010; 0.033] | 0.69 | [0.37; 0.99] |
| + 1.96 × | 0.006 | (0.996) | −0.0001 | 0.016 | 0.760 | (0.001) | 0.013 | [−0.007; 0.039] | 0.80 | [0.45; 1.10] |
| Restricted Data Set | ||||||||||
| −0.100 | (0.922) | −0.0003 | 0.008 | 0.352 | (0.139) | −0.013 | [−0.072; 0.035] | 1.38 | [−0.43; 3.55] | |
| −0.076 | (0.940) | −0.0007 | 0.015 | 0.628 | (0.004) | 0.008 | [−0.008; 0.020] | 0.66 | [0.31; 1.01] | |
| = + | −0.132 | (0.896) | −0.0020 | 0.016 | 0.709 | (0.001) | 0.005 | [−0.017; 0.027] | 0.80 | [0.46; 1.12] |
| + 1.96 × | −0.029 | (0.977) | 0.0005 | 0.014 | 0.737 | (0.001) | 0.007 | [−0.014; 0.032] | 0.92 | [0.56; 1.24] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
André, F.; Jonard, F.; Jonard, M.; Vereecken, H.; Lambot, S. Accounting for Surface Roughness Scattering in the Characterization of Forest Litter with Ground-Penetrating Radar. Remote Sens. 2019, 11, 828. https://doi.org/10.3390/rs11070828
André F, Jonard F, Jonard M, Vereecken H, Lambot S. Accounting for Surface Roughness Scattering in the Characterization of Forest Litter with Ground-Penetrating Radar. Remote Sensing. 2019; 11(7):828. https://doi.org/10.3390/rs11070828
Chicago/Turabian StyleAndré, Frédéric, François Jonard, Mathieu Jonard, Harry Vereecken, and Sébastien Lambot. 2019. "Accounting for Surface Roughness Scattering in the Characterization of Forest Litter with Ground-Penetrating Radar" Remote Sensing 11, no. 7: 828. https://doi.org/10.3390/rs11070828