Author Contributions
Conceptualisation, J.S., B.B. and F.G.; methodology, J.S., B.B., A.D. and F.G.; software, J.S.; validation, J.S.; formal analysis, J.S.; investigation, J.S., B.B. and A.D.; resources, B.B., A.D., J.B. and F.G.; data curation, J.S., B.B., K.R. and J.B.; writing—original draft preparation, J.S.; writing—review and editing, B.B., A.D., K.R., J.B., S.A.R. and F.G.; visualisation, J.S. and B.B.; supervision, B.B. and F.G.; project administration, B.B., A.D., K.R., S.A.R. and F.G.; funding acquisition, B.B., J.B., S.A.R. and F.G. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Schematic representation of the proposed workflow, detailing five key phases: (1) data collection, involving aerial and on-ground hyperspectral data collection; (2) data preparation, including georeferencing and alignment of hyperspectral scans; (3) feature extraction, using various spectral and statistical variables from labelled images; (4) model training, which includes feature ranking; and (5) prediction, where the predicted vegetation maps are compared within developed ML models.
Figure 1.
Schematic representation of the proposed workflow, detailing five key phases: (1) data collection, involving aerial and on-ground hyperspectral data collection; (2) data preparation, including georeferencing and alignment of hyperspectral scans; (3) feature extraction, using various spectral and statistical variables from labelled images; (4) model training, which includes feature ranking; and (5) prediction, where the predicted vegetation maps are compared within developed ML models.
Figure 2.
The location of ASPA 135 (66°1660S, 110°3260E), showcasing (a) a zoom-in view from a global perspective to the ASPA (in purple) near Casey Station, Windmill Islands, East Antarctica, and the area of interest to collect HSI scans (in bright green); (b) ground photographs providing a sneak peek into the site’s natural features, including the moss and lichen under investigation.
Figure 2.
The location of ASPA 135 (66°1660S, 110°3260E), showcasing (a) a zoom-in view from a global perspective to the ASPA (in purple) near Casey Station, Windmill Islands, East Antarctica, and the area of interest to collect HSI scans (in bright green); (b) ground photographs providing a sneak peek into the site’s natural features, including the moss and lichen under investigation.
