4.1. Feature Importance Analysis and Classification
We aimed to explore the most important and uncorrelated ALS intensity features for the classification of individual segments. Nearly half of the most important intensity features, nominated by RF, were observed to be highly correlated (
r ≥ 80%) or were repeatedly selected to separate classes from each other. This correlation issue was also documented by Shi et al. [
37], where 60% of their ALS features had high correlation (
r > 70%). I
min, middle, and upper intensity percentiles (I
50, I
55, I
65, and I
75) were most useful for leaf-on datasets (
Table 5). Mean and high intensity percentile values were shown to provide the most information for species classification by Shi et al. [
37] and Axelsson et al. [
38], respectively.
Using MCI data improved the OA of classification by approximately 10% and 33% in leaf-off and leaf-on conditions for all C
th compared to SCI-Ch1 and SCI-Ch2, which proves our hypothesis about the ability of mALS features in classification. For example, the OA of 94.57% was obtained in leaf-off MCI data with C
th 0.6 and 0.8 m, and was 84.78% and 81.52% when using only SCI-Ch1 and SCI-Ch2, respectively (
Table 6). Our findings demonstrated the advantage of the combined use of MCI features over SCI-Ch1 and SCI-Ch2 in classifying seedlings. Many other studies reported similar results but in mature forests [
31,
36,
38,
39,
40]. To the best of our knowledge, mALS data have not been used to characterize seedling stands; hence, here we compared our findings with those of similar studies in mature forests. For example, Yu et al. [
31] used mALS data to classify Scots pine, Norway spruce, and birch within 22 sample plots (32 × 32 m) containing 1903 mature trees, and achieved better accuracy (OA = 86%) using MCI features. Notably, OA is affected by other factors such as species composition, stand structure, age, and method of selecting best features, which differed among the various studies. Moreover, the intensity of laser returns was not calibrated in the present study, firstly because the question of whether intensity correction can improve the results could be a future topic of investigation, and secondly, because the use of MCI features in this study was intended to serve to eliminate possible variations in intensity.
Comparing SCI-Ch2 and SCI-Ch1 in the leaf-on condition, our findings showed more accurate OA when using SCI-Ch2 (OA of 69.47% with Cth of 0.2 m), which could be due to the higher reflectance of vegetation in the NIR wavelength in the leaf-on condition.
The combined use of MCI features resulted in more accurate classification results. The most accurate classification yielded a mean precision of 0.93 using leaf-off MCI features with Cth values of 0.6 and 0.8 m, which was comparable with mean precision of 0.87 [
14] and 0.81 [
11]. Feduck and Mcdermid [
14] used leaf-off UAV-RGB imagery to detect coniferous seedlings from nonseedling objects in harvested and replanted stands using a three-step object-based method, and Fromm et al. [
11] used leaf-off and leaf-on UAV-RGB imagery to detect coniferous seedlings using a faster region-CNN. As we classified segments into more classes (Norway spruce, birch, and nontrees) than the two aforementioned studies, the fact that we obtained higher accuracies emphasizes the ability of the input data and method used in our study. Notably, the field measured seedlings in the other studies were different from ours in terms of number and size.
