
Profiling the Planetary Boundary Layer Wind with a StreamLine XR Doppler LiDAR: Comparison to In-Situ Observations and WRF Model Simulations
 , ,
, ,
Abstract
:1. Introduction
- The campaign involves the simultaneous operation of several independent technologies. Beside the Doppler LiDAR itself, a tethered balloon, a multilevel 100 m meteorological mast and radiosonde measurements were used. This significantly enhances the evaluation of the LiDAR performance.
- Past in-situ measurements for the evaluation of LiDAR performance of high altitudes were based solely on radiosondes, which have limitations in terms of temporal and spatial continuity and coverage. Here, for the first time, continuous in-situ wind measurements, supported by a tethered balloon, are used for the evaluation of high-altitude LiDAR performance.
- A downside of this approach is the relatively short time period, and hence narrow range of atmospheric conditions, covered in this campaign. This results from the high cost and technical difficulty involved in operating a tethered balloon system for long time periods. Nevertheless, it should be noted that the synoptic conditions prevailing during the short campaign period represents the summer season in Israel which enables extending our conclusions to a complete seasonal period. This point will be further discussed in the method section.
- Extracting horizontal wind components from LiDAR measurements involves applying scans with a certain elevation angle. Choosing the appropriate angle is important. On one hand, the larger the angle (LOS closer to zenith), the more realistic is the assumption of horizontal homogeneity. On the other hand, smaller angles allow the radial component, directly measured by the instrument, to include more of the horizontal wind component. Here, this issue is addressed by applying all measurements using two distinct elevation angles of 60° and 80°.
- The measurement technologies applied for the validation of the LiDAR are limited in their spatial coverage. Here, the validation procedure is enhanced by utilizing high resolution wind and temperature fields, produced by the meso-scale numerical weather prediction model WRF, which are compared to the LiDAR measurements.
- A synergetic approach for the simultaneous application of LiDAR measurements and WRF predictions is shown. The LiDAR signal-to-noise ratio (SNR) depends upon the concentration of aerosols in the boundary layer, which can be too low for altitudes above the ABL. Model predictions also involve intrinsic uncertainty. Here, the atmospheric profile is studied using a combination of the two, which allows complementarity.
2. The Field Campaign: Location, Instrumentation and Models
2.1. Halo-Photonics StreamLine XR Doppler LiDAR
2.2. Tethered Balloon
2.3. Meteorological Mast
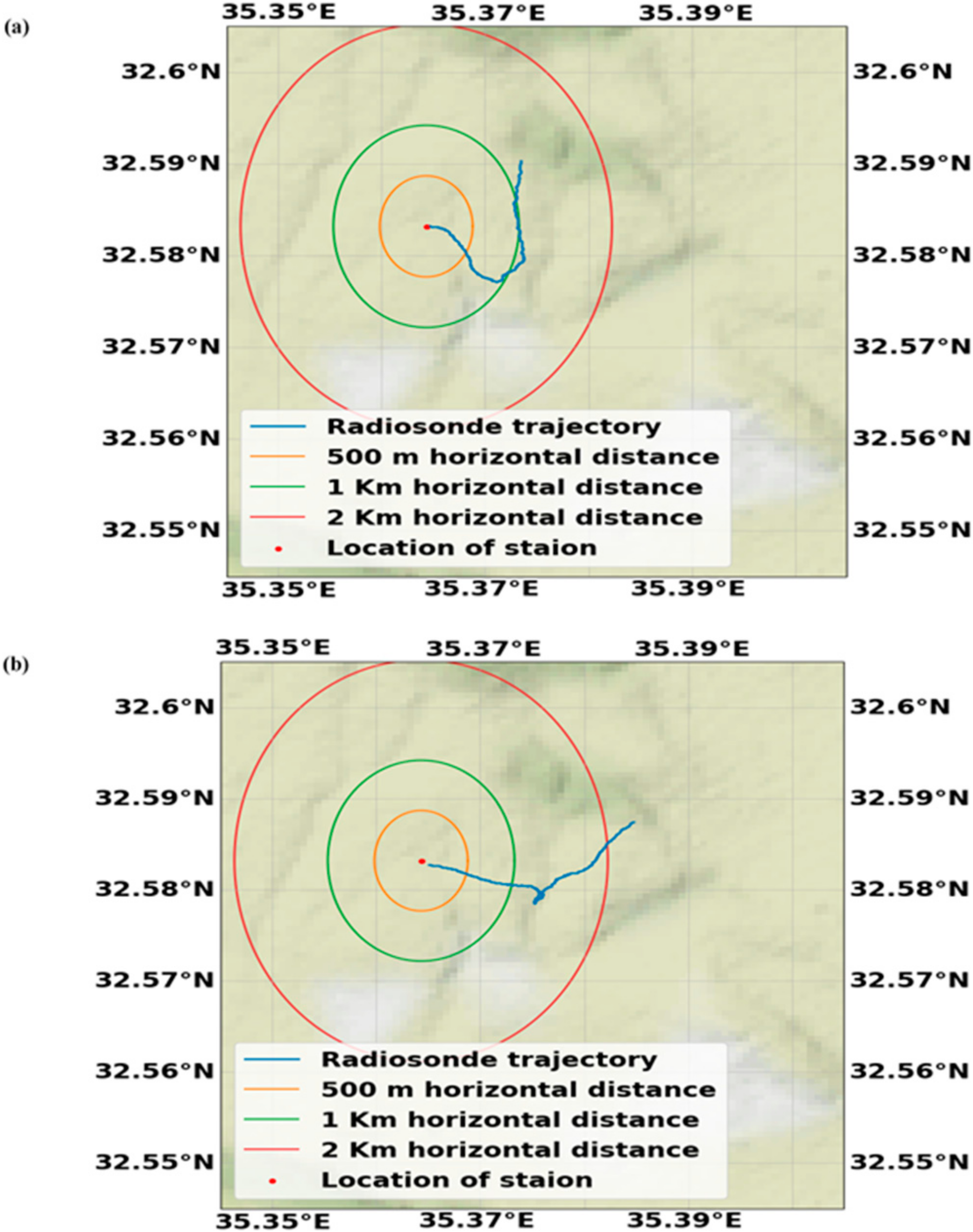
2.4. Radiosondes
2.5. WRF Model
3. Methods
3.1. Comparison of Doppler LiDAR Relative to Other Measurement Techniques
- A DBS scan at 60° with 3 beams and a duration of 14 s. (referred to as “DBS 60”).
- A VAD scan at 60° with 24 beams and a duration of 36 s. (referred to as “VAD 60”).
- A DBS scan at 80° with 3 beams and a duration of 14 s (referred to as “DBS 80”).
- A VAD scan at 80° with 24 beams and a duration of 36 s (referred to as “VAD 80”).
- A VAD scan at 75° with 6 beams and a duration of 6 s.
- A stare scan at 90° and processing with a duration of ~1:30 min.
