

Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar

1
Faculty of Engineering, Ariel University, Ariel 40700, Israel
2
Faculty of Engineering, Tel Aviv University, Tel Aviv 39040, Israel
*
Author to whom correspondence should be addressed.
Remote Sens. 2023, 15(3), 782; https://doi.org/10.3390/rs15030782
Submission received: 20 November 2022
/
Revised: 16 January 2023
/
Accepted: 19 January 2023
/
Published: 30 January 2023
(This article belongs to the Special Issue Radar Techniques and Imaging Applications)
Abstract
:This paper describes a coherent multi-dwell processing (CMDP) method for high velocity estimation and super-resolution in search and track, while search (TWS) radar modes use an un-conventional signal processing algorithm that exploits multi-dwell transmissions. The existence of the multi-dwell waveform is necessary for visibility needs by un-folding the target’s velocity and range ambiguity and is proposed to be utilized for high velocity estimation and super-resolution. In this paper, the proposed scheme is shown to result in improved velocity estimation and doppler resolution performance for un-ambiguous targets in comparison to classical radar processing. The processing concept uses the same transmitted waveform (WF) and time duration without the need to increase the time on target (TOT) through sophisticated coherent concatenation of the received dwells with velocity compensation between the dwells. The phase compensation in receive mode is implemented for each target according to its characteristics, which means that target velocities are estimated in each dwell separately. The notable result of the CMDP is the linear doppler resolution improvement obtained with the given search resources and without knowing the target characteristics in advance or the dwell delay time. Other possible benefits of this process are the ability to achieve larger detection ranges and high-angle measurement precisions in search mode due to the higher signal-to-noise ratio (SNR) of the extended dwell and the ability to track more targets due to efficient time and resource management. An outstanding opportunity to exploit the CMDP is by combining missions in phased array (PA) radars, meeting the multi-objective needs of both high spatial scan rates for illuminating the target and high doppler estimation and resolution performance.
Keywords:
phased array; AESA; super-resolution; radar; DBF; doppler; visibility map; TWS; revisit time; PRF; TOT; estimation1. Introduction
Phased-array (PA) technology is conventionally used in the military for radar and satellite applications [1]. This technology has many performance advantages in comparison to conventional mechanical scan antennas [2], such as multi-functionality and flexibility in using special and dedicated beams with adequate waveform parameters according to the target demand. The performance of radar is widely affected by many technical parameters [3], including the spatial scanning pattern and waveform parameters.
It is common to implement PA radars with multi-functionality by using resource management allocations in search and tracking missions. The search beams are scheduled according to the revisit time constraints, meeting the multi-objective needs of both illuminating the target and obtaining the required doppler estimation and resolution that are directly derived from the SNR and the dwell duration [4]. This tradeoff between the spatial coverage, subjected to the revisit time constraints, and the desired velocity resolution, which is upper bounded by the FFT windowing of the dwell duration, is a key consideration in radar design [5]. Usually, in AESA radars, the design principle of the search mode is calculated according to the nearest and farthest coverage, where the nearest target defines the revisit time constraints and the farthest target defines the minimal SNR. Such a typical radar search mode is necessarily designed with a multi-PRI waveform for high visibility performance by solving the range and doppler ambiguities caused by radar parameters. However, the separate processing of each dwell does not utilize the whole burst transmission time to obtain the best velocity resolution and estimation.
Super resolution velocity and high velocity estimation have been popular in the academic world since they provide higher resolution than classical burst processing based on dwell’s interpolation techniques [6,7]. Considerable research has been conducted on velocity super-resolution using multiple signal classification (MUSIC) [8,9] algorithms and orthogonal frequency-deviation multiplexing (OFDM) [10,11], taking into account the known number of targets. Moreover, the possibilities of reducing the average time on target (TOT) in pulse-doppler radar by sub-Nyquist techniques, including compressed sensing (CS) optimization [12], have also been carried out over the years, finding theoretical bounds. Some other studies used random PRIs to alleviate range and doppler ambiguities as well as to enhance electronic counter-countermeasure (ECCM) capabilities [13].
The present paper proposes a new approach for coherent processing across multiple dwells in radar for single and multiple targets, assuming a given scanning pattern, transmitted waveform and burst duration, using an analytical solution that is not affected by the dwell’s incoherency. Consequently, improved doppler resolution performance and SNR are achieved without the need to increase the TOT.
This paper is divided into three sections. In the first section, we state the theory and background of velocity super-resolution and estimation, the problem formulation and describe the upper bound performances. In the second section, we show a simulation for improving the velocity estimation of a single target by achieving a higher SNR. In the third section, an algorithm and simulation of velocity super-resolution will be presented, including numerous targets with varied velocities and incoherent dwells. Finally, the performances will be compared, and suggested radar implementations will be discussed, as well as further research.
2. Theoretical Background
2.1. Multi-PRI in Classical Radar Processing
The existence of the multi-dwell waveform in search mode is necessary for visibility needs, obtaining high range and velocity coverage by un-folding the target’s velocity and range ambiguities [14,15]. In addition, the radar has blind speeds and blind ranges that depend on the transmitted waveform. Figure 1 shows the visibility maps of two PRIs with blind markings that occur at multiples of the PRI and 1/PRI for range and velocity, respectively, due to the MTI filter, designated for clutter rejection, and the inability to receive during pulse transmission.
The common un-ambiguous region is the common domain of the un-ambiguous ranges and dopplers of all the dwells of the waveform.
where is the un-ambiguous visibility domain of and M is the number of dwells.
Plot detection probability is a function of the dwell’s SNR and the false alarm, where the SNR of a plot is dependent on the coherent dwell duration according to the following radar equation [16].
where is the peak transmitted power, is the duty cycle, are the antenna’s transmitted and received gain, respectively, is the radar cross-section (RCS), is the coherent integration duration, is the range, is the Boltzmann constant, is the absolute temperature and is the noise figure.
Coherent integration is typically used in radars, which means that both the target’s radar cross-section (RCS) and velocity are constant during the dwell as well as the range from the target.
The SNR of the target in the dwell is affected by both the match filter (MF), which is the correlation of the signal in the range axis, and the FFT, which is the processing in the velocity axis.