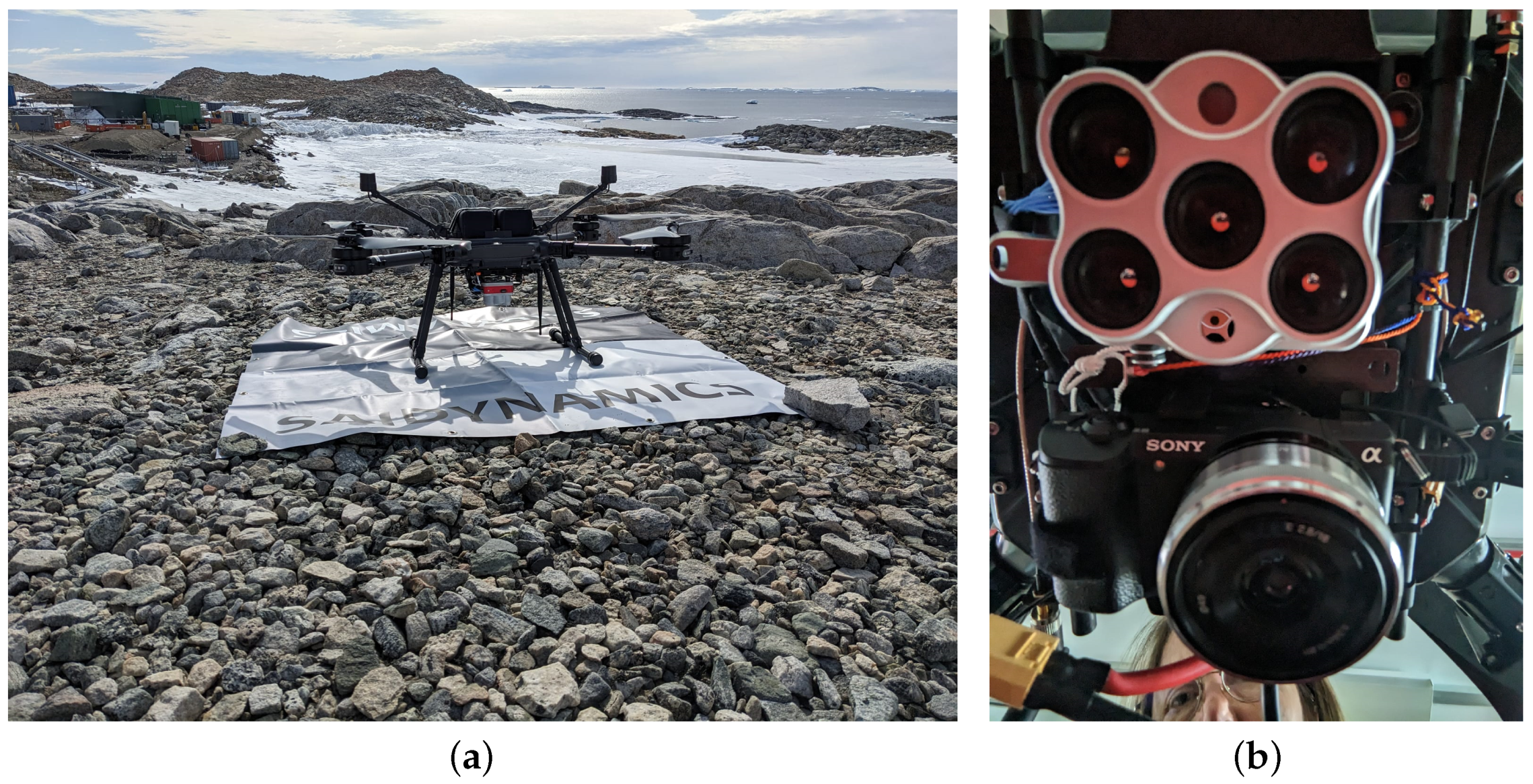
Figure 3.
UAV and sensors for aerial data collection in ASPA 135. (a) BMR3.9RTK UAV developed by SaiDynamics Australia. (b) MicaSense Altum multispectral (top), and Sony Alpha 5100 high-resolution RGB cameras mounted on the BMR3.9RTK.
Figure 3.
UAV and sensors for aerial data collection in ASPA 135. (a) BMR3.9RTK UAV developed by SaiDynamics Australia. (b) MicaSense Altum multispectral (top), and Sony Alpha 5100 high-resolution RGB cameras mounted on the BMR3.9RTK.
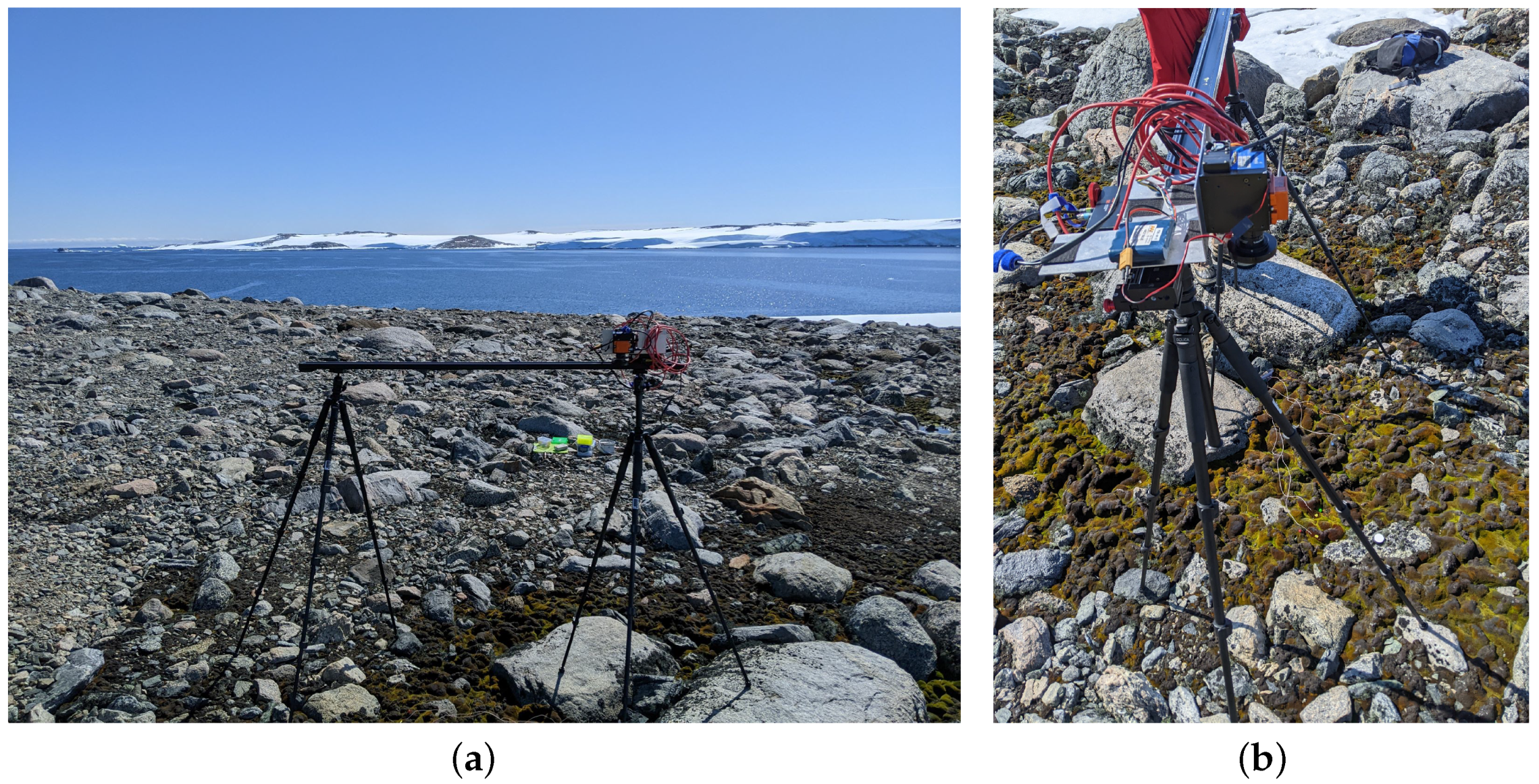
Figure 4.
Ground setup to collect HSI data in ASPA 135. (a) Careful placement of a Konova slider mounted to a pair of tripods on top of rocks to collect scans above fragile vegetation. (b) Side view of the ground setup, featuring a Headwall Hyperspec Nano hyperspectral camera pointing to the ground.
Figure 4.
Ground setup to collect HSI data in ASPA 135. (a) Careful placement of a Konova slider mounted to a pair of tripods on top of rocks to collect scans above fragile vegetation. (b) Side view of the ground setup, featuring a Headwall Hyperspec Nano hyperspectral camera pointing to the ground.