3.2. ABL Structure Analysis
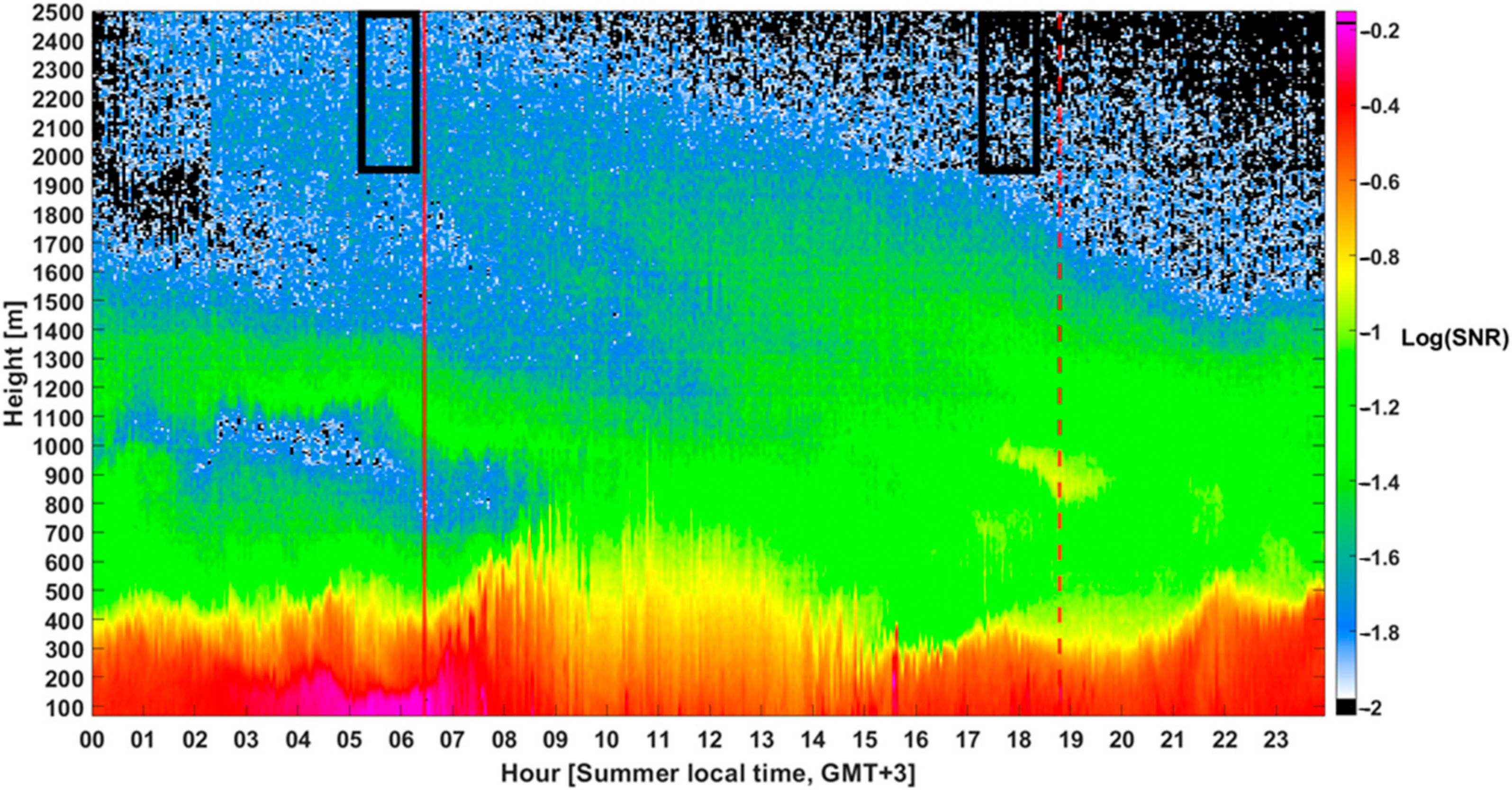
- The distribution of PM concentration along the vertical profile indicates the ML depth. The boundary between the ML and the free atmosphere aloft is typically noticeable as a transition zone in which a relatively large negative vertical gradient in the PM concentration prevails [46]. Above this transition zone, the PM concentration is considerably lower than below it. Multiple algorithms have been proposed to quantitatively detect and extract the MLH from attenuated backscatter data [47]. Here, we use the wavelet method [14,15,46,48] applying convolution of Haar function over the attenuated backscatter profile. This results in a function in which sharp negative (positive) gradients are expressed as