
A Systematic Review of UAV Applications for Mapping Neglected and Underutilised Crop Species’ Spatial Distribution and Health
 , ,
, ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Literature Search
- (a)
- The study focuses on NUS crops, traditional, or orphaned crops, and no other vegetation types (e.g., forests or shrubs) were included, since they denoted different ecosystems;
- (b)
- The study focuses on NUS productivity (i.e., LAI, chlorophyll, or stomatal conductance) or spatial distribution;
- (c)
- The study was based on UAV or drone remotely sensed data, GIS, or remote-sensing techniques in NUS crop productivity and health mapping;
- (d)
- The article was published in an accredited journal;
- (e)
- The article was written in English;
- (f)
- The article was accessible.

2.2. Data Extraction
2.3. Data Analysis
- (1)
- Selecting a counting method (binary counting or full counting);
- (2)
- Selecting a minimum number of occurrences for a term (calculating similarity index);
- (3)
- Calculating the relevance score for the co-occurrence terms and displaying the most relevant items based on this score;
- (4)
- Displaying a map based on the selected terms.
3. Results
3.1. Progress in Mapping the Spatial Distribution and Health Status of Neglected and Underutilised Crop Species
3.2. Assessing Literature on Classification and Stomatal Conductance Estimation of Taro and Sweet Potato Crops
3.3. Types of Sensors and Their Spectral Resolutions
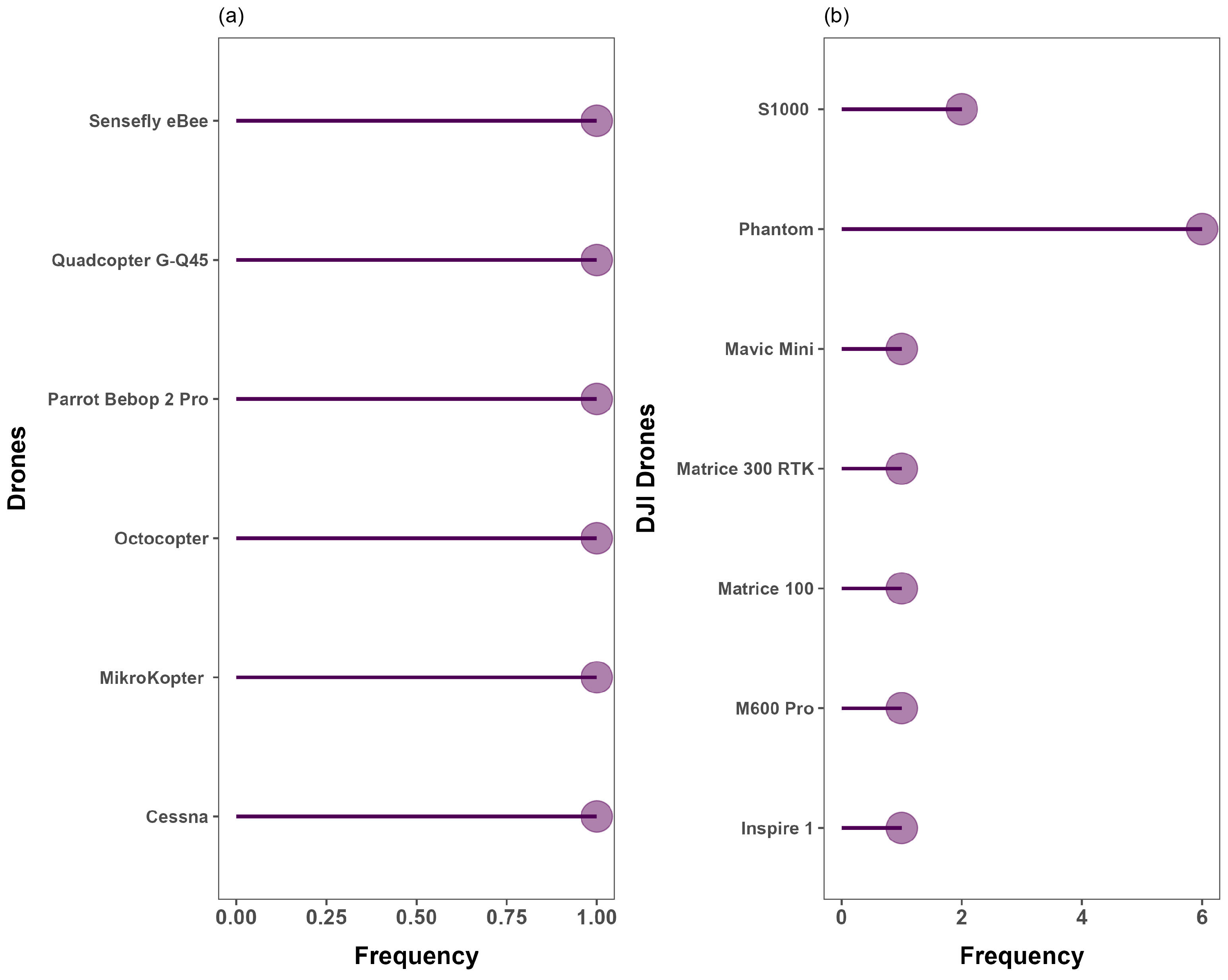
3.4. UAV Platforms Utilised in the Literature
3.5. Derived Vegetation Indices in Remote the Spatial Distribution and Health of NUS Crops
3.6. Statistical and Machine Algorithms Were Utilised in Mapping the Spatial Distribution and Health of NUS Crops
4. Discussion
4.1. Evolution of Drone Technology Applications in Remote Sensing
4.1.1. Frequency of Publication and Their Geographic Distribution
4.1.2. NUS Crop Attributes That Have Been Remotely Sensed Using Drone-Acquired Data
4.1.3. Sensors and Platforms That Were Used in Remote Sensing NUS
4.1.4. Performance of Vegetation Indices, Classification, and Estimation Algorithms
4.2. Challenges in Mapping the Spatial Distribution and Health of NUS Using UAVs
4.3. Research Gaps and Opportunities
- The observation of NUS crop health has garnered minimal research attention and interest from the scientific community. Further, few studies have sought to evaluate the utility of drone technology for characterizing crop dynamics, especially in the Global South. The limited research within this region means there are opportunities to innovate;
- Although NUS crops reportedly resist abiotic stresses, such as drought and heat stress, most of this information is anecdotal and inconsistent [1]. This incomplete body of knowledge around drought and heat stress makes applying and validating RS techniques challenging. Hence, there is a requirement to generate more empirical information on the ecophysiology and morphology of NUS;
- Only a few research studies have sought to evaluate the effectiveness of robust ML algorithms in conjunction with VIs in predicting the spatial distribution and health of NUS crops. Further to this, few studies have attempted to assess and leverage the potential synergies between drone and satellite-borne datasets, especially considering the release of the freely accessible Planet Scope Sentinel 2 MSI and Landsat series;
- The application of UAV-based technology for estimating NUS’ spatial extent and health has not attracted significant attention from the geospatial research community in practice. The spatial extent of NUS crops can be predicted at a granular scale using UAV-based modelling and classification. Such models will be useful for predicting crop yield, crop monitoring, predicting soil quality, and modelling evapotranspiration, precipitation, drought, and pest outbreaks;
- Modelling and predicting vegetation key variables, such as LAI, stomatal conductance, and AGB, are critical to understanding and quantifying NUS’ morphological and phenological processes in the face of climate change;
- Optimal VIs, such as NDVI NDRE, and VARI, can aid smallholder farmers in analysing trends in plant health. Moreover, NDRE is useful in determining vegetative vigour late in the growing season.
