
Locating and Grading of Lidar-Observed Aircraft Wake Vortex Based on Convolutional Neural Networks


Abstract
:1. Introduction
2. Methodology
2.1. Experiments and Data
2.2. Wake Vortex Retrieval Algorithms
2.2.1. Data Pre-Processing
2.2.2. Wake Vortex Locating
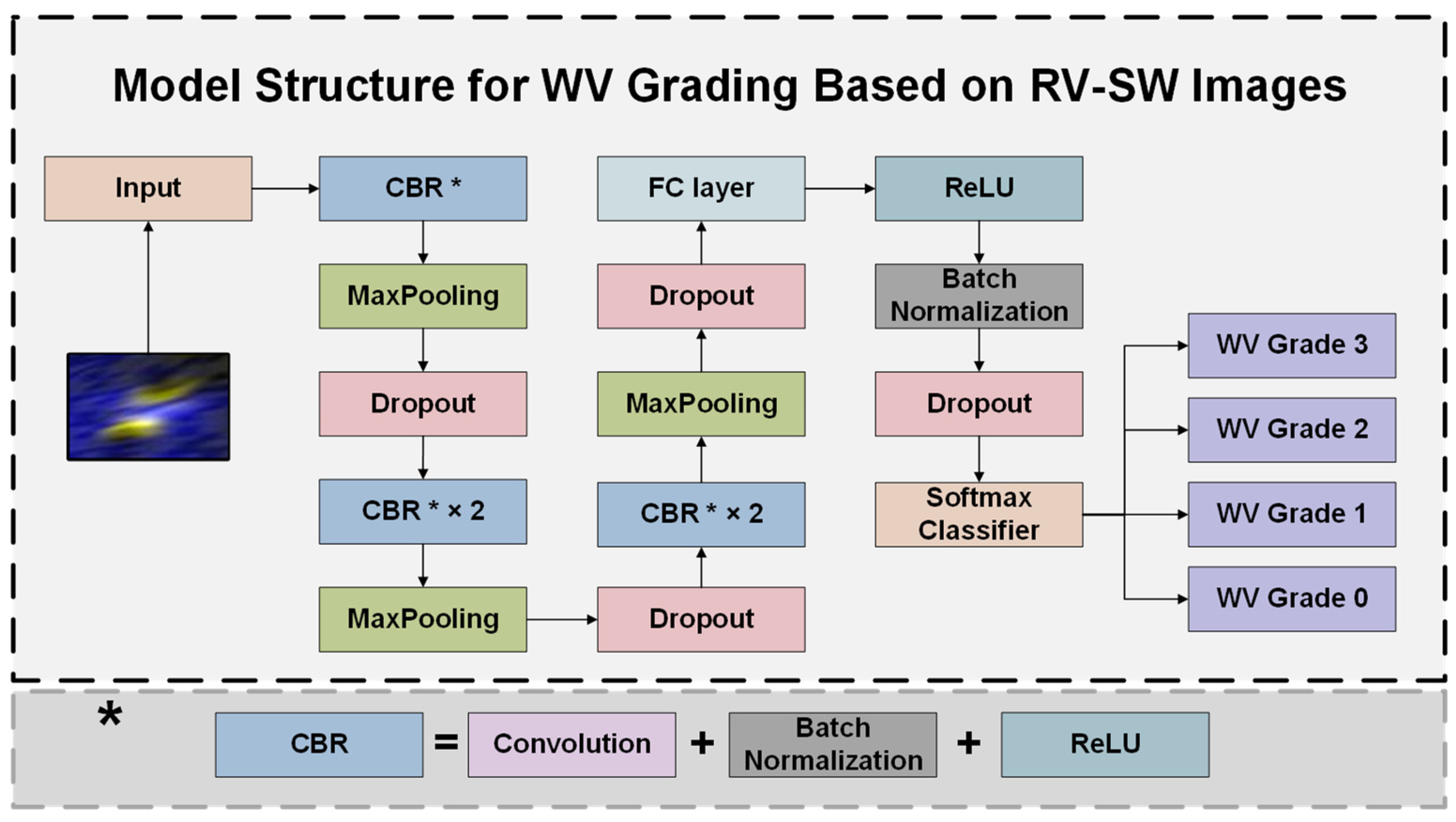
2.2.3. Wake Vortex Grading
2.2.4. Evaluation Metrics
3. Results
3.1. Measurement Cases
3.1.1. Wake Vortex under Stable Meteorological Condition
3.1.2. Wake Vortex under Strong Turbulence Condition
3.2. Statistical Evaluation
3.2.1. Performance of WV Locating Model
- The WV locating model performs well when the training set and the test set are built based on the same data set. The F1-score and mAP of model 1 are 0.97 and 99.4% when applied to the ZUUU test set and 0.60 and 82.8% when applied to the ZSQD test set. It can be seen that model 1 has good performance on the ZUUU test set but does not perform well on the ZSQD test set. The Precision value of 97.8% means that most of the wake vortices identified using the CNN algorithm are consistent with the reference values in the data set, but the Recall value of 43.8% shows that more than half of the wake vortex cannot be identified.