2.2. Theoretical Formulation
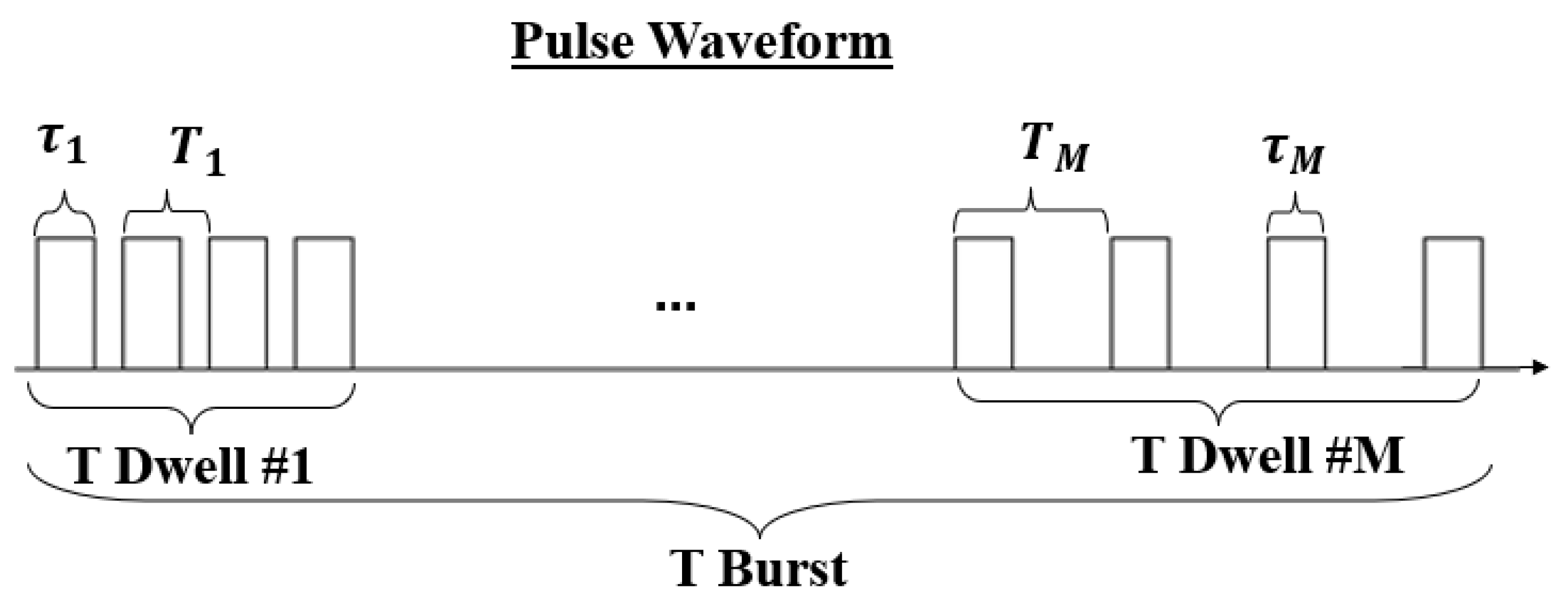
We consider the radar in Figure 2, with a waveform consisting of consecutive dwells, as illustrated in Figure 3.
The mth dwell contains comb of RF pulses of width , appearing at time intervals (which is the PRI within the mth dwell):
Here, is the amplitude, is the carrier frequency of the wave and
is a rectangular pulse with a temporal duration of , denotes the Dirac’s delta function and is a convolution. Given a radar burst composed of dwells with different PRIs, as depicted in Figure 3, the transmitted waveform is then:
We define the transmitted pulse train as:
Note that the transmission holds for the time interval .
The received signal is the reflected version of the transmitted waveform scattered from a target located at a range :
where is the speed of light.
The waveform characteristics are shown in Table 1.
Figure 4 shows a classical range-pulse map, expressing the received power from each pulse in all the ranges during the coherent single dwell, where the x-axis represents the “fast-time” and the y-axis represents the “slow-time”. Each received pulse is downconverted, matched and filtered. The signal peak on the x-axis expresses the target range and we can easily see that the target exists in the range of 3 km.
However, the detection process has not yet ended, and the velocity also needs to be determined with sufficient accuracy. This is performed by applying FFT across the y-axis and achieving the range-doppler (RD) map, from which the detected plot will later be derived using CFAR methods.
This paper will focus on the velocity accuracy and velocity resolution that are achieved by advanced signal processing on the range-pulse map and across the multi-dwell maps.
For a given range, the doppler frequency shifts of each received dwell were also detected. The complex amplitude is given by:
where is the carrier wavelength and is a constant amplitude. The instantaneous frequency of the IF signal is given by the doppler shift.
where is the radial velocity. Assuming a constant target velocity during the coherent burst, the range within the burst can be written as:
The resulting signal at the matched filter output is a sinusoidal tone at a constant frequency and phase .
The detected tone is sampled at discrete times related to the individual dwell PRI, as given by the following vector:
For instance, the resulting samples of the first dwell, where the duration of the pulses is , are:
for . Here, and are the in-phase and quadrature components of the nth sample, respectively, as illustrated in Figure 2. is the amplitude of the signal after the matched filter.
We obtained M non-uniform doppler sub-groups that cannot be processed together to derive the correct doppler frequency with a simple FFT. For this reason, in classical search radars, the dwells are processed separately, as shown in Figure 2. The concatenated vector that should be coherently processed is:
The significant disadvantage of separated dwell processing is the limitation of the doppler resolution, which is derived from the coherent of a single dwell. The velocity resolution obtained from a single mth dwell is bounded by:
The doppler resolution is achieved from the Fourier transform of signal in the ‘slow time’ (across the pulse axis). In practice, the FFT is performed on a bounded duration (dwell) that is equivalent to the time-window. Thus, a bounded doppler resolution is accepted with a resolution of , since it is the zero point of the sinc function in the frequency domain.
In the classical approach, the resolution may be improved by increasing the dwell duration , which means that the target is illuminated for a longer time.
In Chapter , a description of a coherent multi-dwell processing (CMDP) technique for a single target will be presented. The generalization of the CMDP for multiple targets is presented in Chapter 4, making it possible to process the whole waveform altogether while achieving both velocity super-resolution and high-velocity estimation.