4.4. Way Forward: Closing the Gaps in the Utilisation of Drone Technology in Mapping Spatial Distribution and Health Status of NUS Crops
5. Limitations of This Study
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Food and Agriculture Organisation of the United Nations. Small Family Farmers Produce a Third of the World’s Food; Food and Agriculture Organisation of the United Nations: Rome, Italy, 2021. [Google Scholar]
- Fan, S.; Rue, C. The role of smallholder farms in a changing world. In The Role of Smallholder Farms in Food and Nutrition Security; Springer Nature: Cham, Switzerland, 2020; pp. 13–28. [Google Scholar]
- Mabhaudhi, T.; Chimonyo, V.G.; Modi, A.T. Status of underutilised crops in South Africa: Opportunities for developing research capacity. Sustainability 2017, 9, 1569. [Google Scholar] [CrossRef]
- Mugiyo, H.; Chimonyo, V.G.; Sibanda, M.; Kunz, R.; Nhamo, L.; Masemola, C.R.; Dalin, C.; Modi, A.T.; Mabhaudhi, T. Multi-criteria suitability analysis for neglected and underutilised crop species in South Africa. PLoS ONE 2021, 16, e0244734. [Google Scholar] [CrossRef] [PubMed]
- Joshi, B.K.; Shrestha, R.; Gauchan, D.; Shrestha, A. Neglected, underutilized, and future smart crop species in Nepal. J. Crop Improv. 2020, 34, 291–313. [Google Scholar] [CrossRef]
- Li, K.-Y.; Burnside, N.G.; Sampaio de Lima, R.; Villoslada Peciña, M.; Sepp, K.; Yang, M.-D.; Raet, J.; Vain, A.; Selge, A.; Sepp, K. The application of an unmanned aerial system and machine learning techniques for red clover-grass mixture yield estimation under variety performance trials. Remote Sens. 2021, 13, 1994. [Google Scholar] [CrossRef]
- Muruganantham, P.; Wibowo, S.; Grandhi, S.; Samrat, N.H.; Islam, N. A systematic literature review on crop yield prediction with deep learning and remote sensing. Remote Sens. 2022, 14, 1990. [Google Scholar] [CrossRef]
- Butilă, E.V.; Boboc, R.G. Urban traffic monitoring and analysis using unmanned aerial vehicles (UAVs): A systematic literature review. Remote Sens. 2022, 14, 620. [Google Scholar] [CrossRef]
- Duarte, A.; Borralho, N.; Cabral, P.; Caetano, M. Recent advances in forest insect pests and diseases monitoring using UAV-based data: A systematic review. Forests 2022, 13, 911. [Google Scholar] [CrossRef]
- Ankrah, J.; Monteiro, A.; Madureira, H. Shoreline Change and Coastal Erosion in West Africa: A Systematic Review of Research Progress and Policy Recommendation. Geosciences 2023, 13, 59. [Google Scholar] [CrossRef]
- Opole, R.A. Effect of Environmental Stress and Management on Grain and Biomass Yield of Finger Millet [Eleusine coracana (L.) Gaertn.]; Kansas State University: Manhattan, KS, USA, 2012. [Google Scholar]
- Everitt, J.; Yang, C.; Davis, M.; Everitt, J.; Davis, M. Mapping wild taro with color-infrared aerial photography and image processing. J. Aquat. Plant Manag. 2007, 45, 106–110. [Google Scholar]
- Mabhaudhi, T.; Modi, A.; Beletse, Y. Growth, phenological and yield responses of a bambara groundnut (Vigna subterranea L. Verdc) landrace to imposed water stress: II. Rain shelter conditions. Water SA 2013, 39, 191–198. [Google Scholar] [CrossRef]
- Mazarire, T.; Ratshiedana, P.; Nyamugama, A.; Adam, E.; Chirima, G. Exploring machine learning algorithms for mapping crop types in a heterogeneous agriculture landscape using Sentinel-2 data. A case study of Free State Province, South Africa. S. Afr. J. Geomat. 2020, 9, 333–347. [Google Scholar] [CrossRef]
- Malinao, R.M.L.; Hernandez, A.A. Classifying Breadfruit Tree using Artificial Neural Networks. In Proceedings of the 6th ACM/ACIS International Conference on Applied Computing and Information Technology, Kunming, China, 13–15 June 2018; pp. 27–31. [Google Scholar]
- Shao, Y.; Liu, Y.; Xuan, G.; Wang, Y.; Gao, Z.; Hu, Z.; Han, X.; Gao, C.; Wang, K. Application of hyperspectral imaging for spatial prediction of soluble solid content in sweet potato. RSC Adv. 2020, 10, 33148–33154. [Google Scholar] [CrossRef] [PubMed]
- Che’Ya, N.N.; Dunwoody, E.; Gupta, M. Assessment of Weed Classification Using Hyperspectral Reflectance and Optimal Multispectral UAV Imagery. Agronomy 2021, 11, 1435. [Google Scholar] [CrossRef]
- Grüner, E.; Astor, T.; Wachendorf, M. Prediction of biomass and N fixation of legume–grass mixtures using sensor fusion. Front. Plant Sci. 2021, 11, 603921. [Google Scholar] [CrossRef]
