1. Introduction
Artificial night lights radiated from the Earth’s surface upward into the Universe are scattered back toward the surface by the atmosphere (molecules and aerosols) [
1]. This backscattered light overwhelms the faint light of many celestial objects (planets, stars, galaxies, nebulaes) with small radiance. This phenomenon, called astronomical light pollution, makes it very difficult to make all ground-based astronomical observations. Under ecological light pollution, all adverse effects of artificial nocturnal lights on animals and humans are meant [
2,
3]. A special form of ecological light pollution is polarized light pollution (PLP): in a wider sense, PLP means the harmful effects of artificial polarized day or night lights on polarization-sensitive animals. In a narrower sense, the experimentally well-corroborated and thoroughly studied PLP involves only the adverse influences of strongly (i.e., with high degrees of linear polarization
d) and nearly horizontally (i.e., with angles of polarization α ≈ 90° relative to the vertical) polarized light reflected from smooth and dark man-made surfaces on polarotactic water-loving insects [
4]. Since all published case studies belong to this narrow-sense type, in this work, we deal only with it, which is called specific PLP further on in this work.
d is the portion of the total light intensity
I with an electric field vector oscillating in a dominating plane, the orientation of which is called the angle α of polarization. The partially linearly polarized light of a given wavelength (colour) is characterized by variables
I,
d and α.
As aquatic insects detect water bodies predominantly by perceiving the horizontally polarized light reflected from water surfaces [
5], they are attracted to such light. Horizontally polarizing artificial surfaces deceive these insects that land and often lay their eggs on them [
6]. Since the oviposited eggs irremediably perish due to dehydration [
7], this phenomenon can endanger the local insect population concerned. Therefore, in the last few decades, researchers have thoroughly mapped the sources of PLP in order to understand the hazards with which aquatic insects are confronted in their optical environment [
8,
9,
10,
11].
In practice, all shiny (i.e., smooth) and dark (especially horizontal black) artificial surfaces can be sources of specific PLP, the two prerequisites of which are that the degree of polarization
d is larger than the threshold
d* of polarization sensitivity of the concerned aquatic insect (i.e.,
d >
d*) and the angle of polarization α (measured from the vertical) of reflected light is approximately horizontal, that is, it deviates from the horizontal less than the threshold angle α* (i.e., |90° − α| < α*) [
4]. Since the reflected light is always perpendicularly polarized to the plane of reflection (determined by the incident and reflected light rays), the second prerequisite is that the reflection plane is nearly vertical. Typical PLP sources are asphalt roads [
7], dark car bodies [
12], dark glass surfaces [
13], black plastic sheets used in agriculture [
14], crude oil spills [
15], black gravestones [
16], etc.
The PLP associated with photovoltaic solar panels is of particular importance, because several studies have indicated that these panels can attract polarotactic aquatic insects to lay their eggs upon them [
9,
11]. Furthermore, the PLP of solar panels can be a possible indirect cause of bat-panel collisions [
17,
18]: the polarotactic insects attracted by the polarization of panel-reflected light can lure insectivorous bats [
13], which consume these deceived insects. Photovoltaic use is expanding dramatically worldwide, and relatively little is known about their reflection-polarization characteristics. Since the tilt angle of certain photovoltaics can change (to maximize photon capture) or be fixed relative to the ground, the polarization properties of light reflected from them are difficult to predict and, thus, largely unknown.
The polarization of earthlight (i.e., light scattered and reflected upward from the Earth’s surface) can be measured via imaging polarimetry [
19]. In remote sensing, various imaging polarimeters are used to obtain the reflection-polarization patterns of the Earth’s surface. Considering the height of such measurements, there are two main cathegories of polarimetry: near-pol-sensing happens from 1 to 1.5 m above the ground surface [
20,
21,
22,
23], while remote-pol-sensing is performed at large/huge heights from balloons (~3–5 km) [
24,
25,
26], or satellites (~700–800 km) (POLDER = Polarization and Directionality of the Earth’s Reflectances: Deschamps et al. [
27], while PARASOL = Polarization and Anisotropy of Reflectances for Atmospheric Sciences with Observations from a Lidar) [
28]. Polarimetric studies from intermediate (10–100 m) heights were previously lacking. Nowadays, this intermediate pol-sensing can be optimally conducted from drones. Recently, Száz et al. [
10] investigated the reflection-polarization characteristics of dark lake patches with drone-based imaging polarimetry.
In the past, the PLP sources have been quantified by near-pol-sensing from ground-borne imaging polarimeters (reviewed by [
8]). Their advantage is their large spatial resolution, while their disadvantage is that they can only capture a small ground area. Although satellite-borne imaging polarimeters can efficiently scan a large area of the Earth’s surface [
28,
29], their spatial resolutions are not high enough to record the fine details of the reflection-polarization patterns of PLP sources. An intermediate solution is using drone-borne imaging polarimetry, which can scan a relatively large (medium) ground area with relatively high (moderate) resolution.
To fill in the gap between near- and remote-pol-sensing, that is, between ground- and satellite-borne imaging polarimetry, Száz et al. [
10] developed a drone-based imaging polarimeter consisting of a drone equipped with a linear polarization camera. With this equipment, we measured the reflection-polarization characteristics of fixed-tilt photovoltaic solar panels from the viewpoint of flying polarotactic aquatic insects, which are the most endangered targets and potential victims of such panels. According to Száz et al. [
9] and Fritz et al. [
11], these photovoltaic solar farms offer relevant PLP for water-loving polarotactic insects. In this work, we present the reflection-polarization patterns and the temporal change in the polarized light pollution of solar panels measured from two orthogonal viewing directions between sunrise and sunset on a sunny and an overcast day, and we discuss their visual-ecological importance.
