
The Ground-Based Absolute Radiometric Calibration of the Landsat 9 Operational Land Imager

 , , and
, , and
Abstract
:1. Introduction
2. Methodology
2.1. Ground-Based Vicarious Radiometric Calibration
2.2. Automated Measurements: The Radiometric Calibration Test Site (RadCaTS)
2.2.1. RadCaTS Development
2.2.2. RadCaTS: Part of a Global Radiometric Calibration Network
2.2.3. Development of Custom Ground-Viewing Radiometers for RadCaTS
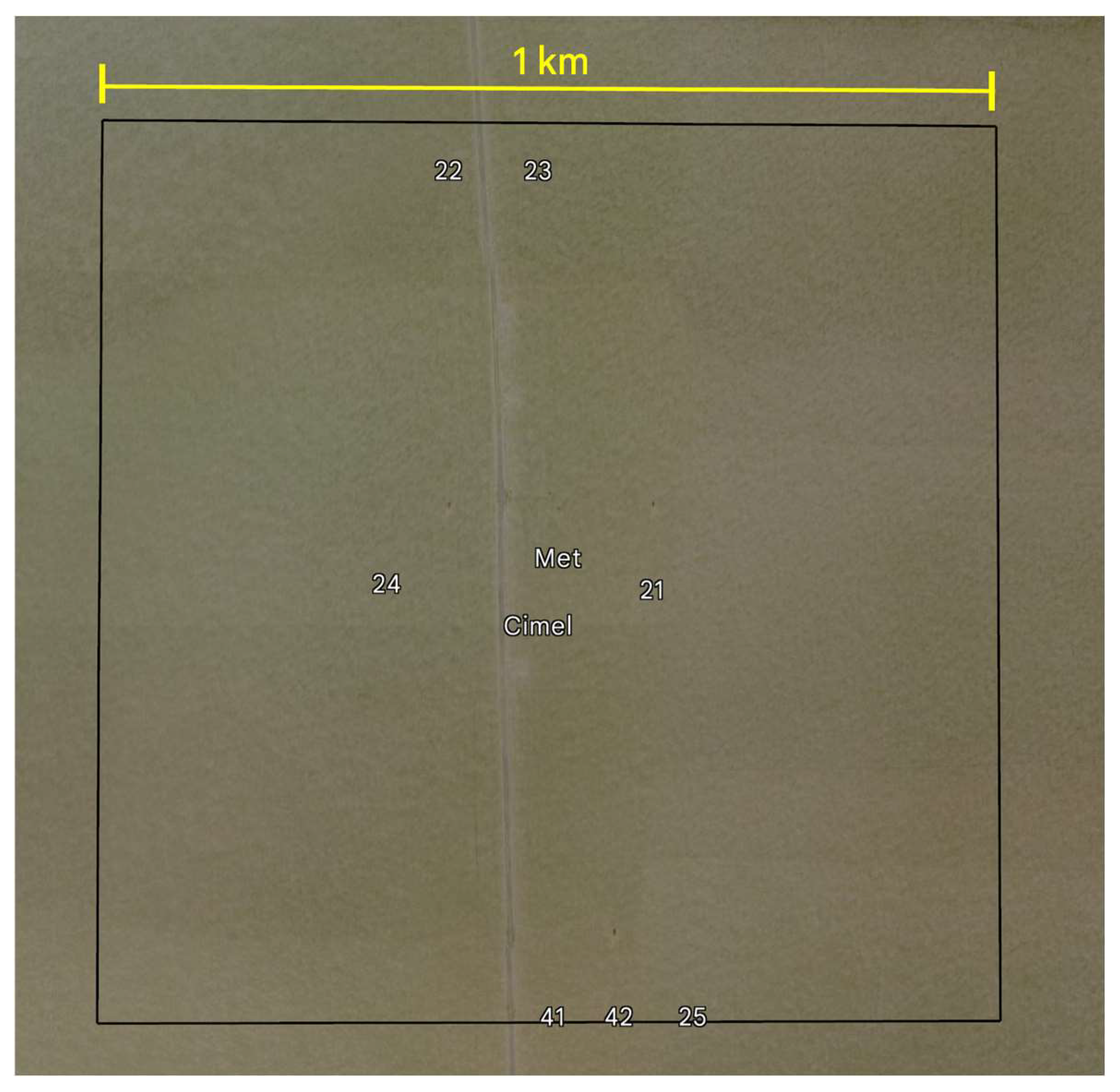
2.2.4. Railroad Valley, Nevada, USA
- Surface reflectance: >0.3, with the aim to reduce uncertainties in the path radiance.
- Spatial uniformity: to reduce uncertainties due to sensor misregistration during cross calibration studies.
- Large size: to reduce uncertainties from adjacency effects.
- Arid region: to reduce surface reflectance changes due to precipitation and/or the presence of clouds.
- High altitude: to reduce uncertainties in atmospheric characterization due to aerosols.
- Accessibility: in the 1990s, UArizona deployed a mobile lab pulled by a truck during field campaigns, so the test site had to be accessible with the truck and trailer.
2.2.5. Atmospheric Measurements at the RadCaTS
- Aerosol optical depth (AOD);
- Angstrom exponent;
- Columnar water vapor;
- Columnar ozone;
- Carbon dioxide.
2.2.6. Surface Reflectance Measurements at the RadCaTS
- Determine the surface BRF in each GVR channel.
- Calculate the spectral radiance measured by each GVR channel.
- Use a reference monthly average BRF for the diffuse sky irradiance (Esky) calculation.
- Obtain the processed AERONET data for the time of interest, including the AOD500nm, precipitable water vapor (WV) and Angstrom exponent.
- Download atmospheric data such as ozone and CO2 amount.
- Download ancillary data such as ambient temperature and barometric pressure from the on-site meteorological station at Railroad Valley.
- Use the AERONET measurements, the atmospheric data (CO2 and O3), and ambient temperature and pressure data as input into a radiative transfer code.
- Convert the multispectral GVR surface BRF to a hyperspectral BRF.
- Compute the average surface BRF for each of the eight GVR bands in order to obtain one multispectral surface BRF for the RadCaTS ROI.
- Perform a least-squares best fit of the multispectral surface BRF to a library of reference BRF values obtained with multispectral spectroradiometers.
- Compare the output hyperspectral surface BRF with the one used in 1b.
- If the average difference is higher than a predetermined value, rerun step 1 using the new hyperspectral surface BRF.