- Azizan, F.A.; Kiloes, A.M.; Astuti, I.S.; Abdul Aziz, A. Application of optical remote sensing in rubber plantations: A systematic review. Remote Sens. 2021, 13, 429. [Google Scholar] [CrossRef]
- Ramírez, D.A.; Grüneberg, W.; Andrade, I.M.; De Boeck, B.; Loayza, H.; Makunde, S.G.; Ninanya, J.; Rinza, J.; Heck, S.; Campos, H. Phenotyping of productivity and resilience in sweetpotato under water stress through UAV-based multispectral and thermal imagery in Mozambique. J. Agron. Crop Sci. 2021, 209, 41–55. [Google Scholar] [CrossRef]
- Shi, Y.; Murray, S.C.; Rooney, W.L.; Valasek, J.; Olsenholler, J.; Pugh, N.A.; Henrickson, J.; Bowden, E.; Zhang, D.; Thomasson, J.A. Corn and sorghum phenotyping using a fixed-wing UAV-based remote sensing system. In Proceedings of the Autonomous air and ground sensing systems for agricultural optimization and phenotyping, Baltimore, MD, USA, 17 May 2016; pp. 46–53. [Google Scholar]
- Suhairi, T.A.S.T.M.; Sinin, S.S.M.; Wimalasiri, E.M.; Nizar, N.M.M.; Tharmandran, A.S.; Jahanshiri, E.; Gregory, P.J.; Azam-Ali, S.N. Use of Unmanned Aerial Vehicles (UAVs) Imagery in Phenotyping of Bambara Groundnut. J. Agric. Sci. 2020, 12, 12–22. [Google Scholar] [CrossRef]
- Jewan, S.Y.Y.; Pagay, V.; Billa, L.; Tyerman, S.D.; Gautam, D.; Sparkes, D.; Chai, H.H.; Singh, A. The feasibility of using a low-cost near-infrared, sensitive, consumer-grade digital camera mounted on a commercial UAV to assess Bambara groundnut yield. Int. J. Remote Sens. 2022, 43, 393–423. [Google Scholar] [CrossRef]
- Lati, R.; Avneri, A.; Aharon, S.; Atsmon, G.; Smirnov, E.; Sadeh, R.; Abbo, S.; Peleg, Z.; Herrmann, I.; Bonfil, D.J. Uav-Based Imaging for Prediction of Chickpea Crop Biophysical Parameters and Yield. Comput. Electron. Agric. 2023, 205, 107581. [Google Scholar] [CrossRef]
- Xia, W.; Luo, T.; Zhang, W.; Mason, A.S.; Huang, D.; Huang, X.; Tang, W.; Dou, Y.; Zhang, C.; Xiao, Y. Development of high-density SNP markers and their application in evaluating genetic diversity and population structure in Elaeis guineensis. Front. Plant Sci. 2019, 10, 130. [Google Scholar] [CrossRef] [PubMed]
- Parra, L.; Mostaza-Colado, D.; Yousfi, S.; Marin, J.F.; Mauri, P.V.; Lloret, J. Drone RGB images as a reliable information source to determine legumes establishment success. Drones 2021, 5, 79. [Google Scholar] [CrossRef]
- Pereira, F.d.S.; de Lima, J.; Freitas, R.; Dos Reis, A.A.; do Amaral, L.R.; Figueiredo, G.K.D.A.; Lamparelli, R.A.; Magalhães, P.S.G. Nitrogen variability assessment of pasture fields under an integrated crop-livestock system using UAV, PlanetScope, and Sentinel-2 data. Comput. Electron. Agric. 2022, 193, 106645. [Google Scholar] [CrossRef]
- Sobejano-Paz, V.; Mikkelsen, T.N.; Baum, A.; Mo, X.; Liu, S.; Köppl, C.J.; Johnson, M.S.; Gulyas, L.; García, M. Hyperspectral and thermal sensing of stomatal conductance, transpiration, and photosynthesis for soybean and maize under drought. Remote Sens. 2020, 12, 3182. [Google Scholar] [CrossRef]
- Liu, Y.; Hatou, K.; Aihara, T.; Kurose, S.; Akiyama, T.; Kohno, Y.; Lu, S.; Omasa, K. A robust vegetation index based on different UAV RGB images to estimate SPAD values of naked barley leaves. Remote Sens. 2021, 13, 686. [Google Scholar] [CrossRef]
- Huang, Y.; Reddy, K.N.; Fletcher, R.S.; Pennington, D. UAV low-altitude remote sensing for precision weed management. Weed Technol. 2018, 32, 2–6. [Google Scholar] [CrossRef]
- Sankaran, S.; Zhou, J.; Khot, L.R.; Trapp, J.J.; Mndolwa, E.; Miklas, P.N. High-throughput field phenotyping in dry bean using small unmanned aerial vehicle based multispectral imagery. Comput. Electron. Agric. 2018, 151, 84–92. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Mutanga, O.; Dube, T.; Galal, O. Remote sensing of crop health for food security in Africa: Potentials and constraints. Remote Sens. Appl. Soc. Environ. 2017, 8, 231–239. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Chimonyo, V.G.P.; Clulow, A.D.; Shoko, C.; Mazvimavi, D.; Dube, T.; Mabhaudhi, T. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones 2021, 5, 84. [Google Scholar] [CrossRef]
- Funk, C.; Budde, M.E. Phenologically-tuned MODIS NDVI-based production anomaly estimates for Zimbabwe. Remote Sens. Environ. 2009, 113, 115–125. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef]