2. Materials and Methods
The drone-polarimetric measurements for a fixed-tilt photovoltaic solar panel farm (47°41’56”N, 19°9’49”E) between the villages Göd and Sződliget (Northern Hungary) were performed on a sunny day and an overcast day: on 30 June 2022, the sky was sunny all day, while on 24 August 2022, the sky was overcast, sometimes with fewer clouds. The tilt angle of the panels (Trina Solar monocrystalline, 450 W) from the horizontal was 33°, which is the energetically optimal value in Hungary. The measurements were conducted from sunrise to sunset in two-hourly sessions.
Using a light (weight
w = 65 g) and small (volume
v = 3 cm × 3 cm × 6 cm) linear polarization camera (Color GigE DYK 33GX250 Polarsens
®, vendor: Basler, Ahrensburg, Germany; polarization-sensitive CMOS sensor: Sony’s Pregius S
TM IMX250MYR) installed on a drone (DJI Matrice 210 v2 RTK), a polarization image was captured every two seconds. The objective lens (type: Basler Lens C125-0418-5M-P-f4mm, vendor: Basler) of the camera has the diameter
D = 29 mm, focal length
f = 4 mm, and field of view δ = 86°. The sensitivity ranges of the RGB filters of this camera are as follows: red (650 ± 50 nm), green (550 ± 50 nm), and blue (450 ± 50 nm). The techniques dealing with aliasing due to the 4 × 4 superpixels in the channeled spatiotemporal polarization sensor systems (e.g., polarization-sensitive CMOS sensors) are described in the literature [
30]. The studied solar panels did not have a bluish hue (characteristic for the silicon), possessed a protecting glass covering, and did not have an anti-reflective coating. Due to these features, they were shiny black to the human eye, and their reflection-polarization characteristics were practically independent of wavelength in the visible range of the spectrum in which the used CMOS sensor is sensitive. Thus, in this work, we present only the polarization characteristics measured in the green part of the spectrum. They were very similar in the red and blue spectral ranges.
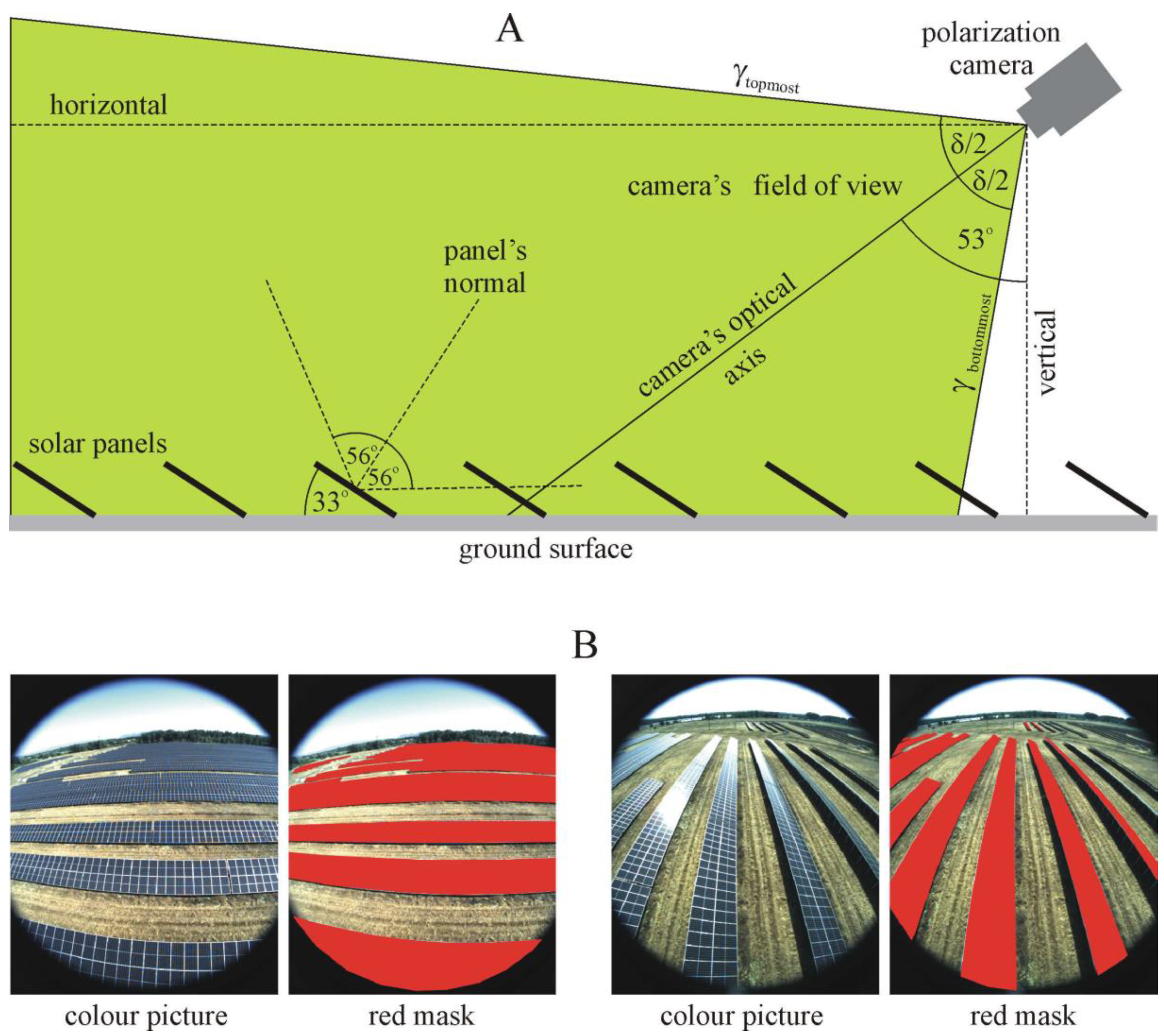
The camera was mounted on the bottom of the drone, and its optical axis pointed toward Brewster’s angle θ
Brewster = arctan (
n = 1.33) = 53°, measured from the vertical, where
n = 1.33 is the refractive index of water (
Figure 1A). An angle of 53° was chosen, since water-seeking polarotactic aquatic insects predominantly detect water by means of the highly and horizontally polarized light mainly coming from this direction [
6,
31,
32,
33].