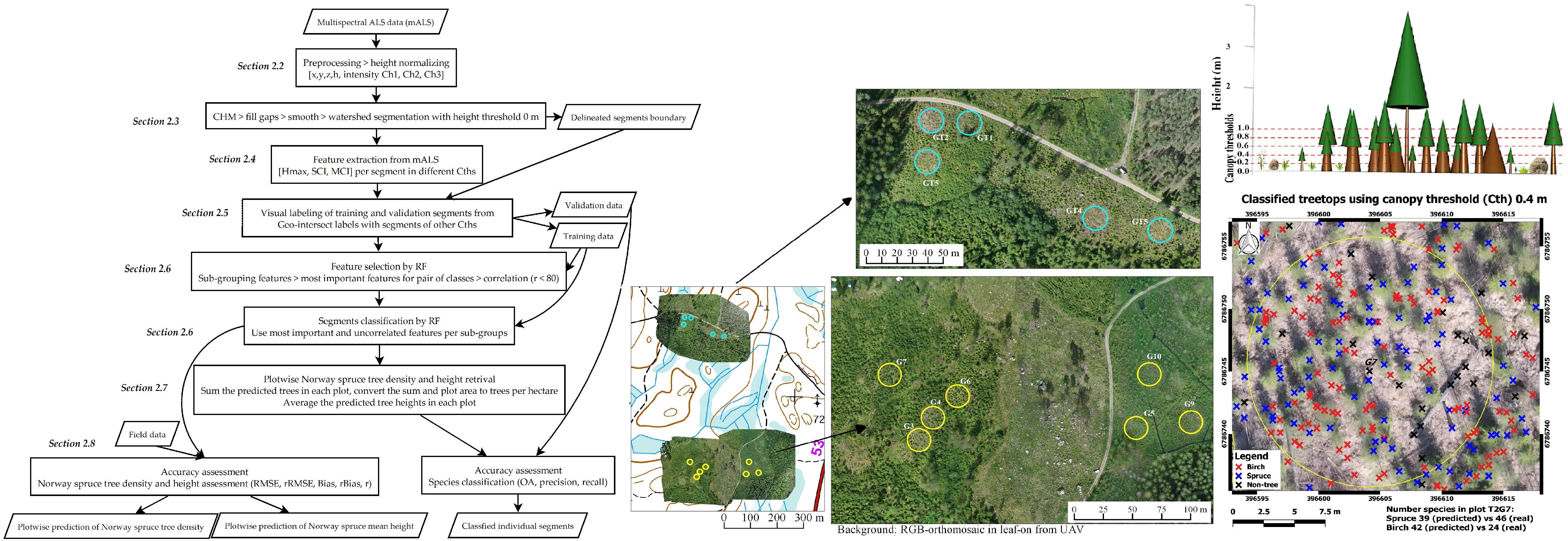
According to our findings, increasing Cth improved the accuracy of classification, which could be due to minimizing the effect of ground returns and removing low-height segments. This was clearly observed, as the Cth of 0 m yielded the worst results. Increasing Cth above 1 m also led to the omission of shorter seedlings; thus, we focused on optimizing Cth between 0 and 1 m.
The OA obtained with SCI-Ch1 and SCI-Ch2 when using the highest C
th (1 m) in leaf-off condition were 87.36% and 82.76%, respectively, whereas a higher OA of 83.70% was already achieved when using MCI with the lowest C
th (0 m;
Table 6). A similar pattern was observed in the leaf-on condition. We concluded that using mALS makes it possible to perform detections with a smaller C
th compared to both SCI-Ch1 and SCI-Ch2, due to the higher efficiency of mALS compared to SCI-Ch1 and SCI-Ch2 in the classification of vegetation. mALS demonstrated more reliable potential for classification compared to both SCI-Ch1 and SCI-Ch2 in characterizations of small seedlings.
4.2. Tree Density Estimation
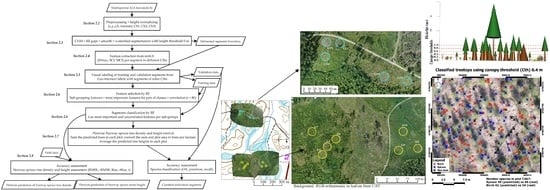
Dense point clouds from ALS, processed with the ITD method, produced accurate density estimates of the seedling stands. The tree density of Norway spruce seedlings was most accurately predicted in leaf-off data using a Cth 0.4 m (rRMSE: 37.9%). Our results also showed that mALS data outperformed in leaf-off compared to leaf-on for tree density estimation of Norway spruce seedlings.
The ITD method (watershed segmentation) was used to detect tree crowns in this study, which, to the best of our knowledge, has not yet been employed in characterizing seedling stands using ALS data. Two similar studies in seedling stands using ALS data with the ABA method in tree density estimation of seedling stands reported rRMSE values of 53.4% and 42%, respectively [
9,
27]. The improvement in accuracy achieved in this study could be firstly attributed to the use of the ITD method; secondly, the higher point density (~57 points/m
2) used in this work compared to those of approximately 5 and 1.2 points/m
2 applied in the two other studies, respectively, would be expected to improve the estimates. Therefore, dense point clouds from mALS can also enhance tree detection in seedling stands. Notably, the increase in accuracy in leaf-off conditions can be attributed to the higher point density (60.10 points/m
2) than in leaf-on (57.17 points/m
2).