- Goel, R.K.; Yadav, C.S.; Vishnoi, S.; Rastogi, R. Smart agriculture–Urgent need of the day in developing countries. Sustain. Comput. Inform. Syst. 2021, 30, 100512. [Google Scholar] [CrossRef]
- Velusamy, P.; Rajendran, S.; Mahendran, R.K.; Naseer, S.; Shafiq, M.; Choi, J.-G. Unmanned Aerial Vehicles (UAV) in Precision Agriculture: Applications and Challenges. Energies 2021, 15, 217. [Google Scholar] [CrossRef]
- Fageria, N.K.; Baligar, V.C.; Clark, R. Physiology of Crop Production; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Aboutalebi, M.; Torres-Rua, A.F.; Allen, N. Multispectral Remote Sensing for Yield Estimation Using High-Resolution Imagery from an Unmanned Aerial Vehicle. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping III, Orlando, FL, USA, 15–19 April 2018; SPIE: Bellingham, WA, USA, 2018; Volume 10664, pp. 140–149. [Google Scholar]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of remote sensing in precision agriculture: A review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Van Wart, J.; Kersebaum, K.C.; Peng, S.; Milner, M.; Cassman, K.G. Estimating crop yield potential at regional to national scales. Field Crops Res. 2013, 143, 34–43. [Google Scholar] [CrossRef]
- Duku, C.; Zwart, S.J.; van Bussel, L.G.; Hein, L. Quantifying trade-offs between future yield levels, food availability and forest and woodland conservation in Benin. Sci. Total Environ. 2018, 610, 1581–1589. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Feng, H.; Yue, J.; Fan, Y.; Jin, X.; Song, X.; Yang, H.; Yang, G. Estimation of Potato Above-Ground Biomass Based on Vegetation Indices and Green-Edge Parameters Obtained from UAVs. Remote Sens. 2022, 14, 5323. [Google Scholar] [CrossRef]
- Ali, A.; Imran, M. Evaluating the potential of red edge position (REP) of hyperspectral remote sensing data for real time estimation of LAI & chlorophyll content of kinnow mandarin (Citrus reticulata) fruit orchards. Sci. Hortic. 2020, 267, 109326. [Google Scholar]
- Buthelezi, S.; Mutanga, O.; Sibanda, M.; Odindi, J.; Clulow, A.D.; Chimonyo, V.G.P.; Mabhaudhi, T. Assessing the Prospects of Remote Sensing Maize Leaf Area Index Using UAV-Derived Multi-Spectral Data in Smallholder Farms across the Growing Season. Remote Sens. 2023, 15, 1597. [Google Scholar] [CrossRef]
- Wu, S.; Deng, L.; Guo, L.; Wu, Y. Wheat leaf area index prediction using data fusion based on high-resolution unmanned aerial vehicle imagery. Plant Methods 2022, 18, 1–16. [Google Scholar] [CrossRef]
- Blessing, C.; Nhamo, M.; Rangarirai, M. The impact of plant density and spatial arrangement on light interception on cotton crop and seed cotton yield: An overview. J. Cotton Res. 2020, 3, 18. [Google Scholar]
- Xue, J.; Su, B. Significant remote sensing vegetation indices: A review of developments and applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Williams, T.B.; Dodd, I.C.; Sobeih, W.Y.; Paul, N.D. Ultraviolet radiation causes leaf warming due to partial stomatal closure. Hortic. Res. 2022, 9, uhab066. [Google Scholar] [CrossRef] [PubMed]
- Raji, S.N.; Aparna, G.N.; Mohanan, C.N.; Subhash, N. Proximal remote sensing of herbicide and drought stress in field grown colocasia and sweet potato plants by sunlight-induced chlorophyll fluorescence Imaging. J. Indian Soc. Remote Sens. 2017, 45, 463–475. [Google Scholar] [CrossRef]
- Singhal, G.; Bansod, B.; Mathew, L.; Goswami, J.; Choudhury, B.; Raju, P. Estimation of leaf chlorophyll concentration in turmeric (Curcuma longa) using high-resolution unmanned aerial vehicle imagery based on kernel ridge regression. J. Indian Soc. Remote Sens. 2019, 47, 1111–1122. [Google Scholar] [CrossRef]
- Brewer, K.; Clulow, A.; Sibanda, M.; Gokool, S.; Naiken, V.; Mabhaudhi, T. Predicting the Chlorophyll Content of Maize over Phenotyping as a Proxy for Crop Health in Smallholder Farming Systems. Remote Sens. 2022, 14, 518. [Google Scholar] [CrossRef]
- Tahir, M.N.; Naqvi, S.Z.A.; Lan, Y.; Zhang, Y.; Wang, Y.; Afzal, M.; Cheema, M.J.M.; Amir, S. Real time estimation of chlorophyll content based on vegetation indices derived from multispectral UAV in the kinnow orchard. Int. J. Precis. Agric. Aviat. 2018, 1, 24–31. [Google Scholar]
- Monteoliva, M.I.; Guzzo, M.C.; Posada, G.A. Breeding for Drought Tolerance by Monitoring Chlorophyll Content. Gene Technol. 2021, 10, 165. [Google Scholar]