3. CMDP for Single Target Estimation
CMDP algorithms exploit multi-PRI transmission by artificially producing an equal PRI. In our approach, a CMDP algorithm for phase compensation will be introduced, assuming a known velocity and coherency between the dwells. The known velocity can be evaluated from any single dwell, and the idea of using it is popular in various radar techniques, such as MIMO radars [19] and stepped frequency modulated (SFM) radars [20].
3.1. CMDP Model
We demonstrate the technique, considering M = 3 dwells, with three different PRIs, one for each dwell, as follows:
The three vectors are concatenated, as in (9), to obtain a vector with elements:
For simplicity and without a lack of generalization, we assume that and in different dwells are equal to preserve equal SNR and accuracy per dwell.
The real scenario model consists of a signal mixed with noise; hence:
where , denoting the single pulse SNR for the target’s sample.
The FFT will be, with respect to sampling period and by setting the appropriate coefficient, applicable despite the non-uniform PRIs. For M dwells, the expression for the FFT is:
For M = 3:
where the coefficients are set to be:
The final expression for the FFT is:
It can be shown from Equation (14) that by setting the appropriate coefficients we derived an expression with a single PRI and consequently the FFT is applicable over the multi-dwell.
We demonstrate the technique for a moving target with a radial velocity of . The radar transmits pulses per M = 3 dwells. The respective PRIs are . Figure 5 presents a comparison between the velocity estimated when a single dwell is processed and when multiple dwells (M = 3) are coherently processed in our CMDP algorithm.
An inspection of Figure 5 reveals an improved intensity, which is expressed as an increased SNR and consequently better radar measurement accuracies.
3.2. CMDP vs. Interpolation for Un-synchronized Dwells
In this section, we compare the sinc interpolation to the CMDP. The sinc interpolation method is used for coherent dwell concatenation by artificially converting the different PRIs sampled along the multi-dwell into an equivalent uniform sampling [6,7].
The interpolation method has severe drawbacks when the dwells are not synchronized and have additional delay time between them, while the CMDP is much less sensitive to time delay since the method estimates the velocity of each dwell and decreases it from the true velocity. Hence, the processing of each dwell is now performed in the baseband (), as described below:
Therefore, because the process is in the baseband and the frequencies are low, has less influence and after concatenating these two dwells into one longer signal, it effectively behaves similar to a single dwell.
However, in the interpolation method, two peaks may arise in the velocity spectrum. Let us assume that we have two different PRIs and delay times, then without the loss of generality, we assume and denote the signals as:
We interpolate to a new times vector, sampled from and reduce the interpolation error by using the sinc interpolation. The new times vector is:
The corresponding is a resampled version of at . After concatenating and we get:
Finally, to find the velocity we perform FFT on the concatenated signal and see an extra peak, which is a result of the time delay .
Figure 6 displays a comparison between the interpolation and CMDP methods for a single target with ; ; .
In Figure 6, we see the deceptive two peaks with estimation error by the interpolation method in comparison to the analytic method of CMDP.
Similarly, phase compensation in Rx could be implemented for multiple targets, for which velocities had been detected and measured by the single dwell. Furthermore, multi-resolution could be achieved for each target according to the desired goal by setting a compatible multi-dwell duration.
4. CMDP Algorithm for Multiple Target Estimation and Resolution
In this section, the CMDP is developed for the general multi-target case based on a different approach to the CMDP algorithm. The algorithm will show the benefits of velocity estimation as well as doppler resolution and SNR improvement.
CMDP Algorithms
We propose an iterative method to detect targets from multi-PRI dwells, as displays in the flow chart in Figure 7. Starting with the first dwell, we detect all target velocities that passed a preset threshold and put all of them in a list L. Then, we run over all the targets and fix all M dwells with the same velocity (one target is fixed, other targets potentially ruined); afterwards, we concatenate all the fixed dwells and detect again, now from M dwells, and ask whether a new target is revealed. It is important to note that at this stage, the targets are revealed because of a better resolution with M dwells. If only one target exists, go to the next target. Otherwise, more than one target is revealed, hence removing the current velocity and adding (at the end of the list) all the newly detected targets and trying to improve them again.
To estimate the target velocity from the multiple dwells, we fuse the estimated velocities from each dwell. In the general case of different velocity accuracies, we have a fusion estimation that is given by:
where is the weighted average estimation of the multi-dwell, is the estimated velocity from the mth dwell and the standard deviation is [21]:
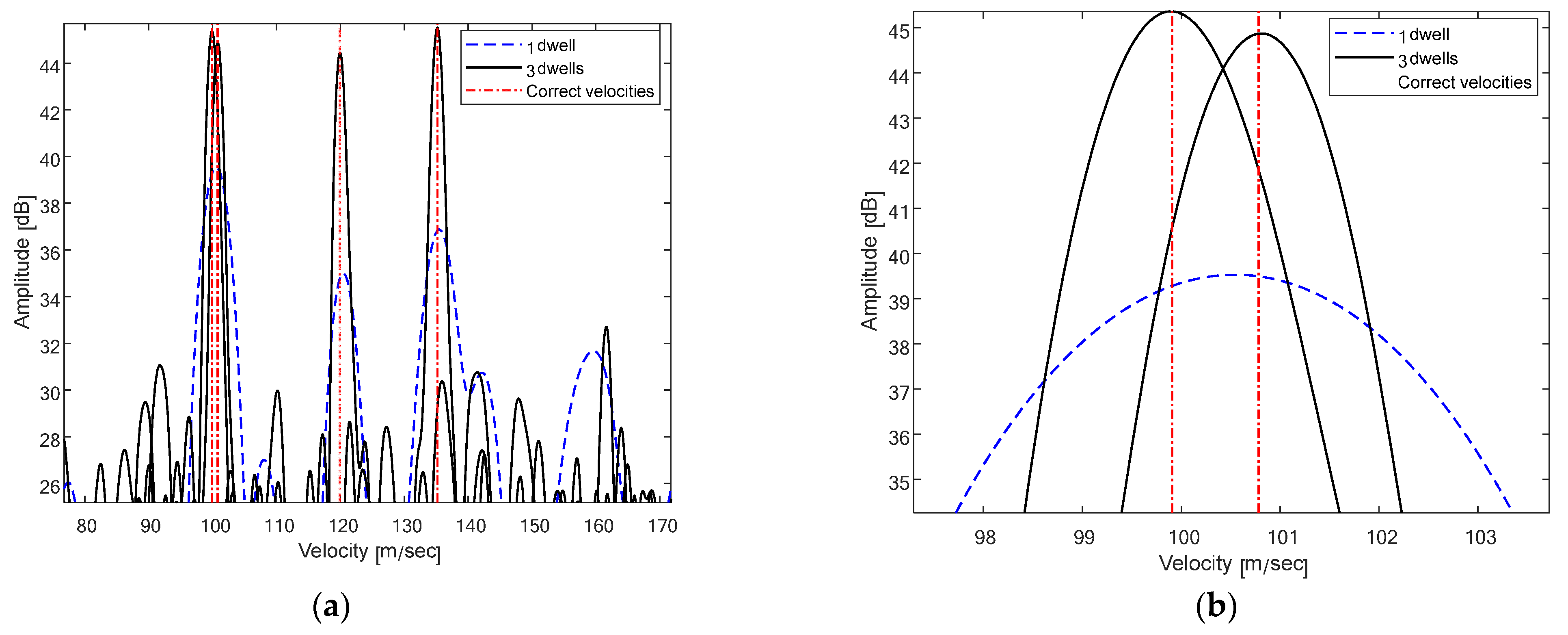
We demonstrate the CMDP algorithm for multiple targets with radial velocities of and use Blackman windowing in CMDP. For equal velocity error in each dwell, and DC are the same. Thus, from (19), the weighed velocity is a simple average.