- Continue this process until the difference between the two values converge to being within the predetermined value. (Note: the wavelength regions used for this comparison are as follows: 400 nm to 1200 nm, 1500 nm to 1700 nm, and 2000 nm to 2250 nm. These spectral regions are chosen in order to avoid absorption regions in the atmosphere.)
- At this point, the hyperspectral surface BRF has been determined for the given time and date of interest.
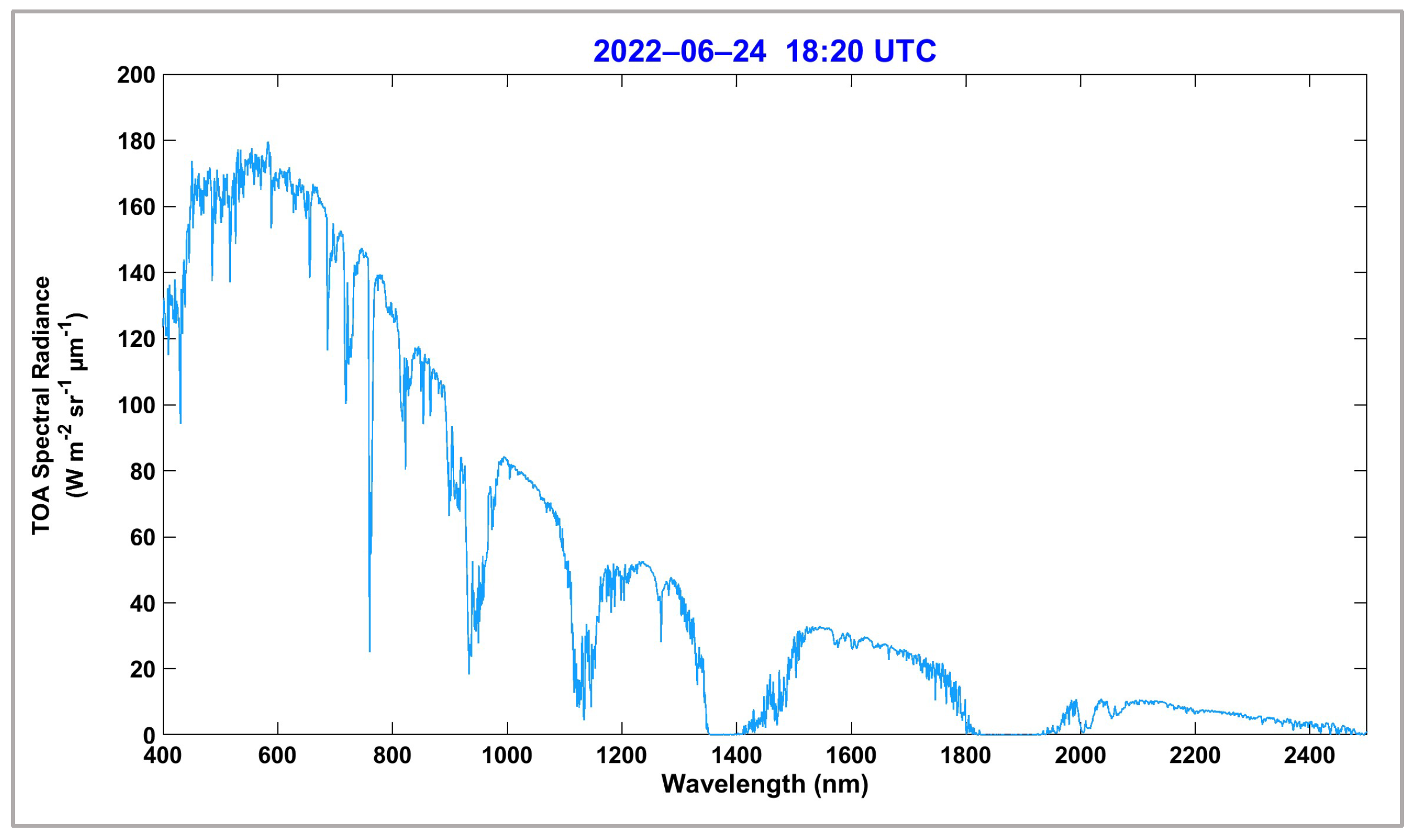
2.2.7. Determination of TOA Spectral Radiance and TOA Reflectance
2.3. On-Site Personnel: The Reflectance-Based Approach
2.3.1. Overview
2.3.2. Field Test Sites
2.3.3. Atmospheric Measurements
2.3.4. Surface Reflectance Measurements
2.3.5. TOA Spectral Radiance Determination
3. Data
3.1. Landsat 9 OLI Imagery
3.2. RadCaTS
3.3. Reflectance-Based Approach (SDSU, UArizona, and GSFC)
4. Results
4.1. RadCaTS Results
4.2. Reflectance-Based Results at SDSU
4.3. Reflectance-Based Results for UArizona and NASA GSFC at Ivanpah Playa
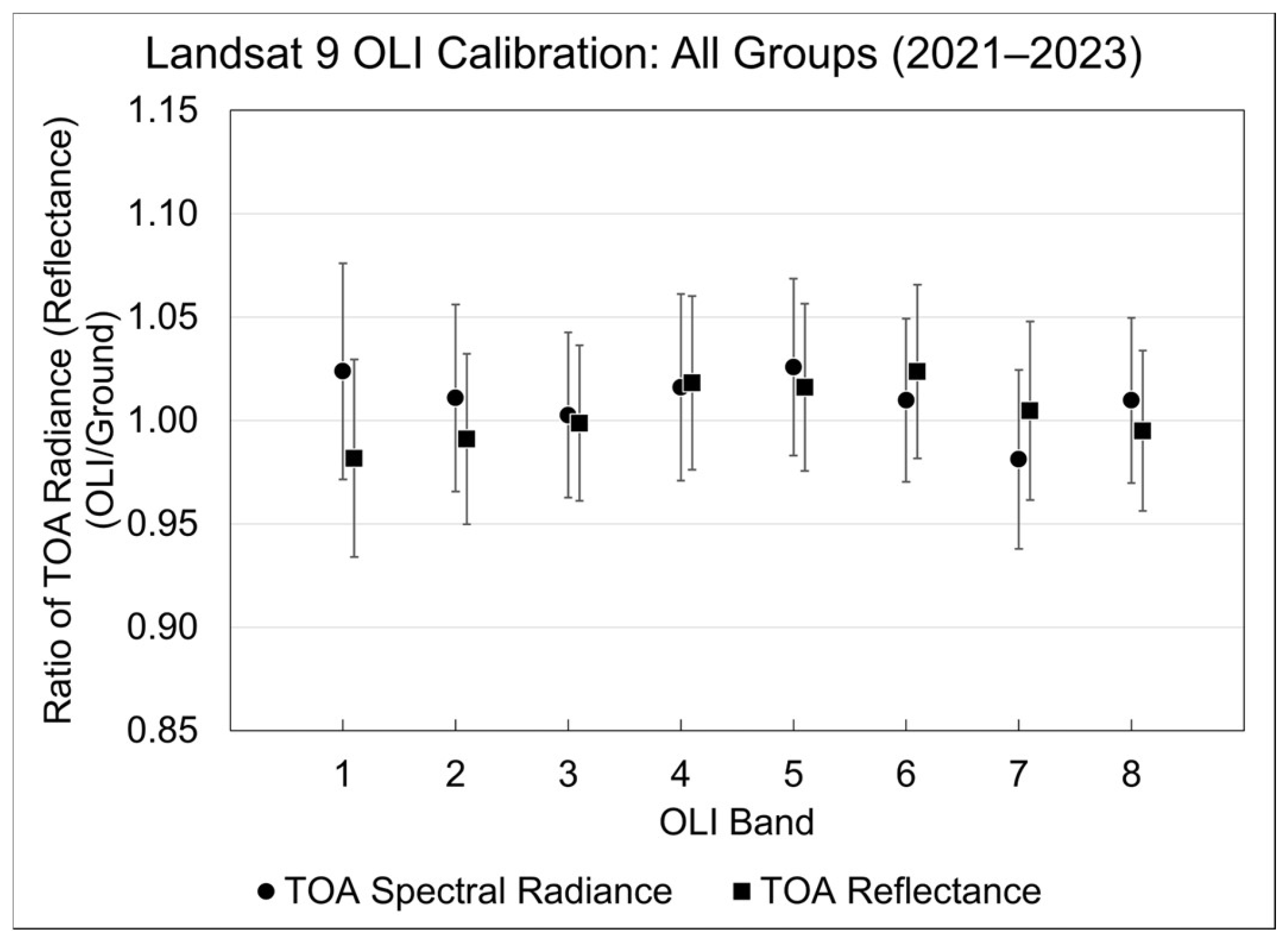
4.4. Summary of Combined Landsat 9 OLI Results
5. Uncertainty Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Loveland, T.R.; Anderson, M.C.; Huntington, J.L.; Irons, J.R.; Johnson, D.M.; Rocchio, L.E.; Woodcock, C.E.; Wulder, M.A. Seeing Our Planet Anew: Fifty Years of Landsat. Photogramm. Eng. Remote Sens. 2022, 88, 429–436. [Google Scholar] [CrossRef]
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering open science and applications through continuity. Remote Senssing Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Wulder, M.A.; Roy, D.P.; Radeloff, V.C.; Loveland, T.R.; Anderson, M.C.; Johnson, D.M.; Healey, S.; Zhu, Z.; Scambos, T.A.; Pahlevan, N. Fifty years of Landsat science and impacts. Remote Sens. Environ. 2022, 280, 113195. [Google Scholar] [CrossRef]
- Saralioglu, E.; Vatandaslar, C. Land use/land cover classification with Landsat-8 and Landsat-9 satellite images: A comparative analysis between forest- and agriculture-dominated landscapes using different machine learning methods. Acta Geod. Geophys. 2022, 57, 695–716. [Google Scholar] [CrossRef]
- Knight, E.J.; Kvaran, G. Landsat-8 Operational Land Imager Design, Characterization and Performance. Remote Sens. 2014, 6, 10286–10305. [Google Scholar] [CrossRef]
- Levy, R.; Markham, B.L. Landsat 9 Operational Land Imager2 (OLI2) diffuser panel response lab predictions vs. pre-launch measurements. In Proceedings of the Earth Observing Systems XXV, Online, 17 September 2020; pp. 103–117. [Google Scholar]
- Micijevic, E.; Haque, M.O.; Scaramuzza, P.; Storey, J.; Anderson, C.; Markham, B. Landsat 9 pre-launch sensor characterization and comparison with Landsat 8 results. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XXIII, Strasbourg, France, 10 October 2019; pp. 289–300. [Google Scholar]
- Markham, B.; Barsi, J.; Donley, E.; Efremova, B.; Hair, J.; Jenstrom, D.; Kaita, E.; Knight, E.; Kvaran, G.; McCorkel, J.; et al. Landsat 9: Mission Status and Prelaunch Instrument Performance Characterization and Calibration. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5788–5791. [Google Scholar]
- Barsi, J.A.; Markham, B.L.; McCorkel, J.; McAndrew, B.; Donley, E.; Morland, E.; Pharr, J.; Rodriguez, M.; Shuman, T.; Sushkov, A. The operational land Imager-2: Prelaunch spectral characterization. In Proceedings of the Earth Observing Systems XXIV, San Diego, CA, USA, 9 September 2019; pp. 35–45. [Google Scholar]
- Malone, K.J.; Schrein, R.J.; Bradley, M.S.; Irwin, R.; Berdanier, B.; Donley, E. Landsat 9 OLI 2 focal plane subsystem: Design, performance, and status. In Proceedings of the Earth Observing Systems XXII, San Diego, CA, USA, 5 September 2017; pp. 42–62. [Google Scholar]
- Bouvet, M.; Thome, K.; Berthelot, B.; Bialek, A.; Czapla-Myers, J.; Fox, N.P.; Goryl, P.; Henry, P.; Ma, L.; Marcq, S.; et al. RadCalNet: A Radiometric Calibration Network for Earth Observing Imagers Operating in the Visible to Shortwave Infrared Spectral Range. Remote Sens. 2019, 11, 2401. [Google Scholar] [CrossRef]
- Slater, P.N.; Biggar, S.F.; Thome, K.J.; Gellman, D.I.; Spyak, P.R. Vicarious Radiometric Calibrations of EOS Sensors. J. Atmos. Ocean. Technol. 1996, 13, 349–359. [Google Scholar] [CrossRef]