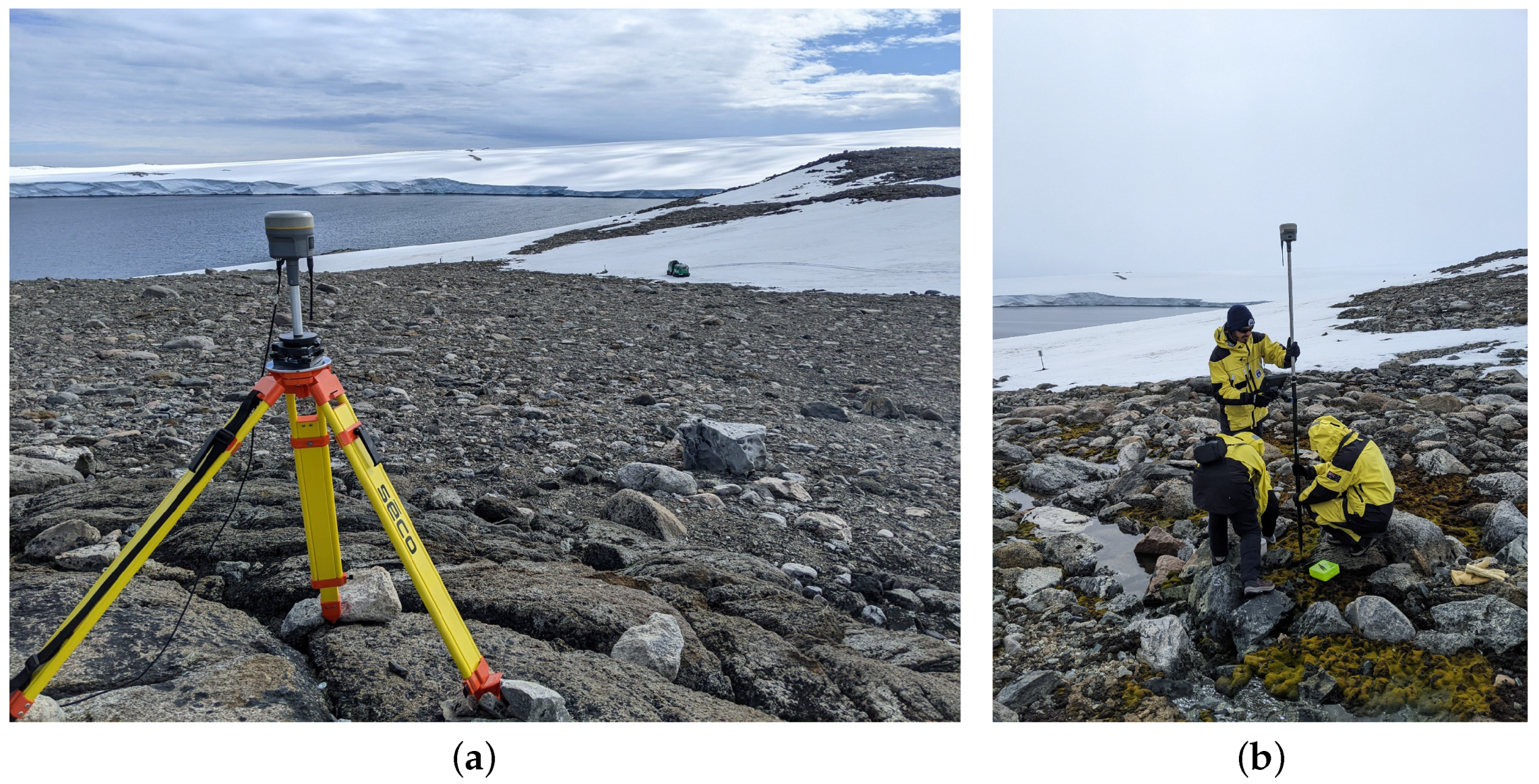
Figure 5.
Setup to collect GNSS points using a Trimble GNSS kit. (a) Base setup using a Trimble R10 antenna placed in a fixed marker with known GNSS coordinates. (b) Rover setup using a Trimble R10 antenna for precise GNSS RTK data collection, observing how expeditioners ensured the “no-step” rule over fragile vegetation.
Figure 5.
Setup to collect GNSS points using a Trimble GNSS kit. (a) Base setup using a Trimble R10 antenna placed in a fixed marker with known GNSS coordinates. (b) Rover setup using a Trimble R10 antenna for precise GNSS RTK data collection, observing how expeditioners ensured the “no-step” rule over fragile vegetation.
Figure 6.
Alignment example between collected MSI and HSI data in ASPA 135. (a) Georeferenced MSI orthomosaic covering half of ASPA 135 boundaries (in purple), highlighting the area of interest where HSI scans took place (bright green) and historical locations of moss beds (orange dots). (b) Zoomed-in preview of (a), showing resulting HSI scans aligned with the MSI raster. The orange dots illustrate GNSS coordinates of historical quadrat locations of moss beds. (c) Zoomed-in preview of (b), depicting three HSI scans, providing high spectral and spatial resolutions of studied moss beds.