Figure 8 shows a comparison between single and multi-dwell processing.
5. Conclusions
In this paper, we showed that velocity super-resolution and high estimation in search radars are achievable by using an un-conventional signal processing algorithm that exploits multi-dwells transmission. The notable result of the CMDP is the linear doppler resolution improvement for radars with un-synchronized dwells, obtained by smart coherent concatenation of the received dwells, with delay time compensation and without prior knowledge of the velocities. Actually, a diverse resolution could be achieved by adapting appropriate coherent time frames and producing the desired resolution.
Optional applications of using this algorithm are in TWS radars by saving the search resources and therefore increasing the number of tracked target capabilities. Moreover, computational resources are saved for high doppler resolutions with long burst processing by alleviating the need to maintain coherency between all dwells. An outstanding opportunity to exploit the CMDP is by combining a drone mission [22] in phased array (PA) radars, meeting the multi-objective needs of both a high spatial scan rate for illuminating the target and high doppler resolution performances. In addition, an SNR improvement is achieved and consequently better range detection, as well as radar parameter accuracies, such as velocity and angle.
Further research could be conducted in the case of an incoherent range using keystone techniques [23] for target focusing and by expanding the high-resolution algorithm to ambiguous targets.
Author Contributions
B.L., L.M. and S.S. wrote and performed the simulations; B.L., L.M., S.S. and Y.P. conceived the theory; B.L., L.M. and S.S. wrote the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
All data included in this study are available upon request by contacting the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Brookner, E. Developments and breakthroughs in radars and phased-arrays. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Bocon, R.J.; McGree, T.; Renfro, J. Phased array performance characteristics and compliance with SATCOM military standards. In Proceedings of the MILCOM 2005–2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005; pp. 1712–1718. [Google Scholar]
- Skolnik, M. Radar Handbook, Edition 2; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Scheer, J.; Holm, W.A. Principles of Modern Radar; SciTech Pub: Raleigh, NC, USA, 2010. [Google Scholar]
- Porat, B. Digital Processing of Random Signals: Theory and Methods; Dover Publications: Mineola, NY, USA, 2008. [Google Scholar]
- Sarkar, T.K.; Koh, J. Coherent Processing Across Multiple Staggered Pulse Repetition Interval (PRI) Dwells in Radar; Syracuse Univ NY Office Of Sponsored Programs: New York, NY, USA, 2004. [Google Scholar]
- Setsu, M.; Hayashi, T.; He, J.; Kidera, S. Super-Resolution Doppler Velocity Estimation by Kernel-Based Range–$\tau $ Point Conversions for UWB Short-Range Radars. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2430–2443. [Google Scholar] [CrossRef]
- Liu, Z.; Quan, Y.; Wu, Y.; Xing, M. Super-Resolution Range and Velocity Estimations for SFA-OFDM Radar. Remote Sens. 2022, 14, 278. [Google Scholar] [CrossRef]
- Kim, B.S.; Jin, Y.; Lee, J.; Kim, S. High-Efficiency Super-Resolution FMCW Radar Algorithm Based on FFT Estimation. Sensors 2021, 21, 4018. [Google Scholar] [CrossRef]
- Zheng, L.; Wang, X. Super-resolution delay-Doppler estimation for OFDM passive radar. IEEE Trans. Signal Process. 2017, 65, 2197–2210. [Google Scholar] [CrossRef] [Green Version]
- Schweizer, B.; Knill, C.; Schindler, D.; Waldschmidt, C. Stepped-carrier OFDM-radar processing scheme to retrieve high-resolution range-velocity profile at low sampling rate. IEEE Trans. Microw. Theory Tech. 2017, 66, 1610–1618. [Google Scholar] [CrossRef] [Green Version]
- Cohen, D.; Eldar, Y.C. Reduced time-on-target in pulse Doppler radar: Slow time domain compressed sensing. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–4. [Google Scholar]
- Zhu, J.; Zhao, T.; Huang, T.; Zhang, D. Analysis of random pulse repetition interval radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Alabaster, C.M.; Hughes, E.J.; Matthew, J.H. Medium PRF radar PRF selection using evolutionary algorithms. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 990–1001. [Google Scholar] [CrossRef]
- Wiley, D.; Parry, S.; Alabaster, C.; Hughes, E. Performance comparison of PRF schedules for medium PRF radar. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 601–611. [Google Scholar] [CrossRef]
- Levanon, N. Radar Principles; John Wiley & Sons: New York, NY, USA, 1988. [Google Scholar]
- Buzzi, S.; Lops, M.; Venturino, L. Track-before-detect procedures for early detection of moving target from airborne radars. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 937–954. [Google Scholar] [CrossRef]
- Yu, J.; Xu, J.; Peng, Y.N.; Xia, X.G. Radon-Fourier transform for radar target detection (III): Optimality and fast implementations. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 991–1004. [Google Scholar] [CrossRef]
- Cohen, D.; Cohen, D.; Eldar, Y.C. High resolution FDMA MIMO radar. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2806–2822. [Google Scholar] [CrossRef]
- Wehner, D.R. High Resolution Rada; Norwood: Chicago, IL, USA, 1987. [Google Scholar]
- Barton, D.K.; Ward, H.R. Handbook of Radar Measurement; Artech House: Washington, DC, USA, 1984. [Google Scholar]
- Harman, S. A comparison of staring radars with scanning radars for UAV detection: Introducing the Alarm™ staring radar. In Proceedings of the 2015 European Radar Conference (EuRAD), Paris, France, 9–11 September 2015; pp. 185–188. [Google Scholar]
- Richards, M.A. The keystone transformation for correcting range migration in range-doppler processing. Pulse 2014, 1000, 1. [Google Scholar]
Figure 1.