- Teillet, P.M.; Slater, P.N.; Ding, Y.; Santer, R.P.; Jackson, R.D.; Moran, M.S. Three Methods for the Absolute Calibration of the NOAA AVHRR Sensors In-Flight. Remote Sens. Environ. 1990, 31, 105–120. [Google Scholar] [CrossRef]
- Slater, P.N.; Biggar, S.F.; Holm, R.G.; Jackson, R.D.; Mao, Y.; Moran, M.S.; Palmer, J.M.; Yuan, B. Reflectance- and radiance-based methods for the in-flight absolute calibration of multispectral sensors. Remote Sens. Environ. 1987, 22, 11–37. [Google Scholar] [CrossRef]
- Wenny, B.; Thome, K.; Czapla-Myers, J. Evaluation of vicarious calibration for airborne sensors using RadCalnet. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XXIV, Online, 2 October 2020. [Google Scholar]
- Lau, I.C.; Ong, C.C.H.; Thome, K.J.; Wenny, B.; Mueller, A.; Heiden, U.; Czapla-Myers, J.; Biggar, S.; Anderson, N.; McGonigle, L.; et al. Intercomparison of Field Methods for Acquiring Ground Reflectance at Railroad Valley Playa for Spectral Calibration of Satellite Data. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 186–188. [Google Scholar]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Thome, K.; Biggar, S.; Helder, D.; Aaron, D.; Leigh, L.; Mishra, N. The Ground-Based Absolute Radiometric Calibration of Landsat 8 OLI. Remote Sens. 2015, 7, 600–626. [Google Scholar] [CrossRef]
- Thome, K.J. Absolute radiometric calibration of Landsat 7 ETM+ using the reflectance-based method. Remote Sens. Environ. 2001, 78, 27–38. [Google Scholar] [CrossRef]
- Shrestha, M.; Hasan, N.; Leigh, L.; Helder, D. Derivation of Hyperspectral Profile of Extended Pseudo Invariant Calibration Sites (EPICS) for Use in Sensor Calibration. Remote Sens. 2019, 11, 2279. [Google Scholar] [CrossRef]
- Russell, B.; Holt, J.; Durell, C.; Arnold, W.; Conran, D.; Schiller, S. The Flare: Network: Autonomous, On-Demand Spatial and Radiometric Calibration and Validation for Imaging Spectroscopy. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1615–1618. [Google Scholar]
- Holt, J.; Durell, C.; Russell, B.; Conran, D.; Arnold, W.; Schiller, S. FLARE network performance: Automated on-demand calibration for space, airborne and UAV assets. In Proceedings of the SPIE Defense + Commercial Sensing, Online, 12 April 2021. [Google Scholar]
- Slater, P.N. Radiometric considerations in remote sensing. Proc. IEEE 1985, 73, 997–1011. [Google Scholar] [CrossRef]
- Slater, P.N. The Importance and Atteinment of Accurate Absolute Radiometric Calibration. Remote Sens. Crit. Rev. Technol. 1984, 475, 34–41. [Google Scholar]
- Kastner, C.; Slater, P. In-Flight Radiometric Calibration of Advanced Remote Sensing Systems. In Proceedings of the 26th Annual Technical Symposium, Field Measurement and Calibration Using Electro-Optical Equipment, San Diego, CA, USA, 23 June 1983; pp. 158–165. [Google Scholar]
- Schaepman-Strub, G.; Schaepman, M.E.; Painter, T.H.; Dangel, S.; Martonchik, J.V. Reflectance quantities in optical remote sensing—Definitions and case studies. Remote Sens. Environ. 2006, 103, 27–42. [Google Scholar] [CrossRef]
- Ehsani, A.R.; Reagan, J.A.; Erxleben, W.H. Design and Performance Analysis of an Automated 10-Channel Solar Radiometer Instrument. J. Atmos. Ocean. Technol. 1998, 15, 697–707. [Google Scholar] [CrossRef]
- Thome, K.J.; Smith, M.W.; Palmer, J.M.; Reagan, J.A. Three-channel solar radiometer for the determination of atmospheric columnar water vapor. Appl. Opt. 1994, 33, 5811–5819. [Google Scholar] [CrossRef]
- Reagan, J.A.; Thome, K.J.; Herman, B.M. A Simple Instrument and Technique for Measuring Columnar Water Vapor via Near-IR Differential Solar Transmission Measurments. IEEE Trans. Geosci. Remote Sens. 1992, 30, 825–831. [Google Scholar] [CrossRef]
- Barreto, Á.; Cuevas, E.; Granados-Muñoz, M.J.; Alados-Arboledas, L.; Romero, P.M.; Gröbner, J.; Kouremeti, N.; Almansa, A.F.; Stone, T.; Toledano, C.; et al. The new sun-sky-lunar Cimel CE318-T multiband photometer—A comprehensive performance evaluation. Atmos. Meas. Tech. 2016, 9, 631–654. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanré, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A Federated Instrument Network and Data Archive for Aerosol Characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN6: A major upgrade of the MODTRAN radiative transfer code. In Proceedings of the 2014 6th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Lausanne, Switzerland, 24–27 June 2014. [Google Scholar]