peaks (deeps). The position of these peaks indicates the center of the transition zone, their magnitude is associated with the gradient strength, and their width indicates the depth of the transition zone. When multiple peaks are detected, the strongest magnitude of the two is selected. The top limit of the transition zone is defined as the MLH.
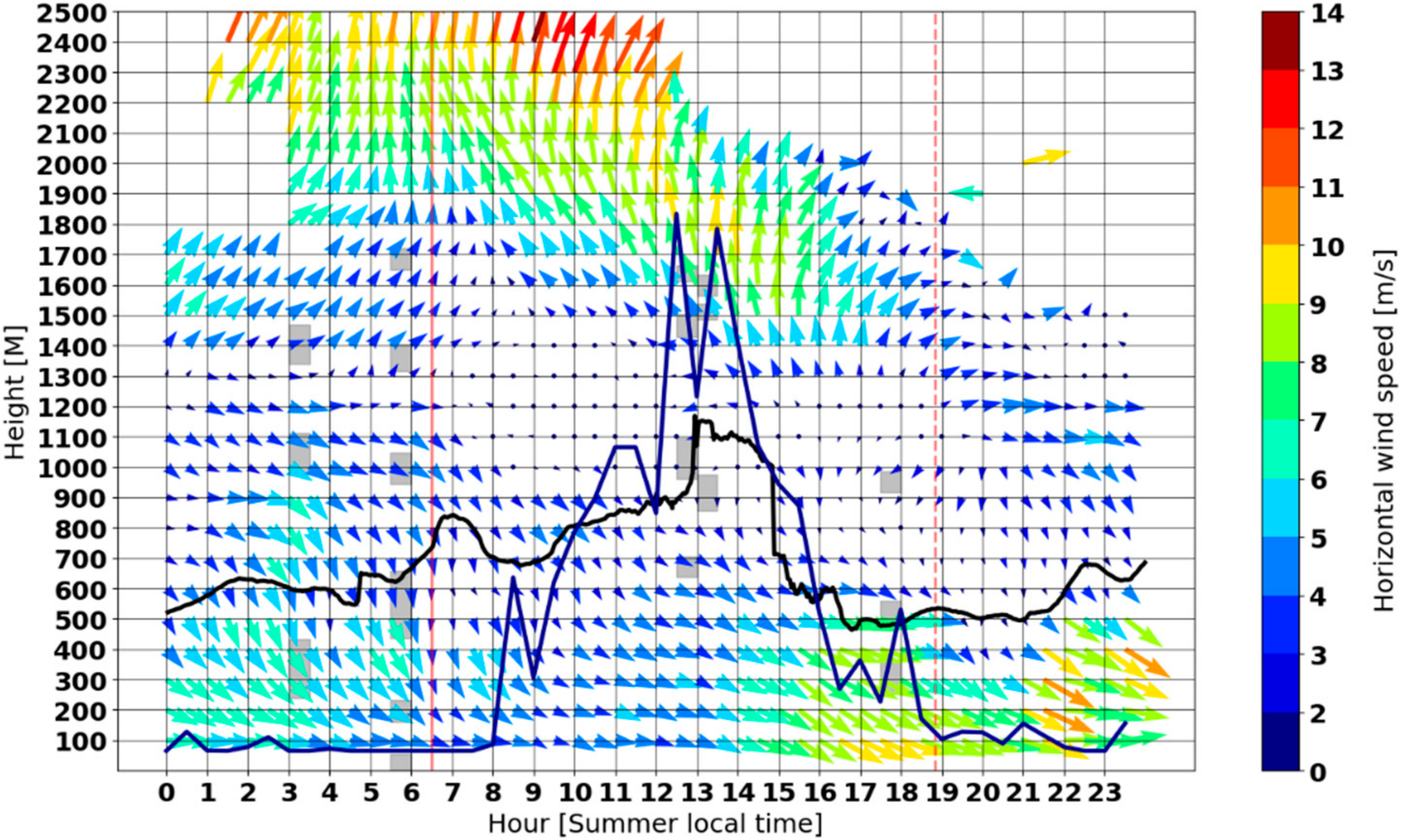
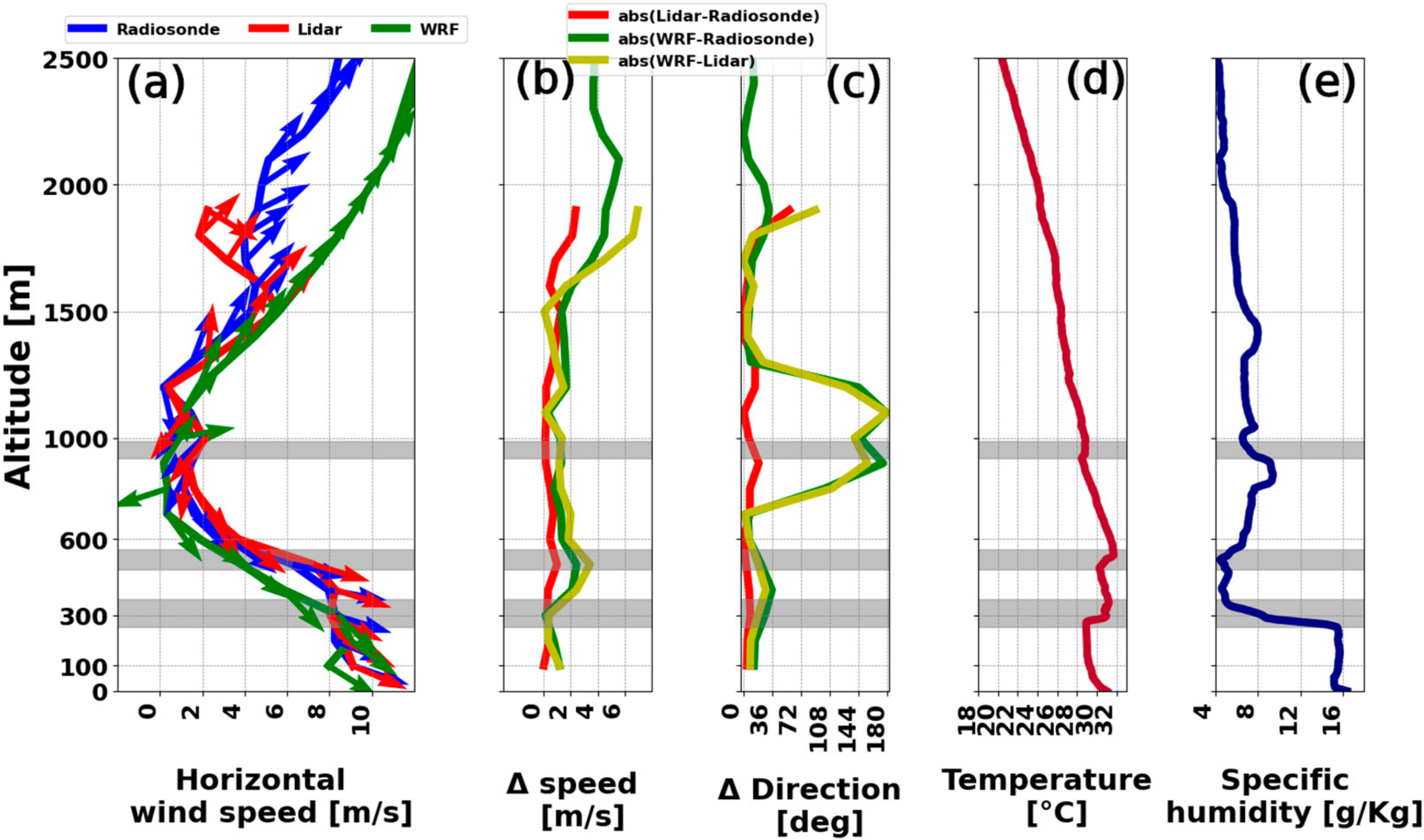
- Temperature inversions can be indirectly identified from LiDAR horizontal wind measurements. The inhibition of vertical turbulent momentum transfer, associated with an inversion layer, may allow strong direction and speed gradients.
4. Results
4.1. Statistical Cross-Validation of LiDAR Observations
4.2. Spatial Uniformity
4.3. Boundary Layer Structure Analysis