- Bojović, B.; Marković, A. Correlation between nitrogen and chlorophyll content in wheat (Triticum aestivum L.). Kragujev. J. Sci. 2009, 31, 69–74. [Google Scholar]
- Musa, M.; Massawe, F.; Mayes, S.; Alshareef, I.; Singh, A. Nitrogen fixation and N-balance studies on Bambara groundnut (Vigna subterranea L. Verdc) landraces grown on tropical acidic soils of Malaysia. Commun. Soil Sci. Plant Anal. 2016, 47, 533–542. [Google Scholar]
- Blumenthal, J.; Megherbi, D.B.; Lussier, R. Unsupervised machine learning via Hidden Markov Models for accurate clustering of plant stress levels based on imaged chlorophyll fluorescence profiles & their rate of change in time. Comput. Electron. Agric. 2020, 174, 105064. [Google Scholar]
- Liu, C.; Liu, Y.; Lu, Y.; Liao, Y.; Nie, J.; Yuan, X.; Chen, F. Use of a leaf chlorophyll content index to improve the prediction of above-ground biomass and productivity. PeerJ 2019, 6, e6240. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Ren, B.; Ding, L.; Shen, Q.; Peng, S.; Guo, S. Does chloroplast size influence photosynthetic nitrogen use efficiency? PLoS ONE 2013, 8, e62036. [Google Scholar] [CrossRef] [PubMed]
- Muhammad, A.; Alam, M.; Ahmad, I.; Jalal, A. Role of beneficial microbes with nitrogen and phosphorous levels on canola productivity. Braz. J. Biol. 2021, 82, e227703. [Google Scholar]
- Iseki, K.; Olaleye, O. A new indicator of leaf stomatal conductance based on thermal imaging for field grown cowpea. Plant Prod. Sci. 2020, 23, 136–147. [Google Scholar] [CrossRef]
- Wijewardana, C.; Alsajri, F.A.; Irby, J.T.; Krutz, L.J.; Golden, B.; Henry, W.B.; Gao, W.; Reddy, K.R. Physiological assessment of water deficit in soybean using midday leaf water potential and spectral features. J. Plant Interact. 2019, 14, 533–543. [Google Scholar] [CrossRef]
- Ouyang, W.; Struik, P.C.; Yin, X.; Yang, J. Stomatal conductance, mesophyll conductance, and transpiration efficiency in relation to leaf anatomy in rice and wheat genotypes under drought. J. Exp. Bot. 2017, 68, 5191–5205. [Google Scholar] [CrossRef]
- Chai, H.H.; Massawe, F.; Mayes, S. Effects of mild drought stress on the morpho-physiological characteristics of a bambara groundnut segregating population. Euphytica 2016, 208, 225–236. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.; Zaman, Q.; Shaheen, A.; Aslam, B.; Zhu, W.; Ajmal, M.; Faheem, M.; Hussain, S. UAV-based remote sensing in plant stress imagine using high-resolution thermal sensor for digital agriculture practices: A meta-review. Int. J. Environ. Sci. Technol. 2022, 20, 1135–1152. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.J.; Hussain, S.; Shaheen, A.; Aslam, B.; Liu, C.; Ali, A. Assessment of optimal flying height and timing using high-resolution unmanned aerial vehicle images in precision agriculture. Int. J. Environ. Sci. Technol. 2022, 19, 2703–2720. [Google Scholar] [CrossRef]
- Majid, K.; Roza, G. The effect of drought stress on leaf chlorophyll content and stress resistance in maize cultivars (Zea mays). Afr. J. Microbiol. Res. 2012, 6, 2844–2848. [Google Scholar]
- Maes, W.H.; Steppe, K. Estimating evapotranspiration and drought stress with ground-based thermal remote sensing in agriculture: A review. J. Exp. Bot. 2012, 63, 4671–4712. [Google Scholar] [CrossRef]
- Pineda, M.; Baron, M.; Perez-Bueno, M.L. Thermal Imaging for Plant Stress Detection and Phenotyping. Remote Sens. 2021, 13, 68. [Google Scholar] [CrossRef]
- Chibarabada, T.P. Water Use and Nutritional Water Productivity of Selected Major and Underutilised Grain Legumes. Ph.D. Dissertation, University of KwaZulu-Natal, Pietermartzburg, South Africa, 2018. [Google Scholar]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping crop water stress index in a ‘Pinot-noir’vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precis. Agric. 2014, 15, 361–376. [Google Scholar] [CrossRef]
- Gray, P.C.; Ridge, J.T.; Poulin, S.K.; Seymour, A.C.; Schwantes, A.M.; Swenson, J.J.; Johnston, D.W. Integrating drone imagery into high resolution satellite remote sensing assessments of estuarine environments. Remote Sens. 2018, 10, 1257. [Google Scholar] [CrossRef]
- Clevers, J.G.; Gitelson, A.A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and-3. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 344–351. [Google Scholar] [CrossRef]