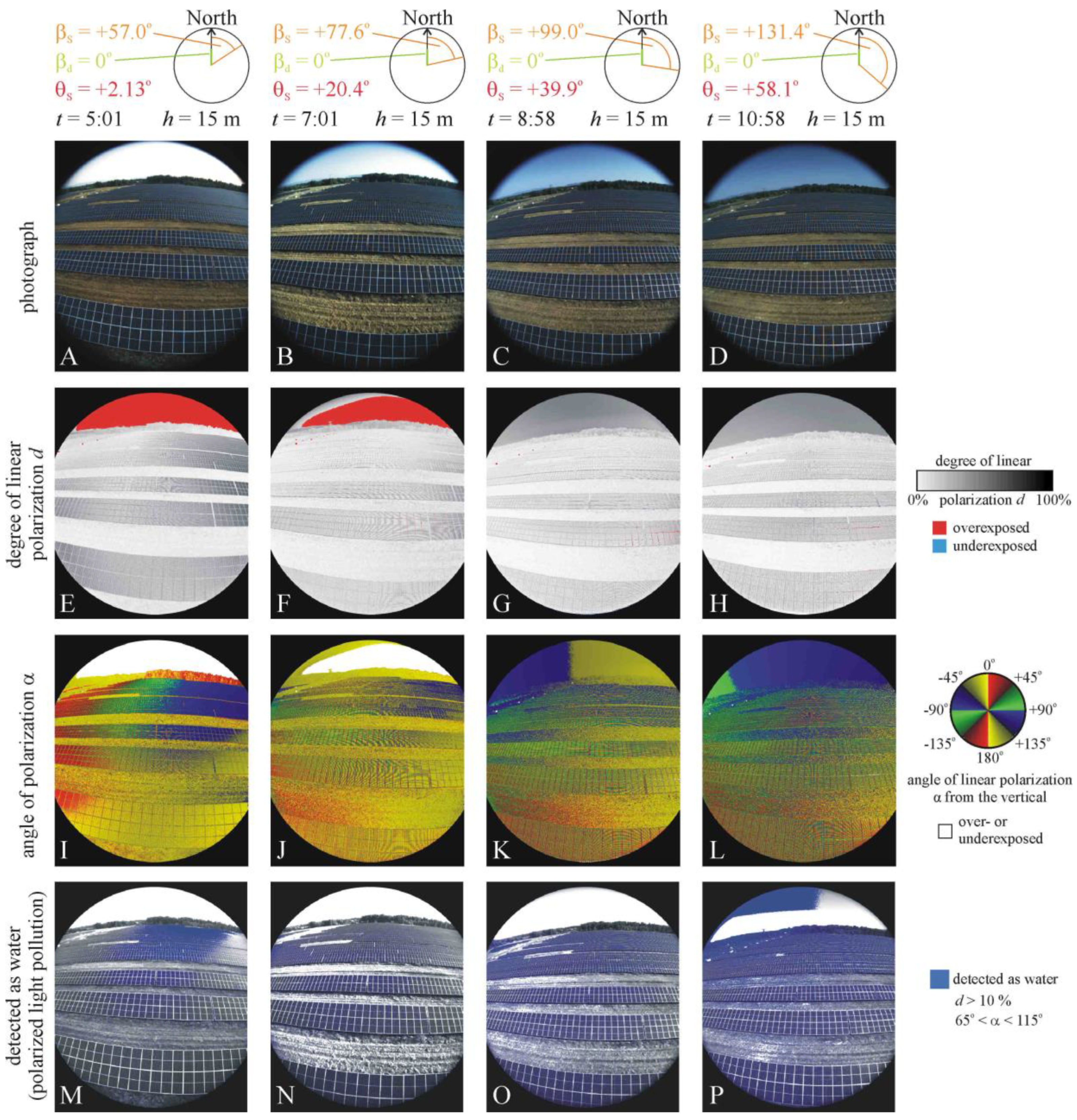
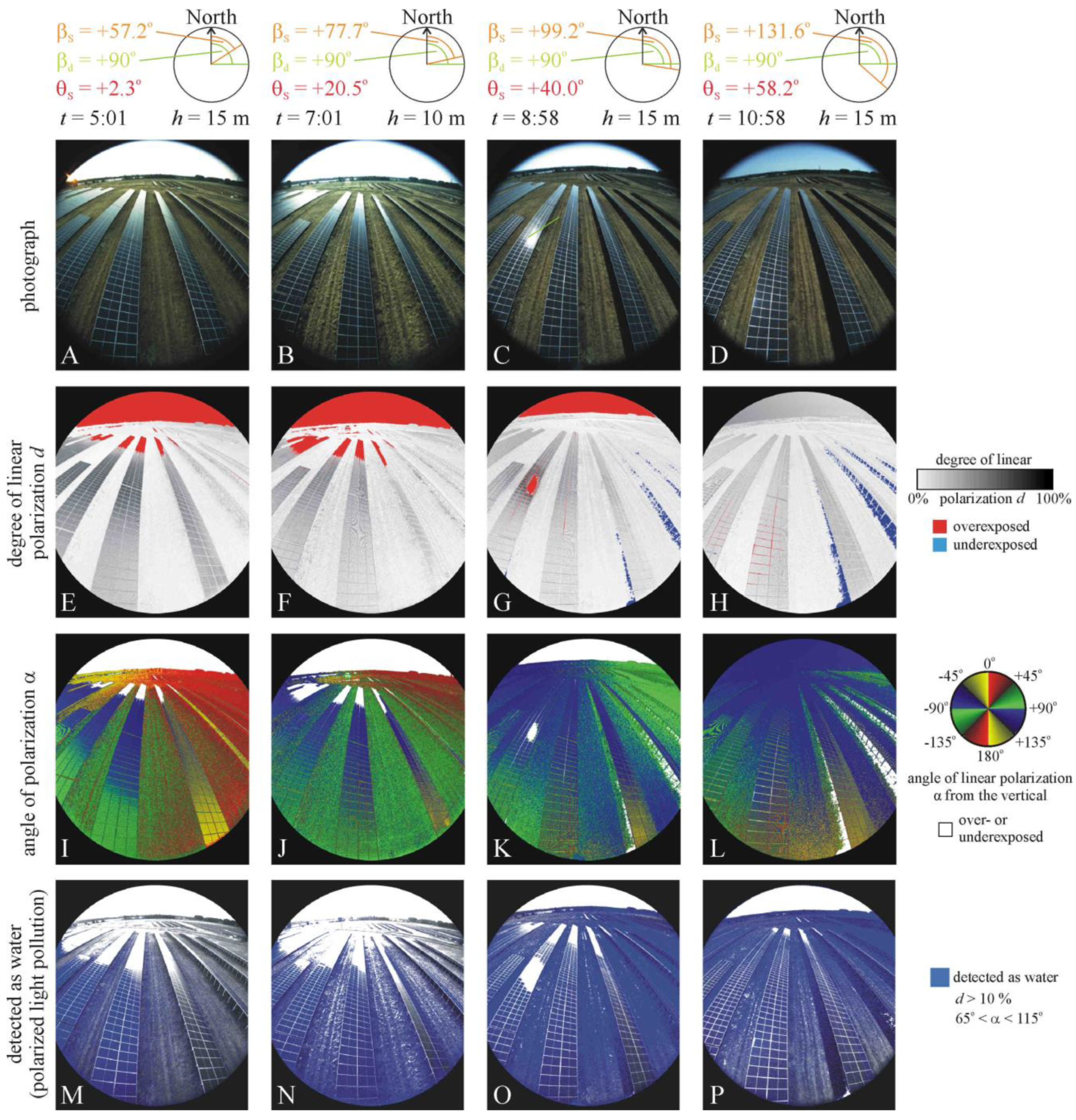
In our two measurement campaigns, we measured the reflection-polarization patterns of the fixed-tilt photovoltaic solar panels in two azimuth directions: perpendicular (
Figure 2,
Supplementary Figures S1, S3 and S4) and parallel (
Figure 3,
Supplementary Figures S2, S5 and S6) to the rows of panels. These two viewing directions were enough to register the typical reflection-polarization characteristics of fixed-tilt solar panels. In this work, the sun-to-drone angle of the optical axis of the polarization camera measured from the solar meridian was marked by β
d, while the azimuth angle of the Sun from the geographical North and the elevation angle of the Sun above the horizon were marked by β
S and θ
S, respectively. Furthermore,
d is the degree (%) of linear polarization, and α is the angle of polarization measured clockwise from the vertical. The definition of both polarization variables is available in [
19], for example.
The polarization images taken by the drone-based linear polarization camera were evaluated using our custom-written software (Python programming language using the OpenCV algorithm package). According to our test of the polarization camera and the evaluation of its polarization images, the net uncertainties Δ
d and Δα of the measured degree of linear polarization
d and angle of polarization α of light transmitted through a linearly polarizing sheet (P-ZN/R-12628, Schneider, Bad-Kreuznach, Germany) with different transmission directions (0°, 45°, 90°, 135° from the vertical) were Δ
d ≈ ±1% and Δα ≈ ±1° for
d = 100% and Δ
d ≈ ±3% and Δα ≈ ±3° for
d = 15% (the threshold of the polarization sensitivity of aquatic insects [
33]). The possible error sources can be the photon-detection noise, induced polarization/cross-talk from the lens, differential pixel gains, aliasing, etc. We did not determine the individual contributions of these error sources to the net absolute error. The evaluation process for polarization images and further details of our drone-polarimetry were described by Száz et al. [