5. Conclusions
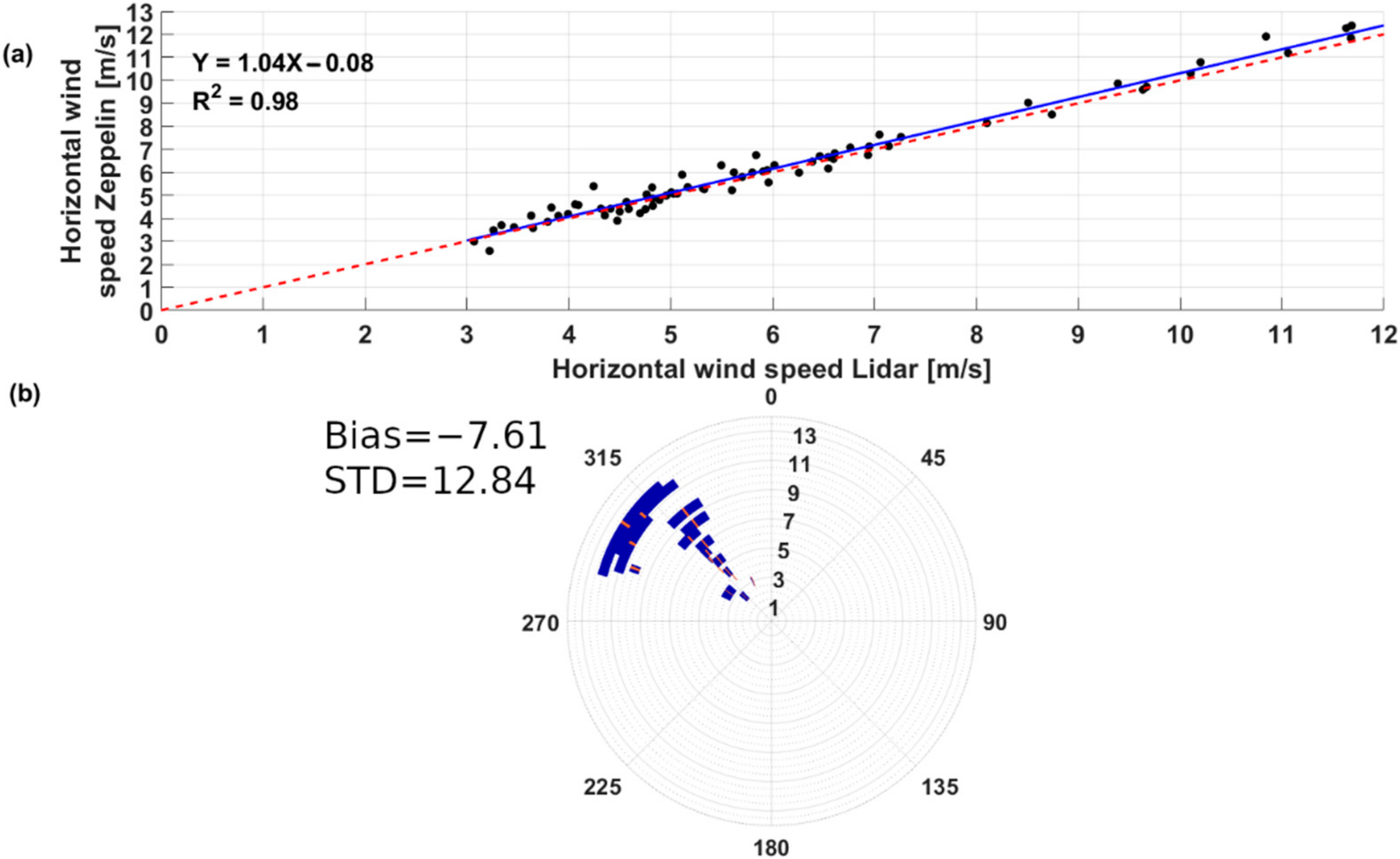
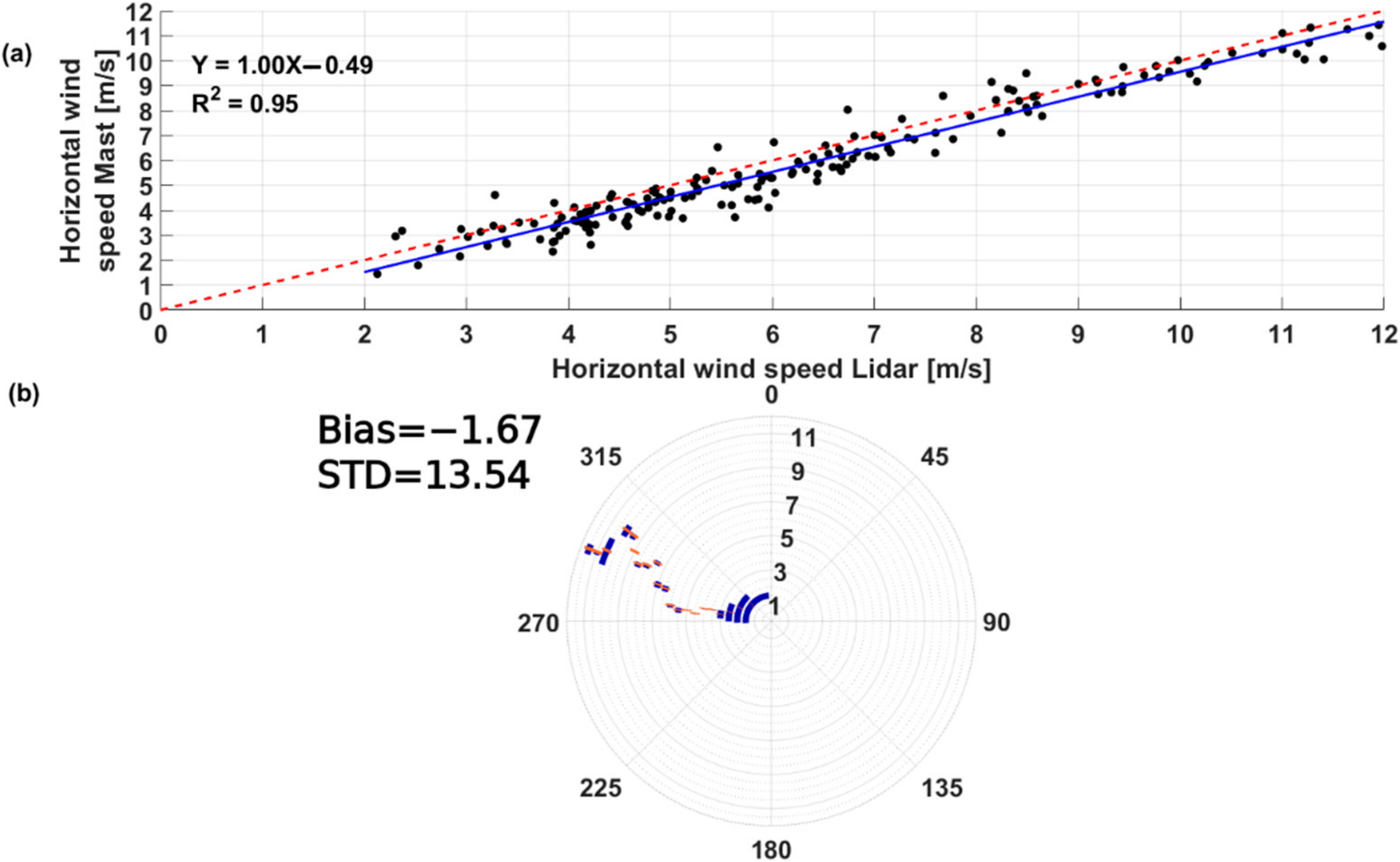
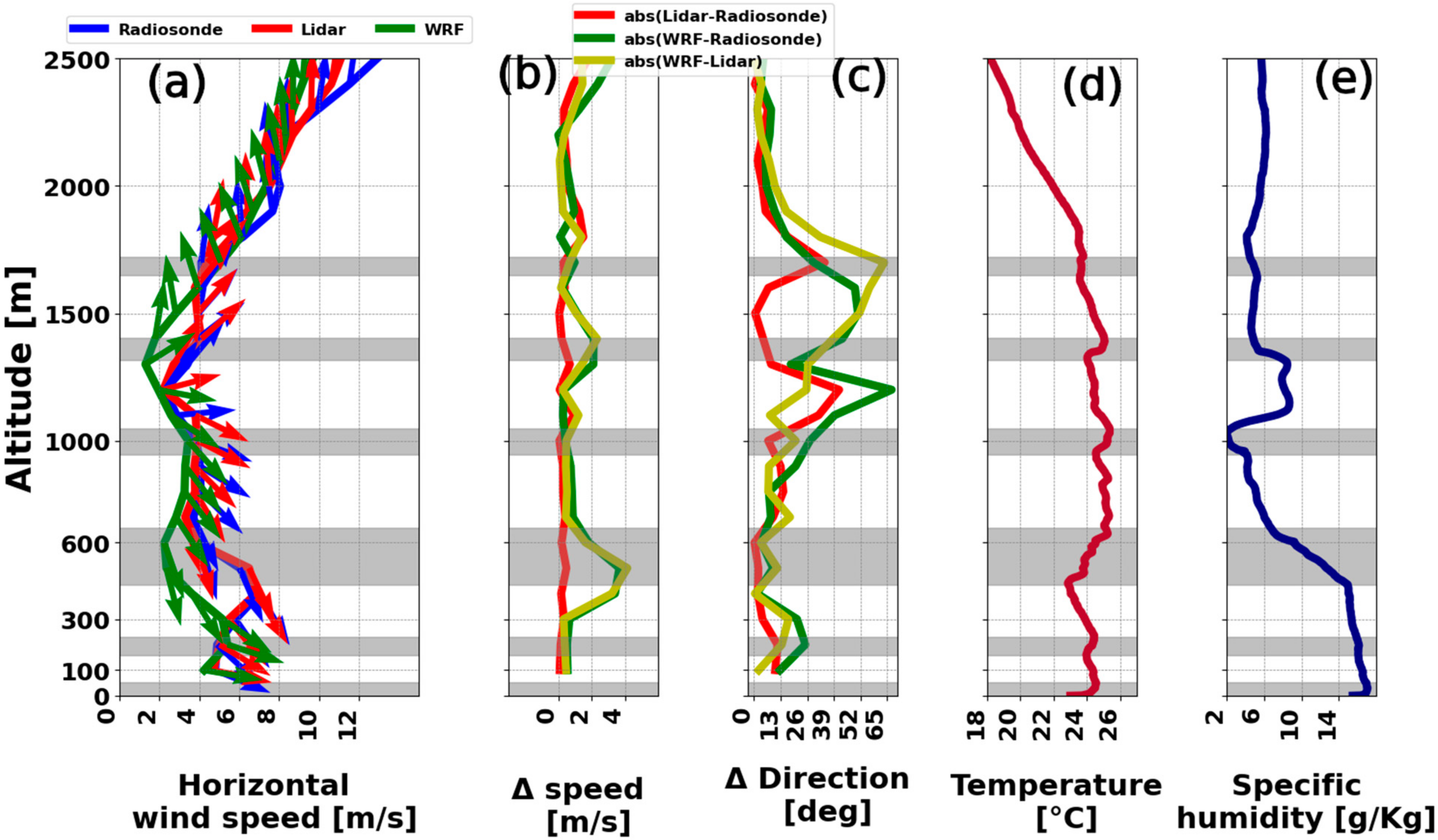
- VAD scans slightly outperformed DBS results for high altitudes (tetheresonde data), which is most probably because of the more detailed data comprising a single scan which includes 24 beams, compared to three beams for DBS. For low altitudes (mast data), DBS scans yield slightly better R2 values. This can be attributed to faster changes in lower altitudes which may require faster scans.
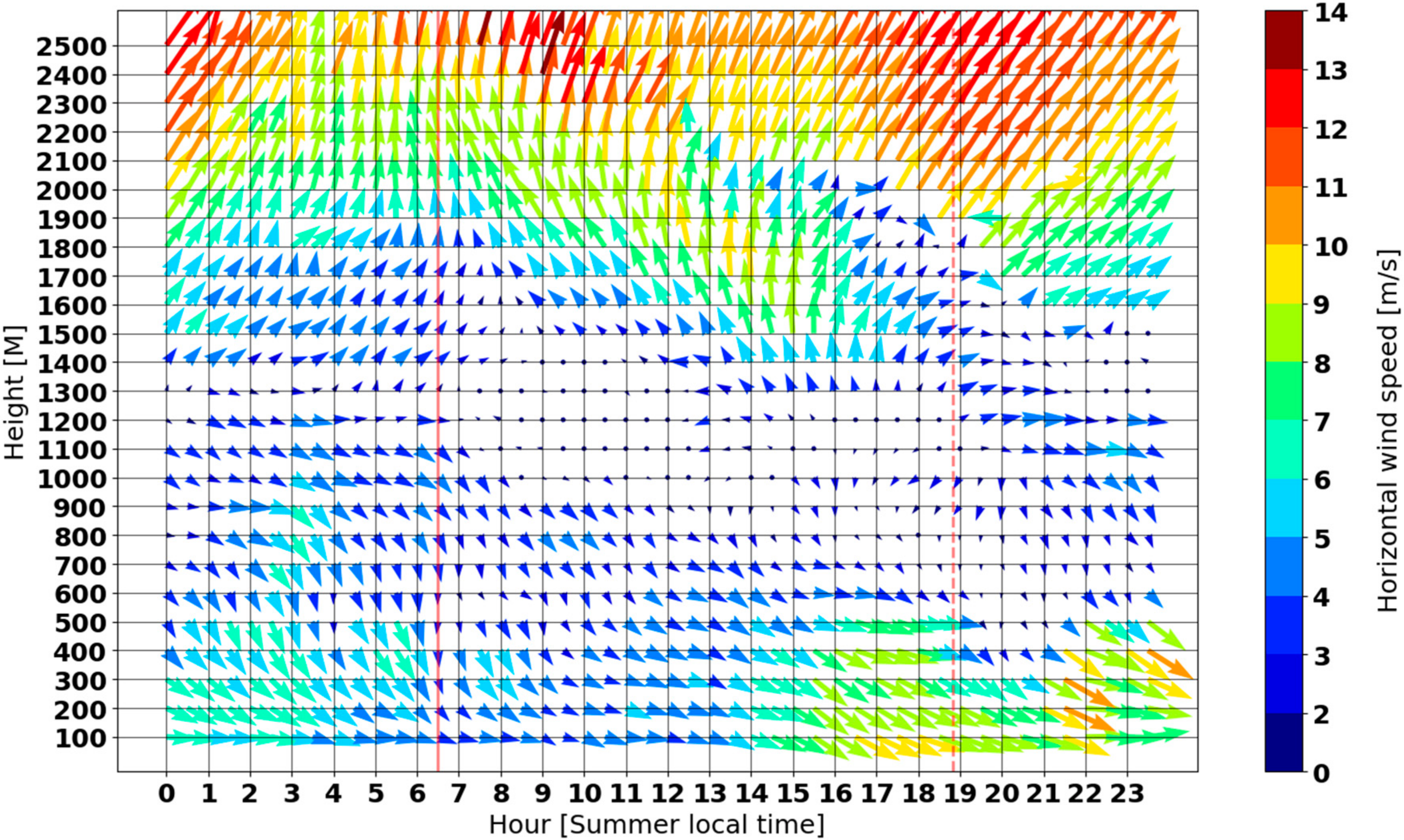
- Although spanning a wider area with potential spatial variability, scans with 60° elevation of the LiDAR are advantageous in comparison with 80° scans. This stems from the decrease of vertical wind component presence in the measured signal, combined with the fact the vertical component exhibits enhanced spatial variability, especially in daytime conditions.
- Information regarding the existence of MLH and temperature inversions can be obtained through the analysis of backscatter signals and vertical wind standard deviation. For some cases, the existence of temperature inversion layers higher than the MLH can be indirectly detected through gradients in the horizontal wind profile.
- Synergic use of WRF simulations and LiDAR observations is utilized with low SNR LiDAR data replaced by model data.
- In some cases, there is discrepancy between forecasted and observed wind speeds originating from discrepancies in the prediction of inversion layer height.