Figure 6.
Alignment example between collected MSI and HSI data in ASPA 135. (a) Georeferenced MSI orthomosaic covering half of ASPA 135 boundaries (in purple), highlighting the area of interest where HSI scans took place (bright green) and historical locations of moss beds (orange dots). (b) Zoomed-in preview of (a), showing resulting HSI scans aligned with the MSI raster. The orange dots illustrate GNSS coordinates of historical quadrat locations of moss beds. (c) Zoomed-in preview of (b), depicting three HSI scans, providing high spectral and spatial resolutions of studied moss beds.
Figure 7.
Illustration of the training sample collection process from an HSI scan. (a) RGB preview of a sample HSI scan displaying a portion of a moss bed that contains the three health classifications, black lichen, bare rocks, ice, plastic, the spectralon (white circle in the middle), and metal from the tripod legs. (b) Polygons highlighting homogeneous areas corresponding to each one of the five classes.
Figure 7.
Illustration of the training sample collection process from an HSI scan. (a) RGB preview of a sample HSI scan displaying a portion of a moss bed that contains the three health classifications, black lichen, bare rocks, ice, plastic, the spectralon (white circle in the middle), and metal from the tripod legs. (b) Polygons highlighting homogeneous areas corresponding to each one of the five classes.
Figure 8.
Plot of the average spectral signatures for each class reveals the unique patterns of light absorption and reflection. These spectral signatures are used to identify specific wavelength bands for discriminating between moss and lichen classes.
Figure 8.
Plot of the average spectral signatures for each class reveals the unique patterns of light absorption and reflection. These spectral signatures are used to identify specific wavelength bands for discriminating between moss and lichen classes.
Figure 9.
Correlation heatmap illustrating the relationships between moss health ratings and various vegetation indices and statistical features.
Figure 9.
Correlation heatmap illustrating the relationships between moss health ratings and various vegetation indices and statistical features.
Figure 10.
Bar diagram of feature ranking, displaying the importance of different features in the model’s prediction. The importance scores represent the contribution of each feature, with higher scores indicating higher importance. (a) Model 1 (all features, including spectral bands). (b) Model 3 (only derivative features).
Figure 10.
Bar diagram of feature ranking, displaying the importance of different features in the model’s prediction. The importance scores represent the contribution of each feature, with higher scores indicating higher importance. (a) Model 1 (all features, including spectral bands). (b) Model 3 (only derivative features).
Figure 11.
Accuracy analysis after fitting ML models with a selected number of reduced ranked features. (a) Accuracy plot of Model 1, which contains all the features. (b) Accuracy plot of Model 3, which contains only derivative features.
Figure 11.
Accuracy analysis after fitting ML models with a selected number of reduced ranked features. (a) Accuracy plot of Model 1, which contains all the features. (b) Accuracy plot of Model 3, which contains only derivative features.
Figure 12.
Comparison of predictions from an HSI scan (a) among (b) Model 1; (c) Model 2; (d) Model 3; and (e) Model 4. The optimised models (Models 3 and 4) showcase comparable performance to the full-feature models, with reduced computational demands.
Figure 12.
Comparison of predictions from an HSI scan (a) among (b) Model 1; (c) Model 2; (d) Model 3; and (e) Model 4. The optimised models (Models 3 and 4) showcase comparable performance to the full-feature models, with reduced computational demands.
Figure 13.
Examples of final output maps using the proposed workflow. (a) Hyperspectral scans overlaid on georeferenced background maps. (b) Corresponding prediction maps of moss health at historical moss quadrats at ASPA 135.
Figure 13.
Examples of final output maps using the proposed workflow. (a) Hyperspectral scans overlaid on georeferenced background maps. (b) Corresponding prediction maps of moss health at historical moss quadrats at ASPA 135.
Table 1.
Total of labelled hyperspectral pixels per class using 11 HSI scans.
Table 1.