- Czapla-Myers, J.; Thome, K.; Biggar, S. Unmanned vicarious calibration for large-footprint sensors. In Proceedings of the Earth Observing Systems X, San Diego, CA, USA, 22 August 2005; Volume 5882, pp. 416–425. [Google Scholar]
- Thome, K.J.; Czapla-Myers, J.S.; Biggar, S.F. Ground-monitor radiometer system for vicarious calibration. In Proceedings of the Imaging Spectrometry X, Denver, CO, USA, 15 October 2004; pp. 223–232. [Google Scholar]
- Czapla-Myers, J.S.; Thome, K.J.; Biggar, S.F. Optical sensor package for multiangle measurements of surface reflectance. In Proceedings of the Imaging Spectrometry VII, San Diego, CA, USA, 17 January 2002; pp. 326–333. [Google Scholar]
- Anderson, N.J.; Czapla-Myers, J.S. Ground viewing radiometer characterization, implementation and calibration applications: A summary after two years of field deployment. In Proceedings of the SPIE Optical Engineering+ Applications, San Diego, CA, USA, 23 September 2013; Volume 8866, pp. 185–194. [Google Scholar]
- Anderson, N.; Czapla-Myers, J.; Leisso, N.; Biggar, S.; Burkhart, C.; Kingston, R.; Thome, K. Design and calibration of field deployable ground-viewing radiometers. Appl. Opt. 2013, 52, 231–240. [Google Scholar] [CrossRef] [PubMed]
- Singh, R.; Czapla-Myers, J.; Anderson, N. Ground viewing radiometer equipped with autonomous linear motion: Two year field deployment summary and analysis. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CA, USA, 30 September 2022. [Google Scholar]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Biggar, S. Earth-observing satellite intercomparison using the Radiometric Calibration Test Site at Railroad Valley. J. Appl. Remote Sens. 2017, 12, 012004. [Google Scholar] [CrossRef]
- Markham, B.; Barsi, J.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 Operational Land Imager Radiometric Calibration and Stability. Remote Sens. 2014, 6, 12275–12308. [Google Scholar] [CrossRef]
- Czapla-Myers, J.S.; Anderson, N.J.; Biggar, S.F. Early ground-based vicarious calibration results for Landsat 8 OLI. In Proceedings of the Earth Observing Systems XVIII, San Diego, CA, USA, 23 September 2013; Volume 8866, pp. 205–214. [Google Scholar]
- Czapla-Myers, J.S.; Thome, K.; Biggar, S.; Anderson, N.J. The absolute radiometric calibration of Terra imaging sensors: MODIS, MISR, and ASTER. In Proceedings of the Earth Observing Systems XIX, San Diego, CA, USA, 2 October 2014. [Google Scholar]
- Yamamoto, H.; Czapla-Myers, J.; Tsuchida, S. Validation of Aster VNIR Radiometric Performance Using the Reflectance-Based Vicarious Calibration Experiments and RadCaTS Data. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 4316–4319. [Google Scholar]
- Tsuchida, S.; Yamamoto, H.; Kouyama, T.; Obata, K.; Sakuma, F.; Tachikawa, T.; Kamei, A.; Arai, K.; Czapla-Myers, J.S.; Biggar, S.F.; et al. Radiometric Degradation Curves for the ASTER VNIR Processing Using Vicarious and Lunar Calibrations. Remote Sens. 2020, 12, 427. [Google Scholar] [CrossRef]
- Tahersima, M.H.; Wenny, B.N.; Voskanian, N.; Thome, K. Intercomparison of Landsat and Joint Polar Satellite System using RadCalNet. In Proceedings of the Earth Observing Systems XXVII, San Diego, CA, USA, 30 September 2022; pp. 352–357. [Google Scholar]
- Czapla-Myers, J.S.; Anderson, N.J. Intercomparison of the GOES-16 and -17 Advanced Baseline Imager with low-Earth orbit sensors. In Proceedings of the Earth Observing Systems XXIV, San Diego, CA, USA, 9 September 2019. [Google Scholar]
- Czapla-Myers, J.; Anderson, N. Post-launch radiometric validation of the GOES-16 Advanced Baseline Imager (ABI). In Proceedings of the SPIE Remote Sensing, Berlin, Germany, 25 September 2018. [Google Scholar]
- Wenny, B.; Thome, K.; Czapla-Myers, J. Evaluation of vicarious calibration for airborne sensors using RadCalNet. J. Appl. Remote Sens. 2021, 15, 034501. [Google Scholar] [CrossRef]
- Bruegge, C.J.; Arnold, G.T.; Czapla-Myers, J.; Dominguez, R.A.; Helmlinger, M.C.; Thompson, D.R.; Van den Bosch, J.; Wenny, B. Vicarious Calibration of eMAS, AirMSPI, and AVIRIS Sensors during FIREX-AQ. TGARS 2021, 59, 10286–10297. [Google Scholar] [CrossRef]
- Martins, J.V.; Fernandez-Borda, R.; McBride, B.; Remer, L.; Barbosa, H.M.J. The Harp Hype Ran Gular Imaging Polarimeter and the Need for Small Satellite Payloads with High Science Payoff for Earth Science Remote Sensing. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6304–6307. [Google Scholar]