Visibility map of (a) PRI1; (b) PRI2.
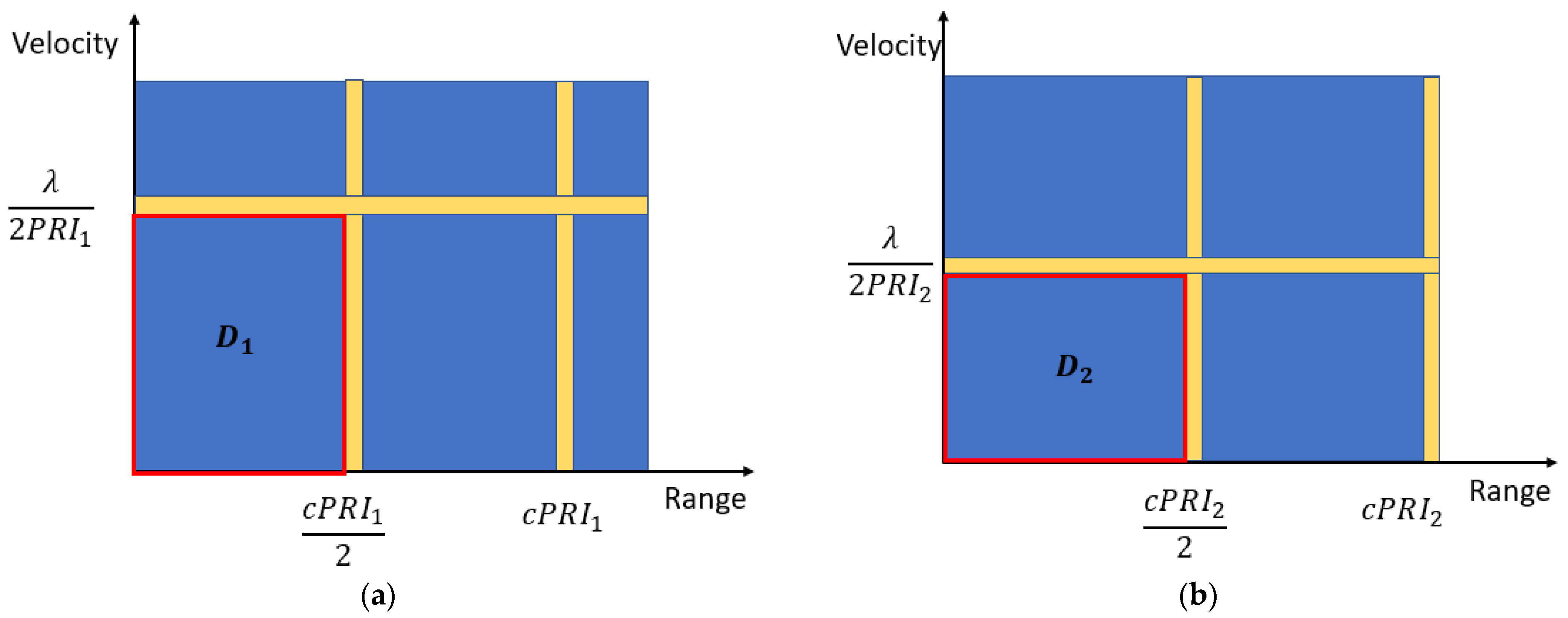
Figure 2.
Radar transceiver.

Figure 3.
Radar burst waveform.
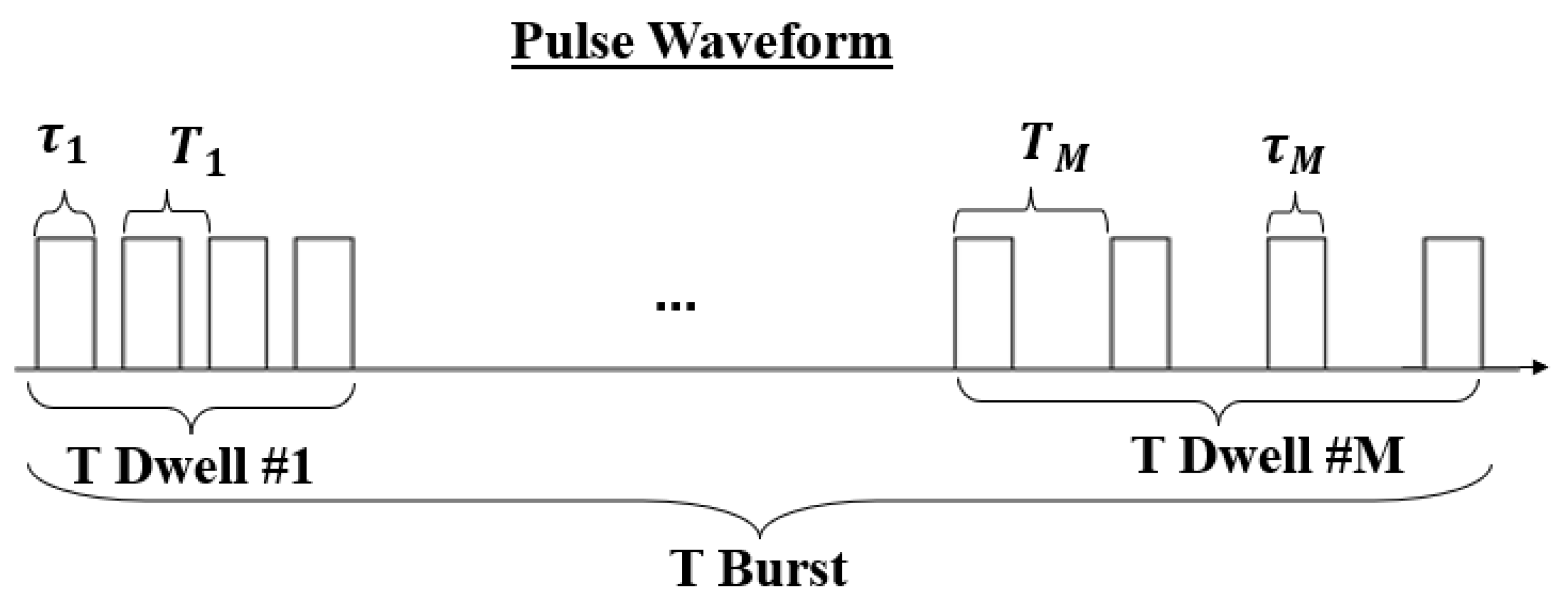
Figure 4.