Total of labelled hyperspectral pixels per class using 11 HSI scans.
| Class | Name | Labelled Pixels |
|---|
| 1 | Moss (healthy) | 14,060 |
| 2 | Moss (stressed) | 12,914 |
| 3 | Moss (moribund) | 17,549 |
| 4 | Lichen (black) | 7972 |
| 5 | Non-vegetated | 56,976 |
| | Total | 109,471 |
Table 2.
List of 21 established vegetation indices to classify moss health and lichen.
Table 2.
List of 21 established vegetation indices to classify moss health and lichen.
| Category | Name | Category | Name |
|---|
| Vegetation | Normalised Difference Vegetation Index (NDVI) [38] | Chlorophyll
and Pigment | Carotenoid Reflectance Index 1 (CRI1) [39] |
| Green Normalised Difference Vegetation Index (GNDVI) [40] | Carotenoid Reflectance Index 2 (CRI2) [39] |
| Modified Soil Adjusted Vegetation Index (MSAVI) [41] | Photochemical Reflectance Index (PRI) [42] |
| Enhanced Vegetation Index (EVI) [43] | Red–Green Ratio Index (RGRI) [44] |
| Mean Red Edge (MRE) [45] | Modified Chlorophyll Absorption Ratio Index (MCARI) [46] |
| Simple Ratio Index (SRI) [47] | Stress
and Disease | Atmospherically Resistant Vegetation Index (ARVI) [48] |
| Normalised Difference Red Edge (NDRE) [45] | Modified Red-Edge Simple Ratio (MRESR) [49] |
| Green Leaf Index (GLI) [50] | Other | Triangular Vegetation Index (TVI) [51] |
Water
Content | Normalised Difference Water Index (NDWI) [52] | Transformed Chlorophyll Absorption Reflectance Index (TCARI) [53] |
| Water Band Index (WBI) [54] | Anthocyanin Reflectance Index 2 (ARI2) [55] |
| | Excess Green (ExG) [56] |
Table 3.
List of new indices proposed in this study to aid and highlight spectral responses among stages of moss health and lichen classes.
Table 3.
List of new indices proposed in this study to aid and highlight spectral responses among stages of moss health and lichen classes.
| Name | Equation | Name | Equation |
|---|
| Normalized Difference Lichen Index (NDLI) | | Moss Triple Health Index (MTHI) | |
| Healthy–Moribund Moss Index (HMMI) | | Inverse Moss Health Index (IMHI) | |
| Healthy–Stressed Moss Index (HSMI) | | Normalised Difference Moss–Lichen Index (NDMLI) | |
| Stressed–Moribund Moss Index (SMMI) | | | |
Table 4.
Comparison among the four tested models with total input features.
Table 4.
Comparison among the four tested models with total input features.
| Model | Description and Model Input | Input Features |
|---|
| 1 | A classifier incorporating over 200 reflectance bands from HSI scans, plus spectral indices, and statistical features. | 288 |
| 2 | An optimised version of Model 1, where feature selection techniques are applied to choose the best features from the original set. | 79 |
| 3 | A classifier that uses derivative features only, including spectral indices and statistical features. | 32 |
| 4 | An optimised instance of Model 3, employing feature selection to pinpoint the best derivative features for classification. | 23 |
Table 5.
Comparison between prediction, recall, and F-score results per feature class of the four proposed ML models.
Table 5.
Comparison between prediction, recall, and F-score results per feature class of the four proposed ML models.