- Ndlovu, H.S.; Odindi, J.; Sibanda, M.; Mutanga, O.; Clulow, A.; Chimonyo, V.G.P.; Mabhaudhi, T. A Comparative Estimation of Maize Leaf Water Content Using Machine Learning Techniques and Unmanned Aerial Vehicle (UAV)-Based Proximal and Remotely Sensed Data. Remote Sens. 2021, 13, 4091. [Google Scholar] [CrossRef]
- Zheng, Q.; Huang, W.; Ye, H.; Dong, Y.; Shi, Y.; Chen, S. Using continous wavelet analysis for monitoring wheat yellow rust in different infestation stages based on unmanned aerial vehicle hyperspectral images. Appl. Opt. 2020, 59, 8003–8013. [Google Scholar] [CrossRef]
- Nyman, J. Pixel classification of hyperspectral images. In Proceedings of the 2022 5th International Conference on Machine Learning and Natural Language, Sanya, China, 23–25 December 2018. [Google Scholar]
- Marshall, M.; Thenkabail, P. Advantage of hyperspectral EO-1 Hyperion over multispectral IKONOS, GeoEye-1, WorldView-2, Landsat ETM+, and MODIS vegetation indices in crop biomass estimation. ISPRS J. Photogramm. Remote Sens. 2015, 108, 205–218. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Mariotto, I.; Gumma, M.K.; Middleton, E.M.; Landis, D.R.; Huemmrich, K.F. Selection of hyperspectral narrowbands (HNBs) and composition of hyperspectral twoband vegetation indices (HVIs) for biophysical characterization and discrimination of crop types using field reflectance and Hyperion/EO-1 data. Sel. Top. Appl. Earth Obs. Remote Sens. IEEE J. 2013, 6, 427–439. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Smith, R.B.; De Pauw, E. Evaluation of narrowband and broadband vegetation indices for determining optimal hyperspectral wavebands for agricultural crop characterization. Photogramm. Eng. Remote Sens. 2002, 68, 607–622. [Google Scholar]
- Mafuratidze, P. Discriminating Wetland Vegetation Species in an African Savanna Using Hyperspectral Data. Master’s Dissertation, University of KwaZulu-Natal, Pietermartzburg, South Africa, 2010. [Google Scholar]
- Zhang, L.; Zhang, H.; Niu, Y.; Han, W. Mapping Maize Water Stress Based on UAV Multispectral Remote Sensing. Remote Sens. 2019, 11, 605. [Google Scholar] [CrossRef]
- Zaludin, Z.; Harituddin, A.S.M. Challenges and Trends of Changing from Hover to Forward Flight for a Converted Hybrid Fixed Wing VTOL UAS from Automatic Flight Control System Perspective. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 247–252. [Google Scholar]
- Li, L.; Zheng, X.M.; Zhao, K.; Li, X.F.; Meng, Z.G.; Su, C.H. Potential Evaluation of High Spatial Resolution Multi-Spectral Images Based on Unmanned Aerial Vehicle in Accurate Recognition of Crop Types. J. Indian Soc. Remote Sens. 2020, 48, 1471–1478. [Google Scholar] [CrossRef]
- Mutanga, O.; Masenyama, A.; Sibanda, M. Spectral saturation in the remote sensing of high-density vegetation traits: A systematic review of progress, challenges, and prospects. ISPRS J. Photogramm. Remote Sens. 2023, 198, 297–309. [Google Scholar] [CrossRef]
- Sharifi, A. Remotely sensed vegetation indices for crop nutrition mapping. J. Sci. Food Agric. 2020, 100, 5191–5196. [Google Scholar] [CrossRef]
- Cabrera-Bosquet, L.; Molero, G.; Stellacci, A.; Bort, J.; Nogués, S.; Araus, J. NDVI as a potential tool for predicting biomass, plant nitrogen content and growth in wheat genotypes subjected to different water and nitrogen conditions. Cereal Res. Commun. 2011, 39, 147–159. [Google Scholar] [CrossRef]
- Filella, I.; Penuelas, J. The red edge position and shape as indicators of plant chlorophyll content, biomass and hydric status. Int. J. Remote Sens. 1994, 15, 1459–1470. [Google Scholar] [CrossRef]
- Guyot, G.; Baret, F.; Jacquemoud, S. Imaging Spectroscopy for Vegetation Studies; Kluwer Academic Publishers: Norwell, MA, USA, 1992; Volume 2. [Google Scholar]
- Mutanga, O.; Skidmore, A.K. Narrow band vegetation indices overcome the saturation problem in biomass estimation. Int. J. Remote Sens. 2004, 25, 3999–4014. [Google Scholar] [CrossRef]
- Mutanga, O.; Adam, E.; Cho, M.A. High density biomass estimation for wetland vegetation using WorldView-2 imagery and random forest regression algorithm. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 399–406. [Google Scholar] [CrossRef]