Range-pulse map after matched filter processing in the fast time.
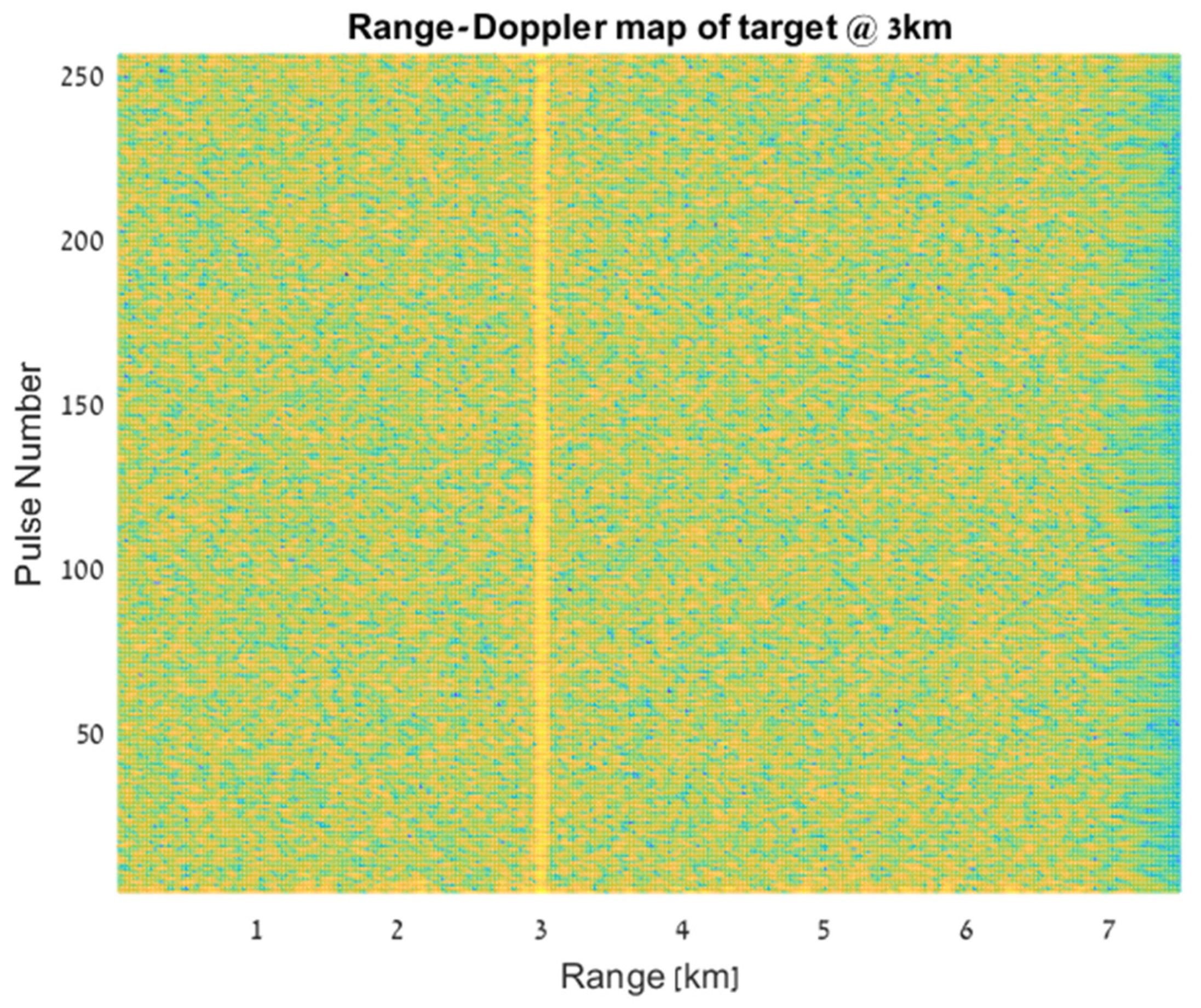
Figure 5.
Velocity estimation for single dwell and concatenated 3 dwells.