- Houborg, R.; McCabe, M.F. A Cubesat enabled Spatio-Temporal Enhancement Method (CESTEM) utilizing Planet, Landsat and MODIS data. Remote Sens. Environ. 2018, 209, 211–226. [Google Scholar] [CrossRef]
- Wilson, N.; Greenberg, J.; Jumpasut, A.; Collison, A.; Weichelt, H. Absolute Radiometric Calibration of Planet Dove Satellites, Flocks 2p & 2e; Planet: San Francisco, CA, USA, 2017. [Google Scholar]
- Pack, D.; Ardila, D.; Herman, E.; Rowen, D.; Welle, R.; Wiktorowicz, S.; Hattersley, B. Two Aerospace Corporation CubeSat Remote Sensing Imagers: CUMULOS and R3. In Proceedings of the AIAA/USU Small Satellite Conference, Logan, UT, USA, 8 August 2017. [Google Scholar]
- Marchant, A.B. Design and demonstration of a CubeSat-scale spatial heterodyne imaging spectrometer. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CA, USA, 19 September 2016. [Google Scholar]
- Verstraete, M.M.; Diner, D.J.; Bézy, J.-L. Planning for a spaceborne Earth Observation mission: From user expectations to measurement requirements. Environ. Sci. Policy 2015, 54, 419–427. [Google Scholar] [CrossRef]
- Belward, A.S.; Skøien, J.O. Who launched what, when and why; trends in global land-cover observation capacity from civilian earth observation satellites. ISPRS J. Photogramm. Remote Sens. 2015, 103, 115–128. [Google Scholar] [CrossRef]
- Puschell, J.J.; Stanton, E. CubeSat modules for multispectral environmental imaging from polar orbit. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CA, USA, 23 October 2012. [Google Scholar]
- Naughton, D.; Brunn, A.; Czapla-Myers, J.; Douglass, S.; Thiele, M.; Weichelt, H.; Oxfort, M. Absolute radiometric calibration of the RapidEye multispectral imager using the reflectance-based vicarious calibration method. J. Appl. Remote Sens. 2011, 5, 053544. [Google Scholar] [CrossRef]
- Brunn, A.; Naughton, D.; Weichelt, H.; Douglass, S.; Thiele, M.; Oxfort, M.; Beckett, K. The calibration procedure of the multispectral imaging instruments on board the RapidEye remote sensing Satellites. In Proceedings of the International Calibration and Orientation Workshop, EuroCow, Castelldefels, Spain, 10–12 February 2010; pp. 10–12. [Google Scholar]
- Ong, C.; Caccetta, M.; Lau, I.C.; Ong, L.; Middleton, E. Compositional characterisation of the pinnacles vicarious calibration site. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3059–3062. [Google Scholar]
- Pato, M.; Bachmann, M.; de los Reyes, R.; Alonso, K.; Baur, S.; Gerasch, B.; Holzwarth, S.; Langheinrich, M.; Marshall, D.; Schneider, M.; et al. First year EnMAP radiometric performance based on scenes over RadCalNet and PICS sites. In Proceedings of the Optica Sensing Congress 2023 (AIS, FTS, HISE, Sensors, ES), Munich, Germany, 30 July 2023; p. HM2C.5. [Google Scholar]
- Angal, A.; Bruegge, C.; Xiong, X.; Wu, A. Intercalibration of the reflective solar bands of MODIS and MISR instruments on the Terra platform. J. Appl. Remote Sens. 2022, 16, 027501. [Google Scholar] [CrossRef]
- Angal, A.; Xiong, X.; Thome, K.; Wenny, B.N. Cross-Calibration of Terra and Aqua MODIS Using RadCalNet. IEEE Geosci. Remote Sens. Lett. 2021, 18, 188–192. [Google Scholar] [CrossRef]
- Gao, C. An Approach for Evaluating Multi-Site Radiometry Calibration of Sentinel-2B/MSI using RadCalNet Sites. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8473–8483. [Google Scholar] [CrossRef]
- Shrestha, M.; Helder, D.; Christopherson, J. DLR Earth Sensing Imaging Spectrometer (DESIS) Level 1 Product Evaluation Using RadCalNet Measurements. Remote Sens. 2021, 13, 2420. [Google Scholar] [CrossRef]
- Wolters, E.; Toté, C.; Sterckx, S.; Adriaensen, S.; Henocq, C.; Bruniquel, J.; Scifoni, S.; Dransfeld, S. iCOR Atmospheric Correction on Sentinel-3/OLCI Over Land: Intercomparison with AERONET, RadCalNet, and SYN Level-2. Remote Sens. 2021, 13, 654. [Google Scholar] [CrossRef]
- Kim, K.; Lee, K. A Validation Experiment of the Reflectance Products of KOMPSAT-3A Based on RadCalNet Data and Its Applicability to Vegetation Indexing. Remote Sens. 2020, 12, 3971. [Google Scholar] [CrossRef]
- Jing, X.; Leigh, L.; Teixeira Pinto, C.; Helder, D. Evaluation of RadCalNet Output Data Using Landsat 7, Landsat 8, Sentinel 2A, and Sentinel 2B Sensors. Remote Sens. 2019, 11, 541. [Google Scholar] [CrossRef]