- A new model can be obtained by adding data from a specified airport to build a new training set or continually training based on a current model, showing better performance at the specified airport. Model 3 was trained on the ZSQD data set based on model 1, and the Precision value decreases while the Recall value increases when applying to the ZSQD test set, meaning that the missing wake vortex images of the model are reduced, at the cost of a slight increase in the misidentification rate.
- The model trained on a mixed data set performs better on each test set compared to the model continually trained on the added data based on a current model. Although both model 3 and model 4 were trained based on all data of the two airports, model 4 trained on RV-SW data set 3 performed better with F1-scores of 0.98 and 0.93 and mAPs of 99.9% and 98.6% when applied on the ZUUU test set and ZSQD test set, respectively.
- Models trained on more diverse data sets have higher generalization ability. As mentioned above, the observation environment at ZSQD was more complicated than that at ZUUU, which means the data set established at the former airport is more diverse than the data set formed based on the latter. The F1-score and mAP of model 2 applied on the ZUUU test set are 0.88 and 89.7%, higher than the test results of model 1 applied on the ZSQD test set, for which the parameters are 0.60 and 82.8%.
3.2.2. Performance of WV Grading Model
4. Discussion
5. Conclusions
- A deep learning method for wake vortex locating and grading is presented based on stacked radial velocity and spectrum width images, obtained from FD raw data. Three data sets are built under different meteorological and topographical conditions (ZUUU and ZSQD airports) and used for the training and testing of four WV locating models, to evaluate model performances under different conditions. The WV grading model is trained and tested based on the ZUUU data set, to verify the effectiveness of the model.
- The WV locating models are trained based on different data sets, showing certain differences in the test sets. The performance of the models can be summarized as follows: The WV locating model performs well when the training set and the test set are built based on the same data set. A new model can be obtained by adding data from a specified airport to build a new training set or continually training based on a current model, showing better performance at the specified airport. The model trained on a mixed data set performs better on each test set compared to the model continually trained on the added data based on a current model. Models trained on more diverse data sets have higher generalization ability.
- The WV grading model is verified to be effective for the classification of WV region images. The removal of the non-WV region could amplify wake vortex features, to improve the accuracy of the model. According to the confusion matrix and statistical evaluation parameters, the predicted results are in good agreement with the wake vortex reference values, based on the analytical algorithm and empirical correction.
- The deep learning method in this paper has good performance not only when applied to the well-structured wake vortex but also to wake vortices under strong turbulence conditions, where the analytical algorithm cannot recognize the structure of the wake vortex. The deep learning algorithm and the analytical algorithm have been verified for consistency. The former exhibits better robustness and a faster processing speed of approximately 15 s.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Breitsamter, C. Wake vortex characteristics of transport aircraft. Prog. Aerosp. Sci. 2011, 47, 89–134. [Google Scholar] [CrossRef]
- Wu, S.; Zhai, X.; Liu, B. Aircraft wake vortex and turbulence measurement under near-ground effect using coherent Doppler lidar. Opt. Express 2019, 27, 1142–1163. [Google Scholar] [CrossRef] [PubMed]