Another seedling stands study at the stand level used low-density (~0.7 points/m
2), single-channel ALS with the ABA method and predicted the total tree density with an rRMSE of 47% [
26]. According to Puliti et al. [
9], a decrease in RMSE occurs when plot-level estimates are scaled to the stand level. Korhonen et al. [
29] reported that using stand-level ABA with ALS usually results in higher accuracy than plot-level estimates, because random errors cancel each other out. Therefore, as our tree density estimation was at the plot level, the achieved rRMSE of 37.9% compared to the rRMSE of 47% obtained in the study of Ørka et al. [
26] at the stand level further endorses the capability of the dense mALS data processed with the ITD method in this study. Our method also pursues plot-level estimations because more dense ALS data are becoming available.
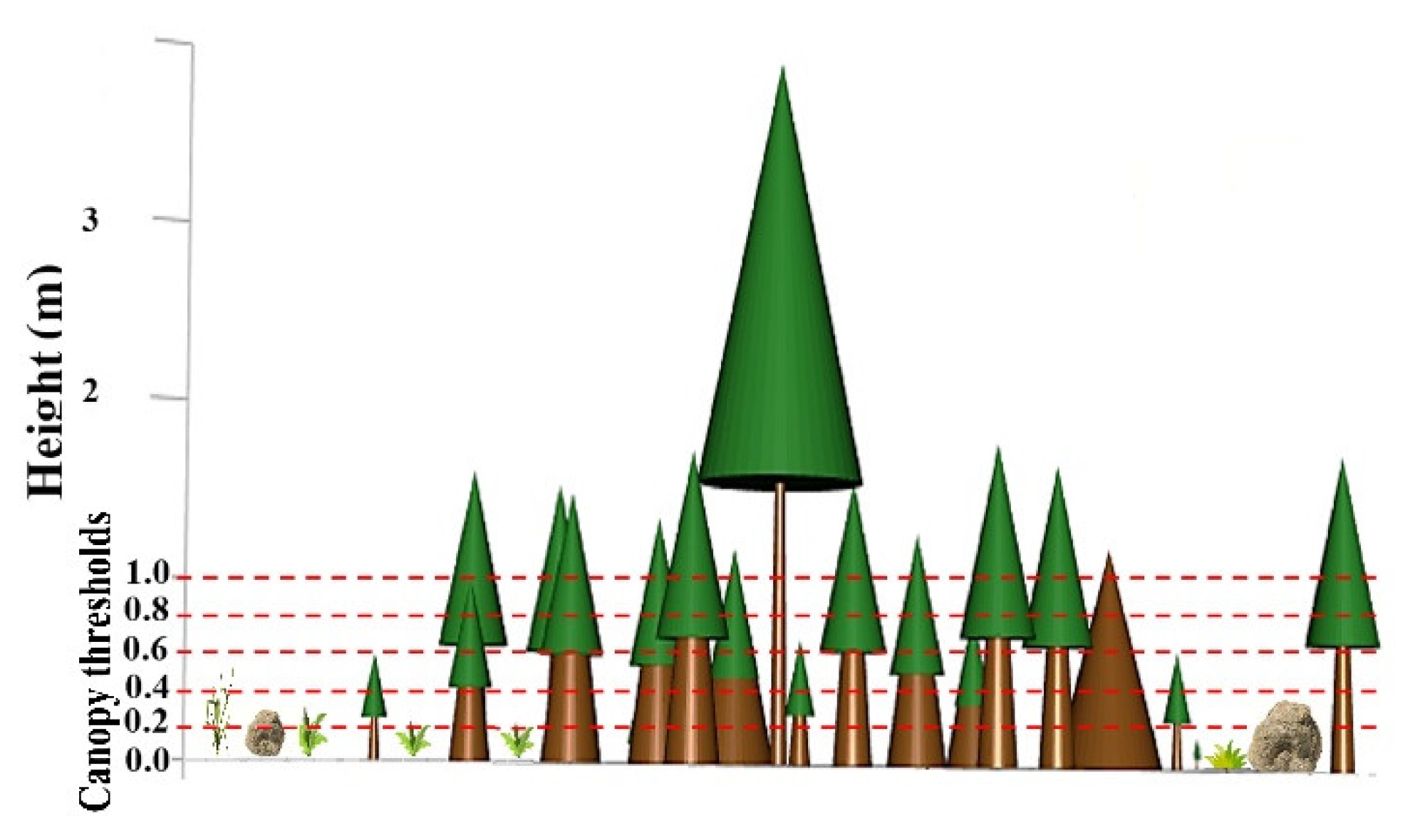
Tree density estimation was more accurately predicted in AdS than YoS (
Table 7), potentially because the shortest tree in AdS (minimum height of 1.57 m) was above the highest C
th (1 m) used. Therefore, theoretically, selecting any C
th (0–1 m), no trees were cut out in AdS for the classification phase, because all trees were already above 1 m. The situation was different in YoS, where the tree height ranged from 0.73 to 1.87 m, overlapping the C
th range and allowing the change in C
th to affect the tree density estimation by omitting trees shorter than the applied C
th (
Table 1).