- Sterckx, S.; Wolters, E. Radiometric Top-of-Atmosphere Reflectance Consistency Assessment for Landsat 8/OLI, Sentinel-2/MSI, PROBA-V, and DEIMOS-1 over Libya-4 and RadCalNet Calibration Sites. Remote Sens. 2019, 11, 2253. [Google Scholar] [CrossRef]
- Banks, A.C.; Hunt, S.E.; Gorroño, J.; Scanlon, T.; Woolliams, E.R.; Fox, N.P. A comparison of validation and vicarious calibration of high and medium resolution satellite-borne sensors using RadCalNet. In Proceedings of the SPIE Remote Sensing, Warsaw, Poland, 29 September 2017; pp. 246–254. [Google Scholar]
- de los Reyes, R.; Alonso, K.; Bachmann, M.; Carmona, E.; Langheinrich, M.; Müller, R.; Pflug, B.; Richter, R. The desis l2a processor and validation of l2a products using aeronet and radcalnet data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 46, 9–12. [Google Scholar] [CrossRef]
- Mims, F.M., III. An inexpensive and stable LED Sun photometer for measuring the water vapor column over South Texas from 1990 to 2001. Geophys. Res. Lett. 2002, 29, 20-1–20-4. [Google Scholar] [CrossRef]
- Brooks, D.R.; Mims III, F.M. Development of an inexpensive handheld LED-based Sun photometer for the GLOBE program. J. Geophys. Res. 2001, 106, 4733–4740. [Google Scholar] [CrossRef]
- Mims, F.M., III. An International Haze-Monitoring Network for Students. Bull. Am. Meteorol. Soc. 1999, 80, 1421–1431. [Google Scholar] [CrossRef]
- Mims, F.M., III. Sun photometer with light-emitting diodes as spectrally selective detectors. Appl. Opt. 1992, 31, 6965–6967. [Google Scholar] [CrossRef]
- Czapla-Myers, J.S.; Thome, K.J.; Biggar, S.F. Design, calibration, and characterization of a field radiometer using light-emitting diodes as detectors. Appl. Opt. 2008, 47, 6753–6762. [Google Scholar] [CrossRef]
- Czapla-Myers, J.S.; Thome, K.J.; Cocilovo, B.R.; McCorkel, J.T.; Buchanan, J.H. Temporal, spectral, and spatial study of the automated vicarious calibration test site at Railroad Valley, Nevada. In Proceedings of the Earth Observing Systems XIII, San Diego, CA, USA, 20 August 2008; Volume 7081, pp. 161–169. [Google Scholar]
- Czapla-Myers, J.S.; Thome, K.J.; Buchanan, J.H. Implication of spatial uniformity on vicarious calibration using automated test sites. In Proceedings of the Earth Observing Systems XII, San Diego, CA, USA, 27 September 2007; Volume 6677, pp. 327–336. [Google Scholar]
- Scott, K.P.; Thome, K.J.; Brownlee, M.R. Evaluation of Railroad Valley Playa for use in vicarious calibration. In Proceedings of the SPIE, Multispectral Imaging for Terrestrial Applications, Denver, CO, USA, 4 November 1996; pp. 158–166. [Google Scholar]
- Brown, S.W.; Johnson, B.C.; Yoon, H.W.; Butler, J.J.; Barnes, R.A.; Biggar, S.F.; Spyak, P.R.; Thome, K.J.; Zalewski, E.F.; Helmlinger, M.; et al. Radiometric characterization of field radiometers in support of the 1997 Lunar Lake, Nevada, experiment to determine surface reflectance and top-of-atmosphere radiance. Remote Sens. Environ. 2001, 77, 367–376. [Google Scholar] [CrossRef]
- Thome, K.; Schiller, S.; Conel, J.; Arai, K.; Tsuchida, S. Results of the 1996 Earth Observing System vicarious calibration joint campaign at Lunar Lake Playa, Nevada (USA). Metrologia 1998, 35, 631–638. [Google Scholar] [CrossRef]
- Biggar, S.F.; Dinguirard, M.; Gellman, D.I.; Henry, P.; Jackson, R.D.; Moran, M.S.; Slater, P.N. Radiometric calibration of SPOT 2 HRV—A comparison of three methods. In Proceedings of the Calibration of Passive Remote Observing Optical and Microwave Instrumentation, Orlando, FL, USA, 1 August 1991; pp. 155–162. [Google Scholar]
- Sinyuk, A.; Holben, B.N.; Eck, T.F.; Giles, D.M.; Slutsker, I.; Korkin, S.; Schafer, J.S.; Smirnov, A.; Sorokin, M.; Lyapustin, A. The AERONET Version 3 aerosol retrieval algorithm, associated uncertainties and comparisons to Version 2. Atmos. Meas. Tech. 2020, 13, 3375–3411. [Google Scholar] [CrossRef]
- Dubovik, O.; Smirnov, A.; Holben, B.N.; King, M.D.; Kaufman, Y.J.; Eck, T.F.; Slutsker, I. Accuracy assessments of aerosol properties retrieved from Aerosol Robotic Network (AERONET) Sun and sky radiance measurments. J. Geophys. Res. 2000, 105, 9791–9806. [Google Scholar] [CrossRef]
- Dubovik, O.; King, M.D. A flexible inversion algorithm for retrieval of aerosol optical properties from Sun and sky radiance measurements. J. Geophys. Res. 2000, 105, 20673–20696. [Google Scholar] [CrossRef]