- Gerz, T.; Holzäpfel, F.; Bryant, W.; Köpp, F.; Frech, M.; Tafferner, A.; Winckelmans, G. Research towards a wake-vortex advisory system for optimal aircraft spacing. C. R. Phys. 2005, 6, 501–523. [Google Scholar] [CrossRef]
- Hinton, D.A. A Candidate Wake Vortex Intensity Definition for Application to the NASA Aircraft Vortex Spacing System (AVOSS); National Aeronautics and Space Administration, Langley Research Center: Washington, DC, USA, 1997; Volume 110343, pp. 4–25. [Google Scholar]
- Perry, R.; Hinton, D.; Stuever, R.; Perry, R.; Hinton, D.; Stuever, R. NASA wake vortex research for aircraft spacing. In Proceedings of the 35th Aerospace Sciences Meeting and Exhibit, Hampton, VA, USA, 6–9 January 1997. [Google Scholar] [CrossRef]
- Hallock, J.N.; Holzäpfel, F. A review of recent wake vortex research for increasing airport capacity. Prog. Aerosp. Sci. 2018, 98, 27–36. [Google Scholar] [CrossRef]
- Hennemann, I.; Holzäpfel, F. Large-eddy simulation of aircraft wake vortex deformation and topology. Proc. Inst. Mech. Eng. 2011, 225, 1336–1350. [Google Scholar] [CrossRef]
- Brandon, J.M.; Jordan, F.L., Jr.; Stuever, R.A.; Buttrill, C.W. Application of Wind Tunnel Free-Flight Technique for Wake Vortex Encounters; No. NAS 1.60: 3672; NASA Center for AeroSpace Information: Linthicum Heights, MD, USA, 1997. [Google Scholar]
- Köpp, F.; Rahm, S.; Smalikho, I. Characterization of aircraft wake vortices by 2-μm pulsed Doppler lidar. J. Atmos. Ocean Technol. 2004, 21, 194–206. [Google Scholar] [CrossRef]
- Rahm, S.; Smalikho, I. Aircraft wake vortex measurement with airborne coherent Doppler lidar. J. Aircr. 2008, 45, 1148–1155. [Google Scholar] [CrossRef]
- Smalikho, I.N. Taking into account the ground effect on aircraft wake vortices when estimating their circulation from lidar measurements. Atmos. Ocean. Opt. 2019, 32, 686–700. [Google Scholar] [CrossRef]
- Smalikho, I.N.; Banakh, V.A.; Holzäpfel, F.; Rahm, S. Method of radial velocities for the estimation of aircraft wake vortex parameters from data measured by coherent Doppler lidar. Opt. Express 2015, 23, A1194–A1207. [Google Scholar] [CrossRef] [PubMed]
- Hallermeyer, A.; Dolfi-Bouteyre, A.; Valla, M.; Brusquet, L.L.; Fleury, G.; Thobois, L.P.; Cariou, J.-P.; Duponcheel, M.; Winckelmans, G. Development and assessment of a Wake Vortex characterization algorithm based on a hybrid LIDAR signal processing. In Proceedings of the 8th AIAA Atmospheric and Space Environments Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, X.; Zhai, X.; Zhang, H.; Liu, B.; Wu, S. Observation of aircraft wake vortex evolution under crosswind conditions by pulsed coherent Doppler lidar. Atmosphere 2020, 12, 49. [Google Scholar] [CrossRef]
- Pan, W.; Duan, Y.; Zhang, Q.; Tang, J.; Zhou, J. Deep learning for aircraft wake vortex identification. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019. [Google Scholar] [CrossRef]
- Pan, W.; Yi, H.; Leng, Y.; Zhang, X. Recognition of aircraft wake vortex based on random forest. IEEE Access 2022, 10, 8916–8923. [Google Scholar] [CrossRef]
- Pan, W.; Wu, Z.; Zhang, X. Identification of aircraft wake vortex based on SVM. Math. Probl. Eng. 2020, 2020, 9314164. [Google Scholar] [CrossRef]
- Duan, Y.; Yi, W. Research on aircraft wake vortex recognition based on YOLO artificial intelligence. J. Ordnance Equip. Eng. 2020, 41, 242–247. [Google Scholar]
- Wartha, N.; Stephan, A.; Holzäpfel, F.; Rotshteyn, G. Characterizing aircraft wake vortex position and intensity using LiDAR measurements processed with artificial neural networks. Opt. Express 2022, 30, 13197–13225. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Liu, B.; Liu, J.; Zhai, X.; Feng, C.; Wang, G.; Zhang, H.; Yin, J.; Wang, X.; Li, R.; et al. Wind turbine wake visualization and characteristics analysis by Doppler lidar. Opt. Express 2016, 24, A762–A780. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, S.; Wang, Q.; Liu, B.; Yin, B.; Zhai, X. Airport low-level wind shear lidar observation at Beijing Capital International Airport. Infrared Phys. Technol. 2019, 96, 113–122. [Google Scholar] [CrossRef]