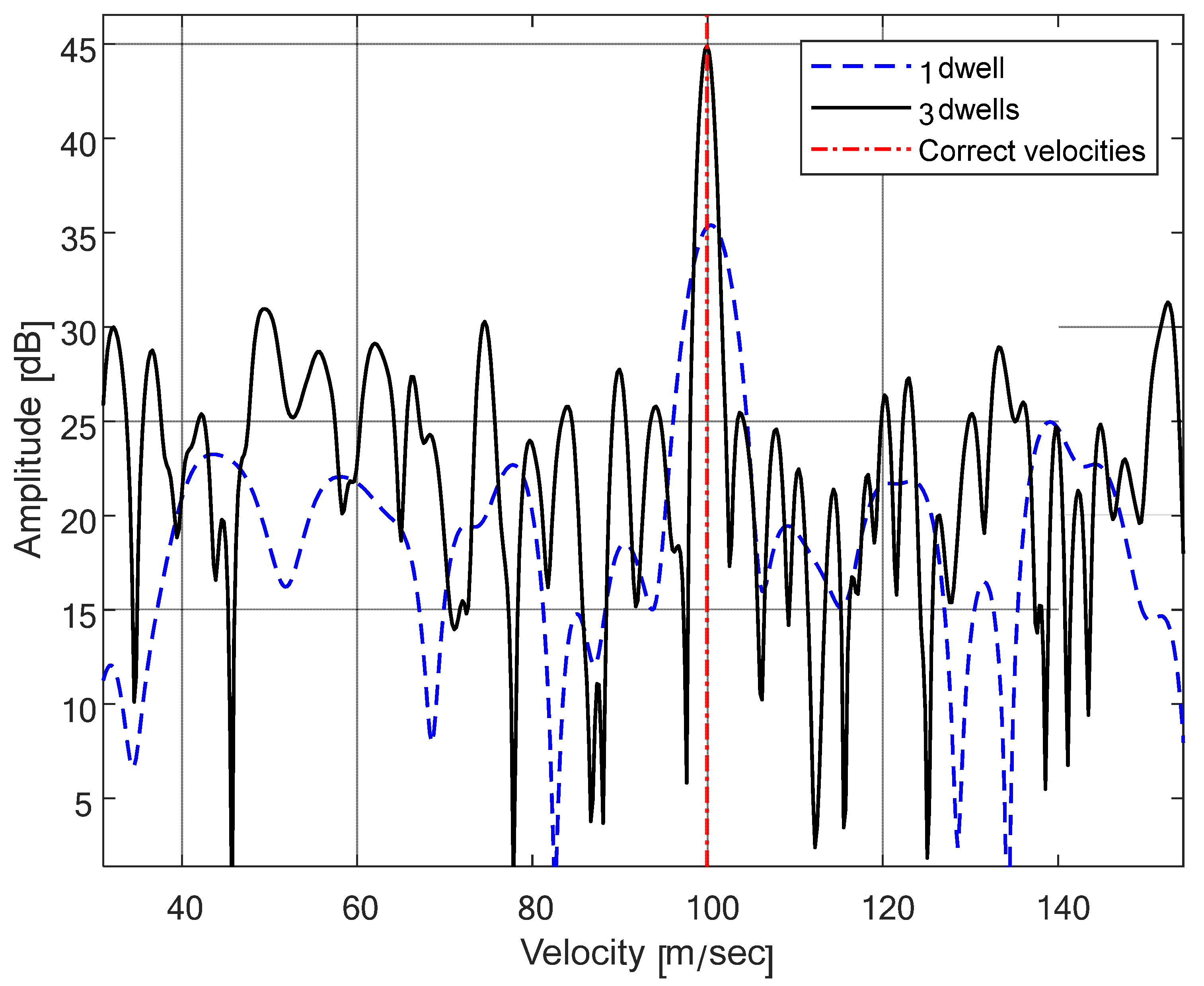
Figure 6.
CMDP vs. interpolation for un-synchronized dwells.
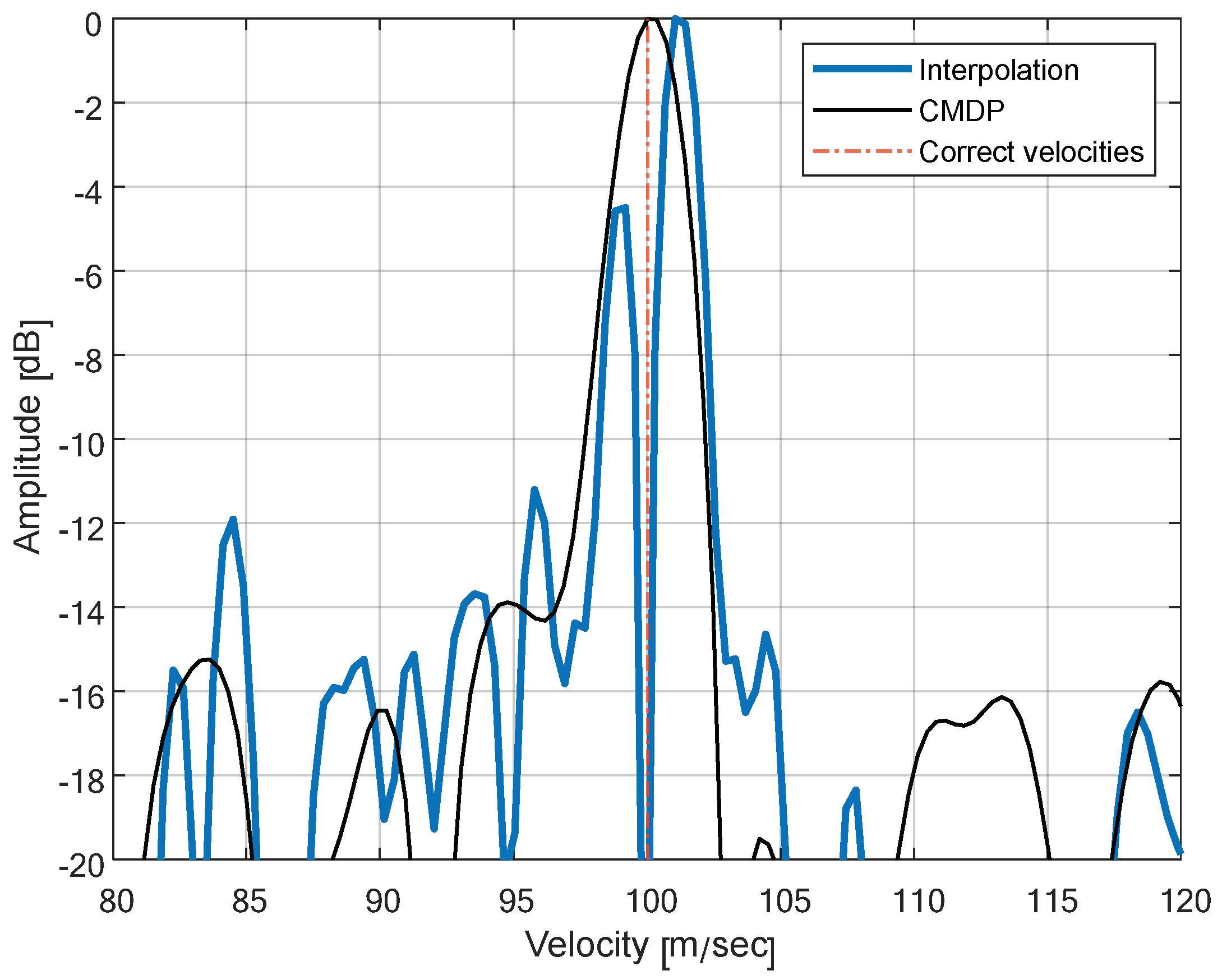
Figure 7.