The sharp treetops in both YoS and AdS lowered the chance of being hit by the laser. In YoS, however, the treetops fell within the range of the applied Cth, whereas in AdS, the treetops were already above all the Cth values, which caused the omission of treetops to be more influential in YoS, resulting in higher underestimation of tree density as Cth increased. Note that when Cth was smaller, overestimation was observed. Therefore, according to our Cth optimization, the most accurate tree density in YoS was obtained with a Cth of 0.4 m (rRMSE: 46.49% and rBias: −28.78%). In AdS, however, 1 m was the optimum Cth both in leaf-off and leaf-on conditions (rRMSE 6.23% and 18.33%, respectively). Therefore, applying a Cth of 1 m is recommended for seedling stands with minimum height above 1.5 m, as supported by our results for AdS.
Our tree density estimation in AdS and YoS outperformed the values reported by Imangholiloo et al. [
7], who used the same ITD method as ours and UAV-PPC and hyperspectral data. They reported rRMSE values of 19.2% and 58.2% for AdS and YoS in leaf-on data, respectively. In this study, we obtained an rRMSE of 6.23% with a C
th of 1.0 m for AdS, and an rRMSE of 46.49% in YoS with a C
th of 0.4 m, both in leaf-off. The better results in this research may be due to the dense point clouds and the penetration of ALS inside the canopy, especially in dense plots.
In our characterizations of seedling stands, we achieved almost the same rRMSE using ALS as studies using UAVs. For example, Puliti et al. [
9] and Imangholiloo et al. [
7] reported rRMSE values of 36.3% and 38.1% using ABA and ITD methods, respectively. Reaching the same accuracy (rRMSE 37.9% in leaf-off, C
th 0.4 m) reflects the superior ability of ALS, i.e., it provides advantages in penetrating the canopy, and is independent of direct sunlight, clear sky, and the ITD method used in our study.
In this study, we assessed the effect of different C
th values. The results of C
th optimization suggested C
th values of 0.4 and 1.0 m for YoS and AdS, respectively, to estimate tree density. These values are almost equal with the selected C
th values of 0.5 and 1.0 m for YoS and AdS, respectively, in the UAV study of Imangholiloo et al. [
7]. We also found a C
th of 0.4 m to be the optimum C
th for all plots, which was the same as that obtained in the ALS study by Korpela et al. [
39], who selected a C
th of 0.4 m after testing C
th in the range of 0.1 to 0.5 m. Ørka et al. [
26] also used three C
th values of 0, 0.5, and 1.0 m, employing ALS to predict tree density in regeneration forests. They achieved the most accurate tree density estimation using a 0.5 m C
th.
In our study, misclassification of nontrees (especially bushes and grasses) as Norway spruces also affected the tree density estimation. For instance, with a Cth of 0.4 m, the leaf-off data commissions (precision) of birch, Norway spruce, and nontree classes were 0.89%, 1.00%, and 0.67%, respectively (results not shown). Carefully checking the confusion matrix of the data, in the validation data (92 segments), all Norway spruces (58) were correctly classified; however, one nontree and one birch segment were misclassified as Norway spruce, leading to overestimation of Norway spruce tree density (rBias: −23.44%).