10].
In this work,
plp =
Nwater/
Npanel is the quantitative measure of the polarized light pollution of solar panels, where
Nwater is the number of panel pixels detected as water by a polarotactic insect, and
Npanel is the number of the whole panel area, the numbers of which were determined as follows: (1) We constructed a red mask (
Figure 1B) containing all solar panels visible on the picture taken by the polarization camera from the drone. (2) From this red mask, the over- or underexposed pixels were removed, and our software counted the number
Npanel of the remaining red pixels of the mask. (3) In the picture, we determined those pixels for which the conditions
d >
d* and |90° − α| < α* were satisfied, which represented the pixels that would be sensed as water by a hypothetical polarotactic aquatic insect possessing polarization sensitiviy thresholds
d* and α*. These pixels are marked by blue colour in the last rows of
Figure 2 and
Figure 3 (and
Supplementary Figures S1–S6). (4) The number
Nwater of blue pixels (without any over- or underexposed pixels) of the areas detected as water was also counted. (5) Finally, the quotient
plp =
Nwater/
Npanel was calculated.
4. Discussion
This work has the following three novelties: (i) Our drone-polarimetric method is new. Its first application was by Száz et al. [
10], who measured the reflection-polarization characteristics of dark lake patches and explained their ecological implications. The present paper deals with the results of the second application of drone-polarimetry. (ii) The reflection-polarization patterns of a fixed-tilt photovoltaic solar farm and the quantity
plp (%) of the polarized light pollution of solar panels derived from these patterns are measured for the first time by us using drone-based imaging polarimetry. (iii) The measured reflection-polarization characteristics of the studied photovoltaic farm are discussed from the point of view of flying polarotactic aquatic insects, which are the most endangered victims of polarized light pollution.