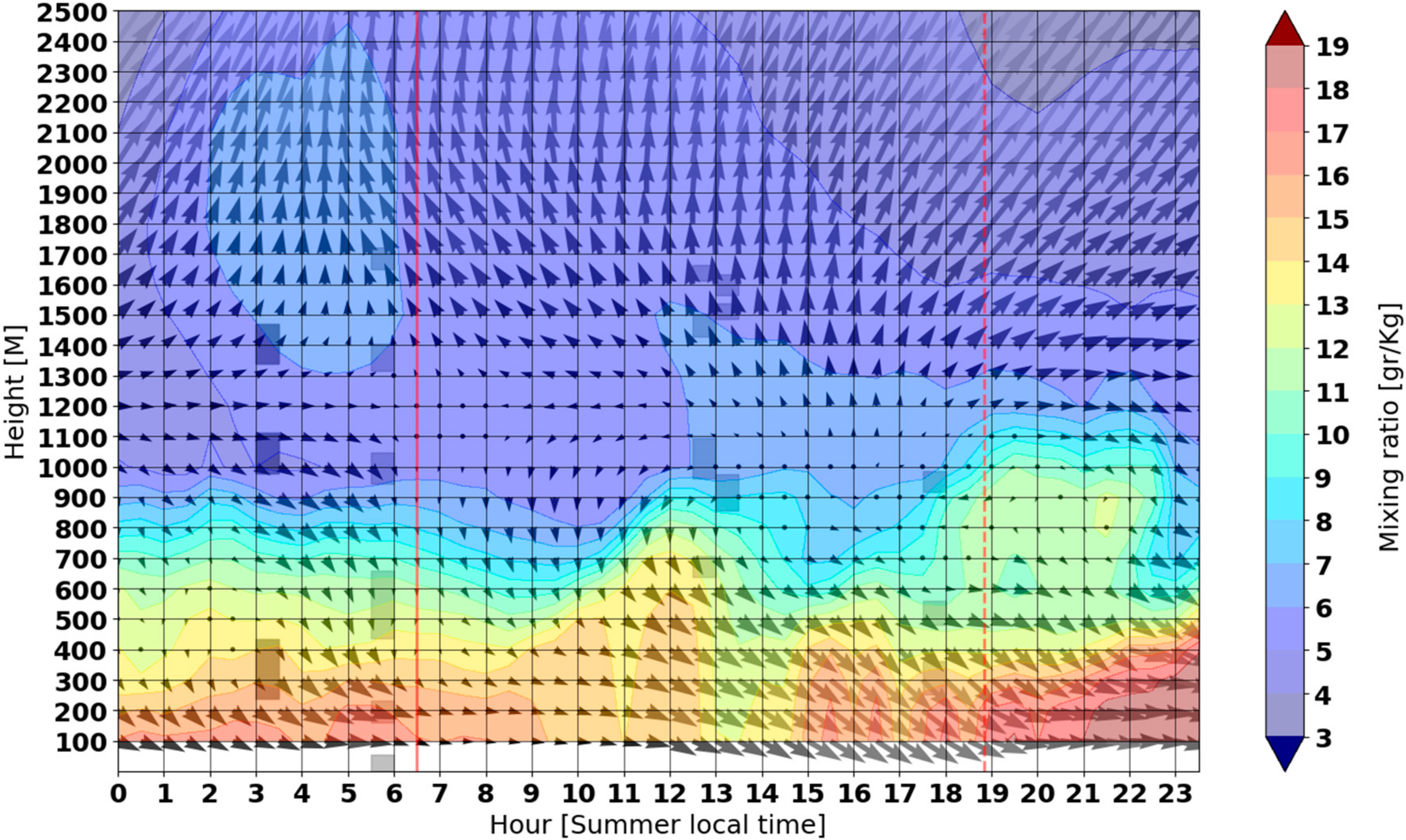
- Data from standard regional weather prediction models forecasting temperature and mixing ratio profiles may be used for the pre-assessment of SNR as a function of height.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
Appendix C

References
- Liu, Z.; Barlow, J.F.; Chan, P.W.; Fung, J.C.H.; Li, Y.; Ren, C.; Mak, H.W.L.; Ng, E. A review of progress and applications of pulsed DopplerWind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef]
- Collier, C.G.; Fay, D.; Karen, E.B.; Holt, A.R.; Middleton, D.R.; Pearson, G.N.; Siemen, S.; Willetts, D.V.; Upton, G.J.G.; Young, R.I. Dual-Doppler lidar measurements for improving dispersion models. Bull. Am. Meteorol. Soc. 2005, 86, 825–838. [Google Scholar] [CrossRef]
- Pearson, G.; Davies, F.; Collier, C. An analysis of the performance of the UFAM pulsed Doppler lidar for observing the boundary layer. J. Atmos. Ocean. Technol. 2009, 26, 240–250. [Google Scholar] [CrossRef]
- Wang, Y.; Hocut, C.M.; Hoch, S.W.; Creegan, E.; Fernando, H.J.; Whiteman, C.D.; Felton, M.; Huynh, G. Triple Doppler wind lidar observations during the mountain terrain atmospheric modeling and observations field campaign. J. Appl. Remote Sens. 2016, 10, 26015. [Google Scholar] [CrossRef]
- Thobois, L.; Cariou, J.P.; Gultepe, I. Review of lidar-based applications for aviation weather. Pure Appl. Geophys. 2019, 176, 1959–1976. [Google Scholar] [CrossRef]
- Newsom, R.K.; Brewer, W.A.; Wilczak, J.M.; Wolfe, D.E.; Oncley, S.P.; Lundquist, J.K. Validating precision estimates in horizontal wind measurements from a Doppler lidar. Atmos. Meas. Technol. 2017, 10, 1229–1240. [Google Scholar] [CrossRef]
- Shun, C.M.; Lam, H.K. Remote Sensing of Windshear under Tropical Cyclone Conditions in Hong Kong. In Proceedings of the 35th Session of the Typhoon Committee, Chiang Mai, Thailand, 19–25 November 2002. [Google Scholar]
- Dehghan, A.; Mariani, Z.; Leroyer, S.; Sills, D.; Bélair, S.; Joe, P. Evaluation of Modeled Lake Breezes Using an Enhanced Observational Network in Southern Ontario: Case Studies. J. Appl. Meteorol. Climatol. 2018, 57, 1511–1534. [Google Scholar] [CrossRef]
- Curry, M.; Hanesiak, J.; Kehler, S.; Sills, D.M.; Taylor, N.M. Ground-based observations of the thermodynamic and kinematic properties of lake-breeze fronts in southern Manitoba, Canada. Bound. Layer Meteorol. 2017, 163, 143–159. [Google Scholar] [CrossRef]
- Lemonsu, A.; Bastin, S.; Masson, V.; Drobinski, P. Vertical structure of the urban boundary layer over Marseille under sea-breeze conditions. Bound. Layer Meteorol. 2006, 118, 477–501. [Google Scholar] [CrossRef]
- Berg, L.K.; Newsom, R.K.; Turner, D.D. Year-Long Vertical Velocity Statistics Derived from Doppler Lidar Data for the Continental Convective Boundary Layer. J. Appl. Meteorol. Climatol. 2017, 56, 2441–2454. [Google Scholar] [CrossRef]
- Bonin, T.A.; Choukulkar, A.; Brewer, W.A.; Sandberg, S.P.; Weickmann, A.M.; Pichugina, Y.L.; Banta, R.M.; Oncley, S.P.; Wolfe, D.E. Evaluation of turbulence measurement techniques from a single Doppler lidar. Atmos. Meas. Technol. 2017, 10, 3021–3039. [Google Scholar] [CrossRef]
- Ronen, A.; Tzadok, T.; Rostkier-Edelstein, D.; Agassi, E. Fog measurements with ir whole sky imager and Doppler lidar, combined with in situ instruments. Remote Sens. 2021, 13, 3320. [Google Scholar] [CrossRef]
- Park, S.; Kim, M.H.; Yeo, H.; Shim, K.; Lee, H.J.; Kim, C.H.; Song, C.K.; Park, M.S.; Shimizu, A.; Nishizawa, T.; et al. Determination of mixing layer height from co-located lidar, ceilometer and wind Doppler lidar measurements: Intercomparison and implications for PM2. 5 simulations. Atmos. Pollut. Res. 2022, 13, 101310. [Google Scholar] [CrossRef]
- Schween, J.H.; Hirsikko, A.; Löhnert, U.; Crewell, S. Mixing-layer height retrieval with ceilometer and Doppler lidar: From case studies to long-term assessment. Atmos. Meas. Technol. 2014, 7, 3685–3704. [Google Scholar] [CrossRef]
- Davis, J.C.; Collier, C.G.; Davies, F.; Pearson, G.N.; Burton, R.; Russell, A. Doppler lidar observations of sensible heat flux and intercomparisons with a ground-based energy balance station and WRF model output. Meteorol. Z. 2009, 18, 155–162. [Google Scholar] [CrossRef]
- Bruno, J.H. Evaluating the Weather Research and Forecasting Model Fidelity for Forecasting Lake Breezes. Ph.D. Thesis, Ohio University, Athens, OH, USA, 2019. [Google Scholar]
- Päschke, E.; Leinweber, R.; Lehmann, V. An assessment of the performance of a 1.5 μm Doppler lidar for operational vertical wind profiling based on a 1-year trial. Atmos. Meas. Technol. 2015, 142, 203–221. [Google Scholar] [CrossRef]