4.3. Tree Height Estimation
Dense point clouds from mALS analyzed with ITD methods produced highly accurate height estimation in seedling stands. The height of Norway spruce was most accurately predicted in leaf-on data using a Cth of 0.2 m (rRMSE: 10.76%). The novel use of leaf-off and leaf-on mALS data in seedling stands demonstrated that leaf-on data outperformed leaf-off data for tree height estimation of Norway spruce seedlings.
A few studies have assessed trees height in seedling stands using ALS data with ABA methods. The heights of seedling stands were reported with rRMSEs of 28% [
26] and 32.0% [
9] at the stand and plot levels, respectively. The improvement in height estimation accuracy achieved in this study could mainly be attributed to the higher point density (~57 points/m
2) used in our research compared to the point density of approximately 0.7 and 5 points/m
2 applied in the two others, respectively. Therefore, dense point clouds from ALS also enhance the tree height estimation in seedling stands studies. In addition to the dense point clouds used, the difference could also be due to the ITD method used in this study.
The tree height was underestimated by 6.88% in leaf-on data with a C
th of 0.2 m. Korpela et al. [
28] also used the ITD method with leaf-on ALS and aerial imagery in seedling stands, and obtained underestimations of tree height of between 20% and 40%. Their study area was more complex (i.e., higher tree density and classification classes) than that in this study. The point density of 57.17 points/m
2 used in this study was higher than theirs, i.e., 6–9 points/m
2, and they used spectral data from aerial images instead of our use of intensity data from mALS.
Two similar studies, Vepakomma et al. [
8] and Imangholiloo et al. [
7], using the ITD method and UAV-PPC data instead of ALS, underestimated height by 0.39 and 0.16 m (6.90%), respectively. Reaching the same accuracy (bias: 0.16 m in leaf-on, C
th 0.2 m) reflects the superior ability of ALS, as it operates independent of direct sunlight and clear sky. Goodbody et al. [
15] and Puliti et al. [
9] applied UAV in seedling studies using OBIA and ABA methods, achieving an RMSE of 0.92 m and an rRMSE of 30.9%, respectively. The improvement (RMSE: 0.25 m and rRMSE: 10.76% in leaf-on, C
th 0.2 m) could be due to the ITD method and the dense point clouds used in this study.
In terms of optimum C
th for tree height estimation, the C
th values of 0.2 m, and 0.2, and 0.6 m were found to be optimal for YoS and AdS, respectively. These values are lower than the 0.5 and 1.0 m C
th values for YoS and AdS, respectively, selected by Imangholiloo et al. [
7]. Similarly, in terms of optimum C
th among all plots, the C
th of 0.2 m in this study was lower than the 0.4 m used by Korpela et al. [
28]. The lower C
th could be due to the remaining (correctly classified) tall spruces, thereby increasing the mean plot height. Ørka et al. [
26] used three C
th values of 0, 0.5, and 1.0 m for ALS point clouds to predict tree-height-related attributes in regeneration forests. They achieved the most accurate height estimation with a C
th of 0 m, which is close to the C
th value of 0.2 m in our study.
Another factor potentially influencing height estimation is the accuracy of Näslund’s model in predicting heights of field data, as well as the accuracy of the DTM used for the height normalization of ALS point clouds. If tree height is measured at the individual tree level during field surveys, Näslund’s model would not be needed and the ALS-estimated tree heights could be assessed at the individual tree and plot levels. More important than the previously mentioned factors, possible tree height growth between leaf-off ALS data acquisitions and field data collection (time lag was about 45 days) could have caused the higher underestimation of height in leaf-off than in leaf-on conditions.
Another issue in the tree height estimations of YoS was their higher vulnerability to the influence of DTM errors compared to AdS. When height normalization of point clouds was conducted, we assumed that errors affected over- or under- estimations of YoS heights more than for AdS. To illustrate, if DTM has a 20 cm error, for example, its proportional error to a tree with a height of 1 m (20%) would be higher than for a tree with a height of 20 m (1%). As a result, the error in DTM for height normalization can influence tree density estimation, especially for YoS. This consequently affects height estimation, because trees are relatively smaller in YoS than AdS; hence, the error in the DTM influences the estimation proportional to their short height more significantly.

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}