- Yuan, J.; Xia, H.; Wei, T.; Wang, L.; Yue, B.; Wu, Y. Identifying cloud, precipitation, windshear, and turbulence by deep analysis of the power spectrum of coherent Doppler wind lidar. Opt. Express 2020, 28, 37406–37418. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wu, S.; Liu, X.; Yin, J.; Pan, W.; Wang, X. Observation of aircraft wake vortex based on coherent Doppler lidar. Acta Opt. Sin. 2021, 41, 901001–901018. [Google Scholar]
- Gao, H.; Li, J.; Chan, P.W.; Hon, K.K.; Wang, X. Parameter-retrieval of dry-air wake vortices with a scanning Doppler Lidar. Opt. Express 2018, 26, 16377–16392. [Google Scholar] [CrossRef] [PubMed]
- Sultana, F.; Sufian, A.; Dutta, P. A review of object detection models based on convolutional neural network. Intell. Comput. Image Process. Based Appl. 2020, 1157, 1–16. [Google Scholar] [CrossRef]
- Wang, C.Y.; Liao, H.Y.M.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 13–19 June 2020. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020. [Google Scholar] [CrossRef]
- Holzäpfel, F.; Gerz, T.; Köp, F.; Stumpf, E.; Harri, M.; Youn, R.I.; Dolfi-Bouteyre, A. Strategies for circulation evaluation of aircraft wake vortices measured by lidar. J. Atmos. Ocean. Technol. 2003, 20, 1183–1195. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ZUUU | ZSQD |
|---|---|---|
| Landing | Take-Off | |
| Scanning mode | RHI | RHI |
| Scanning speed | ~1°/s | ~2°/s |
| Azimuth angle | 90° | 260° |
| Elevation angle range | 0~10° | 2~35° |
| Elevation angle resolution | 0.2° | 0.4° |
| Scanning duration | ~10 s | ~17 s |
| Data Sets | Corresponding Model | Airport/No. |
|---|---|---|
| RV-SW data set 1 | WV locating model | ZUUU/1000 |
| RV-SW data set 2 | WV locating model | ZSQD/1000 |
| RV-SW data set 3 | WV locating model | ZUUU/1000 + ZSQD/1000 |
| WV region data set | WV grading model | ZUUU/2000 |
| Parameter | Value |
|---|---|
| Input size | 416 × 416 |
| Classes | 1 |
| Learning rate | 1 × 10−4 |
| Batch size | 4 |
| Iterations | 6400 |
| Intensity Grade | Circulation Value | Number of WV |
|---|---|---|
| Grade 3 | More than 600 | 500 |
| Grade 2 | 350~600 | 500 |
| Grade 1 | 100~350 | 500 |
| Grade 0 | Less than 100 or disturbances | 500 |
| Parameter | Value |
|---|---|
| Input size | 96 × 96 |
| Classes | 4 |
| Learning rate | 5 × 10−4 |
| Batch size | 8 |
| Iterations | 4800 |
| Model | Training and Validation Set | Test Set (Airport/No.) | Precision | Recall | F1 | mAP |
|---|---|---|---|---|---|---|
| 1 | RV-SW data set 1(ZUUU) | ZUUU/200 | 99.5% | 94.1% | 0.97 | 99.4% |
| ZSQD/200 | 97.8% | 43.8% | 0.60 | 82.8% | ||
| 2 | RV-SW data set 2 (ZSQD) | ZUUU/200 | 92.0% | 84.7% | 0.88 | 89.7% |
| ZSQD/200 | 96.2% | 87.1% | 0.91 | 96.7% | ||
| 3 | ZUUU model + ZSQD data set | ZUUU/200 | 99.5% | 94.1% | 0.97 | 99.4% |
| ZSQD/200 | 93.6% | 57.7% | 0.71 | 89.4% | ||
| 4 | RV-SW data set 3 (ZUUU + ZSQD) | ZUUU/200 | 99.0% | 97.5% | 0.98 | 99.9% |
| ZSQD/200 | 98.3% | 87.6% | 0.93 | 98.6% |
| Model | Data Set | Grade | Precision | Recall | F1 |
|---|---|---|---|---|---|
| WV grading model | WV region data set (ZUUU) | 0 | 99.0% | 98.0% | 0.98 |
| 1 | 97.9% | 95.0% | 0.96 | ||
| 2 | 98.0% | 100.0% | 0.99 | ||
| 3 | 97.0% | 96.0% | 0.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, H.; Wang, Q.; Liu, X.; Liu, S.; Zhang, R.; Li, R.; Wu, S. Locating and Grading of Lidar-Observed Aircraft Wake Vortex Based on Convolutional Neural Networks. Remote Sens. 2024, 16, 1463. https://doi.org/10.3390/rs16081463
Zhang X, Zhang H, Wang Q, Liu X, Liu S, Zhang R, Li R, Wu S. Locating and Grading of Lidar-Observed Aircraft Wake Vortex Based on Convolutional Neural Networks. Remote Sensing. 2024; 16(8):1463. https://doi.org/10.3390/rs16081463
Chicago/Turabian StyleZhang, Xinyu, Hongwei Zhang, Qichao Wang, Xiaoying Liu, Shouxin Liu, Rongchuan Zhang, Rongzhong Li, and Songhua Wu. 2024. "Locating and Grading of Lidar-Observed Aircraft Wake Vortex Based on Convolutional Neural Networks" Remote Sensing 16, no. 8: 1463. https://doi.org/10.3390/rs16081463