The ecological monitoring of changes in the concerned aquatic insect populations can start only after the monitoring of the polarized light pollution of photovoltaic solar farms. In this work, we present the results of the polarimetric monitoring of a Hungarian solar farm performed by drone-polarimetry. Here, we call the attention of ecologists to the importance of the future monitoring of the influence of solar farms on the local aquatic insect fauna.
The polarized light pollution (PLP) of smooth (shiny) and dark (especially black) artificial surfaces can be reduced or eliminated in the following ways [
4,
8]: (i) Making the surface rough (matt) results in it reflecting light diffusely with all possible angles of polarization α, the consequence of which is the considerable decrease in the net degree of linear polarization
d of reflected light. The rougher (matter) the surface, the lower the
d. Photovoltaic solar panels and other black reflectors with rough cover surface can have quite small PLP, but the reduction in PLP depends on both the surface mattness and the species of polarotactic aquatic insects concerned [
9,
11]. (ii) According to Umow’s law [
34], darker surfaces reflect light with lower degrees of linear polarization
d. Thus, upon making a polarized-light-polluting surface bright (especially white), its reflected
d significantly drops, and, thus, its PLP drastically decreases [
4]. (iii) If a shiny black surface is covered by a grid of thin white orthogonal or parallel lines, its PLP is reduced. The denser these white lines, the lower the PLP [
8].
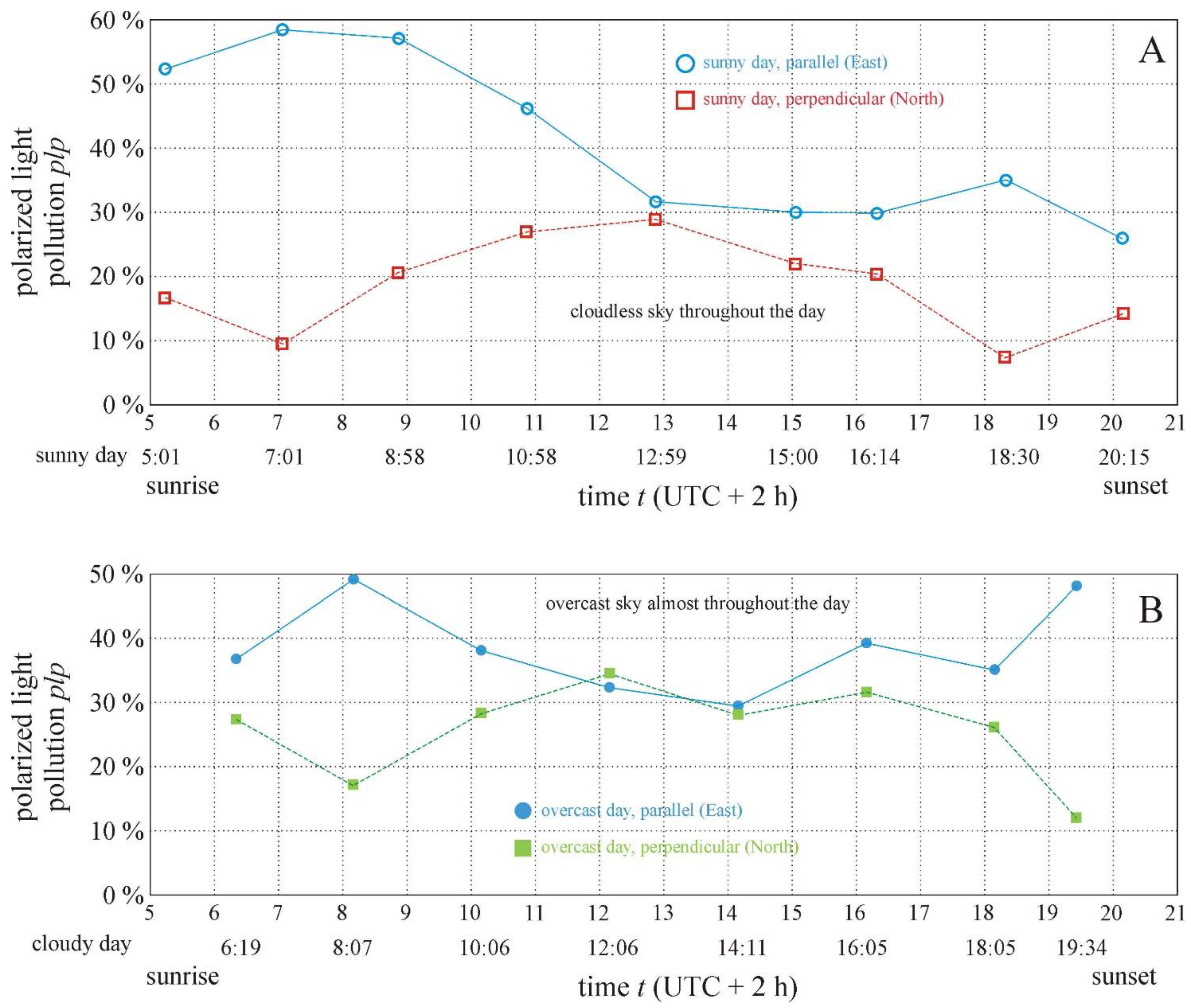
As seen by a water-seeking flying polarotactic aquatic insect, larger or smaller parts of an extended farm of tilted solar panels can be more or less polarized-light-polluting practically at any time in any viewing direction for any solar elevation depending on the angle of reflection φ (
Figure 2,
Figure 3 and
Figure 4,
Supplementary Figures S1–S6, Supplementary Tables S1 and S2). The nearer the φ is to Brewster’s angle θ
Brewster ≈ 53° relative to the normal vector of the solar panel, the larger the measure
plp of polarized light pollution of the panel. Depending on the viewing direction (parallel or perpendicular to the solar panel rows), the
plp is the highest at low (after sunrise and before sunset) or high solar elevations on both cloudless and cloudy days (
Figure 4 and
Supplementary Tables S1 and S2). This is a visually and ecologically important finding, because flying dispersing polarotactic aquatic insects predominantly seek water bodies at low and/or high solar elevations, that is, near morning, noon and/or evening, when polarotactic water detection is the most efficient [
33]. Near noon, the
plp of tilted solar panels is moderate (
Figure 4 and
Supplementary Tables S1 and S2); thus, aquatic insects flying mainly at high solar elevations (around noon) are less endangered by polarized light pollution than insects flying exclusively or mainly at low solar elevations (near sunrise and/or sunset) when the
plp of tilted solar panels is much larger.