- Chance, K.; Kurucz, R.L. An improved high-resolution solar reference spectrum for earth’s atmosphere measurements in the ultraviolet, visible, and near infrared. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 1289–1295. [Google Scholar] [CrossRef]
- Thome, K.J.; Arai, K.; Tsuchida, S.; Biggar, S.F. Vicarious Calibration of ASTER via the Reflectance-Based Approach. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3285–3295. [Google Scholar] [CrossRef]
- Leisso, N.P.; Thome, K.J.; Czapla-Myers, J.S. Validation of the onboard radiometric calibration of the GOES I-M visible channel by reflectance-based vicarious methods. In Proceedings of the Atmospheric and Environmental Remote Sensing Data Processing and Utilization III: Readiness for GEOSS, San Diego, CA, USA, 20 September 2007; pp. 668404–668410. [Google Scholar]
- Thome, K.J.; Helder, D.L.; Aaron, D.; Dewald, J.D. Landsat-5 TM and Landsat-7 ETM+ absolute radiometric calibration using the reflectance-based method. Geosci. Remote Sens. IEEE Trans. 2004, 42, 2777–2785. [Google Scholar] [CrossRef]
- Anderson, N.J.; Biggar, S.F.; Burkhart, C.; Thome, K.J.; Mavko, M.E. Bi-directional Calibration Results for the Cleaning of Spectralon Reference Panels. In Proceedings of the Earth Observing Systems VII, Seattle, WA, USA, 24 September 2002; pp. 201–210. [Google Scholar]
- Biggar, S.F.; Labed, J.F.; Santer, R.P.; Slater, P.N.; Jackson, R.D.; Moran, M.S. Laboratory calibration of field reflectance panels. In Proceedings of the Recent Advances in Sensors, Radiometry, and Data Processing for Remote Sensing, Orlando, FL, USA, 12 October 1988; pp. 232–240. [Google Scholar]
- Jackson, R.D.; Susan Moran, M.; Slater, P.N.; Biggar, S.F. Field calibration of reference reflectance panels. Remote Sens. Environ. 1987, 22, 145–158. [Google Scholar] [CrossRef]
- Kempen, T.; Rotmans, T.; Hees, R.; Bruegge, C.; Fu, D.; Hoogeveen, R.W.M.; Pongetti, T.; Rosenberg, R.; Aben, I. Vicarious Calibration of the TROPOMI-SWIR module over the Railroad Valley playa. EGUsphere 2023, 1–32. [Google Scholar] [CrossRef]
- Bruegge, C.J.; Coburn, C.; Elmes, A.; Helmlinger, M.C.; Kataoka, F.; Kuester, M.; Kuze, A.; Ochoa, T.; Schaaf, C.; Shiomi, K.; et al. Bi-Directional Reflectance Factor Determination of the Railroad Valley Playa. Remote Sens. 2019, 11, 2601. [Google Scholar] [CrossRef]
- Slater, P.N.; Biggar, S.F.; Palmer, J.M.; Thome, K.J. Unified approach to absolute radiometric calibration in the solar-reflective range. Remote Sens. Environ. 2001, 77, 293–303. [Google Scholar] [CrossRef]
- Thome, K.; Smith, N.; Scott, K. Vicarious calibration of MODIS using Railroad Valley Playa. In IGARSS 2001. Scanning the Present and Resolving the Future. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9-13 July 2001; pp. 1209–1211. [Google Scholar]
- Thome, K.J.; Crowther, B.G.; Biggar, S.F. Reflectance- and Irradiance-based Calibration of Landsat 5 Thematic Mapper. Can. J. Remote Sens. 1997, 23, 309–317. [Google Scholar] [CrossRef]
- Thome, K.J.; Gellman, D.I.; Parada, R.J.; Biggar, S.F.; Slater, P.N.; Moran, M.S. In-flight radiometric calibration of Landsat-5 Thematic Mapper from 1984 to present. In Proceedings of the Recent Advances in Sensors, Radiometric Calibration, and Processing of Remotely Sensed Data, Orlando, FL, USA, 15 November 1993; pp. 126–130. [Google Scholar]
- Thome, K.; D’Amico, J.; Hugon, C. Intercomparison of Terra ASTER, MISR, and MODIS, and Landsat-7 ETM+. In Proceedings of the IEEE International Conference on Geoscience and Remote Sensing Symposium, IGARSS 2006, Denver, CO, USA, 31 July–4 August 2006; pp. 1772–1775. [Google Scholar]
- Biggar, S.F.; Slater, P.N.; Gellman, D.I. Uncertainties in the in-flight calibration of sensors with reference to measured ground sites in the 0.4–1.1 μm range. Remote Sens. Environ. 1994, 48, 245–252. [Google Scholar] [CrossRef]
- Biggar, S.F.; Gellman, D.I.; Slater, P.N. Improved Evaluation of Optical Depth Components from Langley Plot Data. Remote Sens. Environ. 1990, 32, 91–101. [Google Scholar] [CrossRef]
- Gellman, D.I.; Biggar, S.F.; Slater, P.N.; Bruegge, C.J. Calibrated intercepts for solar radiometers used in remote sensor calibration. In Proceedings of the Calibration of Passive Remote Observing Optical and Microwave Instrumentation, Orlando, FL, USA, 1 August 1991; pp. 175–180. [Google Scholar]