- Lane, S.E.; Barlow, J.F.; Wood, C.R. An assessment of a three-beam Doppler lidar wind profiling method for use in urban areas. J. Wind Eng. Ind. Aerodyn. 2013, 119, 53–59. [Google Scholar] [CrossRef]
- Mariani, Z.; Crawford, R.; Casati, B.; Lemay, F. A multi-year evaluation of Doppler lidar wind-profile observations in the Arctic. Remote Sens. 2020, 12, 323. [Google Scholar] [CrossRef]
- Santos, P.A.A.; Sakagami, Y.; Haas, R.; Passos, J.C.; Taves, F.F. Lidar measurements validation under coastal condition. Opt. Pura Apl. 2015, 48, 193–198. [Google Scholar] [CrossRef]
- Araki, R.; Ueda, H.; Ohsawa, T.; Azechi, K.; Komatinovic, N. Offshore wind resource assessment on the west coast of awaji island (comparison between galion doppler lidar and meteorological mast). In Grand Renewable Energy Proceedings Japan Council for Renewable Energy (2018); Japan Council for Renewable Energy: Tokyo, Japan, 2018; p. 175. [Google Scholar]
- Klaas, T.; Pauscher, L.; Callies, D. LiDAR-mast deviations in complex terrain and their simulation using CFD. Meteorol. Z. 2015, 24, 591–603. [Google Scholar] [CrossRef]
- Knoop, S.; Bosveld, F.C.; de Haij, M.J.; Apituley, A. A 2-year intercomparison of continuous-wave focusing wind lidar and tall mast wind measurements at Cabauw. Atmos. Meas. Technol. 2021, 14, 2219–2235. [Google Scholar] [CrossRef]
- Cañadillas, B.; Westerhellweg, A.; Neumann, T. Testing the performance of a ground-based wind LiDAR system. One year intercomparison at the offshore platform FIN01. DEWI-Magazin, 15 February 2011. [Google Scholar]
- Yair, Y.; Ziv, B. An Introduction to Meteorology, Units 5–7 (Updated and Revised); The Open University of Israel: Ra’anana, Israel, 2014. [Google Scholar]
- Dayan, U.; Rodnizki, J. The temporal behavior of the atmospheric boundary layer in Israel. J. Appl. Meteorol. 1999, 38, 830–836. [Google Scholar] [CrossRef]
- Alpert, P.; Rabinovich-Hadar, M. Pre- and post- frontal lin–s—A meso gamma scale analysis over South Israel. J. Atmos. Sci. 2003, 60, 2994–3008. [Google Scholar] [CrossRef]
- Alpert, P.; Osetinsky, I.; Ziv, B.; Shafir, H. A new season’s definition based on classified daily synoptic systems: An example for the eastern Mediterranean. Int. J. Climatol. 2004, 24, 1013–1021. [Google Scholar] [CrossRef]
- Tyrlis, E.; Lelieveld, J.; Steil, B. The summer circulation over the eastern Mediterranean and the Middle East: Influence of the South Asian monsoon. Clim. Dyn. 2012, 40, 1103–1123. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Ganor, E.; Stupp, A.; Alpert, P. A method to determine the effect of mineral dust aerosols on air quality. Atmos. Environ. 2009, 43, 5463–5468. [Google Scholar] [CrossRef]
- Shellhorn, R.A.; Vaisala, B.O. Advances in Tethered Balloon Sounding Technology. In Proceedings of the 12th Symposium on Meteorological Observations and Instrumentation. 2003. Available online: https://ams.confex.com/ams/pdfpapers/58534.pdf/ (accessed on 4 July 2022).
- Vaisala Tethersonde TTS111. Available online: https://www.yumpu.com/en/document/read/11364490/vaisala-tethersonde-tts111-hobeco. (accessed on 4 July 2022).
- Thies Clima Products. Available online: https://www.thiesclima.com/en/Products/Wind-First-Class/ (accessed on 4 July 2022).
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.B.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.-Y.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Model Version 4.3; National Center for Atmospheric Research: Boulder, CO, USA, 2021; p. 145. [Google Scholar]
- Avisar, D.; Pelta, R.; Chudnovsky, A.; Rostkier-Edelstein, D. High Resolution WRF Simulations for the Tel-Aviv Metropolitan Area Reveal the Urban Fingerprint in the Sea-Breeze Hodograph. J. Geophys. Res. Atmos. 2021, 126, e2020JD033691. [Google Scholar] [CrossRef]
- Xie, B.; Fung, J.C.H.; Chan, A.; Lau, A. Evaluation of nonlocal and local planetary boundary layer schemes in the WRF model. J. Geophys. Res. 2012, 117, D12103. [Google Scholar] [CrossRef]
- Kunin, P.; Alpert, P.; Rostkier-Edelstein, D. Study of Sea-breeze/Foehn in the Dead Sea Valley employing High Resolution WRF and Observations. Atmos. Res. 2019, 229, 240–254. [Google Scholar] [CrossRef]
- Fovell, R.G.; Gallagher, A. Boundary layer and surface verification of the high-resolution rapid refresh, version 3. Weather Forecast. 2020, 35, 2255–2278. [Google Scholar] [CrossRef]
- Lenchow, D.H.; Wulfmeyer, V.; Sneff, C. Measuring second through fourth-order moments in noisy data. J. Atmos. Ocean. Technol. 2000, 17, 1330–1347. [Google Scholar] [CrossRef]
- Newsom, R.K.; Krishnamurthy, R. Doppler Lidar (DL) Instrument Handbook No. DOE/SC-ARM/TR-101; DOE Office of Science Atmospheric Radiation Measurement (ARM) User Facility, ARM Data Center: Oak Ridge, YN, USA, 2020.