The solar panels investigated by us are black and smooth, thus possessing high PLP, which is, however, decreased, because they have a white orthogonal grid pattern due to construction/technical constraints. This PLP-decreasing grid effect is not taken into consideration in the calculation of the
plp-value, as described in the
Section 2.
In our study, we focused only on the tilted photovoltaic solar panels, while we ignored the sky and the grassy ground also seen in the pictures and polarization patterns taken by the drone-based polarization camera. Although in
Figure 2P (and
Supplementary Figures S1P, S2P–R and S3P), certain regions of the sky were recognized as water by our software, these celestial regions are, of course, irrelevant for water-seeking polarotactic insects, which detect the horizontally polarized signal reflected from water surfaces with the polarization-sensitive ventral regions of their compound eyes [
5,
6,
31,
32,
33]. Similarly, our software recognized certain areas of the dry grassy ground in the last row of
Figure 2 and
Figure 3 (and
Supplementary Figures S1–S6) as water (depicted by blue). The simple reason for both (sky and ground) misrecognitions is that our software considers all areas as water if the conditions
d > 10% and 65° < α < 115° are satisfied. However, the grassy ground areas misrecognized as water do not attract polarotactic aquatic insects at all, because the scatter of the averagely horizontal polarization is large due to the ground/grass roughness, and large scatters of the angle of polarization repel these insects [
8]. On the other hand, since these water-imitating spotty (composed of random dots) ground regions usually do not compose continuously connected horizontally polarizing larger areas, they do not attract water-seeking insects, which ignore too small spots/patches, even if they reflect horizontally polarized light [
8]. The ecological reason for this ignorance is that a tiny water body with a surface area smaller than the insect-species-dependent threshold value is inappropriate for the development of larvae laid into the water. Too small water areas can drain out and/or warm up quickly, contain too little food and/or oxygen, contain too many predators, etc. Hence, a regular grass field or rough ground surface never attracts polarotactic water insects.
The interference between the intrinsic pixel grid of the polarization-sensitive CMOS sensor of our polarization camera and the grid structure of the surface of the studied solar panels resulted in the typical Moire’s pattern in certain parts of the polarization patterns in
Figure 2 and
Figure 3 (and
Supplementary Figures S1–S6). Unfortunately, presently, this Moire’s artefact can be neither technically, nor computationally eliminated.
A similar disadvantage is that certain overly bright areas of the solar panels mirroring overly intense sky/sunlight are unavoidably overexposed. Since the polarizing characteristics of these overexposed areas are unknown, we ignored them during our computations. Certain overly dark areas of the scene in shadow were underexposed. Since these shadowed areas were always on the ground rather than on the solar panels, they did not cause problems in our investigations.
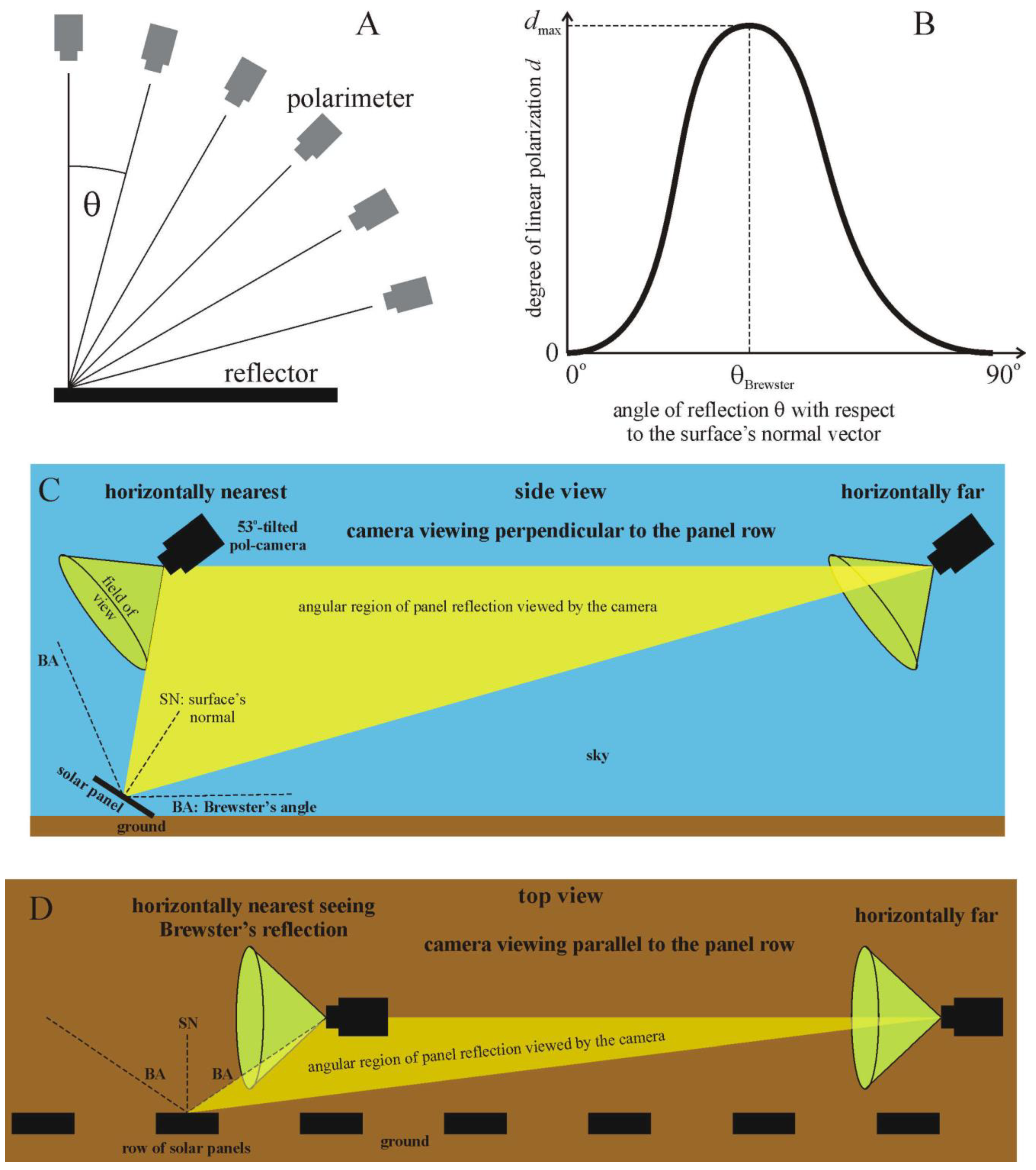
Figure 5A demonstrates how the degree