CMDP Algorithm.
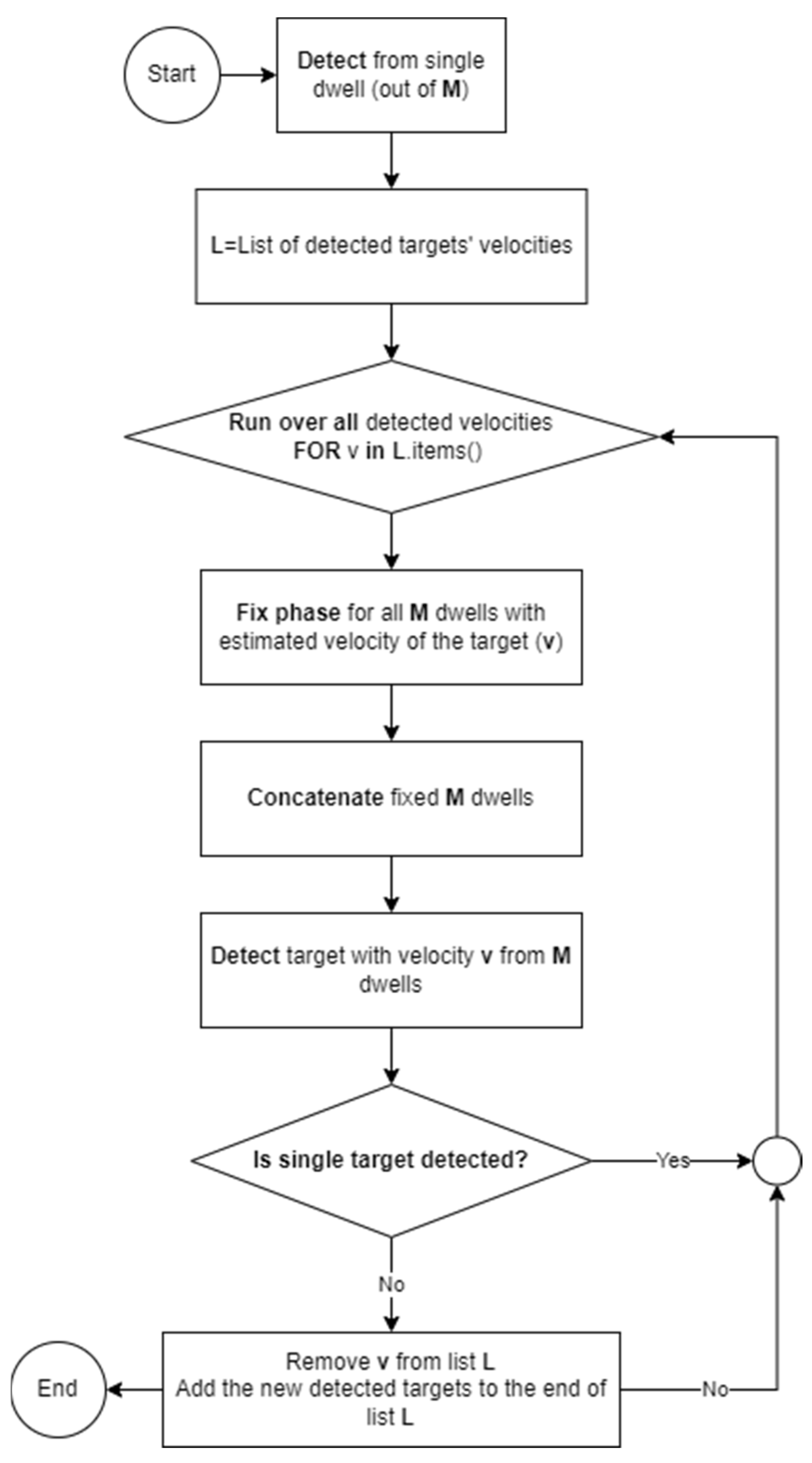
Figure 8.
CMDP simulation results. (a) Shows achieving both higher velocity estimation and improved SNR. (b) Shows that an additional real target has been detected as a result of the super-resolution.
Figure 8.
CMDP simulation results. (a) Shows achieving both higher velocity estimation and improved SNR. (b) Shows that an additional real target has been detected as a result of the super-resolution.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Waveform characteristics.
| Denotation | Symbol | Units |
|---|---|---|
| Carrier frequency | GHz | |
| Speed of light | m/s | |
| Wavelength | m | |
| Number of dwells | - | |
| Amplitude of the doppler signal from dwell m | - | |
| Number of pulses in dwell | - | |
| Pulse repetition interval of dwell | s | |
| Pulse duration in dwell | s | |
| Duty cycle of dwell | - | |
| Time on target of dwell | s | |
| Burst duration | s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Levy, B.; Maman, L.; Shvartzman, S.; Pinhasi, Y. Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar. Remote Sens. 2023, 15, 782. https://doi.org/10.3390/rs15030782
AMA Style
Levy B, Maman L, Shvartzman S, Pinhasi Y. Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar. Remote Sensing. 2023; 15(3):782. https://doi.org/10.3390/rs15030782
Chicago/Turabian StyleLevy, Benzion, Lior Maman, Shlomi Shvartzman, and Yosef Pinhasi. 2023. "Coherent Multi-Dwell Processing of Un-Synchronized Dwells for High Velocity Estimation and Super-Resolution in Radar" Remote Sensing 15, no. 3: 782. https://doi.org/10.3390/rs15030782
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.