- Brewer, K.; Clulow, A.; Sibanda, M.; Gokool, S.; Odindi, J.; Mutanga, O.; Naiken, V.; Chimonyo, V.G.P.; Mabhaudhi, T. Estimation of Maize Foliar Temperature and Stomatal Conductance as Indicators of Water Stress Based on Optical and Thermal Imagery Acquired Using an Unmanned Aerial Vehicle (UAV) Platform. Drones 2022, 6, 169. [Google Scholar] [CrossRef]
- Brewer, K.R. Assessment of Maize Crop Health and Water Stress Based on Multispectral and Thermal Infrared Unmanned Aerial Vehicle Phenotyping in Smallholder Farms. Master’s Dissertation, University of KwaZulu-Natal, Pietermartzburg, South Africa, 2021. [Google Scholar]
- Sapkota, B.; Singh, V.; Cope, D.; Valasek, J.; Bagavathiannan, M. Mapping and Estimating Weeds in Cotton Using Unmanned Aerial Systems-Borne Imagery. Agriengineering 2020, 2, 350–366. [Google Scholar] [CrossRef]
- Gu, Y.; Wylie, B.K.; Boyte, S.P.; Picotte, J.; Howard, D.M.; Smith, K.; Nelson, K.J. An optimal sample data usage strategy to minimize overfitting and underfitting effects in regression tree models based on remotely-sensed data. Remote Sens. 2016, 8, 943. [Google Scholar] [CrossRef]
- Singh, C.; Karan, S.K.; Sardar, P.; Samadder, S.R. Remote sensing-based biomass estimation of dry deciduous tropical forest using machine learning and ensemble analysis. J. Environ. Manag. 2022, 308, 114639. [Google Scholar] [CrossRef]
- Ehlers, D.; Wang, C.; Coulston, J.; Zhang, Y.; Pavelsky, T.; Frankenberg, E.; Woodcock, C.; Song, C. Mapping Forest Aboveground Biomass Using Multisource Remotely Sensed Data. Remote Sens. 2022, 14, 1115. [Google Scholar] [CrossRef]
- Zhang, Y.; Teng, P.; Aono, M.; Shimizu, Y.; Hosoi, F.; Omasa, K. 3D monitoring for plant growth parameters in field with a single camera by multi-view approach. J. Agric. Meteorol. 2018, 74, 129–139. [Google Scholar] [CrossRef]
- Shirzadifar, A.; Bajwa, S.; Nowatzki, J.; Bazrafkan, A. Field identification of weed species and glyphosate-resistant weeds using high resolution imagery in early growing season. Biosyst. Eng. 2020, 200, 200–214. [Google Scholar] [CrossRef]
- Sengupta, S.; Mohinuddin, S.; Arif, M.; Sengupta, B.; Zhang, W. Assessment of agricultural land suitability using GIS and Fuzzy Analytical Hierarchy Process approach in Ranchi District, India. Geocarto Int. 2022, 37, 13337–13368. [Google Scholar] [CrossRef]
- Nguyen, H.P.D.; Nguyen, D.D. Drone application in smart cities: The general overview of security vulnerabilities and countermeasures for data communication. In Development and Future of Internet of Drones (IoD): Insights, Trends and Road Ahead; Springer: Cham, Switzerland, 2021; Volume 332, pp. 185–210. [Google Scholar]
- Kemp, L.; Roux, M.; Kemp, M.; Kock, R. Application of drones and image processing for bridge inspections in South Africa. Civ. Eng. Siviele Ingenieurswese 2021, 29, 25–30. [Google Scholar]
- Grote, M.; Pilko, A.; Scanlan, J.; Cherrett, T.; Dickinson, J.; Smith, A.; Oakey, A.; Marsden, G. Sharing airspace with Uncrewed Aerial Vehicles (UAVs): Views of the General Aviation (GA) community. J. Air Transp. Manag. 2022, 102, 102218. [Google Scholar] [CrossRef]
- Stopforth, R. Drone licenses-neccesities and requirements. II Ponte 2017, 73, 149–156. [Google Scholar]
- Kutugata, M.; Hu, C.; Sapkota, B.; Bagavathiannan, M. Seed rain potential in late-season weed escapes can be estimated using remote sensing. Weed Sci. 2021, 69, 653–659. [Google Scholar] [CrossRef]
- Biswas, A.; Andrade, M.H.M.L.; Acharya, J.P.; de Souza, C.L.; Lopez, Y.; De Assis, G.; Shirbhate, S.; Singh, A.; Munoz, P.; Rios, E.F. Phenomics-Assisted Selection for Herbage Accumulation in Alfalfa (Medicago sativa L.). Front. Plant Sci. 2021, 12, 756768. [Google Scholar] [CrossRef] [PubMed]
- Kourouma, J.M.; Eze, E.; Negash, E.; Phiri, D.; Vinya, R.; Girma, A.; Zenebe, A. Assessing the spatio-temporal variability of NDVI and VCI as indices of crops productivity in Ethiopia: A remote sensing approach. Geomat. Nat. Hazards Risk 2021, 12, 2880–2903. [Google Scholar] [CrossRef]
- Lima, J.G.; Espínola, J.; Medeiros, J.F.d.; Viana, P.C.; Maniçoba, R.M. Water requirement and crop coefficients of sorghum in Apodi Plateau. Rev. Bras. Eng. Agrícola Ambient. 2021, 25, 684–688. [Google Scholar] [CrossRef]
- Zakarya, Y.M.; Metwaly, M.M.; AbdelRahman, M.A.; Metwalli, M.R.; Koubouris, G. Optimized land use through integrated land suitability and GIS approach in West El-Minia Governorate, Upper Egypt. Sustainability 2021, 13, 12236. [Google Scholar] [CrossRef]