d and angle α of the polarization of a horizontal solar panel can be measured using a polarimeter as a function of the angle θ of reflection from the surface’s normal vector, i.e., the vertical. After such a measurement, we can obtain the curve
d(θ) that is shown qualitatively in
Figure 5B:
d is zero at θ = 0° and 90° and maximal at Brewster’s angle θ
Breswster = arctan (
n), where
n is the refractive index of the panel’s cover layer, which is typically
nsolar panel ≈ 1.5 (for green light); thus,
. In the case of the water surface with
nwater surface ≈ 1.33 (for green light), Brewster’s angle is
.
In the studied photovoltaic solar farm, there were several thousand southward-facing fixed-tilt solar panels with a 33° tilt angle. The aim of our drone-polarimetry was not to simply measure the reflection-polarization characteristics (i.e.,
d and α) of an individual solar panel, because this could have been conducted much more simply with a horizontal panel (
Figure 5A), the polarization features of which are well known (
Figure 5B). Instead of this, our goal was to demonstrate the merit of drone-polarimetry, which is able to gather a huge amount of polarization information from a large area of the Earth’s surface falling within the wide field of view of the drone-based polarization camera. For this demonstration, we selected the mentioned photovoltaic farm as the target object and determined the net
plp-values of polarized light pollution of all panels within the camera’s field of view to be ecologically important quantities derived from the measured
d- and α-patterns.
In principle, by changing the azimuth angle of the drone levitating at a constant height above the solar farm and varying the elevation angle of the camera’s optical axis (with the drone’s gimbal), we could have performed drone-polarimetric measurement for numerous directions of view. However, this would have been very time-consuming and result in too large an amount of polarization data, which would be very difficult to evaluate and publish. Thus, we decided to reduce the number of azimuth directions to only two orthogonal directions: perpendicular and parallel to the row of solar panels. Furthermore, we chose only a single elevation angle of the camera’s optical axis, namely 53° from the vertical, practically coinciding with , because polarotactic aquatic insects (main victims of specific PLP) detect water bodies predominantly through perception of the horizontally and maximally polarized light reflected from the water surface from .
Of course, we appreciate that due to the 33° panel tilt, the degree of polarization
d of panel-reflected light was not maximal at about 53° from the vertical, as explained in
Figure 5C, which displays the side view of the geometry of our drone-polarimetry when the polarization camera (tilted 53° from the vertical) viewed perpendicular to a row of photovoltaic solar panels. Due to the panel tilt, the reflection angle from a panel in the vertical plane containing the drone was relatively far from
measured from the panel’s normal, as demonstrated in
Figure 5C by the yellow angular region of panel reflection viewed by the polarization camera. Only a horizontally quite far drone-polarimeter (as shown by the right polarimeter in
Figure 5C) could receive the maximal
d of light reflected from the panel at
. The polarimeters that were horizontally near to the panel could not perceive the Brewster-reflected light in their field of view, as demonstrated by the left polarimeter shown in
Figure 5C.