| Class | Metric | Model 1 | Model 2 | Model 3 | Model 4 |
|---|
| Moss (healthy) | Precision | 0.99 | 1.00 | 0.99 | 0.99 |
| Recall | 1.00 | 1.00 | 1.00 | 0.99 |
| F1-score | 1.00 | 1.00 | 1.00 | 0.99 |
| Moss (stressed) | Precision | 1.00 | 0.98 | 1.00 | 0.97 |
| Recall | 0.98 | 0.99 | 0.98 | 0.98 |
| F1-score | 0.99 | 0.98 | 0.99 | 0.98 |
| Moss (moribund) | Precision | 0.98 | 0.96 | 0.97 | 0.94 |
| Recall | 0.98 | 0.98 | 0.98 | 0.97 |
| F1-score | 0.98 | 0.97 | 0.98 | 0.96 |
| Lichen (black) | Precision | 0.92 | 0.91 | 0.91 | 0.90 |
| Recall | 0.92 | 0.72 | 0.90 | 0.69 |
| F1-score | 0.92 | 0.80 | 0.91 | 0.78 |
| Non-vegetated | Precision | 0.99 | 0.97 | 0.99 | 0.97 |
| Recall | 0.99 | 0.98 | 0.99 | 0.98 |
| F1-score | 0.99 | 0.98 | 0.99 | 0.97 |
Table 6.
Macro and weighted average values of the four proposed ML models.
Table 6.
Macro and weighted average values of the four proposed ML models.
| Metric | Average | Model 1 | Model 2 | Model 3 | Model 4 | Support | Class |
|---|
| Precision | Macro | 0.98 | 0.96 | 0.97 | 0.95 | 3322 | 1 |
| Weighted | 0.97 | 0.93 | 0.97 | 0.92 | 2485 | 2 |
| Recall | Macro | 0.97 | 0.95 | 0.97 | 0.94 | 4405 | 3 |
| Weighted | 0.98 | 0.97 | 0.98 | 0.96 | 1465 | 4 |
| F1-score | Macro | 0.98 | 0.97 | 0.98 | 0.96 | 15,239 | 5 |
| Weighted | 0.98 | 0.97 | 0.98 | 0.96 | | |
| Accuracy | 0.98 | 0.97 | 0.98 | 0.96 | 26,916 | Total |
Table 7.
Mean accuracy and mean standard deviation values for Model 1 and Model 3 after applying k-fold cross-validation using ten folds.
Table 7.
Mean accuracy and mean standard deviation values for Model 1 and Model 3 after applying k-fold cross-validation using ten folds.
| Model | Mean Accuracy | Mean Standard Deviation |
|---|
| Model 1 | 0.95 | 0.017 |
| Model 3 | 0.95 | 0.009 |
Table 8.
Confusion matrix of the five feature classes, showing excellent performance in predicting the correct classes with only a few misclassifications.
Table 8.
Confusion matrix of the five feature classes, showing excellent performance in predicting the correct classes with only a few misclassifications.
| Class | Model | Moss (Healthy) | Moss (Stressed) | Moss (Moribund) | Lichen (Black) | Non-Vegetated |
|---|
| Moss (healthy) | 1 | 3318 | 1 | 0 | 0 | 3 |
| 2 | 3312 | 8 | 0 | 0 | 2 |
| 3 | 3321 | 1 | 0 | 0 | 0 |
| 4 | 3304 | 18 | 0 | 0 | 0 |
| Moss (stressed) | 1 | 17 | 2440 | 20 | 0 | 8 |
| 2 | 14 | 2461 | 10 | 0 | 0 |
| 3 | 16 | 2447 | 19 | 0 | 3 |
| 4 | 24 | 2441 | 20 | 0 | 0 |
| Moss (moribund) | 1 | 1 | 4 | 4309 | 2 | 89 |
| 2 | 2 | 47 | 4297 | 1 | 58 |
| 3 | 1 | 6 | 4315 | 9 | 74 |
| 4 | 3 | 50 | 4287 | 4 | 61 |
| Lichen (black) | 1 | 0 | 0 | 20 | 1350 | 95 |
| 2 | 0 | 0 | 28 | 1048 | 389 |
| 3 | 0 | 0 | 31 | 1325 | 109 |
| 4 | 0 | 0 | 33 | 1011 | 421 |
| Non-vegetated | 1 | 2 | 0 | 46 | 115 | 15,076 |
| 2 | 0 | 2 | 156 | 98 | 14,983 |
| 3 | 1 | 0 | 68 | 125 | 15,045 |
| 4 | 0 | 6 | 204 | 114 | 14,915 |


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}