- Guo, Q.; Wu, F.; Pang, S.; Zhao, X.; Chen, L.; Liu, J.; Xue, B.; Xu, G.; Li, L.; Jing, H. Crop 3D—A LiDAR based platform for 3D high-throughput crop phenotyping. Sci. China Life Sci. 2018, 61, 328–339. [Google Scholar] [CrossRef]
- Tedesco, D.; de Oliveira, M.F.; dos Santos, A.F.; Silva, E.H.C.; de Souza Rolim, G.; da Silva, R.P. Use of remote sensing to characterize the phenological development and to predict sweet potato yield in two growing seasons. Eur. J. Agron. 2021, 129, 126337. [Google Scholar] [CrossRef]
- Tedesco, D.; de Almeida Moreira, B.R.; Júnior, M.R.B.; Papa, J.P.; da Silva, R.P. Predicting on multi-target regression for the yield of sweet potato by the market class of its roots upon vegetation indices. Comput. Electron. Agric. 2021, 191, 106544. [Google Scholar] [CrossRef]
- Punalekar, S.M.; Verhoef, A.; Quaife, T.; Humphries, D.; Bermingham, L.; Reynolds, C. Application of Sentinel-2A data for pasture biomass monitoring using a physically based radiative transfer model. Remote Sens. Environ. 2018, 218, 207–220. [Google Scholar] [CrossRef]
- Thenkabail, P. Biophysical and yield information for precision farming from near-real-time and historical Landsat TM images. Int. J. Remote Sens. 2003, 24, 2879–2904. [Google Scholar] [CrossRef]
- Zhang, P.; Hu, S.; Li, W.; Zhang, C. Parcel-level mapping of crops in a smallholder agricultural area: A case of central China using single-temporal VHSR imagery. Comput. Electron. Agric. 2020, 175, 105581. [Google Scholar] [CrossRef]
- Karimi, N.; Sheshangosht, S.; Eftekhari, M. Crop type detection using an object-based classification method and multi-temporal Landsat satellite images. Paddy Water Environ. 2022, 20, 395–412. [Google Scholar] [CrossRef]
- Karlson, M.; Ostwald, M.; Bayala, J.; Bazié, H.R.; Ouedraogo, A.S.; Soro, B.; Sanou, J.; Reese, H. The potential of Sentinel-2 for crop production estimation in a smallholder agroforestry landscape, Burkina Faso. Front. Environ. Sci. 2020, 8, 85. [Google Scholar] [CrossRef]
- Guan, K.; Berry, J.A.; Zhang, Y.; Joiner, J.; Guanter, L.; Badgley, G.; Lobell, D.B. Improving the monitoring of crop productivity using spaceborne solar-induced fluorescence. Glob. Chang. Biol. 2016, 22, 716–726. [Google Scholar] [CrossRef]
- Wimalasiri, E.M.; Jahanshiri, E.; Suhairi, T.; Udayangani, H.; Mapa, R.B.; Karunaratne, A.S.; Vidhanarachchi, L.P.; Azam-Ali, S.N. Basic Soil Data Requirements for Process-Based Crop Models as a Basis for Crop Diversification. Sustainability 2020, 12, 7781. [Google Scholar] [CrossRef]
- Teng, P.; Ono, E.; Zhang, Y.; Aono, M.; Shimizu, Y.; Hosoi, F.; Omasa, K. Estimation of ground surface and accuracy assessments of growth parameters for a sweet potato community in ridge cultivation. Remote Sens. 2019, 11, 1487. [Google Scholar] [CrossRef]
- Waldner, F.; Chen, Y.; Lawes, R.; Hochman, Z. Needle in a haystack: Mapping rare and infrequent crops using satellite imagery and data balancing methods. Remote Sens. Environ. 2019, 233, 111375. [Google Scholar] [CrossRef]
- Adams, T.; Bruton, R.; Ruiz, H.; Barrios-Perez, I.; Selvaraj, M.G.; Hays, D.B. Prediction of Aboveground Biomass of Three Cassava (Manihot esculenta) Genotypes Using a Terrestrial Laser Scanner. Remote Sens. 2021, 13, 1272. [Google Scholar] [CrossRef]
- Hama, A.; Matsumoto, Y.; Matsuoka, N. Estimating Leaf Water Content through Low-Cost LiDAR. Agronomy 2022, 12, 1183. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abrahams, M.; Sibanda, M.; Dube, T.; Chimonyo, V.G.P.; Mabhaudhi, T. A Systematic Review of UAV Applications for Mapping Neglected and Underutilised Crop Species’ Spatial Distribution and Health. Remote Sens. 2023, 15, 4672. https://doi.org/10.3390/rs15194672
Abrahams M, Sibanda M, Dube T, Chimonyo VGP, Mabhaudhi T. A Systematic Review of UAV Applications for Mapping Neglected and Underutilised Crop Species’ Spatial Distribution and Health. Remote Sensing. 2023; 15(19):4672. https://doi.org/10.3390/rs15194672
Chicago/Turabian StyleAbrahams, Mishkah, Mbulisi Sibanda, Timothy Dube, Vimbayi G. P. Chimonyo, and Tafadzwanashe Mabhaudhi. 2023. "A Systematic Review of UAV Applications for Mapping Neglected and Underutilised Crop Species’ Spatial Distribution and Health" Remote Sensing 15, no. 19: 4672. https://doi.org/10.3390/rs15194672