Figure 5D shows the top view of the geometry of our drone-polarimetry when the polarization camera (tilted 53° from the vertical) viewed parallel to a row of solar panels. If the camera was horizontally far from the panel, the polarimeter could sense only panel reflections far from Brewster’s angle (right polarimeter in
Figure 5D). Only polarimeters horizontally near to the panel could receive the Brewster-reflected light from the panel. Finally, according to
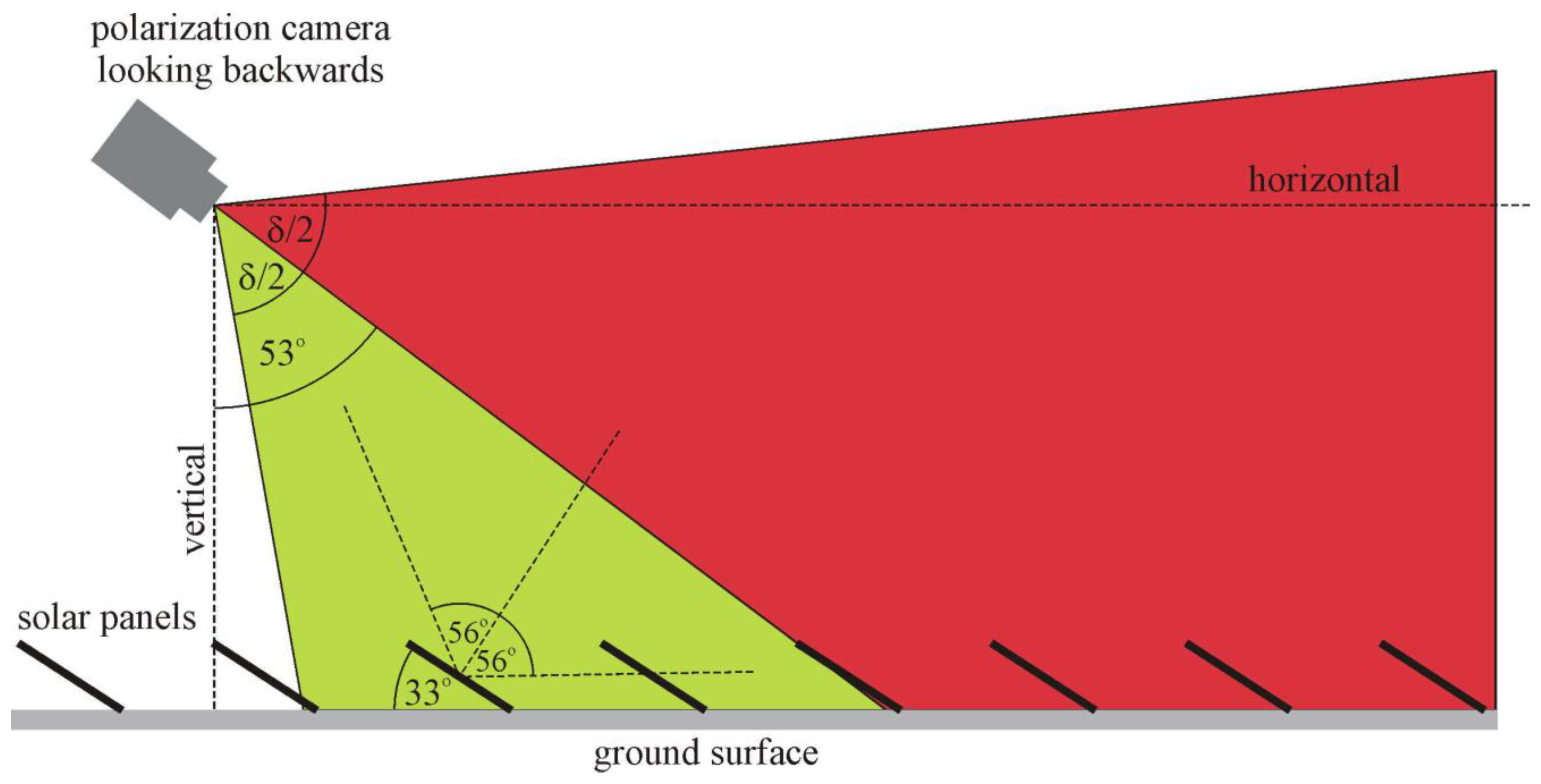
Figure 6, a polarization camera with a fixed-tilt angle θ
Brewster = 53° (from the vertical) looking backwards would be very disadvantageous, because in this case, the photovoltaic reflecting surface of the farther fixed-tilt solar panels could not be seen.
The consequence of the above was that our fixed-elevation drone-polarimeter saw only a few solar panels with Brewster’s reflection, which means that panel reflections were frequently above or below Brewster’s angle from the panel’s normal. Therefore, this approach underestimated the maximum degree of polarization that a polarotactic insect flying in the airspace above a solar farm can experience. This limitation could have been eliminated if the downward tilt of our polarization camera had been varied and the solar field had been resurveyed over and over the solar farm again with multiple passes, each at a different camera tilt. However, since this time-consuming task would have been very difficult to perform, we gave up on this complex approach.
Our drone-polarimetric technique was recently successfully used for the remote sensing of the reflection-polarization characteristics of dark lake patches and their ecological consequences [
10]. Finally, we emphasize that our drone-polarimetric method is a valuable new tool that can be used for many different air-borne measurements beyond the quantification of polarized light pollution (PLP) in a biological context.
Although our study focused on the PLP of solar panels from the point of view of the concerned polarotactic aquatic insects, let us briefly consider its value to the solar farm owners. Wind-blown dust and other solid mineral particles originating from rain drops after their evaporation can aggregate on the panel surface. Beyond these contaminations, the eggs laid by aquatic insects deceived by and attracted to these panels, as well as the carcasses of these insects that died because of dehydration on the hot panels, reduce the panel’s light-absorbing efficiency. Therefore, the panel surfaces should be periodically cleaned, which is a time- and money-consuming task. Nowadays, drones are frequently used to monitor the cleanliness of photovoltaics. The use of drone-polarimetry can also be beneficial to assess the amount of contamination deposited on these panels. To reduce the high reflectivity of smooth and shiny photovoltaics, their surface is made matt (i.e., rough) by different anti-reflective coatings [
9,
11,
35,
36], enhancing the light-absorbing efficiency. In field experiments, it was shown that depending on the insect species, matt/rough solar panels can have much smaller PLP than shiny/smooth ones for polarotactic aquatic insects [
9,
11].
The PLP of photovoltaic panels is indirectly demonstrated by the more and more frequent observations of the number of panel collisions and the activity of insectivorous bats [
13,
17,
18,
37] at solar farms. The main reason for this is the enhanced number of insects deceived and lured by the horizontally polarized light reflected from solar panels.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