- Smalikho, I.N.; Banakh, V.A. Measurements of wind turbulence parameters by a conically scanning coherent Doppler lidar in the atmospheric boundary layer. Atmos. Meas. Technol. 2017, 10, 4191–4208. [Google Scholar] [CrossRef]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1988; Volume 13. [Google Scholar]
- Zhao, H.; Che, H.; Xia, X.; Wang, Y.; Wang, H.; Wang, P.; Ma, Y.; Yang, H.; Liu, Y.; Wang, Y.; et al. Climatology of mixing layer height in China based on multi-year meteorological data from 2000 to 2013. Atmos. Environ. 2019, 213, 90–103. [Google Scholar] [CrossRef]
- Brooks, I.M. Finding boundary layer top: Application of a wavelet covariance transform to lidar backscatter profiles. J. Atmos. Ocean. Technol. 2003, 20, 1092–1105. [Google Scholar] [CrossRef]
- Haeffelin, M.; Angelini, F.; Morille, Y.; Martucci, G.; Frey, S.; Gobbi, G.P.; Lolli, S.; O’dowd, C.D.; Sauvage, L.; Xueref-Remy, I.; et al. Evaluation of mixing-height retrievals from automatic profiling lidars and ceilometers in view of future integrated networks in Europe. Bound. Layer Meteorol. 2012, 143, 49–75. [Google Scholar] [CrossRef]
- Davis, K.J.; Gamage, N.; Hagelberg, C.R.; Kiemle, C.; Lenschow, D.H.; Sullivan, P.P. An objective method for deriving atmospheric structure from airborne lidar observations. J. Atmos. Ocean. Technol. 2000, 17, 1455–1468. [Google Scholar] [CrossRef]
- Warner, T.T. Numerical Weather and Climate Prediction; Cambridge University Press: Cambridge, UK, 2011; p. 526. ISBN 978-0-521-51389-0. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Scanning Type [Mode and Azimuthal Angle °] | Control System | Correlation Values | Site Location and Features | Campaign Period |
|---|---|---|---|---|---|
| Päschke et al., 2015 [18] | VAD 75 | DWD 482 MGH Radar | RMSE = 0.62 Bias = 0.2 | Flat terrain, continental. Rural. Agricultural land use | one year of data with 0.5-h averaging |
| Rs92 Radiosondes [Vaisala, Vantaa, Finland] | RMSE = 0.86 Bias = 0.12 | ||||
| Lane et al., 2013 [19] | DBS 75 | R3-50 Sonic Anemometer [Gil instruments, Lymington, UK] | RMSE = 1.12 Bias = 0.81 | Flat terrain, continental. Densely built urban. | 3993 h of data with 1 h averaging |
| Mariani et al., 2020 [20] | DBS 70 | Rs92 Radiosondes [Vaisala] | R2 > 0.81 Bias = 0.46 | Multiple site:
| 19 months of data |
| VAD 70 | R2 > 0.89 Bias = 0.27 | ||||
| Newsom et al., 2016 [6] | VAD 60 | CSAT3 Sonic anemometer [Campbell Scientific, Logan, UT, USA] | R2 > 0.94 | High planes, continental. Rural. | 6 weeks |
| Pearson et al., 2009 [3] | VAD 60 DBS 60 | Sonic anemometer, radiosondes and radar wind profiler | Not reported | Flat terrain, continental. Rural | 51 days |
| Santos et al., 2015 [21] | VAD | Sonic and cup anemometers | R2 = 0.97 Bias = 0.21 | Sea shore, with prevailing strong sea winds | 1 year |
| Araki et al., 2018 [22] | Not reported | Cup anemometer. | R2 = 0.99 Bias = 0.13 | Sea shore. Rural. Flat terrain | 1 month |
| Klass et al., 2015 [23] | VAD 62 | Cup anemometer [Thies Clima, Gottingen, Germany]; Ultrasonic anemometer [Thies Clima] | R2 = 0.99 Bias 0.11 | Complex terrain, forested. | 160 days |
| Knoop et al., 2021 [24] | VAD 60 | Cup anemometer and wind vanes | R2 ≥ 0.99 Bias ≤ 0.08 | Flat terrain. Rural. Continental. | 2 years |
| Cañadillas et al., 2011 [25] | VAD | Cup and sonic anemometers | R2 > 0.99 | Off-shore platform | 1 year |
| Specification | Value |
|---|---|
| Pulse sampling frequency | 100 MHz |
| Laser Wavelength | 1550 nm |
| Laser Rap. Rate | 10 KHz |
| Laser pulse length (FWHM) | 310 ns |
| Output power (average) | 400 mW |
| Average beam opening | 60 rad |
| Scanner Elevation range | −3°–+90° |
| Scanner angle resolution | 0.2 mRad |
| Scanner angular speed | 1020 mRad/s |
| Wind velocity range | |
| Wind velocity precision | |
| Minimal range for measurements | 30–40 m |
| Maximal range for measurements | 6000–12,000 m |
| Range resolution System Dimensions in m (W × L × H) | 1.5 m 0.6 m × 0.5 m × 0.4 m |
| Height (m) | 50–200 | 200–350 | 250–500 | 500–650 | 650–800 | 800–950 |
|---|---|---|---|---|---|---|
| Percentage (%) | 12 | 27 | 31 | 14 | 14 | 2 |
| DBS 60 | DBS 80 | VAD 60 | VAD 80 | |
|---|---|---|---|---|
| LiDAR vs. tethered balloon system (74 measurement points) | Correlation of horizontal wind speed | |||
| Correlation of horizontal wind direction | ||||
| LiDAR vs. mast (192 measurement points) | Correlation of horizontal wind speed | |||
| Correlation of horizontal wind direction | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tzadok, T.; Ronen, A.; Rostkier-Edelstein, D.; Agassi, E.; Avisar, D.; Berkovic, S.; Manor, A. Profiling the Planetary Boundary Layer Wind with a StreamLine XR Doppler LiDAR: Comparison to In-Situ Observations and WRF Model Simulations. Remote Sens. 2022, 14, 4264. https://doi.org/10.3390/rs14174264
Tzadok T, Ronen A, Rostkier-Edelstein D, Agassi E, Avisar D, Berkovic S, Manor A. Profiling the Planetary Boundary Layer Wind with a StreamLine XR Doppler LiDAR: Comparison to In-Situ Observations and WRF Model Simulations. Remote Sensing. 2022; 14(17):4264. https://doi.org/10.3390/rs14174264
Chicago/Turabian StyleTzadok, Tamir, Ayala Ronen, Dorita Rostkier-Edelstein, Eyal Agassi, David Avisar, Sigalit Berkovic, and Alon Manor. 2022. "Profiling the Planetary Boundary Layer Wind with a StreamLine XR Doppler LiDAR: Comparison to In-Situ Observations and WRF Model Simulations" Remote Sensing 14, no. 17: 4264. https://doi.org/10.3390/rs14174264