- Thome, K.J.; Herman, B.M.; Reagan, J.A. Determination of Precipitable Water from Solar Transmission. J. Appl. Meteorol. 1992, 31, 157–165. [Google Scholar] [CrossRef]
- Helder, D.; Thome, K.; Aaron, D.; Leigh, L.; Czapla-Myers, J.; Leisso, N.; Biggar, S.; Anderson, N. Recent surface reflectance measurement campaigns with emphasis on best practices, SI traceability and uncertainty estimation. Metrologia 2012, 49, S21. [Google Scholar] [CrossRef]
- Thome, K.; Wenny, B.; Czapla-Myers, J.; Anderson, N.; Salehi, F. Solar radiation based calibration results from an ultra-portable field transfer radiometer used in vicarious calibrations. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CO, USA, 4 August 2021. [Google Scholar]
- Thome, K.; Wenny, B.; Anderson, N.; McCorkel, J.; Czapla-Myers, J.; Biggar, S. Ultra-portable field transfer radiometer for vicarious calibration of earth imaging sensors. Metrologia 2018, 55, S104. [Google Scholar] [CrossRef]
- Thome, K.; Czapla-Myers, J.; Wenny, B.; Anderson, N. Calibration and use of an ultra-portable field transfer radiometer for automated vicarious calibration. In Proceedings of the Earth Observing Systems XXII, San Diego, CO, USA, 5 September 2017; pp. 181–191. [Google Scholar]
- Anderson, N.; Thome, K.; Czapla-Myers, J.; Biggar, S. Design of an ultra-portable field transfer radiometer supporting automated vicarious calibration. In Proceedings of the Earth Observing Systems XX, San Diego, CA, USA, 10–13 August 2015; Volume 9607, pp. 40–48. [Google Scholar]
- Micijevic, E.; Haque, M.O.; Mishra, N. Radiometric calibration updates to the Landsat collection. In Proceedings of the Earth Observing Systems XXI, San Diego, CO, USA, 19 September 2016. [Google Scholar]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; Woolliams, E. Uncertainty Analysis Statement—RVUS. 2022. Available online: www.radcalnet.org (accessed on 1 January 2024).
- Wenny, B.N.; Thome, K. Look-up table approach for uncertainty determination for operational vicarious calibration of Earth imaging sensors. Appl. Opt. 2022, 61, 1357–1368. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Landsat 9 OLI | |||
|---|---|---|---|
| Band | Center Wavelength (nm) | Bandwidth (FWHM, nm) | GSD (m) |
| 1 | 443 | 16 | 30 |
| 2 | 483 | 60 | 30 |
| 3 | 561 | 57 | 30 |
| 4 | 655 | 37 | 30 |
| 5 | 865 | 29 | 30 |
| 6 | 1609 | 86 | 30 |
| 7 | 2201 | 189 | 30 |
| 8 (pan) | 592 | 172 | 15 |
| RadCaTS (Railroad Valley, NV, USA) | |
|---|---|
| Group | UArizona |
| Number of Collects | 12 |
| Collection Area (m) | 1000 × 1000 |
| Time (UTC) | 18:21 |
| VZA (degrees) | 0.5 |
| VAA (degrees) | 103.0 |
| Ground Site | Brookings, SD, USA | Ivanpah, CA, USA |
|---|---|---|
| Group | SDSU | UArizona & GSFC |
| Number of Collects | 3 | 1 each |
| Collection Area(s) (m) | 150 × 250 120 × 180 120 × 180 | 120 × 300 |
| Time (UTC) | 17:11 | 18:20 |
| VZA (degrees) | 0.6 | 3.8 |
| VAA (degrees) | 104.2 | 283.5 |
| Ratio of TOA Quantities to Ground Measurements—All Field Data | ||
|---|---|---|
| OLI Band (Center Wavelength) | TOA Spectral Radiance (OLI/ground) | TOA Reflectance (OLI/ground) |
| 1. (443 nm) | 1.031 ± 0.051 | 0.989 ± 0.046 |
| 2. (483 nm) | 1.014 ± 0.046 | 0.994 ± 0.041 |
| 3. (561 nm) | 1.003 ± 0.043 | 0.999 ± 0.040 |
| 4. (655 nm) | 1.018 ± 0.046 | 1.020 ± 0.045 |
| 5. (865 nm) | 1.024 ± 0.045 | 1.014 ± 0.043 |
| 6. (1609 nm) | 1.008 ± 0.043 | 1.021 ± 0.045 |
| 7. (2201 nm) | 0.979 ± 0.040 | 1.002 ± 0.040 |
| 8. (pan, 592 nm) | 1.011 ± 0.043 | 0.995 ± 0.041 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Czapla-Myers, J.S.; Thome, K.J.; Anderson, N.J.; Leigh, L.M.; Pinto, C.T.; Wenny, B.N. The Ground-Based Absolute Radiometric Calibration of the Landsat 9 Operational Land Imager. Remote Sens. 2024, 16, 1101. https://doi.org/10.3390/rs16061101
Czapla-Myers JS, Thome KJ, Anderson NJ, Leigh LM, Pinto CT, Wenny BN. The Ground-Based Absolute Radiometric Calibration of the Landsat 9 Operational Land Imager. Remote Sensing. 2024; 16(6):1101. https://doi.org/10.3390/rs16061101
Chicago/Turabian StyleCzapla-Myers, Jeffrey S., Kurtis J. Thome, Nikolaus J. Anderson, Larry M. Leigh, Cibele Teixeira Pinto, and Brian N. Wenny. 2024. "The Ground-Based Absolute Radiometric Calibration of the Landsat 9 Operational Land Imager" Remote Sensing 16, no. 6: 1101. https://doi.org/10.3390/rs16061101